
Current Sensor Fault Diagnosis and Tolerant Control for Nine-Phase PMSM Drives Based on Improved Axis Rotation


Abstract
:1. Introduction
2. Influence of Current Sensor Faults on Drive Systems
3. Influence of Current Sensor Faults on Motor Drives
- In normal conditions, λ = 1, DC component is zero, so iq1 is equal to iq1_m with no bias.
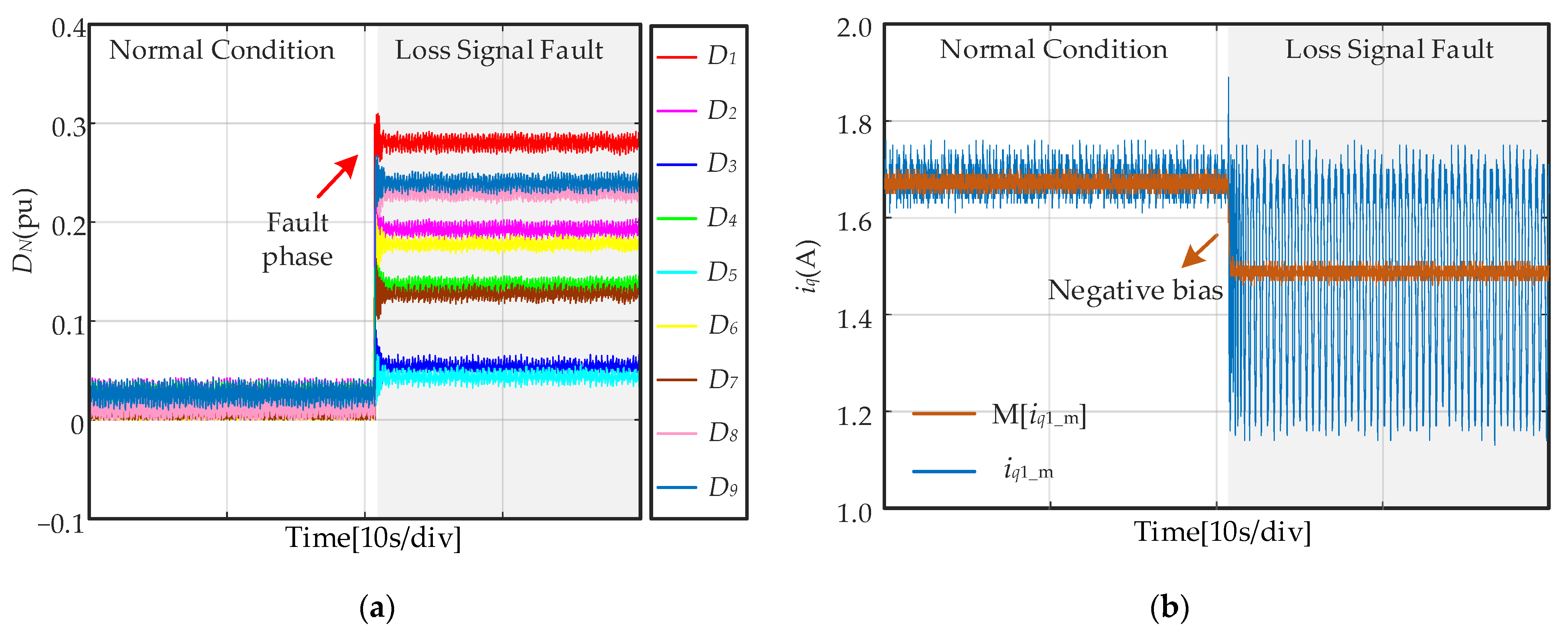
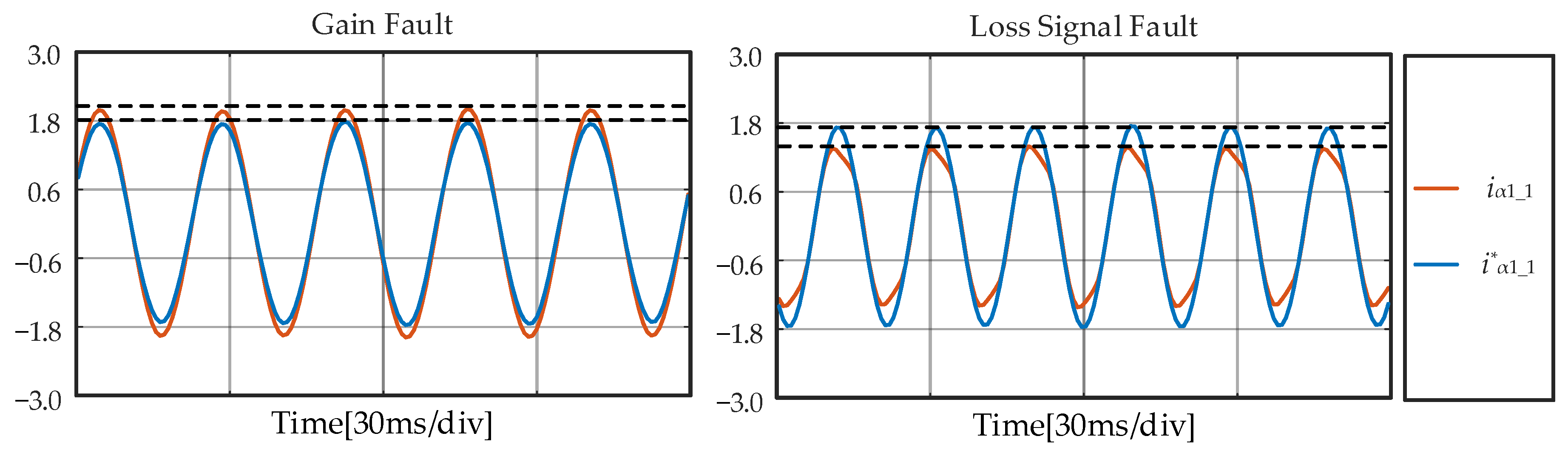
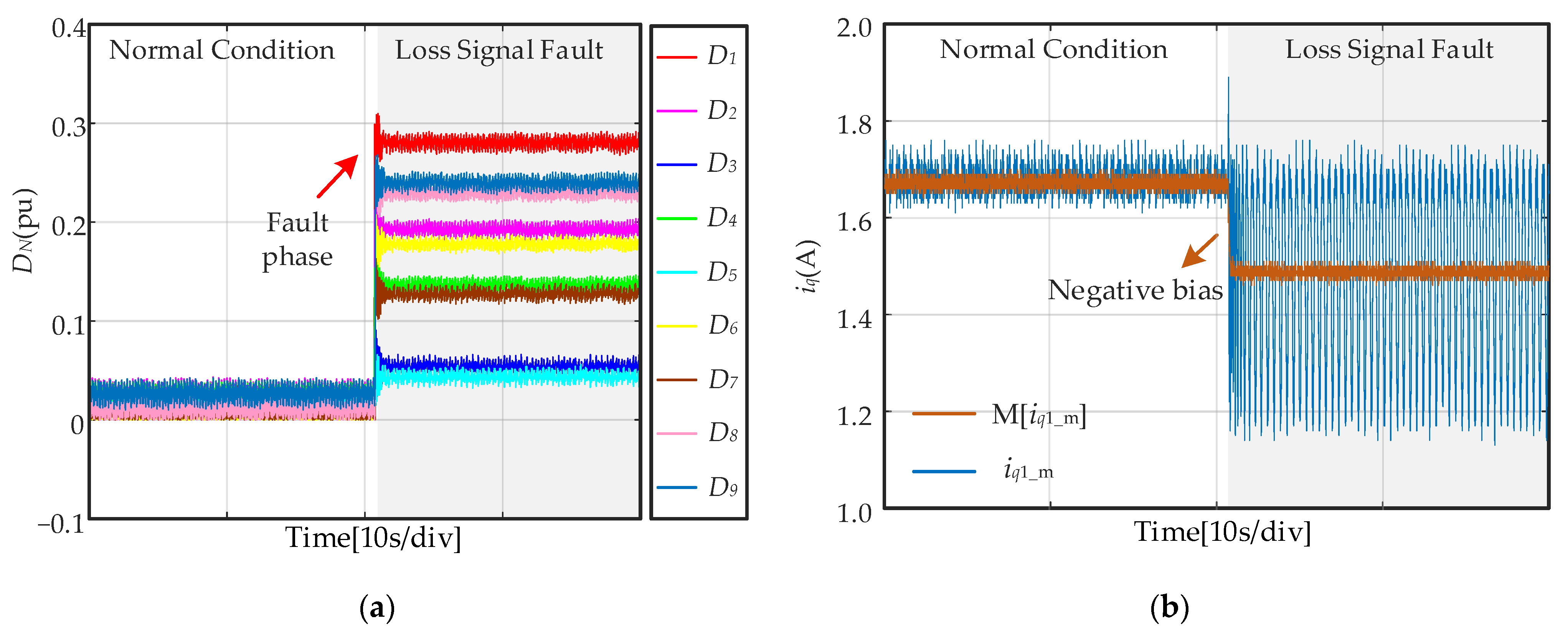
- When loss signal faults occur, the real phase currents are not measured by current sensors. The AC component are zero-mean pulsations; DC component is a bias less than zero due to λ = 0.
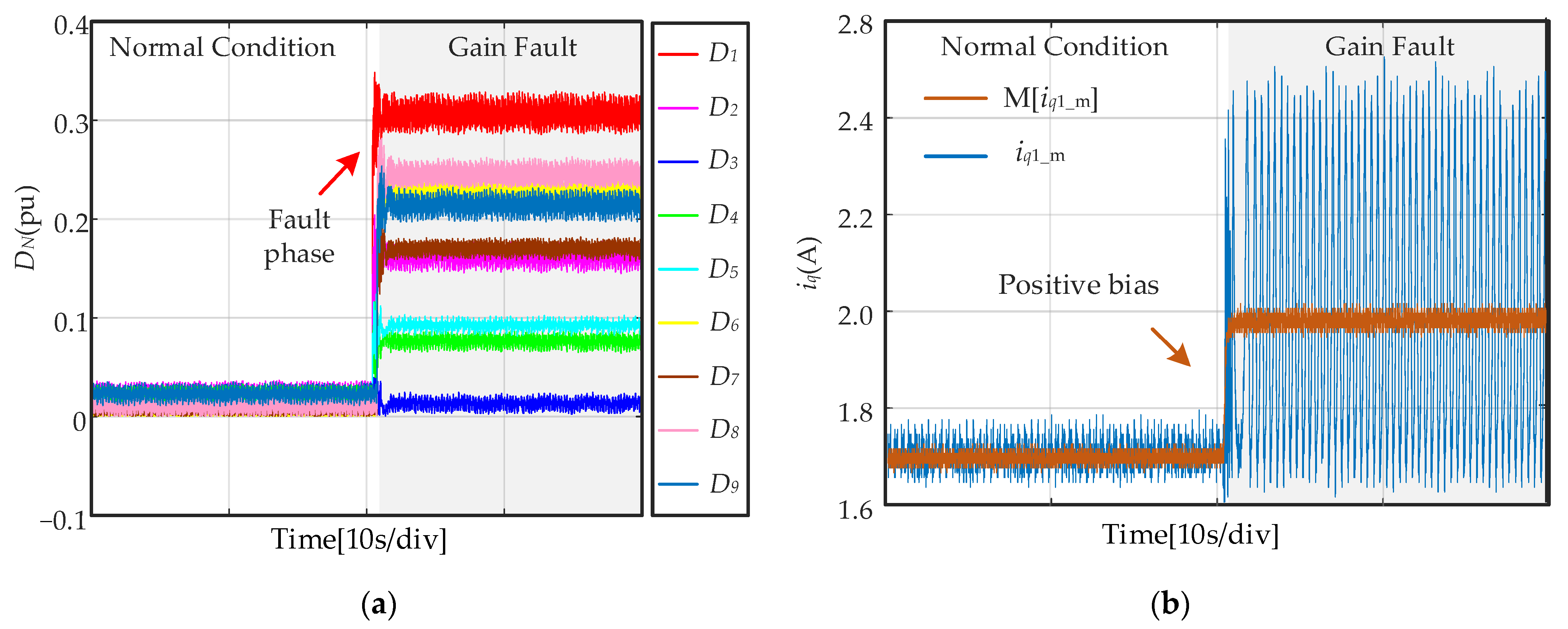
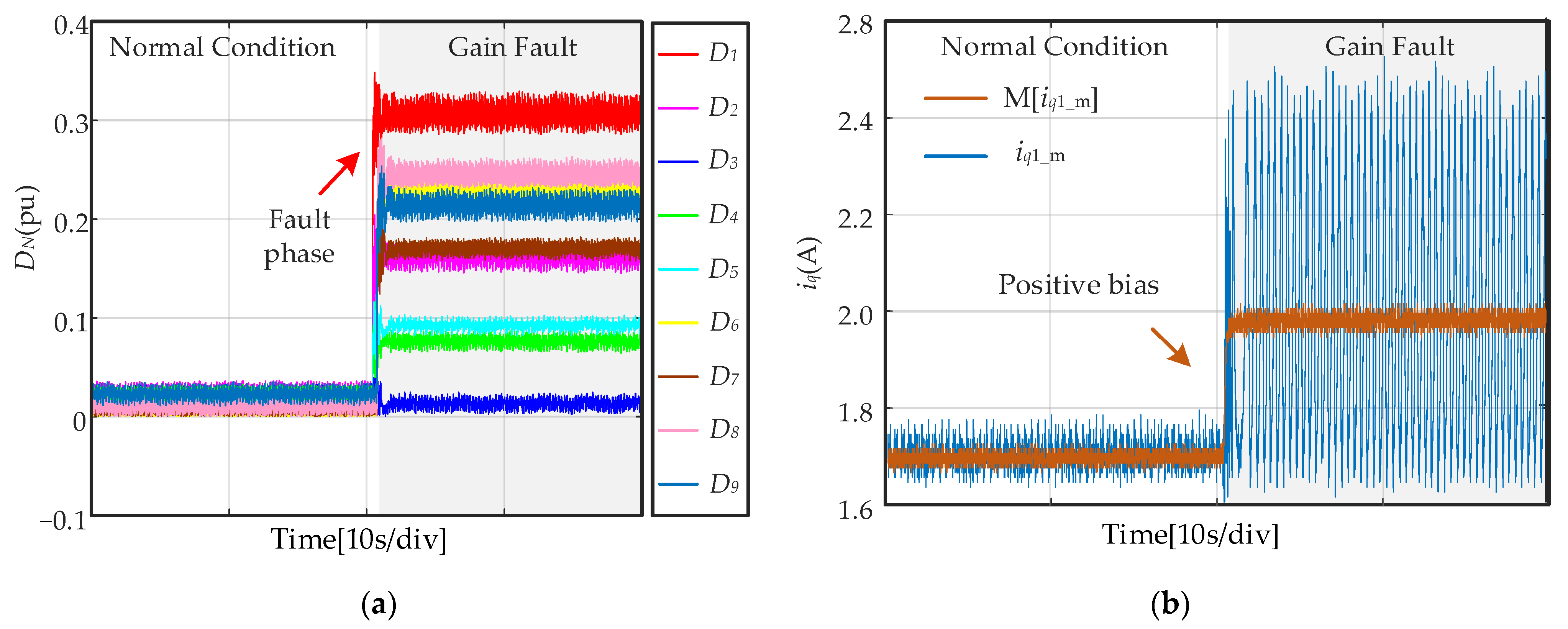
- When gain faults occur, the AC component is still zero-mean pulsations, but the DC component is a bias greater than zero due to λ > 1.
4. Diagnosis for Current Sensors Faults
4.1. Improved Axis Rotation
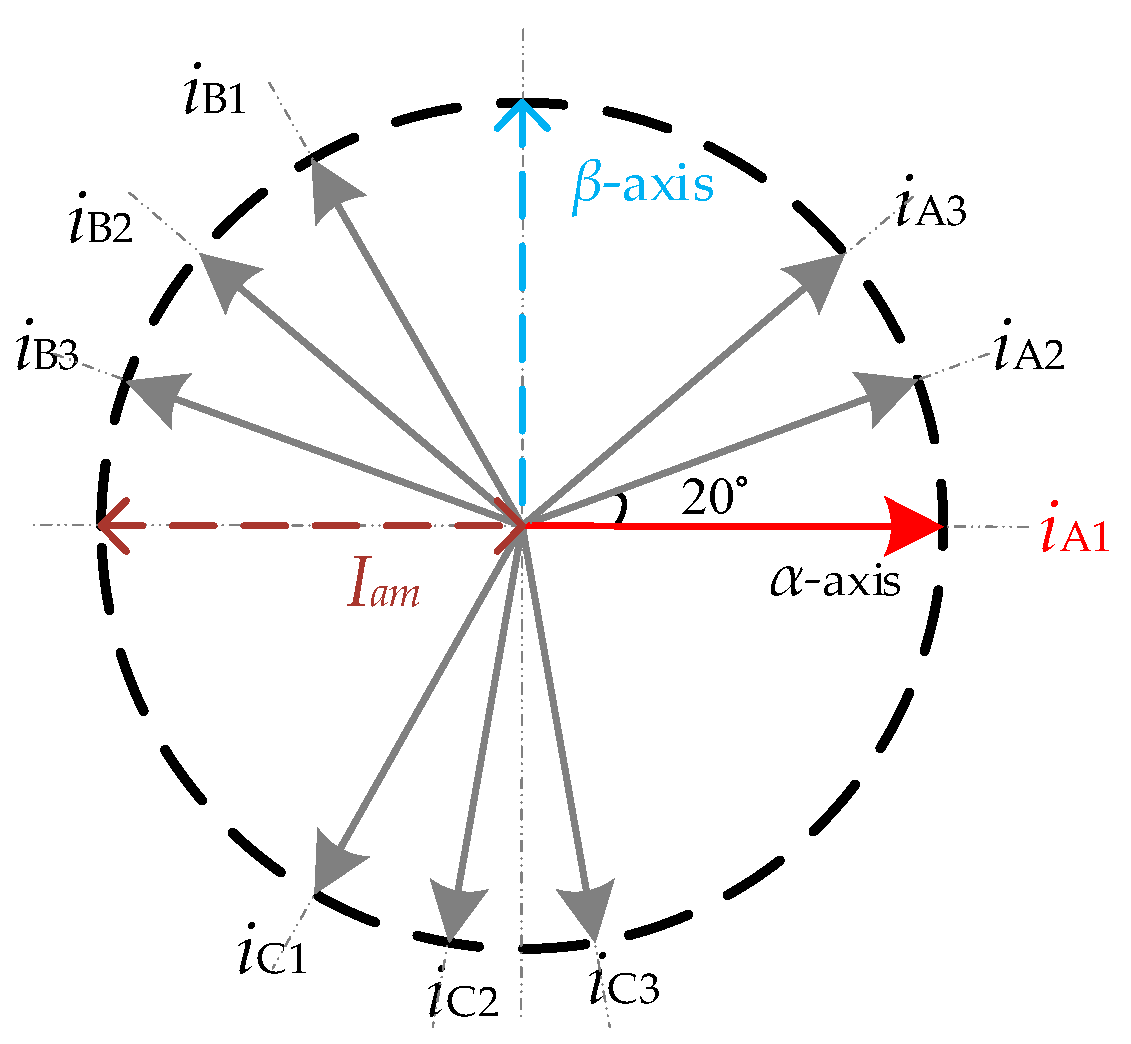
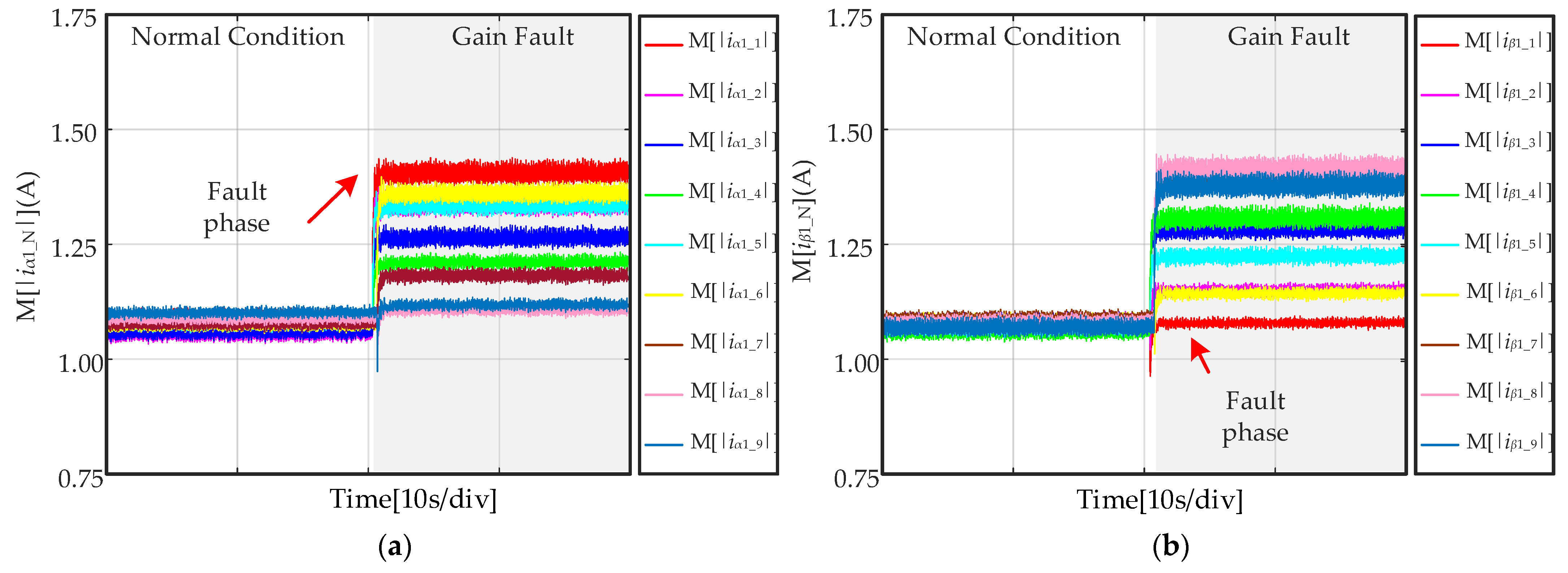
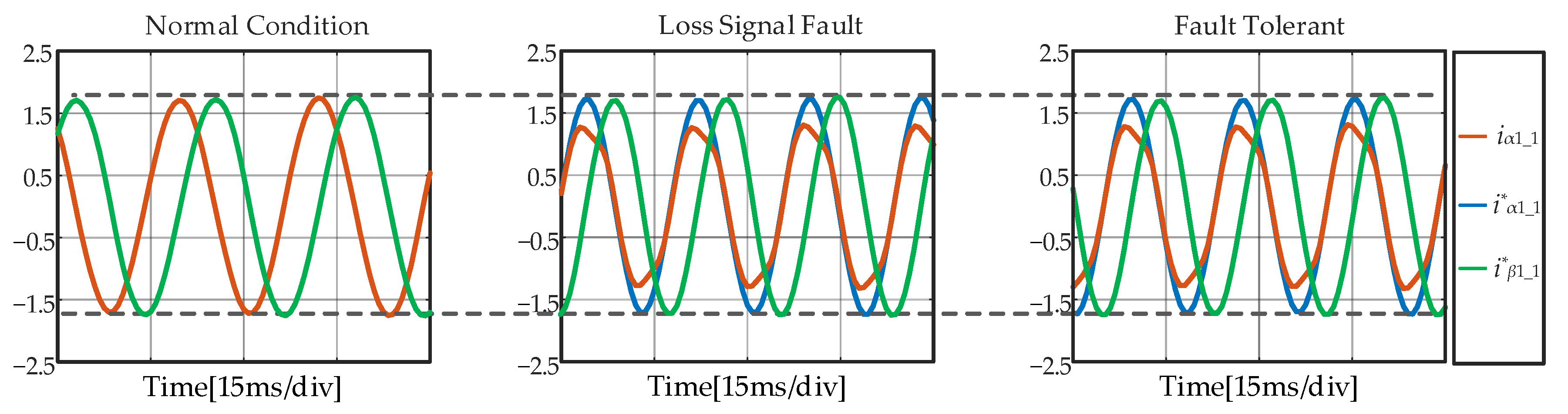
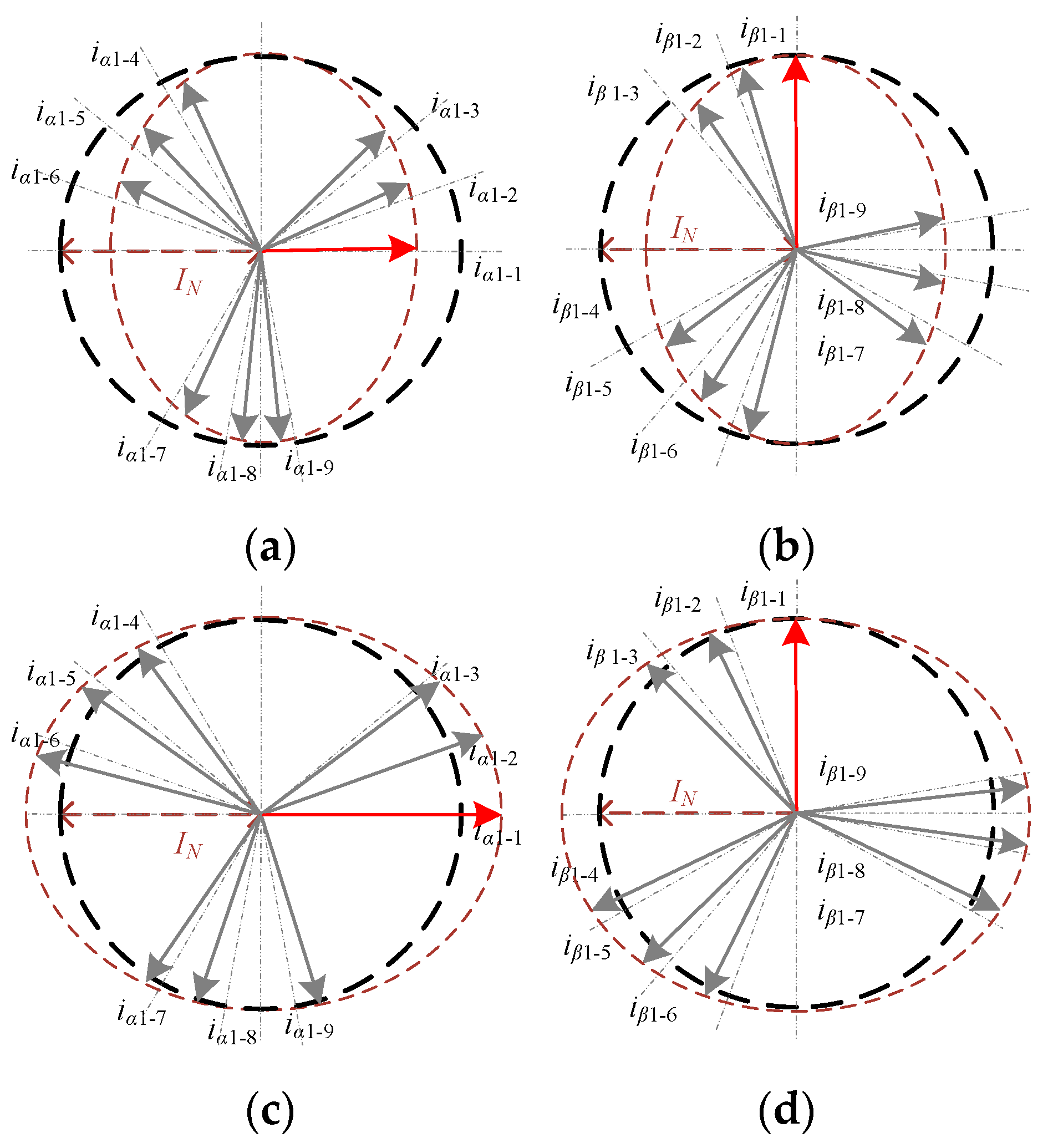
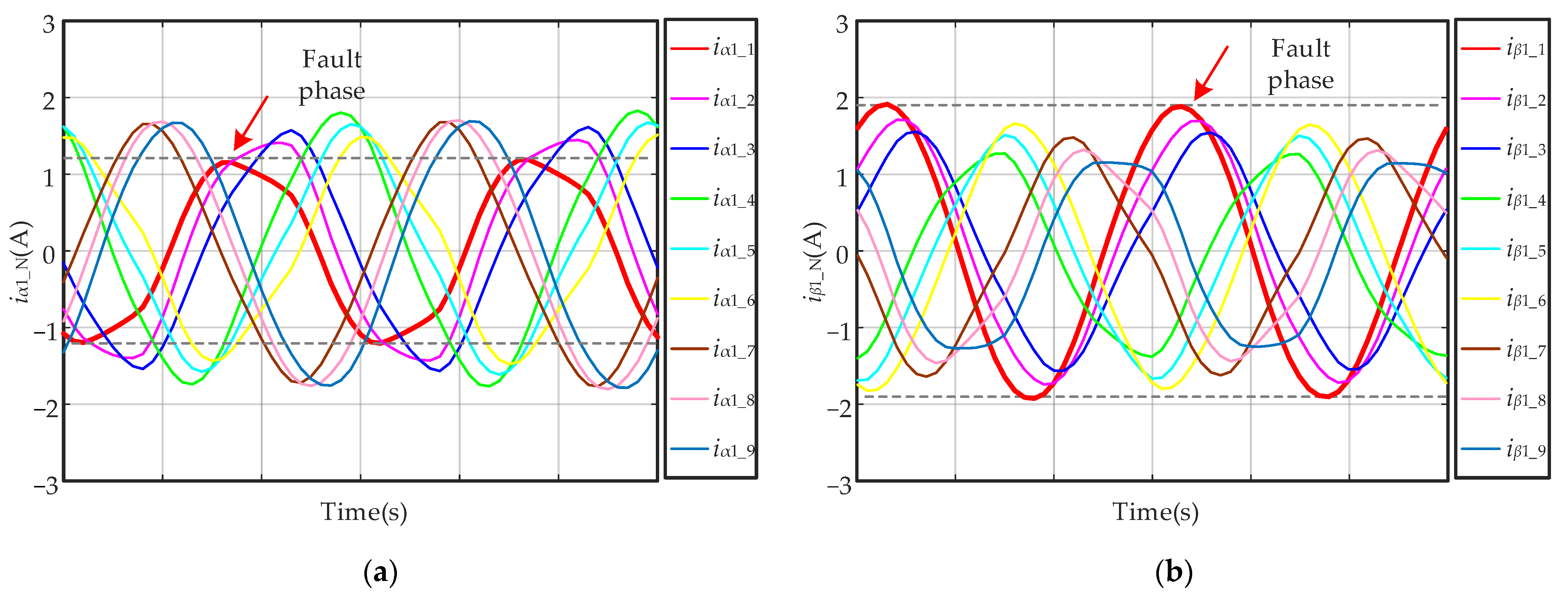
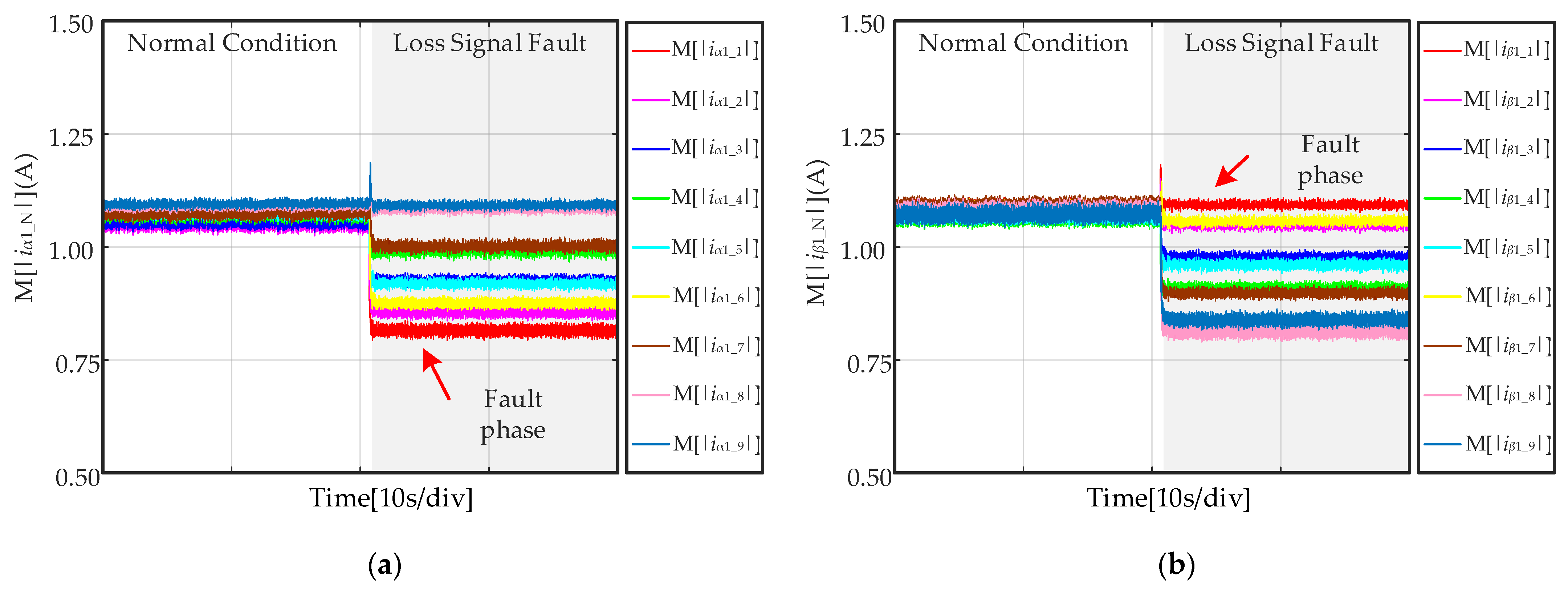
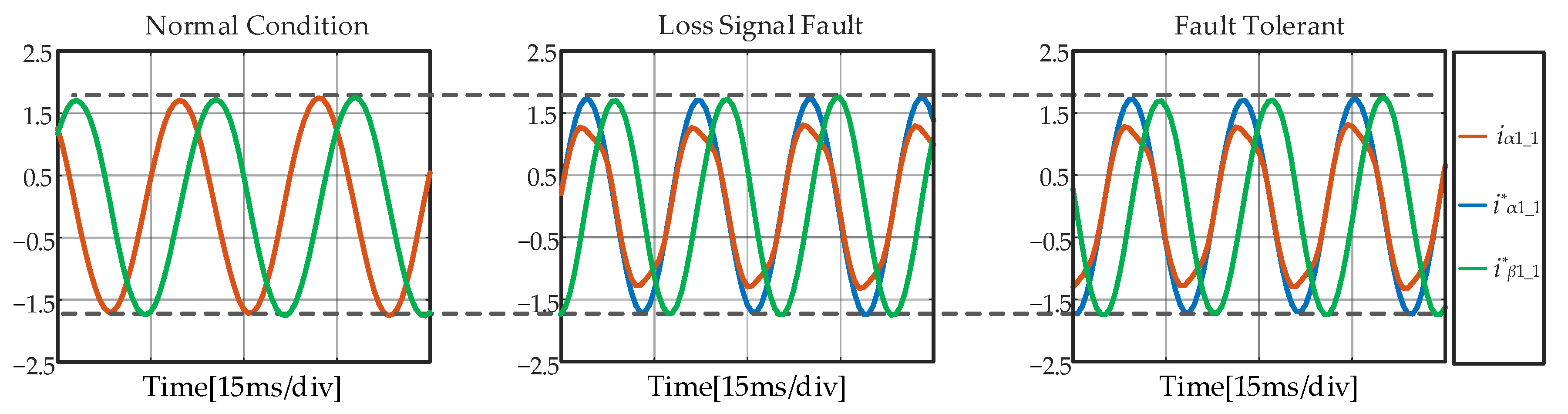
- In normal conditions, nine iα1_N have the same mean value, and so do nine iβ1_N.
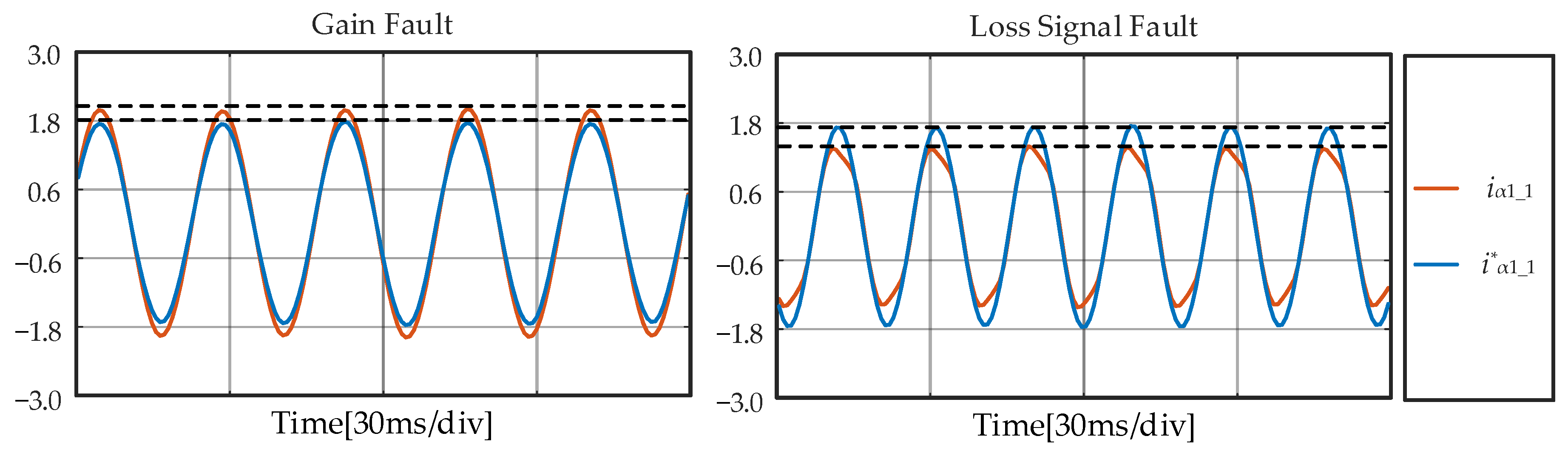
- When loss signal fault (iA1 = 0) occurs in phase-A1, the above formula shows that the iα1_1 changes the most in all iα1_N, which is the equivalent to the iα1_1 losing 100% of iA1, and iα1_1 has the lowest mean value in all iα1_N. Also, iβ1_1 has the smallest change in all iβ1_N, and the other eight iβ1_N have lost sinπ/9, sin2π/9...sin14π/9 times of iα1_1, respectively.
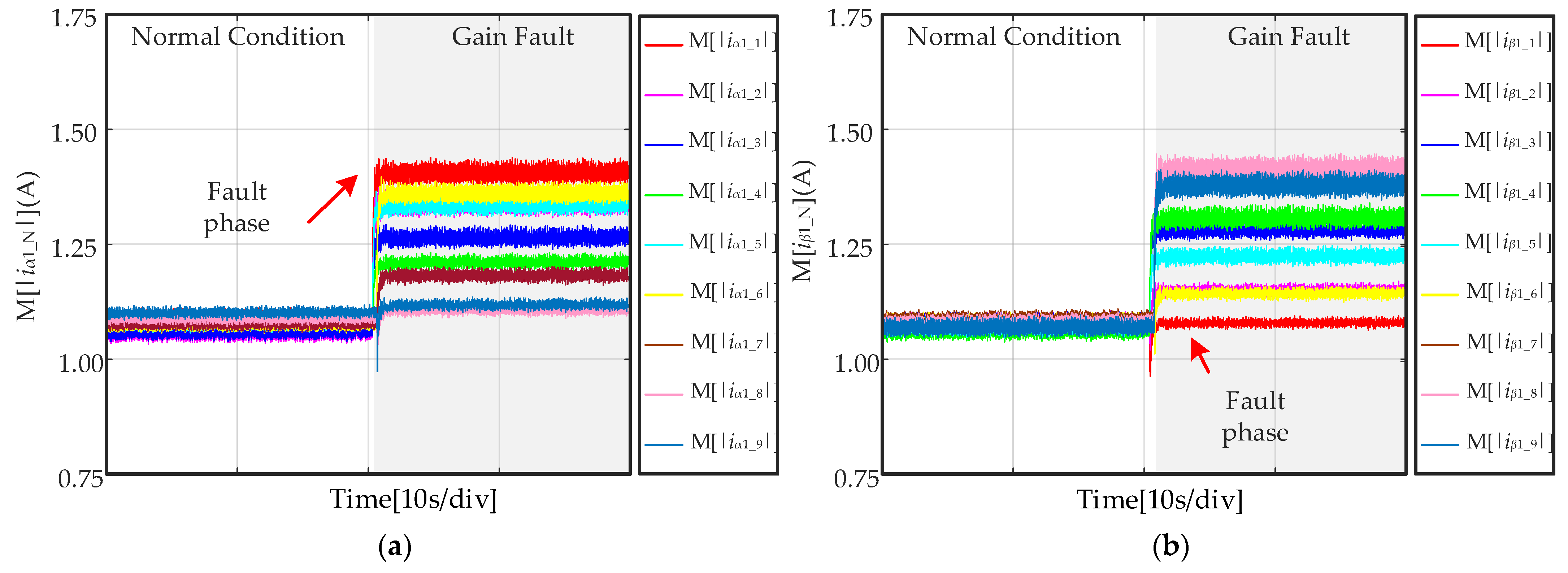
- When gain fault (iA1 =λi*A1) occurs in phase-A1, iα1_1 has the largest change in all iα1_N, equivalent to iα1_1 increased by 100% “(λ − 1)iA1”, which has the largest mean of all iα1_N. Additionally, iβ1_1 has the smallest change in all iβ1_N. The other phases have gained sinπ/9, sin2π/9 … sin14π/9 times of (λ − 1)iA1, respectively. iβ1_1 has the smallest mean in all iβ1_N.
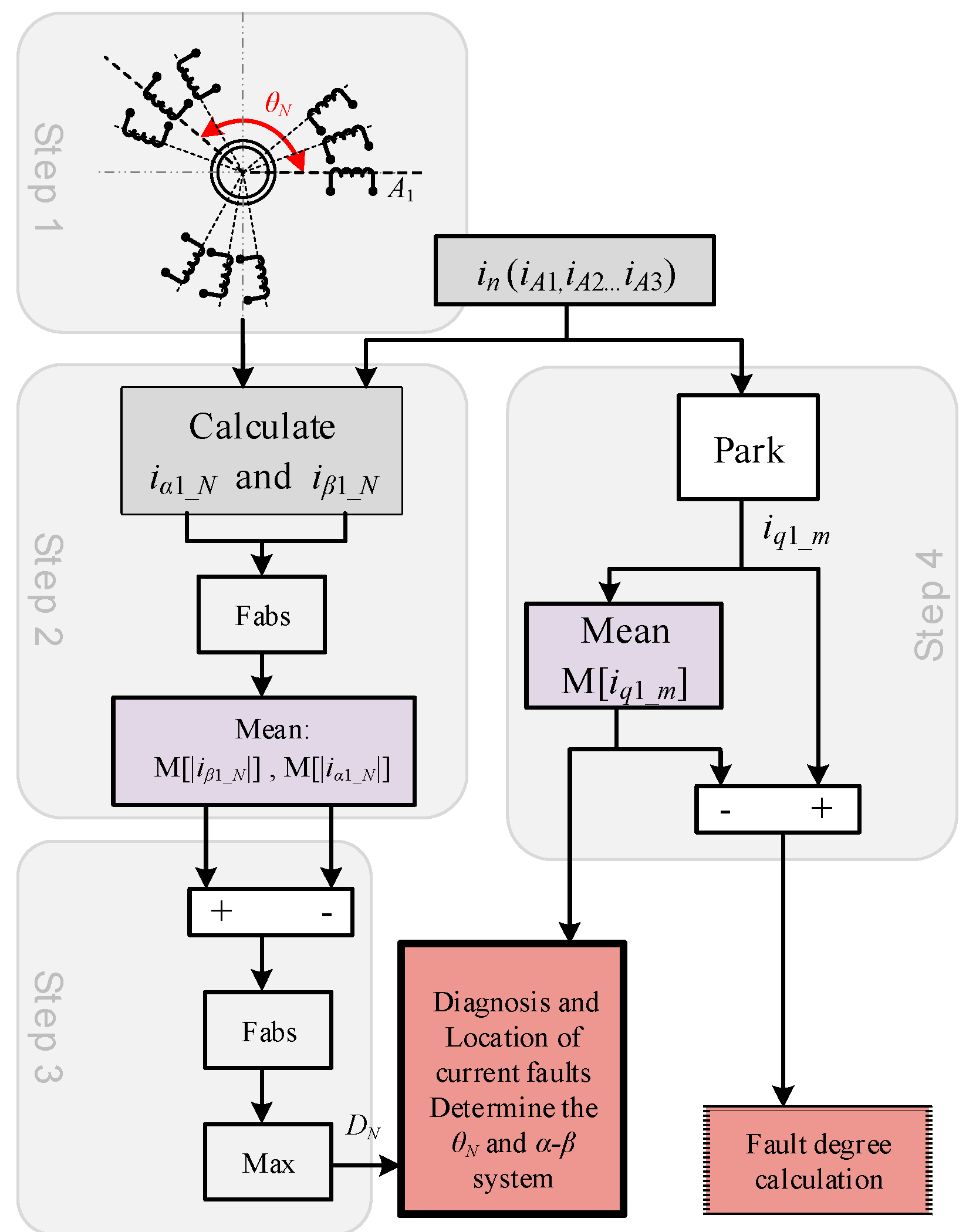
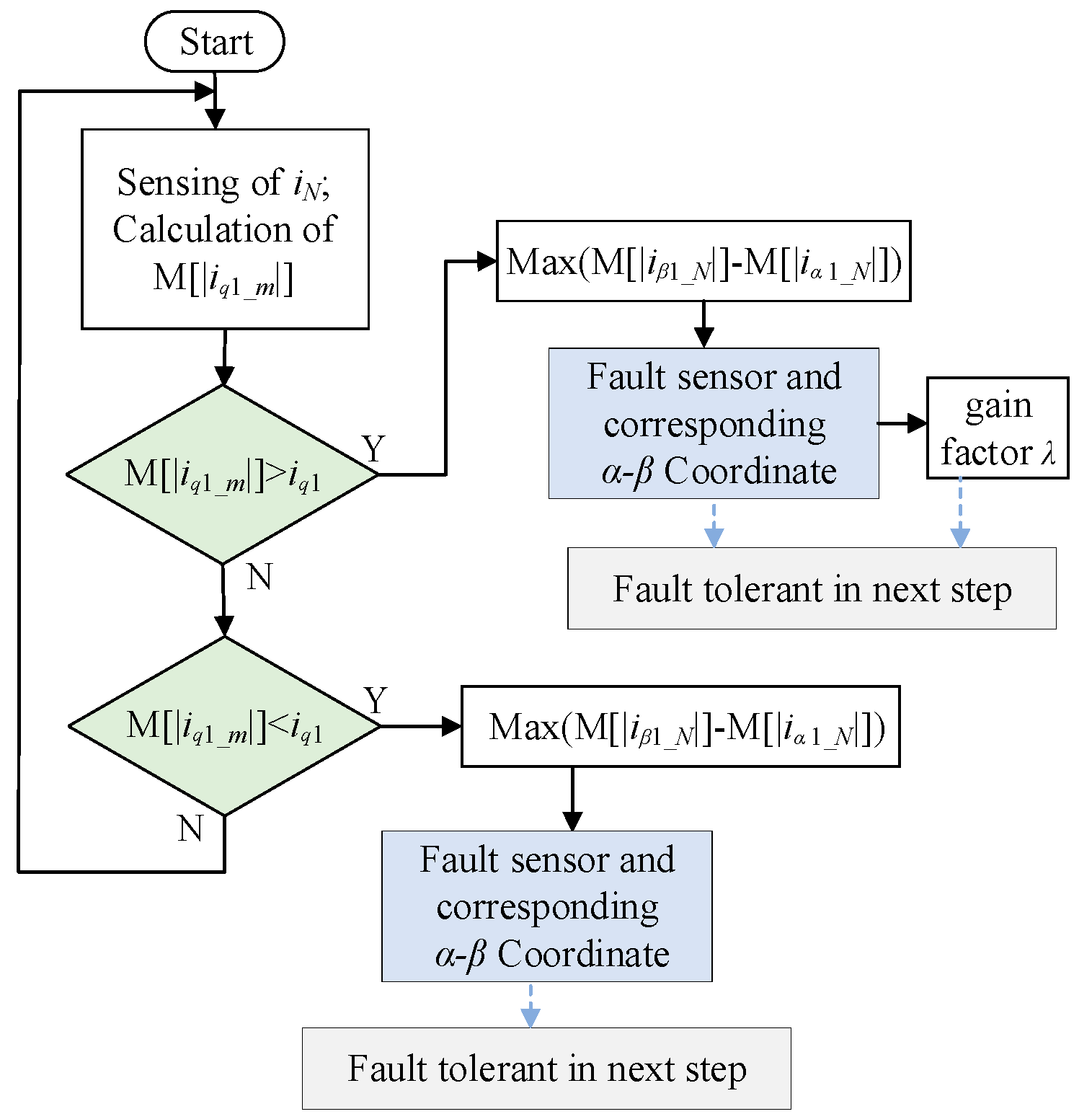
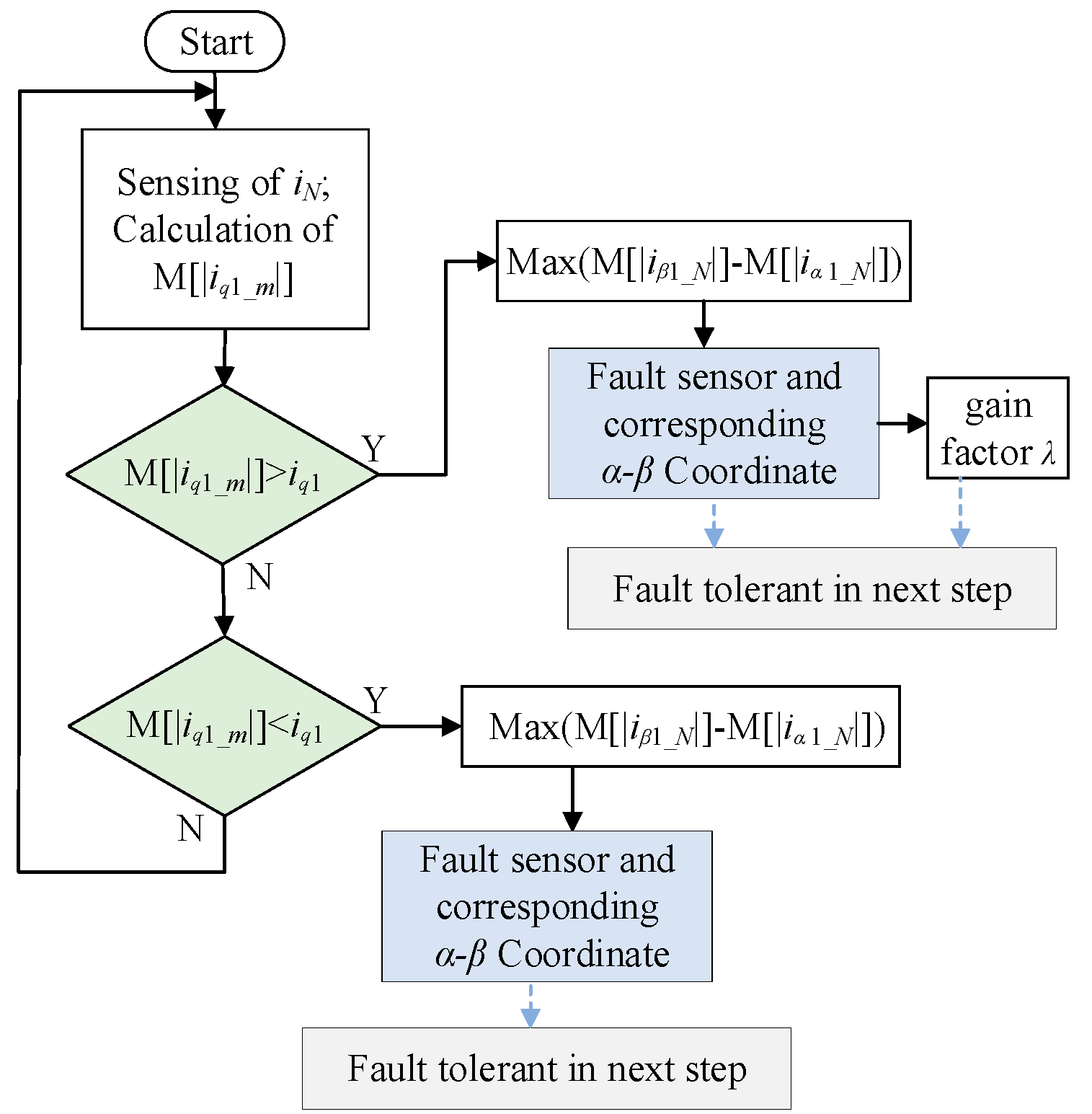
4.2. Diagnosis Strategy
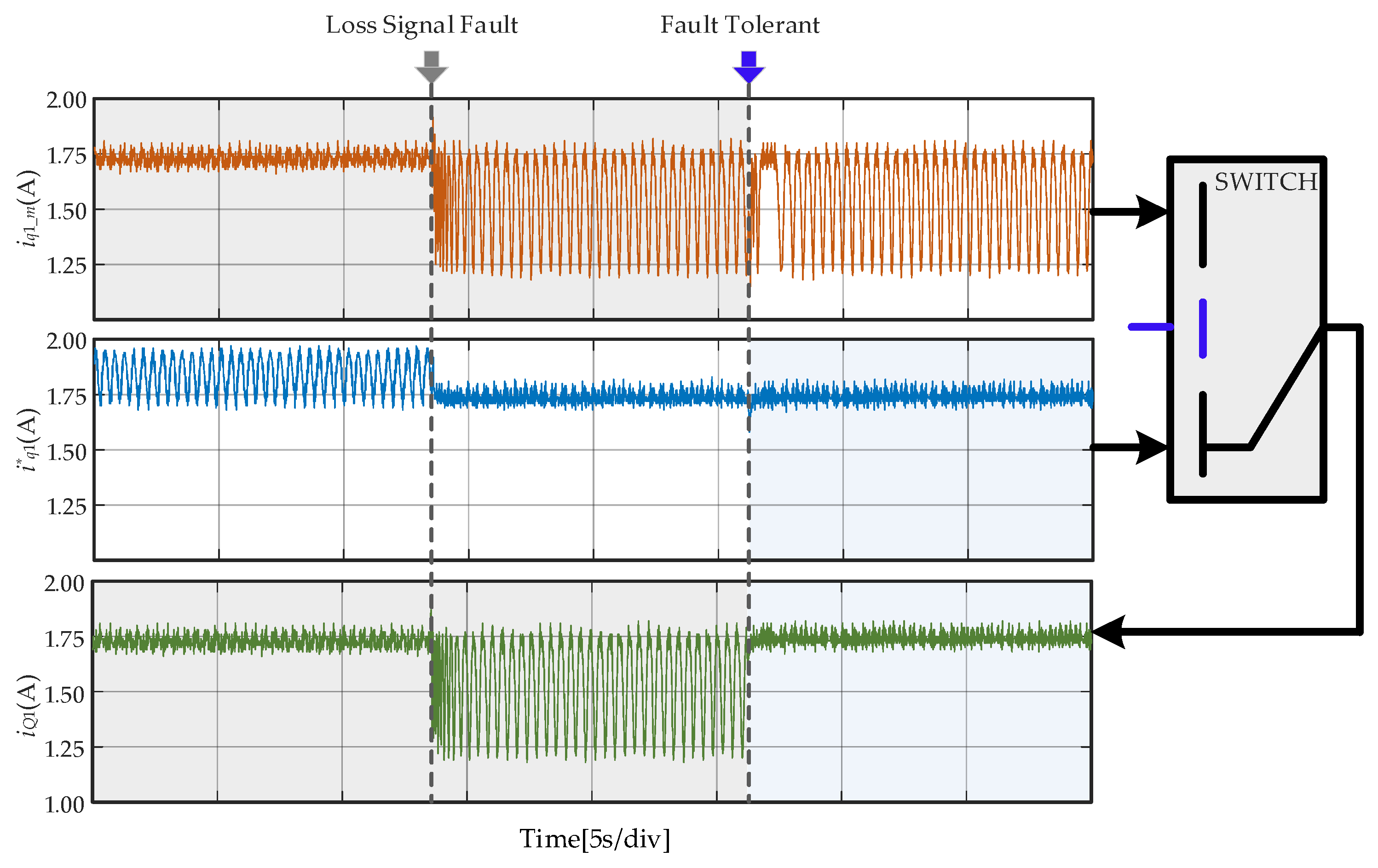
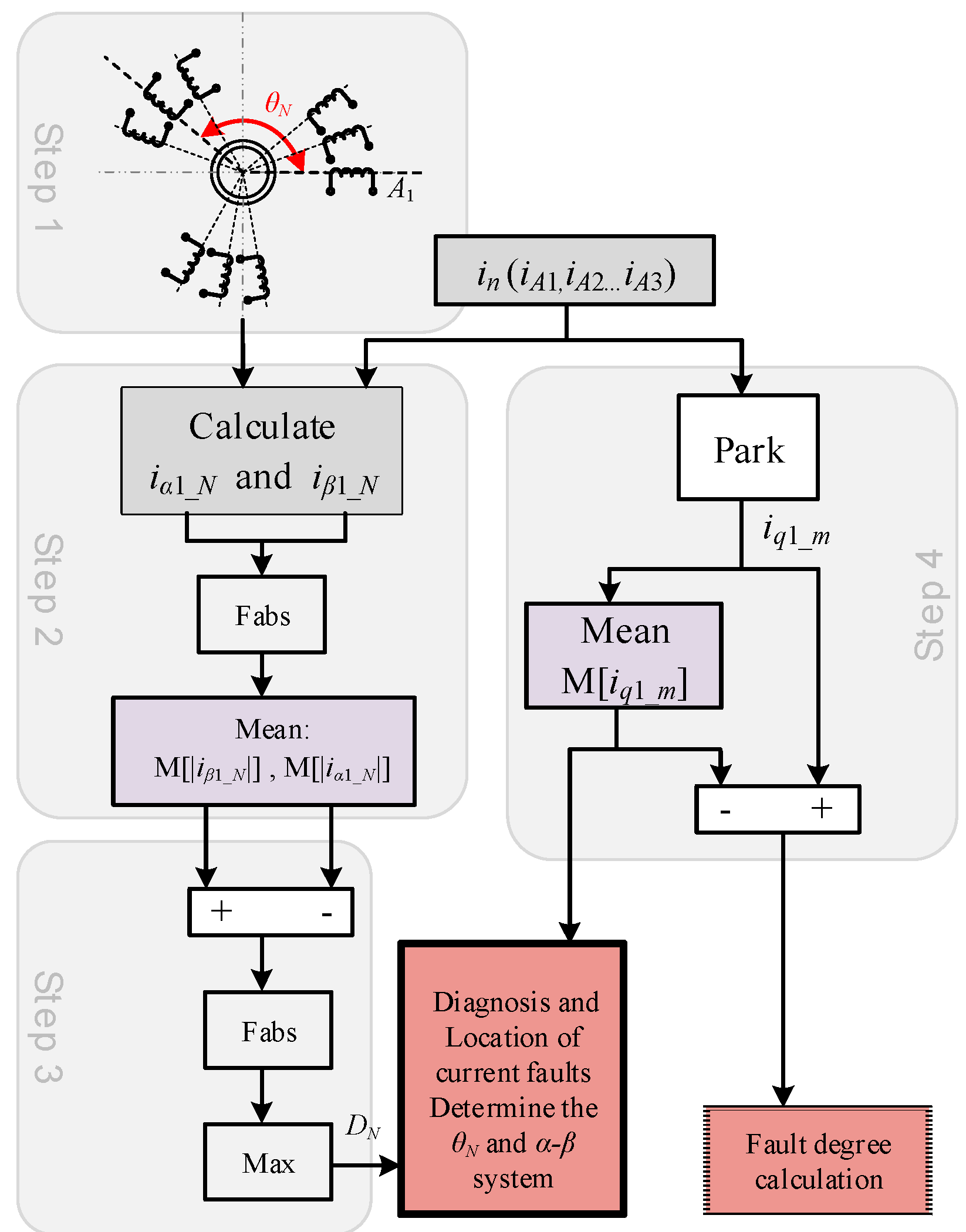
- In normal conditions, λ = 1, DC = 0, M[iq1_m] = iq1_m. There was no change in iq1_m.
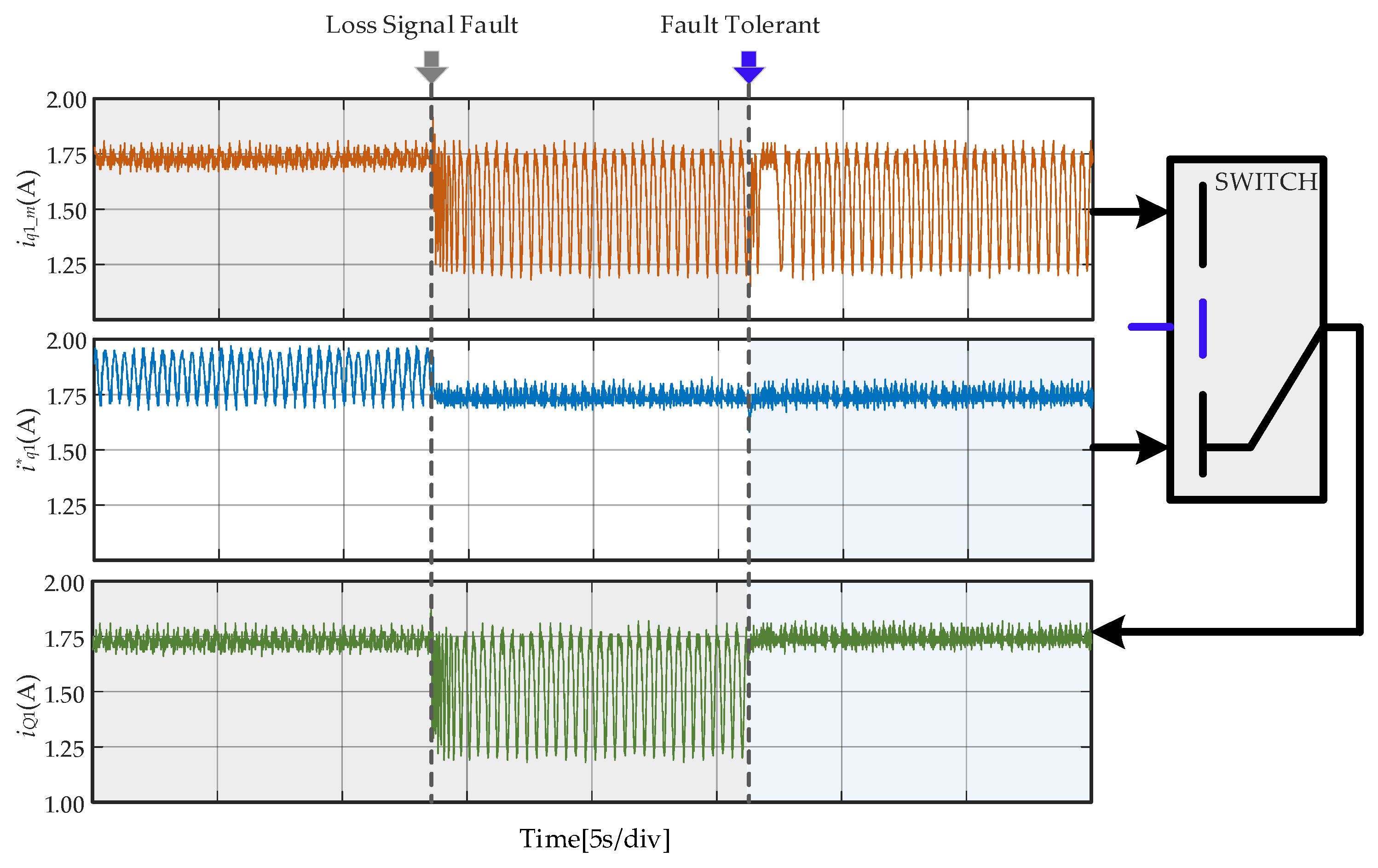
- When loss signal fault occurs, λ = 0, M[AC] is a zero-mean value. So, M[iq1_m] = iq1-Iamsin(θori)/9.
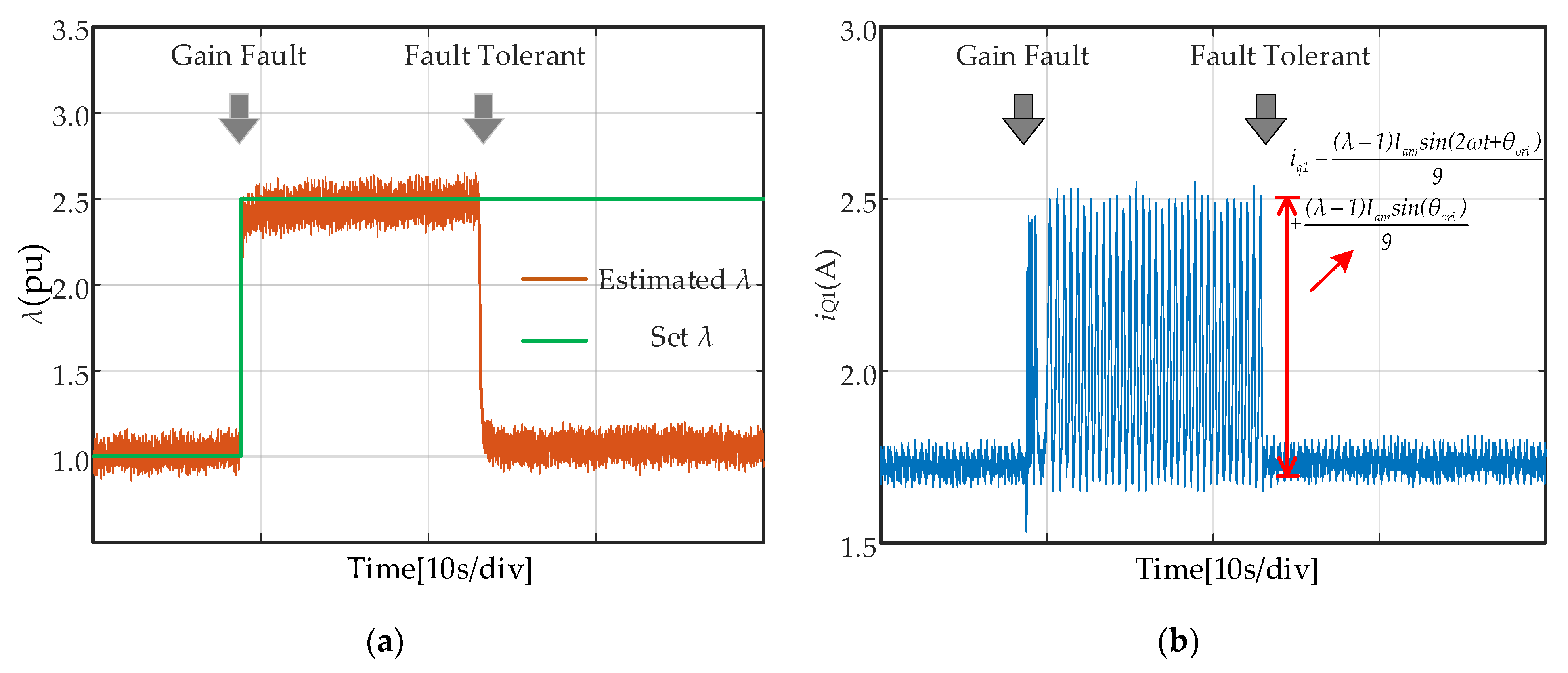
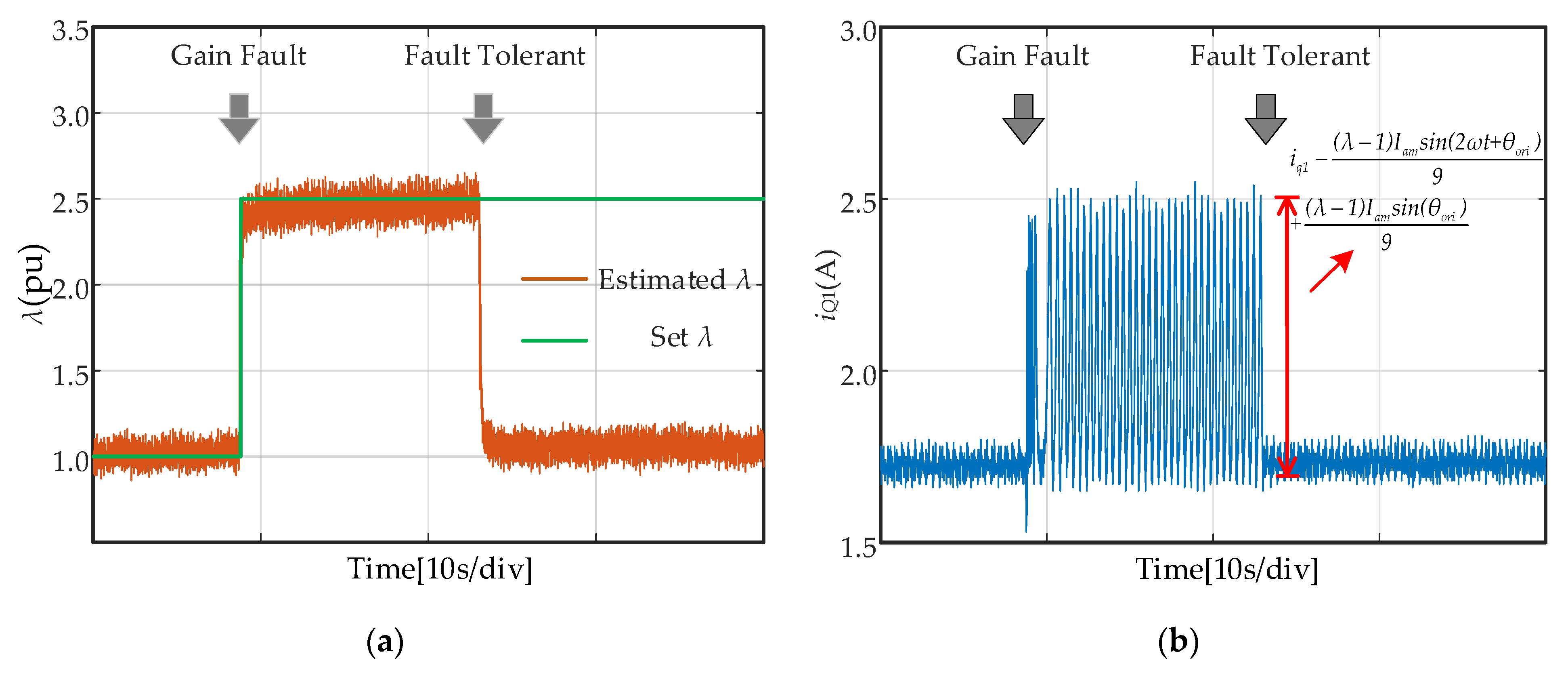
- When gain faults occurs, λ > 1, M[AC] is still a zero-mean value, but M[iq1_m] = iq1 + (λ − 1)Iamsin(θori)/9.
- In normal conditions, iq1_m has no DC component, iq1_m = iq1.
- When loss signal fault occurs, the DC component causes iq1_m to be 1/9 less than the iq1_m in normal conditions, that is, Iamsin(θori)/9 = iq1/9.
- When gain fault occurs, the DC component causes iq1_m more (λ − 1)Iamsin(θori)/9 than iq1_m in normal operation.
5. Tolerant Control of Current Sensors Faults
6. Experimental Verification
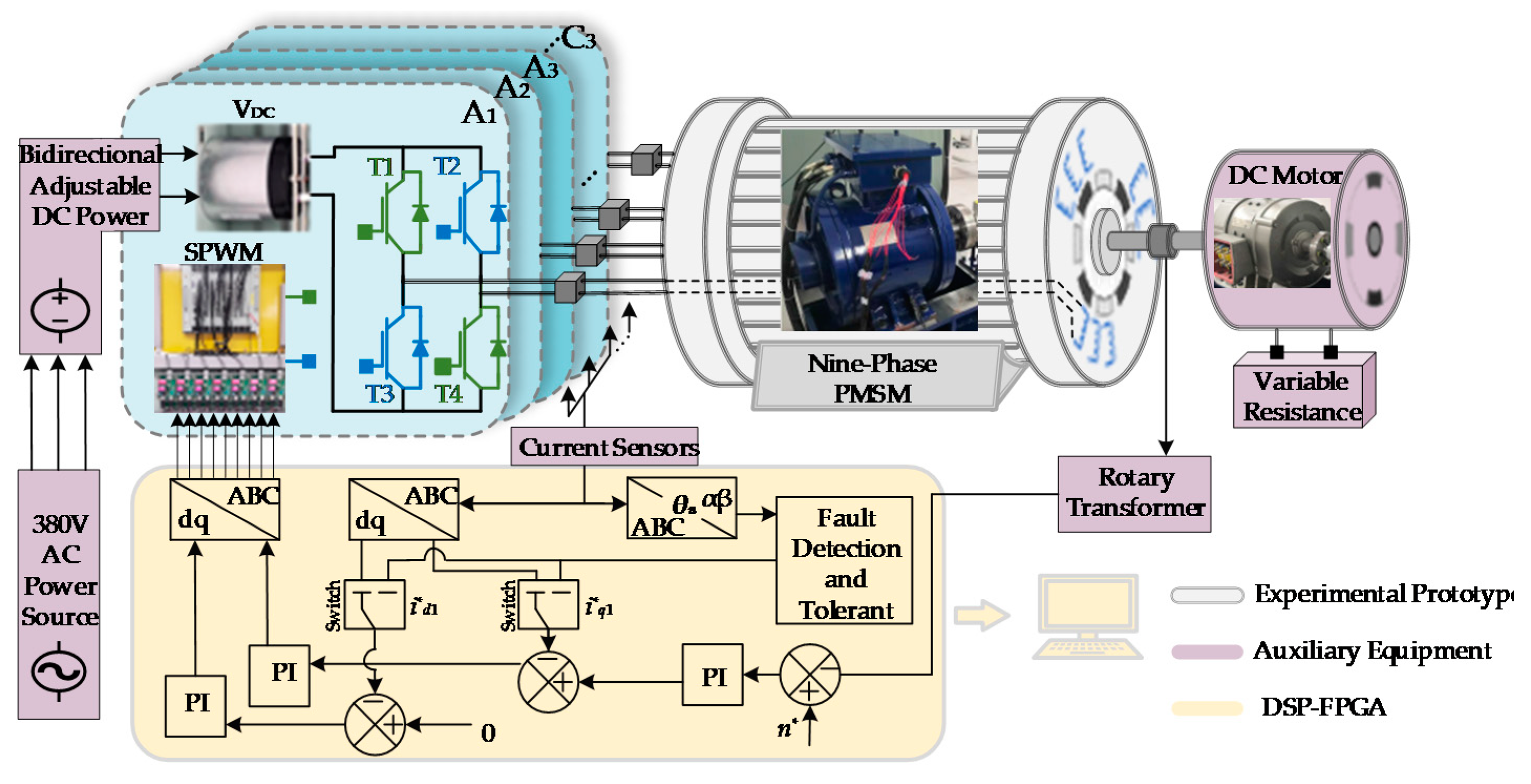
6.1. Experimental Setup
6.2. Loss Signal Fault Diagnosis
6.3. Gain Fault Diagnosis
6.4. Loss Signal Fault Tolerant
6.5. Gain Fault Tolerant
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, Z.; Fang, L.; Jiang, D.; Qu, R. A Machine-Learning-Based Fault Diagnosis Method with Adaptive Secondary Sampling for Multiphase Drive Systems. IEEE Trans. Power Electron. 2022, 37, 8767–8772. [Google Scholar] [CrossRef]
- Chen, C.; Xu, J.; Yuan, X.; Wu, X. Characteristic Analysis of the Peak Braking Force and the Critical Speed of Eddy Current Braking in a High-Speed Maglev. Energies 2019, 12, 2622. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Zheng, X.; Yuan, X.; Wu, X. Low-Complexity Model-Predictive Control for a Nine-Phase Open-End Winding PMSM with Dead-Time Compensation. IEEE Trans. Power Electron. 2022, 37, 8895–8908. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, W.; Wang, S.; Lu, J.; Williams, B.W.; Wang, Q. A Novel Step Current Excitation Control Method to Reduce the Torque Ripple of Outer-Rotor Switched Reluctance Motors. Energies 2022, 15, 2852. [Google Scholar] [CrossRef]
- Wang, H.; Wu, X.; Zheng, X.; Yuan, X. Virtual Voltage Vector Based Model Predictive Control for a Nine-Phase Open-End Winding PMSM With a Common DC Bus. IEEE Trans. Ind. Electron. 2022, 69, 5386–5397. [Google Scholar] [CrossRef]
- Harikumaran, J.; Buticchi, G.; Galea, M.; Wheeler, P. Open Phase Fault Tolerant Control of Multi Three Phase Machines. IEEE Trans. Power Electron. 2021, 2, 535–544. [Google Scholar] [CrossRef]
- Zhao, B.; Gong, J.; Tong, T.; Xu, Y.; Semail, E.; Nguyen, N.K.; Gillon, F. A Novel Five-Phase Fractional Slot Concentrated Winding with Low Space Harmonic Contents. IEEE Trans. Magn. 2021, 57, 1–5. [Google Scholar] [CrossRef]
- Nguyen, N.K.; Meinguet, F.; Semail, E.; Kestelyn, X. Fault-Tolerant Operation of an Open-End Winding Five-Phase PMSM Drive With Short-Circuit Inverter Fault. IEEE Trans. Ind. Electron. 2016, 63, 595–605. [Google Scholar] [CrossRef] [Green Version]
- Foo, G.H.B.; Zhang, X.; Vilathgamuwa, D.M. A Sensor Fault Detection and Isolation Method in Interior Permanent-Magnet Synchronous Motor Drives Based on an Extended Kalman Filter. IEEE Trans. Ind. Electron. 2013, 60, 3485–3495. [Google Scholar] [CrossRef]
- Xiahou, K.S.; Lin, X.; Wu, Q.H. Current sensor fault-tolerant control of DFIGs using stator current regulators and Kalman filters. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting (PESGM), Chicago, IL, USA, 16–20 July 2017; pp. 1–5. [Google Scholar]
- Wang, G.; Hao, X.; Zhao, N.; Zhang, G.; Xu, D. Current Sensor Fault-Tolerant Control Strategy for Encoderless PMSM Drives Based on Single Sliding Mode Observer. IEEE Trans. Transp. Electrific. 2020, 6, 679–689. [Google Scholar] [CrossRef]
- Yu, Y.; Zhao, Y.; Wang, B.; Huang, X.; Xu, D. Current Sensor Fault Diagnosis and Tolerant Control for VSI-Based Induction Motor Drives. IEEE Trans. Power Electron. 2018, 33, 4238–4248. [Google Scholar] [CrossRef]
- Jlassi, I.; Estima, J.; El Khil, O.S.K.; Bellaaj, N.M.; Cardoso, A.J.M. A Robust Observer-Based Method for IGBTs and Current Sensors Fault Diagnosis in Voltage-Source Inverters of PMSM Drives. IEEE Trans. Ind. Appl. 2017, 53, 2894–2905. [Google Scholar] [CrossRef]
- Zhang, G.; Zhou, H.; Wang, G.; Li, C.; Xu, D. Current Sensor Fault-Tolerant Control for Encoderless IPMSM Drives Based on Current Space Vector Error Reconstruction. IEEE J. Emerg. Sel. Topics Power Electron. 2020, 8, 3658–3668. [Google Scholar] [CrossRef]
- Li, Z.; Wheeler, P.; Watson, A.; Costabeber, A.; Wang, B.; Ren, Y.; Bai, Z.; Ma, H. A Fast Diagnosis Method for Both IGBT Faults and Current Sensor Faults in Grid-Tied Three-Phase Inverters with Two Current Sensors. IEEE Trans. Power Electron. 2020, 35, 5267–5278. [Google Scholar] [CrossRef]
- Venghi, L.E.; Aguilera, F.; de la Barrera, P.M.; De Angelo, C.H. Single-Observer Based Current Sensor Fault Tolerant Control for IM Traction Drives. IEEE Lat. Am. Trans. 2021, 19, 2087–2096. [Google Scholar] [CrossRef]
- Sakthivel, R.; Kavikumar, R.; Mohammadzadeh, A.; Kwon, O.-M.; Kaviarasan, B. Fault Estimation for Mode-Dependent IT2 Fuzzy Systems With Quantized Output Signals. IEEE Trans. Fuzz Syst. 2021, 29, 298–309. [Google Scholar] [CrossRef]
- Venghi, L.E.; Aguilera, F.; de la Barrera, P.M.; De Angelo, C.H. Detection and isolation of current-sensor and open-switch faults in electric traction drives. IEEE Latin Am. Trans. 2021, 19, 1335–1346. [Google Scholar] [CrossRef]
- Ruba, M.; Nemeş, R.O.; Ciornei, S.M.; Marţiş, C. Simple and Robust Current Sensor Fault Detection and Compensation Method for 3-Phase Inverters. IEEE Access 2020, 8, 34820–34832. [Google Scholar] [CrossRef]
- Wu, C.; Guo, C.; Xie, Z.; Ni, F.; Liu, H. A Signal-Based Fault Detection and Tolerance Control Method of Current Sensor for PMSM Drive. IEEE Trans. Ind. Electron. 2018, 65, 9646–9657. [Google Scholar] [CrossRef]
- Huang, W.; Du, J.; Hua, W.; Lu, W.; Bi, K.; Zhu, Y.; Fan, Q. Current-Based Open-Circuit Fault Diagnosis for PMSM Drives With Model Predictive Control. IEEE Trans. Power Electron. 2021, 36, 10695–10704. [Google Scholar] [CrossRef]
- Wang, W.; Tian, W.; Wang, Z.; Hua, W.; Cheng, M. A Fault Diagnosis Method for Current Sensors of Primary Permanent-Magnet Linear Motor Drives. IEEE Trans. Power Electron. 2020, 36, 2334–2345. [Google Scholar] [CrossRef]
- Tran, C.D.; Palacky, P.; Kuchar, M.; Brandstetter, P.; Dinh, B.H. Current and Speed Sensor Fault Diagnosis Method Applied to Induction Motor Drive. IEEE Access 2021, 9, 38660–38672. [Google Scholar] [CrossRef]
- Chakraborty, C.; Verma, V. Speed and Current Sensor Fault Detection and Isolation Technique for Induction Motor Drive Using Axes Transformation. IEEE Trans. Ind. Electron. 2015, 62, 1943–1954. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Power | 9 kw |
| Voltage | 234 V |
| Current | 4.6 A |
| Speed | 900 rpm |
| Torque | 95.5 Nm |
| d-axis inductance | 41.2 mH |
| q-axis inductance | 41.2 mH |
| Armature resistance | 2.47 Ω |
| Magnet flux linkage | 0.8524 Wb |
| pole-pairs | 4 |
| Rotational inertia/kg·m2 | 0.03128 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Liu, X.; Zheng, X. Current Sensor Fault Diagnosis and Tolerant Control for Nine-Phase PMSM Drives Based on Improved Axis Rotation. Energies 2022, 15, 4671. https://doi.org/10.3390/en15134671
Zhang X, Liu X, Zheng X. Current Sensor Fault Diagnosis and Tolerant Control for Nine-Phase PMSM Drives Based on Improved Axis Rotation. Energies. 2022; 15(13):4671. https://doi.org/10.3390/en15134671
Chicago/Turabian StyleZhang, Xudong, Xiaoming Liu, and Xiaoqin Zheng. 2022. "Current Sensor Fault Diagnosis and Tolerant Control for Nine-Phase PMSM Drives Based on Improved Axis Rotation" Energies 15, no. 13: 4671. https://doi.org/10.3390/en15134671
APA StyleZhang, X., Liu, X., & Zheng, X. (2022). Current Sensor Fault Diagnosis and Tolerant Control for Nine-Phase PMSM Drives Based on Improved Axis Rotation. Energies, 15(13), 4671. https://doi.org/10.3390/en15134671