
An nth Harmonic Current Suppression Method Based on the Impulse Current PWM Technique for a Multi-Phase Permanent Magnet Synchronous Motor Fed with a Current Source Inverter



Abstract
:1. Introduction
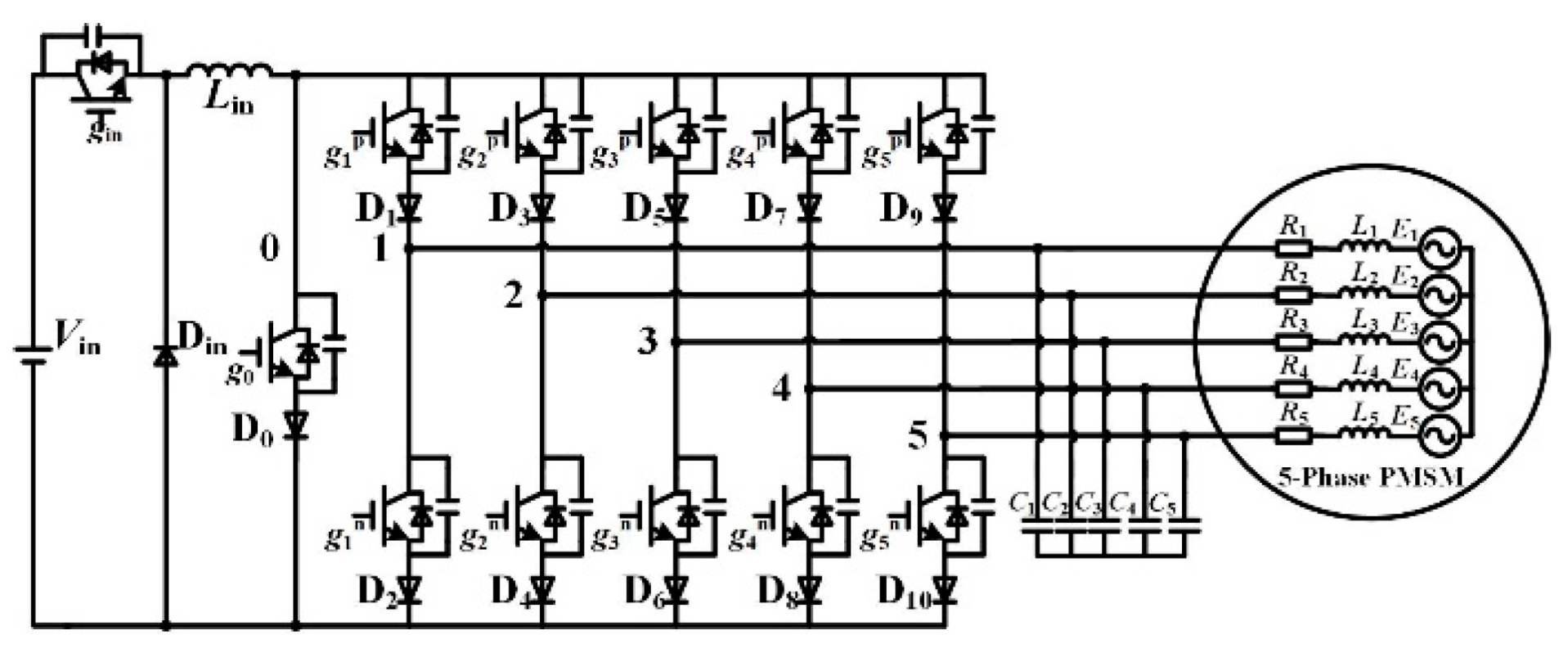
2. Impulse Current PWM Technique
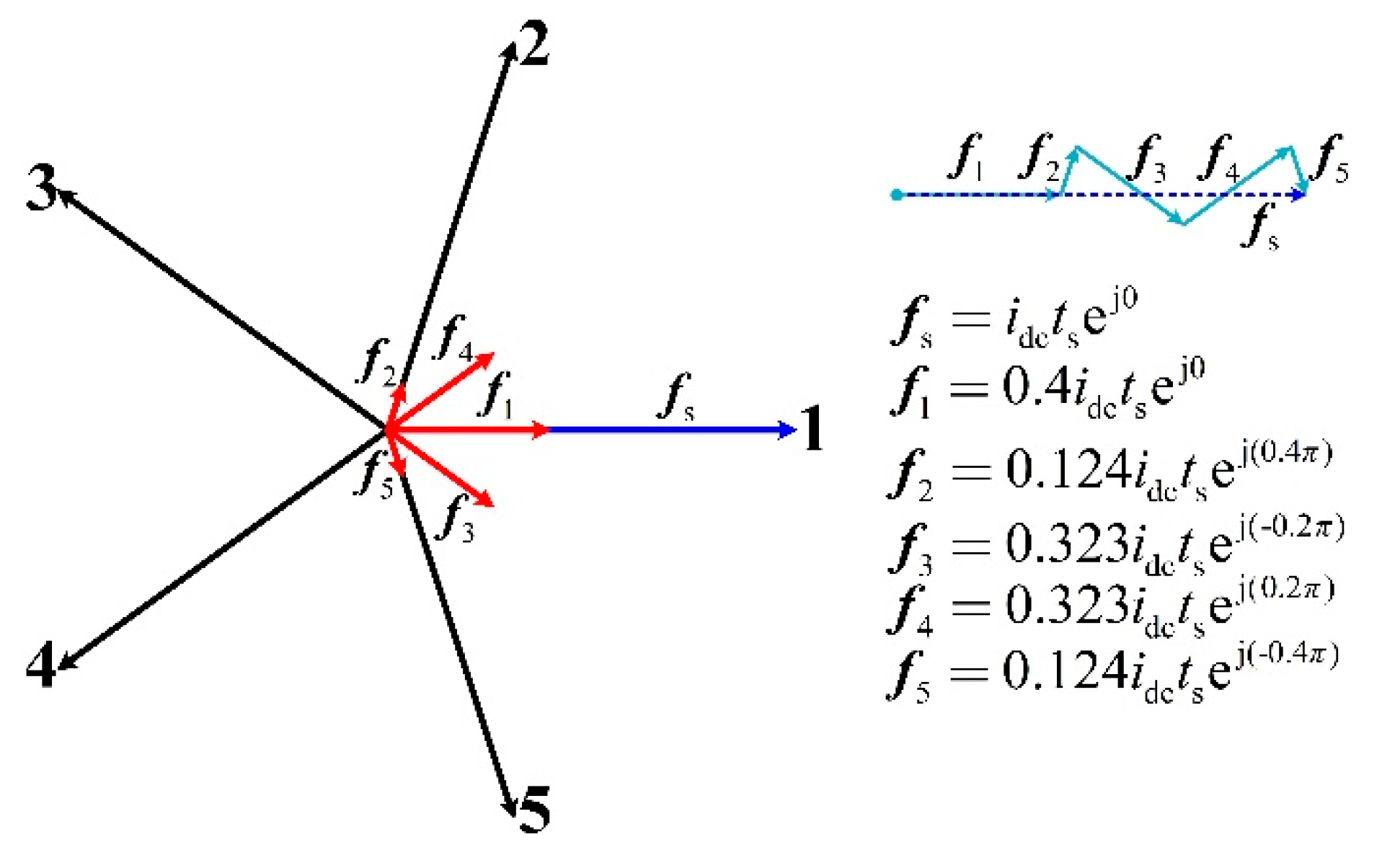
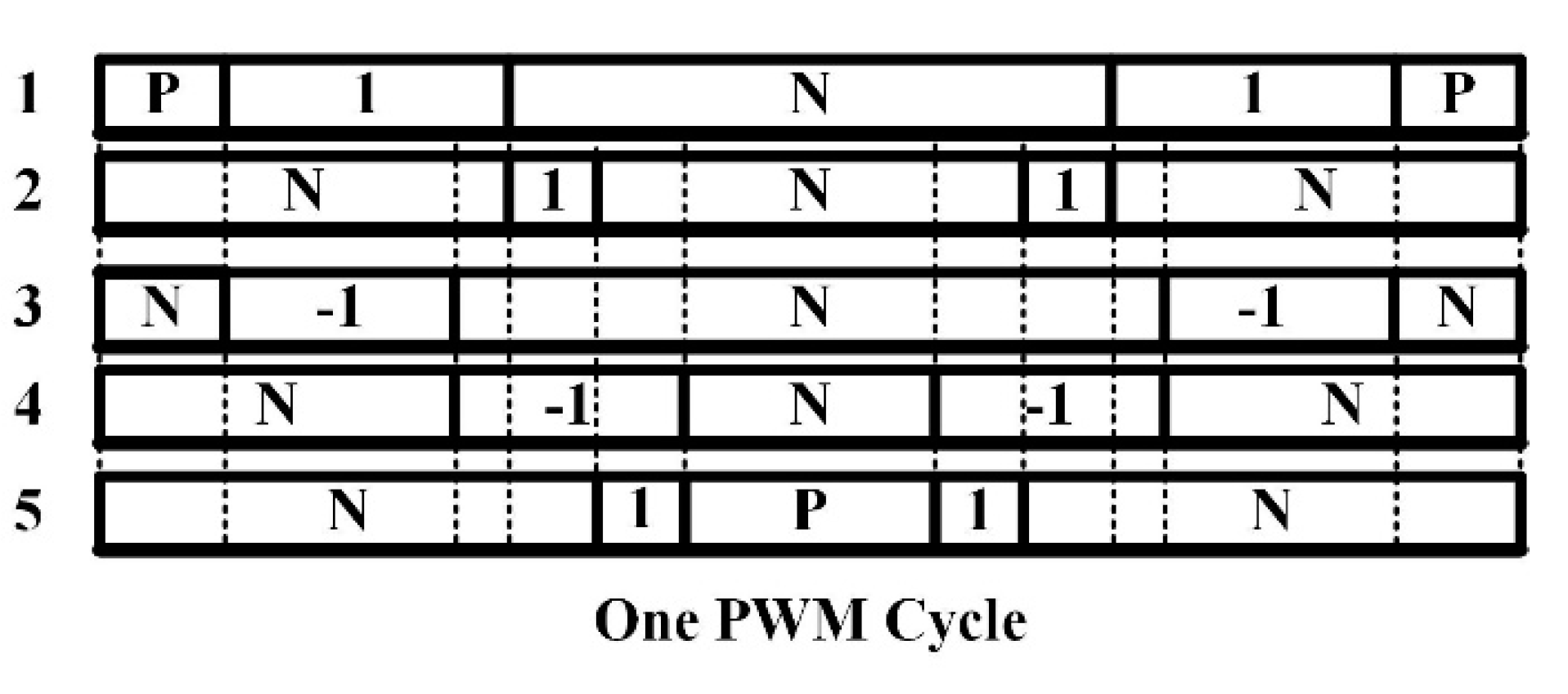
2.1. Mathematical Model of the Impulse Current PWM Technique
2.2. The DC-Link Current Ratio with a Five-Phase Motor Drive System
3. Harmonic Suppression Method for the nth Harmonic Current
3.1. The Analysis of the nth Harmonic Current in the mth Harmonic Space
- When n ∈ {x|x = 5k − m, k ∈ Z};
- 2.
- When n ∈ {x|x = 5k + m, k ∈ Z};
- 3.
- When n ∉ {x|x = 5k ± m, k ∉ Z};
- 4.
- When n ∈ {x|x = 5k − m, k ∈ Z};
- 5.
- When n ∈ {x|x = 5k + m, k ∈ Z};
- 6.
- When n ∉ {x|x = 5k ± m, k ∉ Z};
3.2. Low-Pass Filter SDFT-LPF Based on the Sliding Discrete Fourier Transformation
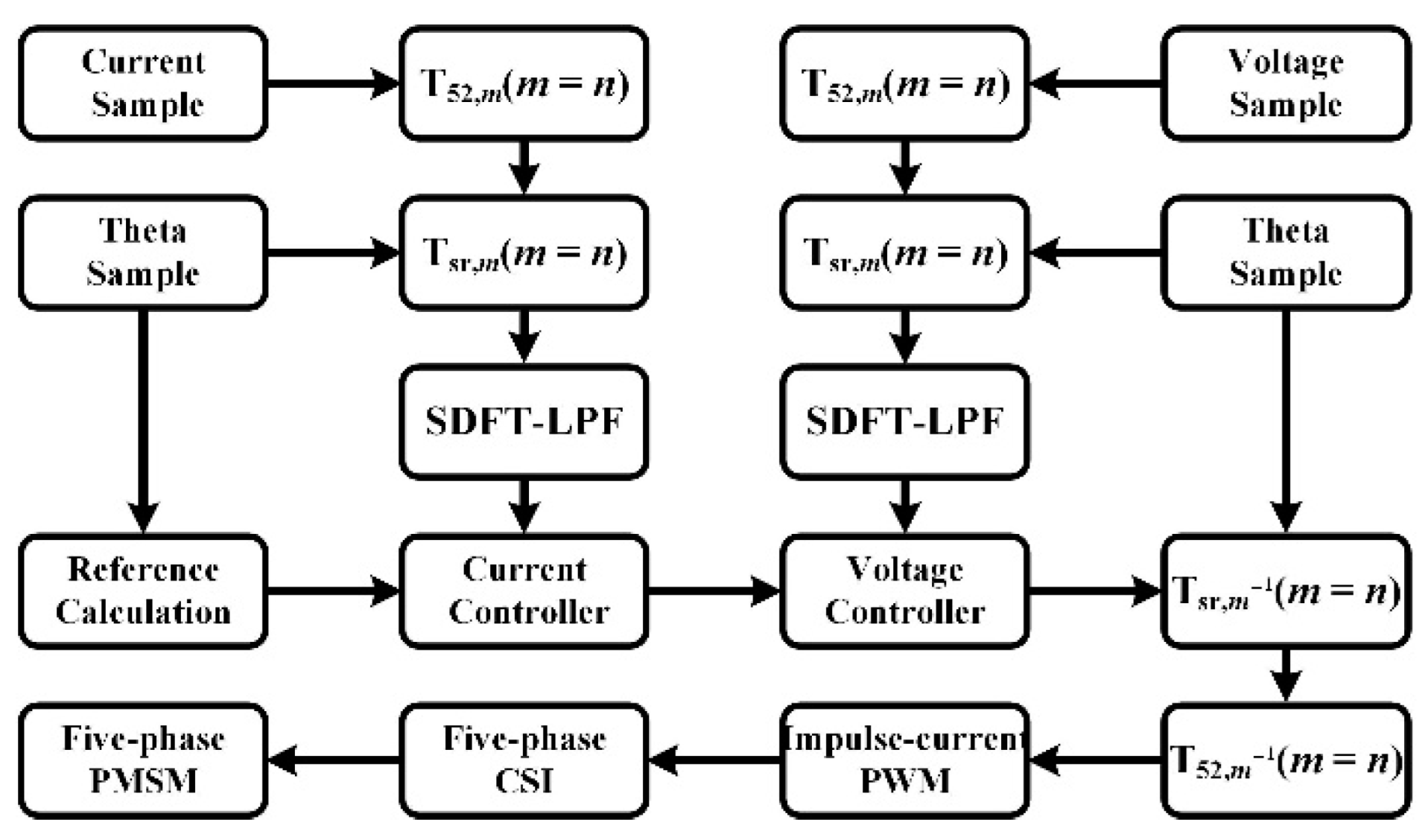
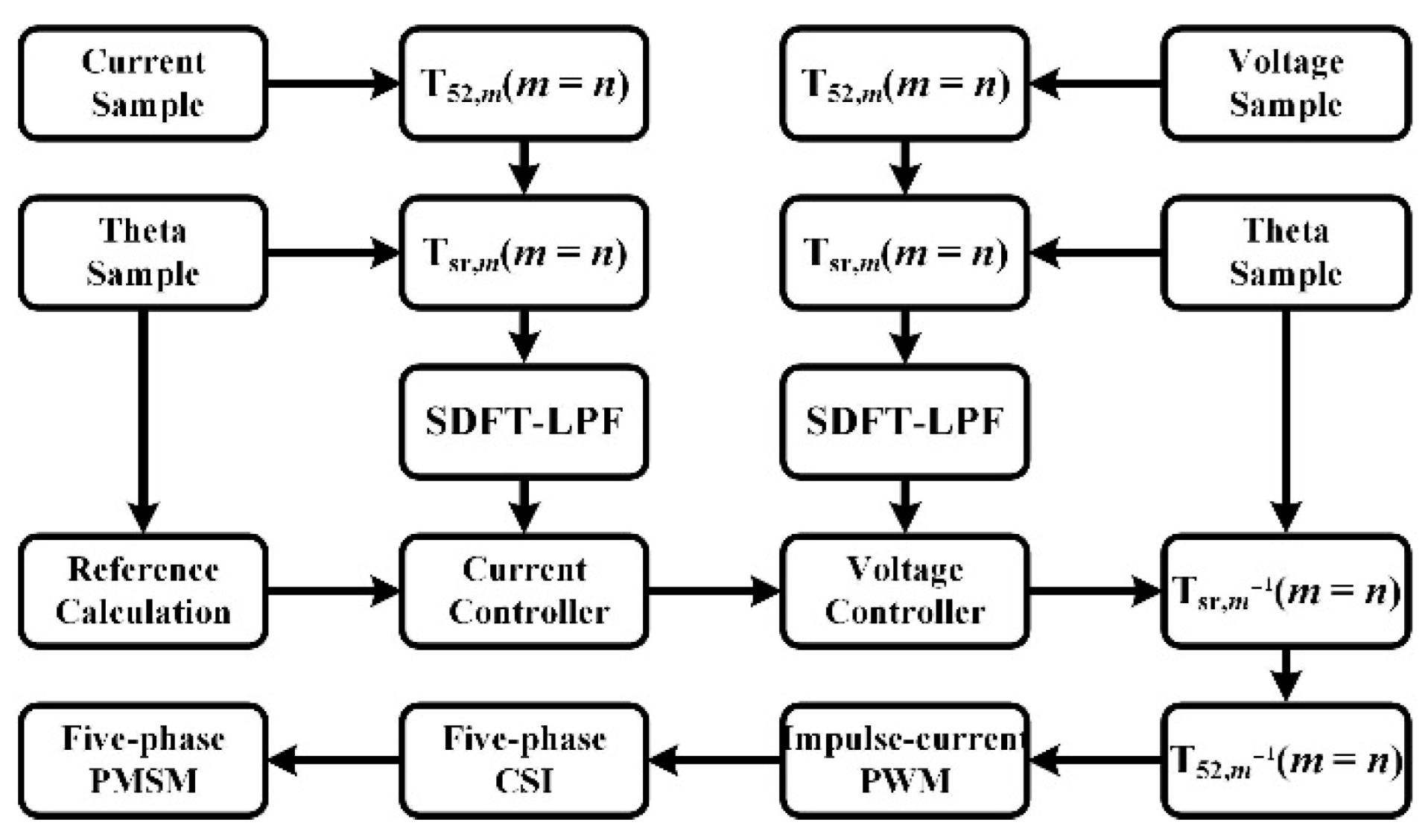
3.3. nth Harmonic Current Suppression Method
4. Experimental Results and Discussions
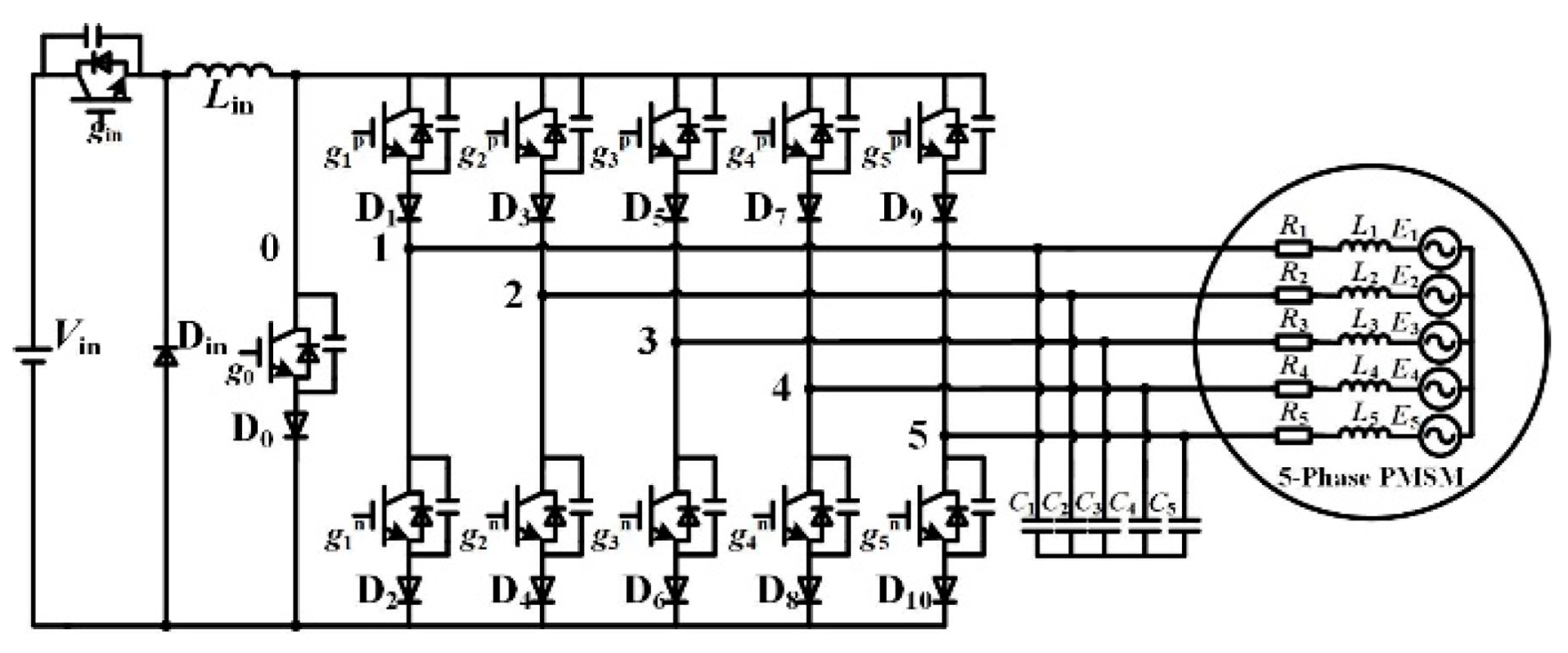
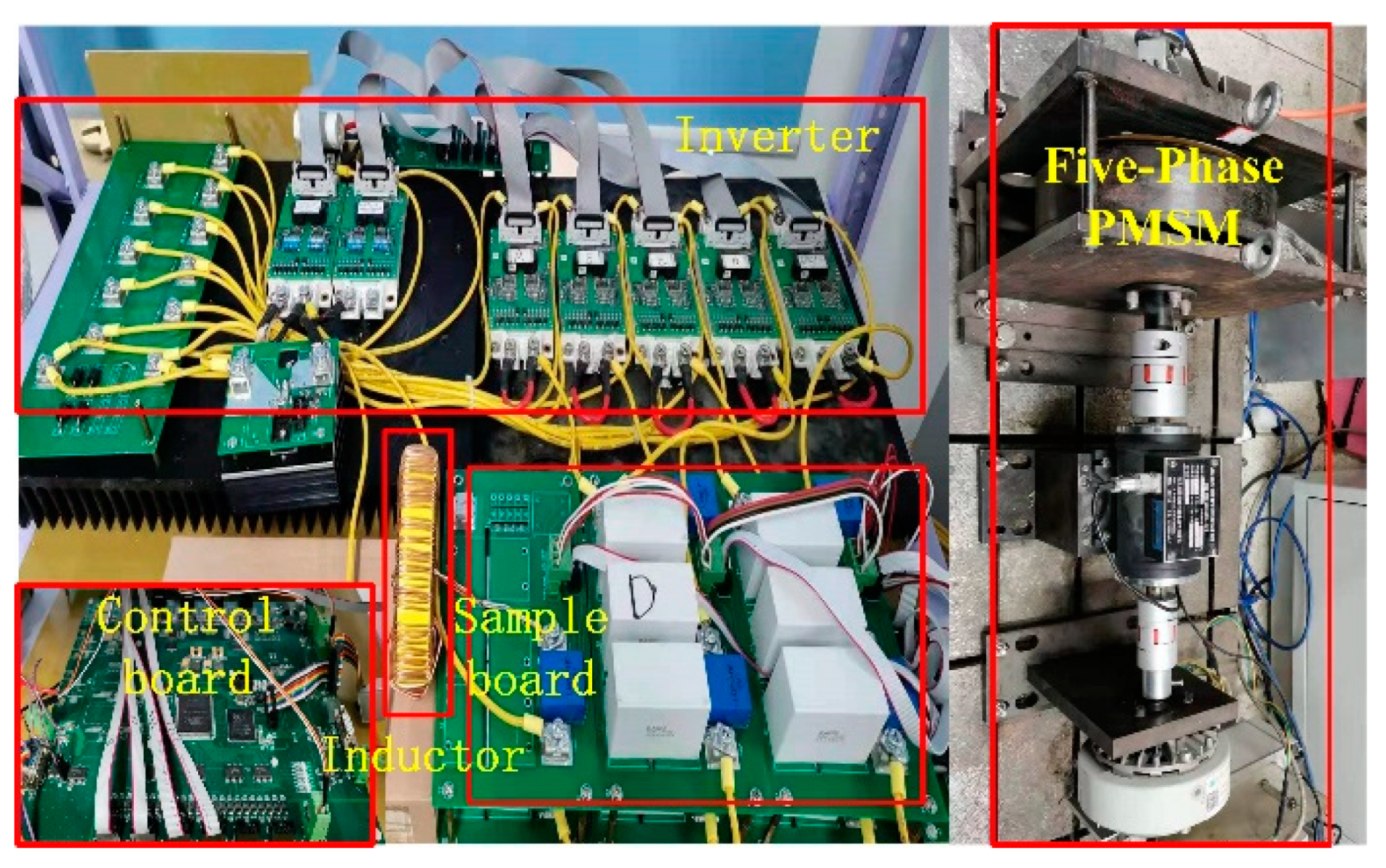
4.1. Experimental Prototype
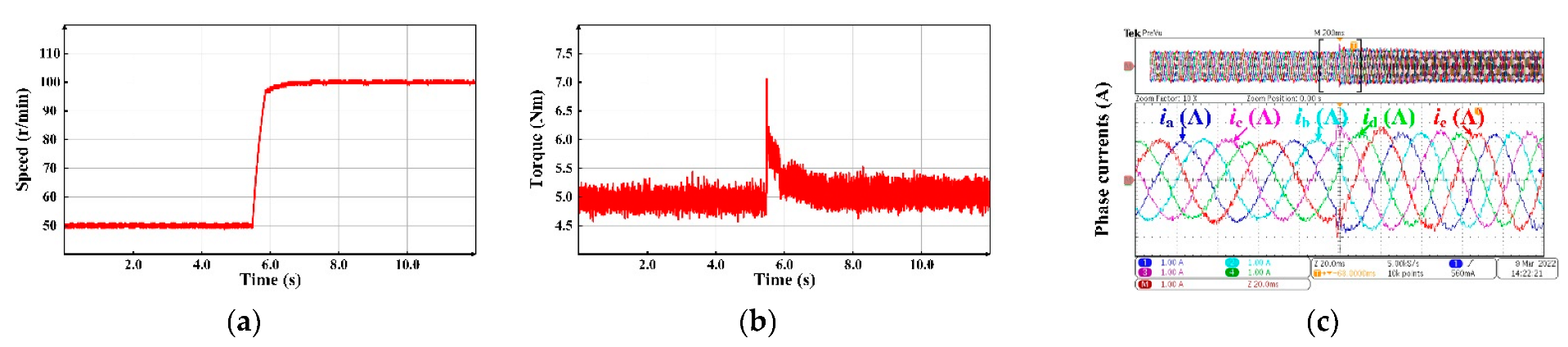
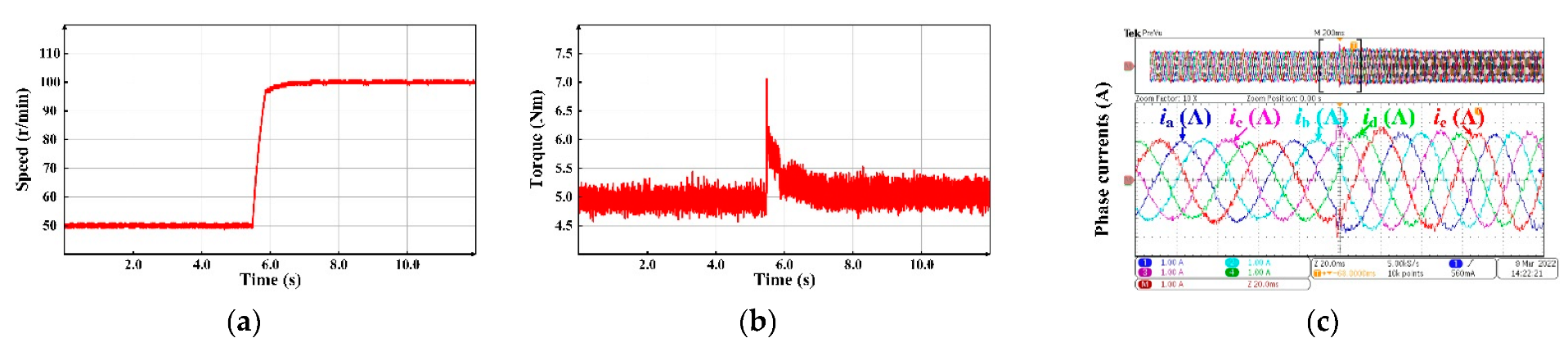
4.2. Normal Operation
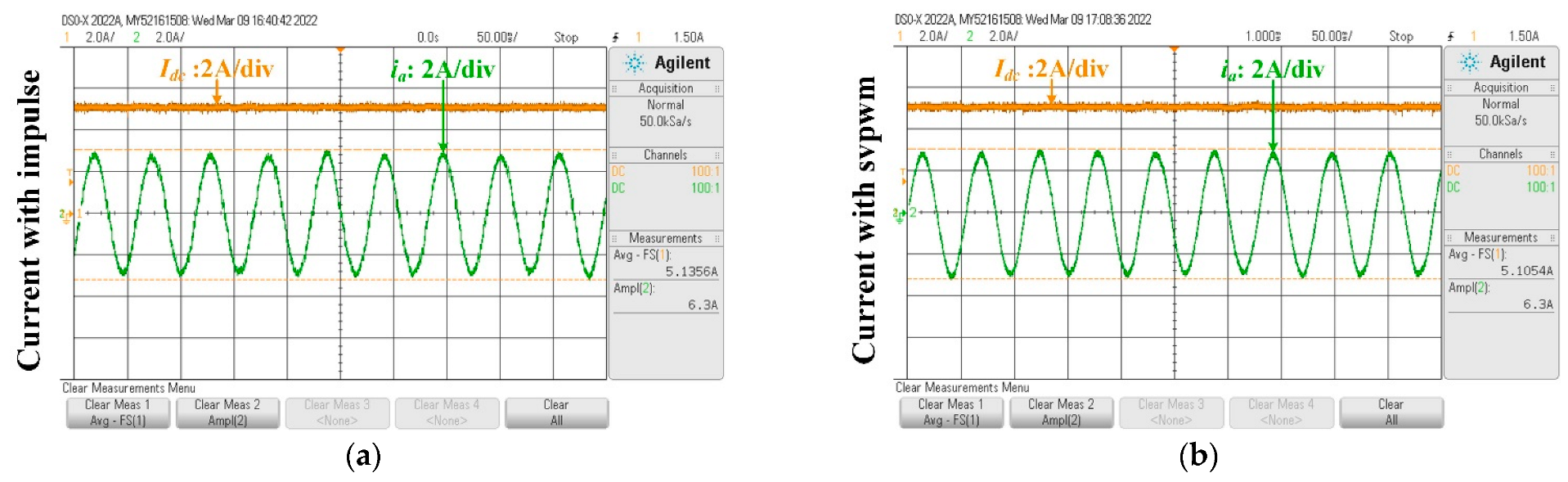
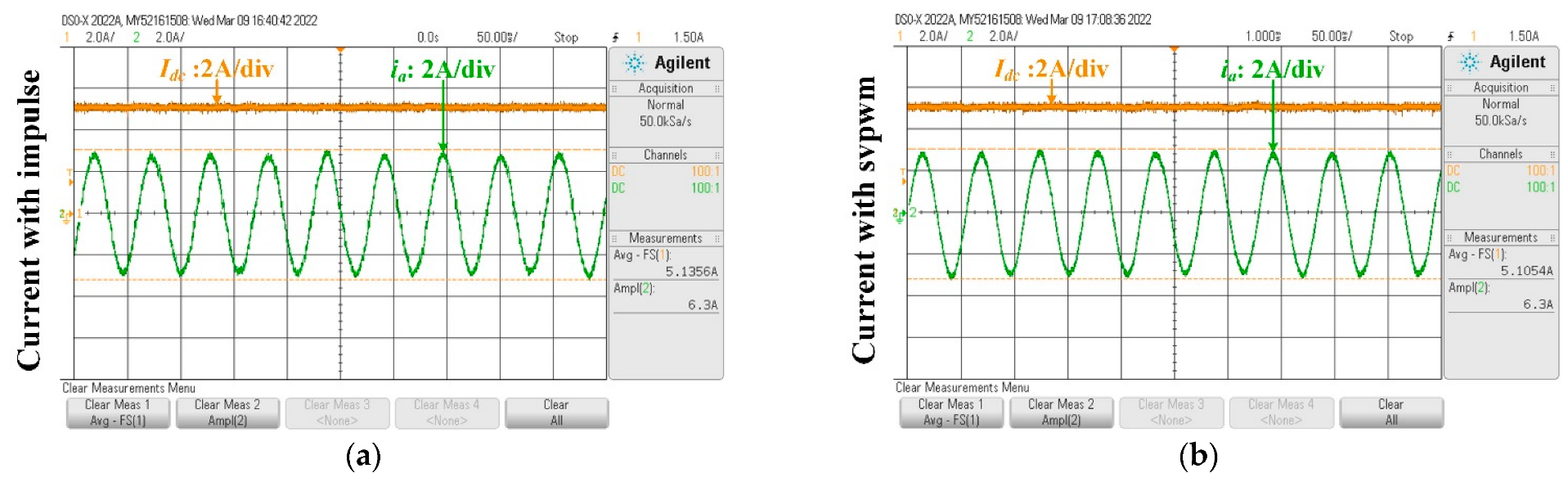
4.3. The DC-Link Current Ratio Experiment
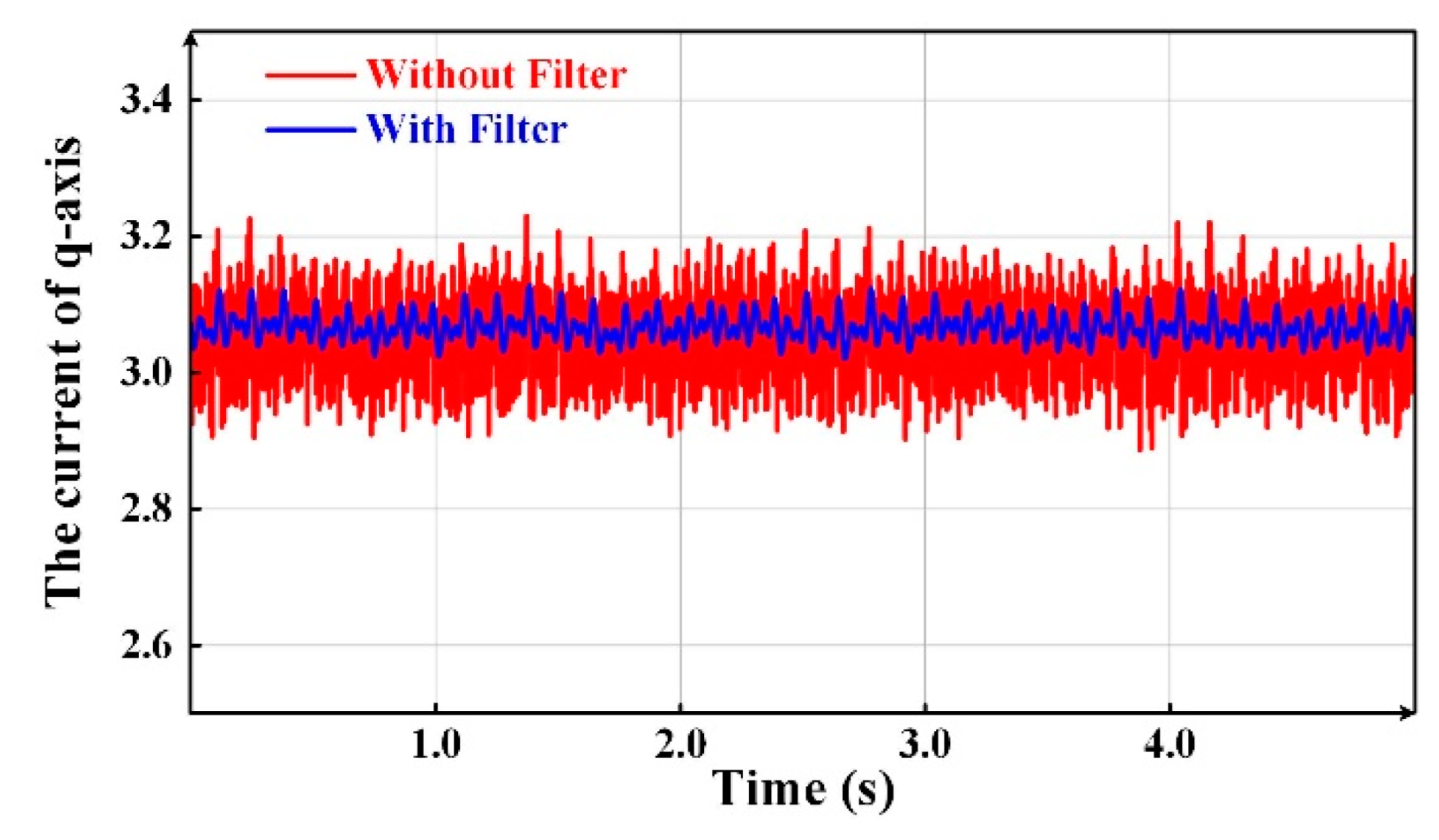
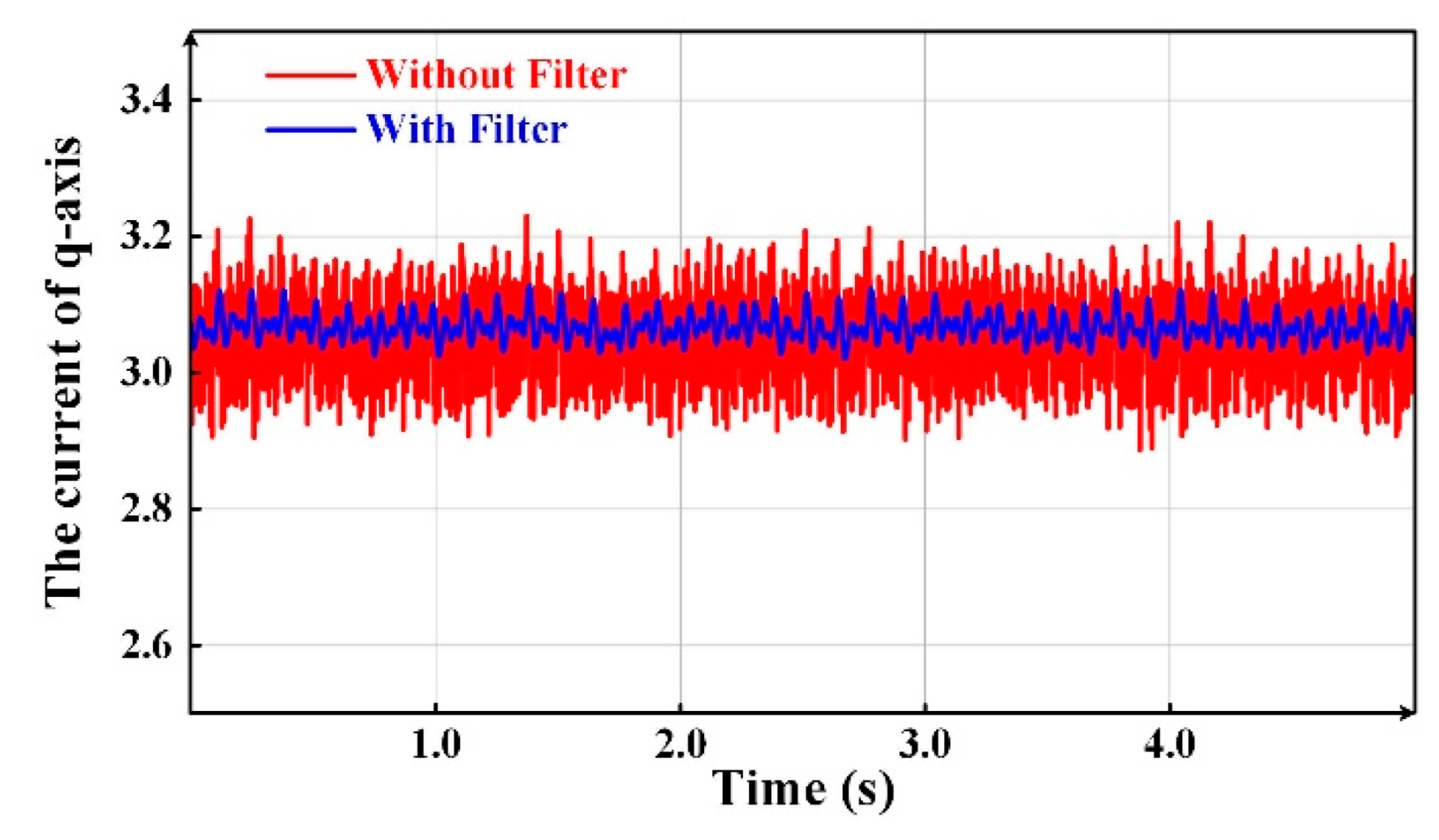
4.4. The Experiment with SDFT-LPF
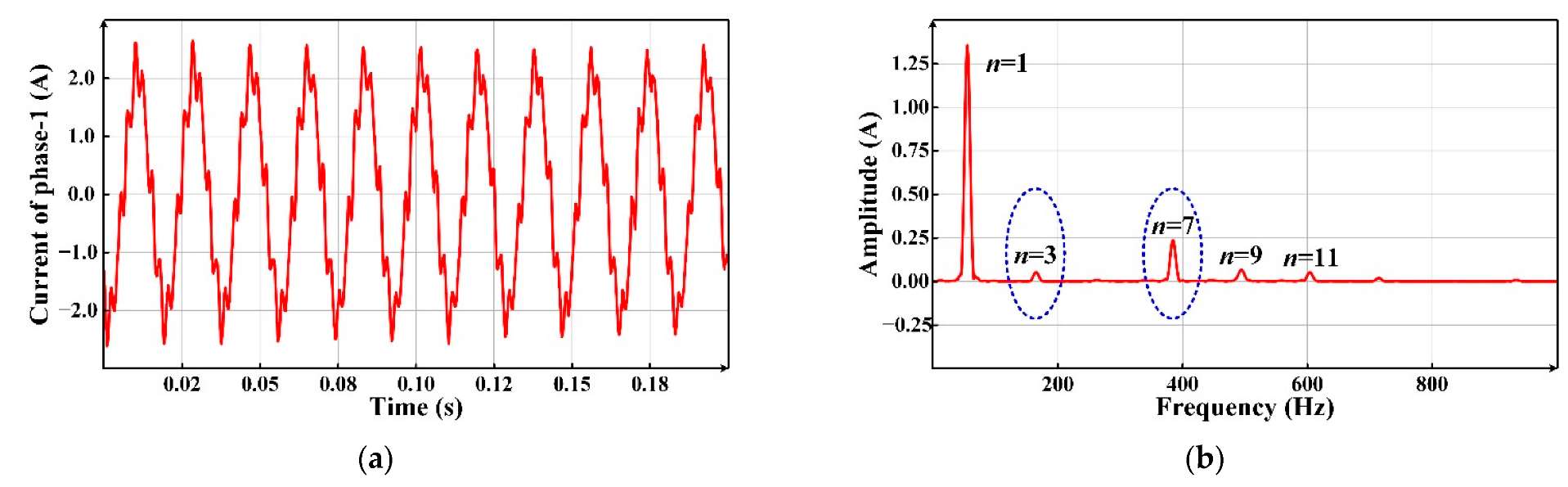
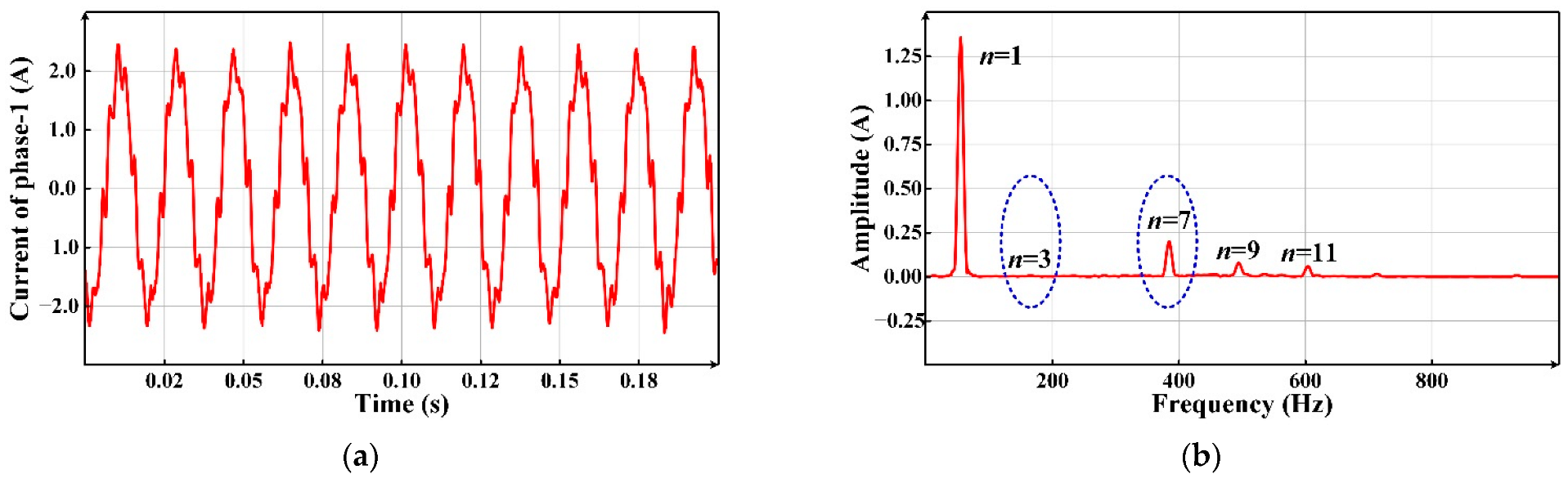
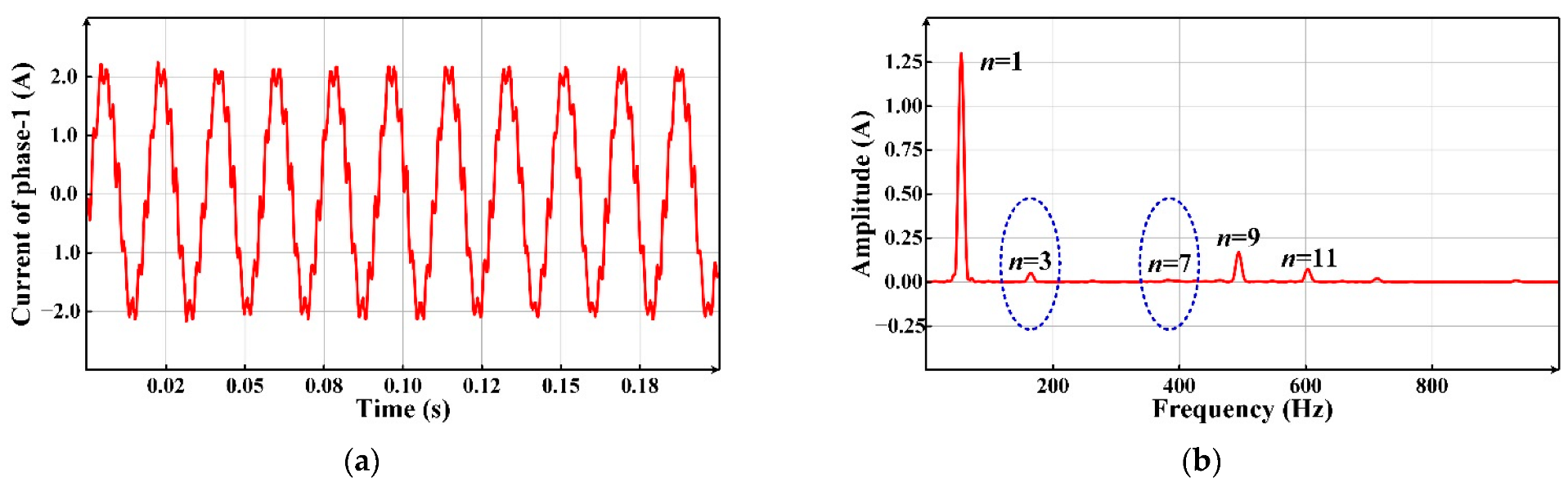
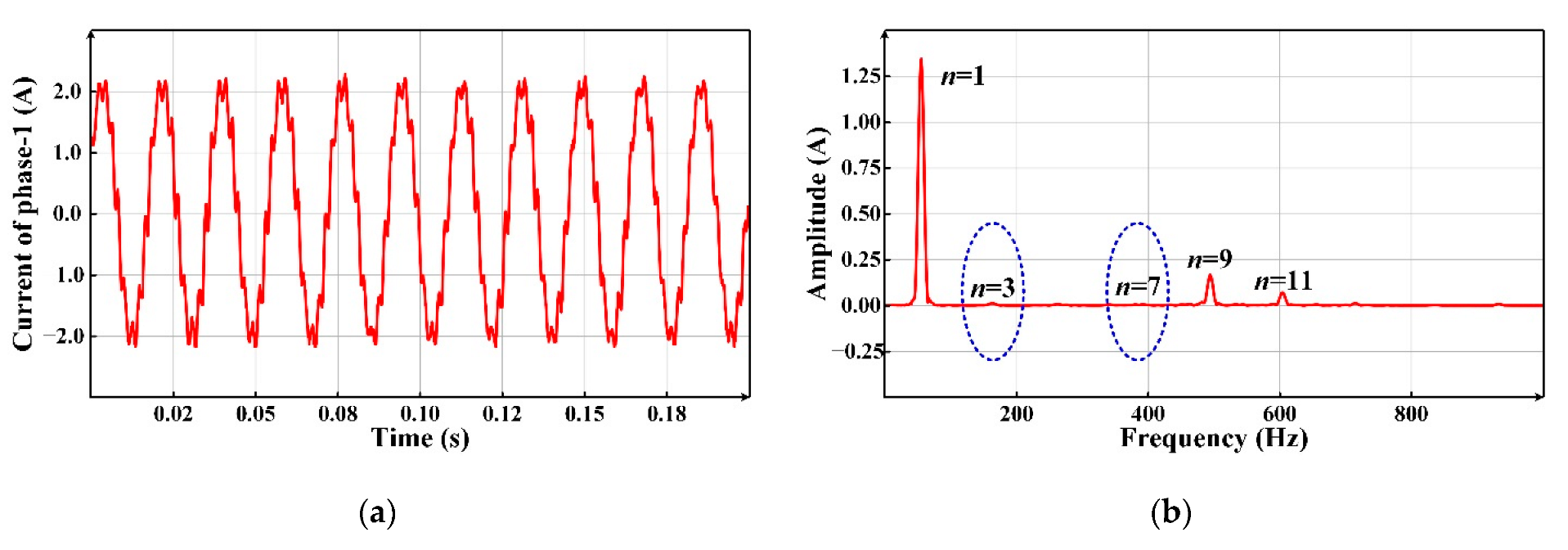
4.5. Harmonic Current Suppression Experiment
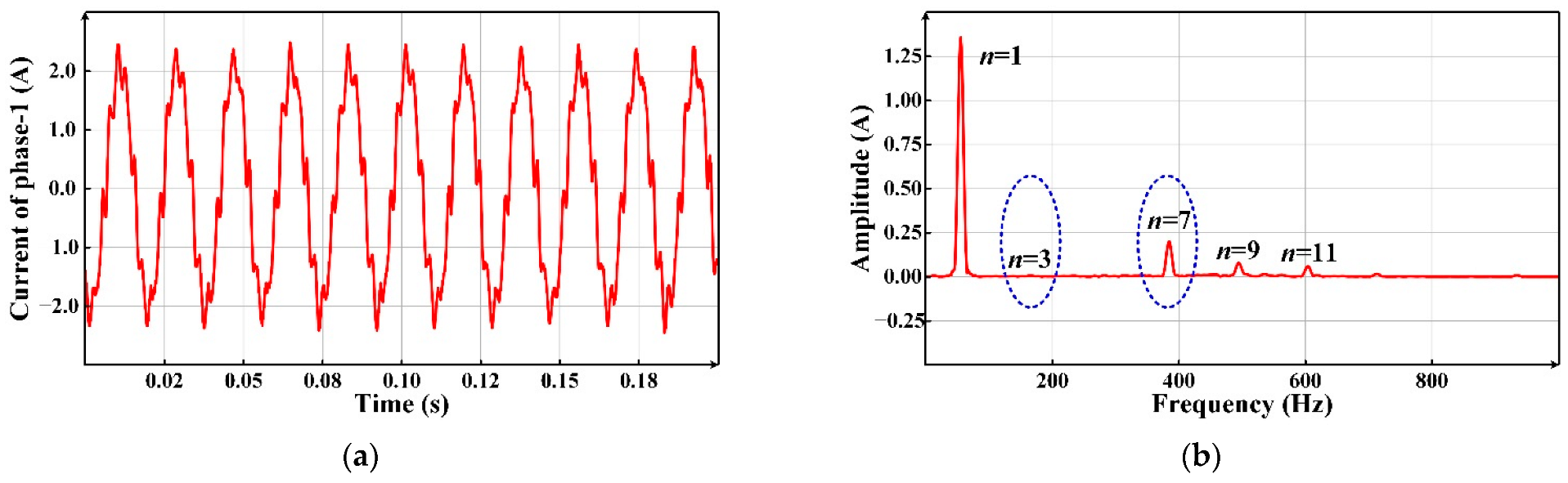
- The fundamental current control experiment;
- The fundamental current and third harmonic current control experiment simultaneously;
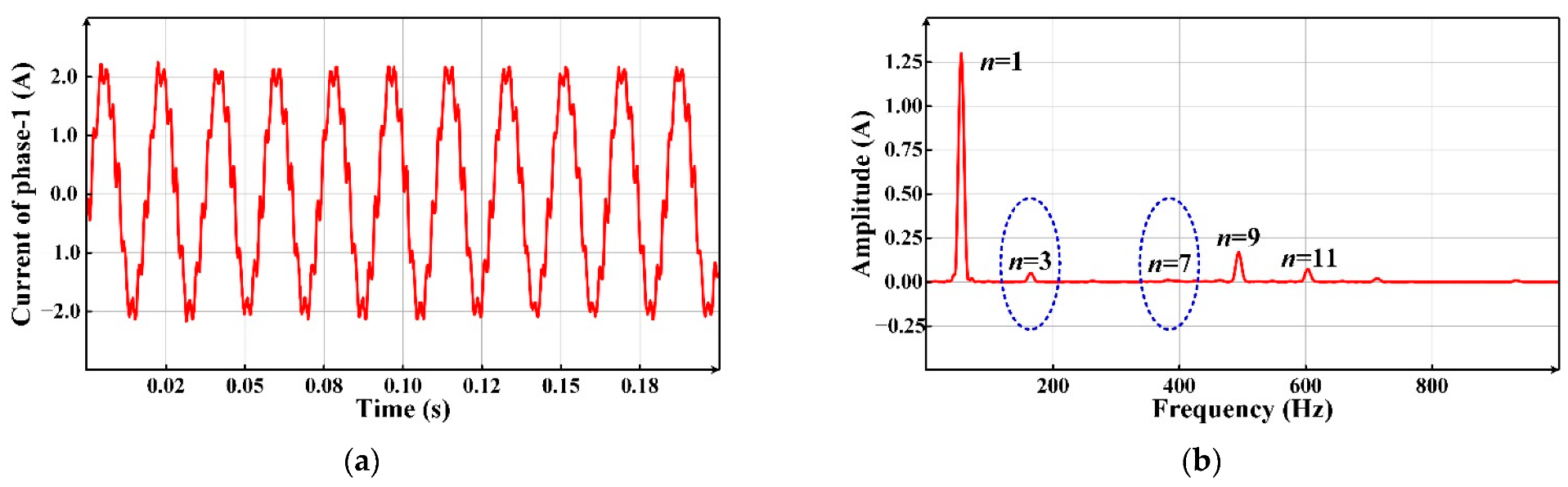
- The fundamental current and seventh harmonic current control experiment simultaneously;
- The fundamental current, third harmonic current, and seventh harmonic current control experiments simultaneously.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qu, L.; Qiao, W.; Qu, L. An extended-state-observer-based sliding-mode speed control for permanent-magnet synchronous motors. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 1605–1613. [Google Scholar] [CrossRef]
- Xu, W.; Junejo, A.K.; Liu, Y.; Islam, M.R. Improved continuous fast terminal sliding mode control with extended state observer for speed regulation of PMSM drive system. IEEE Trans. Veh. Technol. 2019, 68, 10465–10476. [Google Scholar] [CrossRef]
- Tan, L.N.; Cong, T.P.; Cong, D.P. Neural network observers and sensorless robust optimal control for partially unknown PMSM with disturbances and saturating voltages. IEEE Trans. Power Electron. 2021, 36, 12045–12056. [Google Scholar] [CrossRef]
- Kim, S.; Ahn, C.K. Offset-free proportional-type self-tuning speed controller for permanent magnet synchronous motors. IEEE Trans. Ind. Electron. 2019, 66, 7168–7176. [Google Scholar] [CrossRef]
- Mori, H.; Matsui, K.; Kondo, K.; Yamamoto, I.; Hasegawa, M. Parallel-connected five-level PWM inverters. IEEE Trans. Power Electron. 2003, 18, 173–179. [Google Scholar] [CrossRef]
- Maia, A.C.N.; Jacobina, C.B.; Freitas, N.B.; da Silva, I.R.F.M.P. Open-end multilevel six-phase machine drive system with five three-leg converters. IEEE Trans. Ind. Appl. 2017, 53, 2271–2281. [Google Scholar] [CrossRef]
- Bourhichi, S.E.; Oukassi, A.; el Adnani, M. Indirect vector control of induction motor using a five-level cascaded H-bridge inverter. In Proceedings of the 2018 International Symposium on Advanced Electrical and Communication Technologies (ISAECT), Rabat, Morocco, 21–23 November 2018. [Google Scholar]
- Rakesh, R.; Majumder, M.G.; Gopakumar, K.; Umanand, L.; Cecati, C.; Zielinski, D. A dense multilevel 30-sided space vector generation using a single DC link for an induction motor drive. IEEE Trans. Power Electron. 2021, 36, 11681–11690. [Google Scholar]
- Rakesh, R.; Majumder, M.G.; Dewani, R.; Gopakumar, K.; Loganathan, U.; Jarzyna, W.; Franquelo, L.G. A very high resolution 30-sided space vector generation from a single DC-link for induction motor drives. IEEE Trans. Ind. Electron. 2022, 69, 160–168. [Google Scholar]
- Fernandez, L.D.P.; Rodriguez, J.L.D.; Carvajal, M.A.J. Three-phase multilevel inverter with selective harmonic elimination. In Proceedings of the 2015 Workshop on Engineering Applications—International Congress on Engineering (WEA), Bogota, Colombia, 28–30 October 2015. [Google Scholar]
- Abrishamifar, A.; Arasteh, M.; Golshan, F. A novel method for real-time selective harmonic elimination in five-level converters. In Proceedings of the 2016 7th Power Electronics and Drive Systems Technologies Conference (PEDSTC), Tehran, Iran, 16–18 February 2016. [Google Scholar]
- Castiglia, V.; Miceli, R.; Schettino, G.; Cimoroni, M.G.; Buccella, C.; Cecati, C. Selective harmonic elimination in a 5-level single phase converter with FPGA based controller. In Proceedings of the 2018 5th International Symposium on Environment-Friendly Energies and Applications (EFEA), Rome, Italy, 24–26 September 2018. [Google Scholar]
- Yu, F.; Zhang, X.; Wang, S. Five-phase permanent magnet synchronous motor vector control based on harmonic eliminating space vector modulation. In Proceedings of the 2005 International Conference on Electrical Machines and Systems, Nanjing, China, 27–29 September 2005. [Google Scholar]
- Kaarthik, R.S.; Gopakumar, K.; Cecati, C.; Nagy, I. Timing calculations for a general N-level dodecagonal space vector structure using only reference phase voltages. IEEE Trans. Ind. Electron. 2016, 63, 1395–1403. [Google Scholar] [CrossRef]
- Booin, M.B.; Cheraghi, M. THD minimization in a five-phase five-level VSI using a novel SVPWM technique. In Proceedings of the 2019 10th International Power Electronics, Drive Systems and Technologies Conference (PEDSTC), Shiraz, Iran, 12–14 February 2019. [Google Scholar]
- Heidari, H.; Rassõlkin, A.; Vaimann, T.; Kallaste, A.; Taheri, A.; Holakooie, M.H.; Belahcen, A. A novel vector control strategy for a six-phase induction motor with low torque ripples and harmonic currents. Energies 2019, 12, 112. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Yang, J. A direct torque control strategy of five-phase induction motor with duty cycle optimization. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014. [Google Scholar]
- Payami, S.; Behera, R.K. An improved DTC technique for low-speed operation of a five-phase induction motor. IEEE Trans. Ind. Electron. 2017, 64, 3513–3523. [Google Scholar] [CrossRef]
- Pandit, J.K.; Aware, M.V.; Nemade, R.V.; Levi, E. Direct torque control scheme for a six-phase induction motor with reduced torque ripple. IEEE Trans. Power Electron. 2017, 32, 7118–7129. [Google Scholar] [CrossRef] [Green Version]
- Tatte, Y.N.; Aware, M.V. Torque ripple and harmonic current reduction in a three-level inverter-fed direct-torque-controlled five-phase induction motor. IEEE Trans. Ind. Electron. 2017, 64, 5265–5275. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, J.; Chen, C.; Tian, X.; Liu, G. Disturbance-observer-based direct torque control of five-phase permanent magnet motor under open-circuit and short-circuit faults. IEEE Trans. Ind. Electron. 2021, 68, 11907–11917. [Google Scholar] [CrossRef]
- Huang, W.; Hua, W.; Chen, F.; Hu, M.; Zhu, J. Model predictive torque control with SVM for five-phase PMSM under open-circuit fault condition. IEEE Trans. Power Electron. 2020, 35, 5531–5540. [Google Scholar] [CrossRef]
- Guo, Y.; Yu, B.; Li, S.; Zhu, Y.; Song, W. A FCS-MPC method based on simplified control set for five-phase PMSMs. In Proceedings of the 2021 IEEE International Conference on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Jinan, China, 20–22 November 2021. [Google Scholar]
- Liu, S.; Liu, C.; Song, Z.; Dong, Z.; Huang, Y. Candidate modulation patterns solution for five-phase PMSM drive system. IEEE Trans. Transp. Electrif. 2022, 8, 1194–1208. [Google Scholar] [CrossRef]
- Arafat, A.K.M.; Choi, S. Active current harmonic suppression for torque ripple minimization at open-phase faults in a five-phase PMa-SynRM. IEEE Trans. Ind. Electron. 2019, 66, 922–931. [Google Scholar] [CrossRef]
- Liu, H.; Wang, D.; Yi, X.; Meng, F. Torque ripple suppression under open-phase fault conditions in a five-phase induction motor with harmonic injection. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 274–288. [Google Scholar] [CrossRef]
- Pereira, L.A.; Scharlau, C.C.; Pereira, L.F.A.; Haffner, S. Influence of saturation on the airgap induction waveform of five-phase induction machines. IEEE Trans. Energy Convers. 2012, 27, 29–41. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, Z.; Liu, P.; He, J. A soft-switching current-source-inverter-fed motor drive with reduced common-mode voltage. IEEE Trans. Ind. Electron. 2021, 68, 3012–3021. [Google Scholar] [CrossRef]
- Chen, C.; Chen, Z.; Zhao, J.; Guo, Y.; Liao, X. An impulse modulation strategy for the M-phase permanent magnet synchronous motor with the current source inverter. In Proceedings of the 2022 International Conference on Power Energy Systems and Applications (ICoPESA), Singapore, 25–27 February 2022. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| Vin | Input voltage | 50 |
| Ldc-link | DC-link inductance | 13 mH |
| ts | Switching cycle | 120 μs |
| C | Capacitor of the filter | 90 μF |
| Symbol | Parameter | Value |
|---|---|---|
| P | No. of pole pairs | 22 |
| R | Winding resistance | 0.65 Ω |
| Ld | d-axis inductance | 0.689 mH |
| Lq | q-axis inductance | 0.689 mH |
| ω | Rated speed | 150 r/min |
| Te | Rated torque | 18 Nm |
| ψf | Rotor flux linkage | 0.072 Wb |
| J | Moment of inertia | 0.0625 kg‧m−2 |
| The Experiment and Harmonic Current Order | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| 1 | 1.356 A/100% | 1.358 A/100% | 1.300 A/100% | 1.345 A/100% |
| 3 | 0.053 A/3.9% | 0.007 A/0.5% | 0.051 A/3.9% | 0.012 A/0.9% |
| 7 | 0.237 A/17.5% | 0.200 A/14.7% | 0.011 A/0.8% | 0.004 A/0.3% |
| 9 | 0.067 A/4.9% | 0.077 A/5.7% | 0.161 A/12.4% | 0.162 A/12.0% |
| 11 | 0.052 A/3.8% | 0.058 A/4.3% | 0.068 A/5.2% | 0.070 A/5.2% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Chen, Z.; Gao, C.; Zhao, J.; Liu, X.; Sun, X. An nth Harmonic Current Suppression Method Based on the Impulse Current PWM Technique for a Multi-Phase Permanent Magnet Synchronous Motor Fed with a Current Source Inverter. Energies 2022, 15, 4394. https://doi.org/10.3390/en15124394
Chen C, Chen Z, Gao C, Zhao J, Liu X, Sun X. An nth Harmonic Current Suppression Method Based on the Impulse Current PWM Technique for a Multi-Phase Permanent Magnet Synchronous Motor Fed with a Current Source Inverter. Energies. 2022; 15(12):4394. https://doi.org/10.3390/en15124394
Chicago/Turabian StyleChen, Chao, Zhen Chen, Congzhe Gao, Jing Zhao, Xiangdong Liu, and Xiaoyong Sun. 2022. "An nth Harmonic Current Suppression Method Based on the Impulse Current PWM Technique for a Multi-Phase Permanent Magnet Synchronous Motor Fed with a Current Source Inverter" Energies 15, no. 12: 4394. https://doi.org/10.3390/en15124394
APA StyleChen, C., Chen, Z., Gao, C., Zhao, J., Liu, X., & Sun, X. (2022). An nth Harmonic Current Suppression Method Based on the Impulse Current PWM Technique for a Multi-Phase Permanent Magnet Synchronous Motor Fed with a Current Source Inverter. Energies, 15(12), 4394. https://doi.org/10.3390/en15124394