1. Introduction
With the rapid development of railroad construction, the safety of trains is receiving increasing attention. The traction motor (TM), usually an induction motor, is essential for the train traction system. Once a fault occurs in the TM, it puts the safety of train operations at risk. Stator interturn short-circuit fault (SISCF) is one of the main failures of the TM. Worse still, it can evolve into severe failures, for instance, the phase-to-phase short-circuit fault. Therefore, it is important to research SISCF diagnosis and prediction methods exhaustively.
Electrical and magnetic signals are the two main objects to research the diagnostic and prediction method of SISCF. A motor fault monitoring method was proposed in [
1], which depended on the diagonal elements of the negative sequence impedance matrix. It excluded the error of load, operating conditions, and measurements, but required offline parameters and additional equipment. Reference [
2] proposed a phasor compensation approach to detect minor interturn short-circuit faults. The study estimated the fault severity of voltage unbalance, sensor errors, and the motor’s asymmetry in structure. However, it was affected by load fluctuations and other asymmetries. In [
3], the second harmonic component in the q-axis current was analyzed to monitor the fault, which realized one-turn SISCF detection. However, it worked in steady state only. In [
4], the short-time Fourier transform (STFT) was utilized. It added windows to the stator currents and voltages to obtain an STFT spectrum that was used to perform fault diagnosis. However, the STFT cannot consider both time and frequency resolution because the windows cannot be changed once determined. In [
5], the slight interturn fault was detected by the proposed condition-monitoring systems based on the discrete wavelet transform (DWT). Although this method could be verified under different loads, there was a lack of experimental verification because it was mainly verified by simulation. In [
6], an asymmetric induction machine model-based diagnosis method was proposed, which could eliminate the effects of voltage imbalance and the motor’s inherent asymmetry. However, it is difficult to obtain accurate parameters from an operation motor since the parameters change with load conditions. In [
7], a novel approach was proposed based on high-frequency impedance, but it needed to capture both high-frequency phase voltages and currents. In [
8,
9,
10], the air gap magnetic field was monitored by observation coils arranged in the stator slot. When the SISCF occurs, the air gap magnetic field generates specific harmonics, which inducts corresponding electric potentials in the coils. Since this method is an invasive monitoring method, it is not suitable for the motors already in operation as well as the induction motor which typically has a narrow airgap. Machine learning has been widely applied to diagnose SISCF in recent years. Reference [
11] proposed a method to analyze the measured signals using the genetic algorithm. Graph-based semi-supervised learning was adopted in [
12] to realize online fault identification. In [
13], a convolutional neural network-based diagnosis method was employed to detect and classify the stator winding faults. However, these intelligence algorithms need a mass of data to train the model to achieve good results.
Identifying SISCF by electrical signals has good application value because it does not require additional sensors and causes no damage to the motor’s structure. The stator current is the most commonly used signal. Meanwhile, Park’s transform is an effective means to process the three-phase current. Refs. [
14,
15,
16] took the ratio of the dual-frequency component to the fundamental component in the Park vector (PV) as the fault feature. Still, it is not a good indicator of SISCF in the case of a minor fault and heavy load since the fundamental current increases with the load. In [
17], the triplet frequency current of phase current and PV’s shape were utilized. However, it took no consideration of the impact of load changes. In [
18], the wavelet coefficient which contains the component of 100 Hz was adopted to diagnose SISCF, for the reason that the coefficient amplitude increases when the fault occurs. In addition, Refs. [
16,
17] pointed out that the long and short axis of the Park vector trajectory (PVT) ellipse are correlated with the positive and negative sequence components of the stator current, respectively. Although the studies above have yielded some achievements by Park’s transformation, there are inevitable drawbacks to them which can be expressed as follows.
Sensor errors and zero drifts were not considered in the previous study. These deviations change the PVT and its modulus, which in turn aggravates the extraction of fault features.
The frequency of the motor is time-varying, which makes it challenging to obtain the exact double frequency component of the fundamental.
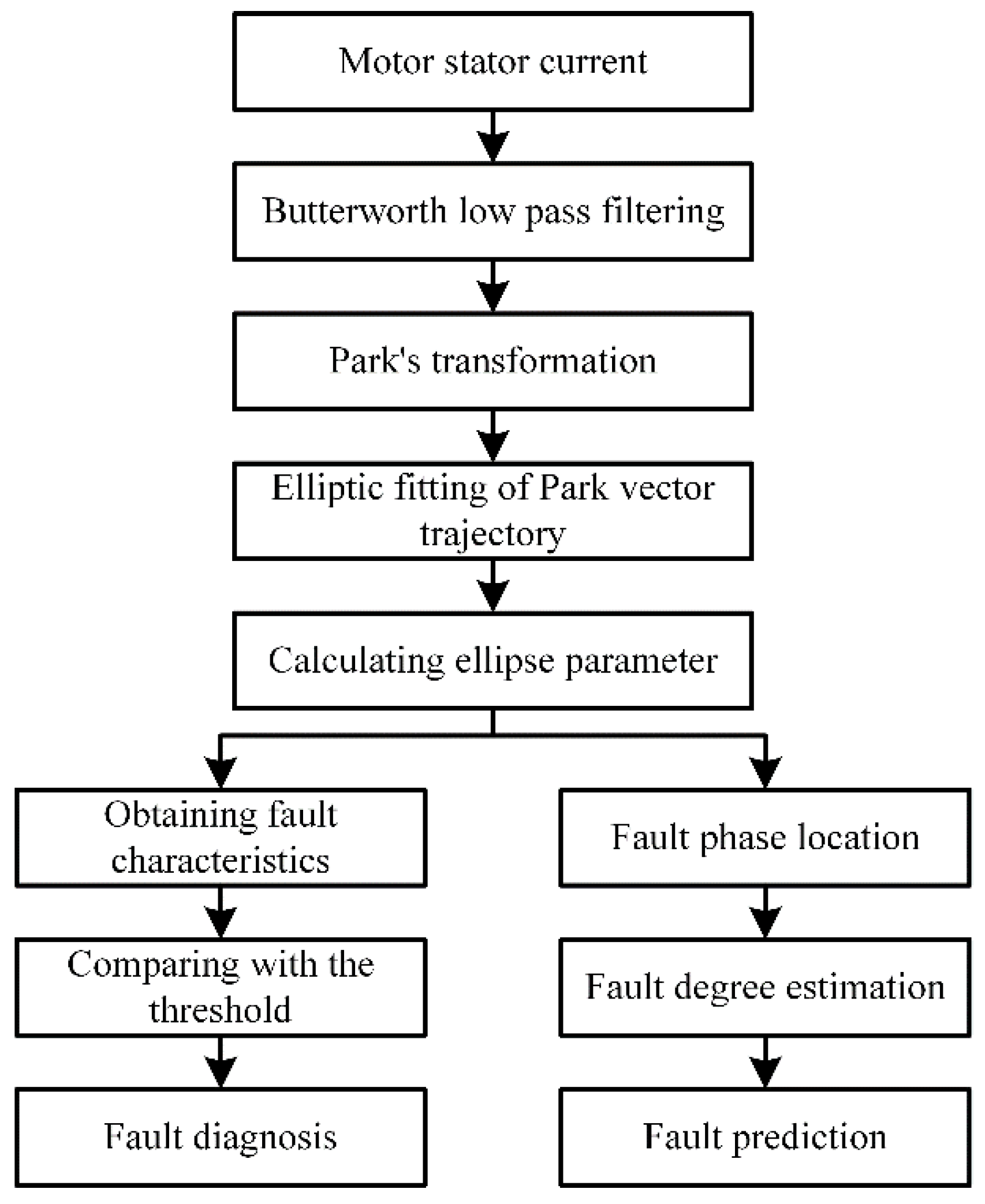
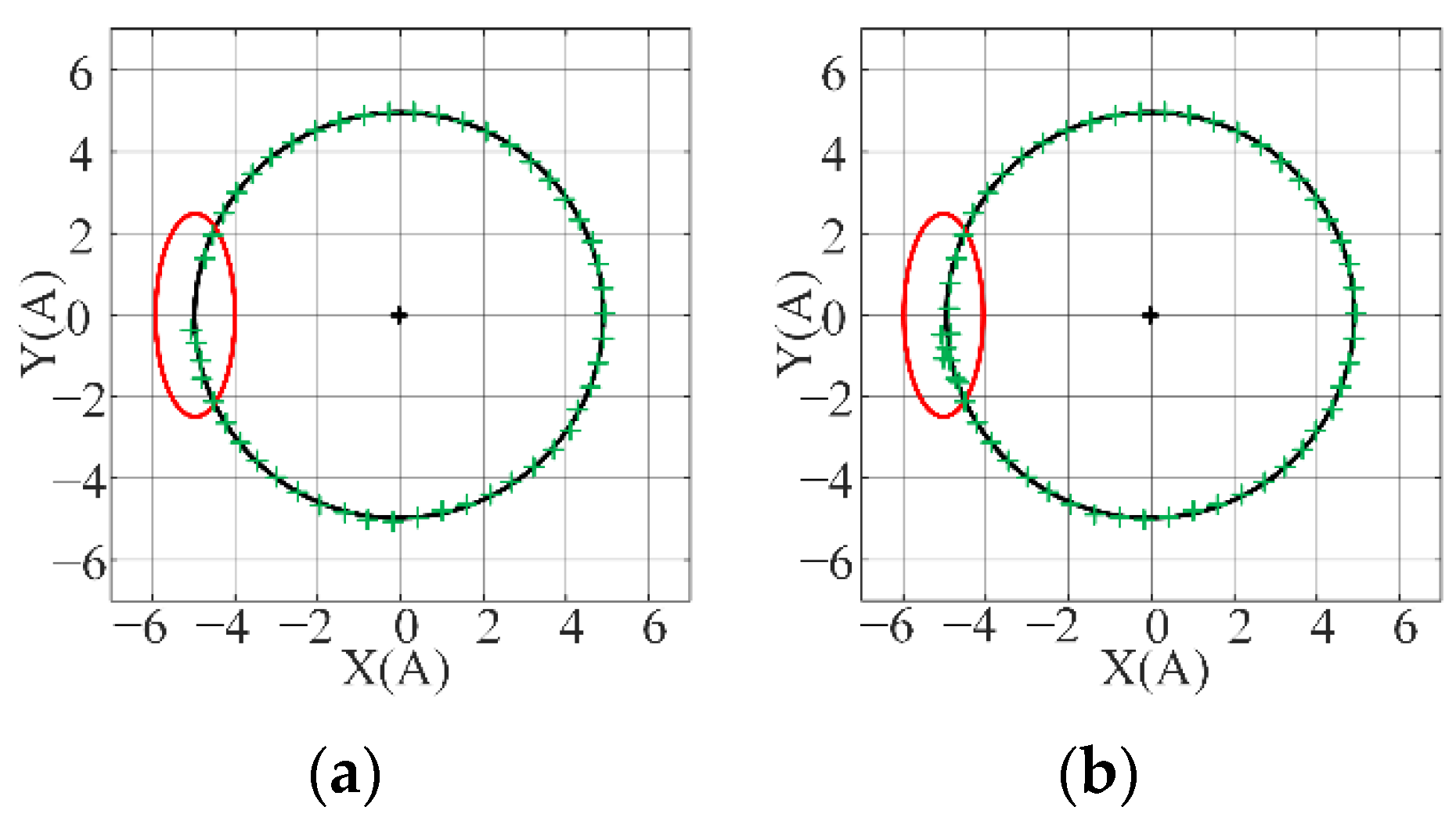
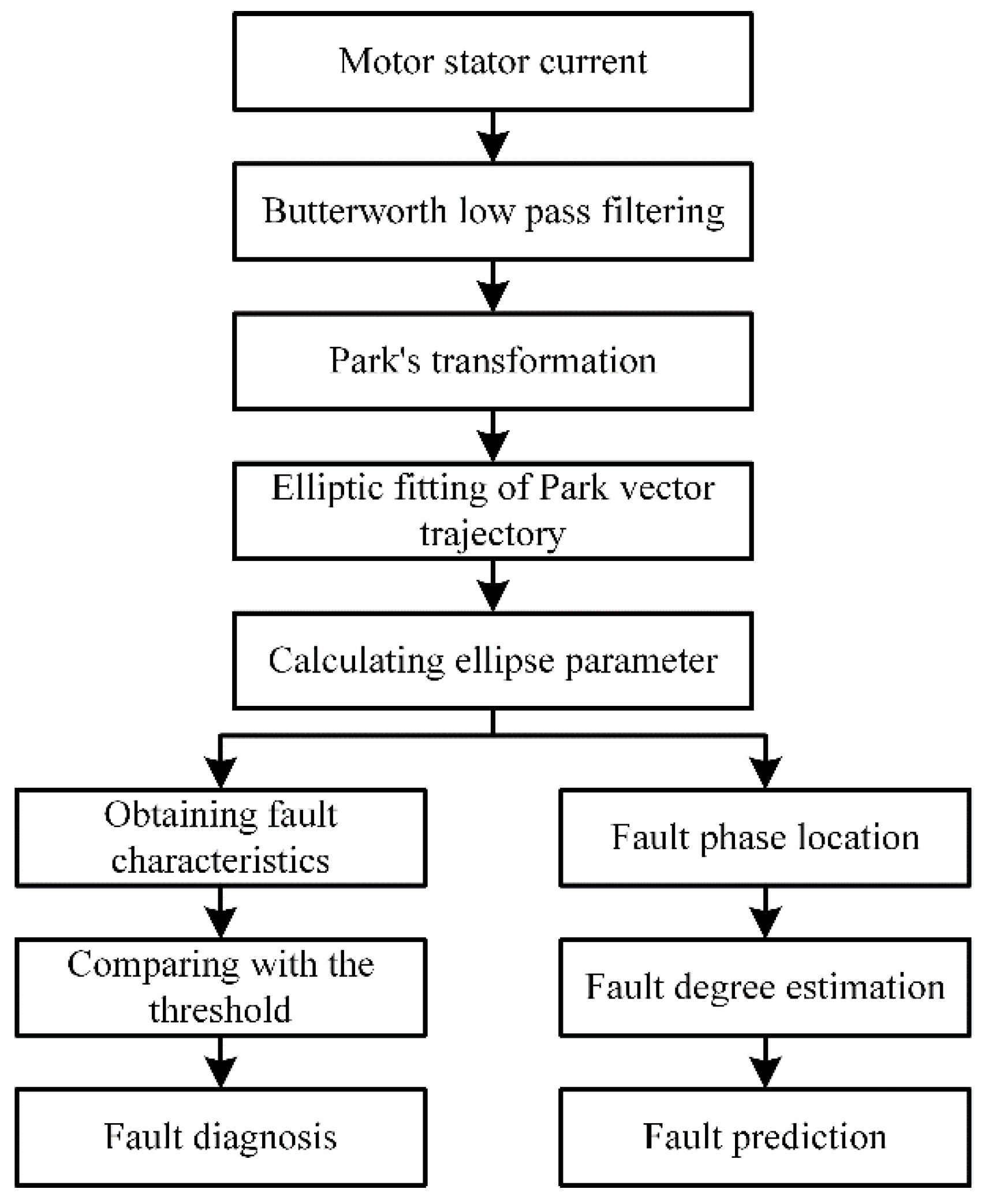
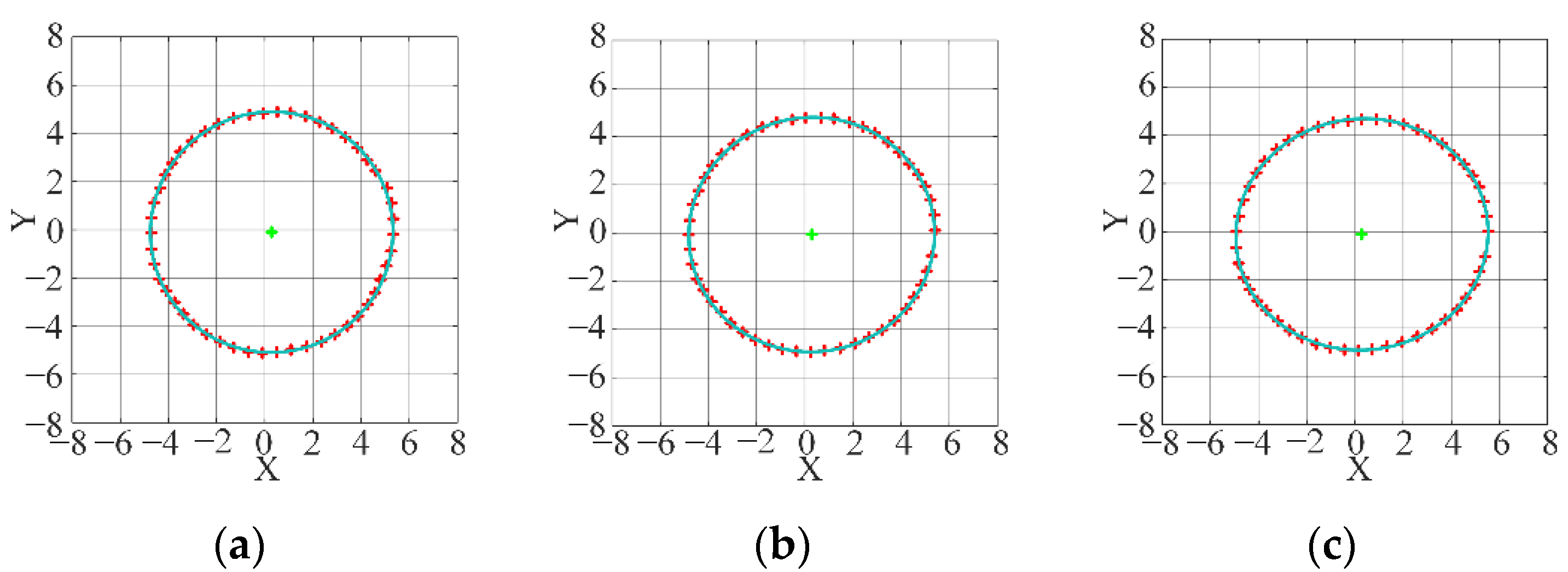
A new approach is proposed to diagnose and predict the SISCF by deriving the relationship between PVT’s ellipse parameters and the stator current’s sequence components. Specifically, Park’s transformation was performed on the stator current to obtain the PVT. Then, the PVT was fitted to the ellipse to obtain the semi-major axis, semi-minor axis, and long axis dip angle parameters. Based on the elliptic coefficient, the negative sequence current was calculated to diagnose the SISCF. Then, the negative current and long axis dip angle were applied in prediction. Finally, a simulation model and an experimental platform were built to verify the proposed method. The simulation results were consistent with the experimental results, indicating the correctness and effectiveness of the proposed technique.
This article is organized as follows.
Section 2 presents the fault characteristics of the TM with SISCF. In
Section 3, the theory and steps of the diagnosis and prediction method are introduced. In addition, the negative current is adopted to indicate the severity of SISCF and the long axis dip angle to the fault phase location.
Section 4 is the simulation analysis of the diagnostic and prediction approach, and
Section 5 shows the experimental verification. Finally, the conclusions of this paper are drawn in
Section 6.
2. Traction Motor Stator Interturn Short-Circuit Fault Characters
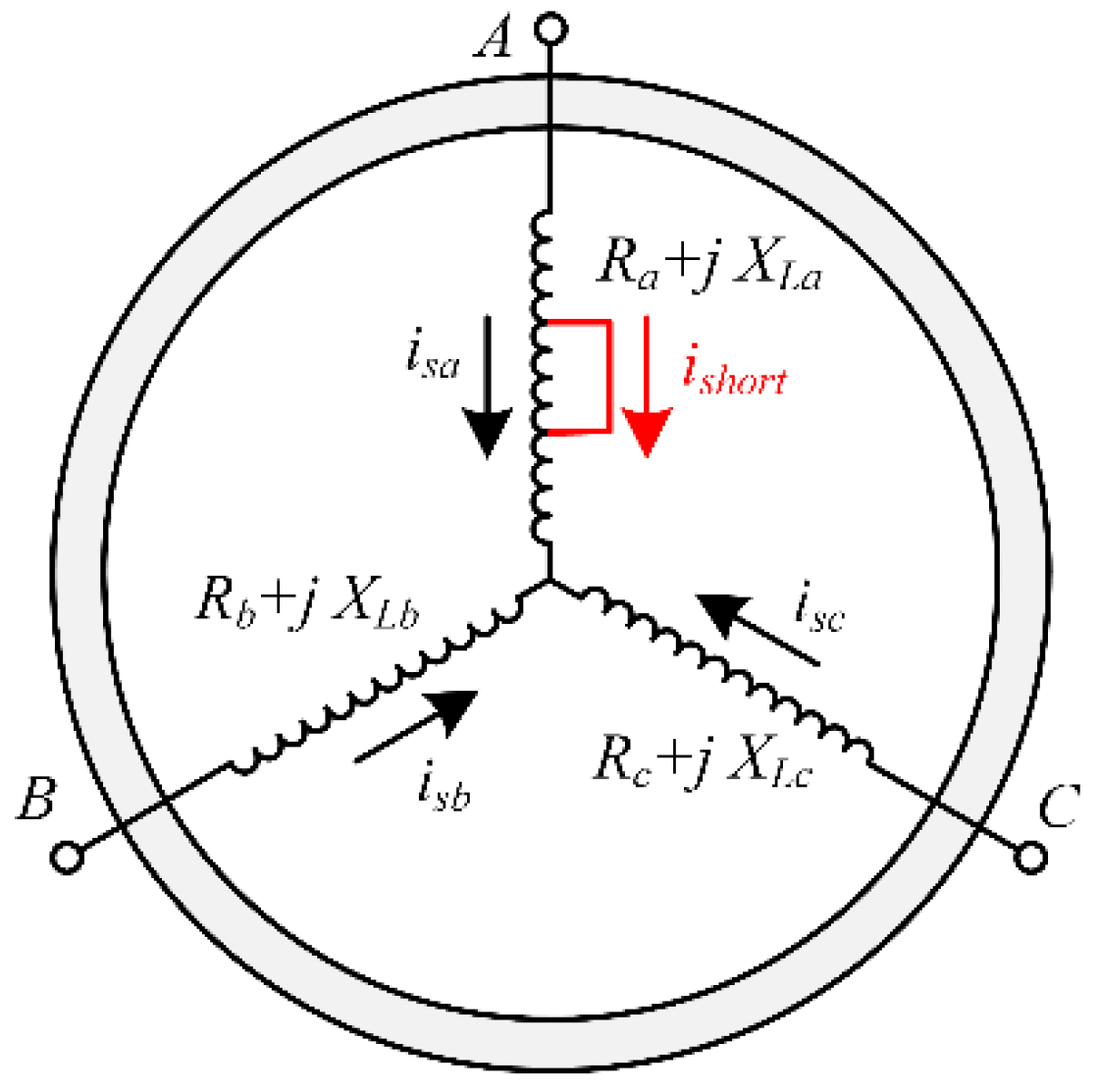
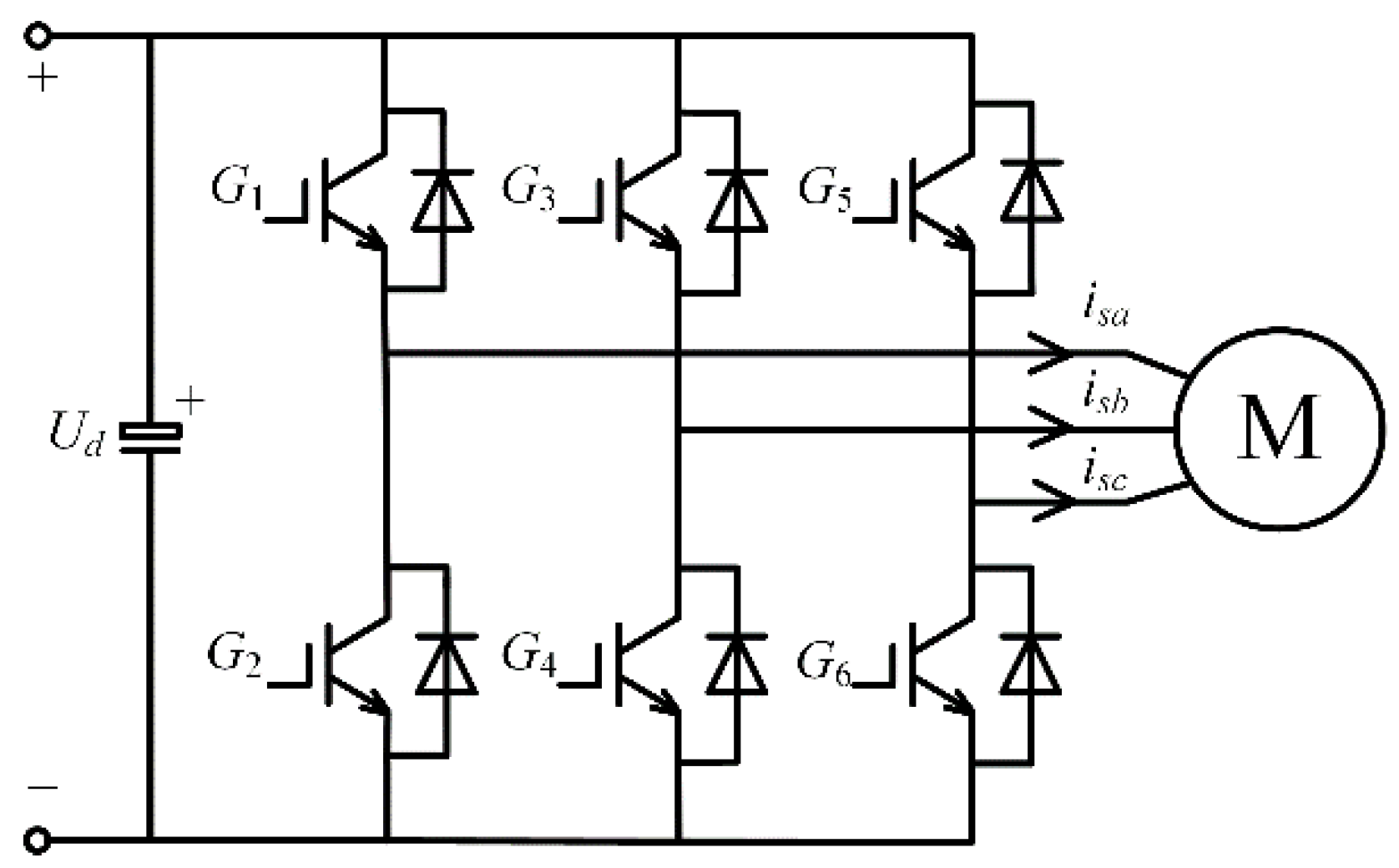
The stator windings are symmetrically distributed when the TM is normal. While the SISCF occurs, the symmetry is destroyed. The schematic diagram of the SISCF is shown in
Figure 1. The three-phase stator winding impedances of the healthy motor are equal to each other. However, if the motor stator is at fault, the stator winding impedance changes. The three-phase symmetrical voltage acting on the asymmetrical stator impedance results in negative sequence currents.
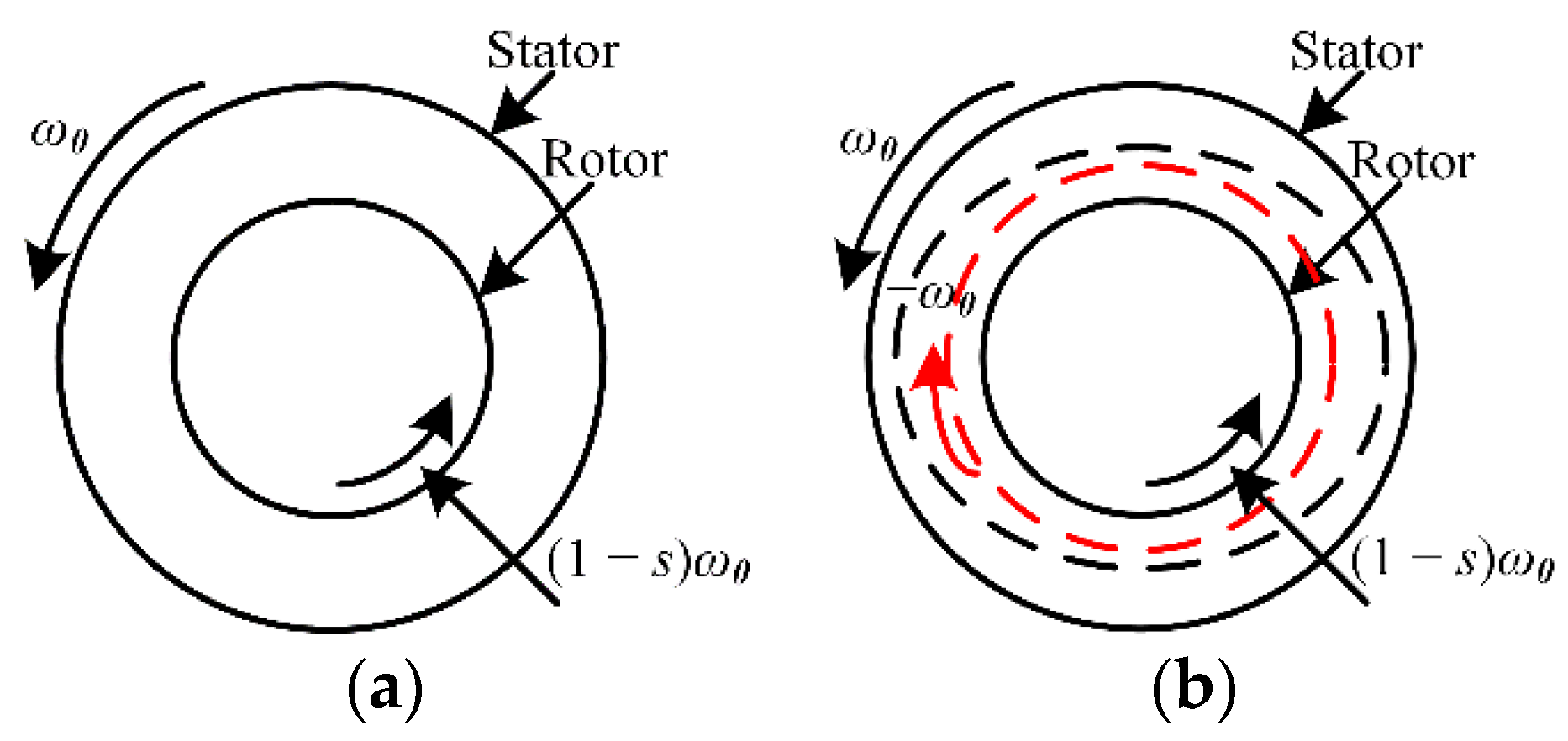
If the stator winding is asymmetrical, the air gap magnetic potential changes from circular to elliptical. Subsequently, the elliptical airgap magnetic potential can be decomposed into two components. The forward component is denoted as
F11, and the reverse is
F12. The two parts have the same rotational speed. Under the forward component
F11, the voltage potential and current with frequency
sf0 are induced in the rotor winding. Further, the rotor current generates a rotor magnetic potential
F21, which remains stationary with
F11. The forward component generates a constant forward electromagnetic torque
T1. However, under the action of the reversed component
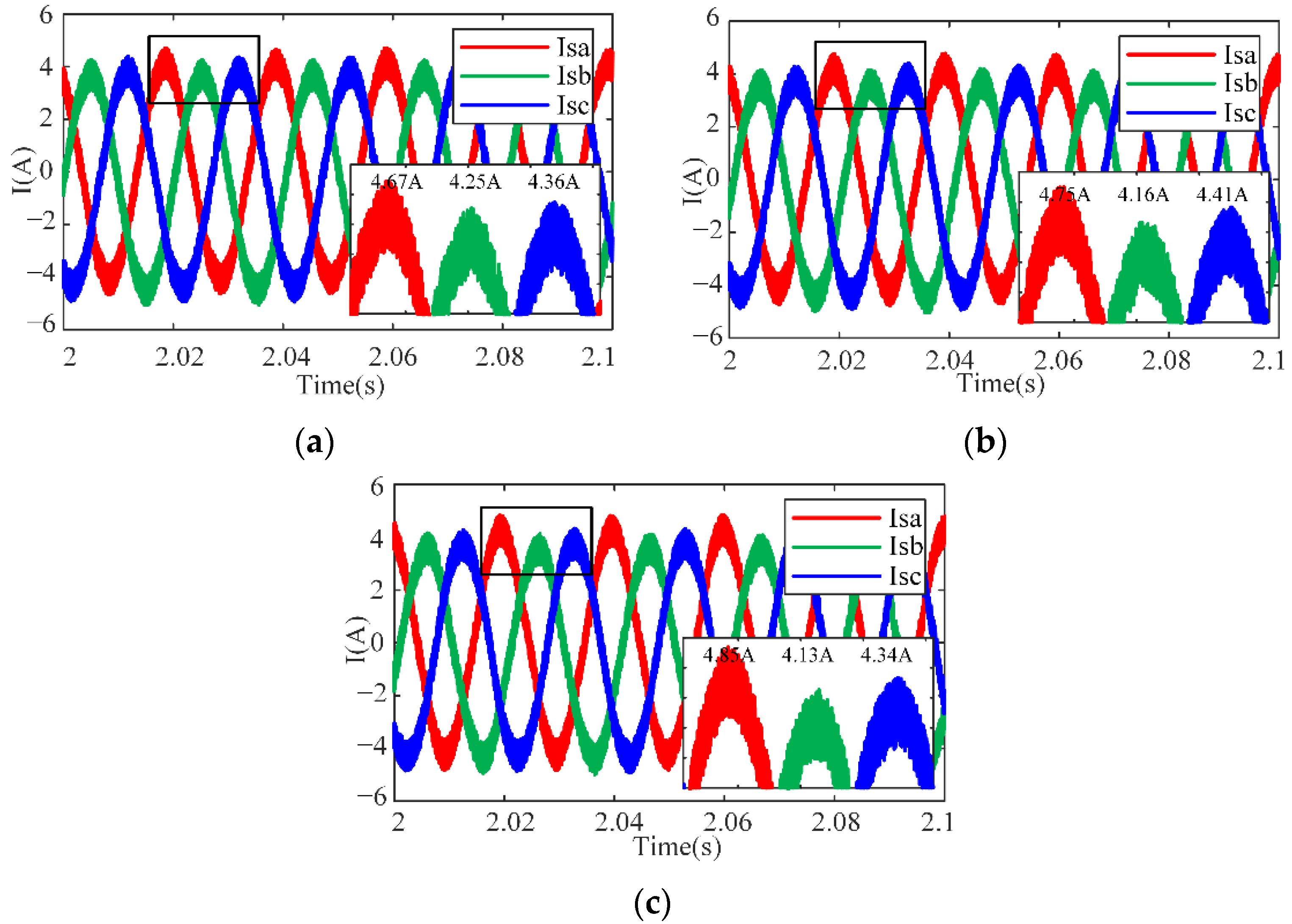
F12, the AC potential induced in the stator windings causes the negative sequence component in stator currents. It is evident that the deeper the fault, the larger the value of the negative sequence component, as shown in
Figure 2.
6. Conclusions
In this work, the prediction and diagnosis of SISCF were successfully achieved. A novel approach was proposed based on the relationship between geometric characteristics of PVT and fault characters of the TM. This paper accomplished the following work.
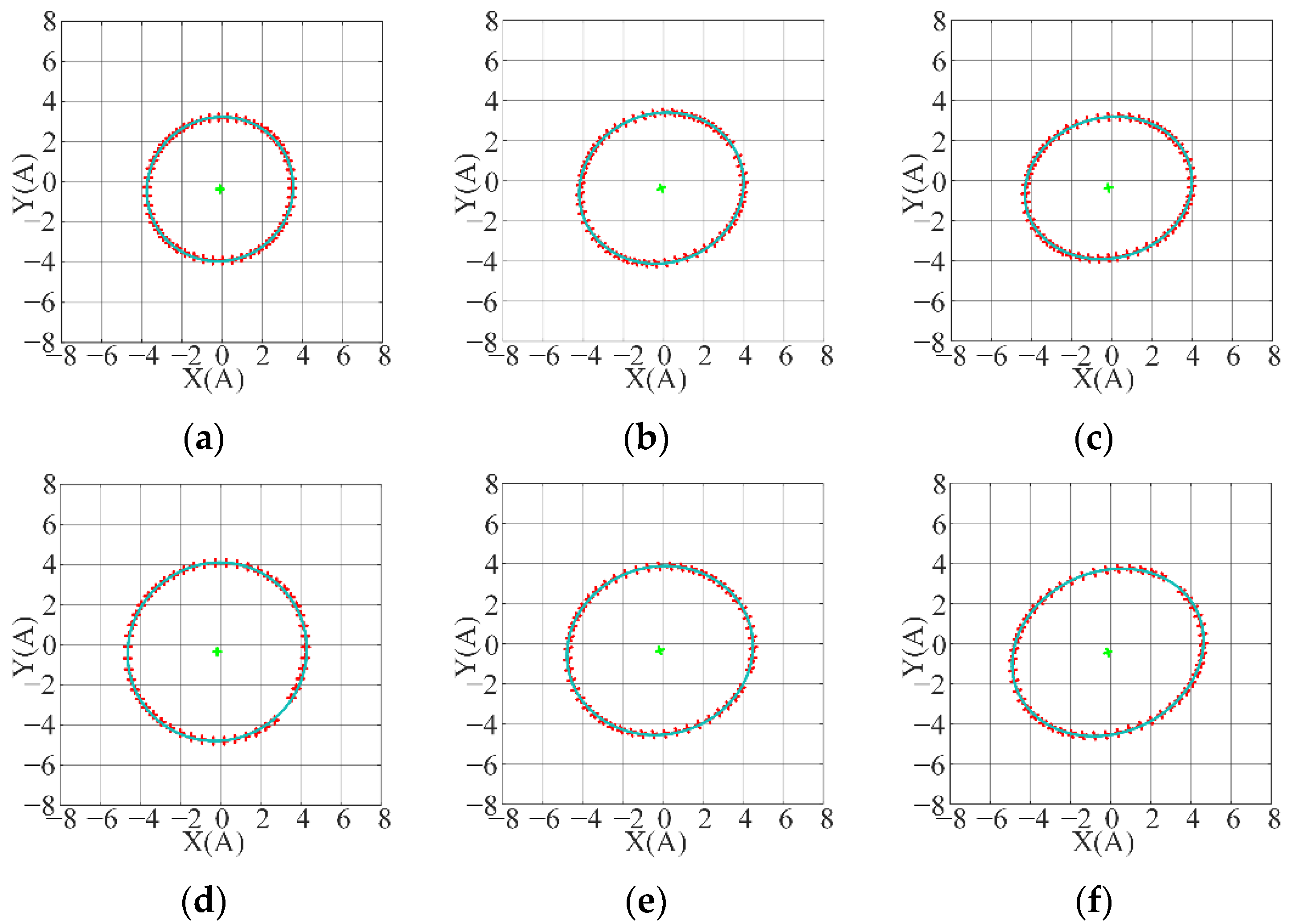
The ellipse was fitted to the PVT of the stator current to obtain elliptical parameters by the least square method. The negative sequence current in the stator was derived by the parameters. This method could overcome the problems of sensor errors, zero drifts, and motor frequency fluctuations.
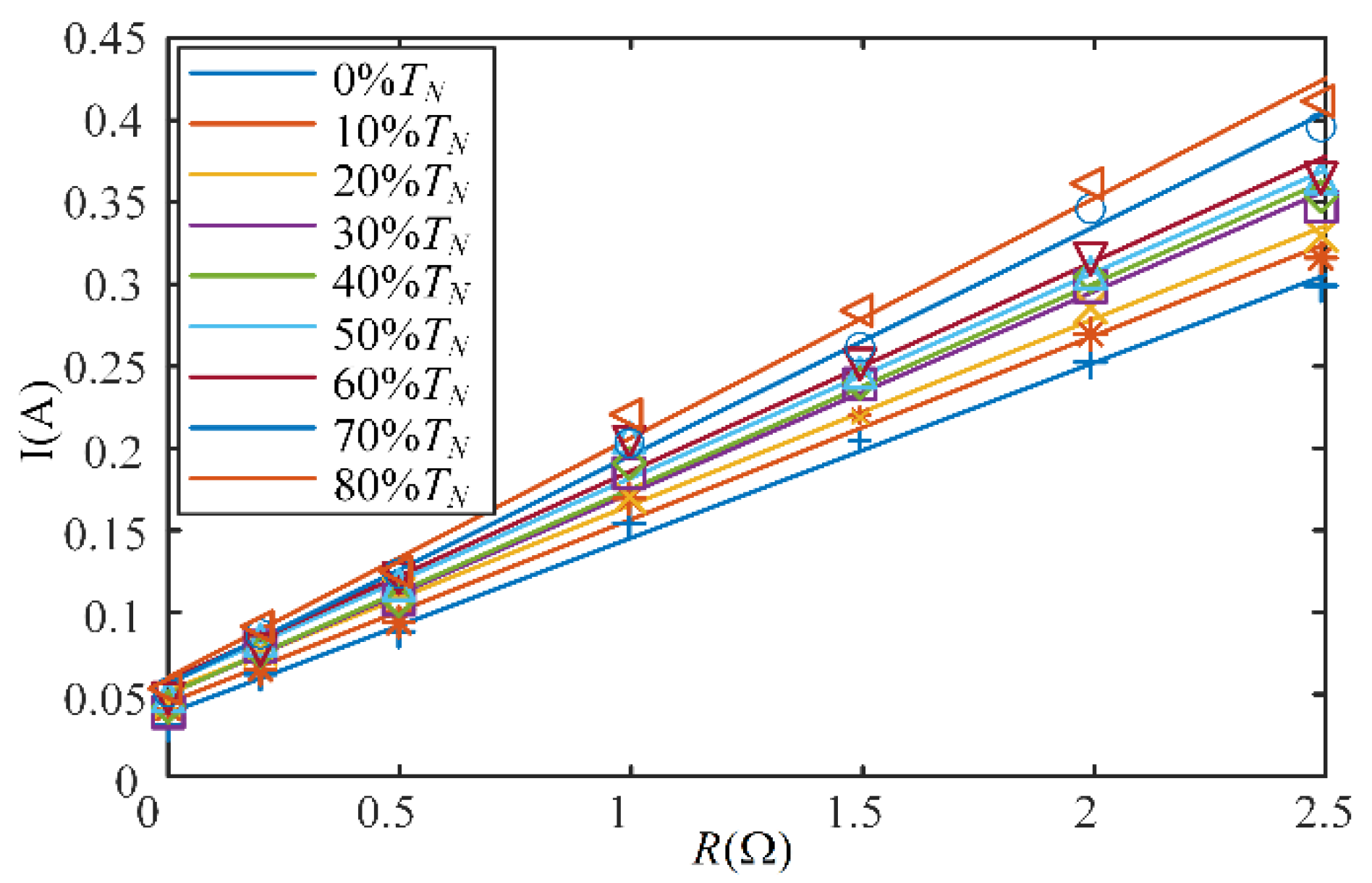
The SISCF diagnosis was achieved based on the negative sequence current. The polynomial fitting was performed to the negative sequence current to get the relationship between the current and fault degrees at different load levels. The prediction of fault, which contains fault degree prediction and fault phase location, was achieved by the combination of the trend of the negative sequence current and inclination angle of the ellipse major axis.
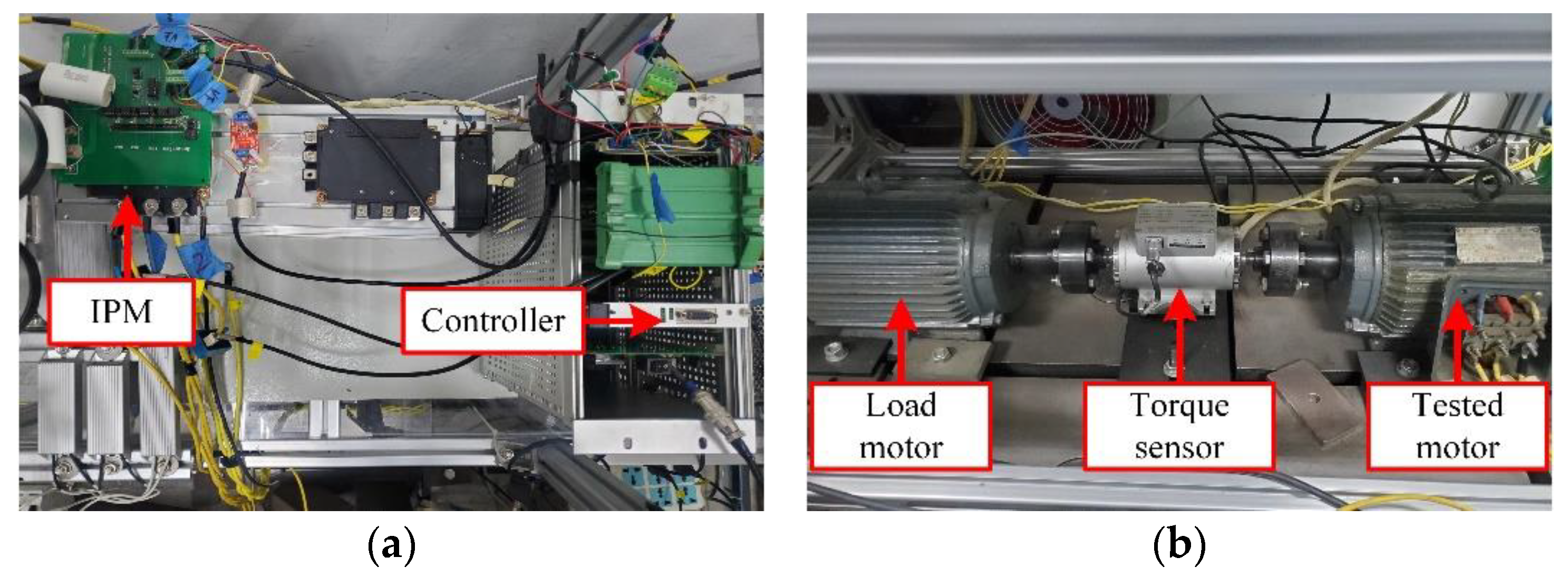
The proposed diagnosis and prediction method was investigated by the simulation and a series of experiments. The simulation and experimental results were consistent, which verifies the correctness and effectiveness of the proposed method.
Notably, the SISCF leads to the asymmetry of stator impedance, which is the cause of the negative sequence component in the stator currents. This study uses the negative sequence current as the object to identify this stator asymmetry fault. Some other im-pedance asymmetry faults inside or outside the stator may cause similar results, such as phase-to-phase short circuit fault.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}