
A Robust Fractional-Order PID Controller Based Load Frequency Control Using Modified Hunger Games Search Optimizer


 ,
,  and
and 
Abstract
:1. Introduction
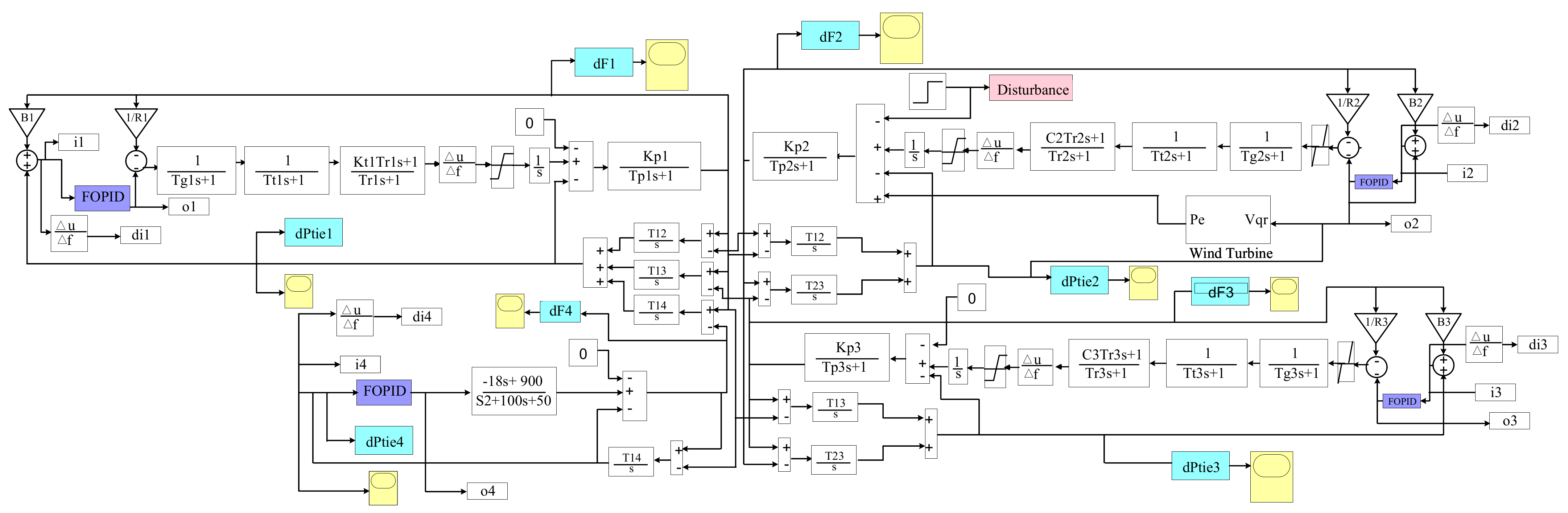
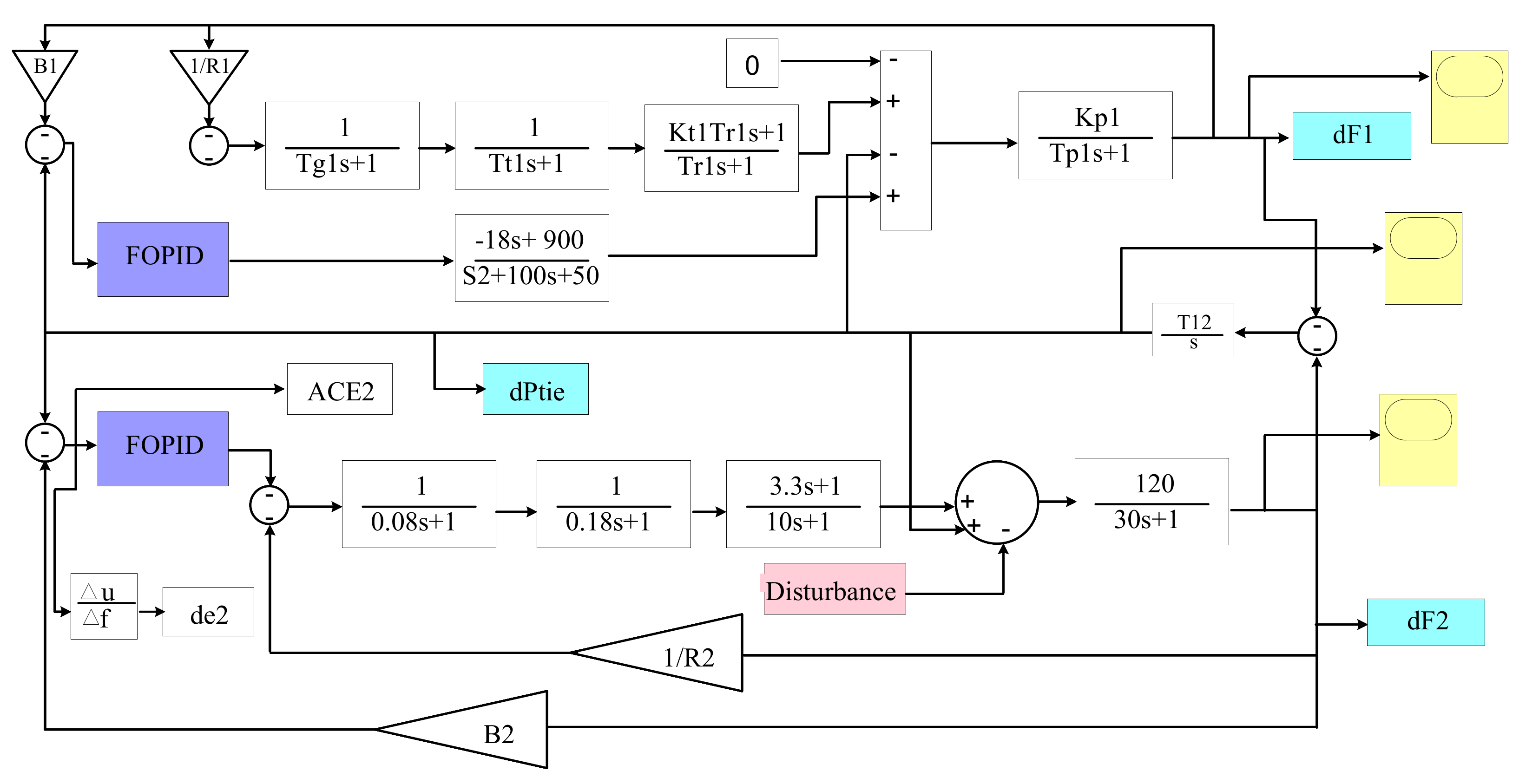
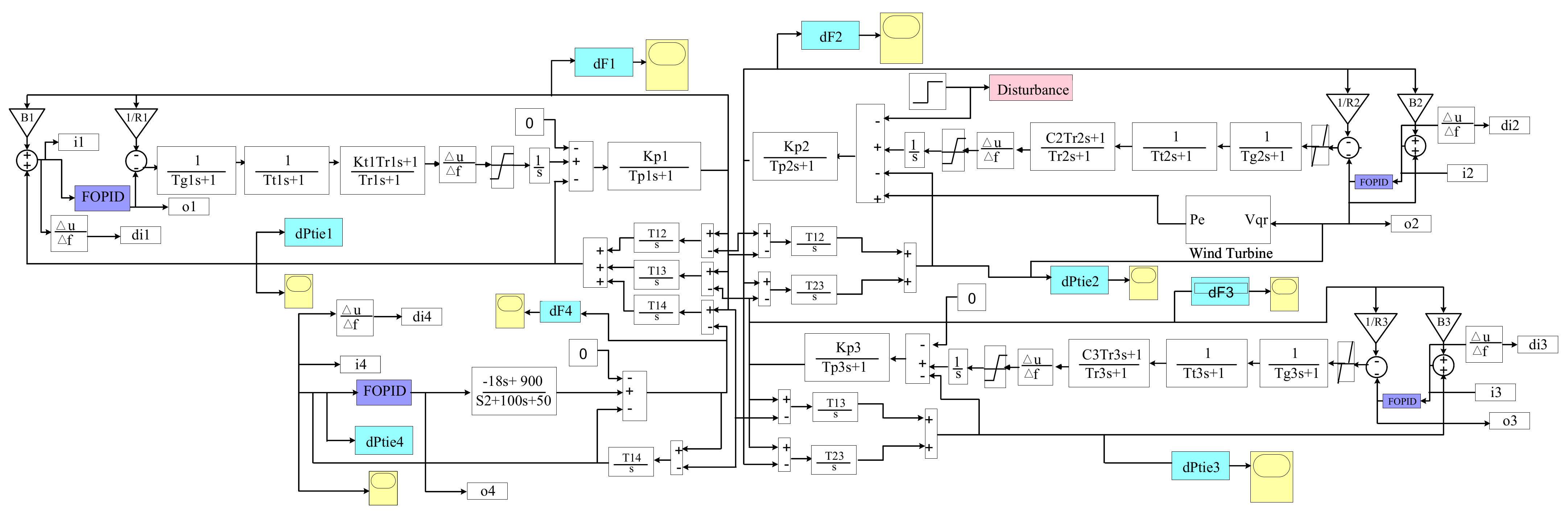
2. System Modeling
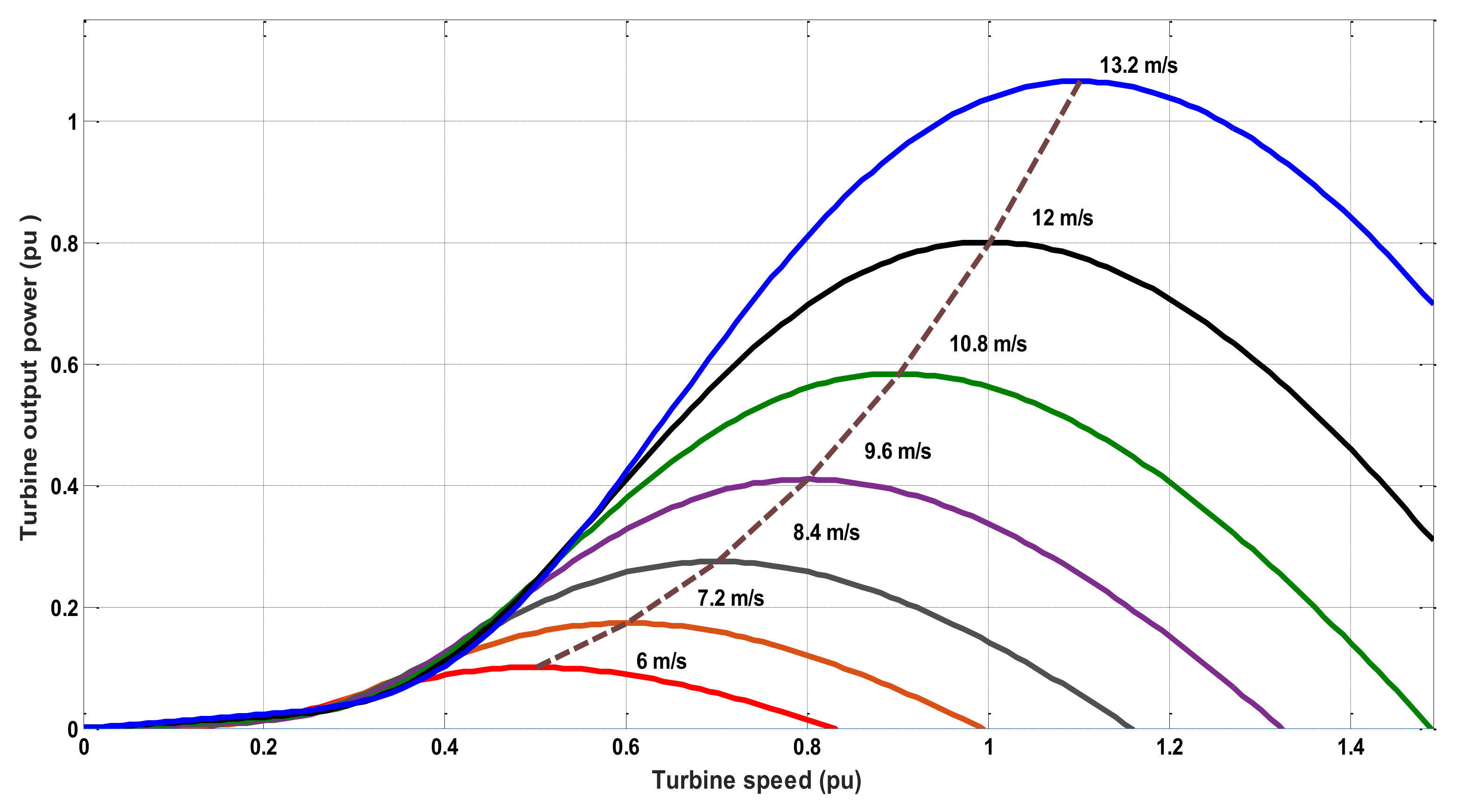
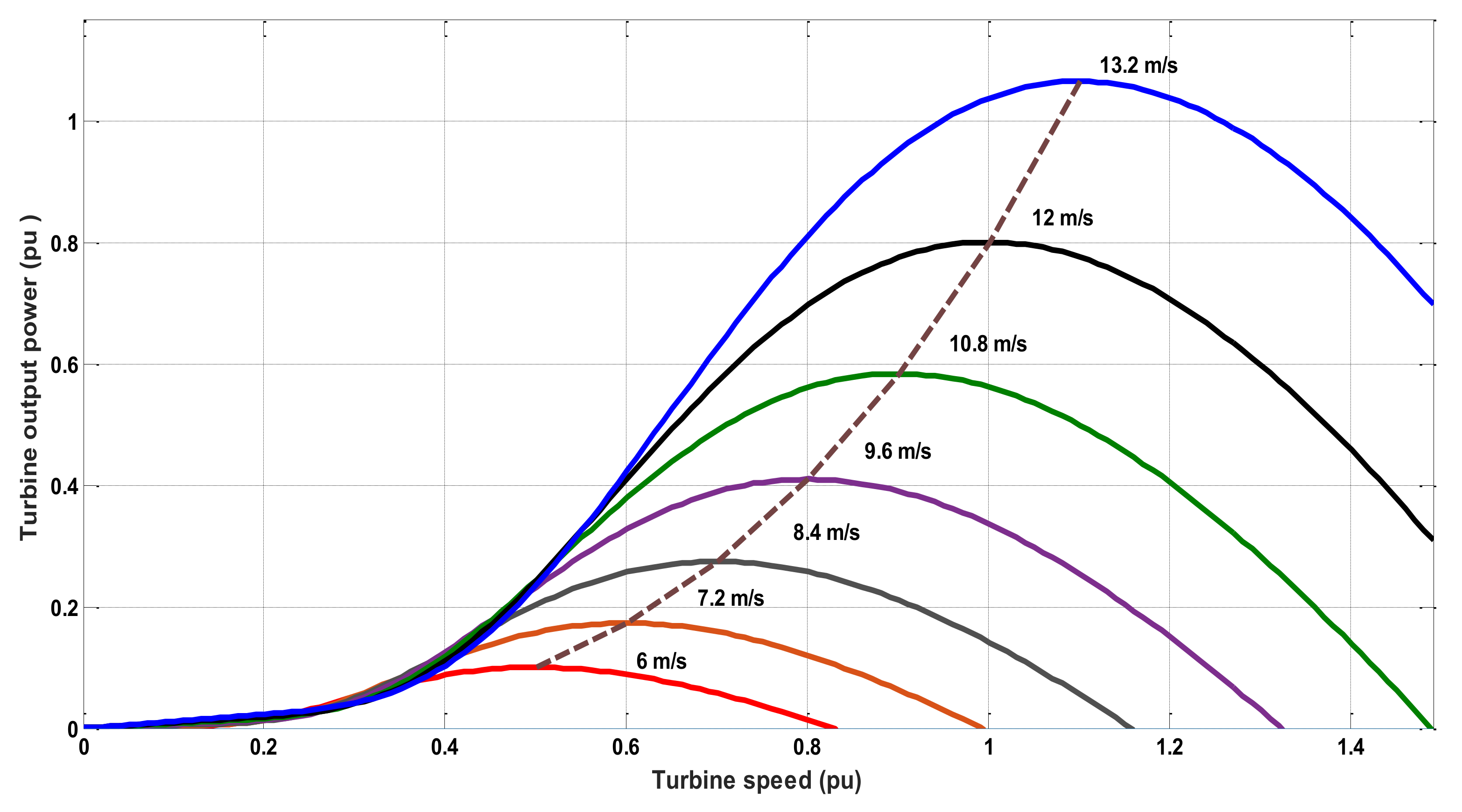
2.1. Model of Wind Turbine Plant
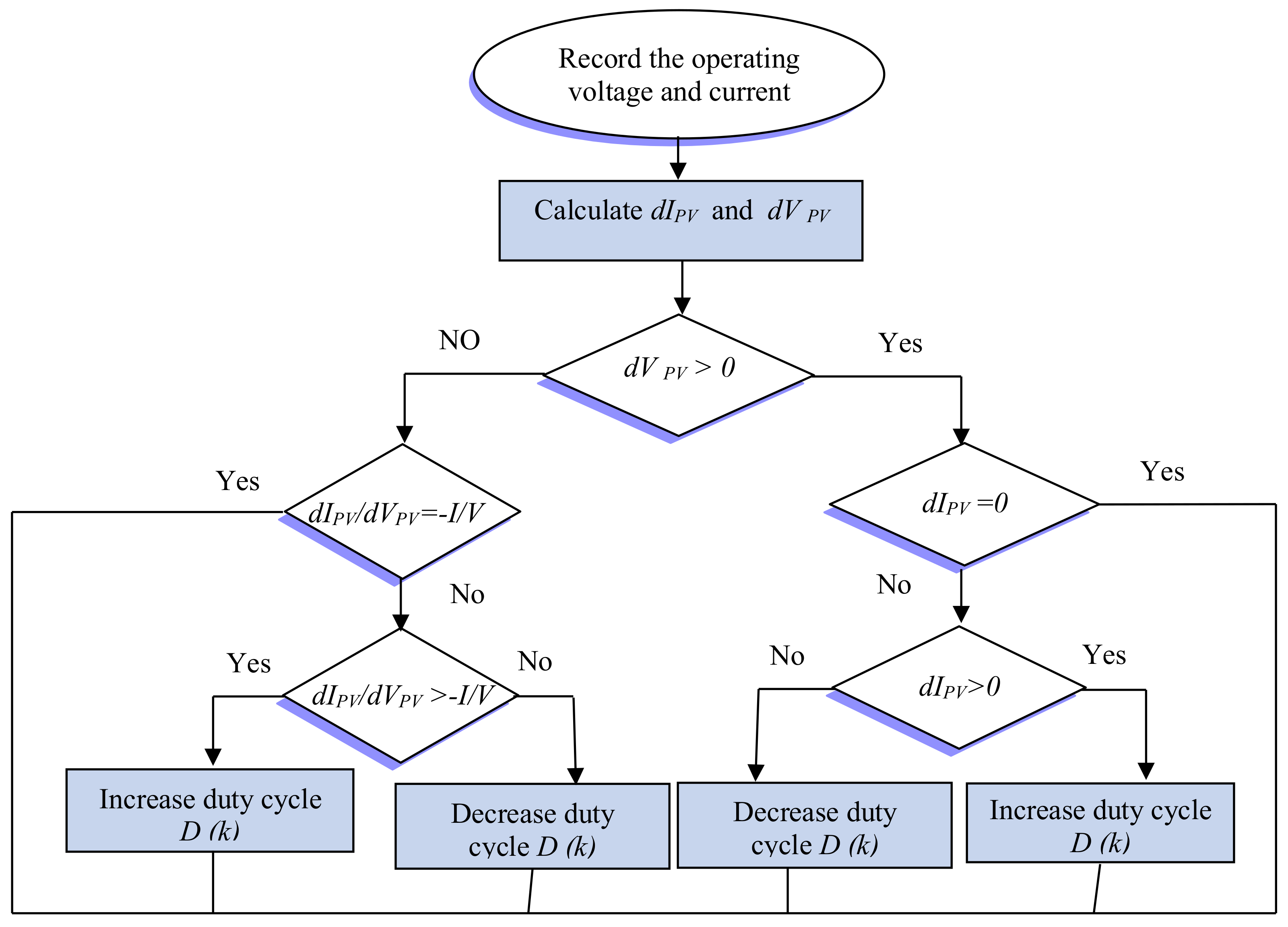
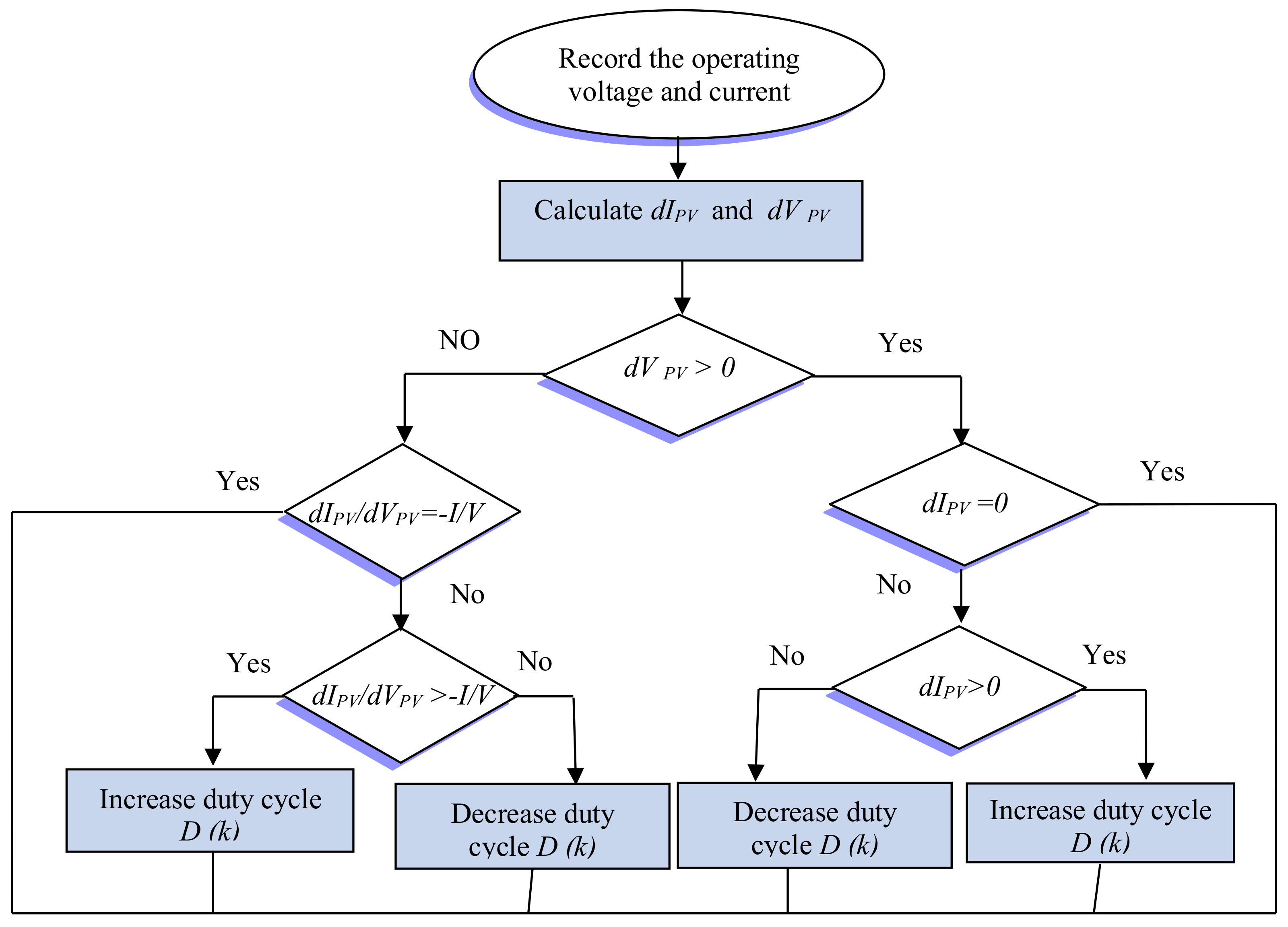
2.2. PV Array Model
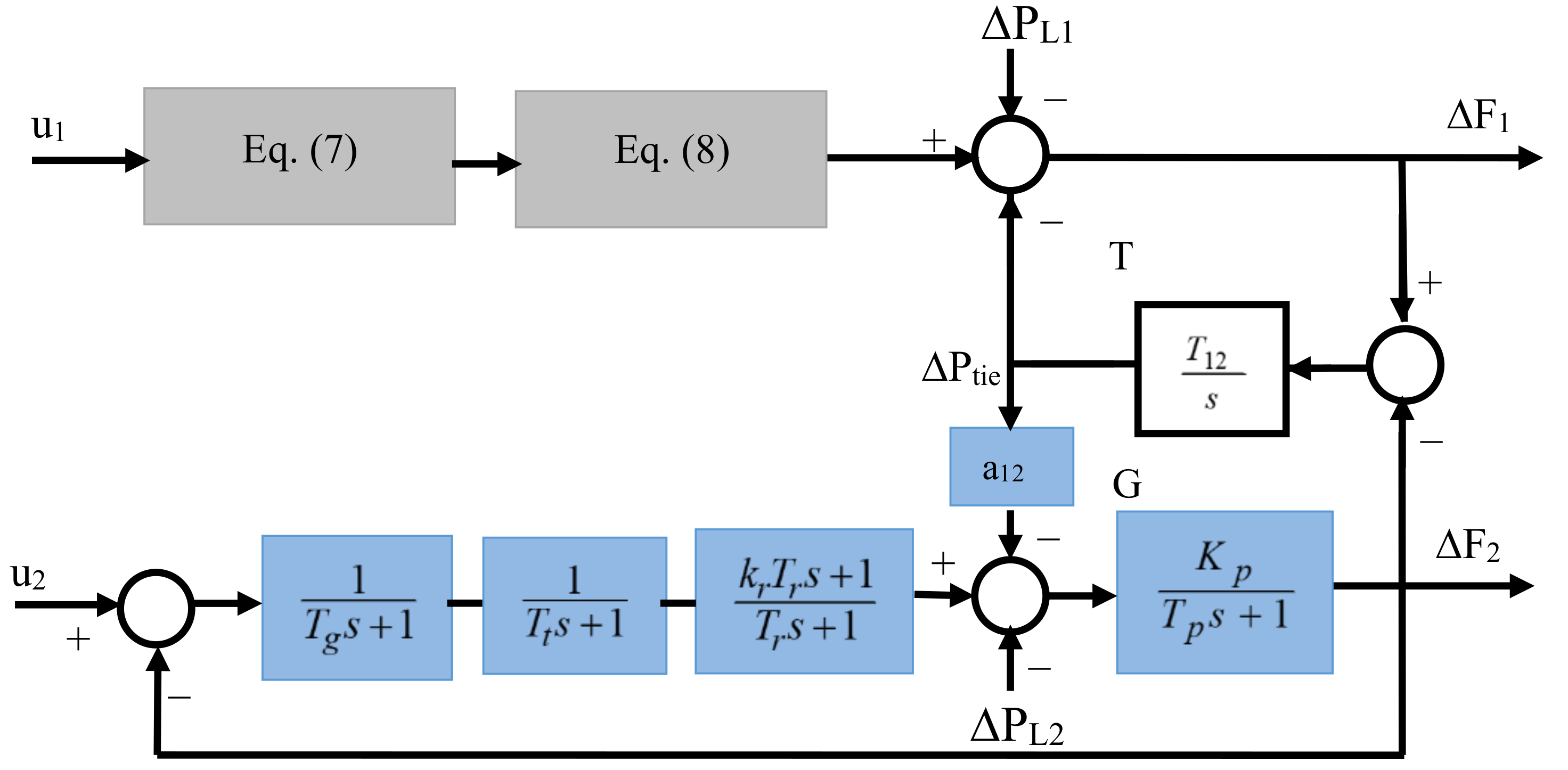
2.3. Thermal Power Plant Model
- -
- Governor model
- -
- Reheater model
- -
- Turbine model
- -
- Generator model
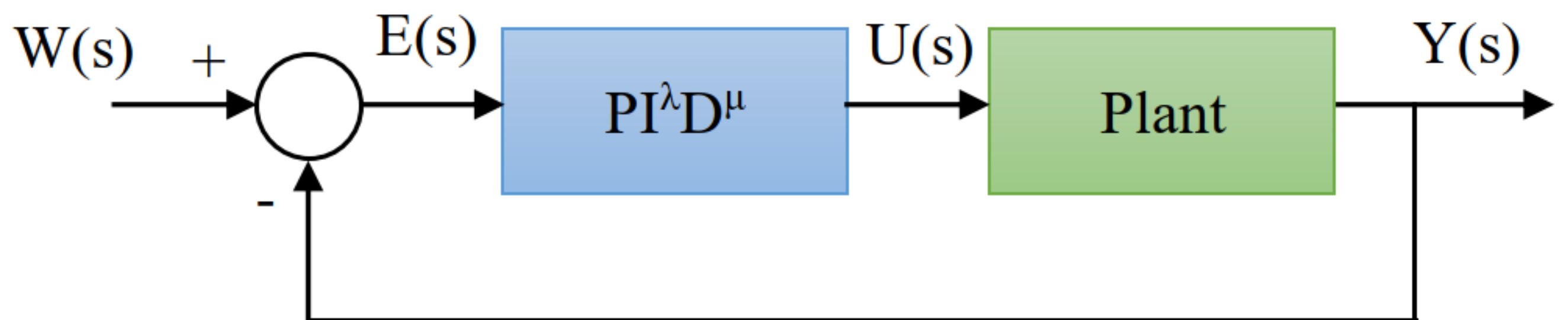
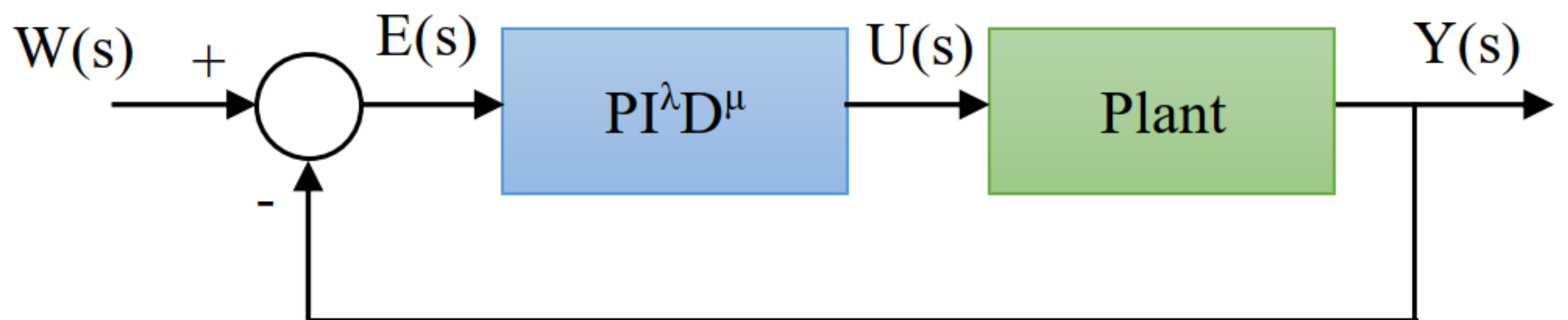
3. Problem Formulation
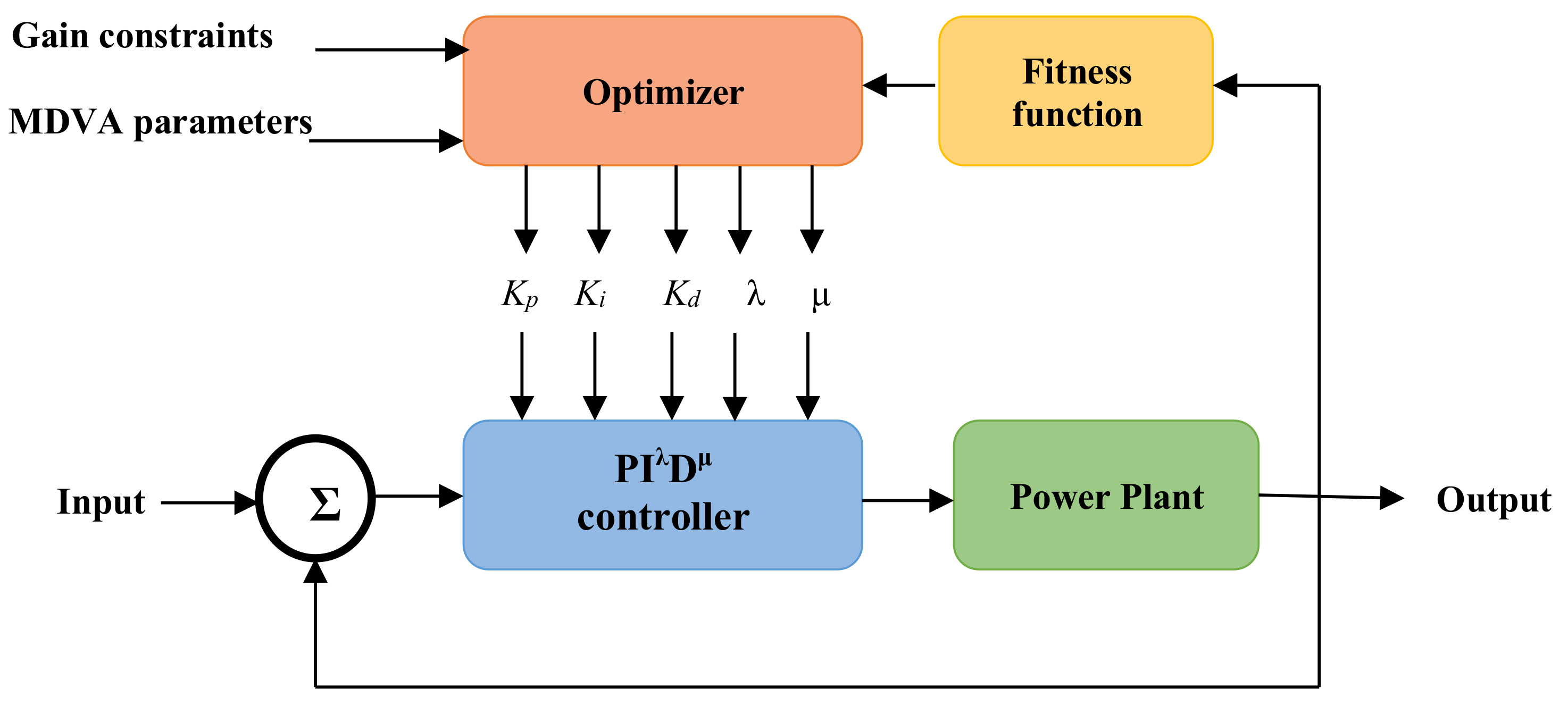
4. The Proposed Solution Methodology
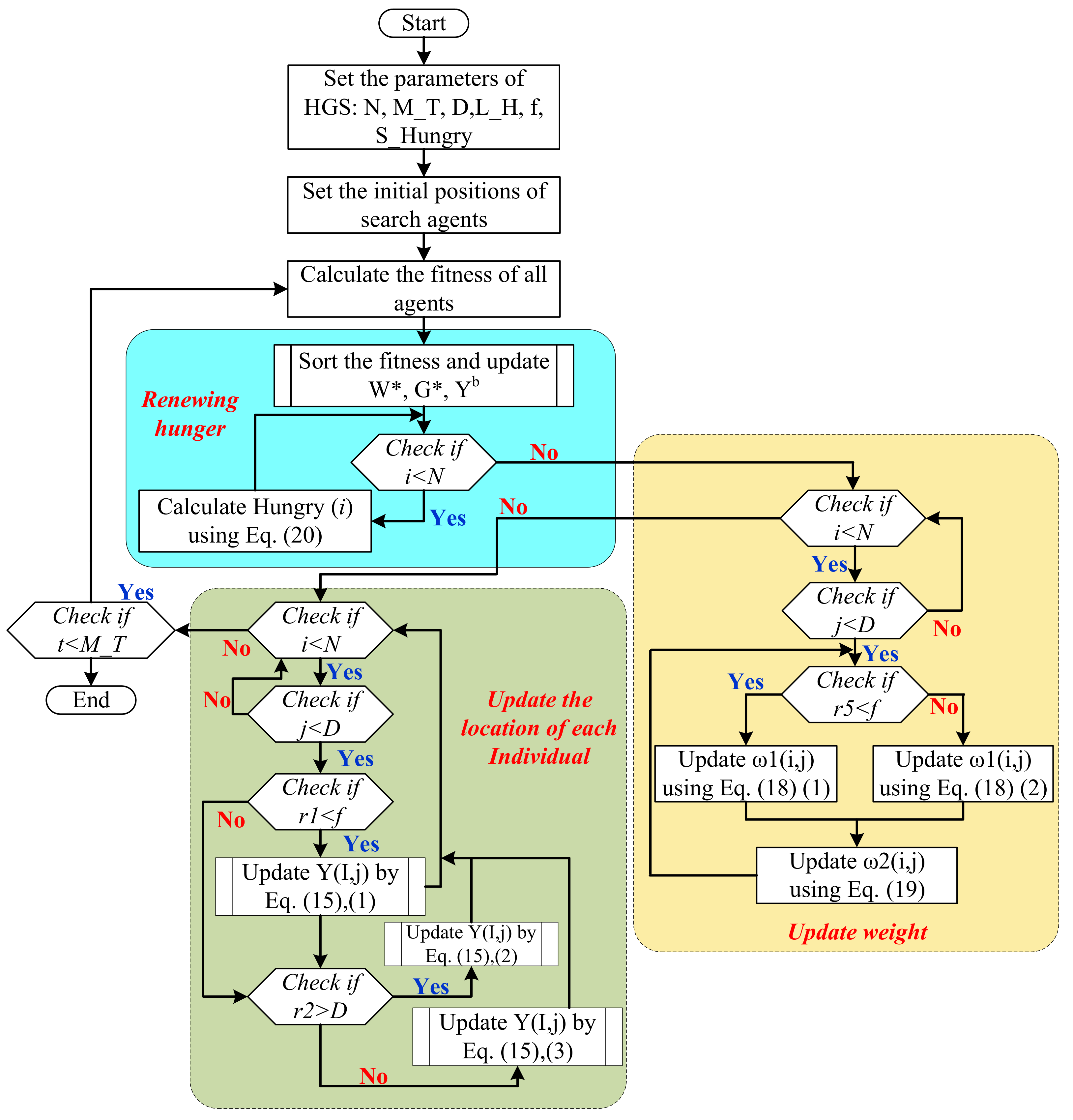
4.1. Overview Hunger Games Search Optimizer
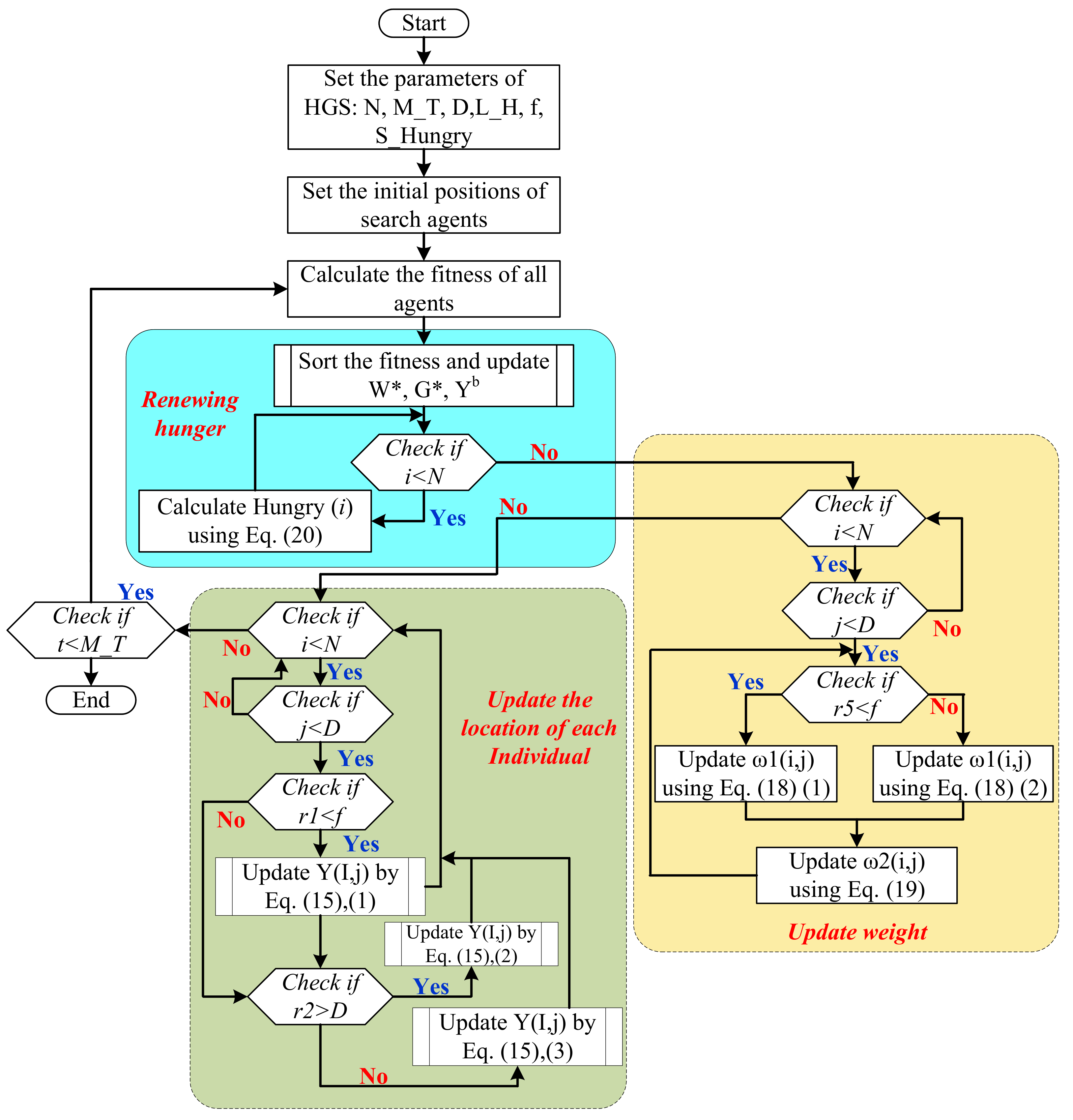
- Tuning the ranging controller (): Yang et al. [54] suggested the following equation to implement the animal shrinking manner across the iterations (t):where illustrates the total number of iterations, refers to a random number in the interval of [0,1].
- Tuning the weights () and (): Yang et al. [54] used the following equations to boost the animals’ manner when looking for their food.where the random values in Equations (18) and (19) are symbolized by , , and . The is the hungry animal while is the sum of the hungry feelings of all animals at . The formula of is modeled as follows:where is a new hungry animal which is considered if the objective function of the animal is not equal to the best-attained objective so far . The respective new hunger of various animals is different. Therefore, in [54], the new hunger formula is considered aswhere is the worst value of fitness achieved so far. and are the the search space upper and lower limits, respectively. The is a constant value recommended to be 100 [54]. The HGS flowchart is shown in Figure 7.
4.2. The Proposed Modified Hunger Games Search Optimizer
| Algorithm 1 The non-uniform mutation operator. |
|
| Algorithm 2:Steps of MHGS. |
|
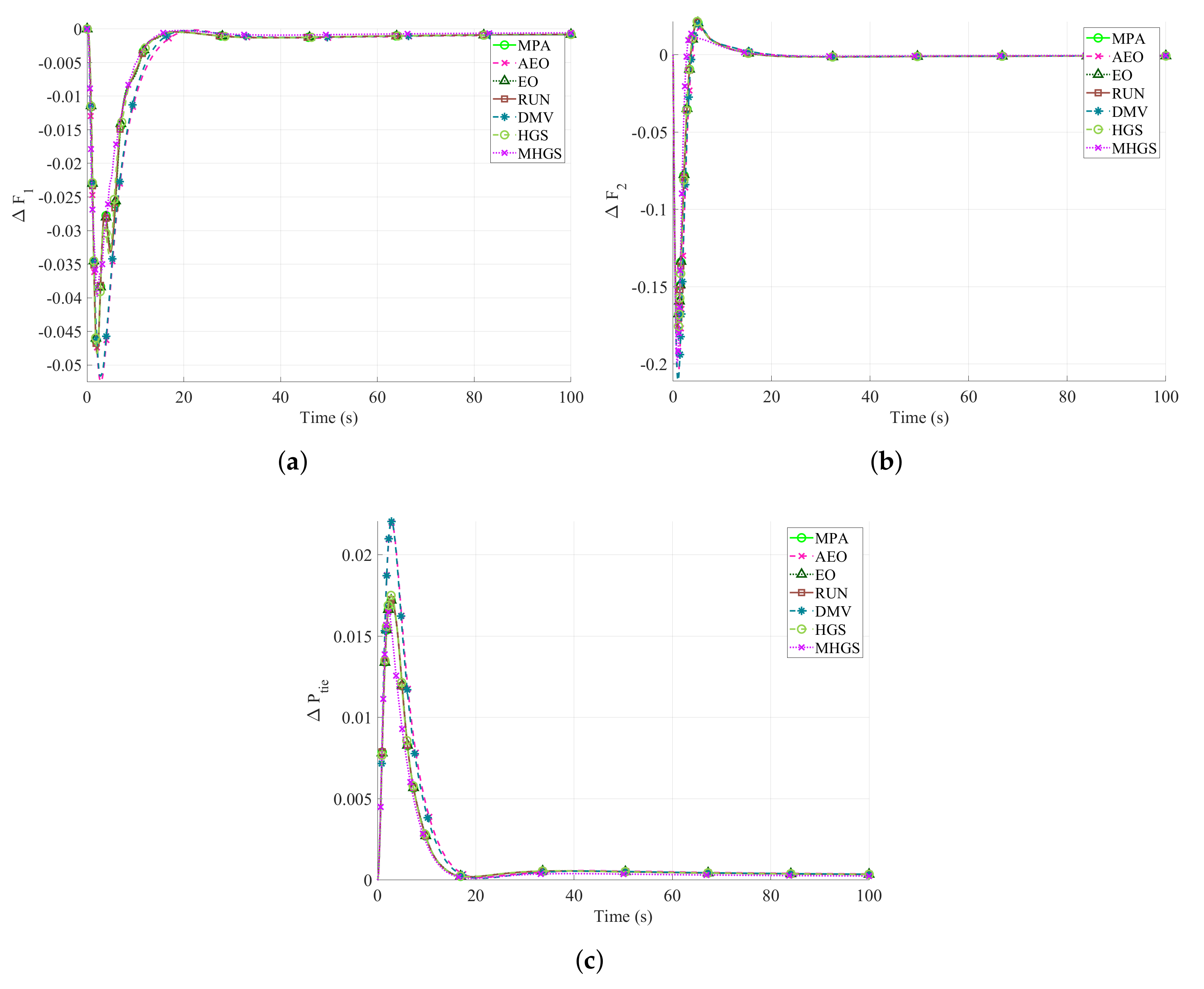
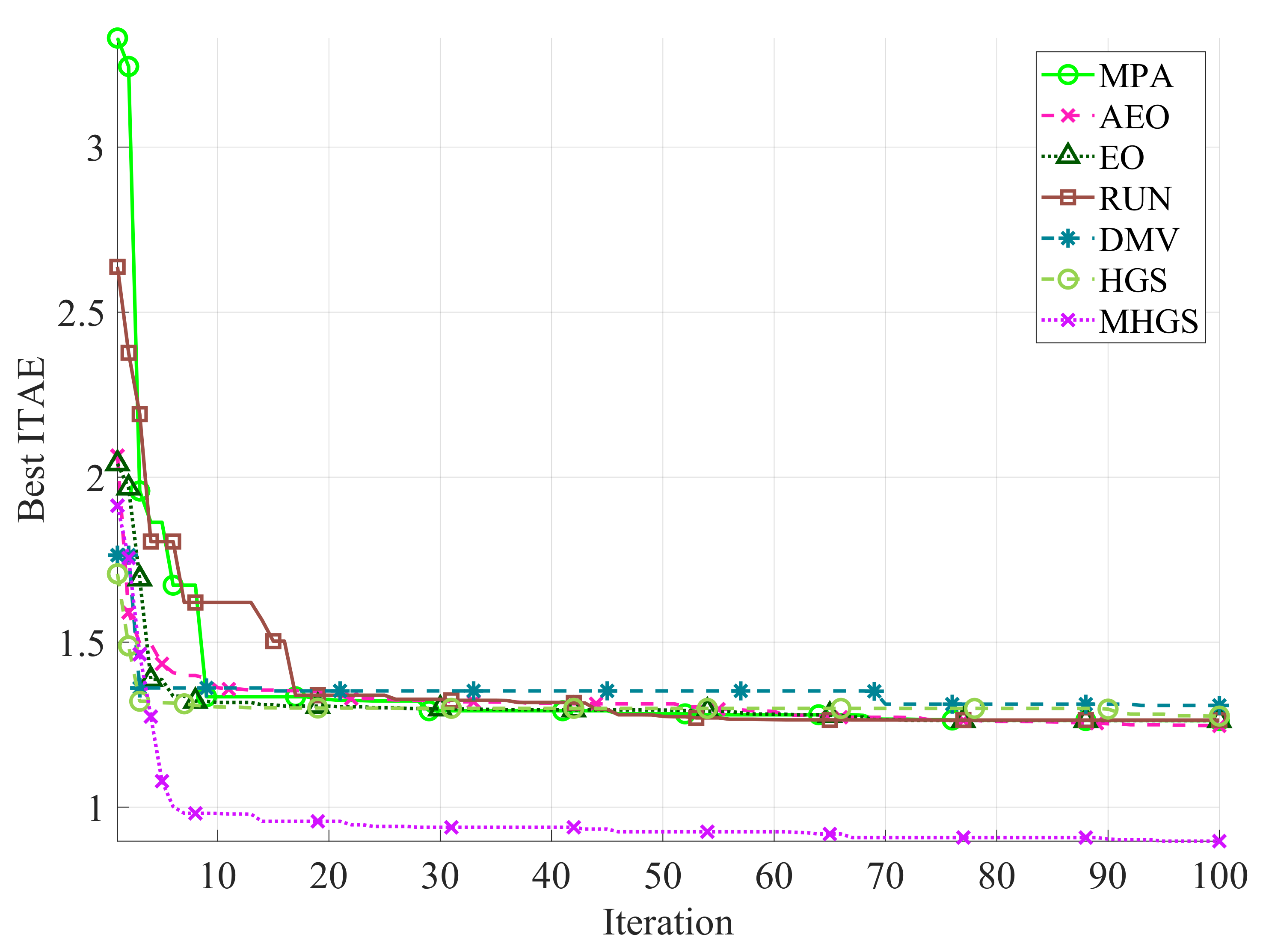
5. Simulation and Discussion
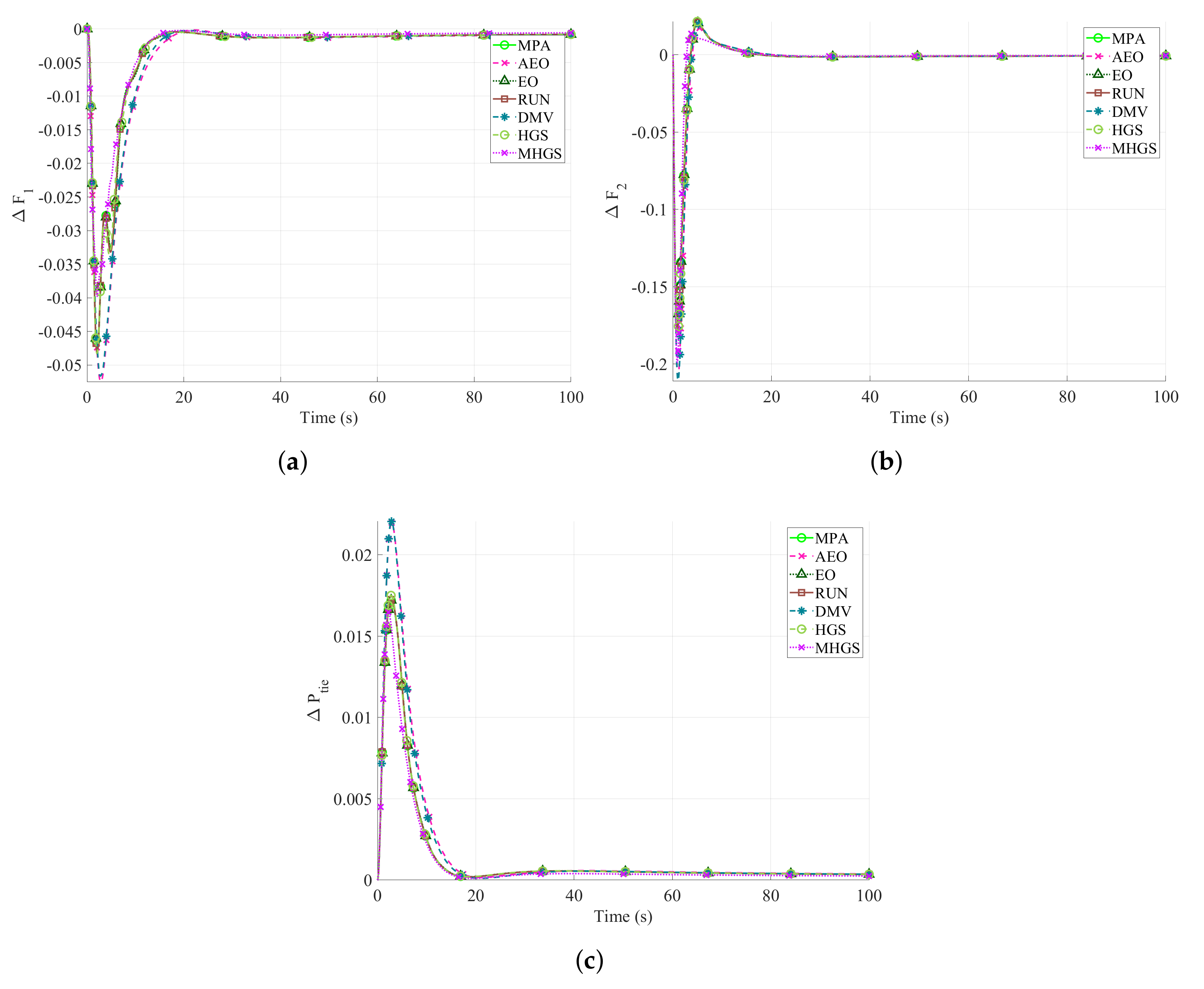
5.1. PV Interconnected System
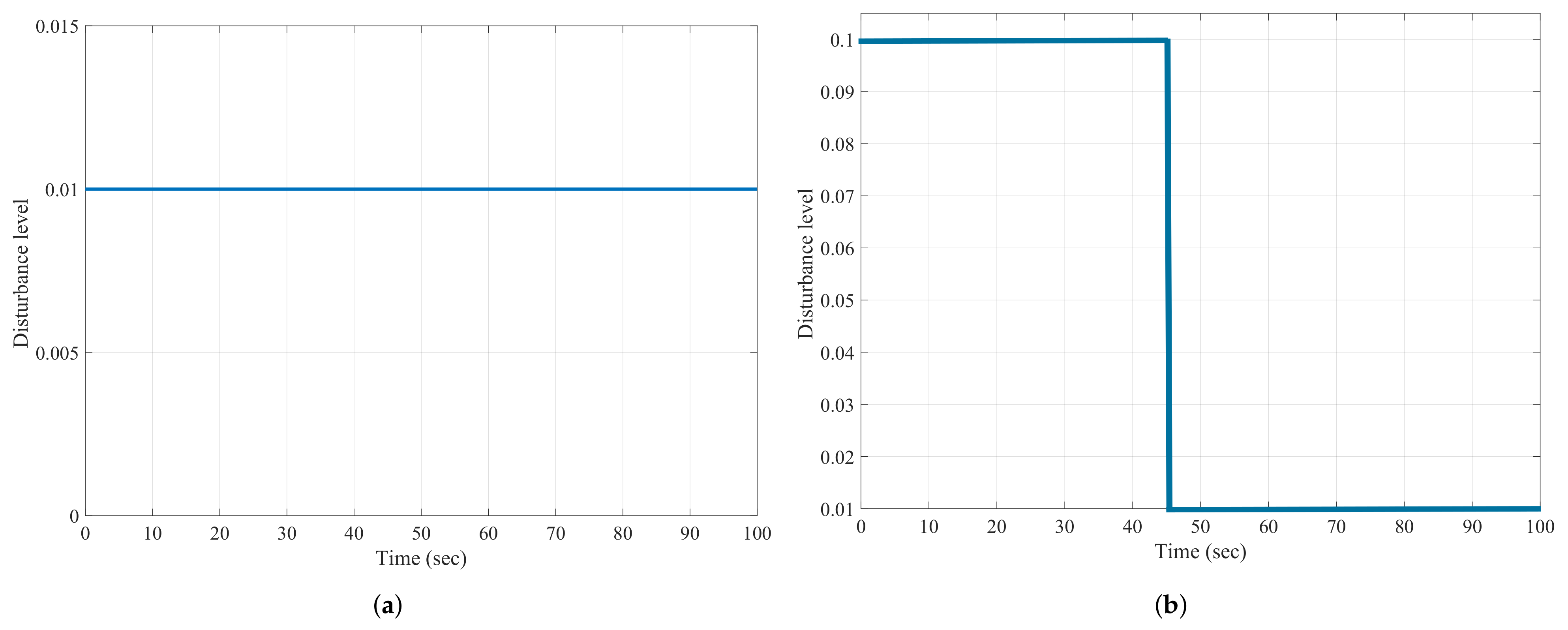
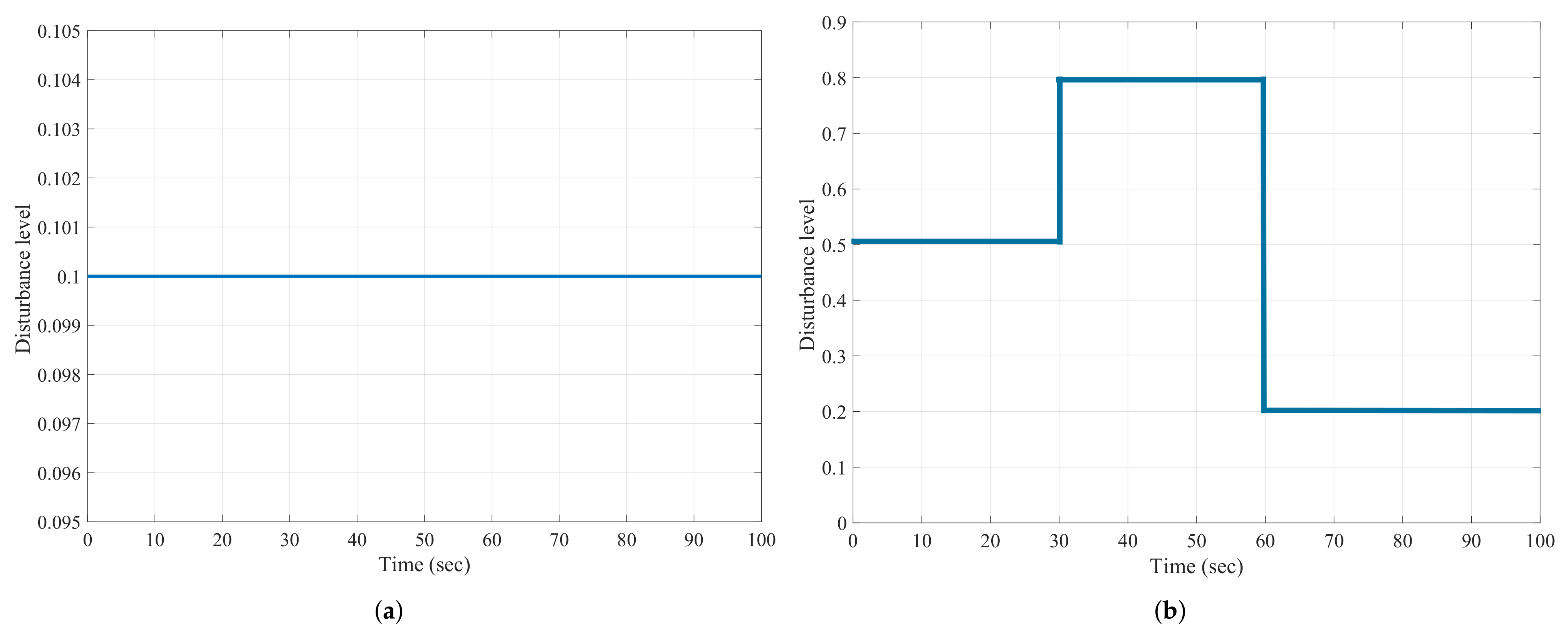
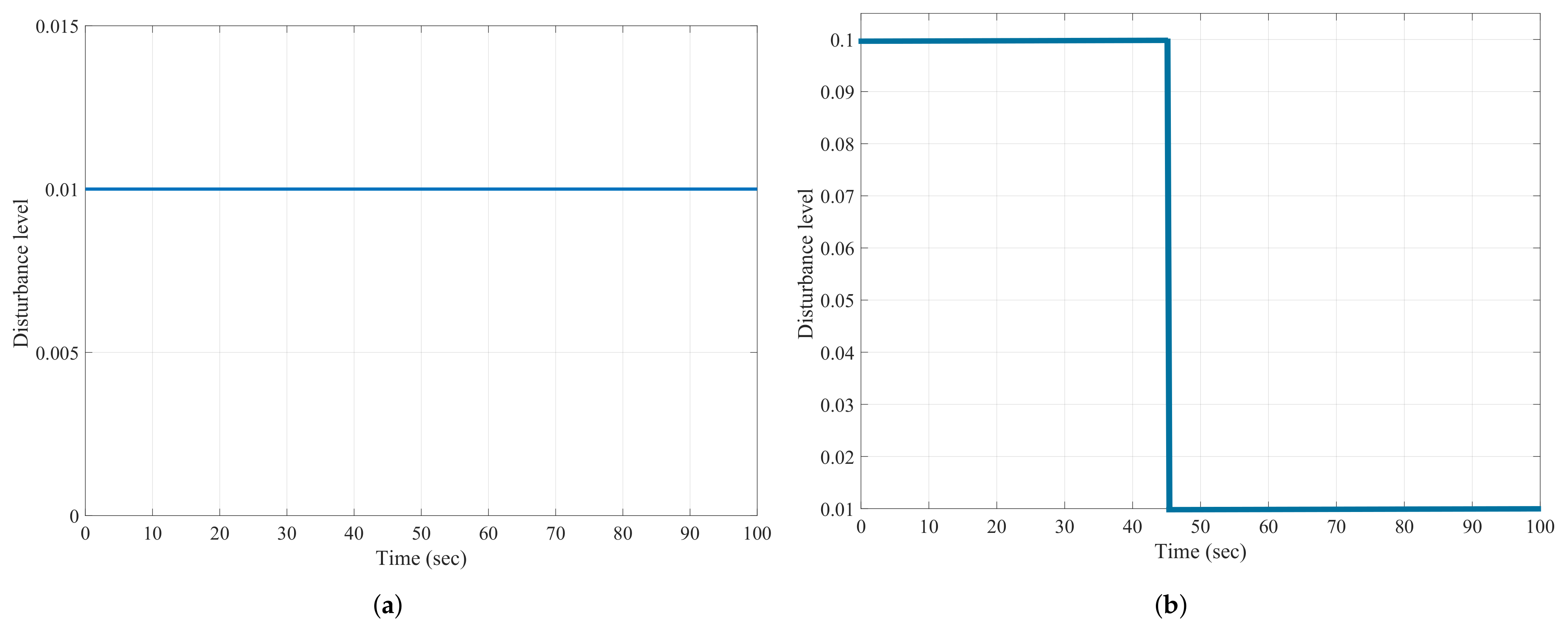
Robustness Evaluation under Variable Disturbance: Two Areas
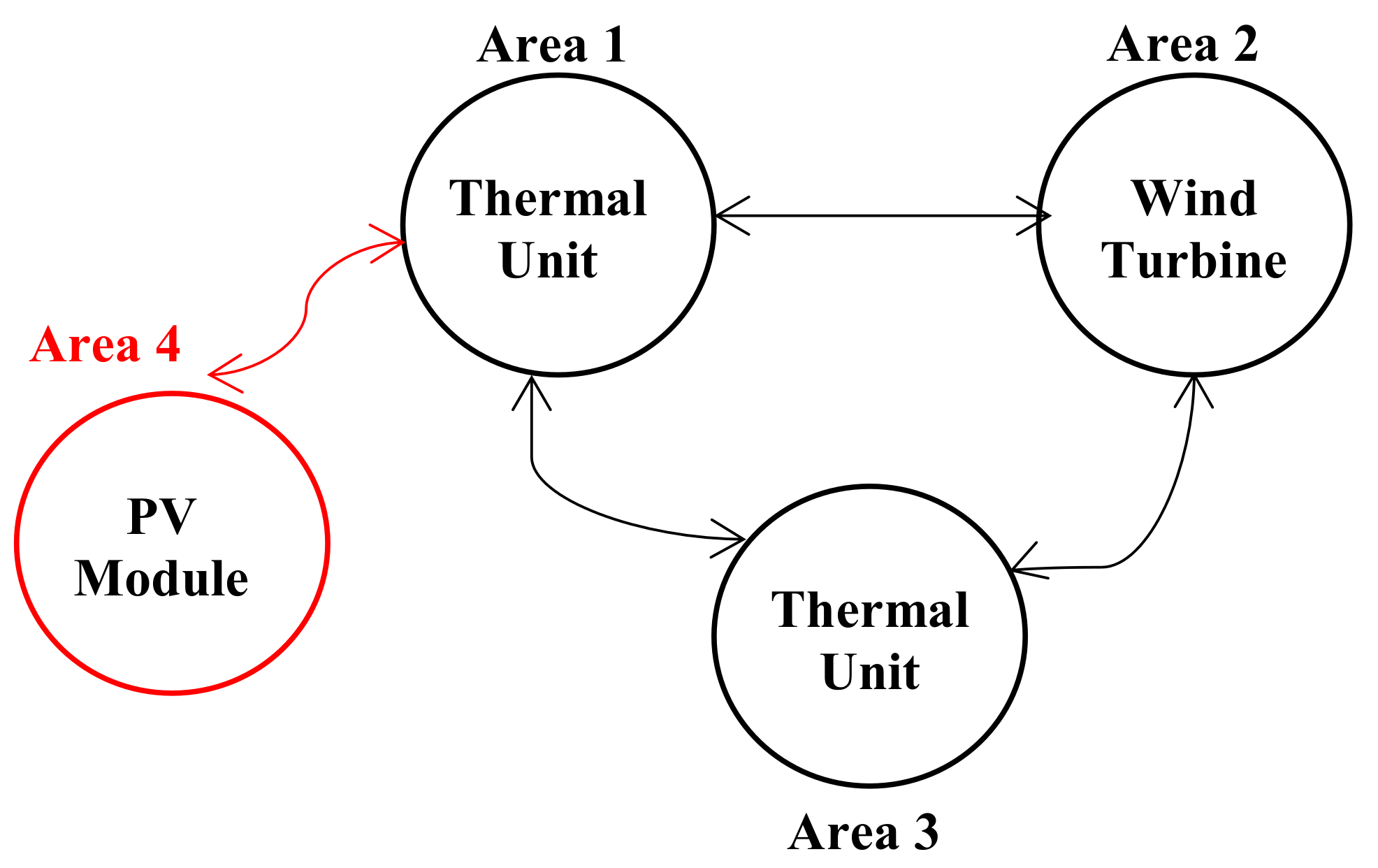
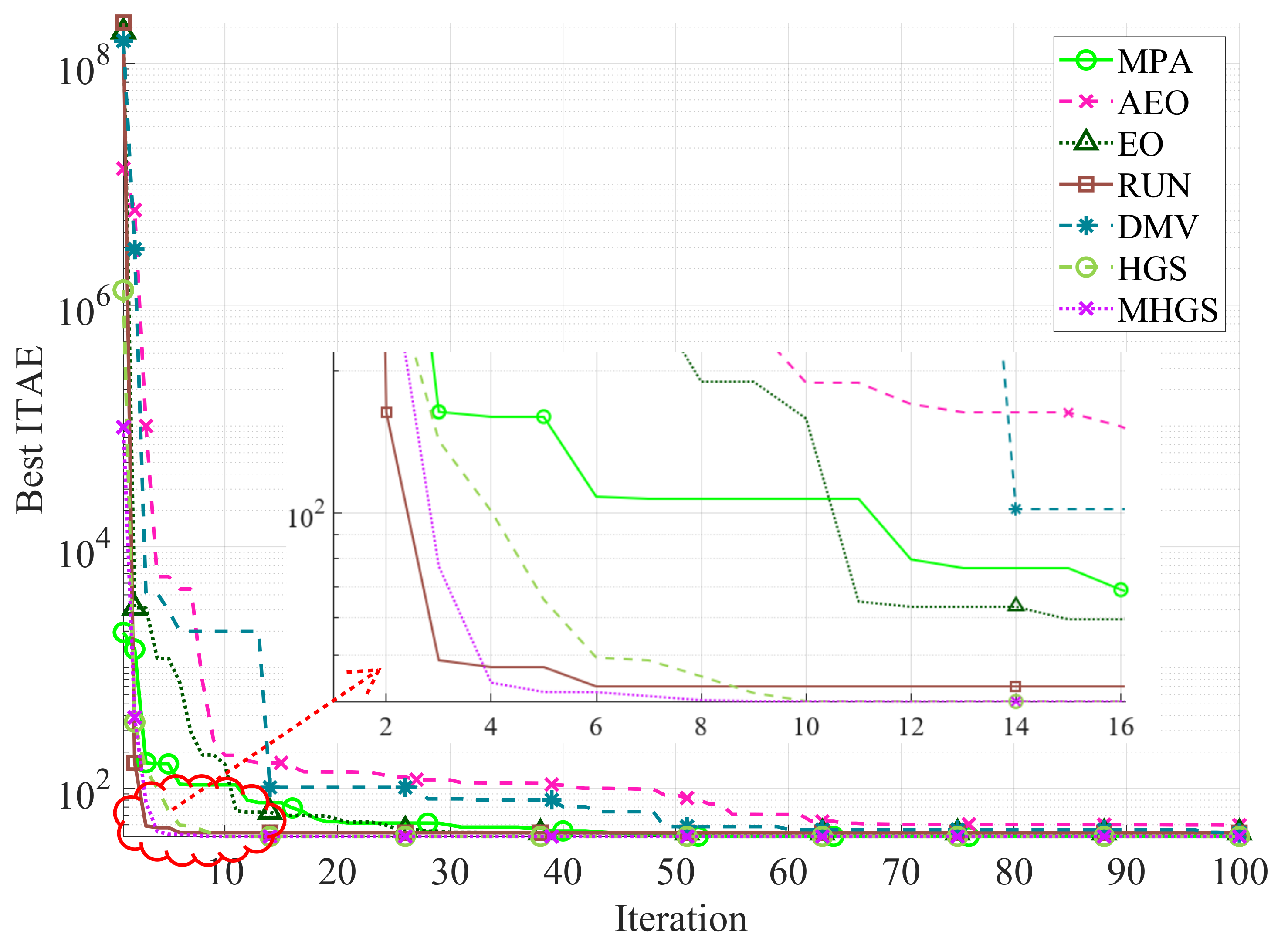
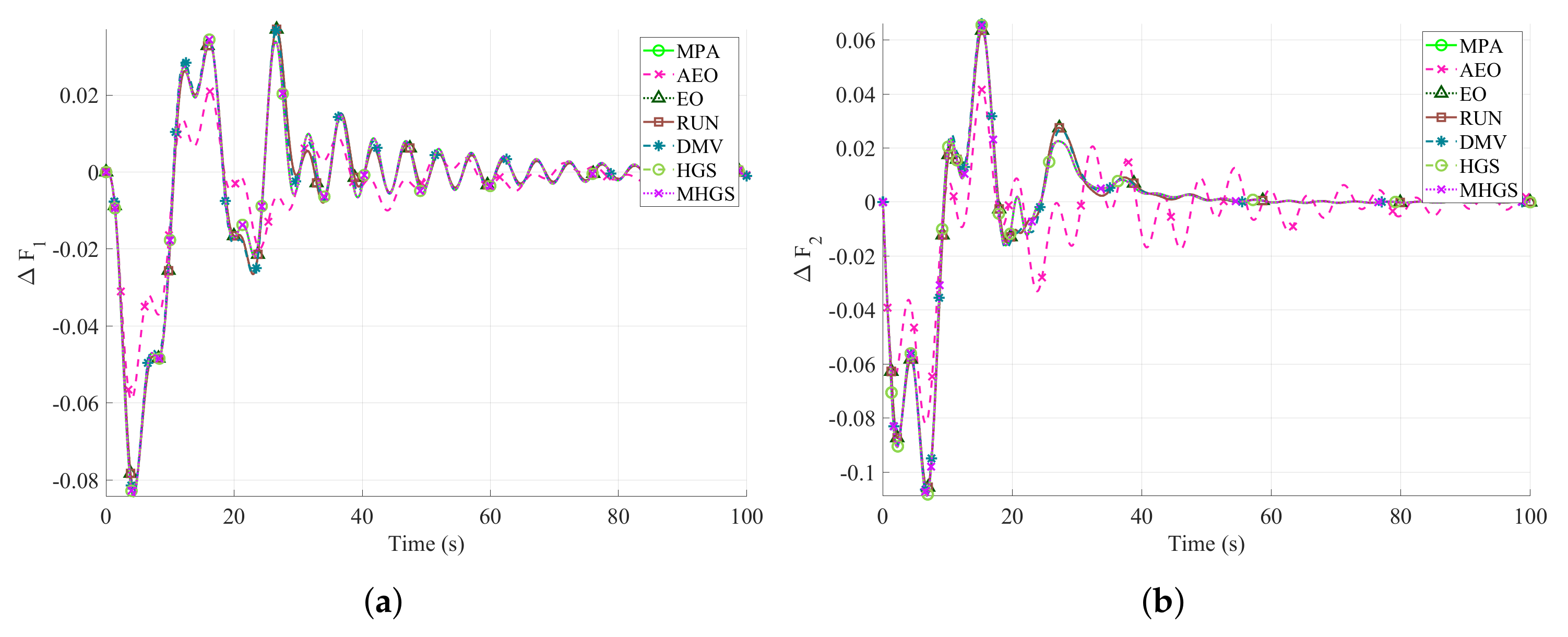
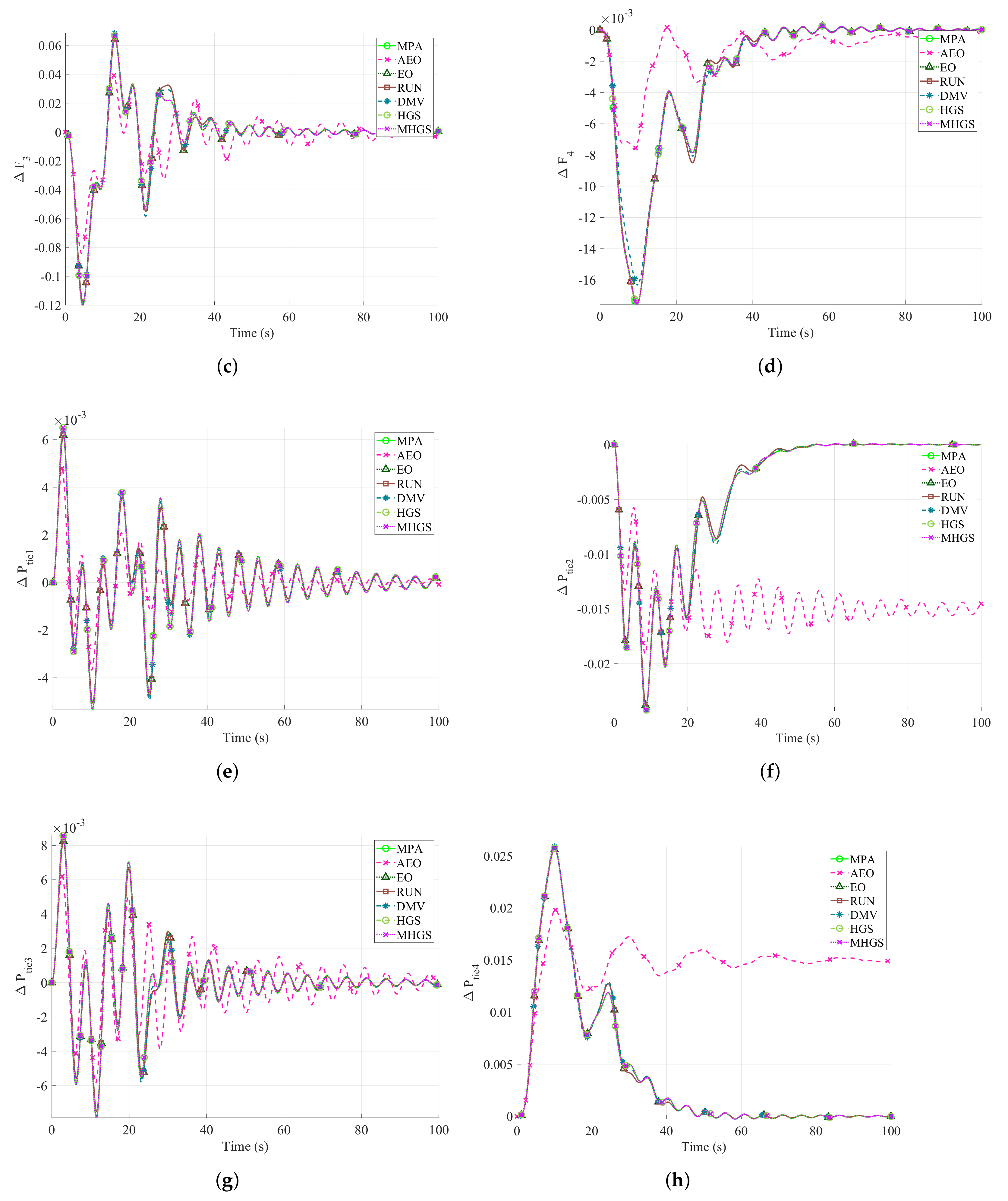
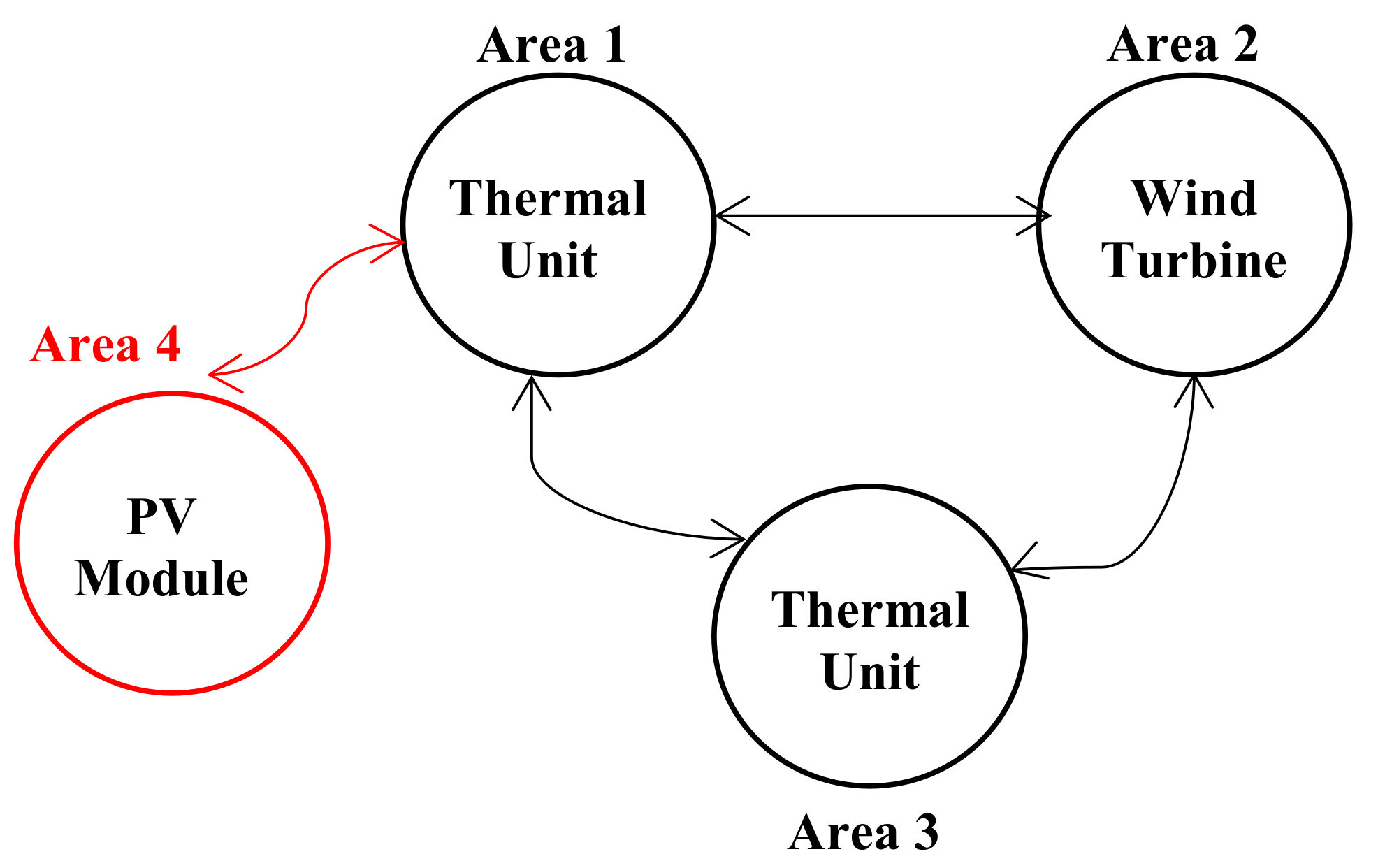
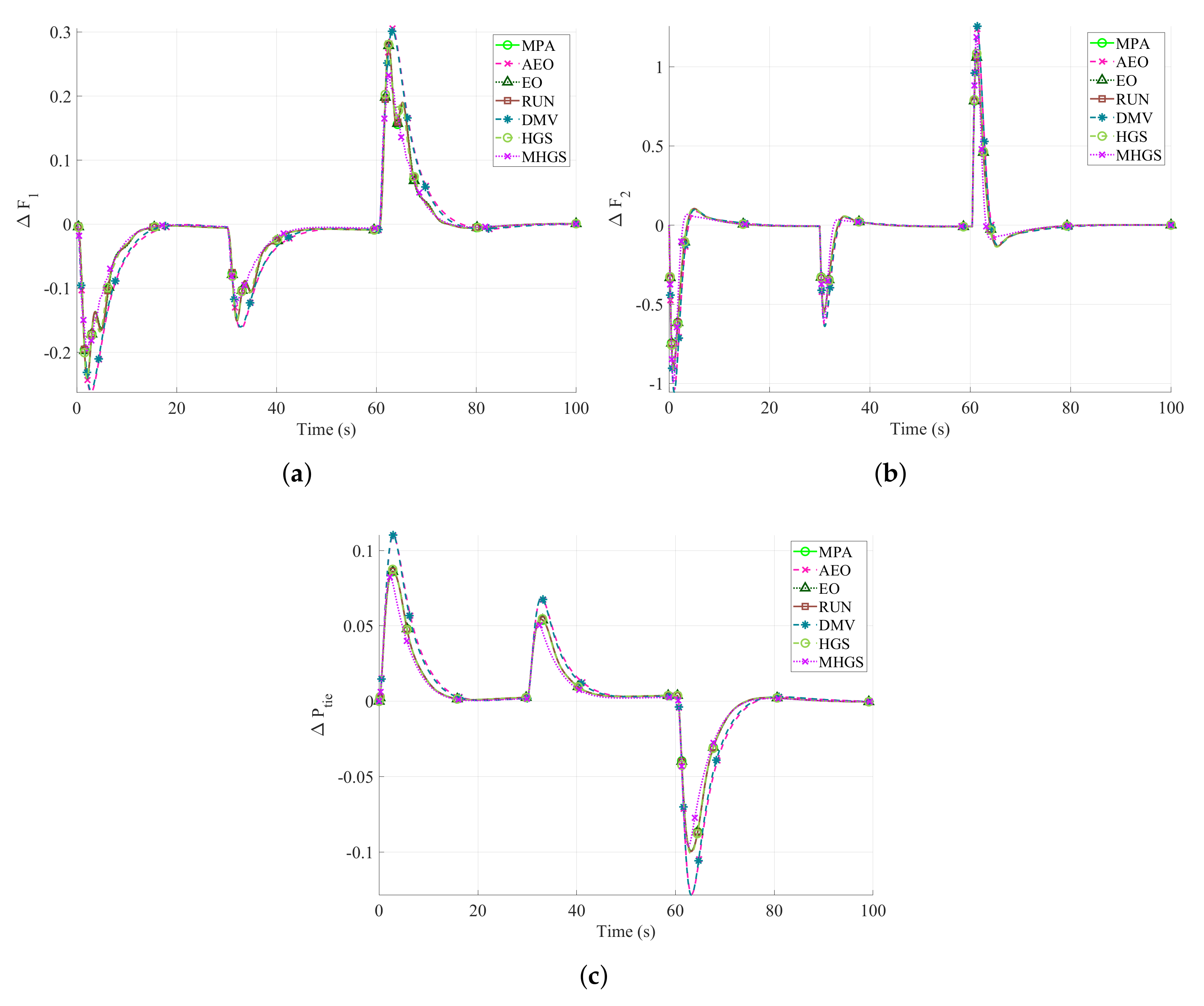
5.2. Four Interconnected Systems
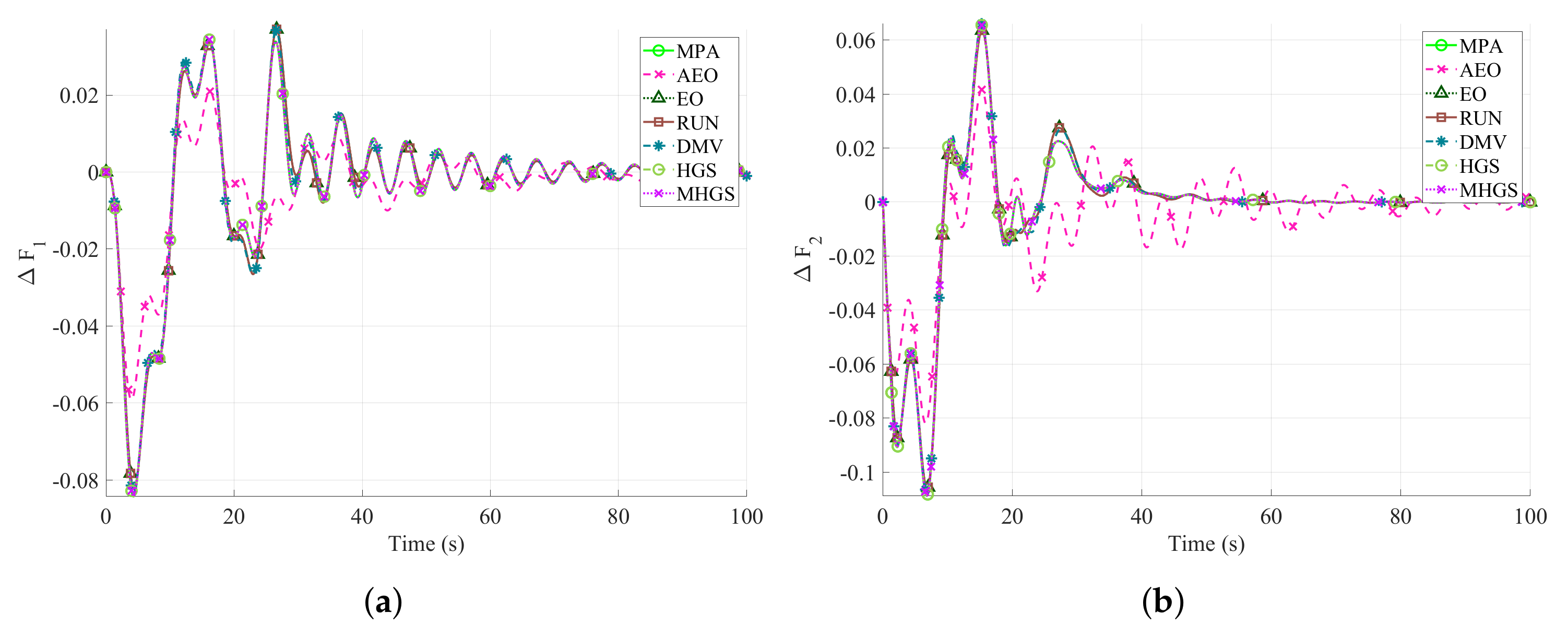
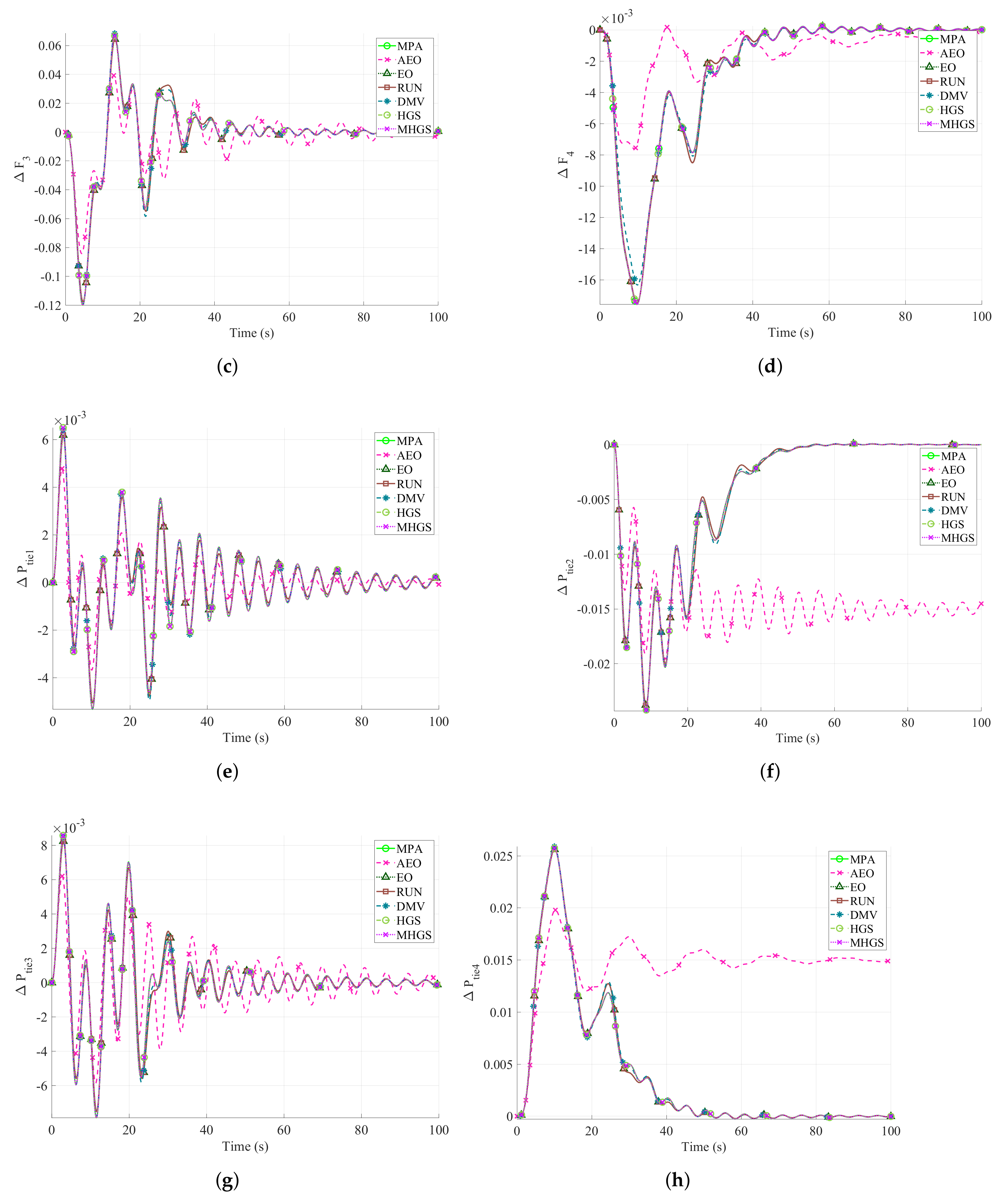
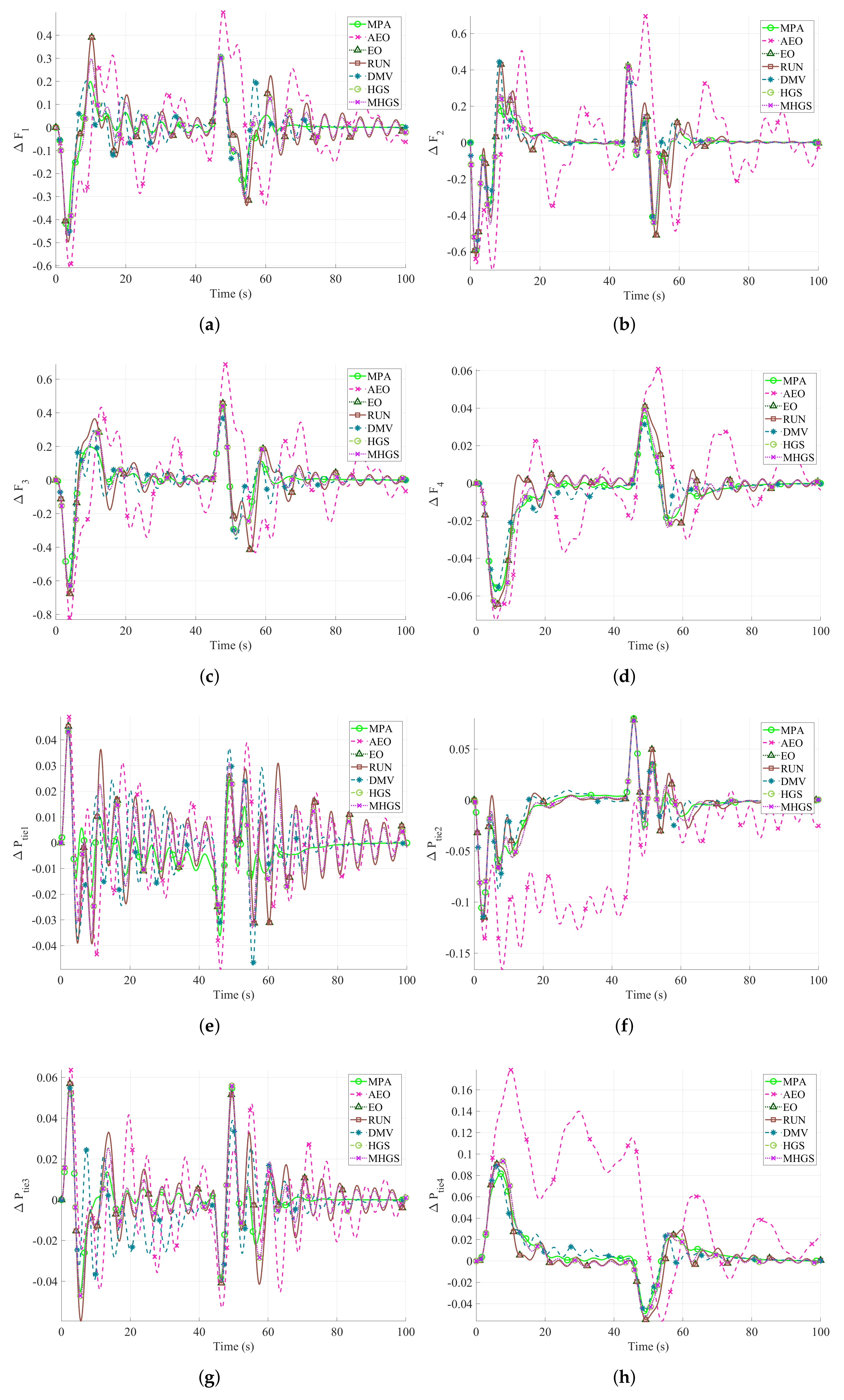
Robustness Evaluation under Variable Disturbance: Four Areas
6. Conclusions and Perspectives
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Elnozahy, A.; Ramadan, H.; Abo-Elyousr, F.K. Efficient metaheuristic Utopia-based multi-objective solutions of optimal battery-mix storage for microgrids. J. Clean. Prod. 2021, 303, 127038. [Google Scholar] [CrossRef]
- Bagheri, A.; Jabbari, A.; Mobayen, S. An intelligent ABC-based terminal sliding mode controller for load-frequency control of islanded micro-grids. Sustain. Cities Soc. 2021, 64, 102544. [Google Scholar] [CrossRef]
- Benmouna, A.; Becherif, M.; Boulon, L.; Dépature, C.; Ramadan, H.S. Efficient experimental energy management operating for FC/battery/SC vehicles via hybrid Artificial Neural Networks-Passivity Based Control. Renew. Energy 2021, 178, 1291–1302. [Google Scholar] [CrossRef]
- Fu, C.; Wang, C.; Shi, D. An alternative method for mitigating impacts of communication delay on load frequency control. Int. J. Electr. Power Energy Syst. 2020, 119, 105924. [Google Scholar] [CrossRef]
- Dev, A.; Anand, S.; Sarkar, M.K. Adaptive Super Twisting Sliding Mode Load Frequency Control for an Interconnected Power Network with Nonlinear Coupling between Control Areas. IFAC-PapersOnLine 2020, 53, 350–355. [Google Scholar] [CrossRef]
- Bevrani, H. Robust Power System Frequency Control; Springer: New York, NY, USA, 2009. [Google Scholar]
- Saxena, S.; Hote, Y.V. Decentralized PID load frequency control for perturbed multi-area power systems. Int. J. Electr. Power Energy Syst. 2016, 81, 405–415. [Google Scholar] [CrossRef]
- Bošković, M.Č.; Šekara, T.B.; Rapaić, M.R. Novel tuning rules for PIDC and PID load frequency controllers considering robustness and sensitivity to measurement noise. Int. J. Electr. Power Energy Syst. 2020, 114, 105416. [Google Scholar] [CrossRef]
- Ouassaid, M.; Maaroufi, M.; Cherkaoui, M. Observer-based nonlinear control of power system using sliding mode control strategy. Electr. Power Syst. Res. 2012, 84, 135–143. [Google Scholar] [CrossRef]
- Xu, H.; Miao, S.; Zhang, C.; Shi, D. Optimal placement of charging infrastructures for large-scale integration of pure electric vehicles into grid. Int. J. Electr. Power Energy Syst. 2013, 53, 159–165. [Google Scholar] [CrossRef]
- Kazemy, A.; Hajatipour, M. Event-triggered load frequency control of Markovian jump interconnected power systems under denial-of-service attacks. Int. J. Electr. Power Energy Syst. 2021, 133, 107250. [Google Scholar] [CrossRef]
- Da Silva, G.S.; de Oliveira, E.J.; de Oliveira, L.W.; de Paula, A.N.; Ferreira, J.S.; Honório, L.M. Load frequency control and tie-line damping via virtual synchronous generator. Int. J. Electr. Power Energy Syst. 2021, 132, 107108. [Google Scholar] [CrossRef]
- Velusami, S.; Chidambaram, I. Decentralized biased dual mode controllers for load frequency control of interconnected power systems considering GDB and GRC non-linearities. Energy Convers. Manag. 2007, 48, 1691–1702. [Google Scholar] [CrossRef]
- Mohamed, T.H.; Alamin, M.A.M.; Hassan, A.M. A novel adaptive load frequency control in single and interconnected power systems. Ain Shams Eng. J. 2021, 12, 1763–1773. [Google Scholar] [CrossRef]
- Guo, J. Application of a novel adaptive sliding mode control method to the load frequency control. Eur. J. Control 2021, 57, 172–178. [Google Scholar] [CrossRef]
- Arivoli, R.; Chidambaram, I. CPSO based LFC for a two-area power system with GDB and GRC nonlinearities interconnected through TCPS in series with the tie-line. Int. J. Comput. Appl. 2012, 38, 1–10. [Google Scholar]
- Arya, Y.; Kumar, N. Design and analysis of BFOA-optimized fuzzy PI/PID controller for AGC of multi-area traditional/restructured electrical power systems. Soft Comput. 2017, 21, 6435–6452. [Google Scholar] [CrossRef]
- Sahu, R.K.; Gorripotu, T.S.; Panda, S. A hybrid DE–PS algorithm for load frequency control under deregulated power system with UPFC and RFB. Ain Shams Eng. J. 2015, 6, 893–911. [Google Scholar] [CrossRef] [Green Version]
- Shakibjoo, A.D.; Moradzadeh, M.; Moussavi, S.Z.; Mohammadzadeh, A.; Vandevelde, L. Load frequency control for multi-area power systems: A new type-2 fuzzy approach based on Levenberg–Marquardt algorithm. ISA Trans. 2021, in press. [Google Scholar] [CrossRef]
- Dokht Shakibjoo, A.; Moradzadeh, M.; Moussavi, S.Z.; Vandevelde, L. A novel technique for load frequency control of multi-area power systems. Energies 2020, 13, 2125. [Google Scholar] [CrossRef]
- Khokhar, B.; Dahiya, S.; Parmar, K.S. Load frequency control of a microgrid employing a 2D Sine Logistic map based chaotic sine cosine algorithm. Appl. Soft Comput. 2021, 107564. [Google Scholar] [CrossRef]
- Vedik, B.; Kumar, R.; Deshmukh, R.; Verma, S.; Shiva, C.K. Renewable Energy-Based Load Frequency Stabilization of Interconnected Power Systems Using Quasi-Oppositional Dragonfly Algorithm. J. Control Autom. Electr. Syst. 2021, 32, 227–243. [Google Scholar] [CrossRef]
- Oshnoei, S.; Oshnoei, A.; Mosallanejad, A.; Haghjoo, F. Novel load frequency control scheme for an interconnected two-area power system including wind turbine generation and redox flow battery. Int. J. Electr. Power Energy Syst. 2021, 130, 107033. [Google Scholar] [CrossRef]
- Mohapatra, T.K.; Dey, A.K.; Sahu, B.K. Employment of quasi oppositional SSA-based two-degree-of-freedom fractional order PID controller for AGC of assorted source of generations. IET Gener. Transm. Distrib. 2020, 14, 3365–3376. [Google Scholar] [CrossRef]
- Sharma, Y.; Saikia, L.C. Automatic generation control of a multi-area ST–Thermal power system using Grey Wolf Optimizer algorithm based classical controllers. Int. J. Electr. Power Energy Syst. 2015, 73, 853–862. [Google Scholar] [CrossRef]
- Gozde, H.; Taplamacioglu, M.C.; Kocaarslan, I. Comparative performance analysis of Artificial Bee Colony algorithm in automatic generation control for interconnected reheat thermal power system. Int. J. Electr. Power Energy Syst. 2012, 42, 167–178. [Google Scholar] [CrossRef]
- Raju, M.; Saikia, L.C.; Sinha, N. Automatic generation control of a multi-area system using ant lion optimizer algorithm based PID plus second order derivative controller. Int. J. Electr. Power Energy Syst. 2016, 80, 52–63. [Google Scholar] [CrossRef]
- Khalghani, M.R.; Khooban, M.H.; Mahboubi-Moghaddam, E.; Vafamand, N.; Goodarzi, M. A self-tuning load frequency control strategy for microgrids: Human brain emotional learning. Int. J. Electr. Power Energy Syst. 2016, 75, 311–319. [Google Scholar] [CrossRef]
- Guha, D.; Roy, P.K.; Banerjee, S. Binary bat algorithm applied to solve MISO-type PID-SSSC-based load frequency control problem. Iran. J. Sci. Technol. Trans. Electr. Eng. 2019, 43, 323–342. [Google Scholar] [CrossRef]
- Sobhy, M.A.; Abdelaziz, A.Y.; Hasanien, H.M.; Ezzat, M. Marine predators algorithm for load frequency control of modern interconnected power systems including renewable energy sources and energy storage units. Ain Shams Eng. J. 2021, 12, 3843–3857. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Rout, U.K. DE optimized parallel 2-DOF PID controller for load frequency control of power system with governor dead-band nonlinearity. Int. J. Electr. Power Energy Syst. 2013, 49, 19–33. [Google Scholar] [CrossRef]
- Deng, W.; Xu, J.; Zhao, H. An improved ant colony optimization algorithm based on hybrid strategies for scheduling problem. IEEE access 2019, 7, 20281–20292. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, H.; Li, K.; Lin, Z.; Yang, J.; Shen, X.L. A hybrid particle swarm optimization algorithm using adaptive learning strategy. Inf. Sci. 2018, 436, 162–177. [Google Scholar] [CrossRef]
- Aydilek, I.B. A hybrid firefly and particle swarm optimization algorithm for computationally expensive numerical problems. Appl. Soft Comput. 2018, 66, 232–249. [Google Scholar] [CrossRef]
- Tubishat, M.; Idris, N.; Shuib, L.; Abushariah, M.A.; Mirjalili, S. Improved Salp Swarm Algorithm based on opposition based learning and novel local search algorithm for feature selection. Expert Syst. Appl. 2020, 145, 113122. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Chattopadhyay, P.K. Hybrid differential evolution with biogeography-based optimization for solution of economic load dispatch. IEEE Trans. Power Syst. 2010, 25, 1955–1964. [Google Scholar] [CrossRef]
- Morsali, J.; Zare, K.; Hagh, M.T. Comparative performance evaluation of fractional order controllers in LFC of two-area diverse-unit power system with considering GDB and GRC effects. J. Electr. Syst. Inf. Technol. 2018, 5, 708–722. [Google Scholar] [CrossRef]
- Arya, Y.; Kumar, N. BFOA-scaled fractional order fuzzy PID controller applied to AGC of multi-area multi-source electric power generating systems. Swarm Evol. Comput. 2017, 32, 202–218. [Google Scholar] [CrossRef]
- Zamani, A.; Barakati, S.M.; Yousofi-Darmian, S. Design of a fractional order PID controller using GBMO algorithm for load–frequency control with governor saturation consideration. ISA Trans. 2016, 64, 56–66. [Google Scholar] [CrossRef]
- Morsali, J.; Zare, K.; Hagh, M.T. MGSO optimised TID-based GCSC damping controller in coordination with AGC for diverse-GENCOs multi-DISCOs power system with considering GDB and GRC non-linearity effects. IET Gener. Transm. Distrib. 2017, 11, 193–208. [Google Scholar] [CrossRef]
- Kumari, S.; Shankar, G. Novel application of integral-tilt-derivative controller for performance evaluation of load frequency control of interconnected power system. IET Gener. Transm. Distrib. 2018, 12, 3550–3560. [Google Scholar] [CrossRef]
- Wang, Y.; Qi, D.; Zhang, J. Multi-objective optimization for voltage and frequency control of smart grids based on controllable loads. Global Energy Interconnect. 2021, 4, 136–144. [Google Scholar] [CrossRef]
- Oshnoei, A.; Khezri, R.; Muyeen, S.; Blaabjerg, F. On the contribution of wind farms in automatic generation control: Review and new control approach. Appl. Sci. 2018, 8, 1848. [Google Scholar] [CrossRef] [Green Version]
- Debbarma, S.; Dutta, A. Utilizing electric vehicles for LFC in restructured power systems using fractional order controller. IEEE Trans. Smart Grid 2016, 8, 2554–2564. [Google Scholar] [CrossRef]
- Hasanien, H.M. Whale optimisation algorithm for automatic generation control of interconnected modern power systems including renewable energy sources. IET Gener. Transm. Distrib. 2018, 12, 607–614. [Google Scholar] [CrossRef]
- Hasanien, H.M.; Muyeen, S. Affine projection algorithm based adaptive control scheme for operation of variable-speed wind generator. IET Gener. Transm. Distrib. 2015, 9, 2611–2616. [Google Scholar] [CrossRef] [Green Version]
- Tawfiq, K.B.; Mansour, A.S.; Ramadan, H.S.; Becherif, M.; El-Kholy, E. Wind energy conversion system topologies and converters: Comparative review. Energy Procedia 2019, 162, 38–47. [Google Scholar] [CrossRef]
- Wang, L.; Singh, C.; Kusiak, A. Wind Power Systems; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Abd-Elazim, S.; Ali, E. Load frequency controller design of a two-area system composing of PV grid and thermal generator via firefly algorithm. Neural Comput. Appl. 2018, 30, 607–616. [Google Scholar] [CrossRef]
- Yousri, D.; Babu, T.S.; Allam, D.; Ramachandaramurthy, V.; Beshr, E.; Eteiba, M. Fractional Chaos Maps with Flower Pollination Algorithm for Partial Shading Mitigation of Photovoltaic Systems. Energies 2019, 12, 3548. [Google Scholar] [CrossRef] [Green Version]
- Al-Dhaifallah, M.; Nassef, A.M.; Rezk, H.; Nisar, K.S. Optimal parameter design of fractional order control based INC-MPPT for PV system. Sol. Energy 2018, 159, 650–664. [Google Scholar] [CrossRef]
- Yousri, D.; Babu, T.S.; Fathy, A. Recent methodology based Harris Hawks optimizer for designing load frequency control incorporated in multi-interconnected renewable energy plants. Sustain. Energy Grids Netw. 2020, 22, 100352. [Google Scholar] [CrossRef]
- Özdemir, M.; Öztürk, D. Comparative performance analysis of optimal PID parameters tuning based on the optics inspired optimization methods for automatic generation control. Energies 2017, 10, 2134. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Chen, H.; Heidari, A.A.; Gandomi, A.H. Hunger games search: Visions, conception, implementation, deep analysis, perspectives, and towards performance shifts. Expert Syst. Appl. 2021, 177, 114864. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Mirjalili, S.; Gandomi, A.H. Marine Predators Algorithm: A nature-inspired metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, L.; Zhang, Z. Artificial ecosystem-based optimization: A novel nature-inspired meta-heuristic algorithm. Neural Comput. Appl. 2020, 32, 1–43. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Stephens, B.; Mirjalili, S. Equilibrium optimizer: A novel optimization algorithm. Knowl.-Based Syst. 2020, 191, 105190. [Google Scholar] [CrossRef]
- Ahmadianfar, I.; Heidari, A.A.; Gandomi, A.H.; Chu, X.; Chen, H. RUN beyond the metaphor: An efficient optimization algorithm based on Runge Kutta method. Expert Syst. Appl. 2021, 181, 115079. [Google Scholar] [CrossRef]
- Rizk-Allah, R.M.; Hassanien, A.E. A movable damped wave algorithm for solving global optimization problems. Evol. Intell. 2019, 12, 49–72. [Google Scholar] [CrossRef]
- Fathy, A.; Alharbi, A.G. Recent Approach Based Movable Damped Wave Algorithm for Designing Fractional-Order PID Load Frequency Control Installed in Multi-Interconnected Plants With Renewable Energy. IEEE Access 2021, 9, 71072–71089. [Google Scholar] [CrossRef]
- Fathy, A.; Kassem, A.M. Antlion optimizer-ANFIS load frequency control for multi interconnected plants comprising photovoltaic and wind turbine. ISA Trans. 2019, 87, 282–296. [Google Scholar] [CrossRef]
- Ali, H.H.; Kassem, A.M.; Al-Dhaifallah, M.; Fathy, A. Multi-verse optimizer for model predictive load frequency control of hybrid multi-interconnected plants comprising renewable energy. IEEE Access 2020, 8, 114623–114642. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Para | Algorithms | ||||||
|---|---|---|---|---|---|---|---|
| MPA | AEO | EO | RUN | DMV | HGS | MHGS | |
| ITAE | |||||||
| ITSE | |||||||
| IAE | |||||||
| Specifications | ||||||||
|---|---|---|---|---|---|---|---|---|
| Algs | RiseTime | SettlingTime | SettlingMin | SettlingMax | Overshoot | Undershoot | Peak | PeakTime |
| MPA AEO EO RUN DMV HGS MHGS | ||||||||
| MPA AEO EO RUN DMV HGS MHGS | ||||||||
| P | ||||||||
| MPA AEO EO RUN DMV HGS MHGS | ||||||||
| Para | Algorithms | ||||||
|---|---|---|---|---|---|---|---|
| MPA | AEO | EO | RUN | DMV | HGS | MHGS | |
| ITAE | |||||||
| ITSE | |||||||
| IAE | |||||||
| Specifications | ||||||||
|---|---|---|---|---|---|---|---|---|
| Algs | RiseTime | Settling Time | Settling Min | Settling Max | Overshoot | Undershoot | Peak | PeakTime |
| MPA AEO EO RUN DMV HGS MHGS | ||||||||
| MPA AEO EO RUN DMV HGS MHGS | ||||||||
| MPA AEO EO RUN DMV HGS MHGS | ||||||||
| MPA AEO EO RUN DMV HGS MHGS | ||||||||
| P | ||||||||
| MPA AEO EO RUN DMV HGS MHGS | ||||||||
| P | ||||||||
| MPA AEO EO RUN DMV HGS MHGS | ||||||||
| P | ||||||||
| MPA AEO EO RUN DMV HGS MHGS | ||||||||
| P | ||||||||
| MPA AEO EO RUN DMV HGS MHGS | ||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fathy, A.; Yousri, D.; Rezk, H.; Thanikanti, S.B.; Hasanien, H.M. A Robust Fractional-Order PID Controller Based Load Frequency Control Using Modified Hunger Games Search Optimizer. Energies 2022, 15, 361. https://doi.org/10.3390/en15010361
Fathy A, Yousri D, Rezk H, Thanikanti SB, Hasanien HM. A Robust Fractional-Order PID Controller Based Load Frequency Control Using Modified Hunger Games Search Optimizer. Energies. 2022; 15(1):361. https://doi.org/10.3390/en15010361
Chicago/Turabian StyleFathy, Ahmed, Dalia Yousri, Hegazy Rezk, Sudhakar Babu Thanikanti, and Hany M. Hasanien. 2022. "A Robust Fractional-Order PID Controller Based Load Frequency Control Using Modified Hunger Games Search Optimizer" Energies 15, no. 1: 361. https://doi.org/10.3390/en15010361
APA StyleFathy, A., Yousri, D., Rezk, H., Thanikanti, S. B., & Hasanien, H. M. (2022). A Robust Fractional-Order PID Controller Based Load Frequency Control Using Modified Hunger Games Search Optimizer. Energies, 15(1), 361. https://doi.org/10.3390/en15010361