Abstract
Automatic generation control (AGC) is primarily responsible for ensuring the smooth and efficient operation of an electric power system. The main goal of AGC is to keep the operating frequency under prescribed limits and maintain the interchange power at the intended level. Therefore, an AGC system must be supplemented with modern and intelligent control techniques to provide adequate power supply. This paper provides a comprehensive overview of various AGC models in diverse configurations of the power system. Initially, the history of power system AGC models is explored and the basic operation of AGC in a multi-area interconnected power system is presented. An in-depth analysis of various control methods used to mitigate the AGC issues is provided. Application of fast-acting energy storage devices, high voltage direct current (HVDC) interconnections, and flexible AC transmission systems (FACTS) devices in the AGC systems are investigated. Furthermore, AGC systems employed in different renewable energy generation systems are overviewed and are summarized in tabulated form. AGC techniques in different configurations of microgrid and smart grid are also presented in detail. A thorough overview of various AGC issues in a deregulated power system is provided by considering the different contract scenarios. Moreover, AGC systems with an additional objective of economic dispatch is investigated and an overview of worldwide AGC practices is provided. Finally, the paper concludes with an emphasis on the prospective study in the field of AGC.
1. Introduction
The power system primarily ensures its stable and safe operation by maintaining a constant equilibrium between power production and load demands. Such an equilibrium is maintained to hold the frequency of the network within the appropriate limits as defined by the grid codes. In real-time operation, there is often a persistent variation in the load demand that creates a relative balance between the load and generation. This relative balance always influences the system frequency and subsequently affects the security of the power system operation. The frequency of the power system is mainly controlled using two control loops, namely primary and secondary. The primary control loop prevents instant variations in the frequency before triggering the frequency protection switches. It is provided through the governor droops that typically give rise to the steady-state error. Secondary control, also termed automatic generation control (AGC) or load frequency control (LFC), is implemented to regulate the system frequency to its nominal value in the power system network. The AGC operates with the objectives of: (a) regulating the steady-state system frequency to its nominal value, (b) maintaining the tie-line power flow close to its scheduled value, and (c) keep overshoot and settling time within the acceptable ranges. To accomplish these objectives, a linear equation called area control error (ACE) is used, which is associated with two main focal variables, namely frequency variance, and tie-line power exchange. AGC uses ACE as a monitoring signal and sets it to zero in the event of any disturbance or variation in system loads.
The modern power infrastructure is currently undergoing significant transformations due to: (a) the integration of large-scale renewable energy generation sources, (b) introduction of new concepts in the power system like microgrids and smart grids and deregulation phenomena, and (c) digitalization’s of the control structures in the power system network. The integration of increasingly intermittent renewable energy sources (RESs) such as wind and photovoltaic power plants results in uncertainty of active power productions, thereby determines the frequency variations. Furthermore, multiple physical, environmental, and operational constraints are emerging with numerous micro-energy sources that has shaped the operation of power systems in a different way and therefore poses various challenges to the secure power system operation. Besides this, the modern power grid is currently transitioning from a vertically integrated scenario to a deregulated power system, which requires the unbundling of power system elements into horizontal and vertical parts. This has increased the rivalry among utilities, resulting in free transmission access and thus raising the probability of transmission congestions. Moreover, the advent of various complicated power system elements with different capacities and consumption rates has further changed the dynamics of the power system network. In such circumstances, analysis of frequency control strategies is essential to cope with the above-mentioned challenges in the power system network. In other words, an AGC service is required that not only guarantees reliability, security, and economic operation of the system, but also offers an innovative and enhanced control version that meets all the requirements of the future power system. In this respect, different control approaches for AGC are proposed in the literature, which are divided into four categories: (a) classical controls, which are mainly based on conventional proportional-integral-derivative (PID) controllers; (b) modern controls including model predictive controls, adaptive and sliding mode controls, optimal controls, and digital controls; (c) intelligent control such as fuzzy logic and artificial neural networks; and (d) soft computing control approaches. In this respect, many literature surveys are published on different control philosophies of AGC operation regarding parametric variations/uncertainties, non-linearities, and different system load characteristics.
For instance, the authors in [1,2] briefly overviewed different frequency control schemes for AGC problems based on classical controls, optimal controls, adaptive and self-tunning, and artificial intelligence control methods. A comparative study is provided that summarizes the advantages and disadvantages of each proposed method based on different system load characteristics and generation profiles of various energy sources. However, the use of AGC in non-conventional power systems including the smart grid, and the complications related to the operation of AGC in non-linear power system models are not explored. In [3] the authors attempted to offer a complete survey on AGC regarding its application in conventional power systems, distribution generation systems, and a different configuration of the microgrid system. Further, the analysis also revealed the application of different energy storage devices, flexible AC transmission systems (FACTS) devices, and high voltage direct current (HVDC) links in the AGC system. However, the surveys still lack some contemporary regulation schemes and optimization approaches for AGC, such as deep learning and reinforcement learning approaches. The same approach regarding the review on AGC is observed in [4], which further described various challenges associated with the integration of fast energy storage systems, FACTS devices, wind-diesel power plant, and photovoltaic (PV) systems into the AGC schemes. The authors in [5] provided an in-depth literature review on different perspectives and challenges of AGC in both traditional and future power systems. Here, the use of AGC in the diverse configuration of the power system is firstly reviewed and applications of different intelligent and modern control methods are enlightened. In [6], the authors presented a detailed literature review on different methodologies for integrating battery energy storage systems (BESSs) into AGC schemes due to their rapid response and high energy density in terms of BES scale, ownership responsibility, and collaboration with the system operator. Various challenges in the AGC of future smart power systems are reviewed in [7], where different AGC methods incorporating the BESS-based electrical vehicles (EVs), large-scale BESS, residential, and non-residential BESS are analyzed and tested to check its effectiveness in recovering the trembled frequency response. The authors in [8] explained the application and challenges of different AGC schemes in wind energy-based power plants, which affect the AGC regulations due to its low inertial and unsatisfactory primary performance. Further, the survey explored variable speed wind turbines and suitable frequency control techniques that can support the frequency contingencies. In [9], the authors focused on various intelligent AGC schemes and their implementation in renewable and distributed generation energy systems.
The frequency regulation of microgrids in autonomous mode is very critical as the generating sources are mostly renewable-based and therefore highly intermittent. Various control strategies employed for frequency regulation in a standalone microgrid are critically reviewed in [10]. Furthermore, different non-conventional frequency control methods, such as droop control, model predictive control, fuzzy logic control, H∞ base control, sliding mode, and demand-side control are analyzed and their implementation procedure in the microgrids are presented. The authors in [11] surveyed various robust frequency regulation strategies in a multi-area interconnected power system concerning technical and economical constraints along with the effect of RESs to attain a new type of collaboration between system performance, security, and dynamic robustness. The vertically integrated power system is now shifted towards the deregulated power system. Consequently, the analysis of the frequency control schemes in deregulated power networks is becoming a significant part of the power system operation and reliability. The authors in [12] provided an in-depth review of various deregulated power systems, their market structures, and contract agreements. Further, various traditional frequency controllers, such as I, PI, PID, robust and intelligent controllers for single and multi-area restructured power systems are reviewed and compared by considering their advantages and drawbacks. Likewise, an exhaustive literature survey on the application of AGC in different market scenarios of a deregulated power system considering several conventional and renewable energy sources is presented in [13]. Here, different AGC regulators including classical, modern, and intelligent controllers are reviewed and compared in terms of their transient and dynamic responses during sudden load perturbation and in the presence of different system parametric variations. All aforementioned reviews are listed in Table 1. In Table 1, “✓” supports the inclusion of a feature, while “✗” stands for the function not being reviewed in the referred study. Even though the above-mentioned surveys presented a comprehensive work on AGC schemes, they lack in providing an aggregating study on:

Table 1.
Summary of some generic state-of-the-art work on AGC.
- Modern AGC techniques in present and in future smart power systems that can incorporate renewable energy sources, different fast energy storage devices, HVDC, and FACTS devices.
- Intelligent and pattern recognition-based AGC techniques that can handle non-linearities, parametric variations, uncertain states in demand identifications, and dynamics of the different loads. Furthermore, different virtual inertial controllers (VIC), which can support and improve the inertial response of renewable energy-based AGC systems.
- AGC schemes in different configurations of microgrids including stand-alone single area and multiple area microgrids and support the integration of non-dispatchable and high intermittent distributed generation sources.
- AGC techniques in smart grids, which incorporate and improve different features including demand-side response, data forgery attacks, and two-way communications.
- Efficient AGC models in a deregulated framework that can enhance the economic efficiency and stability of the restructured power market.
- AGC techniques in conjunction with the Economic Dispatch (ED) factor to improve its economic efficiency.
- Industrial practices of different AGC models around the world to explore and analyze different issues related to its practical implementation in the field.
Considering the aforementioned issues, the main contributions of this review paper are:
- The developmental history of AGC models in traditional and renewable energy power systems is explored, which considers various constraints in performing the frequency control analysis. These constraints include generation rate constraint (GRC) and governor dead band (GDB) nonlinearities, parametric variations, inertial response, time delay problems, observability of state variables, and other stability issues.
- The general concept of AGC models in a multi-area interconnected power system is explored and different objective functions, which are based on several criteria and used to eliminate the area control errors, are presented from the literature.
- A state-of-the-art study of AGC schemes, focused on classical and modern control theories, is presented for current and future smart power systems. Furthermore, various intelligent AGC schemes based on fuzzy logic and artificial neural networks are explored and various soft computing control algorithms are comprehensively analyzed. All these control methods are critically compared using the tabular method showing their merits and demerits.
- The article addresses several frequency management systems integrating small and large renewable energy sources into the power grid for frequency regulation purposes. Further, a comprehensive literature review on AGC strategies incorporating various energy storage systems (ESSs), HVDC interconnections, and FACTS devices is provided.
- A detailed overview of the AGC schemes in various microgrid configurations is presented and summarized for comparison in a tabulated form. Further, AGC approaches integrating various aspects of the smart grid are illustrated.
- The concept of a deregulated power system is addressed and the application and challenges associated with AGC implementation in different contract scenarios are presented.
- Different AGC schemes in conjunction with economic dispatch are reviewed from the literature and a detailed overview of worldwide AGC practices is provided to explore the industrial applications of AGC.
The article is organized as follows: Section 2 describes the history of the AGC schemes in different sets of power system models. The basic functioning of the AGC in multi-area power systems and the descriptions of the various objective functions are given in Section 3. Section 4 deals with the various configurations of the power system models associated with the AGC problems. The different control strategies used in the AGC operation are explained in Section 5. All the classical and modern control methods are discussed in Section 6. Likewise, Section 7 illustrates intelligent and soft computing control methods. AGC’s incorporating ESS, HVDCs, and Fact’s devices are presented in Section 8. Section 9 provides a comprehensive overview of different AGC schemes in renewable energy-based generation systems. AGC techniques in microgrid and smart grid are examined and overviewed in Section 10, while AGC schemes in deregulated power systems are analyzed in Section 11. AGC’s secondary objective is studied in Section 12. Section 13 includes the worldwide AGC practices and Section 14 presents the future scope of this paper. Finally, the paper concludes with major findings. Figure 1 depicts the pictorial description of our paper organization into sections. The acronyms used in this manuscript are listed in Appendix A.
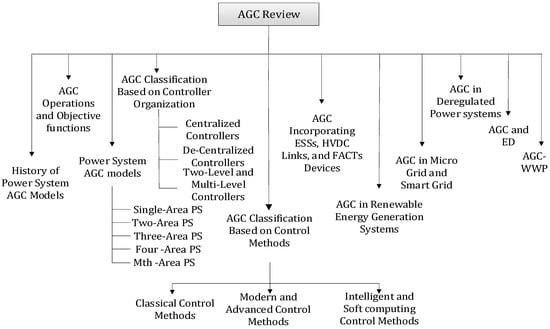
Figure 1.
Structure of the survey.
2. History of the Power System AGC Models
An electrical power system is a large-scale complex system with underlying non-linear behavior. Any mismatch between the load and generation deviates the system frequency from its pre-defined level, which is initially counteracted by the retained kinetic energy, and then the frequency is balanced through activating the primary reserves, however, it is not restored to its nominal level. The system frequency is regulated to its pre-defined level by AGC/LFC, which is mainly responsible to keep the balance between generation and load demands in real-time. AGC uses ACE as the control signal and regulates it to zero in the occurrence of any oscillations, due to the deviations in the system frequency and scheduled tie-line interchanges. In the course of AGC operation, various constraints were found and, as a result, different changes were made to address these constraints. This section outlines the history of the AGC model during its development stages. The ACE equation, integrating frequency deviations and inadvertent interchanges in the tie-lines, was initially derived by Cohn [14] in which the time error correction factor was added to enhance the massive power transfer control technique. Various guidelines on the dynamic modeling of AGC for power system models including steam, hydro, and nuclear power plants [15] were then studied and small signal stability analysis was carried out for the AGC model by analyzing the system response characteristics. From the analysis, it was found that implementing the AGC strategy following the linearized model for a non-linear power system does not guarantee system stability. Keeping this in view, different destabilizing effects on the AGC system due to the GDB and GRC non-linearities were then studied [16] and it was revealed that non-linearities continuously produce oscillations in the transient response of ACE. The invisibility of different system state variables and parameters estimation in an integrated power system was a major challenge for the power control system. Modern and adaptive control theories were introduced [17] to the AGC system for the estimations of varying system parameters and unknown state variables using local inputs and outputs.
Centralized control strategies were initially adopted for the AGC regulators [18], however, the computational burden, communication delays, and hefty storage requirements precluded its application on a large scale. The disadvantages of the centralized control strategies were overcome via the implementation of a decentralized control system [19], where a better dynamic response was achieved for a complex integrated power system by reducing the controller complexities and raising its potential for effective implementation in large scale power systems. Digital approaches [20] were developed for the AGC framework to keep the scale small, reduce its size, and make it more adaptable. In the digital control method, the ACE was collected in discrete mode by sampling the frequency variations and the tie-line power flow, which was then transmitted via telemetry. Throughout the development, the structure of the power system network was changing due to the dynamics of the different load, incorporation of various equipment’s, such as energy storage devices, HVDCs, and FACTS devices, and the integration of renewable energy sources into the conventional grid. This has further complicated the power system control problems, which required intelligent methods to have independence from the network models and do not need extensive knowledge of the problem. Intelligent controllers and computing-based algorithms [9,21] were introduced in this regard for the AGC to cope with such problems and increase network stability. Various impacts of renewables integration on the frequency control system were also studied [22]. Research on renewables integration proved that it has a non-zero impact on the system frequency, which becomes more significant in large-scale penetrations, where mounted inverters do not have a spinning mass and eventually minimizes system inertia. VICs were developed [23] to enhance the system inertial response and reduce the stability issues in the renewable energy-based AGC systems.
In the last decade, the shift from a vertically integrated electricity sector to a deregulated and dynamic energy market further modified the mode of power system operation. Holding these transformations in mind, a thorough study of AGC simulation and optimization after deregulation of the power system was conducted in [24]. In a restructured power network, there are Generation Companies (GENCOs), Transmission companies (TRANSCOs), and Distribution companies (DISCOs) with their policies. GENCOs sell their power at competitive rates to DISCOs. DISCOs in each area have the right to enter into a contract with GENCOs for power transactions, which are commonly known as bilateral transactions. Other types of transactions are poolco transactions, in which GENCOs of an area are bound to have a contract with DISCOs of the same area. All these deals are carried out under the supervision of ISOs. The AGC problem in such an environment was needed to accommodate all types of power contracts like unilateral, bilateral, and contacts with violations. Later on, a generalized AGC model was proposed [25] for a deregulated power structure to consider the possible outcome of bilateral agreements in the evolving generalized models. Augmented participation matrix (AGPM) was introduced, which defines the GENCO participation matrix agreed in consultation with DISCOS. In the AGPM matrix, the total number of rows and columns represents the strength of GENCO and DISCOS in the combined network. The suggested model helped visualize contracts and utilized new data signals in the strengths of the standard AGC systems.
3. AGC Operation and Objective Functions
The objective of determining the efficient, reliable, and stable power in an integrated power network is achieved via the implementation of AGC, which continuously monitors the load changes and alters the output of generators accordingly. In the AGC service, two variables need to be monitored consistently, namely tie-line interchanges and frequency variations. These two variables are combined to form one direct equation called ACE. To better understand the AGC operation, this section describes the basic functioning of AGC in a multi-area integrated power system and reviews some of the general-objective functions used in the literature to improve the AGC capacity. To analyze the AGC operation in an integrated multi-area power grid, consider a -bus electric power system, where having number of areas indexed by . Let denotes the set of lines, where For simplicity, each line of the power system is represented by the order pair , where The network admittance matrix comprising the electrical parameters and information is represented by where . The direction of the power flow is from , whenever and vice versa. There are N numbers of synchronous generators in each area indexed by and represented from , where represents the set of all generators in area and represent the specific generator in that particular area. Figure 2 presents the schematic diagram of a multi-area interconnected power grid. The general equation for the actual power exchange between area and , when is given as:
where, is the voltage magnitude of bus , is the (i j) entry of the system admittance matrix, and is the set of nodes in area with tie lines to nodes in area . The actual frequency of the area is given as:
where , in which represent the th generator inertial constant. ACE equation for area , denoted by is given as:
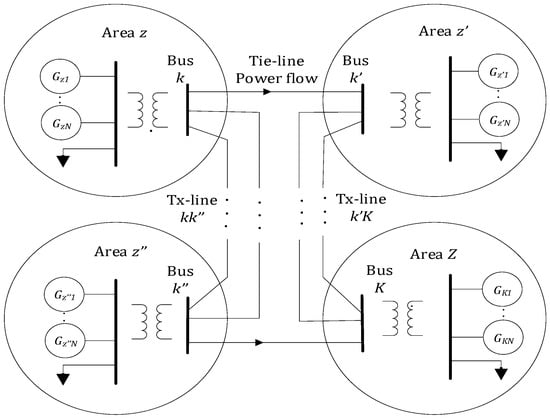
Figure 2.
Schematic diagram of multiple areas interconnected power system.
In Equation (3), and are the actual and scheduled power from area to respectively. The variance between these two parameters is called tie-line error and is represented by is the frequency bias constant for area , and is given as . Here, is the power system damping, is the governor droop and denotes the frequency deviation from the nominal value. In a situation of contradiction between load and generation, ACE has a value other than zero and so the AGC system’s primary objective is to restore the ACE to zero in each area of the power system network. To achieve this objective, the AGC regulator, simultaneously, changes the reference point () of each generator taking part in the AGC operations.
A suitable objective function with the required specifications and constraints is selected to tune the parameters of the AGC regulators. Based on various time-domain requirements, such as peak overshoot and undershoot, settling time, and steady-state error, an appropriate objective function is selected. In the literature, different objective functions have been used with the AGC regulators to incorporate the two variables of AGC, namely frequency variance and tie-line interchanges. The most widely used objective functions are integral absolute error (IAE), squared error integral (ISE), time integral multiplied by absolute error (ITAE), and time integral multiplied by squared error (ITSE). Performance analysis of the aforementioned objective functions in AGC of single and multi-area integrated power systems is evaluated in [26]. The objective functions are used to optimize the gains of the PID-based AGC regulator with one percent load changes in a single area. The analysis revealed that the performance of the objective functions varies with the size of the power system. Moreover, the analysis proved that ITSE based objective function assured the minimum peak undershoot for the PID-based AGC system, compared to other criteria. The dynamic performance of the I, PI, PID, integral double derivative (IDD), and fuzzy-IDD (F-IDD) controllers are compared using the ISE criterion in formulating the objective functions in [27]. Sensitivity analysis is conducted for the F-IDD controller to check its robustness for a diverse range of loading conditions. Further, the proposed controllers provided larger values of speed regulation parameters that helped in the realization of the easier and cheaper governor. Based on the aforementioned literature, the commonly used objective functions incorporating ACEs for number of areas are as follows:
where and represent the weight of the frequency and tie-line interchanges errors, respectively. Relying on the importance of the frequency variations and the tie-line interchanges in a particular location, an appropriate weight is assigned to that vicinity, which is comparably greater than the weight of the other control regions. Besides the single-objective optimization problems, researchers also targeted multi-objective optimization problems, which can be solved using the multi-objective optimization set of rules with clustering-based selection [28]. Here, the worst solution is decided in various non-dominated solutions discovered through the multi-objective optimization algorithm through the maximum value of each objective. The analysis proved that in terms of various performance indices, the controller primarily based at the multi-objective problems are more advanced than the controllers with a single-objective optimization problem. The multi-objective functions considering the damping of the frequency oscillation and settling time for both the frequency deviation and tie-line errors is given as:
The weight (w) of each term in an objective function is set by the significance of each term in the combined objective function [29]. The objective functions are then optimized properly to achieve the required target. Several classical (deterministic) and recent (nondeterministic) heuristic optimization techniques proposed in the literature are discussed in a later section.
4. Power System AGC Models
For the power system configuration, most of the research relies on linearized models of single-area and multi-area power systems. This section explains the different methods of frequency control in major power system models.
4.1. Single Area Power Systems
AGC models in single area power systems are proposed from the very early stages. Several research articles are published on the implementation of AGC in single area power systems [30,31]. The general concept of a single area power system with a variable structure controller was initially presented in the study [30]. The variable structure technique was utilized to achieve a robust and invariant control system. In current power systems consisting of single areas, vulnerabilities are increased due to the sudden upsurge in the load demands and volatile nature of generation sources, resulting in an impact of communication delay on LFCs. The authors in [31] have proposed an analytic-graphical-based PI-AGC regulator for a single area power system to deal with the destabilizing performance due to the communication delays. The basis of the idea is to extract the stability region in parameters space within the defined gains and phase margin. Analysis of the suggested control technique has shown that it provides a faster response to the disturbance rejection as compared to the other conventional controllers.
4.2. Two Area Power Systems
The AGC regulator for a two-area interconnected power grid has been analyzed in the literature [32,33,34,35]. A network where there are two areas of unequal power distribution with diverse electricity generation sources and a PID controller is suggested in [32] for the investigation of the AGC regulator. The controller of this system is tuned using three optimization methods, such as particle swarm optimization (PSO), Bacteria foraging Algorithm (BFA), and Improved PSO. To make processing faster, the IPSO process is modified and integrated into a constraint treatment method called a heavy search space compression technique, allowing an increase in the speed of optimization process. The capacity of the proposed IPSO dual area power grid is measured using 1% step loading in each control area. The two-area deregulated power grid integrating the double fed induction generator and capacitive energy storage systems to accomplish the frequency control of the AGC system for the thermal, gas, and hydroelectricity generation units are discussed in the literature [33]. The proposed control scheme allows the kinetic energy of the turbine to provide the specified inertial support between the onset and the end of the extreme load perturbations. Moreover, the desired transient output is achieved by the coordinated action of both CES/DFIG to arrest the initial dip in the region frequency and reduce the tie-line power deviations. In [34], the authors have nominated AGC controller for dual area power grid inculcating interline power flow controller (IPFC) in series with Redox Flow Batteries (RFB) to regulate the frequency oscillation arising in the power grid due to a variety of available apparatus with large capacities and the slow response. A BFO algorithm is employed and used to organize and optimize the control model parameters to enhance its efficiency.
4.3. Three Area Power Systems
AGC schemes consisting of three areas are best described by the researchers in [36,37,38]. An AGC with three unequal areas having thermal sources with single reheat and GRCs in each area is presented in [36]. A two degree of freedom (2DOF) regulator with IDD is implemented in the study and compared its performance with the 2DOF- PI, PID, and DD regulator to check its superiority. The control parameters are tuned using the cuckoo search algorithm. Besides, the efficiency of several FACTS devices, such as Static synchronous series compensator (SSSC), Thyristor controlled series capacitor (TCSC), Thyristor controlled phase shifter (TCPS), and Unified power flow controller (UPFC) with the proposed 2DOF controller is checked and it has been found that the required dynamic response is achieved with IPFC. An AGC for a three-area power grid consisting of a solar thermal power plant (STPP) in one of the areas is described in [37] considering the effect of GRCs. Here, the performance of I, PI, and PID controller is checked and compared using the grey wolf optimization technique with and without the STPP. The analysis showed that the proposed GWO-based PID regulator delivers improved dynamic progress in term of overshoot, settling time, and oscillation damping. The authors in [38] applied the QOHS algorithm to the AGC-based PID regulator in a three-area energy system with thermal units and with appropriate GRCs for each area. The proposed algorithm is developed by combining the concept of quasi-oppositional with the existing harmony search technique. In addition, to compile quickly, the proposed algorithm focuses on the characteristics of both opposing point predictions and the point of its mirror.
4.4. Four Area Power Systems
The research work on AGC systems with four control areas is presented in [19,39,40]. A type-2 fuzzy PID-based AGC system [40] is used in a four-area integrated power grid with non-linear behavior and uncertainties. In case of system uncertainties, type-2 fuzzy sets with a grade of fuzzy membership are believed to fit well. The parameters of the aforementioned control scheme are optimized using a big bang–big crunch algorithm having the characteristic of fast convergence speed. The proposed control framework is contrasted with the results of most recent regulators and showed better execution in regard to settling time and stability under the occurrence of load variations. An AGC model based on the sliding mode control for a four-area power system, which considers hydropower plants, reheat thermal gas, and non-reheat thermal gas is presented in [39]. The analysis showed that a better system reaction to discard distortions and marinate the necessary quality of control is achieved by the proposed control technique. A Sugeno fuzzy-logic-based AGC system for a multi-units four area deregulated power system is proposed in the literature [19] to further strengthen the bilateral behavior and access the AGC performance. The parameters of the proposed controller are set-up using the quasi-oppositional harmony search algorithm.
4.5. M-th Area Power Systems
AGC model for multiple area power systems, in which several areas are considered with multiple sources is briefly explained in [41]. A GA-based PI controller is used with the ITSE objective function. Also, the robustness margin of the system and transient performance are optimized concurrently to attain the optimal controller parameters. In [42], a multi-area power system with number of areas having reheat type steam turbine and gas turbine is proposed with appropriate GRC and GDB non-linearities. All the generators in a single area are simplified as one generating unit. Here, only the GAS turbine is included in the AGC operation, while steam turbine is available for generation of power. A fuzzy logic was utilized to develop an adaptive control technique and an algorithm for the parameter’s upgradations.
5. AGC Classification Based on Controller Organizations
This section provides an overview of the different organizational structures of AGC in the power system network. They are mainly divided into three different categories, namely centralized, decentralized, and hierarchical control. The hierarchical control is subdivided into two and multi-level control concepts.
5.1. Centralized Controllers
The early part of the literature covers the centralized control concept for the power system AGC operations. In a centralized organization, a global controller operator takes information about all the states of the system and responds accordingly. The basis of the centralized control is the class of the disturbances. In [18], a centralized AGC regulator based on the mixed control theory with pole placement technique is designed for an interconnected power system to eradicate the area frequency disturbances effects and enhance the transient response. Further, the pole placement techniques are utilized to place the poles in the required regions. The main disadvantage of the centralized control approach is the sharing of knowledge from the control region spread around the associated geographical regions. However, the computational burden and large storage requirement preclude the application of centralized control approach for the large interconnected power systems.
5.2. Decentralized Controllers
Contrary to the centralized control concept, the communication problem is effectively tackled in the decentralized controller organization developed for the power system control. This principle is focused on disintegrating the hefty power systems into several subsystems and having autonomous control over each subsystem. The AGC models using a decentralized approach in continuous and discrete power system models are discussed in the literature. The authors in [43] presented a decentralized optimal AGC in a three-area power system with appropriate non-linearities, which has resulted in a reduced frequency oscillation to an appropriate degree and has maintained the interchange power at minimal values. Furthermore, observers are being developed in each area of the power system to approximate the signal applied to each power plant. In a decentralized organization structure, the local controllers use only the local data and require no feedback from other areas. In such a situation, the reliability of the system is a concern as all local controllers operate concurrently. Therefore, an AGC regulator based on the exact plant model will not work well in such an environment. Considering this, an AGC scheme is designed for a multi-area power system using a Riccati-equation approach [44]. The control schemes consist of number of AGC equations for number of areas and a decoupling technique is used to separate the number of Ricci-equations. The controller required feedback from the local area and is not dependent on the feedback from other areas. Moreover, the limits of the parameter uncertainties are also considered to enhance the robustness of the controller. The authors in [45] proposed a decentralized AGC system for a realistic Egyptian power system model incorporating both traditional generating units and hefty share of wind power plants. A Tustin method was developed and implemented in each area of the system, which reduces the implementation cost and enhanced the reliable performance of the controller under heavy load perturbation and wind power plant variations.
5.3. Two-Level and Multi-Level Controllers
To reduce the coordination costs, the feedback gains correlated with a certain state of the neighboring areas are not taken into account in the decentralized management approach. The type of cooperation among the areas renders the overall structure an unpredictable system. Two-level or multi-level control mechanisms are discussed in the literature to solve these limits. For an integrated power system, a two-level AGC regulator is suggested in [46]. Here, a multi-area interconnected power grid is disintegrated into many subsystems at the first stage and an optimization problem is solved in each region based on input from the local area and the other areas. At the second level, an iterative procedure is used to converge the local controllers to the overall optimal solution. The aforementioned approach reduced the computational time using the parallel processing approach and overcome other problems of the centralized control strategy in a hefty-scale interconnected power grid. A multi-agent-centered two-level coordinated control frame for the AGC of a three-area integrated power system is established in [47]. Here, to safeguard the frequency stability, the lower AGC agents maintain mutual power support among the interconnected areas, while the upper-level agent communicates with the lower-level agent using the unified approach to resolve the tension between ACE tapering and system frequency stabilization.
The multi-level AGC is best described by the researchers in [48,49]. A multi-level adaptive AGC based on a self-tuning regulator (STR) is used in [48]. In order to define the parameters on which the ACE for the given area is measured, the control scheme chooses each area as an individually regressive moveable sub-model and a recursive least square technique is utilized to select the parameters. The proposed model is an alternative to the integral-based AGC optimized power system model. The authors in [49] presented a detailed analysis on the implementation of multi-level control law for the AGC regulator in an interconnected power system. The centralized control is enforced at a group level, whereas a distributed control is implemented at a coordination level. When there are fewer groups than nodes at the coordination level, it is more efficient to reduce the expense for a system than the purely distributed control schemes. In addition to that, at the group level, the nodes are less when compared to the total number of nodes which enables the group to minimize the communication and computation overheads. Stability research is conducted on the proposed control systems utilizing the Lyapunov scheme, which has demonstrated greater stability at large sample rates. A three-level optimal control concept for AGC of an integrated power system and interconnected through asynchronous tie-lines are best described in [50]. The proposed control framework is divided into three tiers by the multi-level device concept: the first-level power control, the second-level local controls, and the third-level coordinating regulator. Local controllers manage the sub-systems, while the supervisor is used to boost co-operation factors and assign optimum settings to the DC capacity, which controls the tieline flow through converter controls.
6. AGC Classifications Based on the Control Methods
Since the advent of AGC, different forms of controls were created and introduced. With time, these methods of control were modified and as a result, new methods have emerged. This section overviews classical, modern, and advanced control methods, while intelligent and soft computing control techniques are discussed in the next section. Table 2 lists the summary of control techniques with the main features and drawbacks.
Table 2.
Summary of control techniques with main advantages and disadvantages.
6.1. Classical Control Methods
For the first time, the flywheel governor of the synchronous machine was used to preserve the balance of the power system, but over time, this method became insufficient and a secondary control scheme was established to restore system frequency to its current valuations. This method constituted the classical control method (CCM), which is based on converting a differential equation to a transfer function to get the required system response. Examples of classical controls are Nyquist, Root Locus, and Bode plots. CCMs have the main advantage of continuously providing fast stability and transient response information, thus helping to know the consequences of different system parameters until an acceptable design is achieved. AGC problem in a multi-variable system based on the pole placement technique is addressed in the literature [52]. The pole placement technique assists in placing all the roots of the system characteristic equation in a required location resulting in a constant gain regulator. It is worth mentioning that if all the state variables are not accessible in the aforementioned technique then state estimators may be used for its implementation. The authors in [53] provided a comparison of different classical controllers including I, PI, ID, PID, and ID used in two, three, and five area power systems considering reheat turbine power plants with appropriate non-linearities. Furthermore, the gains of the controllers are optimized using the most recent evolutionary algorithm to improve its dynamic response characteristics. The detailed analysis of the power systems with classical approaches is well studied and in reality, CCM-based AGC designs are utilized in several power systems. However, there are major pitfalls in these designs, such as exhibiting poor dynamic performance during the parametric variations and in the presence of the non-linearities, and are only valid for LTI and SISO systems.
6.2. Optimal and Suboptimal Control Methods
Modern control theory applications in the power system paved the way for the implementation of optimal and suboptimal control methods in the power system frequency control services. Optimal control methods (OCM) fit in the calculus of variations and deal with the closed-set constrained variation problems. Several research articles on the optimal and sub-optimal controls are reported in the literature [43,46,54,55]. A detailed analysis of optimal control methods in the AGC system of an interconnected power system is presented in study [54]. An optimal PI regulator is used, which utilizes a performance index minimization criterion and employing a full feedback control strategy. Transient analysis is used to determine the dynamic response of a system, taking into consideration the settling period, over and undershooting, and damping parameters. The sensitivity analysis is conducted to ensure that the optimum controller is capable of operating effectively in the presence of abrupt load shifts and system parameter variations. It is worth mentioning that the viability of OCMs is feasible only if state variables are adequate enough to restore the input control signal. This requirement can only be met if the controller possesses an appropriately designed observer to regenerate the unavailable state from the available state vectors. The authors in the study [43] proposed an innovative function observer for the optimal AGC in a non-linear complex power system. The proposed control technique estimates directly the applied signal to each power plant with the help of observers. The suggested observer tackles parametric uncertainties, control loops, fault due to sensors, and cyber-attacks on input and outputs. Furthermore, to reduce the complexity and increase the chances for physical implantation, each observer is decoupled from another observer power plant. For performance comparison, the control strategy is evaluated on three regional power grids. The implementation issues of the complex optimal-AGC system are countered by introducing sub-optimal and near-optimal control methods for the AGC designs. In a study [55], the researchers created a sub-optimal AGC configuration for a dual area interconnected power system consisting of a non-reheat thermal energy system in each field and added an AC/DC power link for interconnection. The complexities of solving non-linear matrix equations in an optimal-AGC system are reduced by designing the sub-optimal AGC, which is based on the constrained feedback control technique and requires the feedback of only available states. Furthermore, various designs of weighting matrix ‘Q’ of state cost are presented in that work. Moreover, the dynamic performance of the suggested control technique is also analyzed by achieving the time domain plots in implementing the optimal and sub-optimal AGC system under one percent load perturbations. A sub-optimal AGC system, which is considered as an alternative for the optimal AGC in the hydrothermal power system, is presented in study [17] that works better in stabilizing a feedback system having few state variables. The proposed model is based on the state-space concept and is extracted using the partial fraction method for hydro and steam turbines. Moreover, the suggested decentralized AGC is synthesized using the minimum error excitation technique to further improve its performance.
6.3. Adaptive, Self-Tuning, and Model Reference Control Methods
Since the operating point of the system continually fluctuates, the control effect will not be optimal for the system. To hold system output close to the nominal value, the system’s operating point must be tracked and the parameters should be modified accordingly. Adaptive controllers are known for their exceptional monitoring and parameter adjustment performance to enhance system reliability and robustness. An adaptive-AGC is considered based on the guided and indirect versatile fuzzy control methods [42] for a power system network with several areas. Fuzzy logic is utilized to update the algorithm and an H∞ tracking standard is applied to eradicate the estimated errors and other disturbances effects. The authors in study [56] expounded different AGC regulators in an interconnected hefty power system incorporating various FACTS devices. An adaptive fuzzy PID-based AGC regulator is designed and incorporated in a deregulated power system to improve the dynamic efficiency of the regulator. The gains and the scaling factors of the proposed control technique are tuned using the wild goat algorithm, which is a recently developed nature-inspired algorithm. The suggested control is compared with its counterpart by dispatching the power in different contract scenarios, including poolco, bilateral, and during contract volition. Furthermore, the efficacy of the proposed controller is assured under extreme load disturbances and parametric variations.
Self-tuning adaptive control methods (SACMs) are extended to the AGC regulators in the interconnected power systems, which are mostly used in the non-linear processes [48]. A self-tuning algorithm-based AGC for a thermal source-based multi-area integrated power network is suggested in the literature [51], in which every control area is shown by reducing order stochastic Auto regressive-Moving average model (AR-MAX) and the parameters are estimated through the extended least square technique. A general cost function minimization-based self-tuning algorithm is employed to compute the corrective control for installed generators. The control algorithm is further coupled with a load computing system to take into account the non-zero component of load diversion. Analysis of the proposed control system shown that the regulator demonstrates preferable performance in the presence of appropriate non-linearities (GDB and GRC). A self-tuning regulator-based multi-level adaptive AGC scheme is proposed in the study [48]. The algorithm in the proposed model considers each area as an auto-aggressive average moving model and utilizes a recursive least-squares technique for parametric identifications. Model reference ACMs are commonly used in the AGC regulators that use a reference model to define the desired closed-loop performance of the system. A model reference-based decentralized output-feedback AGC is analyzed in the literature [57] for three areas of integrated power systems with indefinite parameters. An adaptive observer is specifically designed that assisted in estimating the system parameters and state variables using local inputs and outputs. These estimates are then amalgamated with the reference model states to construct the proposed controller for each area that shows improved output in the company of parametric variations and non-linearities in the system. The aforementioned ACMs show encouraging performance but still face some issues, like the possibility of failure of the parameter estimation module, which can seriously put the power system at high risk. Moreover, the ACMs emphasize in bringing the steady-state error to zero and is deprived of mostly seeing the transient performance.
6.4. Variable Structure and Sliding Mode Control Methods
The variable structure control method (VSCM) was developed in the 1950s in a USSR research lab. The most eminent feature of this method is that any changes can be made in the structure of the control system during the transient process. Furthermore, the time at which these changes are made, the resultant structure is not determined by a fixed program, but in conformity with the system’s current state. The versatility of VSCM recommends its implementation for power system control problems. Detailed analysis on the implementation of a variable structure AGC system in a single-area power grid is presented in study [30]. The basic concept of the variable structure control system is explained and implemented to improve the dynamic performance of the integral-based AGC regulator to eradicate the area frequency oscillations. A VSCM-based AGC design for dual and three areas integrated power grid is proposed in [58]. Two models are developed, i.e., optimal and pole placement variable structure AGC regulators. The switching decision of the proposed controllers is taken based on local data and those state variables that are accessible. The results revealed better dynamic response in terms of insensitivities to the uncertainties of system parameters. Sliding mode controllers are the kind of variable structure that drives and constrains the system to lie within a range that encompasses switching functions. In such type of a system, the dynamic behavior is tailored by the switching function resulting in the robustness of the control system. A discrete sliding mode controller (SMC) is utilized in the AGC framework of a power system with four areas interconnected [39]. The proposed control system is based on the entire-state-feedback system that takes the advantage of its applicability in both thermal and hydro power-based control areas keeping in view their non-minimum phase behaviors. The frequency deviation, swapping, generated power and exterior disturbance are measured using a rapid sample-based state estimated method. Simulation results showed that a better system reaction to reject distortions and marinate the necessary quality of control was achieved by a proposed control technique. In the literature [59] a multi-area, interconnected energy system with different power units is provided with an SMC-based AGC output feedback regulator. The controller is tuned using the TLBO algorithm and correlated with the output feedback SMC regulators based on DE, PSO, and genetic algorithm (GA) optimization techniques in a two-region power system with solar, water, and gas power plant in region 1, and thermal, hydro, and nuclear power plants in area 2. The proposed control system is optimized by using the TLBO algorithm. The results of the proposed control system are also checked by incorporating the effect of HVDC link. An SMC is investigated in [60] for the AGC system with a chattering lessening characteristic in a multi-area non-linear integrated power system. The above approach uses a GA algorithm to detect input gains following formulations of SMC designs as an optimization function. To minimize SMC chattering and increase complex performance, the optimization process also recommends double objective functions. VSCM-based frequency controllers have shown better dynamic response due to the unique property of proper selection of the plant parameters. However, due to the complex structure and the associated implementation problems, VSCM is not much appreciated for the AGC systems. Also, controllers centered on the linearized model state equations may require an observer to approximate unavailable state variables that would entail additional data telemetry cost.
6.5. Robust Control Methods
Robust control methods (RCMs) are used in the controller designs of the interconnected power systems to function accurately in case of any uncertainties or disturbances found in the network. RCMs are static and in contrast to ACMs adapt themselves to the measure of variations. Instead, the RCM-based controller continues work by assuming certain variables as unknown. Considering the importance of this method, several studies have been conducted, where RMCs have been implemented in the AGC system [25,44,61,62]. In [61], a systematic study is conducted on the robust AGC regulator implementation in an integrated power grid. A PID controller is used for the AGC system, which is tuned using the fine approach of fuzzy logic under load perturbations. The output of the suggested control techniques resulted in a very robust performance due to an extensibility feature of fuzzy logic, which furnishes an established framework to have wide observability on the control space. In [44], a Riccati-equation approach is utilized to develop an AGC for a multi-area power system with appropriate parametric uncertainties. The overall controller has equations for number of areas and interrelated equations are generated initially, which then decoupled through a decoupling technique. Furthermore, the Riccati equation is made able to incorporate the bounds of parametric uncertainties for improving the robustness of the proposed regulator. A single AGC equation is then obtained from the solution of the respective decoupled Riccati equation requiring no-feedback from other areas. The proposed control system is analyzed after implementing it on a three-area power system, which demonstrates the reliability of the system when subjected to non-linearities. A robust multi-stage fuzzy PID regulator for the AGC framework is designed in [62] in a deregulated scenario of a bilateral contract scheme. The control system is fine-tuned to generate optimal performance based on the online information base and fuzzy inference, for which the membership functions are tuned using the improved genetic algorithm to increase the convergence speed. The proposed controller is tested under severe loading conditions and for a diverse range of parametric variations in the existence of various non-linearities. In all cases, the performance of the proposed control scheme was sufficient in mitigating the disturbing results. Parallel to all these advantages of RCM, massive system order, uncertainly linked subsystems, complex parametric variations, and excessive power network organizational layout hinder RCM’s direct implementation in power system controls.
6.6. Model Predictive Control (MPC) Methods
Model predictive controls (MPC) are the most advanced control method used in the AGC problems to deal effectively with different constraints of the network. The general knowledge of MPC-based AGC regulator of a dual-area integrated power network with hydro and thermal energy systems is presented in [63]. The proposed model incorporated appropriate GRCs, GDBs, and time delays that occurred due to the thermodynamic process of the governor-turbine and communication channels. A bat-inspired algorithm is utilized to optimize the parameters of the suggested AGC system. Furthermore, the superiority of the MPC-based AGC system is shown by comparing its result with GA optimized PI controller over different load perturbations and parametric uncertainties. An MPC scheme is utilized in AGC framework of the Irish transmission network with significant penetration of wind power [64]. Such penetration of wind power resulted in decreased system inertia, which can have a direct effect on the operator’s efficiency in regulating the frequency of the system. Various implementation problems and computational aspects are presented and the outcomes of the proposed control schemes are equated with traditional PI controllers for a conclusion. An adaptive MPC-based AGC for a dual area integrated power network with thermal and photovoltaic sources seeing the non-linear characteristic of governor and turbine is proposed in the literature [65]. First, the dynamic features are approximated using a discrete state-space model, then the prediction model is estimated using the model parameters and the control signal. The control signal is deployed using the control value of the weighted total of the residual errors and control input error. The superiority of the proposed control model is shown by comparing the results with those of the firefly algorithm, and GA-based PID regulators under extreme load disruptions and parametric uncertainties. An AGC system based on MPC is proposed for multiple terminal HVDC grids, which is a new technology in the development of global large-scale power grids [66]. These grids can efficiently regulate the frequency of AC systems. The advantages of MPC versus PI are shown for the enhancement of both frequency regulation and DC grid control power despite the delays and DC voltage constraints.
6.7. Digital Control Methods (DCMs)
Digital controllers are more accurate, smaller in size, having lower noise, and more adaptable. Considering these important features, researchers carried out extensive work on the application of DCMs in power system functions. A detailed study on the general usage of DCMs in AGC power systems was conducted in the literature [20], to achieve a discrete model of ACE by sampling the tie-line power flow and frequency variations. The outcome was then transmitted via telemetry. It was found that, unlike continuous mode, the discreet mode control vector must remain constant over sampling instants. Moreover, the dynamic criteria for the performance evaluation of the proposed controller were also presented. A new type of SMC-based digital AGC regulator using a full feedback control strategy to handle both thermal and hydropower plants is suggested in the study [39]. To enable the full feedback control strategy, a state estimation method is adopted, which is based on the fast sampling of measured outputs. The proposed control system is tuned using the GA for better disturbance rejection and to maintain the quality of the proposed control system. A digital model of PID-based AGC for the Egyptian power system (EPS) inculcating the communication delays is presented in the study [45]. The proposed model includes both traditional power generating units of Egypt like reheat and non-reheat as well as hydropower systems with non-linear properties and wind-generating units. To achieve the aim of an overall closed-loop system, the digital regulator-based Tustin method is developed for each substation of EPS. The analysis of the proposed controller showed better performance than the analog controller under heavy loading conditions, high wind penetrations, and communication delays. Furthermore, the proposed system reduces the implementation cost as it provides reliable performance at a huge sampling time. A discrete AGC system for a Spanish power system interconnected with French, Portuguese, and Moroccan power systems is proposed in one study [67].
7. Intelligent and Soft Computing Control Methods
Practically, non-linear systems like power systems are usually approximated by the use of reduced-order models, probably linear (related to the particular characteristics of the plant). Therefore, non-linear systems are accurate under some operating conditions in most situations. Otherwise, the control system would not be adequate or would require to adopt the modified system parameters. Moreover, the nature of the modern power system holds uncertainties, nonlinearities, and complexities, for which the traditional AGC system does not provide a sufficient solution. Intelligent control methods and soft computing-based control strategies are very effective in solving the above-mentioned problems. This section provides a comprehensive review of Intelligent and Soft Computing AGC approaches.
7.1. Intelligent Control Methods
7.1.1. Fuzzy Logic Control (FLC)
FLC theory was introduced in 1965 as an intelligent concept that advances the traditional control theories. FLC is used as an important tool for mathematical approaches to solve power system problems. Hence, significant literature is reported on FLC applications in power system control to enhances its reliability and robustness. A design procedure and numerical validation of a robust fuzzy logic-based tuning method for AGC regulators in a multi-area power grid are presented [61]. Here, a triangular membership function is used to convert the crisp value into a linguistic variable and a Mamdani inference mechanism is utilized for the proposed controller. It is worth to mention that the proposed controller is only activated encountering faulty situations, while in the steady-state only the conventional PI controller performs the activities. The AGC based on direct and indirect adaptive fuzzy logic for a multi-area energy system is suggested in study [42], in which different approximation capabilities of the fuzzy technique are explored to estimate a suitable regulator law and algorithm for parameters upgradations. The performance criterion of H∞ has been used to eradicate the area errors and external disturbances. Correlation of the proposed control framework with the traditional PID and type-2 fuzzy controller has shown better results in providing stability of the overall closed loop. The research work on the PI and PID controllers centered on fuzzy logic concepts has also been discussed in the literature. In [62], the authors introduced a multi-stage fuzzy AGC regulator in a three-area restructured power grid using a bilateral arrangement. In the proposed control system, the control signal is tuned online containing a minimal number of references, and has only two basic laws. In addition, membership functions are designed using the modified GA to ensure a global optimum value and to reduce the speed of algorithm convergence. The analysis of the proposed control scheme delivered better performance under the large load disturbance and variations in the parameters. A self-tune PID regulator is proposed in study [68] for the AGC system in a dual area integrated power grid. A bunch of control rules is produced for the regulator from which the control signal is determined using an information-based and fuzzy inference. In addition, a variable is utilized for the proposed regulator, which adjusts the I/O scaling factors of derivative and integral coefficient in the proposed PID type fuzzy rationale system.
The parallel combination of fuzzy logic and PID proved a useful control strategy in non-linear power systems. The resultant controller delivers better dynamic performance when states are not near to the equilibrium and parallel to that it also holds a lower control signals profile. However, this approach is only efficient in effectively selecting the tuning parameters and optimizing them for optimal solutions. Therefore, opting for the optimization algorithm for parameters tuning is of significant importance. The authors in [69] has applied a fuzzy PID regulator for the AGC framework in two region power system with hydro and nuclear energy sources. The overall parameters are tuned by employing a gray wolf optimizer algorithm. The GRC of 3 percent for thermal power plant and 270 percent up and 360 percent down for hydropower plant has been considered. The performance parameters are measured using the TCPS in series with a tie-line. The analysis showed that the power full gray wolf optimizer algorithm can efficiently damp the oscillations in both area and tie-lines. In addition, the robustness of the proposed controller has been tested under different loading conditions. An online keen procedure dependent on the blend of self-adaptive bat algorithm and fuzzy strategy to ideally tune the PI parameters of an AGC framework in a four-territory incorporated force framework is introduced in the literature [70]. The simultaneous optimization of controller parameters and input/output membership function increases the robustness and security of the complete system against outside disturbances. The supremacy of the anticipated online control system is checked by comparing its result with the latest fuzzy PID control techniques.
7.1.2. Artificial Neural Network (ANN) Control
The prime interest of researchers in artificial neural networks is its best approximation of arbitrary non-linear functions and its usage in parallel processing and multivariable systems. Further, a neural network mimics the human brain and can learn in a complex multi-layer network based on which it responds intelligently. Various types of topologies exist for the ANN in deep learning algorithms that are applied to both supervised and unsupervised learning approaches. Besides, the newly evolved reinforcement learning algorithms for ANN are catching the ground in real-world applications. Throughout the development of AGC schemes, ANN schemes are suggested and used by the researchers [21,25,71]. A comparative study of various savvy control procedures for the AGC of a dual area integrated power network considering three kinds of turbines, i.e., reheat, non-reheat, and the hydraulic turbine is proposed in the literature [71]. The kind of control techniques incorporates ANN, fuzzy logic, and regular PID-based controllers. A multi-layered perceptron is utilized as an example in ANN, where numerous input-neurons work in correspondence to frame the layers, which are then used to build up the entire network. The network is trained through the Levenberg-Marquardt back propagation algorithm and considered both transient and steady-state performance of the plant output. To address the disadvantage of requiring an immense amount of training time and a large number of neurons in a simple neural network, a generalized neural network is practiced in [21]. The current downside is removed in the generalized configuration of the neuron. The suggested control scheme was tested in various system scenarios and with different types of loads, showing a quicker response due to its frequency shift rates to predict load variations.
An emotional reinforcement learning control (ERL) scheme for AGC of a dual area interconnected grid and the China Southern Power System is suggested and applied in the literature [72]. The agent in the proposed scheme considers two portions, namely a mechanical logical part and a humanistic emotional part. The suggested controller creates various control techniques depending upon the requirement of the operating scenarios by highly integrated artificial emotional functions including quadratics, exponential, and linear functions, and with the RL elements such as learning rate, reward function, and actions. Moreover, a deep forest RL algorithm is designed in [73] as a preventive strategy for the dual and triple areas AGC problems. The proposed method consists of two components of deep forest and multiple subsidiaries. The deep forest is responsible for forecasting the next systematic condition, while several subsidiaries are used to lean on the characteristics of the power structure. The superiority of the proposed control is tested on ten other traditional controls in two and three regional power grids and China’s southern power grid. The proposed control showed the best efficiency in emergency scenarios and reduced the dimensionality challenge. A reinforcement learning (RL) scheme is also used to train the ANNs used in the AGC systems. Parallel to this, the hybrid structure of the ANN controller and other intelligent controllers are also reported in the literature. A combination of the ANN and a conventional control methodology is presented in [74] for the synthesis of AGC in the interconnected power system. Further, a non-linear ANN-based AGC model is suggested, which is centered on the µ-synthesis theory that deals with the uncertainties in the power system. Moreover, the flexibility of the ANN has been increased over time using the flexible sigmoid functions. The resultant network is called a flexible neural network (FNN) used for the design of the AGC system. An artificial FNN based AGC for a three-area integrated power grid network under a restructured environment is proposed in the literature [75] to attain the minimum acceptable regulation in the area frequency and to eradicate the effect of the disturbance during the heavy loading conditions and line disturbances. Here, the authors have used a sigmoid unit function to shape the neural network as a flexible unit.
7.2. Soft Computing Control Methods
7.2.1. Genetic Algorithm (GA)
GA is a meta-heuristic optimization technique that handles strongly non-linear and noisy cost functions. GA uses the individual fitness value and can be effectively converted to a near-optimal solution in complex engineering applications. Many literature studies report the use of GA for tuning the control parameters of the conventional AGC regulator system. A GA is utilized in the AGC system of an interconnected power system with a sliding model controller incorporating the non-linearities of GRC and integral control limiter [60]. The GA is utilized to find gains of the feedback and the switching vector of the regulator. A hybrid Taguchi-genetic algorithm (HTGA) is proposed in [76] for the AGC of a dual area integrated power grid with multiple sources (thermal, hydro, and wind power sources) based on the doubly-fed induction generator (DFIG). To increase the performance of the genetic algorithm in respect to a large standard deviation of the fitness value, a Taguchi technique is utilized, which is centered on the adapted statistical method and systematic cognitive capability. The supremacy of the suggested modified HTG algorithm is proved by comparing its optimum gains for the AGC regulator with the conventional GA-based AGC system for the dynamic stability of the power system.
7.2.2. Particle Swarm Optimization (PSO)
PSO is another population-based evolutionary modeling approach inspired by social behavior analysis rather than suitable survival. The implementation of the PSO in the AGC method shows that the PSO technique produces the optimum gains required in the shortest possible time. The implementation of the PSO and improved PSO algorithm in the AGC framework of two unequal areas interconnected power systems is presented [32]. The improved PSO methodology uses a dynamic search squeezing approach to speed up the optimization process. The efficiency of the suggested regulator is assessed by the objective function of the ITAE and with a 1% step load change in either control field. Further, the results revealed that the suggested IPSO-based regulator increased the dynamic efficiency of the network by considering AC/DC lines instead of AC tie-lines. A PSO-based optimal-AGC system is designed in [45] for an Egyptian power system with conventional and renewable energy sources by considering the communication delay. To safeguard the stability of the complete closed-loop system, an optimal regulator is designed for each subsystem, which uses the Tustin approach. The contrast of the suggested control system with other conventional controllers proved that it has more robust performance and delivers unswerving performance at large sampling time.
7.2.3. Firefly Algorithm (FA)
The firefly algorithm (FA) is a metaheuristic algorithm that is recently established and is inspired by fireflies’ attractive and flashing behavior. The use of an FA in the power system is suggested in [65,77]. The authors in [77] presented a PID-based AGC system for a five-region interconnected power framework considering the reheat thermal energy station in every zone. Each area has its appropriate governor, reheater unit with turbine, generator, and regulator unit for speed. To properly tune the parameters of the proposed PID-based AGC regulator, the nature-inspired firefly algorithm is used. Moreover, the predominance of the suggested approach is tried by contrasting its outcome with GA-tuned PID-AGC and PSO-tuned PID-AGC framework. The proposed FFA-based AGC framework achieved better execution in regard to settling time, top overshoot, and undershoot. Besides, FFA likewise showed better execution with an enormous number of iterations.
7.2.4. Artificial Bee Colony (ABC) Algorithm
The ABC algorithm is a swarm-based algorithm that depicts a honey bee swarm’s clever hunting behavior. In the literature it has been frequently used by researchers to solve AGC problems [78,79]. In [78], a detailed analysis of the ABC algorithm, when applied to the AGC of the interrelated thermal energy system is provided. The algorithm is utilized to change PI/PID regulator boundaries in the AGC system. Further, the strength of the proposed regulator is checked by uncovering the AGC framework to a wide scope of varieties in the load and generation boundaries. Moreover, the proposed controller performance is compared with the recently developed heuristic algorithm by determining their transient performance. An ABC-based AGC model for a stand-alone microgrid having hybrid renewable energy sources is considered in [79].
7.2.5. Differential Evolution (DE) Algorithm
DE is a population-centered process that provides the solution to noisy, non-linear, non-continuous, and multidimensional problems. DE uses the iteration process to provide better results concerning a defined standard. A study [80] demonstrated the behavior of DE-based 2DOF-PID-AGC regulator for a dual area integrated power network with a thermal power plant. The proposed controller is designed using the ITAE objective function and the robustness of the regulator is checked under the diverse loading condition of 1%, 5%, and 10% SLP, applied in either area, which has shown better performance in term of percent overshoots and settling time. A hybrid DE and PSO technology are used in [81] to configure the PID-based AGC system parameters. The proposed controller employed a hybrid form of DE and PSO technique to regulate the parameters. The dominancy of the suggested control process is shown over the independent usage of the DE and PSO technique. Also, the control algorithm is observed in different system parameters and it was noted that even under extreme loading conditions, the optimum gain of the proposed control did not need any modification.
7.2.6. Bacterial Foraging Optimization (BFO) Algorithm
The newly designed optimization algorithm BFO is focused upon Escherichia coli’s searching behavior and used by researchers in the power system control problems for its efficacy in the results. Researchers have described the implementation of AGC based on the BFOA algorithm in [34]. The authors in [34] have utilized a BFOA optimized Integral regulator centered AGC system for a dual area power network to tune its parameters under different load perturbations. The proposed control system based on the BOFA algorithm has been tested with IPFC units to advance the dynamic performance of the overall control. In [53], various classical AGC regulators including I, PI, ID, PID, and ID utilized in different area thermal energy-based power system are proposed, which are tuned using the BFO algorithm. The authors in [27] presented and compared I, PI, PID, IDD, and F-IDD regulators for the AGC system of hydrothermal energy-based power plants using the ISE in formulating the objective functions. A sensitivity study indicates the robustness of the F-IDD regulator under a variety of loading situations.
7.2.7. Bat-Inspired Algorithm
The bat-inspired algorithm relies on the behavior echolocation of microbats with different emission and loudness pulse rates. The issues involved with the usage of this algorithm in AGC are investigated in the literature [63,70]. A BIA optimized MPC-based AGC regulator in a dual area power network having non-linearities of GDP and GRCs is presented in [63]. The proposed control system showed superior results in terms of overshoots/undershoots and settling time by comparing its results with a GA-optimized PI-based AGC regulator. An online intelligent control scheme for the AGC is suggested in a multi-area interrelated power grid using a hybrid form of a bat algorithm and fuzzy logic [70]. The hybrid control technique incorporates the properties of both the fuzzy logic and bat algorithm to optimize the typical PI regulator parameters that ensured the robustness and stability of the proposed control system.
7.2.8. Quasi Oppositional Harmony Search (QOHS) Algorithm
A QOSH algorithm added to the AGC of the power system network having two, three, and five areas interconnected with each other is presented in [38]. In the first step, QOSH is used to change PID controller parameters, while in the second phase, a PID is optimized with the proposed algorithm. Further, the suggested algorithm is also examined in the occurrence of nonlinearities and parametric uncertainties. In the end, a comparative comparison was rendered with other traditional control algorithms to authenticate the efficacy of the proposed process. The application of the QOSH algorithm to the SFL centered AGC of a multi-area restructured power grid is analyzed [19]. A total of four areas having eight GENCOS and eight DISCOS is considered as a completed plant model to examine the performance of AGC in the occurrence of intensified bilateral behaviors. The key benefit of QOSH is a good dynamic response over different parametric variations.
7.2.9. Teaching Learning-Based Optimization (TLBO)
TLBO is a recently developed method that emulates the teaching and the learning method of the classroom and does not require the parameters associated with specific algorithm controls. It helps to find a global solution and provides an analysis of AGC design and performance. The AGC system for dual area power grids with a thermal energy source and based on the output feedback SMC regulator is presented in the literature [59]. The parameters of the proposed regulator are improved utilizing the recently created TLBO algorithm. In addition, the implementation of the suggested regulator is also expanded to a multi-area power system incorporating the HVDC link. A detailed overview of the execution of a fuzzy PID controller in two unequal power grids is given in the literature [82]. The architecture problem is developed as an optimization problem and the parameters of the proposed controller are obtained using the TLBO algorithm. In addition, a comparison of the proposed approach with some of the recent optimization strategies is shown, which is comparatively stronger for maximizing dynamic performance in terms of settling time and peak overshoots and undershoots.
7.2.10. Cuckoo Search Algorithm (CSA)
CSA is an effective algorithm created by Yang and Deb that solves problems of global optimization. CSA is influenced by some cuckoo species’ compulsory parasitism as they put their eggs in the nests of other birds. In [36], a two-degree of freedom regulator for a multi-area AGC framework is proposed considering reheating turbine-based thermal sources. Various FACTS devices such as SSSC, TCSC, TCPS, IPFC are used and compared using the CSA-based 2DOF-IDD controllers for the AGC system. Further, sensitivity analysis showed that the parameters obtained for a CSA-based 2DOF-IDD-based AGC framework in the company of IPFC are robust and need not be re-set in the presence of large load perturbations. The authors in [83] presented a CSA-based AGC system for a dual area power grid with hydro, thermal, and wind power plant based on DFIG. The parameters of the DFIG and AGC are tuned using the CSA algorithm. Furthermore, the effect of the different load conditions on frequency regulation is studied in different environments.
7.2.11. Grey Wolf Optimizer (GWO) Algorithm
GWOA is a modern algorithm influenced by the social behavior of grey wolves, exploring this capacity to solve real-life problems. An AGC regulator based on I, PI, and PID for a three-area power framework with thermal energy sources is provided in [37] considering the necessary GRC constraints. The proposed controllers are calibrated using a GWO algorithm and sensitivity analysis is conducted, which showed that the obtained parameters are safe and are not expected to be modified due to significant changes in the system conditions. A detailed implementation of the GWO algorithm for the implementation of fuzzy PID regulator in the AGC of two-area power grid with appropriate non-linearities of GRCs is presented in [69]. The use of TCPS in tie-line with the proposed GWO based AGC system showed the best performance under different loading conditions and system and parametric variations.
7.2.12. Other Computing Control Methods
The other soft computing algorithms for the AGC problems in the power system are wind-driven optimization (WDO) algorithm [29], big bang-big crunch algorithm [40], hybrid local unimodal sampling technique (LUS) [84], ant colony optimization algorithm [26], wild goat algorithm (WGA) [56], grey wolf optimizer algorithm [69], self-adaptive modified bat algorithm [70], quasi-oppositional selfish-herd optimization algorithm [85], and whale optimization technique [86]. In [29], a detailed investigation is carried out on the implementation of the WDO-based AGC regulator in the integrated power system. Further, the analysis on WDO-based AGC system considering different objective functions is carried out and robustness of the suggested control technique in situations of varying system limits is confirmed. In [40], the authors used a big bang-big crunch algorithm to optimize the parameters of type-2 fuzzy PID-based AGC system in a deregulated power system to further improve the convergence speed. A hybrid LUS-TLBO algorithm for tuning the fuzzy-PID regulator is proposed [84] for two unequal areas integrated power systems. For a load agitation in area 1, the dynamic output of the suggested regulator and traditional PID regulator is implemented and compared. Further, the strength of the aforementioned regulator for an AC tie-line is also carried out by varying the parameters from −50% to 50%. A quasi-oppositional selfish-herd optimization algorithm is proposed in the literature for the frequency control management system of an isolated micro grid, incorporating bio-gas, micro hydro, solar thermal power unit, and bio diesel generator unit. Moreover, suitable demand response strategy is devised for the proposed micro grid in isolated and interconnected mode. The system response is studied in term of its adaptability in four different scenarios of source variations and three scenarios of demand response variations. The authors in [86] presented a whale optimization technique for a Fractional order PID with filer of AGC in a dual area power network under restructured environment. Area 1 had a thermal generating unit and DGs including WTS, DSTS, AE and fuel cell, while area 2 had gas and thermal power plants. The obtained parameters for proposed AGC system using WOA showed greater robustness under a wide range of parameters. In Table 3 and Table 4, the detailed comparative analysis of AGC systems in two, three, and five area power system is provided using different controller approaches.
Table 3.
Performance evaluation of AGC in two-area power systems with conventional sources.
Table 4.
Performance evaluation of AGC in three and five area power systems under different conditions.
8. AGC Incorporating ESSs, FACTs Devices and HVDC Link
This section briefly describes the applications of various energy storage systems, FACTs devices, and the integration of HVDC links into the AGC network to further enhance its capabilities. This section also discusses the implications of these devices in the modern era.
8.1. AGC Incorporating Energy Storage Systems (ESS)
The significance of ESSs can be estimated by how their utilization in AGC productively diminishes frequency varieties in the power system networks. Keeping in view such importance, researchers have investigated the utilization of ESSs in AGC models for interconnected power systems. The authors in [33] introduced the AGC framework for a deregulated two-region interconnected power system having different thermal and hydro gas-producing plants and incorporating capacitive energy storage systems (CES) and DFIG for the frequency regulation purposes under different load perturbations. The performance of the proposed control framework is tried in various contract scenarios, which showed that the integration of CES units with TCPS into the proposed control system provided better transient performance in arresting the frequency dips and the deviation in the tie-lines. Redox flow batteries usually do not age out by the frequent charging and discharging. Further, it is equivalent to the SMES and results in a very quick response characteristic. Keeping this in view, the authors in [34] have presented an Integral-based AGC regulator for dual area deregulated power system, where different devices with fast consumption rates and different capacities may cause and sustain frequency oscillations in the system. To tackle this problem, the RFB system is mounted in successions with IPEC and a tie-line for investigation. Simulation results have revealed the better dynamic performance of the proposed control system in the wake of sudden load perturbations. In [87], the authors have explored the usage of the double-layer capacitor (DLC) with the collaboration of fuel cells in LFC of a standalone hybrid renewable-based microgrid. The dynamic efficiency of the result revealed that DLC provides a better solution for damping the oscillation in an isolated distributed generation system. The study in [88] provides an in-depth analysis on the implementation of supercapacitor and Li-battery into AGC of traditional multi-area power grid to improve its dynamic efficiency against the frequency oscillations and other external disturbances. Two theories of state feedback and matrix inequality are combined to design the proposed controller, which estimates the power required from the batteries to be injected into the system. Comparisons of the proposed control system with a conventional PID-based AGC system proved its performance in stabilizing the whole system and increasing the robustness of the overall controller. The authors in [86] presented a deregulated two un-equal region power systems. Area 1 has a distributed generation system and thermal units, while area two has only thermal generation sources. Further, the DG system consists of WTS, DSTS, AC, FC, DEG, and battery energy storage systems. The AGC based on the filter-PID cascaded with a fractional order PID (PIDN-FOPID) regulator is proposed for the suggested power system and is tuned using the whale optimization algorithm. The matchless quality of the proposed regulator is checked by contrasting it with I, PI, and PIDN based AGC framework, showing that the former one outperformed the other controllers in reducing the settling time and oscillation during the variable power flow from both the wind and solar power sources. Also, the dynamic performance has been further improved with the utilization of the BES system.
The use of VICs in the AGC framework is another exciting approach to boost the inertial response and stability of renewable energy-based power system networks, where mounted inverters do not have a spinning mass and eventually minimize system inertia. In [23], an additional VI-based MPC is incorporated into LFC system of a microgrid structure composed of wind and thermal power plants. All the required inherent requirements and specific constraints relating to the operation of thermal power plants are engaged into account in understanding the accurate microgrid model. The control of the inertial block is refined by conveying energy storage frameworks, where the inertial help is given to the microgrid system similarly to coordinated rotors, and in this way, the transient response and unwavering quality of the microgrid framework are improved. VIC for an integrated power system with high reconciliation of environment friendly power sources is also adopted in the study [89]. The proposed VIC loop uses second-order characteristics that assist in enabling the damping and inertia emulations in the integrated power system and as a result, increases frequency stability and resilience. The inclusion of the HVDC connection to the interconnected power grids has further raised the demand of the VIC regulators. In [90], a virtual synchronous control-based VIC is studied in the HVDC connection of the interconnected power grid. To mirror the impact of virtual inertia parameters, a progression of affectability investigations is conducted to decide the correct determination of basic control parameters for dependability of the system. The prevalence of the proposed control framework is tried on two and three region power system networks.
8.2. AGC Incorporating FACTS Devices
From the past several decades, FACTS devices are reliably helping in using the transmission lines at their full limit as opposed to adding new and additional lines. The utilization of FACTS devices in AGC regulators of the power framework is accounted for in the literature [36,69]. Comparative performance of Static synchronous series compensator (SSSC), Thyristor controlled series capacitor (TCSC), Thyristor controlled phase shifter (TCPS), and IPFC in the presence of 2DOF-IDD based PID-AGC system for a three un-equal areas power grid is offered in the literature [36]. Unlike other facts devices, the existence of IPFC in all three areas provides improved efficiency in the system under differing load conditions, and as a result, provided better system output. In [69], the TCPS phase angle is regulated by a fuzzy-PID regulator in a dual-area power grid with hydro and thermal energy sources to increase the overall dynamic efficiency of the system. The analysis revealed that the overall frequency oscillation can be efficiently damped out using the proposed control scheme. The problem of disturbances among the interconnection and the control of tie-line power using the phase angle property of the TCPS is tackled in [91]. Furthermore, the tuning of the parameters using the PSO technique for the PID controlled AGC regulator in a bilateral contracted scenario after the large variation in load demands is investigated. The major findings of this research work revealed that the use of TCPS in tie-line traffic is very efficacious in suppressing the frequency deviations and oscillation in the tie-line traffic. A new robust decentralized AGC regulator for the interconnected power system is designed in [92] using the SSSCs cascaded with the tie-lines. The proposed decentralized AGC system converts the installed SSSCs into the MIMO system, thereby making each LFC of the SSSC system, to be designed independently, effective against the oscillations. Moreover, the stability margin of the suggested control is further increased in systems with uncertain states and having parametric variations by the use of a multiplicative stability margin. The comparative performance of TCSC-based AGC system with SSSC and TCPS as damping controllers in two equal-area integrated power systems is presented in [93]. The Taylor expansion is used to model the TCSC impact for low load turbulences in the tie-line control. The parameters of this control are set by an improved PSO algorithm using an ITSE objective function. The performance analysis showed that the TCSC-based AGC regulator effectively dampens the frequency and tie-line oscillations.
8.3. AGC with HVDC Link
With the potential to effectively transfer cumbersome power over long distances in the interconnected power systems, the usage of the HVDC connection in the power system control service is highly significant [90]. Important research on the frequency regulation of interrelated power grids via the HVDC link is presented [32,59,66,90,94]. An HVDC design technique for the AGC system in a multi-area interrelated power grid is demonstrated in the study [94]. In this process, the modeling of the , which is the time obligatory for the HVDC link to established the DC current after the load perturbations is challenged, and based on that analysis, a new accurate model is suggested for the HVDC link. Also, the inertia-emulation-based technique for AGC is introduced to harness the power from the capacitors of the HVDC link. In [32], three meta-heuristic enhancement methodologies are utilized to change the parameters of the PID-controlled AGC system in a double territory interconnected power grid. Various sources, for example, hydro, thermal diesel, and wind power plants are utilized in every region considering the AC/DC tie-line impact. In each control area, the output of the controller is checked for a 1% load shift. The results revealed that better dynamic performance of the proposed control mechanism can be achieved by using the AC/DC tie-lines instead of only AC tie-lines.
9. AGC in Renewable Energy Generation Systems
Currently, unparalleled developments are happening in the power markets that are not only limited to problems of deregulation and the implementation of modern regulatory strategies but mostly due to the amalgamation of RESs into the existing grid that significantly impact the system’s inertia. However, it is difficult to dilute the value of renewables as green energy is a reliable clean energy option that comes from nature. Moreover, renewable energies are both the least costly and less expensive than other electricity generation sources. Research on renewable integration has shown that it influences the frequency and power volatility of the grid, which after large penetrations become more significant. Further, massive penetration requires network augmentation due to the risk of tie-line overloading. The AGC system in this regard requires more intelligence and flexibility to balance the fluctuating power and regulate the frequency deviations due to the integration of renewable energy sources. Therefore, substantial research is witnessed in the literature, in which the AGC performance criteria, capabilities, and technologies are revived in the presence of RERs.
Solar power is the most common and easiest to use in all renewable energy resources. The impact of power resulting from the photovoltaic generation on the load frequency controller is analyzed in [95]. The analysis showed that the integration of a photovoltaic source of 10% into the grid would approximately require a 2.5% increase in the capacity of AGC, compared to the conventional AGC regulators. The AGC technique for a power system with multi-areas connected and having photovoltaic generation sources is presented in [65], incorporating the characteristic of GDB and GRC non-linearities. A discrete time state-space model established the characteristics of the system, and then a predictive model is developed using the state vector and applying the control signal roll optimization technique. The suggested control model is compared with the new heuristic models grounded on FA, GA, and PSO algorithms, which showed the superiority of the later techniques. The ability of the AGC for the performance intermittency of the PV module is determined in [96] that is dependent on the isolation data taken from different points. The investigation showed that AGC capacity depends on the intermittency speed and if it is assumed that a certain power plant will respond to the PV fluctuation, then the required AGC capacity would be large than that of the PV system. Further, the AGC capacity largely depends on the observed insulation at a single point.
An AGC scheme of integrating wind power sources into the grid is described in the literature. Wind power can be used for control purposes and also as a single electricity generating unit. The authors in [83] introduced a study on the incorporation of DFIG-based wind power plants in the AGC of two territory power frameworks for the frequency regulation ability of the system. Two situations of an ordinary power plant are introduced, in which DFIG based wind power plant is integrated, first the two zones have nuclear energy stations and in second one nuclear energy station in zone one supplanted by hydropower plant. A CSA is utilized to concurrently optimize the parameters of the AGC and DFIG to additionally improve the frequency control ability of the system. Moreover, the analysis showed that utilization of wind power in a hydro-thermal power system is better when the DFIG-based wind power plant is installed in the hydropower area as compared to the thermal area. Integrating large-scale wind power into the system is a new test for AGC due to the unpredictable nature of wind energy. Generally, the active power control of WT is accomplished by pitch angle control (PAC) or rotor speed control (RSC), which give an exceptionally sluggish reaction and restricted controlling range. To improve the regulating performance, an altered control technique is proposed in the literature [97] to simultaneously enact both RSC and PAC and accomplish full leeway of the rotor kinetic energy to assimilate or deliver the required power. Besides, the AGCs based on intelligent control schemes such as NN, FL, and GA are also proposed in the literature to make feasible the large wind power integrations into the conventional power system for frequency control capabilities. In this regard, a decentralized fuzzy logic controlled AGC system is proposed in the literature [98] for an integrated power system having a considerable penetration from the wind power sources. The controller parameters are tuned using the PSO technique for increasing the dynamic efficiency of the regulator. The results revealed that the proposed AGC system provided a better response relative to the conventional AGC system following the abrupt load fluctuations and varying levels of wind power penetration. The AGC scheme, based on the PO-2-DOF-PID control technique in the power grid for the incorporation of large quantities of wind power is suggested in [99] to minimize variability and boost the system inertial reaction. The regulation is evaluated for three region power systems with high and low wind power production in each case and has a satisfactory solution to the adverse effects induced by the inclusion of wind power in the AGC. Table 5 provides the comparison of AGC schemes with and without RESs from recent literature.
Table 5.
Summary of AGC Schemes with/without RES from recent literature.
10. AGC in Microgrids and Smart Grids
10.1. AGC in Microgrids
A microgrid (MG) is a fairly recent phenomenon in the contemporary electricity sector, comprising small power systems with the ability to work in isolation from the main grid and is known for its resilience and reliability. MG is capable of handling traditional and non-conventional generation units like micro-turbine generators (MTG), diesel engine generators (DEG), fuel cells with aqua-electrolyzer, wind turbine generators (WTG), solar photovoltaic generators, solar thermal power generators, and energy storage units like, flywheel storage system, ultra-capacitor, and SMES. MG supports these units as a single entity and offers essential control capabilities. This section overviews the frequency management services in a single area stand-alone MG system and multiple areas stand-alone MG. Figure 3 shows the transition of a single area standalone microgrid to four area standalone microgrid systems, while Table 6 provides a comparative analysis of AGC schemes in both types of MGs network.
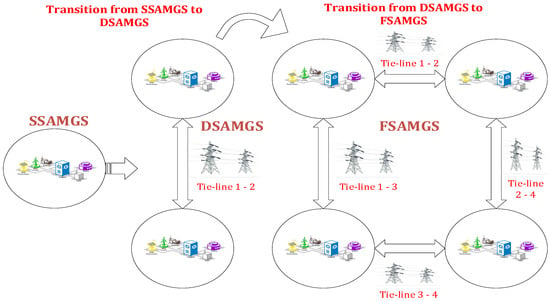
Figure 3.
Transition from Single Area Microgrid to Dual and Four Areas Interconnected Stand-Alone Microgrid System, SSAMGS: Single Area Stand-Alone Microgrid System, DSAMGS: Dual Areas Stand-Alone Microgrid System, FSAMGS: Four Areas Stand-Alone Microgrid System.
Table 6.
Comparison of AGC schemes in microgrids networks.
10.1.1. Single Area Stand-Alone MG Systems (SSAMGS)
MG in stand-alone mode is mostly used in areas that are inaccessible to the central grid. Here the purpose of the AGC is to control the frequency and hold the value of each generation unit within the optimum range. However, due to the stochastic nature of RESs, microgrids are highly exposed to unstable oscillations in frequency. In this respect, the authors in [102] proposed an intelligent terminal SMC-based AGC system for an islanded microgrid having diverse renewable energy sources. The problem of conversion of different states of the system in a finite time is handled using the non-linear sliding surface and by the usage of fractional power term in the surface. The parameters of the suggested controller are tuned using the ABC algorithm, which showed an excellent performance in the microgrid. To encourage the reliable participation of wind power and photovoltaic power into the LFC of a stand-alone microgrid system, it is necessary to study the accurate prediction model of solar and wind sources. In this respect, the authors in [103] have analyzed a long short-term memory (LSTM) recurrent neural network (RNN) to accurately forecast wind and solar power. The forecasted power from both solar and wind are utilized in the LFC model of a SSAMGS to analyze the behavior of LFC and the response of these sources under sudden load perturbation. The study in [79] presents an artificial bee colony-based AGC model for a SSAMGS system, incorporating DEG, FC, FESS, and WTG as reserves for the active power injection. The analysis showed that the proposed control system has effectively dealt with different problems of isolated microgrids such as low inertia, and unpredictable nature of RES. Furthermore, simulation results have shown that the above-mentioned RES has effectively handled the execrations in frequency during the load perturbations. A new LFC regulator employing fuel cell and capacitor banks to control the frequency of the single area stand-alone MG is explained in [87]. The MG incorporates a wide range of energy sources. The proposed control is tested under different loading conditions utilizing real weather data. Moreover, to effectively reduce the frequency oscillations in the stand alone microgrid, the authors in [104,105] proposed a linear active disturbance rejection control technology for LFC in a SSAMGS. The concept of extended state observer has been used to approximate the extended states and compensate estimation of disturbances. Furthermore, the analysis of the various demand coefficient influence on LFC has also been carried out to check the response speed of the suggested controller. Notwithstanding the far and wide utilization of AGC controllers in SSAMGS, it faces a few difficulties, for example, dealing with the low moment of inertia and the discontinuous nature of the RESs.
10.1.2. Multiple Areas Stand-Alone MG Systems (MSAMGS)
To meet the consistently increasing daily load demands and to supply reliable power, the idea of the multiple areas stand-alone microgrid system (MSAMGS) is another promising solution. Villages far away from the main grid can develop MSAMGS to meet their daily load demands, but as mentioned earlier microgrids with multiple areas are still susceptible to the frequency oscillations due to many factors such as a low moment of inertia and the volatile nature of renewable energy sources. In this respect, the struggle has been carried out by the researchers to sustain the power quality of the microgrids with multiple areas. A dual area interconnected MG system consisting of wind and PV source is presented in [106] with real-time-based experimental setups. The performance of the proposed Social-spider optimizer (SSO)-based PID control scheme is tested with different energy storage systems in the presence of diverse solar irradiance and wind speeds. In this work, the outpower power from solar and wind have not been used for the frequency regulation due to the unique property of tracking maximum power. The output of dynamic response showed that the proposed controller is effectively participating in damping the frequency oscillations. In [107], a robust type-II fuzzy-PID AGC system for an islanded dual area MG system is proposed, where MT, DEG, and FC are mainly responsible for the power generation and balancing. The gain values of the proposed controller are obtained using the improved slap swam optimization (I-SSO) algorithm. Analysis of the suggested controller is conducted by contrasting its performance with recently developed meta-heuristic algorithm-based techniques, which has proved that the proposed regulator exhibits superior performance in multi-area standalone AC-MG system. The idea of extending the two areas stand-alone MG system to three areas MG system is proposed in [108]. Highly vulnerable sources like WTGs, parabolic trough collectors, and PV systems are used with the backup source of the diesel generator and energy storage system to make the whole system reliable. The frequency deviation is controlled utilizing the proposed MBA-based 2DOF-PID controller, which gives better synchronization among the distinctive fuel sources to keep up the required power quality. Indeed, MSAMGS is a smart idea for satisfying the power demands of remote regions, yet at the same time, certain requirements forestall the execution of MSAMGS on a large scale. A sudden fault in any area may adversely affect the operation of the whole power system. Also, the principal system cost is very high and due to the presence of RESs, the implementation of AGC in this system in the deregulated environment is difficult.
10.2. AGC in Smart Grids
Designing an AGC system for the smart grid (SG) is another prominent issue that attracted the attention of the researchers. The smart management of EVs power provides us the best opportunity to use it as a vehicle-to-grid (V2G) source for AGC regulators in an integrated power system. The authors in [109] addressed various challenges related to the integration of EVs such as uncertainty in capacity and time delay problems due to charging and discharging. A static output feedback-based H2/H∞ regulator is designed for the AGC system to provide better reference tracking to both EVs and other conventional sources for ensuring the system frequency and tie-line interchange at their minimal value. The performance of the suggested regulator is tested on single and three area power networks, which showed that the proposed controller and EVs respond intelligently in different scenarios such as load perturbation, parameters variations, dead band effects, and time delay problems. Dynamic demand response is the main aspect of the SG and is suggested for AGC models in [110]. Here the problem of controlling the domestic demands directly from the smart meters is investigated. An alternative LFC scheme is designed that measures the load frequency using the smart meters. An experimental setup is arranged to test and demonstrate the proposed LFC scheme, which revealed that for a smart meter to have a frequency response characteristic must have a speed of 3 to 200 milliseconds in measuring the system frequency. In [111], the authors presented a detailed analysis of the effect of DR control intelligence on communication delays in the LFC of a single energy system with a thermal and wind power station. In addition, line matrix linear and linear-quadratic controller (LMI-LQR) have been introduced as a link between secondary control loop and DR loop to suppress frequency oscillations and other external disturbances. The results demonstrated the ability of DR control loop for LFC performance in the SG perspective. An active power balance control strategy that stressed the integration of flexible loads and wind energy in AGC is suggested in [112]. The study revealed that the incorporation of flexible loads and wind power into the AGC system can eradicate the fluctuations via provisioning of active power support to the real-time imbalances. The betterment of the connectivity networks in a multi-area interrelated power grid for AGC problems is enlightened in [113]. Here the network mediated effects like time delay, packet loss, bandwidth, quantization, and change in communication topology are considered to examine the system efficiency. The decentralized controller and linear matrix inequality-based linear quadratic regulator are applied to reduce the dynamic performance (mean square error of states variables) of the power system as communication topology shifts. The reliability of the LFC schemes is highly vulnerable to cyber-attacks, which can amend the critical variables data of LFC system and make received data un-reliable leading to system frequency oscillations and even collapse. The authors in [114] proposed a detection scheme for the detection of cyber-attacks on actual data using the dual-source information of compromised variables. Initially, a variable observer is designed to establish a relationship among the compromised variables and know security variables. In the second phase, a Siamese network (SN) is developed to observe the relationship between characteristics of the data measured and the data observed. Finally, a detection scheme is used to detect and analyze the similarity of the dual-source data.
11. AGC in Deregulated Power Systems
Compared to the conventional power system, the deregulated power structure is divided into several different entities, namely generation (GENCOs), transmission (TRANSCOs), and distribution companies (DISCOs), and independent system operators (ISOs). These are the market players in an uncontrolled power system that controls loading and production required in a highly competitive control environment. Each DISCO has a transaction contract with GENCOs and transactions between them are managed by an ISO [12,13]. These types of transactions are divided into three types, i.e., unilateral contracts [100], bilateral contracts [75], and infringement contracts [55]. If DISCOs are contracted by the GENCOs in the same area, then it is classified as a pool-co/unilateral based transactions. If DISCOs made contract for power transaction from the GENCOs in other area, then it is known as a bilateral transaction. If DISCO break the contract and request more power than the stated value, it is known as a contract infringement operation. The contract of each GENCO with DISCO is simulated by DISCO Participation Matrix (DPM) [24]. The general form of a DPM for a two-area power system with two GENCOs and DISOCs is shown below:
The GENCO and DISCO numbers are reflected respectively in different rows and columns in the DPM matrix. Each entry of the DPM, which is the participation ratio of each GENCO to the overall DESCO demand, is represented by the contract participation factor (cpf). The diagonal and off-diagonal components in DMP matrix represent local and non-local contributions. Here, the GENCO is supposed to provide load demanded by DISCOs of the same and the other areas. The general form of the scheduled tie power flow between areas is as given by [86]:
From these equations, the ACE can be calculated using the equation given below:
The main difference in the operation of vertical structure and restructured power systems is also depicted in Figure 4. Modern energy sector analysis shows that common regulations are the most beneficial resources in a deregulated power system. However, various uncertainties and complications existing in the real power system become more severe with the effect of deregulation. Therefore, the conventional and classical control schemes for the current AGC system may not be suitable and will require a more efficient control scheme to handle the complex structure of the deregulated power system. In recent years, several research papers are published pertaining to the frequency control schemes focused on optimal and existing intelligent control approaches in the deregulated power system [19,33,35,62,115,116]. A thorough analysis on the basic operation of AGC in a multiarea power system under a deregulated scenario is presented in [19]. Eight GENCOs and DISCOs are considered as the plant model to intensify the bilateral behavior and to analyze the dynamic performance of the proposed AGC regulator. The conversion of the electricity market into a restructured market under the ISO management is primely carried out to get an independent and unforce electricity system. The authors in [115] presented a deregulated AGC regulator for a quadruple area power network incorporating reheat thermal energy system, diesel generator, gas, and hydropower system. To damp the abrupt oscillation of the frequency, the optimization of PID regulator with a low pass filter is converted to a single objective-function optimization problem considering parametric uncertainties of the system and eigenvalues. To further, improve the performance, the regulator parameters are optimized using a modified virus colony search (MVCS) algorithm. The proposed control system is tested in a large-scale deregulated power system under all possible contracts. Table 7 provides the detailed comparative of different ACG schemes in deregulated power systems.
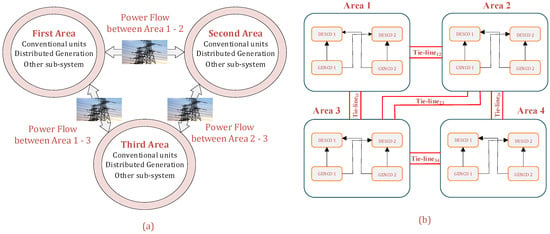
Figure 4.
Schematic diagrams for (a) three area (conventional) and (b) deregulated interconnected power systems.
Table 7.
Performance evaluation of AGC in Two area deregulated power system under different conditions.
A detailed study in [33] is conducted to examine the efficiency of RESs in a deregulated power system. The contribution of frequency controllers in two-area deregulated interconnected energy grid consisting of multiple energy sources such as doubly-fed induction generation (DFIG) and BESS is studied. Furthermore, to enhance the system’s dynamic response, in collaboration with TCPS, both DFIG and CES units are used in control areas. The proposed controller’s gains are set using the ISE methodology and output is evaluated in different contract scenarios including the violation of the contract. Analysis proved that the inertial support of the wind turbine during the load perturbation is phenomenal, which controlled the frequency oscillation and tie-line power traffic efficiently. The effects of the AC/DC lines on the AGC of an integrated multi-area system with hydro and thermal energy sources in a deregulated environment are studied in [116]. The DPM definition is addressed and a study of the eigenvalue is carried out to assess the effect of AC/DC lines on the proposed control scheme. In the proposed restructured non-linear power grid, a PI regulator is considered to analyze all potential bilateral contracts. In comparison with the controller performance of the recently created CRAZYPSO and BFOA- based PI control units, the efficacy of the proposed control is presented. The authors in [35] implemented an intelligent fuzzy-PID based AGC regulator in a dual area restructured power system using the modified sign and cosine algorithm (MSCA). An ITAS objective function is used to define the required controller gains. Furthermore, three different scenarios are considered for investigations. To analyze, the proposed regulator, settling time, overshoot and undershoot are considered as transient parameters. The superiority of MSCA based FPID AGC system is shown by comparing its outputs with the conventional PID and FPID regulators. Moreover, the robustness of the suggested regulator is showed by changing some of the important system parameters during the operations. Apart from these, there is an emergent need for a communications infrastructure to sustain the increasing variety of auxiliary resources for the efficient operation of AGC schemes after restructuring the power sector. The communication network specifications in an integrated power grid for third-party AGC services are explained in [117] and proposed models of data communication with an emphasis on queuing theory. Moreover, certain challenges are still there in the deregulated power system, such as the selection of the proper DPM and suitable non-linear control method, bandwidth limitation, and computational burden.
12. AGC and Economic Dispatch (ED)
The primary purpose of the power system operation is the continuous provisioning of interruptible power supply at the lowest possible utility rate. This task must be performed while adhering to the prescribed equilibrium of active power between the generation and the load. AGC in conjunction with LFC is reasonable to perform such activities in which LFC controls the production of the generator at all times, while ED tunes the participation factor after every several minutes to reduce the total generation cost of the system. However, the ED process is distinguished based on the time, exhibited by ED in execution. Many literature studies are available on AGC, which performs both the LFC and ED operation simultaneously [49,118,119,120]. For example, the authors in [118] provided a detailed analysis on the decentralized control system for an interconnected power system that incorporated both AGC and ED objectives and operated in a well-specified manner at a specific time. To keep the decentralized structure and make fewer modifications, two approaches are utilized, i.e., reverse engineering and forward engineering. In the first approach, the conventional AGC is studied to interpret it as a partial primal-dual gradient algorithm for solving an optimization problem. In the second approach, the optimization problem is studied to inculcate the ED factor with AGC to guarantee resource-consumer balance and economic efficiency. In the final stage, a distributed generation control technique is then proposed for AGC system. Furthermore, the engineered optimization problem shared the same optima as ED, and thereby resulting in the control technique, which inculcates ED factor automatically into AGC system. A hierarchical control scheme is suggested in the literature [49], for large-scale interrelated power grid, which utilizes a centralized control scheme at the group level and a distributed control mechanism at the coordination level. In the proposed control structure, the number of groups at the coordination level is less than the number of nodes, which minimizes the generation cost along with the reduction in oscillations of frequency and tie-line interchanges. It is worth mentioning that the optimality of ED is more likely to be at risk when a significant amount of RESs is incorporated into the generation mix, since more generation reserves are expected to be activated for frequency regulation. Furthermore, the thermal limits of the tie-line power flow are often exceeded in the presence of high penetration of RESs, which may lead to network failure. The authors in [119] proposed an AGC regulator in a distributed framework of a multi-area interconnected power system, which minimizes the real time operational cost of the power system in conjunction with the objective of reducing the area control error in the presence of violation of tie-line flow thermal constraints. The optimization formulation is established in a combined manner with the constraints, and is based on the load flow steady state conditions. An approximation of a Lagrange dual of σ−logarithmic barrier function is utilized to develop a distributed AGC structure and to obtain the controller gains as a function of fuel cost. Analysis of the proposed control structure revealed that the control law reduces the network operation cost in the presence of highly variable RESs, without risking the thermal overloads. Reference [120] provides a detailed analysis on the implementation of an AGC regulator in a 40 bus four-area non-linear interconnected power system with diverse energy generation sources that cannot be aggregated into a single generation source. An algorithm is proposed to optimally tune the individual generator parameters, accounting for the dynamics of each generator, while aggregating the generator output to match the target area output. The proposed control technique has outperformed other traditional economical AGC techniques in not only optimal allocation of control signal among the interconnected areas but also dispense the signal to each generator in every area to settle them to an optimal dispatch point. A two-stage control concept is introduced [121] that inculcates both the ED and AGC in a different fashion. In the first stage, the state estimators’ results initiate the OPF, while in the second stage, the ED is executed in conjunction with the AGC in an optimum manner. The proposed control technique is tested on three area power systems with the IEEE-118 bus system and revealed no problem in the algorithm convergence. A modified AGC approach is presented in [122] that supported ED in conjunction with frequency regulation and tie-line control problems. The frequency regulation is a decentralized control structure, while the ED is a centralized control operated on a slower scale than the former one.
13. Worldwide AGC Practices
The basic purpose of TSOs/ISOs is to procure the secondary regulatory services from ancillary markets to maintain the system frequency within the described limits by ensuring a minute-to-minute equilibrium between load and generation. In various parts of the world, AGC is being used to enable these ancillary services to ensure the long-term and short-term security of the power supply. Denmark’s National Transmission System Operator (Energinet. dk) has established a secondary regulating strategy for building larger markets of automated secondary reserves in collaboration with the German and Nordic Transmission System Operators [123]. In western Denmark, LFC is currently deployed to release primary reserves and regulate the frequency to 50 Hz. It is also used to control unintended imbalances to accomplish the desired interchange of TenneT GmbH with Western Denmark. Therefore, Energinet.dk is purchasing approximately 90 MW of LFC per month based on the maximum utilization in that month. In Germany, a decentralized AGC is implemented as there are four regions, which are operated by different TSOs. The deployment time and the control cycle time of AGC, implemented in the balancing region, as per the NERC recommendation are 5 min and 1–2 s, respectively, which are much lower than the Union for the Co-ordination of Transmission of Electricity (UCTE) recommendation of 5 s [124].
In Continental Europe (CE), the individual control actions among the synchronous areas are implemented in a decentralized fashion, which consists of AGC block and AGC areas. Further, some of the synchronous areas in a CE are interconnected and have an AGC block with a centralized control structure regulated by UCTE. Inside the interconnected power system, there is an independent AGC of each area having its control as long it does not affect the interconnected power system. Among the interconnected European power systems, the Spanish power system is one the area [67], which consists of different zones controlled by a hierarchal AGC system. The Spanish power system is interconnected with the French, Portuguese, and Moroccan power systems. In normal operation, Spanish AGC regulates its interchange power with the French system to a scheduled interchange biased by an UCTE-assigned interconnection. AGC is operated in the Spanish power system based on the results of a secondary reserve (that associated with secondary regulation) market. This market determines the amount of reserve assigned to each zone in the system and therefore the participation factor of each zone in the regulating requirements.
Similarly, there is a pluralistic AGC installed in North America, which has eight independent regions controlled by approximately 100 balancing authorities [125]. The Pennsylvania–New Jersey–Maryland Interconnection (PJM) market is previewed by RFC and SERC regions while the New-England market is previewed by the NPCC region. As per the NERC guidelines, for deployment time, in both the PJM and New England markets, AGC should be enforced within five minutes and for at least one hour. In Prince Edward Island and Saskatchewan Research Council’s Cowessess, Regina, a project under the Program of Energy Research and Development (PERD) is executed to integrate the wind power and energy storage devices into the AGC system for providing secondary regulation services. Different scenarios are performed using the 10 MW Wind R&D Park in North Cape and the Saskatchewan Research Council’s Cowessess [126], which has 800 kW Type IV wind turbine and 744 kWh battery storage connected through a 400 kW inverter. The performance is measured from the matrix of performance score of the National Research Council (NRC), Canada, and the Pennsylvania Jersey Maryland (PJM) system operator. Results in the former case shown that the wind turbines performed well in providing secondary frequency regulation. However, to provide the AGC service, it involves power curtailment. In the latter case, the use of IEC Type IV16 turbine technology has made it able to get 100 percent active power flow through the power electronics. Results have shown that the IEC Type IV wind turbine is typically capable of supplying secondary frequency control with a reasonably limited and stable error.
14. Future Scope of Work
AGC is a significant control issue in the design and operation of an interconnected power system framework, which is becoming more important as a result of growing power system size, structural changes, enormous entrance of environmentally friendly power sources, vulnerabilities and parametric varieties, different specialized and ecological limitations, and other complexities of the power system. The AGC system needs improved insight and flexibility to guarantee that, after extreme unsettling influences, it can sustain a generation-load equilibrium. The future AGC models need to have such intelligence that can handle multi-objective optimization problems with a high degree of diversification in policies, control methodologies, and have a different kind of load and generation profiles. The basis of such intelligence should be advanced information technology, flexible algorithms, and a stable networking system. In this struggle, the AGC area is enriched with valuable research contributions from time to time. The AGC design is improved significantly to handle the uncertainties, non-linearities, parametric variations, integration of different systems, for example, energy storage systems, HVDC link, wind and photovoltaic sources, and other non-conventional fuel sources. Distinctive analog and computerized control strategies for single/various areas and traditional/deregulated power systems are developed and tested. The most developed control strategies in the AGC configuration to adapt to a non-linear power system or having deficient information about the system is the development of intelligent control techniques like fuzzy logic, neural networks, as well as evolutionary and heuristic optimization techniques. In light of some completely contemplated literature, the spectrum of the future for the AGC to be further explored is given below:
- Explore AI techniques to train the AGC algorithm for activation of optimum reserves to secure the operation of the power system with large-scale integration of RESs.
- Explore and include more constraint coefficients like transmission line congestions into the objective functions to make the system more efficient in the practical scenario.
- Explore adaptive and robust control methods for the AGC to effectively handle system parametric variations.
- Explore various control techniques for AGC to perfectly predict the load and forecast the weather in large- and small-scale renewable energy-based power systems.
- An in-depth study on state estimation for AGC in real-time is required to effectively deal with the packet loss problems in the communication process.
- Susceptibilities of various AGC schemes to cyber-attacks should need to be explored further.
15. Conclusions
AGC is an integral part of the electric power system that ensures sufficient, effective, and consistent power delivery. In a deregulated power system, its importance increases as it plays a major role in power-sharing and improving energy market conditions. The key goals of AGC are to regulate the system frequency and tie-line power, while continuously monitoring the load demands in the existence of various uncertainties, system non-linearities, and in different multi-variable power system conditions, which make it a multi-objective optimization problem. This article discusses AGC’s latest advancement in traditional, deregulated, and renewable energy power systems. The paper discoursed single and multi-area power system networks. A detailed history of the development of power system AGC models is provided. Efforts are being made to cover AGC basic operation in a multi-area power system and analyzed some of the most commonly used single and multiple objective functions incorporating the ACE equations. Different classical and modern frequency control methods including optimal and suboptimal control, model predictive control, variable structure control, adaptive, robust, and digital control methods are comprehensively discussed. Furthermore, the applications of various intelligent and soft computing control mechanisms to the AGC system such as fuzzy logic, artificial intelligence, heuristics, and metaheuristic algorithms are surveyed and their merits and demerits are highlighted through tabular analysis. AGC incorporating different Energy storage and FACTS devices, and interconnection with the HVDC link is discussed in detail. The behavior of AGC is studied in the power system models incorporating various RESs for frequency regulation purposes. Moreover, the applicability of AGC in various configurations of microgrids and smart grids are investigated and a tabular summary is provided. The applications and challenges of AGC in a restructured power system is overviewed deeply. The collective control structure of AGC and ED is analyzed for ensuring the economic efficiency of the control structure. Moreover, to explore the industrial usage of the AGC in different parts of the world, a summary of worldwide AGC practices and experiences is provided in a detailed manner. Finally, the paper concluded with an emphasis on future works in the field of AGC. It is envisioned that this work will be a beneficial source for the researcher working in the field of automatic generation control.
Author Contributions
Conceptualization, K.U. and A.B.; methodology, Z.U.; software, K.U.; validation, K.U., A.B. and Z.U.; formal analysis, S.A.; investigation, Z.U.; resources, H.H.; data curation, A.B.; writing—original draft preparation, K.U. and Z.U.; writing—review and editing, S.A. and H.H.; visualization, K.U.; supervision, A.B.; project administration, S.A. and H.H.; funding acquisition, S.A. and H.H; All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
This study did not report any data.
Acknowledgments
The writers give special thanks to M. Naeem Arbab, whose helpful advice and comments significantly improved the content of the manuscript. In addition, the writers are grateful for the assistance of UET Peshawar for providing research facilities to complete the manuscript.
Conflicts of Interest
The authors declare no conflict of interests.
Appendix A
Table A1.
Nomenclature.
Table A1.
Nomenclature.
| Acronym | Definition | Acronym | Definition |
|---|---|---|---|
| AGC | Automatic generation control | FES | Flywheel energy storage |
| TSO | Transmission system operator | ISO | Independent system operator |
| AE | Aqua-electrolyzer | LTI | Linear time-invariant |
| SMES | Super magnetic energy storage system | RFC | Reliability first corporation (us) |
| RESs | Renewable energy sources | GRC | Generation rate constrains |
| BESS | Battery energy storage systems | GDB | Governor dead band |
| UPFC | Unified power flow controller | DISCOs | Distribution companies |
| MLCS | Modified load control scheme | GENCOs | Generation companies |
| DGs | Distributed generation sources | SERC | Southeastern electric reliability council (us) |
| FLC | Fuzzy logic control | TRANSCOs | Transmission companies |
| MTSA | Multiple tabu search algorithm | DPM | Disco participation matrix |
| IPFC | Interline power flow controller | ITAE | Integral time multiplied by absolute error |
| LMI | Linear matrix inequalities | AGPM | Augmented participation matrix |
| IAE | Integral of absolute error | EVs | Electrical vehicles |
| LTI | Linear time-invariant system | NPCC | Northeast power coordinating council (na) |
| GNN | Generalized neural network | SISO | Single input-single output |
References
- Kumar, P.; Kothari, D. Recent Philosophies of Automatic Generation Control Strategies in Power Systems. IEEE Trans. Power Syst. 2005, 20, 346–357. [Google Scholar]
- Shayeghi, H.; Shayanfar, H.; Jalili, A. Load frequency control strategies: A state-of-the-art survey for the researcher. Energy Convers. Manag. 2009, 50, 344–353. [Google Scholar] [CrossRef]
- Shankar, R.; Pradhan, S.; Chatterjee, K.; Mandal, R. A comprehensive state of the art literature survey on LFC mechanism for power system. Renew. Sustain. Energy Rev. 2017, 76, 1185–1207. [Google Scholar] [CrossRef]
- Pandey, S.; Mohanty, S.; Kishor, N. A literature survey on load frequency control for conventional and distribution generation power systems. Renew. Sust. Energy. Rev. 2013, 25, 318–334. [Google Scholar] [CrossRef]
- Alhelou, H.; Hamedani-Golshan, M.-E.; Zamani, R.; Heydarian-Forushani, E.; Siano, P. Challenges and Opportunities of Load Frequency Control in Conventional, Modern and Future Smart Power Systems: A Comprehensive Review. Energies 2018, 11, 2497. [Google Scholar] [CrossRef]
- Zurfi, A.; Zhang, J. Exploitation of Battery Energy Storage in Load Frequency Control -A Literature Survey. Am. J. Eng. Appl. Sci. 2016, 9, 1173–1188. [Google Scholar] [CrossRef][Green Version]
- Obaid, Z.A.; Cipcigan, L.M.; Abrahim, L.; Muhssin, M.T. Frequency control of future power systems: Reviewing and evaluating challenges and new control methods. J. Mod. Power Syst. Clean Energy 2019, 7, 9–25. [Google Scholar] [CrossRef]
- Wu, Z.; Gao, W.; Gao, T.; Yan, W.; Zhang, H.; Yan, S.; Wang, X. State-of-the-art review on frequency response of wind power plants in power systems. J. Mod. Power Syst. Clean Energy 2018, 6, 1–16. [Google Scholar] [CrossRef]
- Bevrani, H.; Hiyama, T. Intelligent Automatic Generation Control, 1st ed.; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Veronica, A.J.; Kumar, N.S. Control strategies for frequency regulation in microgrids: A review. Wind. Eng. 2019. [Google Scholar] [CrossRef]
- Bevrani, H. Robust Power System Frequency Control. Springer: New York, NY, USA, January 2009. [Google Scholar]
- Pappachen, A.; Fathima, A.P. Critical research areas on load frequency control issues in a deregulated power system: A state-of-the-art-of-review. Renew. Sustain. Energy Rev. 2017, 72, 163–177. [Google Scholar] [CrossRef]
- Brinda, M.D.; Suresh, A.; Rashmi, M. A literature survey on LFC in a deregulated electricity environment. World Rev. Sci. Technol. Sustain. Dev. 2018, 14, 1. [Google Scholar] [CrossRef]
- Cohn, N. Techniques for Improving the Control of Bulk Power Transfers on Interconnected Systems. IEEE Trans. Power Appar. Syst. 1971, PAS-90, 2409–2419. [Google Scholar] [CrossRef]
- Report, I. Dynamic Models for Steam and Hydro Turbines in Power System Studies. IEEE Trans. Power Appar. Syst. 1973, PAS-92, 1904–1915. [Google Scholar] [CrossRef]
- Tripathy, S.C.; Bhatti, T.S.; Jha, C.S.; Malik, O.P.; Hope, G.S. Sampled data automatic generation control analysis with reheat steam turbines and governor dead-band effects. IEEE Trans. Power Appar. Syst. 1984, PAS-103, 1045–1051. [Google Scholar] [CrossRef]
- Malik, O.; Hope, G.; Tripathy, S.; Mital, N. Decentralized suboptimal load-frequency control of a hydro-thermal power system using the state variable model. Elecrtr. Power Syst. Res. 1985, 8, 237–247. [Google Scholar] [CrossRef]
- Bensenouci, A.; Ghany, A. Mixed H∞/H2 with pole-placement design of robust LMI-based output feedback controllers for multi-area load frequency control. In Proceedings of the EUROCON 2007—The International Conference on “Computer as a Tool”, Warsaw, Poland, 9–12 September 2007. [Google Scholar]
- Shiva, C.K.; Mukherjee, V. Automatic generation control of multi-unit multi-area deregulated power system using a novel quasi-oppositional harmony search algorithm. IET Gener. Transm. Distrib. 2015, 9, 2398–2408. [Google Scholar] [CrossRef]
- Ross, C.; Green, T. Dynamic Performance Evaluation of a Computer Controlled Elecrtr.ric Power System. IEEE Trans. Power Appar. Syst. 1972, PAS-91, 1158–1165. [Google Scholar] [CrossRef]
- Chaturvedi, D.K.; Satsangi, P.S.; Kalra, P.K. Load frequency control: A generalised neural network approach. Int. J. Elecrtr. Rical Power Energy Syst. 1999, 21, 405–415. [Google Scholar] [CrossRef]
- Sanjeevikumar, P.; Sarojini, R.K.; Palanisamy, K.; Padmanaban, S.; Holm-Nielsen, J.B. Large Scale Renewable Energy Integration: Issues and Solutions. Energies 2019, 12, 1996. [Google Scholar]
- Kerdphol, T.; Rahman, F.S.; Mitani, Y.; Hongesombut, K.; Küfeoğlu, S. Virtual Inertia Control-Based Model Predictive Control for Microgrid Frequency Stabilization Considering High Renewable Energy Integration. Sustainability 2017, 9, 773. [Google Scholar] [CrossRef]
- Donde, V.; Pai, M.; Hiskens, I. Simulation and optimization in an AGC system after deregulation. IEEE Trans. Power Syst. 2001, 16, 481–489. [Google Scholar] [CrossRef]
- Shayeghi, H.; Shayanfar, H.; Malik, O. Robust decentralized neural networks based LFC in a deregulated power system. Elecrtr. Power Syst. Res. 2007, 77, 241–251. [Google Scholar] [CrossRef]
- Jagatheesan, K.; Anand, B.; Dey, K.N.; Ashour, A.S.; Satapathy, S.C. Performance evaluation of objective functions in automatic generation control of thermal power system using ant colony optimization technique-designed proportional–integral–derivative controller. Elecrtr. Eng. 2008, 100, 895–911. [Google Scholar] [CrossRef]
- Saikia, L.C.; Sinha, N.; Nanda, J. Maiden application of bacterial foraging based fuzzy IDD controller in AGC of a multi-area hydrothermal system. Int. J. Elecrtr. Power. Energy Syst. 2013, 45, 98–106. [Google Scholar] [CrossRef]
- Fini, M.H.; Yousefi, G.R.; Alhelou, H.H. Comparative study on the performance of many-objective and single-objective optimisation algorithms in tuning load frequency controllers of multi-area power systems. IET Gener. Trans. Distrib. 2016, 10, 2915–2923. [Google Scholar] [CrossRef]
- Alhelou, H.; Golshan, M.; Fini, M. Wind Driven Optimization Algorithm Application to Load Frequency Control in Interconnected Power Systems Considering GRC and GDB Nonlinearities. Elecrtr. Power Compon. Syst. 2018, 46, 11–12. [Google Scholar]
- Sivaramakrlshnan, A.Y.; Hariharan, M.V.; Srisailam, M.C. Design of variable-structure load-frequency controller using pole assignment technique. Int. J. Control. 1984, 40, 487–498. [Google Scholar] [CrossRef]
- Saxena, S.; Hote, Y.V. PI Controller Based Load Frequency Control Approach for Single-Area Power System Having Communication Delay. IFAC-PapersOnLine 2018, 51, 622–626. [Google Scholar] [CrossRef]
- Barisal, A.; Mishra, S. Improved PSO based automatic generation control of multi-source nonlinear power systems interconnected by AC/DC links. Cogent Eng. 2018, 5, 1422228. [Google Scholar] [CrossRef]
- Dhundhara, S.; Verma, Y.P. Evaluation of CES and DFIG unit in AGC of realistic multisource deregulated power system. Int. Trans. Elecrtr. Energy Syst. 2017, 27, e2304. [Google Scholar] [CrossRef]
- Chidembaram, I.; Paramasvam, B. Optimized load-frequency simulation in restructured power system with redox flow batteries and interline power flow controller. Int. J. Elecrtr. Power. Energy Syst. 2013, 50, 9–24. [Google Scholar] [CrossRef]
- Nayak, N.; Mishra, S.; Sharma, D.; Sahu, B.K. Application of modified sine cosine algorithm to optimally design PID/fuzzy-PID controllers to deal with AGC issues in deregulated power system. IET Gener. Transm. Distrib. 2019, 13, 2474–2487. [Google Scholar] [CrossRef]
- Dash, P.; Saikia, L.C.; Sinha, N. Comparison of performances of several FACTS devices using Cuckoo search algorithm optimized 2DOF controllers in multi-area AGC. Int. J. Elecrtr. Power Energy Syst. 2015, 65, 316–324. [Google Scholar] [CrossRef]
- Sharma, Y.; Saikia, L.C. Automatic generation control of a multi-area ST—Thermal power system using Grey Wolf Optimizer algorithm based classical controllers. Int. J. Elecrtr. Power Energy Syst. 2015, 73, 853–862. [Google Scholar] [CrossRef]
- Shiva, C.K.; Mukherjee, V. A novel quasi-oppositional harmony search algorithm for automatic generation control of power system. Appl. Soft Comput. 2015, 35, 749–765. [Google Scholar] [CrossRef]
- Vrdoljak, K.; Perić, N.; Petrović, I. Sliding mode-based load-frequency control in power systems. Elecrtr. Power Syst. Res. 2010, 80, 514–527. [Google Scholar] [CrossRef]
- Yesil, E. Interval type-2 fuzzy PID load frequency controller using Big Bang–Big Crunch optimization. Appl. Soft Comput. 2014, 15, 100–112. [Google Scholar] [CrossRef]
- Toulabi, M.; Shiroei, M.; Ranjbar, A. Robust analysis and design of power system load frequency control using the Kharitonov’s theorem. Int. J. Elecrtr. Power. Energy Syst. 2014, 55, 51–58. [Google Scholar] [CrossRef]
- Yousef, H.A.; Al-Kharusi, K.; Albadi, M.H.; Hosseinzadeh, N. Load Frequency Control of a Multi-Area Power System: An Adaptive Fuzzy Logic Approach. IEEE Trans. Power Syst. 2014, 29, 1822–1830. [Google Scholar] [CrossRef]
- Alhelou, H.H.; Golshan, M.E.H.; Hatziargyriou, N.D. A Decentralized Functional Observer Based Optimal LFC Considering Unknown Inputs, Uncertainties, and Cyber-Attacks. IEEE Trans. Power Syst. 2019, 34, 4408–4417. [Google Scholar] [CrossRef]
- Lim, K.; Wang, Y.; Zhou, R. Robust decentralised load–frequency control of multi-area power systems. IEE Proc. Gener. Transm. Distrib. 1996, 143, 377. [Google Scholar] [CrossRef]
- Magdy, G.; Shabib, G.; Elbaset, A.A.; Kerdphol, T.; Qudaih, Y.; Bevrani, H.; Mitani, Y. Tustin’s technique based digital decentralized load frequency control in a realistic multi power system considering wind farms and communications delays. Ain Shams Eng. J. 2019, 10, 327–341. [Google Scholar] [CrossRef]
- Rahmani, M.; Sadati, N. Two-level optimal load–frequency control for multi-area power systems. Int. J. Elecrtr. Power Energy Syst. 2013, 53, 540–547. [Google Scholar] [CrossRef]
- Yang, S.; Huang, C.; Yu, Y.; Yue, N.; Xie, J. Load Frequency Control of Interconnected Power System via Multi-Agent System Method. Elecrtr. Power Compon. Syst. 2017, 45, 1–13. [Google Scholar] [CrossRef]
- Rubaai, A.; Udo, V. Self-tuning load frequency control: Multilevel adaptive approach. IEEE Proc. Gener. Trans Distrib. 1994, 141, 285–290. [Google Scholar] [CrossRef]
- Xi, K.; Lin, H.X.; Shen, C.; Van Schuppen, J.H. Multilevel Power-Imbalance Allocation Control for Secondary Frequency Control of Power Systems. IEEE Trans. Autom. Control. 2020, 65, 2913–2928. [Google Scholar] [CrossRef]
- Bengiamin, N.; Chan, W. 3-level load-frequency control of power systems interconnected by asynchronous tie lines. Proc. Inst. Elecrtr. Eng. 1979, 126, 1198. [Google Scholar] [CrossRef]
- Lee, K.; Yee, H.; Teo, C. Self-tuning algorithm for automatic generation control in an interconnected power system. Elecrtr. Power Syst. Res. 1991, 20, 157–165. [Google Scholar] [CrossRef]
- Memon, A.; Memon, L.; Shaikh, A. Pole placement design for load frequency control (LFC) of an isolated power system. J. Eng. Appl. Sci. 2002, 21, 11–16. [Google Scholar]
- Saikia, L.C.; Nanda, J.; Mishra, S. Performance comparison of several classical controllers in AGC for multi-area interconnected thermal system. Int. J. Elecrtr. Power. Energy Syst. 2001, 33, 394–401. [Google Scholar] [CrossRef]
- Arya, Y.; Kumar, N. Optimal control strategy-based AGC of Elecrtrical power systems: A comparative performance analysis. Optim. Cont. Appl. Methods. 2017, 38, 982–992. [Google Scholar] [CrossRef]
- Hasan, N.; Ibraheem; Kumar, P.; Nizamuddin. Sub-optimal automatic generation control of interconnected power system using constrained feedback control strategy. Int. J. Elecrtr. Power Energy Syst. 2012, 43, 295–303. [Google Scholar] [CrossRef]
- Sahoo, S.; Jena, N.K.; Dei, G.; Sahu, B.K. Self-adaptive fuzzy-PID controller for AGC study in deregulated Power System. Indonesian. J. Elecrtr. Eng Inform. 2019, 7, 650–663. [Google Scholar]
- Kazemi, M.H.; Karrari, M.; Menhaj, M.B. Decentralized robust adaptive-output feedback controller for power system load frequency control. Elecrtr. Eng. 2002, 84, 75–83. [Google Scholar] [CrossRef]
- Al-Hamouz, Z.; Abdel-Magid, Y. Variable structure load frequency controllers for multiarea power systems. Int. J. Elecrtr. Power Energy Syst. 1993, 15, 293–300. [Google Scholar] [CrossRef]
- Mohanty, B. TLBO optimized sliding mode controller for multi-area multi-source nonlinear interconnected AGC system. Int. J. Elecrtr. Power Energy Syst. 2015, 73, 872–881. [Google Scholar] [CrossRef]
- Hamouz, Z.; Duwaish, H.; Musabi, N. Optimal design of a sliding mode AGC controller: Application to a nonlinear interconnected model. Elecrtr. Power Syst. Res. 2011, 81, 1403–1409. [Google Scholar] [CrossRef]
- Khezri, R.; Golshannavaz, S.; Shokoohi, S.; Bevrani, H. Fuzzy logic based fine-tuning approach for robust load frequency control in a multi-area power system. Electr. Power Comp. Syst. 2016, 44, 2073–2083. [Google Scholar] [CrossRef]
- Shayeghi, H.; Jalili, A.; Shayanfar, H. Robust modified GA based multi-stage fuzzy LFC. Energy Convers. Manag. 2007, 48, 1656–1670. [Google Scholar] [CrossRef]
- Elsisi, M.; Soliman, M.; Aboelela, M.; Mansour, W. Bat inspired algorithm based optimal design of model predictive load frequency control. Int. J. Electr. Power Energy Syst. 2016, 83, 426–433. [Google Scholar] [CrossRef]
- Mc Namara, P.; Milano, F. Efficient implementation of MPC-based AGC for real-world systems with low inertia. Electr. Power Syst. Res. 2018, 158, 315–323. [Google Scholar] [CrossRef]
- Zeng, G.-Q.; Xie, X.-Q.; Chen, M.-R. An Adaptive Model Predictive Load Frequency Control Method for Multi-Area Interconnected Power Systems with Photovoltaic Generations. Energies 2017, 10, 1840. [Google Scholar] [CrossRef]
- McNamara, P.; Milano, F. Model Predictive Control-Based AGC for Multi-Terminal HVDC-Connected AC grids. IEEE Trans. Power Syst. 2017, 33, 1036–1048. [Google Scholar] [CrossRef]
- Egido, I.; Fernandez-Bernal, F.; Rouco, L. The Spanish AGC System: Description and Analysis. IEEE Trans. Power Syst. 2008, 24, 271–278. [Google Scholar] [CrossRef]
- Yesil, E.; Guzelkaya, M.; Eksin, I. Self tuning fuzzy PID type load and frequency controller. Energy Convers. Manag. 2004, 45, 377–390. [Google Scholar] [CrossRef]
- Lal, D.K.; Barisal, A.K.; Tripathy, M. Grey Wolf Optimizer Algorithm Based Fuzzy PID Controller for AGC of Multi-area Power System with TCPS. Procedia Comput. Sci. 2016, 92, 99–105. [Google Scholar] [CrossRef]
- Khooban, M.H.; Niknam, T. A new intelligent online fuzzy tuning approach for multi-area load frequency control: Self Adaptive Modified Bat Algorithm. Int. J. Elecrtr. Power Energy Syst. 2015, 71, 254–261. [Google Scholar] [CrossRef]
- Azeer, S.; Ramjug-Ballgobin, R.; Hassen, S.S. Intelligent Controllers for Load Frequency Control of Two-Area Power System. IFAC-Papers On-Line 2017, 50, 301–306. [Google Scholar] [CrossRef]
- Yin, L.; Yu, T.; Zhou, L.; Huang, L.; Zhang, X.; Zheng, B. Artificial emotional reinforcement learning for automatic generation control of large-scale interconnected power grids. IET Gener. Trans. Distrib. 2017, 11, 2305–2313. [Google Scholar] [CrossRef]
- Yin, L.; Zhao, L.; Yu, T.; Zhang, X. Deep forest reinforcement learning for preventive strategy considering automatic generation control in large-scale interconnected power systems. Appl. Sci. 2018, 8, 2185. [Google Scholar] [CrossRef]
- Shayeghi, H.; Shayanfar, H. Application of ANN technique based on μ-synthesis to load frequency control of interconnected power system. Int. J. Elecrtr. Power Energy Syst. 2006, 28, 503–511. [Google Scholar] [CrossRef]
- Bevrani, H.; Hiyama, T.; Mitani, Y.; Tsuji, K.; Teshehlab, M. Load-frequency regulation under a bilateral LFC scheme using flexible neural networks. Eng. Intell. Syst. 2006, 14, 109–117. [Google Scholar]
- Hasan, N.; Nasirudin, I.; Farooq, S. Hybrid Taguchi Genetic Algorithm-Based AGC Controller for Multisource Interconnected Power System. Elecrtr. Power Syst. Res. 2019, 47, 101–112. [Google Scholar] [CrossRef]
- Jagatheesan, K.; Anand, B.; Samanta, S.; Dey, N.; Ashour, A.S.; Balas, V.E. Design of a proportional-integral-derivative controller for an automatic generation control of multi-area power thermal systems using firefly algorithm. IEEE/CAA J. Autom. Sin. 2019, 6, 503–515. [Google Scholar] [CrossRef]
- Kumar, B.V. Power System loss minimization by using UPFC placed at optimal location given by Artificial Bee Colony Algorithm. Int. J. Res. Advent Technol. 2019, 7, 127–132. [Google Scholar] [CrossRef]
- Abazari, A.; Monsef, H.; Wu, B. Coordination strategies of distributed energy resources including FESS, DEG, FC and WTG in load frequency control (LFC) scheme of hybrid isolated micro-grid. Int. J. Electr. Power Energy Syst. 2019, 109, 535–547. [Google Scholar] [CrossRef]
- Mishra, S.K.P.; Sekhar, S. Modelling of Differential Evolution Based Automatic Generation Control for Two Area Interconnected Power Systems. J. Inform. Math. Sci. 2019, 11, 19–30. [Google Scholar]
- Sahu, B.K.; Pati, S.; Panda, S. Hybrid differential evolution particle swarm optimisation optimised fuzzy proportional–integral derivative controller for automatic generation control of interconnected power system. IET Gener. Transm. Distrib. 2014, 8, 1789–1800. [Google Scholar] [CrossRef]
- Sahu, B.; Pati, S.; Mohanty, P.; Panda, S. Teaching–learning based optimization algorithm based fuzzy-PID controller for automatic generation control of multi-area power system. Int. J. Elecrtr. Power Energy Syst. 2015, 27, 240–249. [Google Scholar] [CrossRef]
- Chaine, S.; Tripathy, M. Performance of CSA optimized controllers of DFIGs and AGC to improve frequency regulation of a wind integrated hydrothermal power system. Alex. Eng. J. 2019, 58, 579–590. [Google Scholar] [CrossRef]
- Sahu, B.K.; Pati, T.K.; Nayak, J.R.; Panda, S.; Kar, S.K. A novel hybrid LUS–TLBO optimized fuzzy-PID controller for load frequency control of multi-source power system. Int. J. Electr. Power Energy Syst. 2016, 74, 58–69. [Google Scholar] [CrossRef]
- Barik, A.K.; Das, D.C. Proficient load-frequency regulation of demand response supported bio-renewable cogeneration based hybrid microgrids with quasi-oppositional selfish-herd optimisation. IET Gener. Transm. Distrib. 2019, 13, 2889–2898. [Google Scholar] [CrossRef]
- Saha, A.; Saikia, L.C. Combined application of redox flow battery and DC link in restructured AGC system in the presence of WTS and DSTS in distributed generation unit. IET Gener. Transm. Distrib. 2018, 12, 2072–2085. [Google Scholar] [CrossRef]
- Nayeripour, M.; Hoseintabar, M.; Niknam, T. Frequency deviation control by coordination control of FC and double-layer capacitor in an autonomous hybrid renewable energy power generation system. Renew. Energy 2011, 36, 1741–1746. [Google Scholar] [CrossRef]
- Yan, W.; Sheng, L.; Xu, D.; Yang, W.; Liu, Q. H∞ Robust Load Frequency Control for Multi-Area Interconnected Power System with Hybrid Energy Storage System. Appl. Sci. 2018, 8, 1748. [Google Scholar] [CrossRef]
- Kerdphol, T.; Rahman, F.S.; Mitani, Y. Virtual Inertia Control Application to Enhance Frequency Stability of Interconnected Power Systems with High Renewable Energy Penetration. Energies 2018, 11, 981. [Google Scholar] [CrossRef]
- Rakhshani, E.; Remon, D.; Cantarellas, A.; Garcia, J.M.; Rodriguez, P. Modeling and sensitivity analyses of VSP based virtual inertia controller in HVDC links of interconnected power systems. Electr. Power Syst. Res. 2016, 141, 246–263. [Google Scholar] [CrossRef]
- Shayeghi, H.; Shayanfar, H.; Jalili, A. LFC design of a deregulated power system with TCPS using PSO. Int. J. Electr. Electron. Eng. 2009, 3, 632–640. [Google Scholar]
- Ngamroo, I.; Tippayachai, J.; Dechanupaprittha, S. Robust decentralised frequency stabilisers design of static synchronous series compensators by taking system uncertainties into consideration. Int. J. Electr. Power Energy Syst. 2006, 28, 513–524. [Google Scholar] [CrossRef]
- Morsali, J.; Zare, K.; Hagh, M.T. Performance comparison of TCSC with TCPS and SSSC controllers in AGC of realistic interconnected multi-source power system. Ain Shams Eng. J. 2016, 7, 143–158. [Google Scholar] [CrossRef]
- Pathak, N.; Verma, A.; Bhatti, T.S.; Nasiruddin, I. Modeling of HVDC Tie Links and Their Utilization in AGC/LFC Operations of Multiarea Power Systems. IEEE Trans. Ind. Elecrtr. 2019, 66, 2185–2197. [Google Scholar] [CrossRef]
- Asano, H.; Yajima, K.; Kaya, Y. Influence of photovoltaic power generation on required capacity for load frequency control. IEEE Trans. Energy Convers. 1996, 11, 188–193. [Google Scholar] [CrossRef]
- Yanagawa, S.; Kato, T.; Kai, W.; Tabata, A.; Yokomizu, Y.; Okamoto, T.; Suzuoki, Y. Evaluation of LFC capacity for output fluctuation of photovoltaic power generation systems based on multi-point observation of insolation. In Proceedings of the 2001 Power Engineering Society Summer Meeting. Conference Proceedings (Cat. No.01CH37262), Vancouver, BC, Canada, 15–19 July 2001. [Google Scholar]
- Luo, H.; Hu, Z.; Zhang, H.; Chen, H. Coordinated Active Power Control Strategy for Deloaded Wind Turbines to Improve Regulation Performance in AGC. IEEE Trans. Power Syst. 2019, 34, 98–108. [Google Scholar] [CrossRef]
- Bevrani, H.; Daneshmand, P.R. Fuzzy Logic-Based Load-Frequency Control Concerning High Penetration of Wind Turbines. IEEE Syst. J. 2011, 6, 173–180. [Google Scholar] [CrossRef]
- Zhao, X.; Lin, Z.; Fu, B.; He, L.; Fang, N. Research on Automatic Generation Control with Wind Power Participation Based on Predictive Optimal 2-Degree-of-Freedom PID Strategy for Multi-area Interconnected Power System. Energies 2018, 11, 3325. [Google Scholar] [CrossRef]
- Bhatt, P.; Ghshal, S.; Roy, R. Coordinated control of TCPS and SMES for frequency regulation of interconnected restructured power systems with dynamic participation from DFIG based wind farm. Renew. Energy 2012, 40, 40–50. [Google Scholar] [CrossRef]
- Kumar, A.; Suhag, S. Effect of TCPS, SMES, and DFIG on load frequency control of a multi-area multi-source power system using multi-verse optimized fuzzy-PID controller with derivative filter. J. Vib. Control. 2018, 24, 5922–5937. [Google Scholar] [CrossRef]
- Bagheri, A.; Jabbari, A.; Mobayen, S. An intelligent ABC-based terminal sliding mode controller for load-frequency control of islanded micro-grids. Sustain. Cities Soc. 2021, 64, 102544. [Google Scholar] [CrossRef]
- Kumar, D.; Mathur, H.D.; Bhanot, S.; Bansal, R.C. Forecasting of solar and wind power using LSTM RNN for load frequency control in isolated microgrid. Int. J. Model. Simul. 2020, 1–13. [Google Scholar] [CrossRef]
- Liu, K.; He, J.; Luo, Z.; Shen, X.; Liu, X.; Lu, T. Secondary Frequency Control of Isolated Microgrid Based on LADRC. IEEE Access 2019, 7, 53454–53462. [Google Scholar] [CrossRef]
- Safari, A.; Babaei, F.; Farrokhifar, M. A load frequency control using a PSO-based ANN for micro-grids in the presence of electric vehicles. Int. J. Ambient Energy 2019, 42, 688–700. [Google Scholar] [CrossRef]
- Fergany, A.; Hameed, M. Efficient frequency controllers for autonomous two-area hybrid microgrid system using social-spider optimiser. IET Gener. Trans. Distrib. 2017, 11, 637–648. [Google Scholar] [CrossRef]
- Sahu, P.C.; Mishra, S.; Prusty, R.C.; Panda, S. Improved-salp swarm optimized type-II fuzzy controller in load frequency control of multi area islanded AC microgrid. Sustain. Energy Grids Netw. 2018, 16, 380–392. [Google Scholar] [CrossRef]
- Ranjan, S.; Das, D.; Latif, A.; Sinha, N. LFC for autonomous hybrid micro grid system of 3 unequal renewable areas using mine blast algorithm. Int. J. Renew. Energy 2018, 8, 1297–1308. [Google Scholar]
- Khan, M.; Sun, H.; Xiang, Y.; Shi, D. Electric vehicles participation in load frequency control based on mixed H2/H∞. Int. J. Electr. Power Energy Syst 2021, 125, 106420. [Google Scholar] [CrossRef]
- Samarakoon, K.; Ekanayake, J.; Jenkins, N. Investigation of Domestic Load Control to Provide Primary Frequency Response Using Smart Meters. IEEE Trans. Smart Grid 2012, 3, 282–292. [Google Scholar] [CrossRef]
- Bharti, K.; Singh, V.P.; Singh, S.P. Impact of Intelligent Demand Response for Load Frequency Control in Smart Grid Perspective. IETE J. Res. 2020, 1–12. [Google Scholar] [CrossRef]
- Basit, A.; Ahmad, T.; Ali, A.Y.; Ullah, K.; Mufti, G.; Hansen, A.D. Flexible Modern Power System: Real-Time Power Balancing through Load and Wind Power. Energies 2019, 12, 1710. [Google Scholar] [CrossRef]
- Singh, V.P.; Kishor, N.; Samuel, P. Load Frequency Control with Communication Topology Changes in Smart Grid. IEEE Trans. Ind. Inform. 2016, 12, 1943–1952. [Google Scholar] [CrossRef]
- Bi, W.; Zhang, K.; Chen, C. Cyber Attack Detection Scheme for a Load Frequency Control System Based on Dual-Source Data of Compromised Variables. Appl. Sci. 2021, 11, 1584. [Google Scholar] [CrossRef]
- Ghasemi-Marzbali, A. Multi-area multi-source automatic generation control in deregulated power system. Energy 2020, 201, 117667. [Google Scholar] [CrossRef]
- Arya, Y.; Kumar, N. AGC of a multi-area multi-source hydrothermal power system interconnected via AC/DC parallel links under deregulated environment. Int. J. Electr. Power Energy Syst. 2016, 75, 127–138. [Google Scholar] [CrossRef]
- Bevrani, H.; Mtani, Y.; Tsji, K.; Bevrani, H. Bilateral based robust load frequency control. Energy Conv. Mang. 2005, 46, 1129–1146. [Google Scholar] [CrossRef]
- Li, N.; Zhao, C.; Chen, L. Connecting automatic generation control and economic dispatch from an optimization view. IEEE Trans. Control Netw. Syst. 2015, 3, 254–264. [Google Scholar] [CrossRef]
- Patel, R.; Li, C.; Yu, X.; McGrath, B. Optimal Automatic Generation Control of an Interconnected Power System Under Network Constraints. IEEE Trans. Ind. Electron. 2018, 65, 7220–7228. [Google Scholar] [CrossRef]
- Patel, R.B.; Li, C.; Meegahapola, L.G.; McGrath, B.; Yu, X. Enhancing Optimal Automatic Generation Control in a Multi-Area Power System with Diverse Energy Resources. IEEE Trans. Power Syst. 2019, 34, 3465–3475. [Google Scholar] [CrossRef]
- Bacher, R.; Meeteren, H.P. Real-time optimal power flow in automatic generation control. IEEE Trans. Power Syst. 1988, 3, 1518–1529. [Google Scholar] [CrossRef]
- Eidson, D.; Ilic, M. Advanced generation control with economic dispatch. In Proceedings of the 1995 34th IEEE Conference on Decision and Control, New Orleans, LA, USA, 13–15 December 1995; Volume 4, pp. 3450–3458. [Google Scholar]
- Energinet.dk. Energinet.dk’s Ancillary Services Strategy; Energinet.dk, Doc. No. 77566/11 v1, Case No. 10/5553; Energinet.dk: Fredericia, Denmark, 2011. [Google Scholar]
- Balancing and Frequency Control—NERC. Available online: https://www.nerc.com/comm/OC/RSLandingPageDL/RelatedFiles/NERCBalancingandFrequencyControl040520111.pdf (accessed on 20 April 2021).
- Pandurangan, V.; Zareipour, H.; Malik, O. Frequency regulation services: A comparative study of select North American and European reserve markets. In Proceedings of the 2012 North American Power Symposium (NAPS), Champaign, IL, USA, 9–11 September 2012. [Google Scholar]
- Program of Energy Research and Development Research. Available online: https://weican.ca/docs/publications/PERDPublicSummaryReport.pdf (accessed on 20 April 2021).
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).