
A Novel Model Predictive Direct Torque Control Method for Improving Steady-State Performance of the Synchronous Reluctance Motor



Abstract
1. Introduction
2. Mathematical Model and Nonlinearity of a SynRM
2.1. Mathematical Model
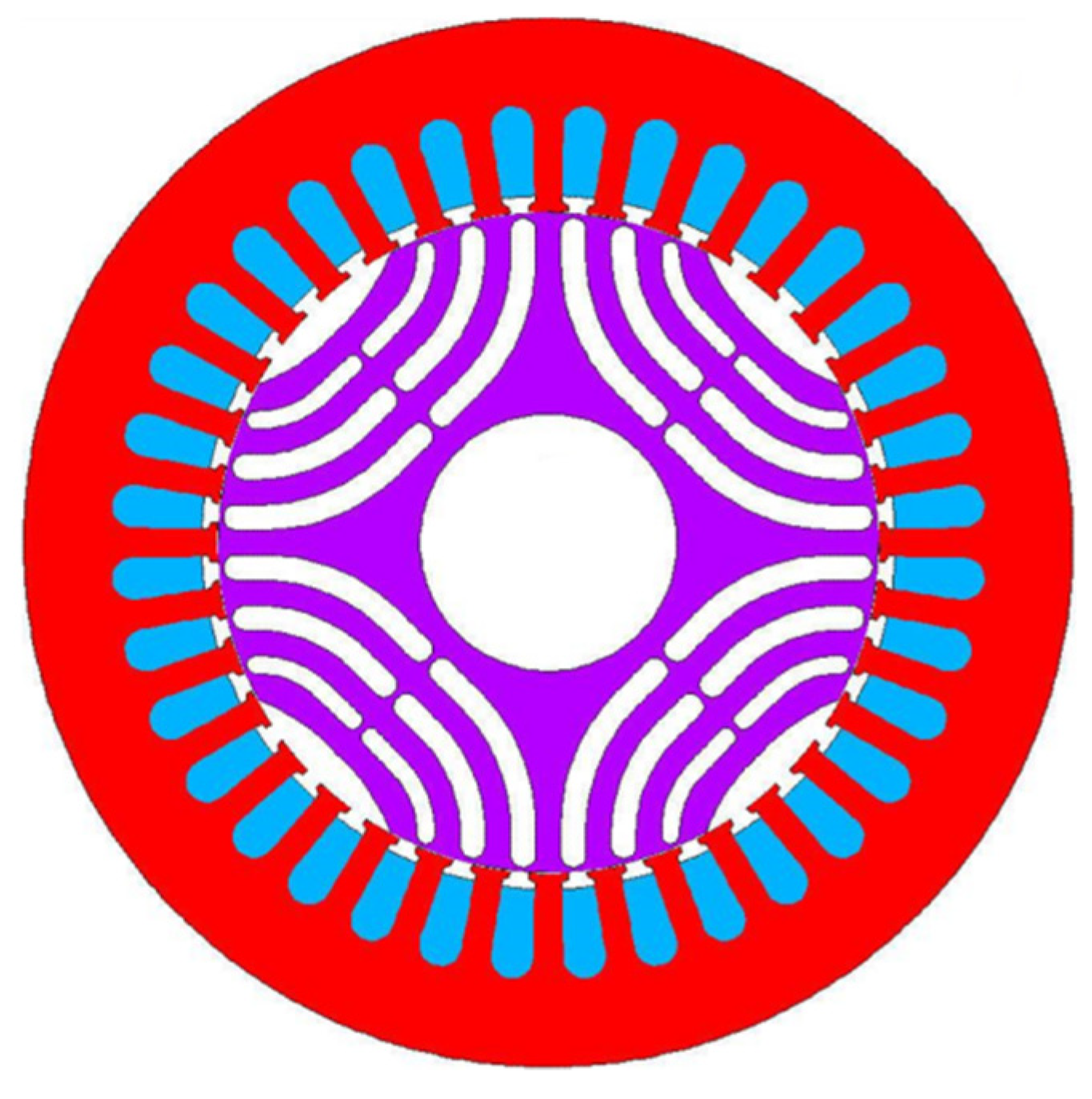
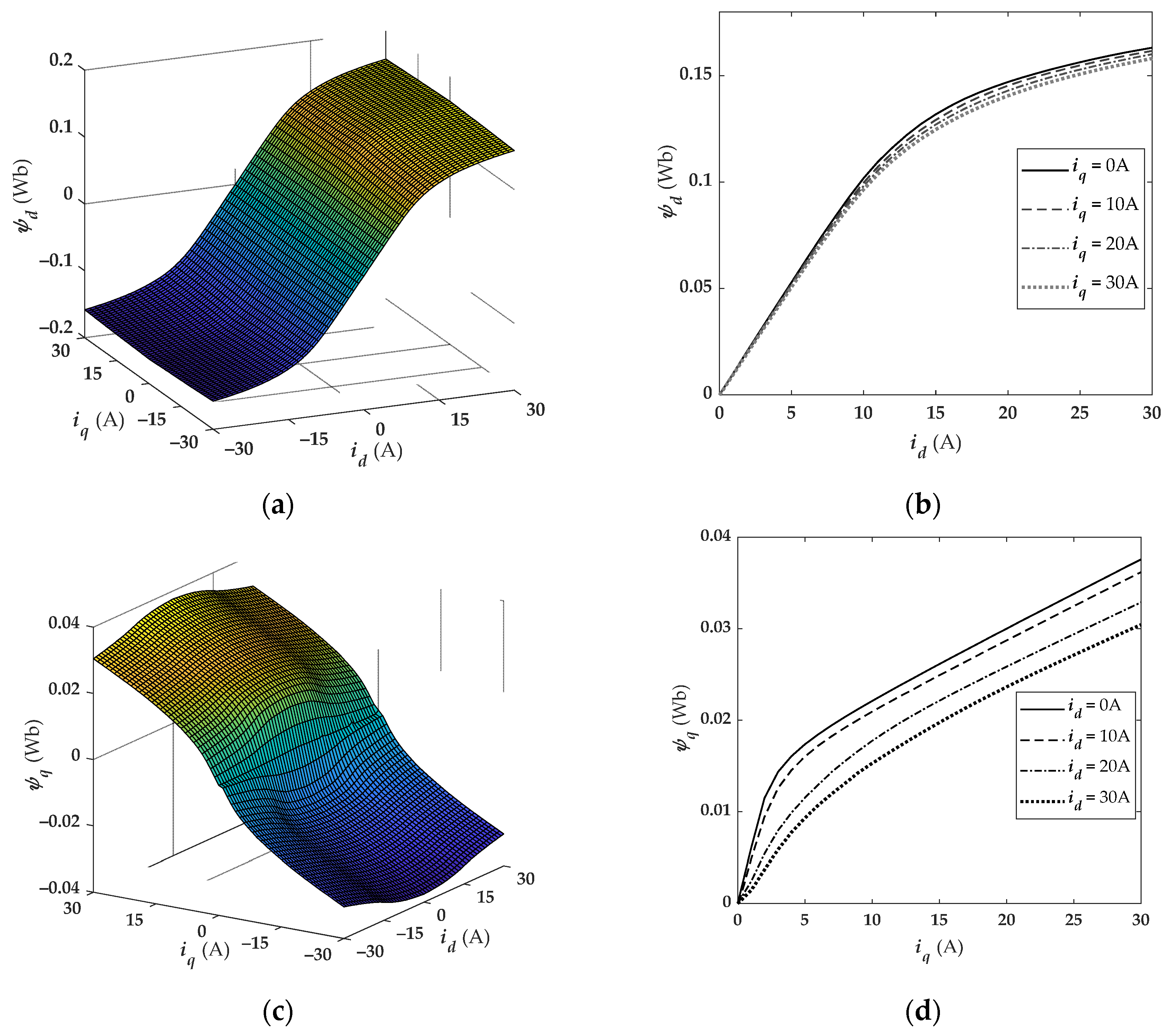
2.2. Nonlinearity of the SynRM
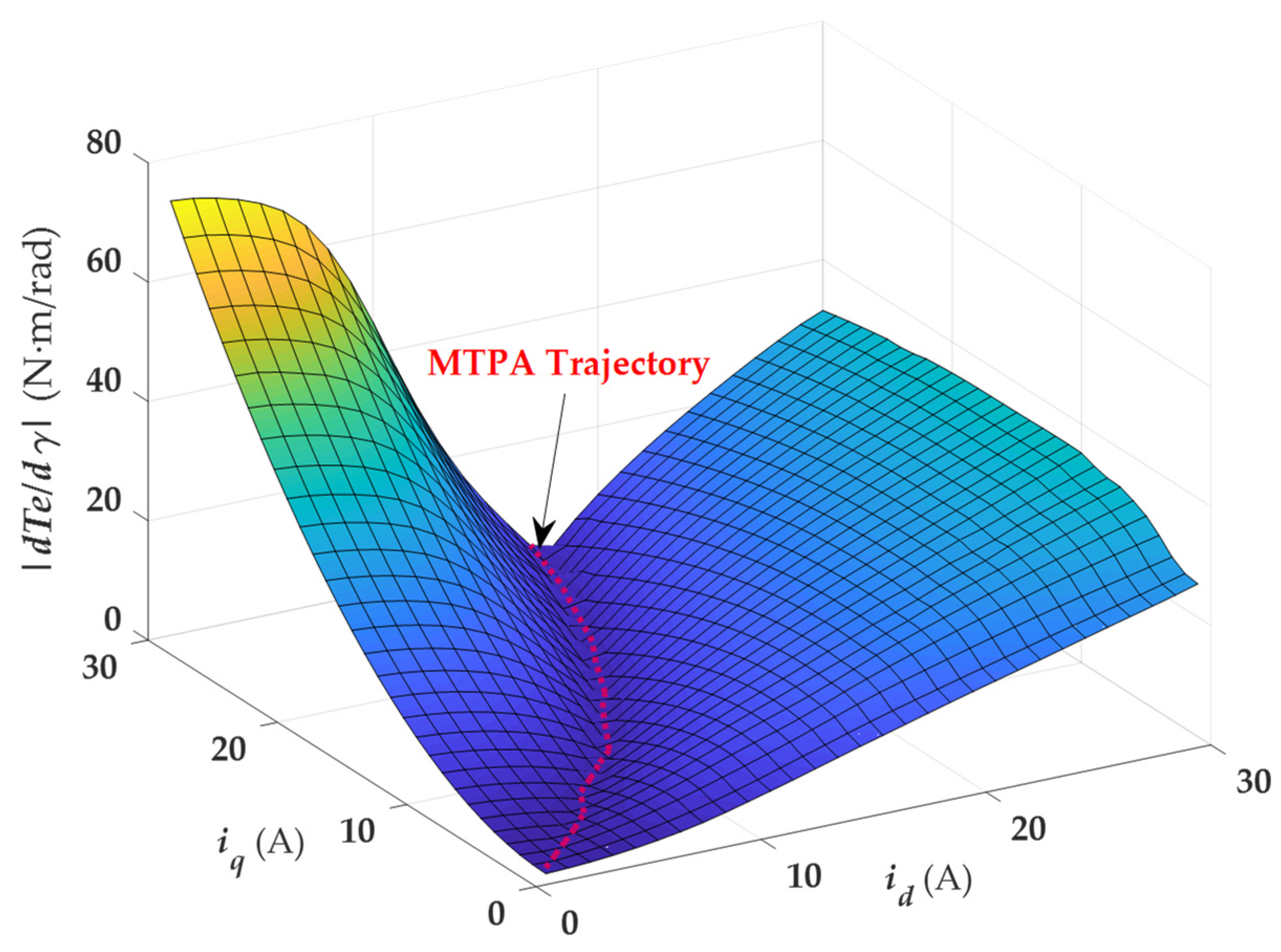
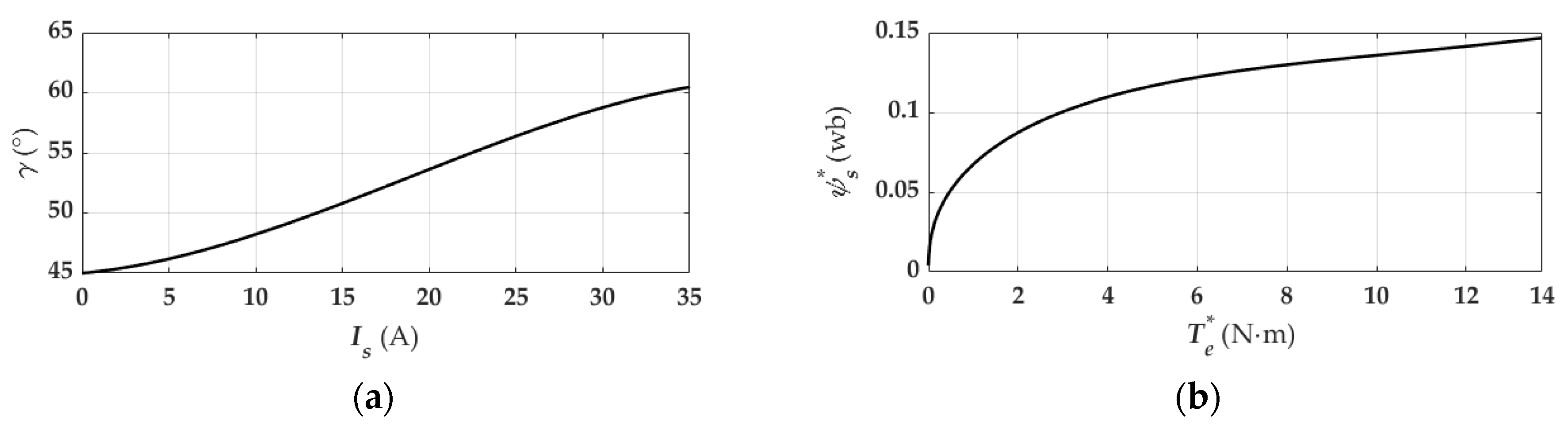
2.3. MTPA Trajectory
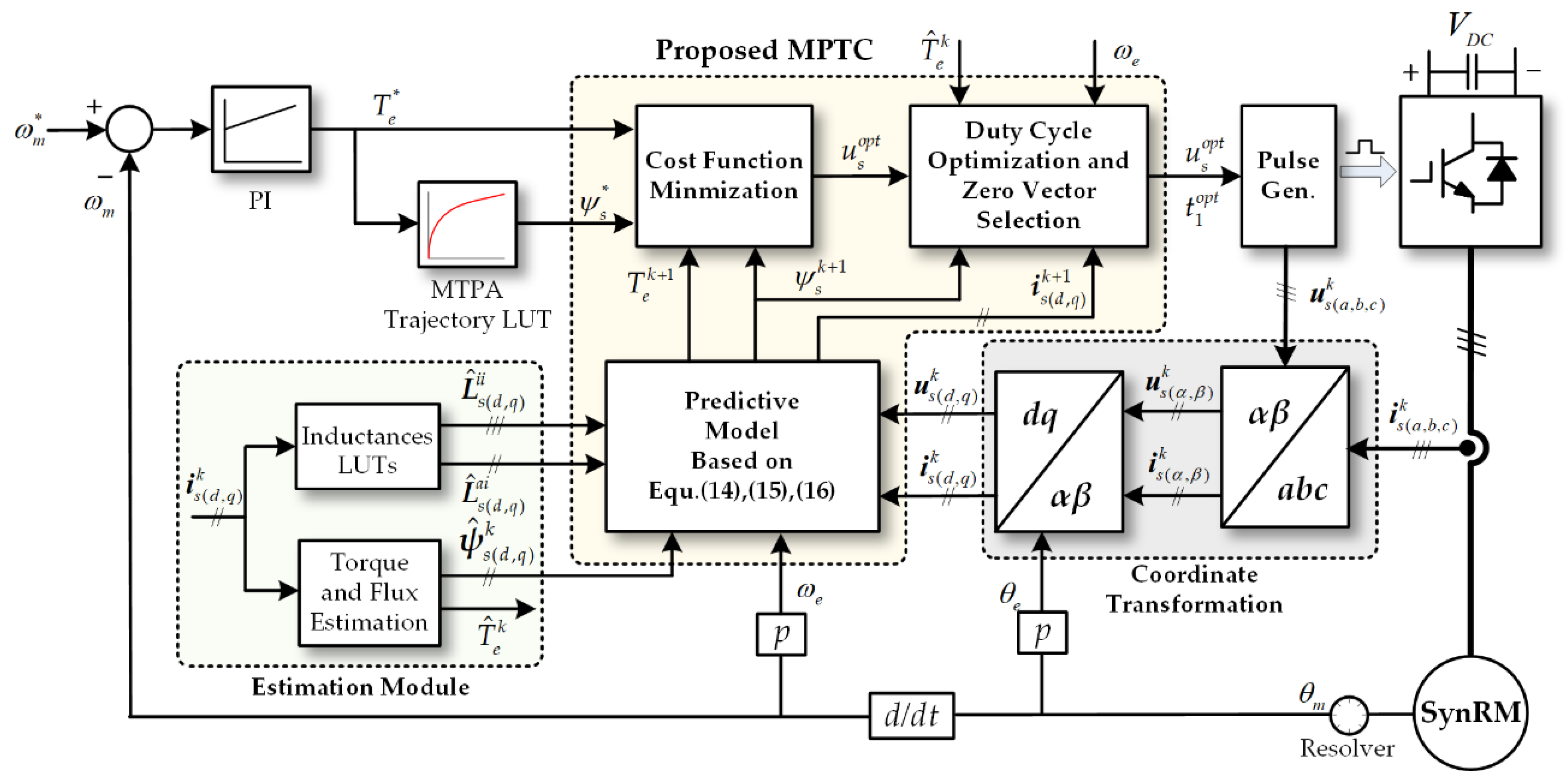
3. Proposed MPTC Method with Duty Cycle Optimization
3.1. Prediction Model and Cost Function Minimization
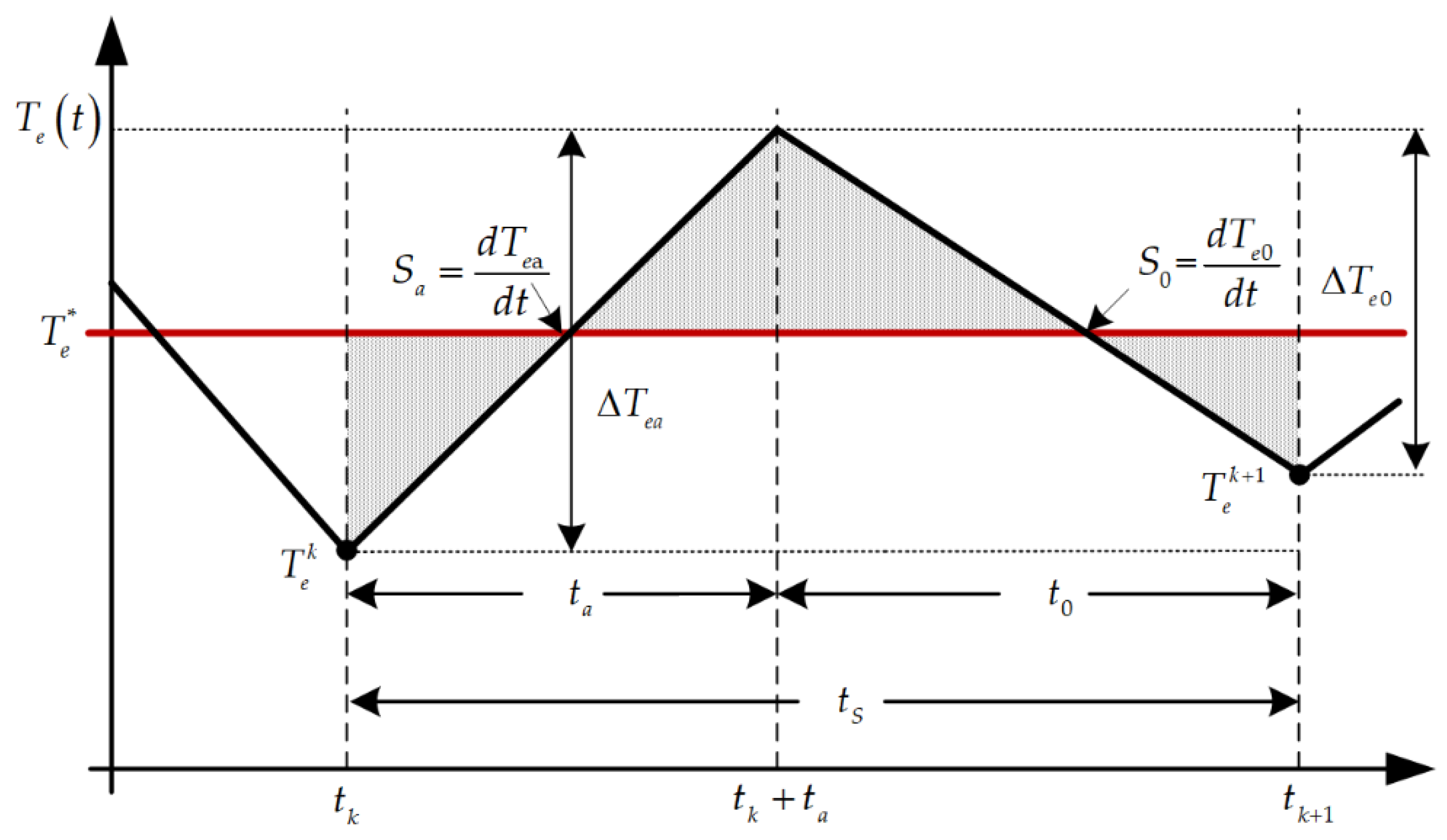
3.2. Torque Ripple Suppression with Duty Cycle Control
- (1)
- If the optimal duration obtained by (26) is in the range of [0,], it means that the system is in a steady state. The active voltage vector is applied with a duration of and the torque ripple is minimized.
- (2)
- If the calculated value of is greater than , it means that the system is not in a steady state. In this case, the is limited to and the active voltage will be applied for the whole control period to maintain the dynamic response of the system.
- (3)
- If the calculated value of is less than 0, then make and the zero vector will be applied in the whole control cycle.
3.3. Switching Frequency and Loss Reduction
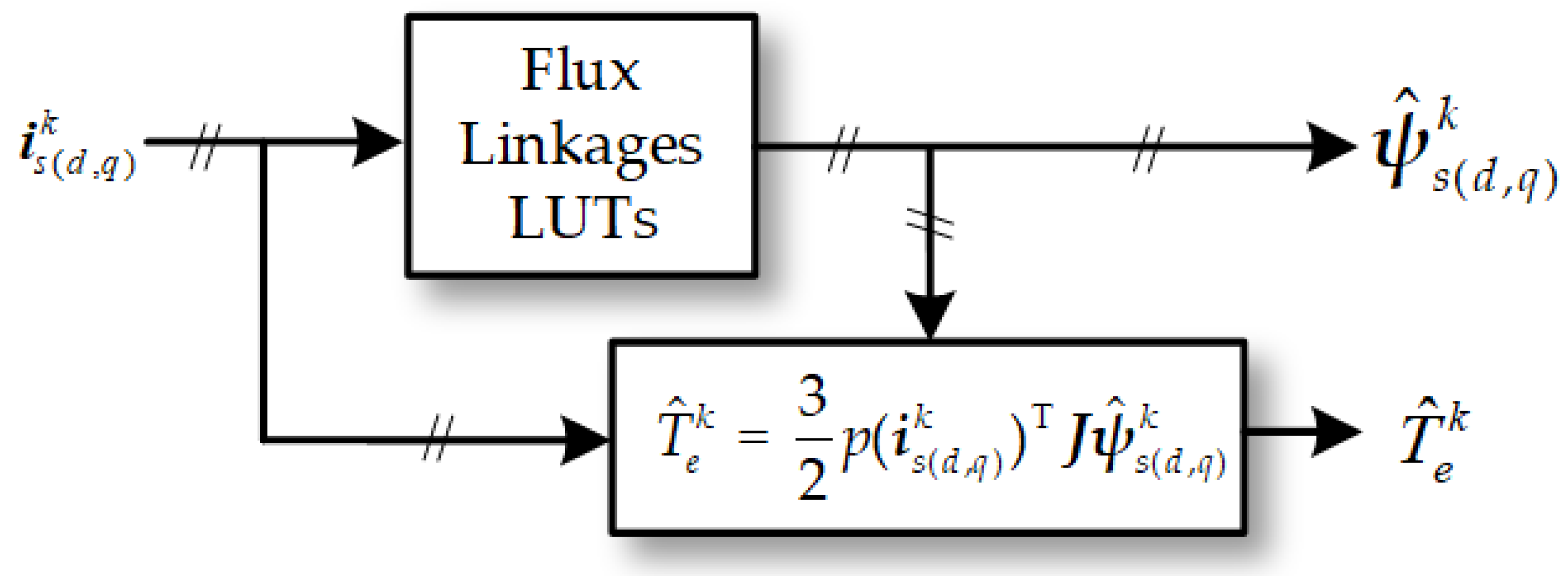
3.4. Torque and Flux Linkage Estimation
3.5. Calculation Sequence of the Control System
- (1)
- Measure and , reconstruct the optimal voltage vector , and obtain , , and by using in the kth control period.
- (2)
- Transform and in the stationary abc reference frame into and in the synchronous dq reference frame.
- (3)
- Estimate , , , and at the kth instant by using the LUTs and (2).
- (4)
- Calculate the reference torque through the PI controller and obtain by using the MTPA trajectory LUT of the torque–flux linkage.
- (5)
- Predict , , and using (14), (15), and (16).
- (6)
- Evaluate the cost function g (17) for each voltage vector of the converter and select the voltage vector with the minimized value of the cost function as the optimal voltage vector for the (k + 1)th control period.
- (7)
- Calculate the slopes and using (21) and (22) if is an active vector .
- (8)
- Obtain the optimal duration from (26) applied to and select the appropriate zero vector for the rest of the control period.
4. Experimental Platform and Results
4.1. Experimental Platform
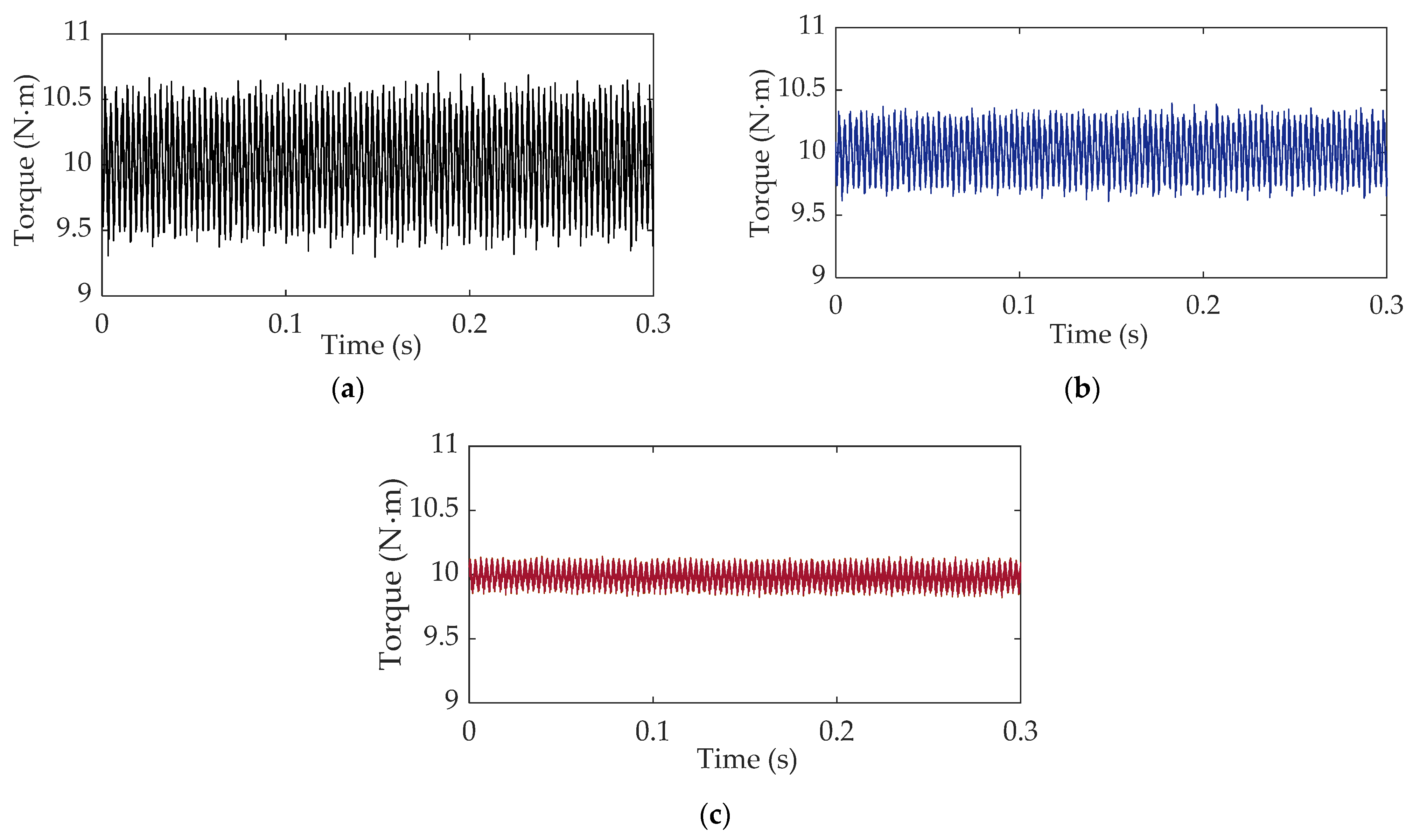
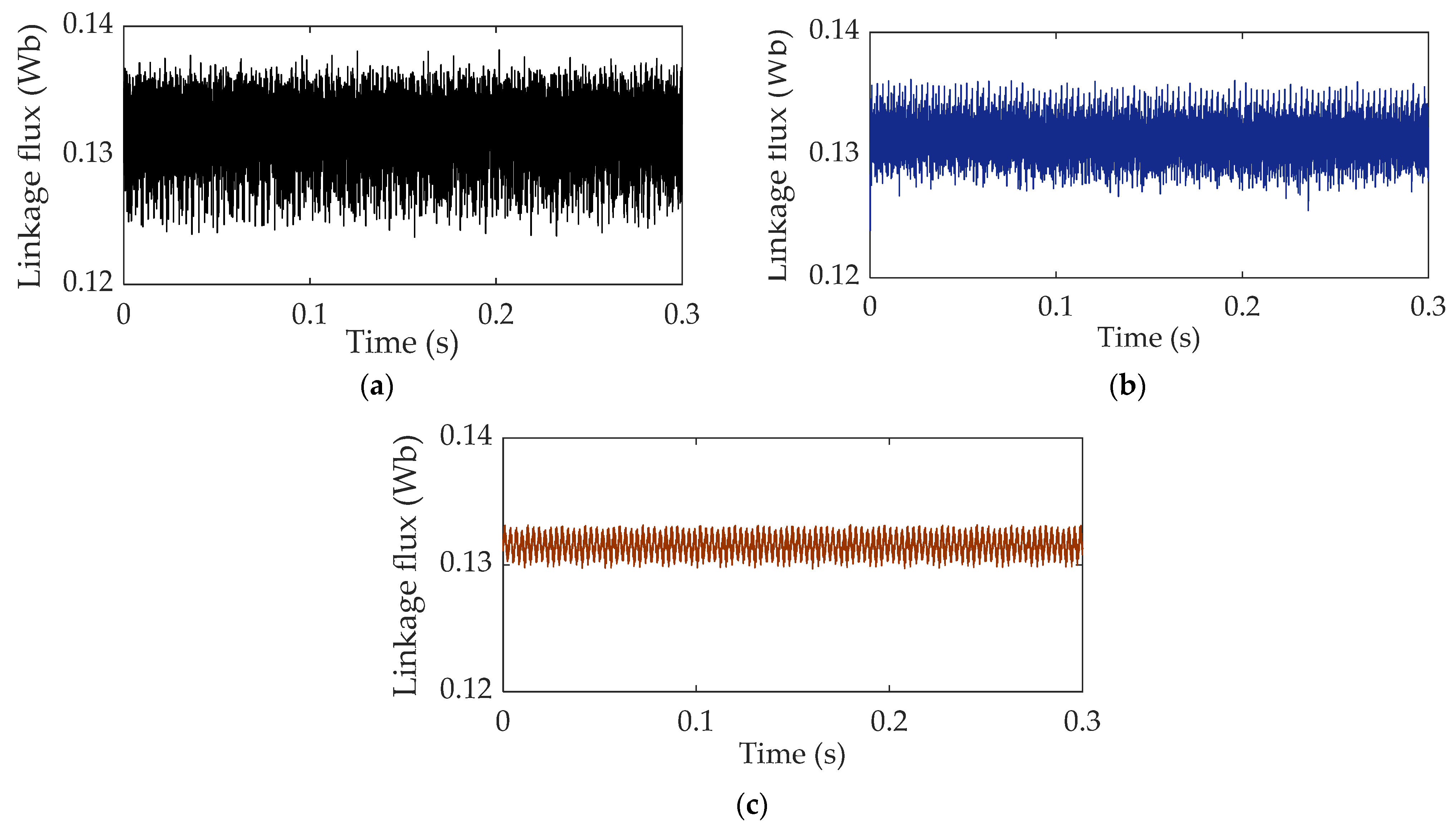
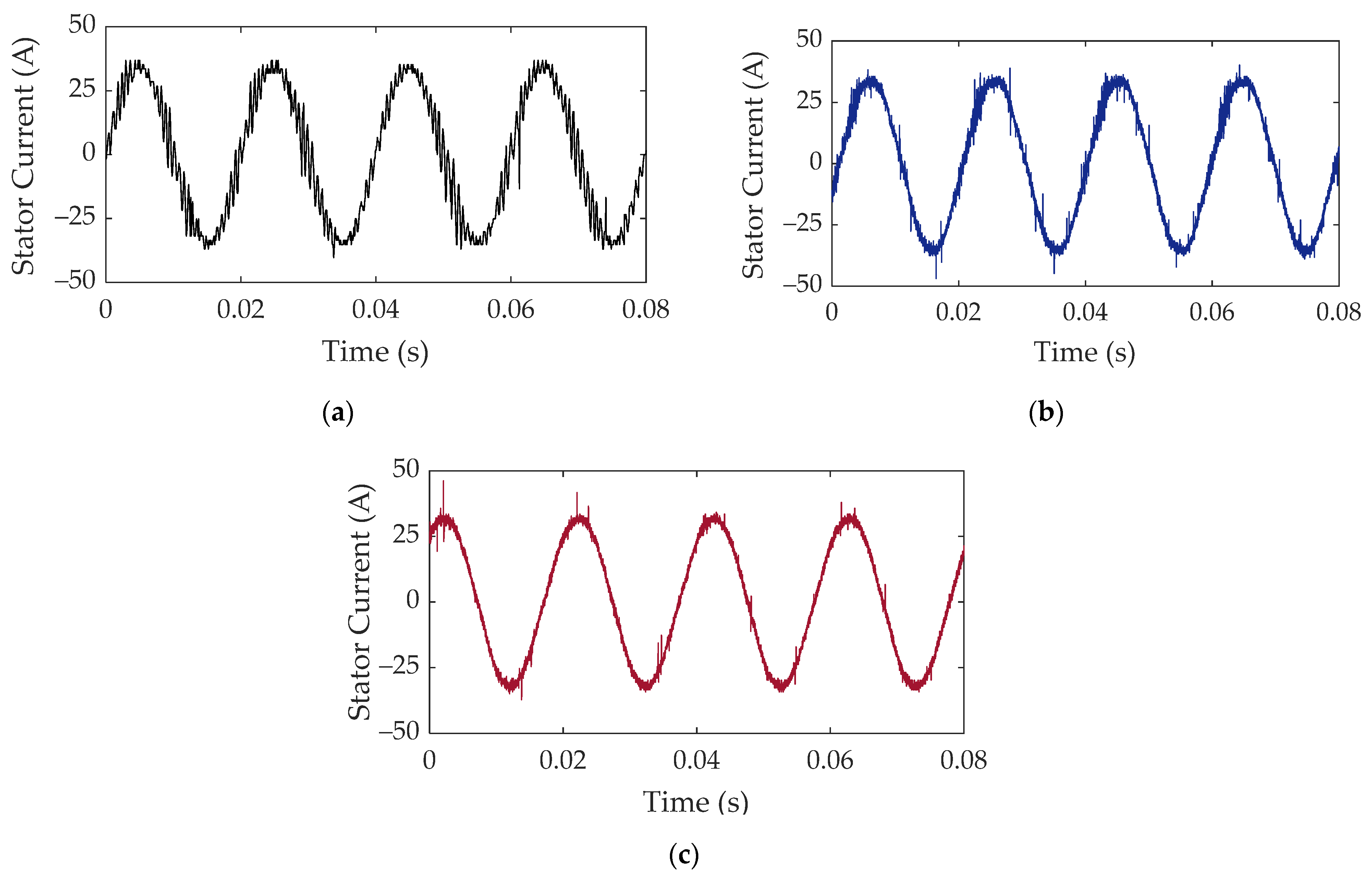
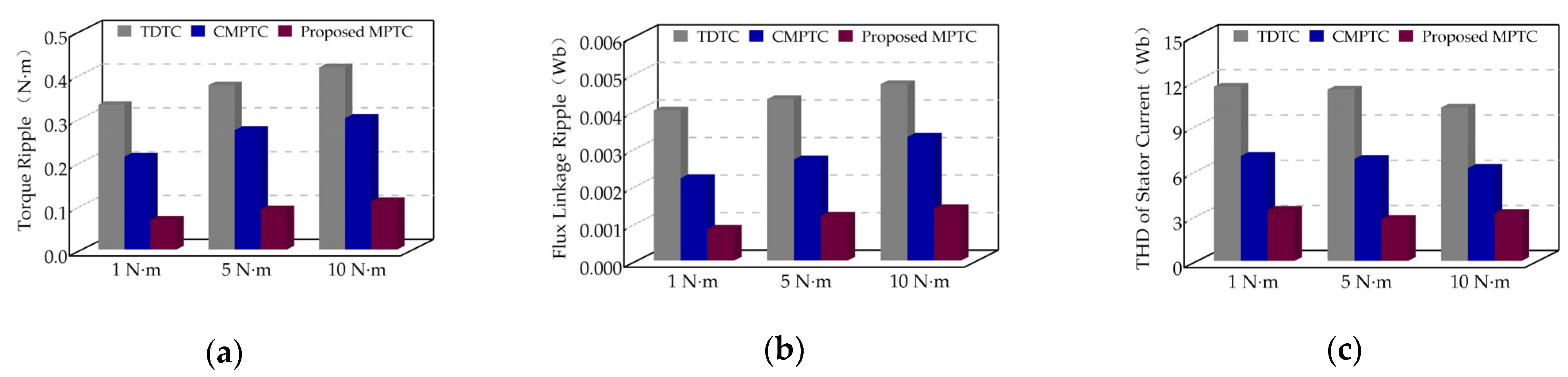
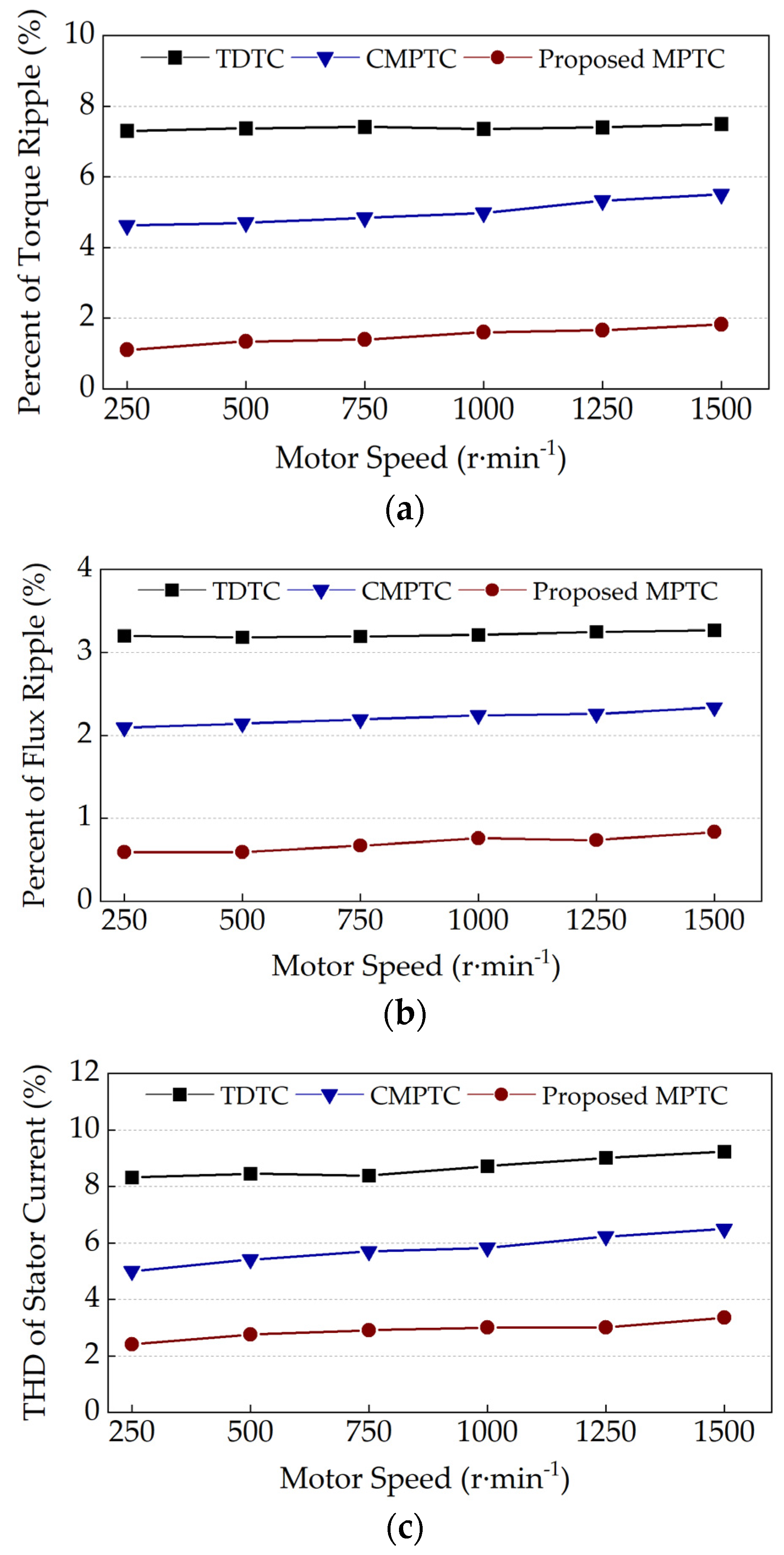
4.2. Torque and Flux Linkage Ripple Suppression Experiments
4.3. Performance Verification of the MTPA Trajectory by Considering the Saturation Characteristics
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Almeida, A.T.; Ferreira, F.J.T.E.; Baoming, G. Beyond induction motors—Technology trends to move up efficiency. IEEE Trans. Ind. Appl. 2014, 50, 2103–2114. [Google Scholar] [CrossRef]
- Ozcelik, N.G.; Dogru, U.E.; Imeryuz, M.; Ergene, L.T. Synchronous reluctance motor vs. induction motor at low-power industrial applications: Design and comparison. Energies 2019, 12, 2190. [Google Scholar] [CrossRef]
- Oliveira, F.; Ukil, A. Comparative performance analysis of induction & synchronous reluctance motors in chiller systems for energy efficient buildings. IEEE Trans. Ind. Informat. 2019, 15, 4384–4393. [Google Scholar]
- Bianchi, N.; Bolognani, S.; Carraro, E.; Castiello, M.; Fornasiero, E. Electric vehicle traction based on synchronous reluctance motors. IEEE Trans. Ind. Appl. 2016, 52, 4762–4769. [Google Scholar] [CrossRef]
- Cai, S.; Jin, M.-J.; Hao, H.; Shen, J.-X. Comparative study on synchronous reluctance and PM machines. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2016, 35, 607–623. [Google Scholar] [CrossRef]
- Takahashi, I.; Noguchi, T. A new quick-response and high-efficiency control strategy of an induction motor. IEEE Trans. Ind. Appli. 1986, 22, 820–827. [Google Scholar] [CrossRef]
- Zhong, L.; Rahman, M.F.; Hu, W.Y.; Lim, K.W.; Rahman, M.A. A direct torque controller for permanent magnet synchronous motor drives. IEEE Trans. Energy Conv. 1999, 14, 637–642. [Google Scholar] [CrossRef]
- Liu, T.H.; Hsu, H.H. Adaptive controller design for a synchronous reluctance motor drive system with direct torque control. IET Electric Power Appl. 2007, 1, 815–824. [Google Scholar] [CrossRef]
- Zhang, X.; Gilbert, H.B.F.; Mahinda Vilathgamuwa, D.; Douglas, L.M. An improved robust field-weakeaning algorithm for direct-torque-controlled synchronous-reluctance-motor drives. IEEE Trans. Ind. Electr. 2014, 62, 3255–3264. [Google Scholar] [CrossRef]
- Gilbert, H.B.F.; Zhang, X. Robust constant switching frequency-based field-weakening algorithm for direct torque controlled reluctance synchronous motors. IEEE Trans. Ind. Inform. 2016, 12, 1462–1473. [Google Scholar]
- Lai, Y.-S.; Chen, J.-H. A new approach to direct torque control of induction motor drives for constant inverter switching frequency and torque ripple reduction. IEEE Trans. Energy Convers. 2001, 16, 220–227. [Google Scholar]
- Tang, L.; Zhong, L.; Rahman, M.; Hu, Y. A novel direct torque controlled interior permanent magnet synchronous machine drive with low ripple in flux and torque and fixed switching frequency. IEEE Trans. Power Electron 2004, 19, 346–354. [Google Scholar] [CrossRef]
- Xu, X.; Wang, Y.; Shen, J. Direct Torque Control-Space Vector Modulation Control Strategy of Synchronous Reluctance Motor Based on Maximum Torque Per-Ampere. Trans. China Electrotech. Soc. 2020, 35, 246–254. [Google Scholar]
- Zhang, Y.; Zhu, J.; Xu, W.; Guo, Y. A simple method to reduce torque ripple in direct torque-controlled permanent-magnet synchronous motor by using vectors with variable amplitude and angle. IEEE Trans. Ind. Electron. 2011, 58, 2848–2859. [Google Scholar] [CrossRef]
- Kang, J.-K.; Sul, S.-K. New direct torque control of induction motor for minimum torque ripple and constant switching frequency. IEEE Trans. Ind. Appl. 1999, 35, 1076–1082. [Google Scholar] [CrossRef]
- Ren, Y.; Zhu, Z.Q.; Liu, J. Direct torque control of permanent magnet synchronous machine drives with simple duty ratio regulator. IEEE Trans. Ind. Electron. 2014, 61, 5249–5258. [Google Scholar] [CrossRef]
- Zhang, X.; Gilbert, H.B.F. A Robust Field-Weakening Algorithm Based on Duty Ratio Regulation for Direct Torque Controlled Synchronous Reluctance Motor. IEEE ASME Trans. Mech. 2016, 21, 765–773. [Google Scholar] [CrossRef]
- Gilbert, H.B.F.; Zhang, X. Robust Direct Torque Control of Synchronous Reluctance Motor Drives in the Field-Weakening Region. IEEE Trans. Power Electron. 2017, 32, 1289–1298. [Google Scholar]
- Geyer, T.; Papafotiou, G.; Morari, M. Model predictive direct torque control-part I: Concept, algorithm, and analysis. IEEE Trans. Ind. Electron. 2009, 56, 1894–1905. [Google Scholar] [CrossRef]
- Miranda, H.; Cortes, P.; Yuz, J.; Rodriguez, J. Predictive torque control of induction machines based on state-space models. IEEE Trans. Ind. Electron. 2009, 56, 1916–1924. [Google Scholar] [CrossRef]
- Cho, Y.; Lee, K.-B.; Song, J.-H.; Lee, Y.-I. Torque-ripple minimization and fast dynamic scheme for torque predictive control of permanent-magnet synchronous motors. IEEE Trans. Power Electron. 2015, 30, 2182–2190. [Google Scholar] [CrossRef]
- Pacas, M.; Weber, H. Predictive direct torque control for the PM synchronous machine. IEEE Trans. Ind. Electron. 2005, 52, 1350–1356. [Google Scholar] [CrossRef]
- Morales-Caporal, R.; Mario, P. A predictive torque control for the synchronous reluctance machine taking into account the magnetic cross saturation. IEEE Trans. Ind. Electr. 2007, 54, 1161–1167. [Google Scholar] [CrossRef]
- Varatharajan, A.; Cruz, S.; Hadla, H.; Briz, F. Predictive torque control of SynRM drives with online MTPA trajectory tracking and inductances estimation. In Proceedings of the International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–7. [Google Scholar]
- Zhang, Y.; Yang, H. Model predictive torque control of induction motor drives with optimal duty cycle control. IEEE Trans. Power Electron. 2014, 29, 6593–6603. [Google Scholar] [CrossRef]
- Adase, L.A.; Alsofyani, I.M.; Lee, K.B. Predictive Torque Control with Simple Duty-Ratio Regulator of PMSM for Minimizing Torque and Flux Ripples. IEEE Access. 2020, 8, 2373–2381. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Two-vector-based model predictive torque control without weighting factors for induction motor drives. IEEE Trans. Power Electron. 2015, 31, 1381–1390. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Generalized two-vector-based model-predictive torque control of induction motor drives. IEEE Trans. Power Electron. 2015, 30, 3818–3829. [Google Scholar] [CrossRef]
- Abad, G.; Rodriguez, M.A.; Poza, J. Two-level VSC based predictive direct torque control of the doubly fed induction machine with reduced torque and flux ripples at low constant switching frequency. IEEE Trans. Power Electron. 2008, 23, 1050–1061. [Google Scholar] [CrossRef]
- Yukinori, I.; Shigeo, M.; Masayuki, S. A Novel control scheme for maximum power operation of synchronous reluctance motors including maximum torque per flux control. IEEE Trans. Ind. Appl. 2011, 47, 115–121. [Google Scholar]
- Farhan, A.; Abdelrahem, M.; Saleh, A.; Shaltout, A.; Kennel, R. Simplified Sensorless Current Predictive Control of Synchronous Reluctance Motor Using Online Parameter Estimation. Energies 2020, 13, 492. [Google Scholar] [CrossRef]
- Farhan, A.; Abdelrahem, M.; Hackl, C.M.; Kennel, R.; Shaltout, A.; Saleh, A. Advanced Strategy of Speed Predictive Control for Nonlinear Synchronous Reluctance Motors. Machines 2020, 8, 44. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Rated power (kW) | 2 | Rated torque (N·m) | 12.7 |
| Rated voltage (V) | 42 | Rated current (A) | 36 |
| Rated speed (r·min−1) | 1500 | Number of pole pairs | 2 |
| Stator resistance (Ω) | 0.3 | Moment of inertia (kg·m−2) | 0.025 |
| Number of stator slots | 36 | Stator single slot turns | 9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Ren, L.; Liao, Z.; Lin, G. A Novel Model Predictive Direct Torque Control Method for Improving Steady-State Performance of the Synchronous Reluctance Motor. Energies 2021, 14, 2256. https://doi.org/10.3390/en14082256
Zhao Y, Ren L, Liao Z, Lin G. A Novel Model Predictive Direct Torque Control Method for Improving Steady-State Performance of the Synchronous Reluctance Motor. Energies. 2021; 14(8):2256. https://doi.org/10.3390/en14082256
Chicago/Turabian StyleZhao, Yuanzhe, Linjie Ren, Zhiming Liao, and Guobin Lin. 2021. "A Novel Model Predictive Direct Torque Control Method for Improving Steady-State Performance of the Synchronous Reluctance Motor" Energies 14, no. 8: 2256. https://doi.org/10.3390/en14082256
APA StyleZhao, Y., Ren, L., Liao, Z., & Lin, G. (2021). A Novel Model Predictive Direct Torque Control Method for Improving Steady-State Performance of the Synchronous Reluctance Motor. Energies, 14(8), 2256. https://doi.org/10.3390/en14082256