
A Review of Electric Vehicle Load Open Data and Models


Abstract
1. Introduction
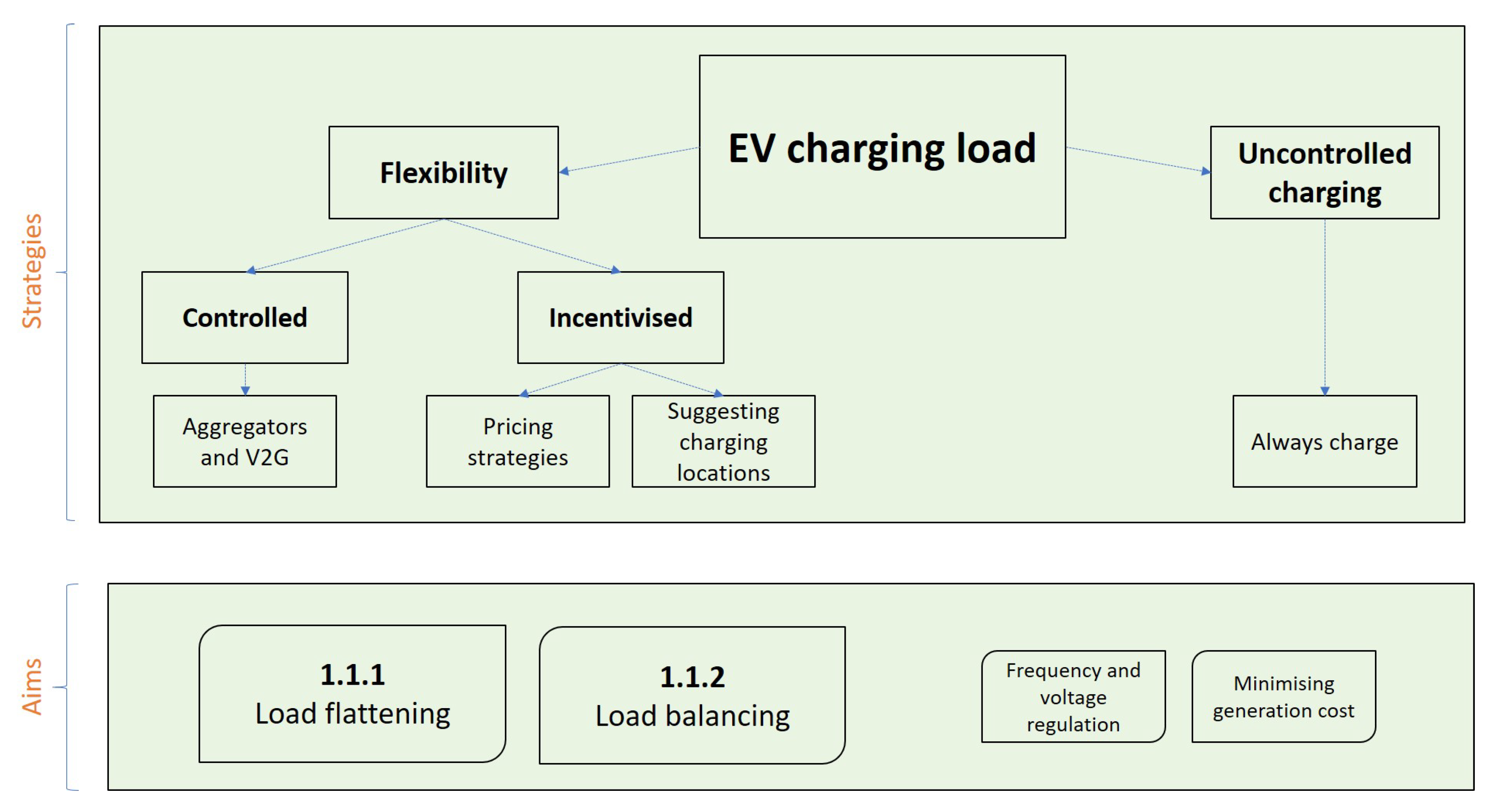
1.1. Aims and Strategies for EV Charging Schemes
1.1.1. Load Flattening
1.1.2. Load Balancing
1.2. Paper Structure and Contributions
- The results of an in-depth open data search with a structured list of datasets available for use
- A comprehensive review of EV load models including their strengths, weaknesses and their application in the literature
- A preliminary study on matching EV load models to six open datasets found in this research and not previously explored in the literature
2. EV Load and Its Main Drivers in the Literature
2.1. EV Load as a Model Output
2.1.1. Aggregated
2.1.2. Vehicle-Centric
2.1.3. EVSE-Centric
2.2. Input Data Used for EV Load Modelling
2.2.1. Battery
2.2.2. Travel
2.2.3. Weather
2.2.4. Economy
2.2.5. Calendar
3. Open Data Search
3.1. Research Criteria
3.2. Open Datasets
3.2.1. Countries with Historical Charging Session Data
Netherlands
USA
France
United Kingdom
3.2.2. Countries with Real-Time but No Historical Charging Session Data
Norway
Sweden
Finland
Germany
3.2.3. Countries with Traffic Data and No Charging Session Data
Iceland
China
Portugal
Canada
New Zealand
Japan
4. EV Load Models
4.1. Statistical Characterization
4.2. Stochastic Processes
4.2.1. Temporal
4.2.2. Spatiotemporal
4.2.3. Queuing Theory
4.3. Machine Learning
4.3.1. Linear Model
4.3.2. Support Vector Machines
4.3.3. Random Forests
4.3.4. Neural Networks
5. Matching EV Load Models to Open Datasets: A Preliminary Study
5.1. Variables and Data Quality
- Charge and/or Park Duration has to be positive and less than 24 h
- Energy Consumption needs to be positive and less than 100 kWh
5.2. Exploratory Analysis
5.3. Suggested Matching of EV Load Models with the Datasets Considered
6. Discussion and Future Work
6.1. Data Usage and Privacy Issues
6.2. Other Types of Relevant Data
6.3. Composite Approaches
6.4. Link with Optimization
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| EV | Electric Vehicle |
| ICEV | Internal Combustion Engine Vehicle |
| IEA | International Energy Agency |
| EVI | Electric Vehicle Initiative |
| EVSE | Electric Vehicle Supply Equipment |
| V2G | Vehicle-to-Grid |
| SoC | State of Charge |
| E | Energy Consumption |
| C | Battery Capacity |
| Initial State of Charge | |
| D | Distance Travelled |
| NHTS | National Household Travel Survey |
| GDP | Gross Domestic Product |
| NOAA | National Oceanic and Atmospheric Administration |
| RWI | Rheinisch-Westfälisches Institute |
| RMSE | Root Mean Squared Error |
| KDE | Kernel Density Estimator |
| GKDE | Gaussian Kernel Density Estimator |
| DKDE | Diffusion Kernel Density Estimator |
| HKDE | Hybrid Kernel Density Estimator |
| probabilty density function | |
| ARIMA | Auto-Regressive Integrated Moving Average |
| LM | Linear Model |
| SVM | Support Vector Machine |
| RF | Random Forest |
| ANN | Artificial Neural Network |
| k-NN | k-Nearest Neighbours |
| MPSF | Modified Pattern-based Sequence Forecasting |
| MLP | Multi-Layer Perceptron |
| CNN | Convolutional Neural Network |
| RNN | Recurrent Neural Network |
| LSTM | Long Short-Term Memory |
| GHG | Greenhouse Gases |
| IOT | Internet of Things |
| NILM | Non-Intrusive Load Monitoring |
Appendix A. EV Load Models

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study | Model(s) | Output Variable(s) | Approach | Input Dataset(s) |
|---|---|---|---|---|
| [8] | SVM and Monte-Carlo | Power Demand | Vehicle-centric | Beijing Olympic Games EV charging station |
| [9] | Monte-Carlo Simulation with origin destination analysis | Power Demand | Vehicle-centric | EU merge EV database |
| [12] | RF | Power Demand | Vehicle-centric and EVSE-centric | Charging sessions from Pecan Street [176] |
| [13] | Weibull and Lognormal Distributions | Charge Duration, Daily Charge Frequency, Energy Demand, Time to next charge | Vehicle-centric | Charging sessions from the Victorian EV Trial [179] |
| [14] | Gaussian Distribution | Power Demand | Vehicle-centric | NHTS daily trips [43] |
| [15] | Temporal stochastic process with scenarios | Power Demand | Vehicle-centric | EV charging load for lead-acid and lithium-ion batteries and UK National Travel Survey [180] |
| [16] | queue | Power Demand | Vehicle-centric and EVSE-centric | NHTS [43], charging sessions from the UC Davis PH&EV center [181] |
| [18] | Spatiotemporal stochastic process with uniform and poisson distributions on different schedules and state transitions | Power Demand | Vehicle-centric and aggregated | BMW Mini E (PHEV) battery characteristics from the smart grid integration project (Shanghai expo garden) |
| [24] | Beta Mixture | Number of plugged-in and plugged-out EVs, Charge Duration | Aggregated and vehicle-centric | Charging sessions from ElaadNL [69] |
| [28] | ANN, RNN, LSTM and Gated Recurrent Units (GRU) | Energy Demand | Aggregated | Charging sessions in Shenzhen |
| 29] | queue | Power Demand | Vehicle-centric and EVSE-centric | Tesla Roadster EV characteristics [182] |
| [31] | Decision trees/tables, SVM, ANN | Power Demand | Aggregated | Residential charging sessions provided by ECOtatility [146], public EVSE data pilot EV project in France |
| [32] | Spatiotemporal monte-carlo simulation based on EV trial data | Power Demand | Vehicle-centric | Charging sessions and EV journeys from the Switch EV trial |
| [33] | MPSF, SVM and RF | Energy Demand (Charging Profile) | Vehicle-centric and EVSE-centric | Charging sessions from UCLA campus data |
| [37] | ARIMA and rule-based probabilistic model | Power Demand (via the SoC after charge) | Vehicle-centric | PJM historical load data [183], EV drivers simulated data from the Power Systems Engineering Research Center [184] |
| [38] | queue | Power Demand | Vehicle-centric and EVSE-centric | EV drivers simulated data from the Power Systems Engineering Research Center [184] |
| [39] | BCMP network | Power Demand | Vehicle-centric and EVSE-centric | NHTS [43], New York State Transportation Federation Traffic Data Viewer [185] and Ontario Electricity prices 1 |
| [41] | Quantile regression, MLP and KDE | Trip Distance and Parking Duration | Vehicle-centric | Parking events derived from trip data from MiD2008 [186] |
| [44] | Monte-Carlo Simulation with copulas and scenarios | Energy Demand (via initial SoC) | Vehicle-centric | Transportation data from the Dutch Ministry of Transportation [187] |
| [49] | Lion algorithm with Niche Immunity for a CNN | Power Demand | Aggregated | Charging sessions in one charging station in Beijing |
| [123] | Gaussian Mixture | Arrival Time, Charge Duration, Energy Demand | Vehicle-centric | Charging sessions from the ACN data [85] |
| [133] | Gaussian Mixture | Clusters of EV user profiles | - | Charging sessions provided by the G4 cities of the Netherlands |
| [134] | Poisson Distribution and Gaussian Mixture | Arrival Time, Charge Duration, Energy Demand | Vehicle-centric | Charging sessions from ElaadNL [69] |
| [135] | GKDE | Daily Trip Distance and end time of last trip | Vehicle-centric | NHTS daily trips [43] |
| [136] | GKDE | Arrival Time, Charge Duration, Charge Capacity | Vehicle-centric | Charging sessions from an EV charging service company platform in Nanjing |
| [137] | GKDE and DKDE | Charge Duration and Energy Demand | Vehicle-centric | Charging sessions from UCLA campus |
| [138] | GKDE and DKDE | Charge Duration, Energy Demand | Vehicle-centric | Charging sessions from UCLA campus and from My Electric Avenue Project trial [188] |
| [139] | HKDE | Charge Duration and Energy Demand | Vehicle-centric | Charging sessions from UCLA campus and from My Electric Avenue Project trial [188] |
| [140] | 3-state temporal Markov Chain | Energy Demand | Vehicle-centric | - |
| [141] | ARIMA and rule-based probabilistic model | Power Demand (via the SoC after charge) | Vehicle-centric | PJM historical load data [183] |
| [142] | queue | Power Demand | Vehicle-centric and EVSE-centric | Traffic fluid model [189] |
| [147] | MPSF, kNN, SVM and RF | Energy Demand | EVSE-centric | Charging sessions from UCLA campus data |
| [148] | Mean estimation and Linear Regression | Energy Demand (Charging Profile) | Vehicle-centric | Charging sessions from UCLA campus data |
| [149] | Linear Regression, Gradient Boosting, ANN | Departure time | Vehicle-centric | EV charging records from SAP Walldorf |
| [150] | Linear Regression | Power Demand (Charging Speed) | Aggregated | Charging sessions from EVNET and NUON energy providers in Amsterdam |
| [151] | RF, SVM and Decition tree | Energy Demand (Charging capacity) | EVSE-centric | Charging sessions in Shenzhen |
| [152] | ANN, RNN, GRU, Stacked auto-encoders and LSTM | Power Demand | Aggregated | Charging sessions in Shenzhen |
References
- International Energy Agency. Global EV Outlook 2019: Scaling-Up the Transition to Electric Mobility; OECD: Paris, France, 2019. [Google Scholar] [CrossRef]
- Kvisle, H. The Norwegian Charging Station Database for Electromobility (NOBIL). World Electr. Veh. J. 2012, 5, 702–707. [Google Scholar] [CrossRef]
- International Energy Agency. Electric Vehicle Stock in the EV30@30 Scenario. Library Catalog. Available online: www.iea.org (accessed on 13 April 2021).
- Clean Energy Ministerial. Electric Vehicles Initiative. Available online: www.cleanenergyministerial.org/initiative-clean-energy-ministerial/electric-vehicles-initiative (accessed on 17 March 2021).
- Galus, M.D.; Vayá, M.G.; Krause, T.; Andersson, G. The role of electric vehicles in smart grids: The role of electric vehicles in smart grids. Wiley Interdiscip. Rev. Energy Environ. 2013, 2, 384–400. [Google Scholar] [CrossRef]
- Lopez, K.L.; Gagne, C.; Gardner, M.A. Demand-Side Management Using Deep Learning for Smart Charging of Electric Vehicles. IEEE Trans. Smart Grid 2019, 10, 2683–2691. [Google Scholar] [CrossRef]
- Fachrizal, R.; Shepero, M.; van der Meer, D.; Munkhammar, J.; Widén, J. Smart charging of electric vehicles considering photovoltaic power production and electricity consumption: A review. eTransportation 2020, 4, 100056. [Google Scholar] [CrossRef]
- Xydas, E.S.; Marmaras, C.E.; Cipcigan, L.M.; Hassan, A.S.; Jenkins, N. Forecasting Electric Vehicle charging demand using Support Vector Machines. In Proceedings of the 2013 48th International Universities’ Power Engineering Conference (UPEC), Dublin, Ireland, 2–5 September 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Mu, Y.; Wu, J.; Jenkins, N.; Jia, H.; Wang, C. A Spatial–Temporal model for grid impact analysis of plug-in electric vehicles. Appl. Energy 2014, 114, 456–465. [Google Scholar] [CrossRef]
- Tie, S.F.; Tan, C.W. A review of energy sources and energy management system in electric vehicles. Renew. Sustain. Energy Rev. 2013, 20, 82–102. [Google Scholar] [CrossRef]
- Yamashita, K.; Li, J.; Zhang, P.; Liu, C.C. Analysis and control of major blackout events. In Proceedings of the 2009 IEEE/PES Power Systems Conference and Exposition, Seattle, WA, USA, 15–18 March 2009; pp. 1–4. [Google Scholar] [CrossRef]
- Gerossier, A.; Girard, R.; Kariniotakis, G. Modeling and Forecasting Electric Vehicle Consumption Profiles. Energies 2019, 12, 1341. [Google Scholar] [CrossRef]
- Khoo, Y.B.; Wang, C.H.; Paevere, P.; Higgins, A. Statistical modeling of Electric Vehicle electricity consumption in the Victorian EV Trial, Australia. Transp. Res. Part D Transp. Environ. 2014, 32, 263–277. [Google Scholar] [CrossRef]
- Sun, K.; Sarker, M.R.; Ortega-Vazquez, M.A. Statistical characterization of electric vehicle charging in different locations of the grid. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Modeling of Load Demand Due to EV Battery Charging in Distribution Systems. IEEE Trans. Power Syst. 2011, 26, 802–810. [Google Scholar] [CrossRef]
- Alizadeh, M.; Scaglione, A.; Davies, J.; Kurani, K.S. A Scalable Stochastic Model for the Electricity Demand of Electric and Plug-In Hybrid Vehicles. IEEE Trans. Smart Grid 2014, 5, 848–860. [Google Scholar] [CrossRef]
- Xu, N.Z.; Chung, C.Y. Challenges in Future Competition of Electric Vehicle Charging Management and Solutions. IEEE Trans. Smart Grid 2015, 6, 1323–1331. [Google Scholar] [CrossRef]
- Jiang, H.; Ren, H.; Sun, C.; Watts, D. The temporal-spatial stochastic model of plug-in hybrid electric vehicles. In Proceedings of the 2017 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Torino, Italy, 26–29 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Richardson, D.B. Electric vehicles and the electric grid: A review of modeling approaches, Impacts, and renewable energy integration. Renew. Sustain. Energy Rev. 2013, 19, 247–254. [Google Scholar] [CrossRef]
- Heydt, G.T. The impact of electric vehicle deployment on load management straregies. IEEE Trans. Power Appar. Syst. 1983, 5, 1253–1259. [Google Scholar] [CrossRef]
- Sadeghianpourhamami, N.; Refa, N.; Strobbe, M.; Develder, C. Quantitive analysis of electric vehicle flexibility: A data-driven approach. Int. J. Electr. Power Energy Syst. 2018, 95, 451–462. [Google Scholar] [CrossRef]
- Kara, E.C.; Macdonald, J.S.; Black, D.; Bérges, M.; Hug, G.; Kiliccote, S. Estimating the benefits of electric vehicle smart charging at non-residential locations: A data-driven approach. Appl. Energy 2015, 155, 515–525. [Google Scholar] [CrossRef]
- Kempton, W.; Letendre, S.E. Electric vehicles as a new power source for electric utilities. Transp. Res. Part D Transp. Environ. 1997, 2, 157–175. [Google Scholar] [CrossRef]
- Flammini, M.G.; Prettico, G.; Julea, A.; Fulli, G.; Mazza, A.; Chicco, G. Statistical characterisation of the real transaction data gathered from electric vehicle charging stations. Electr. Power Syst. Res. 2019, 166, 136–150. [Google Scholar] [CrossRef]
- Saldaña, G.; San Martin, J.I.; Zamora, I.; Asensio, F.J.; Oñederra, O. Electric Vehicle into the Grid: Charging Methodologies Aimed at Providing Ancillary Services Considering Battery Degradation. Energies 2019, 12, 2443. [Google Scholar] [CrossRef]
- Chokkalingam, B.; Padmanaban, S.; Siano, P.; Krishnamoorthy, R.; Selvaraj, R. Real-Time Forecasting of EV Charging Station Scheduling for Smart Energy Systems. Energies 2017, 10, 377. [Google Scholar] [CrossRef]
- Ahmed, M.A.; El-Sharkawy, M.R.; Kim, Y.C. Remote Monitoring of Electric Vehicle ChargingStations in Smart Campus Parking Lot. J. Mod. Power Syst. Clean Energy 2020, 8, 124–132. [Google Scholar] [CrossRef]
- Zhu, J.; Yang, Z.; Guo, Y.; Zhang, J.; Yang, H. Short-Term Load Forecasting for Electric Vehicle Charging Stations Based on Deep Learning Approaches. Appl. Sci. 2019, 9, 1723. [Google Scholar] [CrossRef]
- Garcia-Valle, R.; Vlachogiannis, J.G. Letter to the Editor: Electric Vehicle Demand Model for Load Flow Studies. Electr. Power Components Syst. 2009, 37, 577–582. [Google Scholar] [CrossRef]
- Olivella-Rosell, P.; Villafafila-Robles, R.; Sumper, A.; Bergas-Jané, J. Probabilistic Agent-Based Model of Electric Vehicle Charging Demand to Analyse the Impact on Distribution Networks. Energies 2015, 8, 4160–4187. [Google Scholar] [CrossRef]
- Xydas, S.; Marmaras, C.; Cipcigan, L.; Hassan, A.; Jenkins, N. Electric Vehicle Load Forecasting using Data Mining Methods. In Proceedings of the Hybrid and Electric Vehicles Conference (HEVC), London, UK, 6–7 November 2013; Institution of Engineering and Technology: London, UK, 2013; p. 10.1. [Google Scholar] [CrossRef]
- Neaimeh, M.; Wardle, R.; Jenkins, A.M.; Yi, J.; Hill, G.; Lyons, P.F.; Hübner, Y.; Blythe, P.T.; Taylor, P.C. A probabilistic approach to combining smart meter and electric vehicle charging data to investigate distribution network impacts. Appl. Energy 2015, 157, 688–698. [Google Scholar] [CrossRef]
- Majidpour, M.; Qiu, C.; Chu, P.; Pota, H.R.; Gadh, R. Forecasting the EV charging load based on customer profile or station measurement? Appl. Energy 2016, 163, 134–141. [Google Scholar] [CrossRef]
- Li, J.; Klee Barillas, J.; Guenther, C.; Danzer, M.A. A comparative study of state of charge estimation algorithms for LiFePO4 batteries used in electric vehicles. J. Power Sources 2013, 230, 244–250. [Google Scholar] [CrossRef]
- Topić, J.; Škugor, B.; Deur, J. Neural Network-Based Modeling of Electric Vehicle Energy Demand and All Electric Range. Energies 2019, 12, 1396. [Google Scholar] [CrossRef]
- Amini, M.H.; Moghaddam, M.P. Probabilistic modelling of electric vehicles’ parking lots charging demand. In Proceedings of the 2013 21st Iranian Conference on Electrical Engineering (ICEE), Mashhad, Iran, 14–16 May 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Amini, M.; Karabasoglu, O.; Ilic, M.D.; Boroojeni, K.G.; Iyengar, S.S. ARIMA-based demand forecasting method considering probabilistic model of electric vehicles’ parking lots. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Li, G.; Zhang, X.P. Modeling of Plug-in Hybrid Electric Vehicle Charging Demand in Probabilistic Power Flow Calculations. IEEE Trans. Smart Grid 2012, 3, 492–499. [Google Scholar] [CrossRef]
- Liang, H.; Sharma, I.; Zhuang, W.; Bhattacharya, K. Plug-in electric vehicle charging demand estimation based on queueing network analysis. In Proceedings of the 2014 IEEE PES General Meeting|Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Paevere, P.; Higgins, A.; Ren, Z.; Horn, M.; Grozev, G.; McNamara, C. Spatio-temporal modelling of electric vehicle charging demand and impacts on peak household electrical load. Sustain. Sci. 2014, 9, 61–76. [Google Scholar] [CrossRef]
- Huber, J.; Dann, D.; Weinhardt, C. Probabilistic forecasts of time and energy flexibility in battery electric vehicle charging. Appl. Energy 2020, 262, 114525. [Google Scholar] [CrossRef]
- Wang, H. Energy consumption of electric vehicles based on real-world driving patterns: A case study of Beijing. Appl. Energy 2015, 157, 710–719. [Google Scholar] [CrossRef]
- National Household Travel Survey. Available online: nhts.ornl.gov (accessed on 17 March 2021).
- Lojowska, A.; Kurowicka, D.; Papaefthymiou, G.; van der Sluis, L. Stochastic Modeling of Power Demand Due to EVs Using Copula. IEEE Trans. Power Syst. 2012, 27, 1960–1968. [Google Scholar] [CrossRef]
- Hong, T.; Fan, S. Probabilistic electric load forecasting: A tutorial review. Int. J. Forecast. 2016, 32, 914–938. [Google Scholar] [CrossRef]
- Gaillard, P.; Goude, Y.; Nedellec, R. Additive models and robust aggregation for GEFCom2014 probabilistic electric load and electricity price forecasting. Int. J. Forecast. 2016, 32, 1038–1050. [Google Scholar] [CrossRef]
- Xydas, E.; Marmaras, C.; Cipcigan, L.M.; Jenkins, N.; Carroll, S.; Barker, M. A data-driven approach for characterising the charging demand of electric vehicles: A UK case study. Appl. Energy 2016, 162, 763–771. [Google Scholar] [CrossRef]
- Arias, M.B.; Bae, S. Electric vehicle charging demand forecasting model based on big data technologies. Appl. Energy 2016, 183, 327–339. [Google Scholar] [CrossRef]
- Li, Y.; Huang, Y.; Zhang, M. Short-Term Load Forecasting for Electric Vehicle Charging Station Based on Niche Immunity Lion Algorithm and Convolutional Neural Network. Energies 2018, 11, 1253. [Google Scholar] [CrossRef]
- Valsera-Naranjo, E.; Sumper, A.; Villafafila-Robles, R.; Martínez-Vicente, D. Probabilistic Method to Assess the Impact of Charging of Electric Vehicles on Distribution Grids. Energies 2012, 5, 1503–1531. [Google Scholar] [CrossRef]
- Huang, S.; Infield, D. The potential of domestic electric vehicles to contribute to Power System Operation through vehicle to grid technology. In Proceedings of the 2009 44th International Universities Power Engineering Conference (UPEC), Glasgow, UK, 1–4 September 2009; pp. 1–5. [Google Scholar]
- Kelly, J.C.; MacDonald, J.S.; Keoleian, G.A. Time-dependent plug-in hybrid electric vehicle charging based on national driving patterns and demographics. Appl. Energy 2012, 94, 395–405. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Q.; Hong, T.; Kang, C. Review of Smart Meter Data Analytics: Applications, Methodologies, and Challenges. IEEE Trans. Smart Grid 2019, 10, 3125–3148. [Google Scholar] [CrossRef]
- Open Data Inception. Library Catalog. Available online: data.opendatasoft.com (accessed on 17 March 2021).
- Salmon, M. riem: Accesses Weather Data from the Iowa Environment Mesonet, 2016. Library Catalog. Available online: cran.r-project.org (accessed on 13 April 2020).
- National Oceanic and Atmospheric Administration (NOAA). Data Access|National Centers for Environmental Information (NCEI) Formerly Known as National Climatic Data Center (NCDC). Library Catalog. Available online: www.ncdc.noaa.gov/data-access (accessed on 17 March 2021).
- International Energy Agency. Electric Car Market Shares in Electric Vehicle Initiative Countries, 2019. Library Catalog. Available online: www.iea.org (accessed on 17 March 2021).
- Electric Vehicle Market Statistics 2020—How Many Electric Cars in UK? Available online: www.nextgreencar.com/electric-cars/statistics/ (accessed on 17 March 2021).
- NOBIL. NOBIL Database. Library Catalog. Available online: info.nobil.no/eng (accessed on 17 March 2021).
- DataNorge. Traffic Volumes. Library Catalog. Available online: data.norge.no (accessed on 17 March 2021).
- StatisticsNorway. Road Traffic Volumes, by Main Type of Vehicle, Type of Fuel and Age of Vehicle 2005–2019. Library Catalog. Available online: www.ssb.no (accessed on 17 March 2021).
- StatisticsNorway. Registered Vehicles. Library Catalog. Available online: www.ssb.no (accessed on 17 March 2021).
- Reykjavík. Reykjavík Transport. Library Catalog. Available online: opingogn.is (accessed on 17 March 2021).
- StatisticsIceland. Registered Motor Vehicles. Library Catalog. Available online: www.statice.is (accessed on 17 March 2021).
- ElbilSverige. Charging Point Locations in Nordic Countries. Library Catalog. Available online: www.elbilsverige.se (accessed on 17 March 2021).
- StatisticsSweden. Registered Vehicles. Library Catalog. Available online: www.statistikdatabasen.scb.se (accessed on 17 March 2021).
- RotterdamOpenData. Charging Point Locations and Usage in Rotterdam. Library Catalog. Available online: rotterdamopendata.nl (accessed on 17 March 2021).
- EindhovenOpenData. Charging Point Locations in Eindhoven. Library Catalog. Available online: data.eindhoven.nl (accessed on 17 March 2021).
- Elaad NL. Data Analytics. Library Catalog. Available online: www.elaad.nl/research/data-analytics/ (accessed on 17 March 2021).
- CBS. Centraal Bureau Voor De Statistiek: Motor vehicles; type, age class. Available online: opendata.cbs.nl/statline/ (accessed on 17 March 2021).
- CBS. Centraal Bureau Voor De Statistiek: Onderzoek Onderweg in Nederland—ODiN 2018, 2019. Library Catalog. Available online: easy.dans.knaw.nl (accessed on 17 March 2021).
- CBS. Centraal Bureau Voor De Statistiek: Mobility by Person, Transport Mode and Region. Library Catalog. Available online: opendata.cbs.nl/statline/ (accessed on 17 March 2021).
- StatisticsFinland. Average Commuting Distance by Year. Library Catalog. Available online: pxnet2.stat.fi (accessed on 17 March 2021).
- StatisticsFinland. Number of Vehicles Registered by Year, Vehicle Class and Information. Library Catalog. Available online: Pxnet2.stat.fi (accessed on 17 March 2021).
- Data Gov Hong-Kong. Statistics on Passenger, Visitor and Vehicular Traffic. Library Catalog. Available online: data.gov.hk (accessed on 17 March 2021).
- StatsGov. China Statistical Yearbook 2018. Library Catalog. Available online: www.stats.gov.cn/tjsj/ndsj/2018/indexeh.htm (accessed on 17 March 2021).
- Data Gov Hong-Kong. Details of HK Electric EV Charging Stations. Library Catalog. Available online: data.gov.hk (accessed on 17 March 2021).
- Data Gov Hong-Kong. Traffic Surveys in Kowloon East. Library Catalog. Available online: data.gov.hk (accessed on 17 March 2021).
- DadosGOV. Charging Stations E-mobility in Lisbon. Library Catalog. Available online: dados.gov.pt (accessed on 17 March 2021).
- PORDATA. Traffic Satistics in Portugal. Library Catalog. Available online: www.pordata.pt (accessed on 17 March 2021).
- US Department of Energy. Alternative Fuels Data Center. Library Catalog. Available online: afdc.energy.gov/datadownload (accessed on 17 March 2021).
- Makram, L. Electric Vehicle Charging Stations: Energy Consumption & Savings. Library Catalog. Available online: open-data.bouldercolorado.gov (accessed on 17 March 2021).
- City of Palo Alto. Electric Vehicle Charging Station Usage (July 2011–December 2017) · Open Data. Library Catalog. Available online: data.cityofpaloalto.org (accessed on 17 March 2021).
- City of Evanston. City-Owned Electric Vehicle Charging Station Usage January 2016 to August 2017|Open Data. Library Catalog. Available online: data.cityofevanston.org (accessed on 17 March 2021).
- ACN-Data—A Public EV Charging Dataset. Library Catalog. Available online: ev.caltech.edu/dataset (accessed on 17 March 2021).
- City of Houston. Traffic Counts in the City of Houston. Library Catalog. Available online: cohgis-mycity.opendata.arcgis.com (accessed on 17 March 2021).
- Skerpan, B. Resident Mobility Survey. Library Catalog. Available online: open-data.bouldercolorado.gov (accessed on 17 March 2021).
- New York State. Electric Vehicles per County|Open Data NY. Library Catalog. Available online: data.ny.gov (accessed on 17 March 2021).
- City of Edmonton. Public Charging Stations for Electric Vehicles. Library Catalog. Available online: data.edmonton.ca (accessed on 17 March 2021).
- OpenGovOntario. Electric Vehicle Home Charging Program Applicant Data. Library Catalog. Available online: data.ontario.ca (accessed on 17 March 2021).
- TrafficDataProgram. Annual Traffic Volumes 2004–2010 in British Columbia. Library Catalog. Available online: catalogue.data.gov.bc.ca (accessed on 17 March 2021).
- CanadaGov. Canadian Travel Survey, Travel in Canada, by Travel Duration. Library Catalog. Available online: open.canada.ca (accessed on 17 March 2021).
- Milot, G. Electric and Hybrid Vehicles–CKAN. Library Catalog. Available online: donnees.ville.montreal.qc.ca (accessed on 17 March 2021).
- IRVE. Charging Point Locations for Electric Vehicles. Library Catalog. Available online: opendata.reseaux-energies.fr (accessed on 17 March 2021).
- DataGouv. Charging Sessions April–May 2017 in Paris. Library Catalog. Available online: www.data.gouv.fr (accessed on 17 March 2021).
- SAPLabs. Electric Vehicle Charging Transactions of SAP Labs France Company Fleet. Available online: https://search.sap.com (accessed on 17 March 2021).
- ParisData. Belib’ Availability in Real-Time. Library Catalog. Available online: opendata.paris.fr (accessed on 17 March 2021).
- ParisData. Historical Traffic Counts in Paris. Library Catalog. Available online: opendata.paris.fr (accessed on 17 March 2021).
- RennesMétropole. Real-Time Traffic in Rennes. Library Catalog. Available online: data.rennesmetropole.fr (accessed on 17 March 2021).
- INSEE. Travel Survey 2015: Home to Work. Library Catalog. Available online: data.grandparissud.fr (accessed on 17 March 2021).
- INSEE. Registered Vehicles in France from 1990 to 2018. Library Catalog. Available online: www.insee.fr (accessed on 17 March 2021).
- New Plymouth District Council. Traffic Counts in New Plymouth. Library Catalog. Available online: www.newplymouthnz.com (accessed on 17 March 2021).
- StatsNZ. Motor Vehicles Registered. Library Catalog. Available online: archive.stats.govt.nz (accessed on 17 March 2021).
- Office for Low Emission Vehicles. National Charge Point Registry. Library Catalog. 2012. Available online: data.gov.uk (accessed on 17 March 2021).
- Sunderland City Council. Charge Your Car. Library Catalog. Available online: www.sunderland.gov.uk/chargeyourcar (accessed on 17 March 2021).
- TransportTeam. Electric Vehicle Charging Sessions Dundee. Library Catalog. Available online: data.dundeecity.gov.uk (accessed on 17 March 2021).
- Open Data Team. Electric Vehicle Charging Station Usage in Perth and Kinross. Library Catalog. Available online: data.pkc.gov.uk (accessed on 17 March 2021).
- Radford, A. Birmingham and West Midlands Real-Time Traffic Data. Library Catalog. Available online: data.birmingham.gov.uk (accessed on 17 March 2021).
- Department for Transport. Traffic Flows, Borough. Library Catalog. Available online: data.london.gov.uk (accessed on 17 March 2021).
- UKDataService. National Travel Survey 2002–2017. Library Catalog. Available online: www.ukdataservice.ac.uk (accessed on 17 March 2021).
- Smith, O. How Many Left? Library Catalog. Available online: www.howmanyleft.co.uk (accessed on 17 March 2021).
- Offenes Daten Portal. Charging Point Locations in Moers. Library Catalog. Available online: www.offenesdatenportal.de (accessed on 17 March 2021).
- Open Data Bonn. Charging Point Locations and Usage in Real-Time in Bonn. Library Catalog. Available online: opendata.bonn.de (accessed on 17 March 2021).
- Open Data Bonn. Real-Time Traffic in Bonn. Library Catalog. Available online: opendata.bonn.de (accessed on 17 March 2021).
- Open Data Bayern. Traffic Volumes in Bayern. Library Catalog. Available online: opendata.bayern.de (accessed on 17 March 2021).
- FDZ Ruhr am RWI, Research Data Center. Library Catalog. Available online: www.rwi-essen.de (accessed on 17 March 2021).
- Ecke, L. German Mobility Panel—Startseite. Library Catalog. 2020. Available online: mobilitaetspanel.ifv.kit.edu/english/index.php (accessed on 17 March 2021).
- Bochum. Registered Vehicles in Bochum. Library Catalog. Available online: www.bochum.de (accessed on 17 March 2021).
- MLIT. Travel Survey in Japan from April 2019. Library Catalog. Available online: www.mlit.go.jp (accessed on 17 March 2021).
- e Stat. Registered Vehicles in Japan. Library Catalog. Available online: www.e-stat.go.jp (accessed on 17 March 2021).
- Passenger Car Sales by Country, around the World. Library Catalog. Available online: www.theglobaleconomy.com (accessed on 17 March 2021).
- Nationale Databank Wegverkeersgegevens. Real-Time and Historical Traffic in the Netherlands. Library Catalog. Available online: opendata.ndw.nu (accessed on 17 March 2021).
- Lee, Z.J.; Li, T.; Low, S.H. ACN-Data: Analysis and Applications of an Open EV Charging Dataset. In Proceedings of the Tenth ACM International Conference on Future Energy Systems, Phoenix, AZ, USA, 25–28 June 2019; pp. 139–149. [Google Scholar] [CrossRef]
- Cerema. Road Traffic Open Data. Library Catalog. 2020. Available online: trafic-routier.data.cerema.fr (accessed on 17 March 2021).
- Department for Transport. Domestics Chargepoint Analysis 2017. Library Catalog. 2018. Available online: data.gov.uk (accessed on 17 March 2021).
- Department for Transport. Rapid Chargepoint Analysis 2017. Library Catalog. 2018. Available online: www.gov.uk (accessed on 17 March 2021).
- Department for Transport. Fast Chargepoint Analysis 2017. Library Catalog. 2018. Available online: www.gov.uk (accessed on 17 March 2021).
- LondonDatastore. Low Carbon London Electric Vehicle Load Profiles. Library Catalog. Available online: data.london.gov.uk (accessed on 17 March 2021).
- Elbilsstatistik. Laddinfrastatistik. Library Catalog. Available online: www.elbilsstatistik.se (accessed on 17 March 2021).
- Tampere. Tampere Real-Time Traffic. Library Catalog. Available online: data.tampere.fi (accessed on 17 March 2021).
- Breidenbach, P.; Eilers, L. RWI-GEO-GRID: Socio-economic data on grid level. Publisher: De Gruyter Oldenbourg Section: Jahrbücher für Nationalökonomie und Statistik. Jahrbücher Natl. Stat. 2018, 238, 609–616. [Google Scholar] [CrossRef]
- Yuanyuan, L. China Installed More than 1000 EV Charging Stations per day in 2019. Library Catalog. 2020. Available online: www.renewableenergyworld.com (accessed on 17 March 2021).
- Helmus, J.R.; Lees, M.H.; van den Hoed, R. A data driven typology of electric vehicle user types and charging sessions. Transp. Res. Part C Emerg. Technol. 2020, 115, 102637. [Google Scholar] [CrossRef]
- Lahariya, M.; Benoit, D.; Develder, C. Poster: Defining a synthetic data generator for realistic electric vehicle charging sessions. In Proceedings of the Eleventh ACM International Conference on Future Energy Systems, Melbourne, Australia, 22–26 June 2020; p. 2. [Google Scholar] [CrossRef]
- Liang, M.; Li, W.; Yu, J.; Shi, L. Kernel-based electric vehicle charging load modeling with improved latin hypercube sampling. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Chen, L.; Huang, X.; Zhang, H. Modeling the Charging Behaviors for Electric Vehicles Based on Ternary Symmetric Kernel Density Estimation. Energies 2020, 13, 1551. [Google Scholar] [CrossRef]
- Khaki, B.; Chung, Y.W.; Chu, C.; Gadh, R. Nonparametric User Behavior Prediction for Distributed EV Charging Scheduling. In Proceedings of the 2018 IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Khaki, B.; Chung, Y.W.; Chu, C.; Gadh, R. Probabilistic Electric Vehicle Load Management in Distribution Grids. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Chung, Y.W.; Khaki, B.; Chu, C.; Gadh, R. Electric Vehicle User Behavior Prediction Using Hybrid Kernel Density Estimator. In Proceedings of the 2018 IEEE International Conference on Probabilistic Methods Applied to Power Systems (PMAPS), Boise, ID, USA, 23–28 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Sokorai, P.; Fleischhacker, A.; Lettner, G.; Auer, H. Stochastic Modeling of the Charging Behavior of Electromobility. World Electr. Veh. J. 2018, 9, 44. [Google Scholar] [CrossRef]
- Amini, M.H.; Kargarian, A.; Karabasoglu, O. ARIMA-based decoupled time series forecasting of electric vehicle charging demand for stochastic power system operation. Electr. Power Syst. Res. 2016, 140, 378–390. [Google Scholar] [CrossRef]
- Bae, S.; Kwasinski, A. Spatial and Temporal Model of Electric Vehicle Charging Demand. IEEE Trans. Smart Grid 2012, 3, 394–403. [Google Scholar] [CrossRef]
- Häggström, O. Finite Markov Chains and Algorithmic Applications (London Mathematical Society Student Texts); Cambridge University Press: Cambridge, UK, 2002. [Google Scholar] [CrossRef]
- Box, G.E.P.; Jenkins, G.M.; Reinsel, G.C.; Ljung, G.M. Time Series Analysis: Forecasting and Control, 5th ed.; Wiley Series in Probability and Statistics; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2016. [Google Scholar]
- Baskett, F.; Chandy, K.M.; Muntz, R.R.; Palacios, F.G. Open, Closed, and Mixed Networks of Queues with Different Classes of Customers. J. ACM 1975, 22, 248–260. [Google Scholar] [CrossRef]
- The EV Project—Overview. Library Catalog. 2010. Available online: web.archive.org/web/20101128153912/http://theevproject.com/overview.php (accessed on 17 March 2021).
- Majidpour, M.; Qiu, C.; Chu, P.; Gadh, R.; Pota, H.R. A novel forecasting algorithm for electric vehicle charging stations. In Proceedings of the 2014 International Conference on Connected Vehicles and Expo (ICCVE), Vienna, Austria, 3–7 November 2014; pp. 1035–1040. [Google Scholar] [CrossRef]
- Xiong, Y.; Chu, C.C.; Gadh, R.; Wang, B. Distributed optimal vehicle grid integration strategy with user behavior prediction. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Frendo, O.; Gaertner, N.; Stuckenschmidt, H. Improving Smart Charging Prioritization by Predicting Electric Vehicle Departure Time. IEEE Trans. Intell. Transp. Syst. 2020, 1–8. [Google Scholar] [CrossRef]
- Mies, J.; Helmus, J.; van den Hoed, R. Estimating the Charging Profile of Individual Charge Sessions of Electric Vehicles in The Netherlands. World Electr. Veh. J. 2018, 9, 17. [Google Scholar] [CrossRef]
- Lu, Y.; Li, Y.; Xie, D.; Wei, E.; Bao, X.; Chen, H.; Zhong, X. The Application of Improved Random Forest Algorithm on the Prediction of Electric Vehicle Charging Load. Energies 2018, 11, 3207. [Google Scholar] [CrossRef]
- Zhu, J.; Yang, Z.; Mourshed, M.; Guo, Y.; Zhou, Y.; Chang, Y.; Wei, Y.; Feng, S. Electric Vehicle Charging Load Forecasting: A Comparative Study of Deep Learning Approaches. Energies 2019, 12, 2692. [Google Scholar] [CrossRef]
- Vapnik, V.N. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995. [Google Scholar] [CrossRef]
- Breiman, L. Random Forest. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Buzna, L.; Falco, P.D.; Khormali, S.; Proto, D.; Straka, M. Electric vehicle load forecasting: A comparison between time series and machine learning approaches. In Proceedings of the International Conference on Energy Transition in the Mediterranean Area, Cagliari, Italy, 28–30 May 2019; p. 5. [Google Scholar]
- Rosenblatt, F. The perceptron: A probabilistic model for information storage and organization in the brain. Psychol. Rev. 1958, 65, 386–408. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning Internal Representations by Error Propagation; Technical Report ICS-8506; Institute for Cognitive Science: San Diego, CA, USA, 1985. [Google Scholar]
- LeCun, Y.; Boser, B.; Denker, J.S.; Henderson, D.; Howard, R.E.; Hubbard, W.; Jackel, L.D. Backpropagation Applied to Handwritten Zip Code Recognition. Neural Comput. 1989, 1, 541–551. [Google Scholar] [CrossRef]
- Chakraborty, S.; Tomsett, R.; Raghavendra, R.; Harborne, D.; Alzantot, M.; Cerutti, F.; Srivastava, M.; Preece, A.; Julier, S.; Rao, R.M.; et al. Interpretability of deep learning models: A survey of results. In Proceedings of the 2017 IEEE SmartWorld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computed, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), San Francisco, CA, USA, 4–8 August 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhu, S.C. Visual Interpretability for Deep Learning: A Survey. arXiv 2018, arXiv:1802.00614. [Google Scholar] [CrossRef]
- Vynakov, O.F.; Savolova, E.V.; Skrynnyk, A.I. Modern Electric Cars of Tesla Motors Company. Autom. Technol. Bus. Process. 2016, 8, 9–18. [Google Scholar] [CrossRef]
- Wood, S. mgcv: Mixed GAM Computation Vehicle with Automatic Smoothness Estimation. Library Catalog. 2019. Available online: CRAN.R-project.org/package=mgcv (accessed on 30 June 2020).
- Burchart-Korol, D.; Jursova, S.; Folęga, P.; Korol, J.; Pustejovska, P.; Blaut, A. Environmental life cycle assessment of electric vehicles in Poland and the Czech Republic. J. Clean. Prod. 2018, 202, 476–487. [Google Scholar] [CrossRef]
- General Data Protection Regulation (GDPR)–Official Legal Text. Library Catalog. Available online: gdpr-info.eu (accessed on 17 March 2021).
- eCO2mix. Electrical Consumption in Cities Open Data. Library Catalog. Available online: www.data.gouv.fr (accessed on 17 March 2021).
- Zhang, P.; Zhou, C.; Stewart, B.G.; Hepburn, D.M.; Zhou, W.; Yu, J. An Improved Non-Intrusive Load Monitoring Method for Recognition of Electric Vehicle Battery Charging Load. Energy Procedia 2011, 12, 104–112. [Google Scholar] [CrossRef]
- Wang, S.; Du, L.; Ye, J.; Zhao, D. A Deep Generative Model for Non-intrusive Identification of EV Charging Profiles. IEEE Trans. Smart Grid 2020, 11, 4916–4927. [Google Scholar] [CrossRef]
- Du, N.; Dai, H.; Trivedi, R.; Upadhyay, U.; Gomez-Rodriguez, M.; Song, L. Recurrent Marked Temporal Point Processes: Embedding Event History to Vector. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining–KDD ’16, San Francisco, CA, USA, 13–17 August 2016; pp. 1555–1564. [Google Scholar] [CrossRef]
- Xiao, S.; Yan, J.; Yang, X.; Zha, H.; Chu, S.M. Modeling the Intensity Function of Point Process via Recurrent Neural Networks. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017; p. 7. [Google Scholar]
- Fallah, N.; Gu, H.; Mohammad, K.; Seyyedsalehi, S.A.; Nourijelyani, K.; Eshraghian, M.R. Nonlinear Poisson regression using neural networks: A simulation study. Neural Comput. Appl. 2009, 18, 939–943. [Google Scholar] [CrossRef]
- Capezza, C.; Palumbo, B.; Goude, Y.; Wood, S.N.; Fasiolo, M. Additive stacking for disaggregate electricity demand forecasting. arXiv 2020, arXiv:2005.10092. [Google Scholar]
- Sadeghianpourhamami, N.; Deleu, J.; Develder, C. Achieving Scalable Model-Free Demand Response in Charging an Electric Vehicle Fleet with Reinforcement Learning. In Proceedings of the Ninth International Conference on Future Energy Systems—e-Energy ’18, Karlsruhe, Germany, 12–15 June 2018; pp. 411–413. [Google Scholar] [CrossRef]
- Enedis. Grid Map Open Data. Library Catalog. Available online: data.enedis.fr (accessed on 17 March 2021).
- Makonin, S.; Popowich, F. Nonintrusive load monitoring (NILM) performance evaluation. Energy Effic. 2015, 8, 809–814. [Google Scholar] [CrossRef]
- Salem, H.; Sayed-Mouchaweh, M. A Semi-supervised and Online Learning Approach for Non-Intrusive Load Monitoring. In Machine Learning and Knowledge Discovery in Databases; Lecture Notes in Computer Science; Brefeld, U., Fromont, E., Hotho, A., Knobbe, A., Maathuis, M., Robardet, C., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 585–601. [Google Scholar] [CrossRef]
- Pecan Street Data. Library Catalog. Available online: www.pecanstreet.org (accessed on 17 March 2021).
- Laub, P.J.; Taimre, T.; Pollett, P.K. Hawkes Processes. arXiv 2015, arXiv:1507.02822. [Google Scholar]
- Frendo, O.; Graf, J.; Gaertner, N.; Stuckenschmidt, H. Data-driven smart charging for heterogeneous electric vehicle fleets. Energy AI 2020, 1, 100007. [Google Scholar] [CrossRef]
- Department of Transport. Creating a Market: Victorian Electric Vehicle Trial Mid-Term Report; Technical Report; State Government of Victoria: Melbourne, VIC, Australia, 2013.
- GOV.UK. National Travel Survey. Library Catalog. Available online: www.gov.uk (accessed on 23 November 2020).
- UCDavis. Plug-In Hybrid & Electric Vehicles Research Center. Library Catalog. Available online: phev.ucdavis.edu (accessed on 23 November 2020).
- Tesla Motors, Electric Cars, Solar & Clean Energy. Available online: https://www.tesla.com/ (accessed on 17 March 2021).
- PJM. Markets & Operations, District of Columbia. Library Catalog. Available online: www.pjm.com/markets-and-operations (accessed on 23 November 2020).
- Dominguez-Garcia, A.D.; Heydt, G.T.; Suryanarayanan, S. Implications of the Smart Grid Initiative on Distribution Engineering; Technical Report; Power Systems Engineering Research Center: Tempe, AZ, USA, 2011. [Google Scholar]
- NewYorkState. Traffic Data Viewer. Library Catalog. Available online: www.dot.ny.gov/tdv (accessed on 23 November 2020).
- Huber, J.; Höffer, J.; Thumm, J.; Weinhardt, C. Parking Events Derived from Trip Data from MiD2008. Library Catalog. 2019. Available online: publikationen.bibliothek.kit.edu/1000098024 (accessed on 23 November 2020).
- Ministerie van Verkeer en Waterstaat, Rijkswaterstaat, Dienst Verkeer en Scheepvaart, Mobiliteitsonderzoek Nederland 2008. Library Catalog. 2008. Available online: easy.dans.knaw.nl (accessed on 23 November 2020).
- Engineering Products and Training Courses|EA Technology. Library Catalog. Available online: eatechnology.com (accessed on 23 November 2020).
- Leung, K.; Massey, W.; Whitt, W. Traffic models for wireless communication networks. IEEE J. Sel. Areas Commun. 1994, 12, 1353–1364. [Google Scholar] [CrossRef]




| Countries | EVSE Data | Exogenous Data | ||||
|---|---|---|---|---|---|---|
| Location | Charging Sessions | Traffic Counts | Travel Survey | Registered Vehicles | ||
| Historical | Real-Time | |||||
| Norway | [59] | [59] | [60,61] | [62] | ||
| Iceland | [63] | [64] | ||||
| Sweden | [65] | [59] | [66] | |||
| Netherlands | [67,68] | [69] | [67] | [70] | [71] | [72] |
| Finland | [59] | [59] | [73] | [74] | ||
| China | [75] | [76,77] | [78] | |||
| Portugal | [79] | [80] | ||||
| USA | [81] | [82,83,84,85] | [86] | [43,87] | [88] | |
| Canada | [89] | [90] | [91] | [92] | [93] | |
| France | [94] | [95,96] | [97] | [98,99] | [100] | [101] |
| New Zealand | [102] | [103] | ||||
| UK | [104,105] | [106,107] | [108,109] | [110] | [111] | |
| Germany | [112] | [113] | [114,115] | [116,117] | [118] | |
| Japan | [119] | [120] | ||||
| Model | Strengths | Weaknesses | Ref |
|---|---|---|---|
| Gaussian | Particularly suited for large simulations | Unrealistic as negative values have a non-zero probability | [14] |
| Weibull, Lognormal, Exponential | Rapid implementation while providing an approximation consistent with reality | Fail to capture significantly diverse behaviours in the data | [13] |
| Mixtures (e.g., Beta, Gaussian) | Captures significantly different users’ behaviours in the data and respects real-world constraints | Unsuitable for medium or large dimension problems with numerous covariates | [24,123,133,134] |
| KDE | Highly versatile model as no explicit prior on the distribution is required | Weak interpretability power in addition to a sensitivity to outliers | [135,136,137,138,139] |
| Model | Strengths | Weaknesses | Ref |
|---|---|---|---|
| Temporal | Adequate for modelling one EVSE or one EV | Generally assumes independence between EVSEs | [15,37,44,140,141] |
| Spatiotemporal | Suited for modelling clusters of charging stations simultaneously | Large increase in complexity with scale | [9,18,32] |
| Queues | Easily scalable with strong theoretical grounds | Restricts reality with simplifying assumptions | [16,29,39,142] |
| Model | Strengths | Weaknesses | Ref |
|---|---|---|---|
| Linear Model | Easily interpretable with fast implementation | Structurally limited for capturing complex and irregular patterns | [148,149,150] |
| Support Vector Machines | Easy implementation and effective in high-dimensional spaces | Not suitable for large and complex datasets which are not linearly separable even in high-dimensional spaces | [8,31,33,147] |
| Random Forest | Versatile model with no prior assumptions on the shape of the data | Weak interpretability with no ability to extrapolate from training data | [12,33,147,151] |
| Neural Networks | Can reach the highest level of performance | Architecture selection process can be laborious with long training time | [28,31,33,41,49,152] |
| Charging Session Dataset | Boulder | Palo Alto | Dundee | Perth | Paris | Domestics UK | |
|---|---|---|---|---|---|---|---|
| First Transaction Date | 1 January 2018 | 29 July 2011 | 9 January 2017 | 9 January 2016 | 1 April 2017 | 1 January 2017 | |
| Last Transaction Date | 31 March 2020 | 31 July 2017 | 5 December 2018 | 8 December 2019 | 30 May 2017 | 31 December 2017 | |
| Total Transactions | All | 18,052 | 133,329 | 47,051 | 63,936 | 4225 | 2,956,198 |
| Weekdays | 13,487 | 101,486 | 34,434 | 46,607 | 4907 | 2,208,695 | |
| Weekends | 4565 | 31,843 | 12,617 | 17,329 | 1555 | 747,503 | |
| Average Transactions | Weekdays | 23 | 65 | 173 | 60 | 101 | 8495 |
| Weekends | 20 | 51 | 160 | 55 | 86 | 7119 | |
| Park Duration (h) | Mean | - | 2.7 | 2.29 | 1.24 | 1.7 | 9.16 |
| Standard Deviation | - | 2.41 | 4.56 | 2.13 | 2.93 | 6.49 | |
| Charge Duration (h) | Mean | 1.81 | 2.05 | - | - | - | - |
| Standard Deviation | 1.34 | 1.39 | - | - | - | - | |
| Energy Demand (kWh) | Mean | 8.42 | 8.18 | 9.16 | 11.01 | 8.51 | 8.88 |
| Standard Deviation | 7.08 | 6.76 | 6.53 | 8.49 | 6.71 | 7.55 | |
| Charging Session Dataset | Specificities | EV Load Models | Models References |
|---|---|---|---|
| Boulder [82] | Public Charging Sessions Medium-sized Dataset GHG and Gasoline Savings 2 years | Spatiotemporal RF Mixtures KDE | [9,18,32] [147,151] [24,123,133,134] [135,136,137,138,139] |
| Palo Alto [83] | Public Charging Sessions Large Dataset Driver’s Post Code 6 years | Spatiotemporal Queues ANN | [9,18,32] [16,39] [28,33,41,49,152] |
| Dundee [106] and Perth [107] | Public Charging Sessions Medium-sized Datasets 2 years (Dundee) and 4 years (Perth) | Temporal SVM Mixtures KDE | [15,37,140,141] [8,33] [24,123,133,134] [135,136,137,138,139] |
| Paris [95] | Public Charging Sessions Small dataset Customer Identifier 2 months | Unimodal distributions LM Queues | [13,14] [148,149,150] [29,142] |
| Domestics UK [125] | Residential charging sessions Large dataset Customer Identifier 1 year | Temporal RF | [44] [12] |
| Section | Keywords | References | |
|---|---|---|---|
| Data | 6.1 Usage and privacy issues | Variables | [55,56] |
| Accessibility | [41] | ||
| Regulations | [164] | ||
| 6.2 Other types of relevant data | General Electrical Load | [53,165] | |
| Non-Intrusive Load Monitoring | [166,167] | ||
| Synthetic data | [134] | ||
| Models | 6.3 Composite Approaches | Stochastic Processes | [168,169] |
| Machine Learning | [170] | ||
| 6.4 Link with optimization | Smart Charging | [6] | |
| Probabilistic Approach | [171] | ||
| Reinforcement Learning | [172] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amara-Ouali, Y.; Goude, Y.; Massart, P.; Poggi, J.-M.; Yan, H. A Review of Electric Vehicle Load Open Data and Models. Energies 2021, 14, 2233. https://doi.org/10.3390/en14082233
Amara-Ouali Y, Goude Y, Massart P, Poggi J-M, Yan H. A Review of Electric Vehicle Load Open Data and Models. Energies. 2021; 14(8):2233. https://doi.org/10.3390/en14082233
Chicago/Turabian StyleAmara-Ouali, Yvenn, Yannig Goude, Pascal Massart, Jean-Michel Poggi, and Hui Yan. 2021. "A Review of Electric Vehicle Load Open Data and Models" Energies 14, no. 8: 2233. https://doi.org/10.3390/en14082233
APA StyleAmara-Ouali, Y., Goude, Y., Massart, P., Poggi, J.-M., & Yan, H. (2021). A Review of Electric Vehicle Load Open Data and Models. Energies, 14(8), 2233. https://doi.org/10.3390/en14082233