3. Data Processing
In this survey, one of the main challenges was to increase the signal-to-noise ratio of the seismic signal for proper wavefield separation, polarization analysis, and the anisotropy study. All these processes rely on first-break picks. In this example, the low quality of data was caused by several factors:
Changes in the near-surface zone between successive sweeps. A core processing step is stacking, which makes it possible to reduce various types of noise and strengthen the useful signal. In this survey, multiple sweeps were performed on each shot point. Due to weather and ground conditions, the near-surface zone changed significantly between sweeps; therefore, we needed to apply a new procedure in the processing sequence before performing vertical stacking.
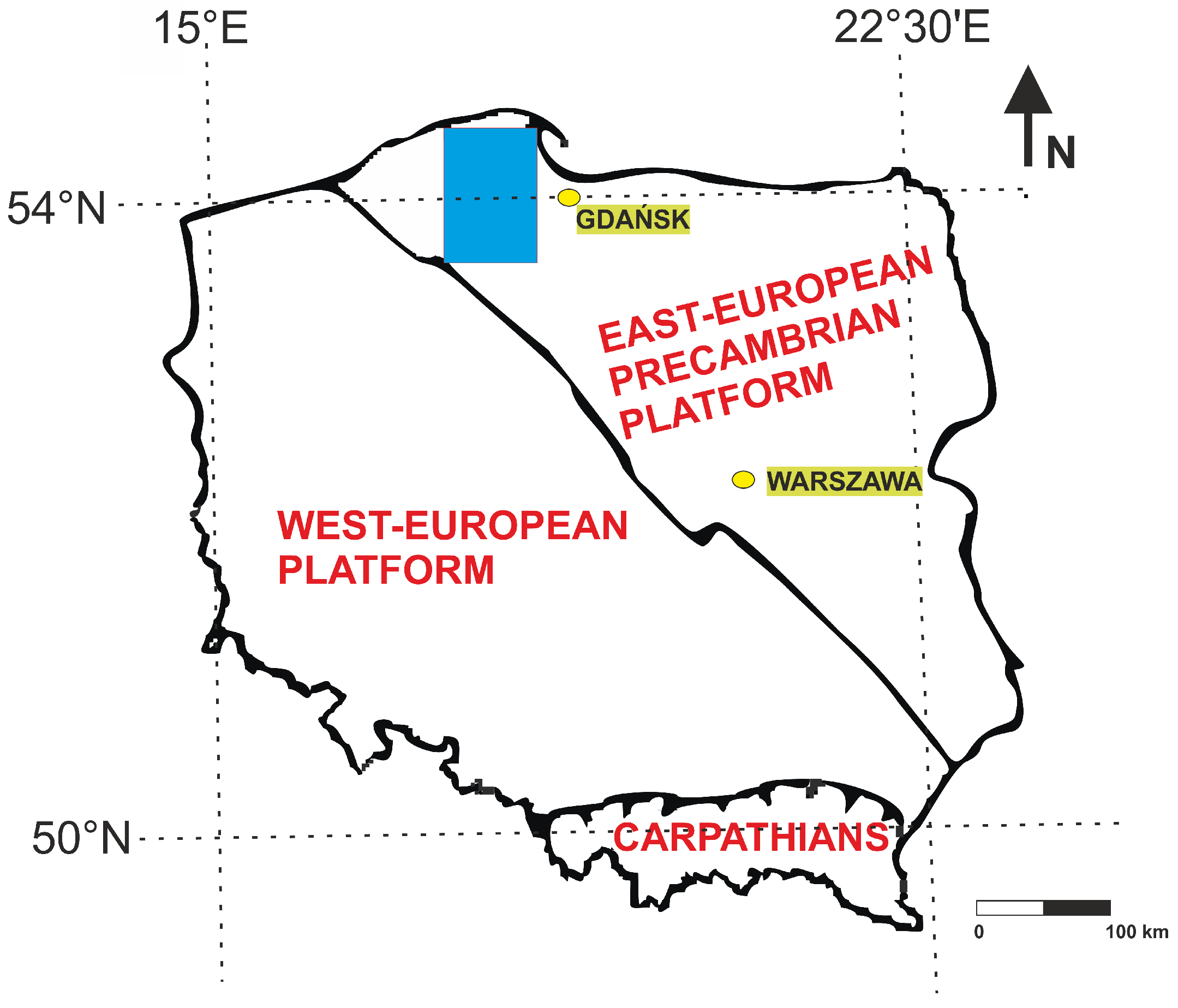
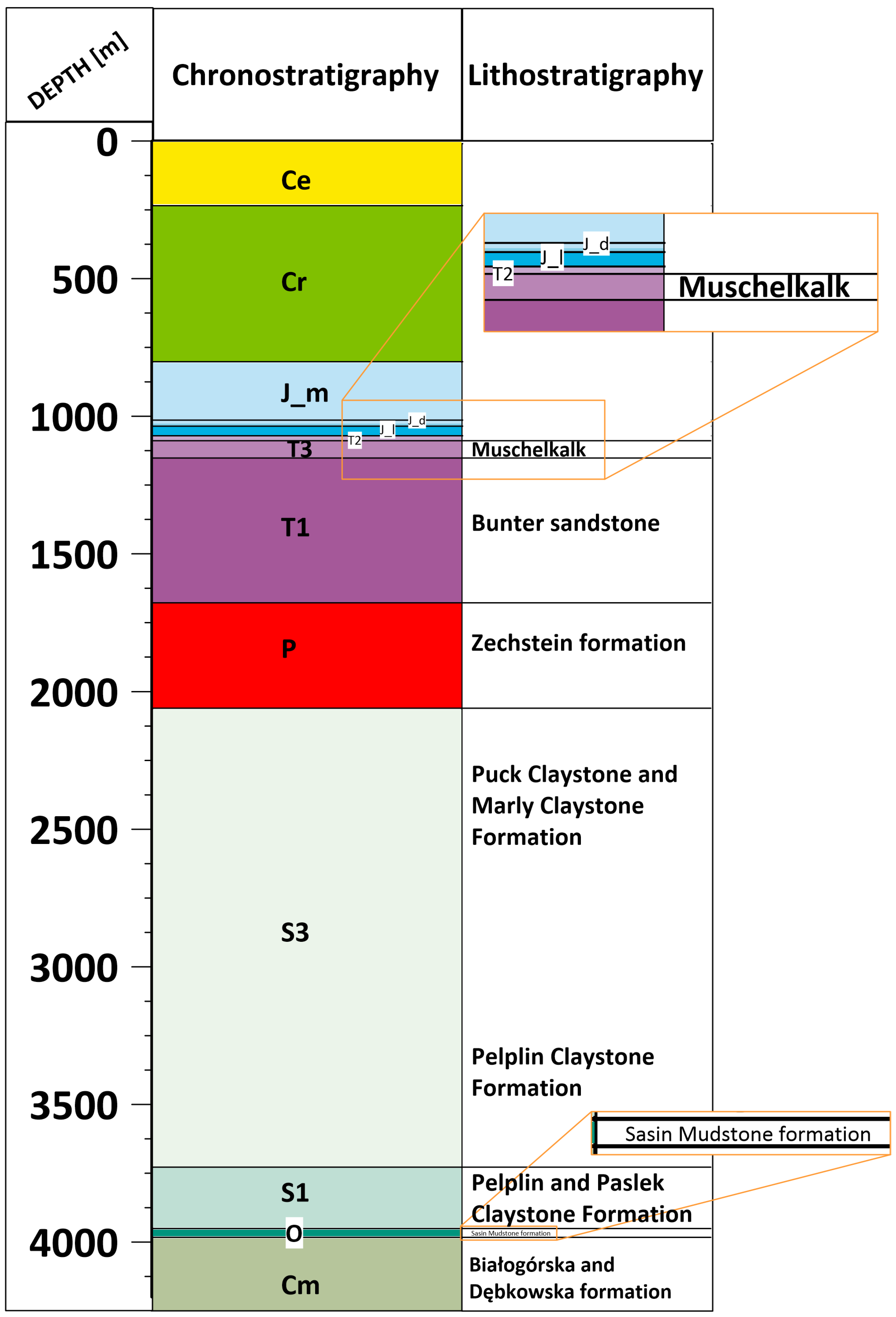
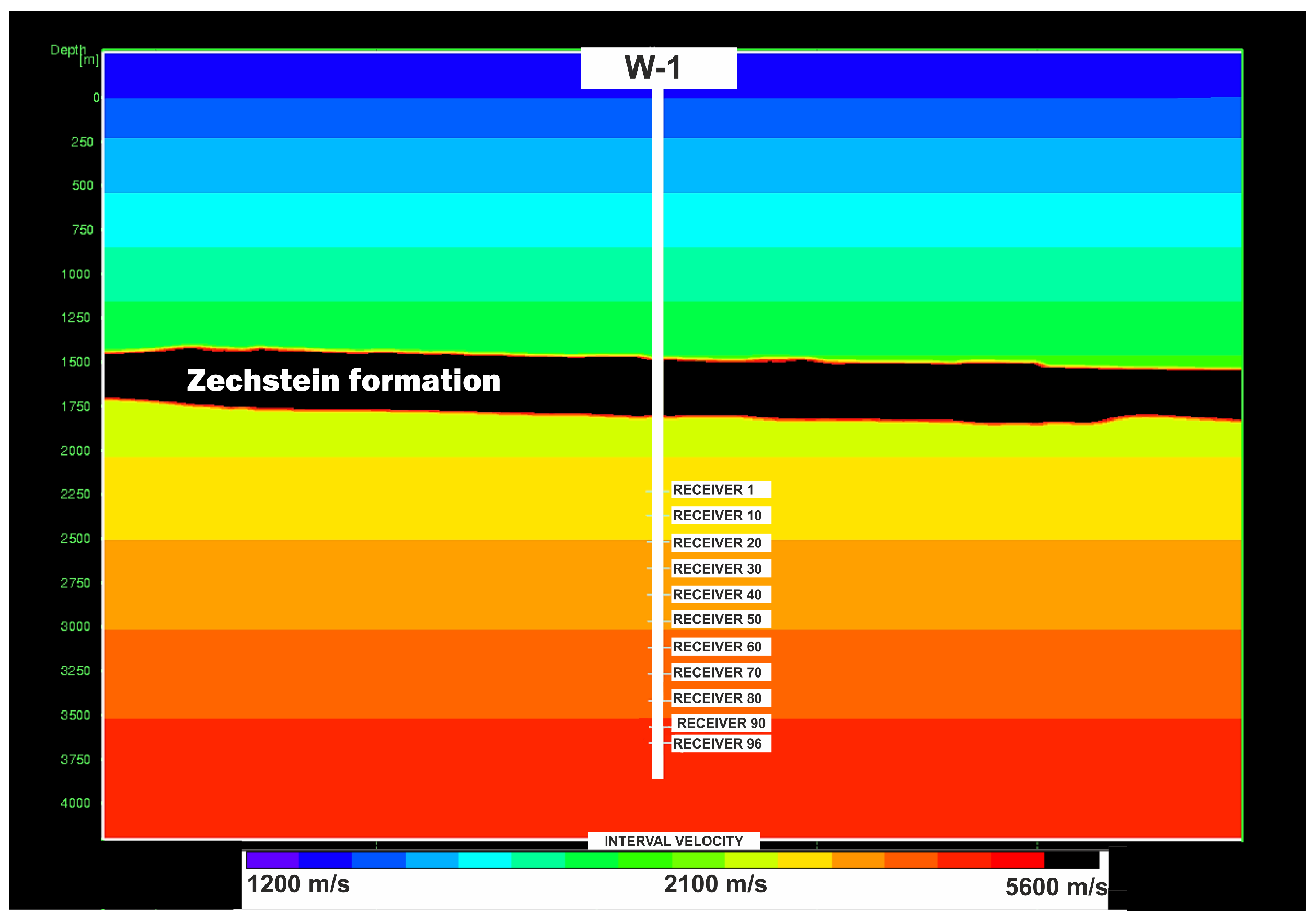
The receivers were located in the depth interval where seismic imaging produces low-quality results due to the properties of the overburden layers. This is a very well-known exploration problem in northern Poland. The Zechstein formation is mostly made of salts, anhydrite, and dolomite. This complex can be described as a shielding screen for seismic signals. This is believed to be the main cause of the failure of hydrocarbon exploration in this region because sub-Zechstein formations cannot be reliably interpreted [
10].
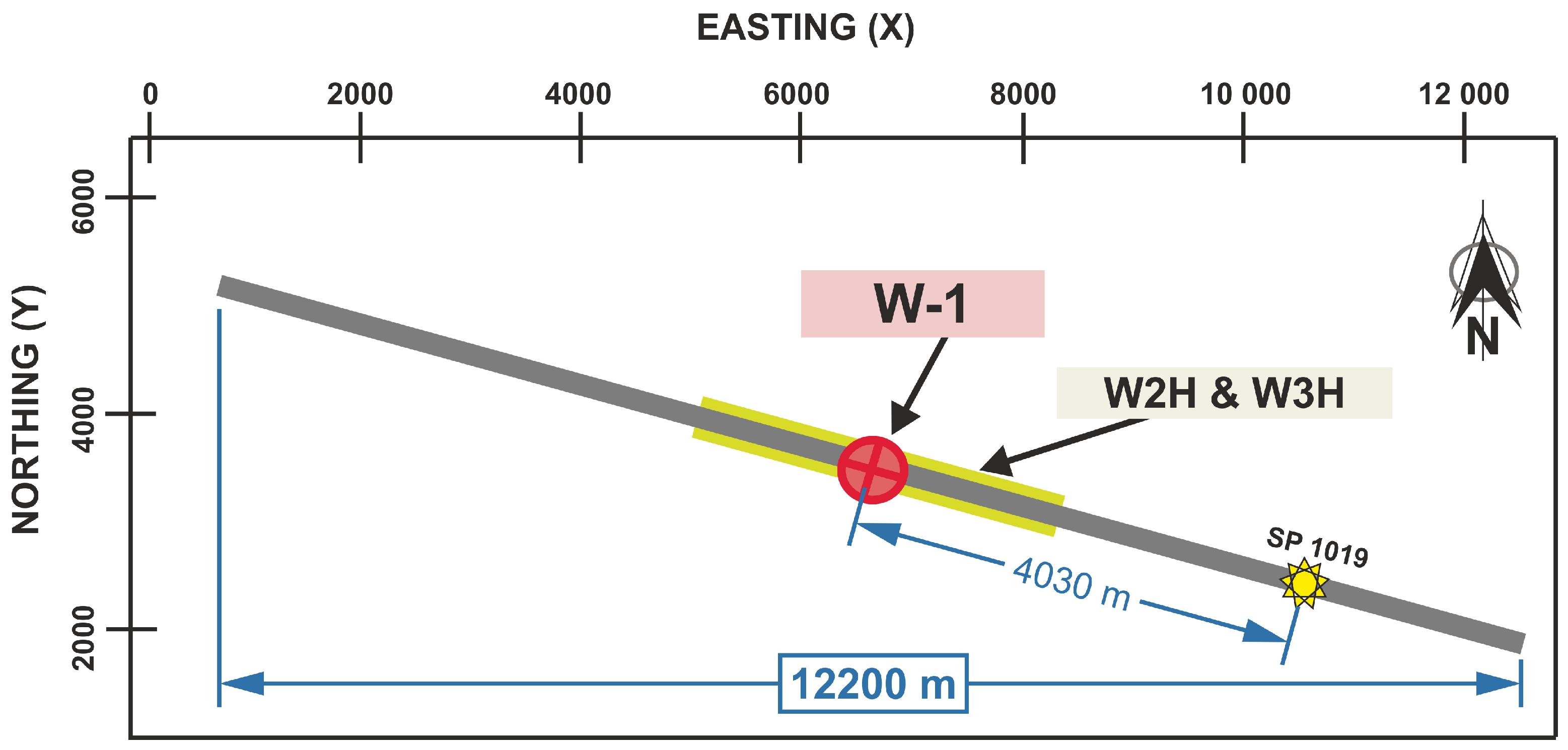
Artifacts related to acquisition. This group includes weak tool anchoring, which can possibly generate various types of noise (hard to classify) due to pressure and the forces present in the well. The device hung on a cable about 3 km long. Note that noise related to the tool’s resonance is often removed by changing its position and moving it up or down. In this case, the tool was in the same place for the whole acquisition period. Furthermore, in many parts of the well there was no casing between the inner and the outer tubes. Ring noise can be generated when a casing is unbounded.
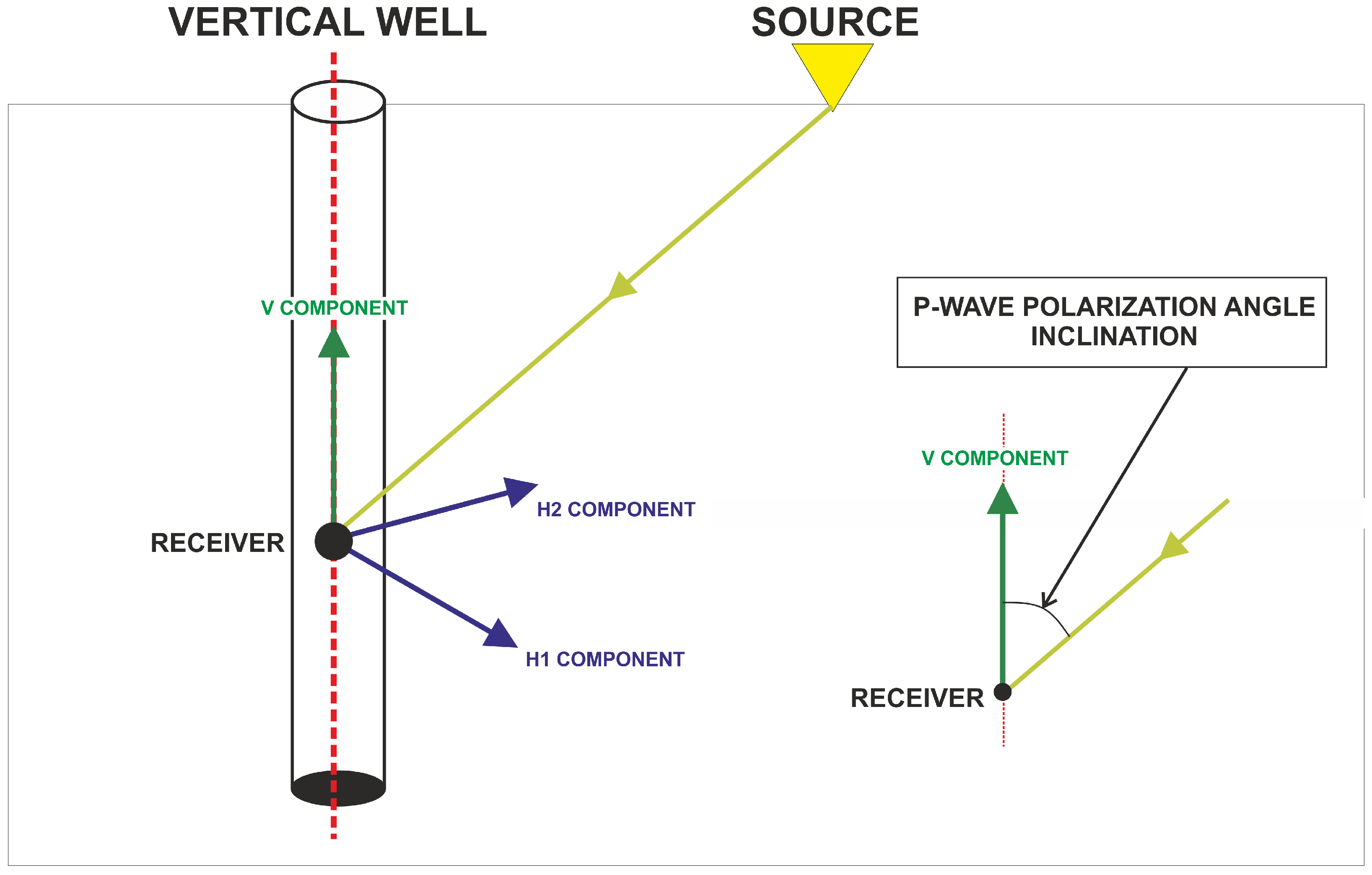
We wanted to examine the best processing workflow for wavefield separation. Typical VSP acquisition consists of 3C receivers that can record two horizontal components (H1 and H2) and one vertical component (V). All components are perpendicular to each other. The correct wavefield separation of the compressional downgoing P-wave on the vertical component and the longitudinal SH and SV waves on the horizontal components is an important seismic processing step. This can be done using the analytical method proposed by Galperin [
11], which is based on the directions of the motion of particles. We tested four processing sequences to determine which one allows the best wavefield separation and, consequently, to accurately determine the polarization angles of the longitudinal wave. This is crucial in the case of P-wave inversion, which needs properly estimated polarization angles [
4]. We tested the following workflows:
Workflow 1 (W1)—component rotation on raw data for each shot; vertical stacking; noise attenuation.
Workflow 2 (W2)—vertical stacking of raw data; component rotation using stacked data; noise attenuation.
Workflow 3 (W3)—noise attenuation before vertical stacking; component rotation on each shot separately; vertical stacking.
Workflow 4 (W4)—noise attenuation; vertical stacking followed by component rotation.
Noise attenuation was always the same and consists of the following procedures:
Single time-invariant, zero-phase Ormsby band-pass filter; frequency range: 16–80 Hz, low-cut: 8 Hz, high-cut ramp: 40 Hz.
Monofrequency noise attenuation (this type of noise was widely present in these data).
Time-space frequency filtering using short-time Fourier transform (STFT) for noise related to tool resonance or surface noise passed via the cable. We used a 200 ms window; the aperture was equal to five traces; threshold value: 3; frequency range: 20–80 Hz.
Vertical and horizontal median filtration for high-energy noise attenuation (a general problem for near-offset shot points). Filter parameters were 100 ms for the vertical window, 30 traces for the horizontal dimension, and 50 ms cosine taper zone; no-scaling factor was used.
Attenuating energy over first breaks using top mute.
Our processing sequence selection criteria were the lowest polarization angle determination error and the most stable distribution along the whole depth interval. The polarization angle is the angle between the axis of the vertical well (parallel to the receiver’s vertical component) and the P-wave incident ray. We will call this the angle inclination; see
Figure 6.
In order to estimate the error of the determination of the polarization angles for each receiver point, the standard deviation of each 5-receiver group was calculated according to Equation (
1):
where
is inclination value for a particular receiver,
is the error for a receiver at depth point
n,
N is a group of 5 receivers, and
is the average value of the inclination angle for this group. Then, the simple arithmetic averages of the standard deviations calculated in the previous step were considered as average errors for each shot point using Equation (
2):
where
is the number of estimated angles and
is less than
.
In this step, we decided to use workflow 4, which produced the lowest error. In general, the stacking procedure strengthens the useful signal and reduces random noise. In workflow 4, we first performed noise attenuation procedures to reduce noise, which is not random, and to avoid its possible subsequent reinforcement in the stacking process. We had to take this additional step due to weather and ground conditions. The surface zone changed between sweeps, and the seismic vibrator trucks sank into the water-logged ground. The elevation changes were significant. The first and the last sweep in each shot point were performed under different geotechnical conditions. Pore space decreased as a result of compaction; as a consequence, the amount of water filling these pores also changed. To make sure that vertical stacking in this situation would in fact help to reduce unwanted interference and strengthen the useful signal, we decided to add a signal-matching procedure before stacking. We know a priori from 3D seismic surface surveys that anisotropy strength is very low. The observed anisotropy is at the limit of detection by seismic methods (
to
). The combination of the great depth and very small values of parameters forced us to obtain the most accurate polarization angles without additional distortions caused by the conditions under which the acquisition was performed. Before we decided to use a time-frequency matching filter, we performed a correlation between records with the calculated reference record (the average of all sweeps on the shot point), see
Figure 7.
At the beginning of the examined depth interval, we can see the lowest correlation for all sweeps. This is an expected effect, as there was no casing between the and the tubes in this part. In the rest of the well, where casing is present, we can see significantly higher correlation, except for the 3200–3400 depth interval, where the correlations are weaker. This is probably due to weak anchorage of receivers in this part of the well; however, this is also a change zone between the Ludlow and upper Silurian complexes.
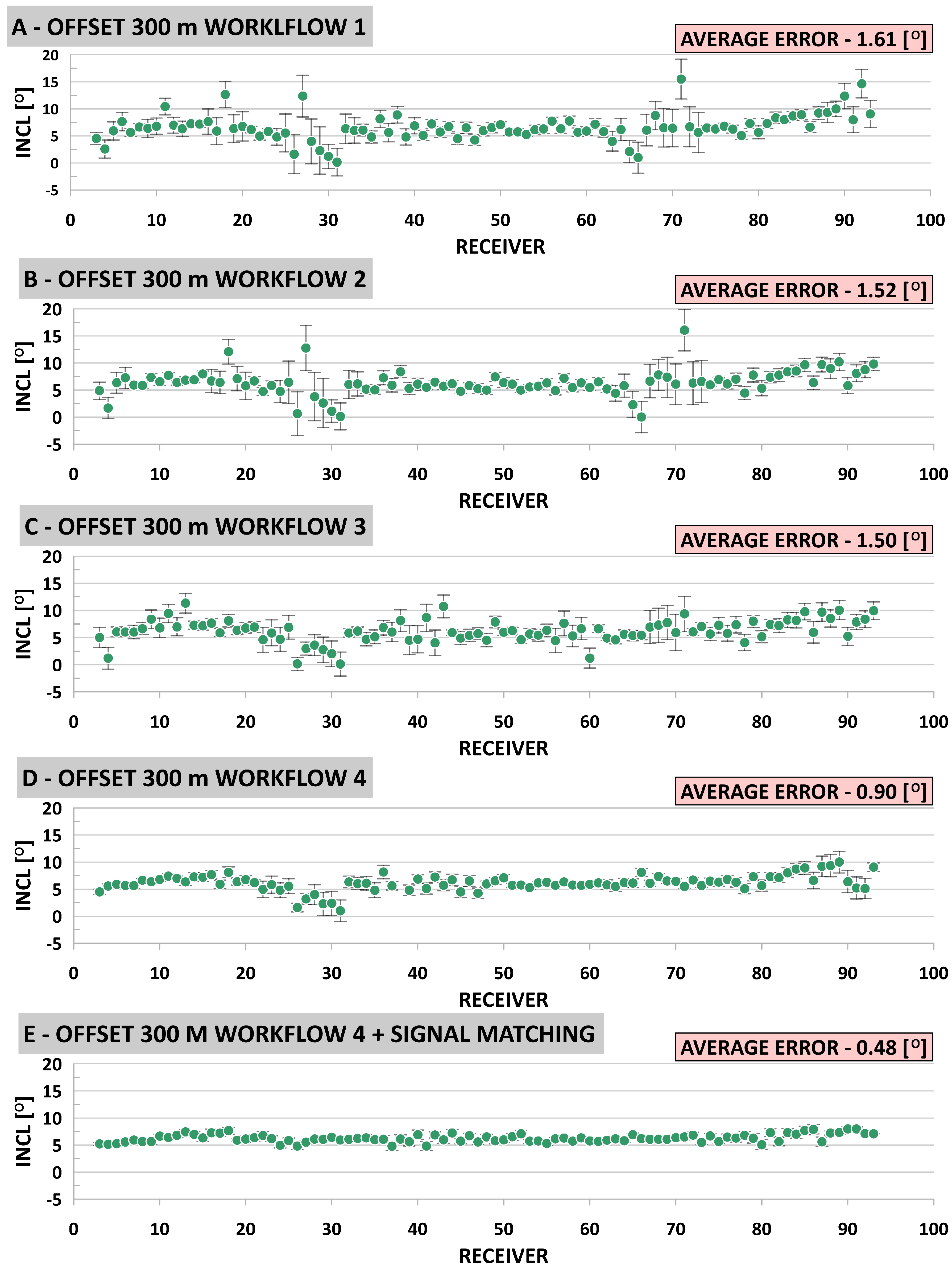
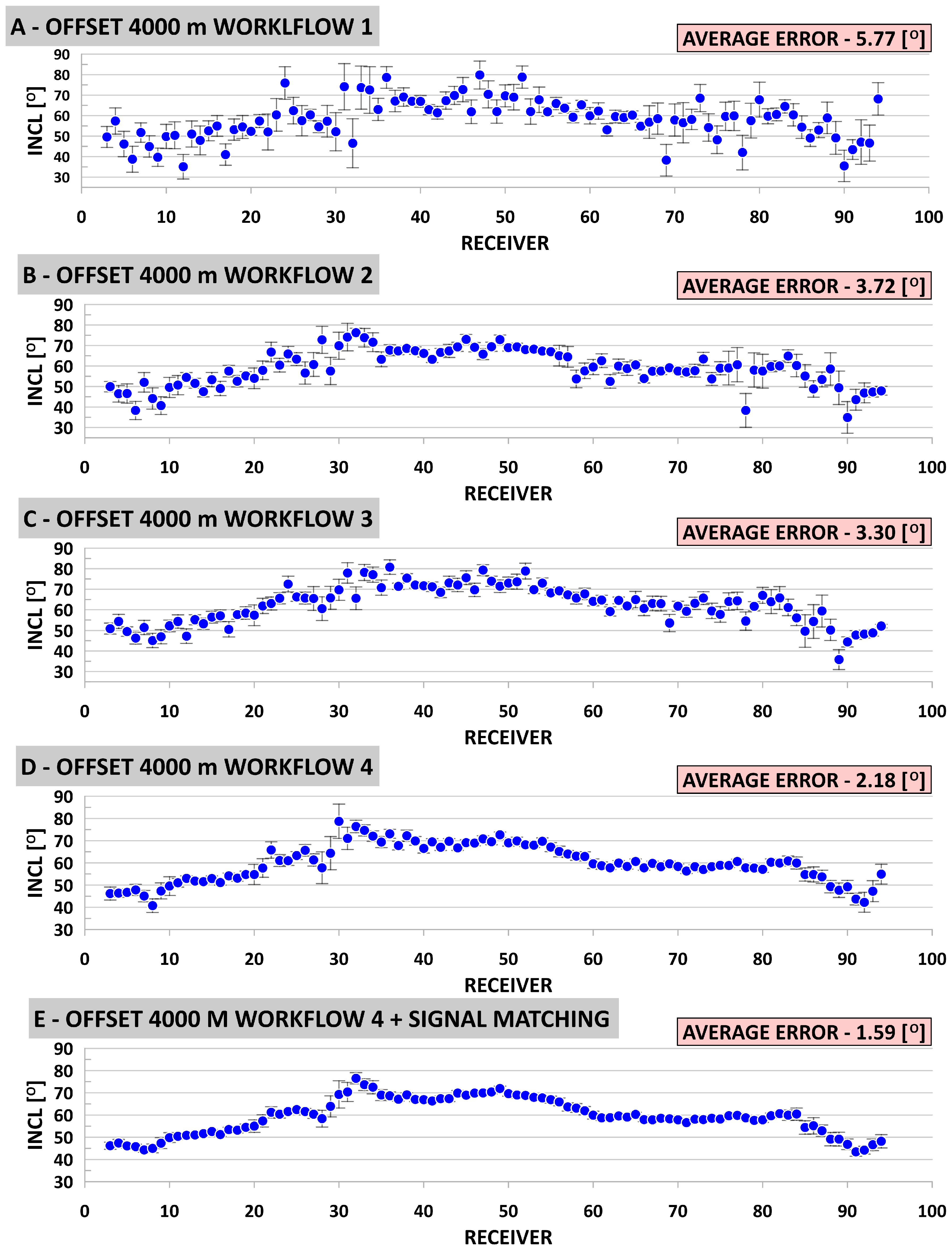
To evaluate this methodology, we plotted estimated inclinations for near-offset SP in
Figure 8 (offset 300 m) and for far-offset SP in
Figure 9 (4000 m). In both cases, the lowest average error was obtained using workflow 4 with the additional signal-matching procedure. For both offsets, the least optimal workflow was workflow 1 because the Principal Components Method (PCM), which we used for component rotations, needs the first-break times on its input. In this step, the downgoing P-wave energy is used. The window that defines this energy should be centralized around the first-break time. In workflow 1, the first step was first-break picking. We performed hand picking because it was impossible to use an automatic picker due to noise. Performing first-break picking on this step is not very accurate due to the interference between the signal and the noise. These phenomena can lead to changes in the maximum and minimum amplitude position of the signal. This, on the other hand, may cause incorrect determination of the first-break times. Workflow 2 has a slightly lower error than workflow 1 because vertical stacking reduces some random noise; as a result, the first-break picking accuracy can be higher. However, this error increases with the offset. For near-offset shot points, the relative change of average error is not as significant as for shot points located in the far offsets. For the 300 m offset, the average error of workflow 2 is approximately 6% lower compared to workflow 1, while for the 4000 m offset there is a 35% difference. Data processed using workflow 3 have a smaller error compared to data from workflows 2 and 3. The smallest error was obtained using workflow 4. Importantly, adding a matching filter to the workflow with the lowest average error significantly improved the inclination estimation. Compared to workflow 1, the average error reduction for workflow 4 with the signal-matching procedure applied is approximately 71% lower for the near-offset shot point, and it is 83% lower for the far-offset shot point. In the case of original workflow 4, adding the signal-matching procedure resulted in 47% lower error for the near offset and 37% lower error for the far offset.
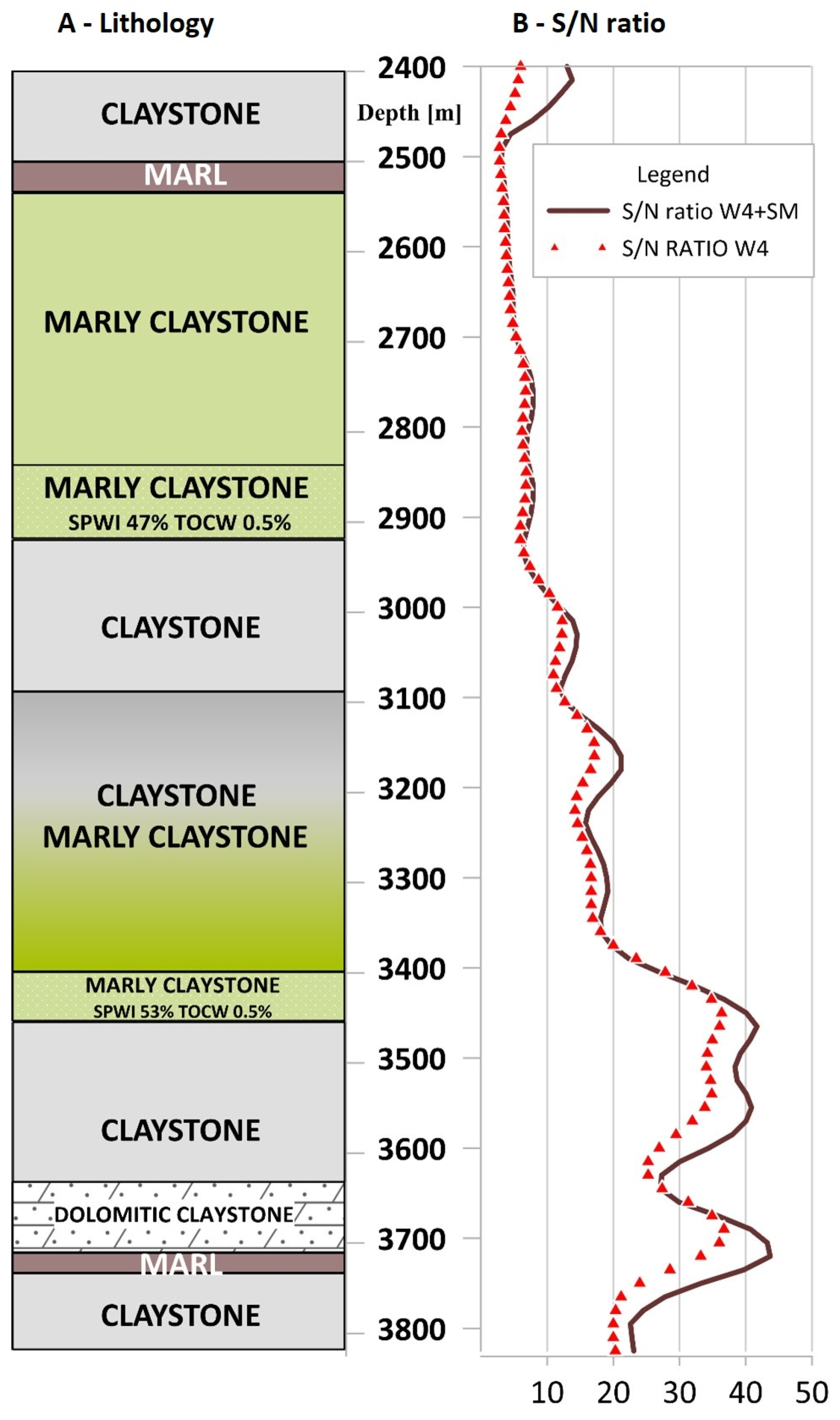
Figure 10 shows a comparison between the S/N ratio for workflow 4 and workflow 4 with the signal-matching procedure with reference to the lithostratigraphic column. We can see a similar phenomenon as in
Figure 6: a lower S/N ratio in the depth interval where there is no casing between the inner and the outer tube. The significantly greater value of the S/N ratio can be seen in the Ludlow depth interval. This geological complex is built of marly claystone with SPWI 53%, then marl and claystone on the bottom. Note that the signal-matching procedure improved the S/N ratio, which is important for component rotation and, consequently, also for estimation of inclination angles.
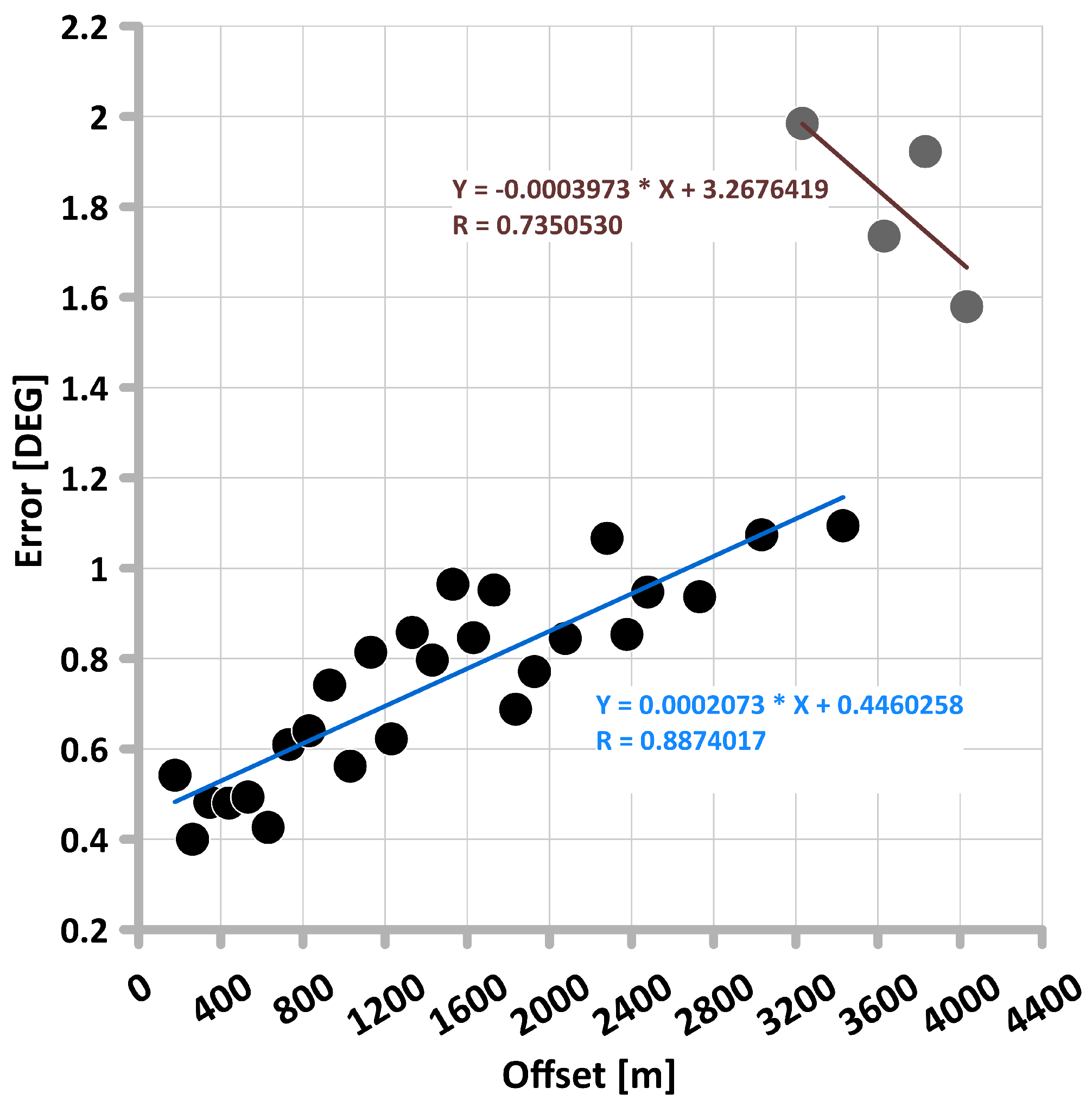
Figure 11 shows a plot of average errors (
y axis) for workflow 4, and the signal-matching procedure against the offset (
x axis). It can be seen that the error increases linearly as the offset increases. However, there are two groups: the first is from the beginning to the offset at approximately 3200 m, and the second group is from the offset at 3200 m to the offset at 4400 m. The first group has a strong positive linear trend and the error varies from 0.3 to 1.2, while the second group shows a negative linear trend. The highest error value is 2 for the smallest offset of this group; as the offset decreases, the error also subsequently decreases to a value of 1.6. However, there are not enough points to fully interpret this phenomenon. The reason for this is probably related to the aforementioned acquisition problems. The final field report states that some far offset points were skipped because the data quality was below the acceptance level and the ground conditions.
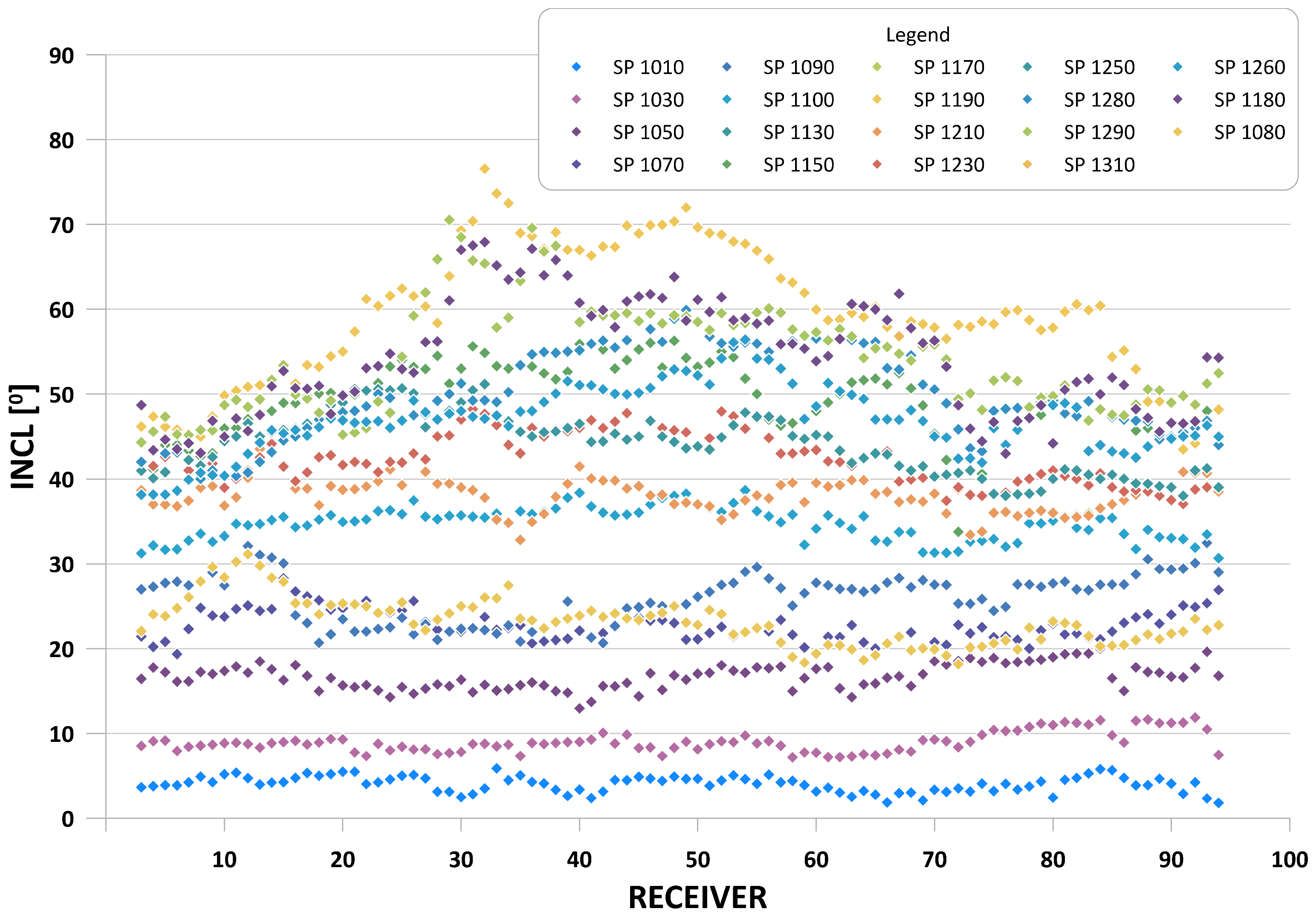
Figure 12 shows inclination distributions for the different offsets used for further calculations for estimation of anisotropy parameters.
4. Local Anisotropy Estimation
Several methods allow the determination of anisotropy based on VSP data including slant stack [
12], slowness [
13], and slowness-polarization method [
4]. We used the slowness-polarization method described by Grechka and Mateeva [
4] because information about polarizations stabilizes the solution and simplifies the inversion process [
4]. Additionally, we wanted to obtain anisotropy parameters at a given depth without entering layer boundaries and any additional assumptions beforehand. Grechka and Mateeva used this methodology for 2D walkaway VSP data gathered in the Gulf of Mexico, where receivers were partially placed inside salt. They proved that estimated in situ anisotropy coefficients can be correlated with lithology and other geophysical methods such as gamma-ray measurement. In the case of vertical transverse isotropy (VTI) media, Grechka and Mateeva speculated that parameter
(Alkhalifah and Tsvankin’s anellipticity coefficient [
14]) could be slightly less correlated to the lithology than
(Thomsen’s anisotropic coefficient [
15]). This is mostly because of the dependence of
on local stress anomalies. Our goal was to show that this methodology can be used even if anisotropy is extremely small. Grechka and Mateeva [
4] worked with data acquired in a medium with an anisotropic complex beneath salt and almost isotropic salt. This paper presents the equations necessary to perform the inversion. A detailed mathematical and theoretical description of this method is presented in the appendices of Grechka and Mateeva’s paper [
4]. The slowness-polarization method starts from the weak-anisotropy approximation. Each time we refer to
and
in Equations (3)–(19), we mean vertical
P and
S velocity. In the case of a VTI medium, it can be described by Equation (
3) using vertical slowness (
q), P-wave inclination angle (
),
anisotropic coefficient [
15],
anellipticity coefficient [
14], and
velocity. The P-wave slowness polarization vector
p component is then described by
where
is the inclination angle.
In the case of a VTI medium and measurements in a vertical well, the anisotropic dependence
q(
) is controlled by
(more sensitive to near-offset
q(
) variations) and
(more sensitive to far-offset
q(
) variations), see Equations (4)–(6):
If one wants to invert directly for
and
, the
ratio has to be known beforehand. The average value of
/
in Well W-1 is 0.54, therefore the average
is 0.29 according to Equation (
7):
Using Equation (
7),
can be described by
The approximation in Equation (
8) is used only for the sake of simplification, presenting the theoretical relationships between the parameters
, and
. In fact, we are calculating the
directly in every depth point.
Finally, Equation (
3) can be written using
in Equation (
9):
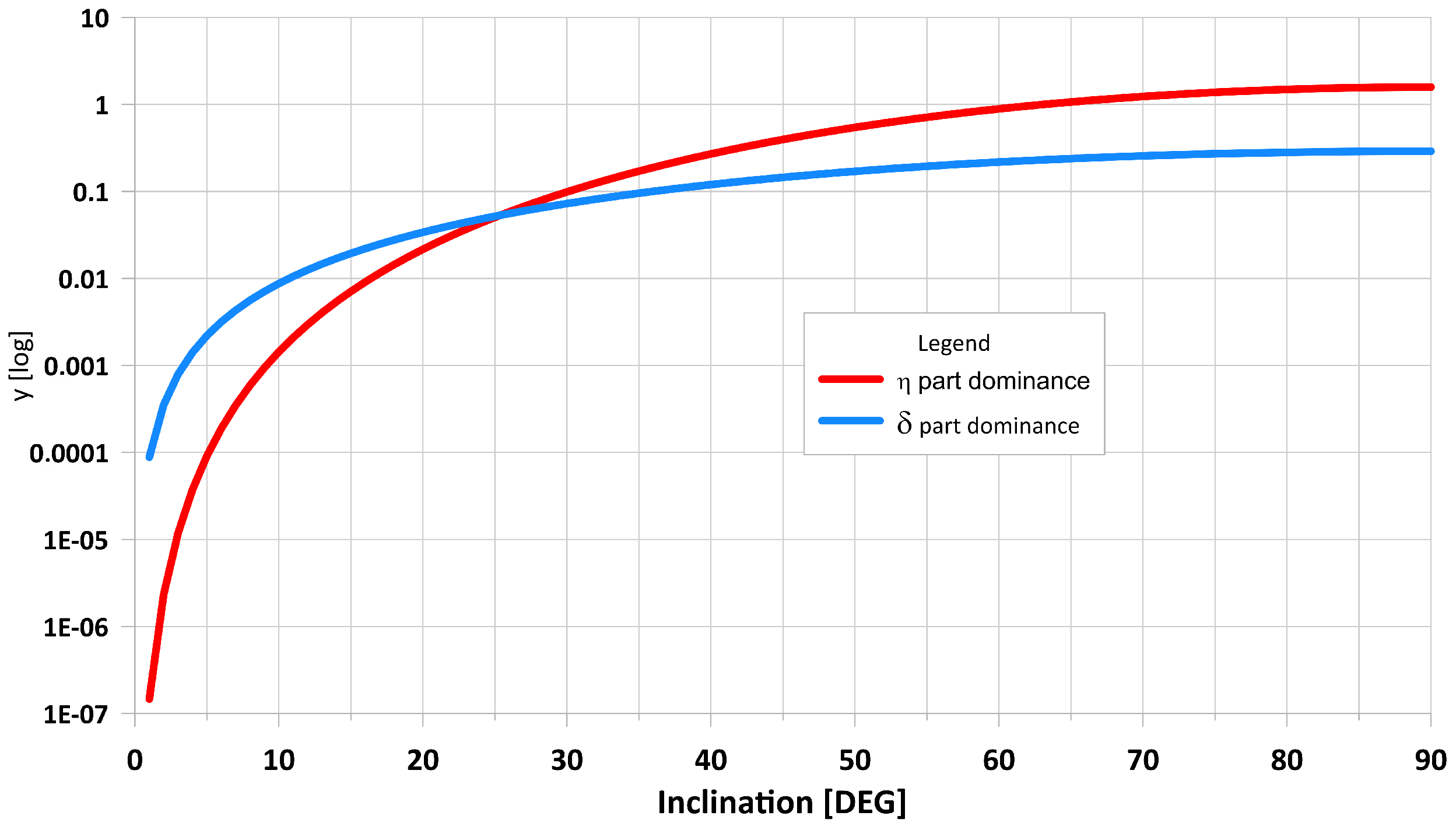
To better understand the dependencies of
and
with
on the offset, an average
value of 0.29, and (1 + 2
) equal to 1.58, the dependency graph is shown in
Figure 13.
Figure 13 shows that average polarization angles below 25° are for shot points numbered 1010 to 1180, which correspond to an offset from 0 to 1700 m, and in this range the polarization vector is mostly influenced by the
part in Equation (
9). For offsets from 1700 to 4000 m, the polarization vector is mostly influenced by
(angles over 25°). Thus, it is obvious that for reliable inversion a wide spectrum of polarization angles is needed. The theoretical minimum of
can be calculated using the following equation ([
16]):
which is equal to −0.7034 with an average
of 0.28. For the inversion, we need to specify the parameters that will be estimated. These parameters are stored in the vector
k:
Vertical
is calculated without weak anisotropy approximation, directly from Equations (12)–(15):
where
is polarization vector,
is slowness vector,
is polar phase angle, and
V(
) is the phase velocity of the P-wave. Now, using Christoffel’s equation and the Voigt notation for stiffness coefficient
, the relation between
and
can be estimated using Equation (
14) (see in [
4], Appendix B):
When
+
is not 0, the phase velocity is equivalent to the same wave mode. Solving the linear equation by eliminating variable
V results in the following:
Considering anisotropic rocks, we know that the equation has two roots because
>
and
>
in this medium. These roots correspond to the phase angle whose difference between the polarization angle of the P and SV wave is the smallest. The phase velocity is a square root of the Christoffel equation’s greatest eigenvalue, therefore
can be calculated using Equation (
13). The last step is to minimize the objective function by changing the values of the elements of vector
k:
where
describes the errors, which are estimated using the following equation:
where
is the P-wave velocity from the sonic tool. The minimization process of function
starts from an isotropic medium assumption, where vector
k is equal to
is calculated using
where
N is the number of the considered depth points.
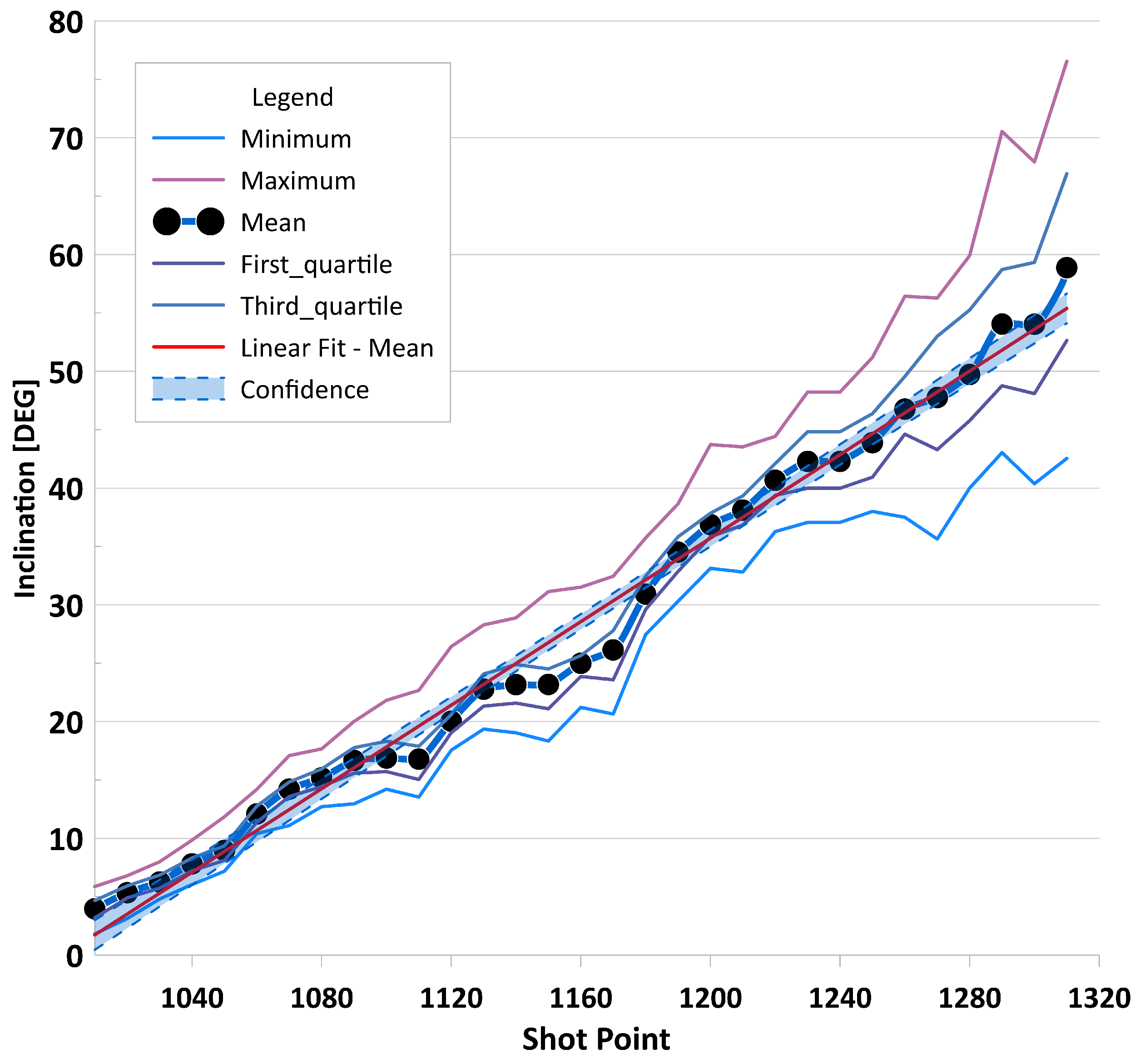
Estimated average P-wave polarization angles for the different shot points along the profile and errors of their estimation (calculated according to Equation (
2)) are characterized by a stable linear increase with offset, which is visible in
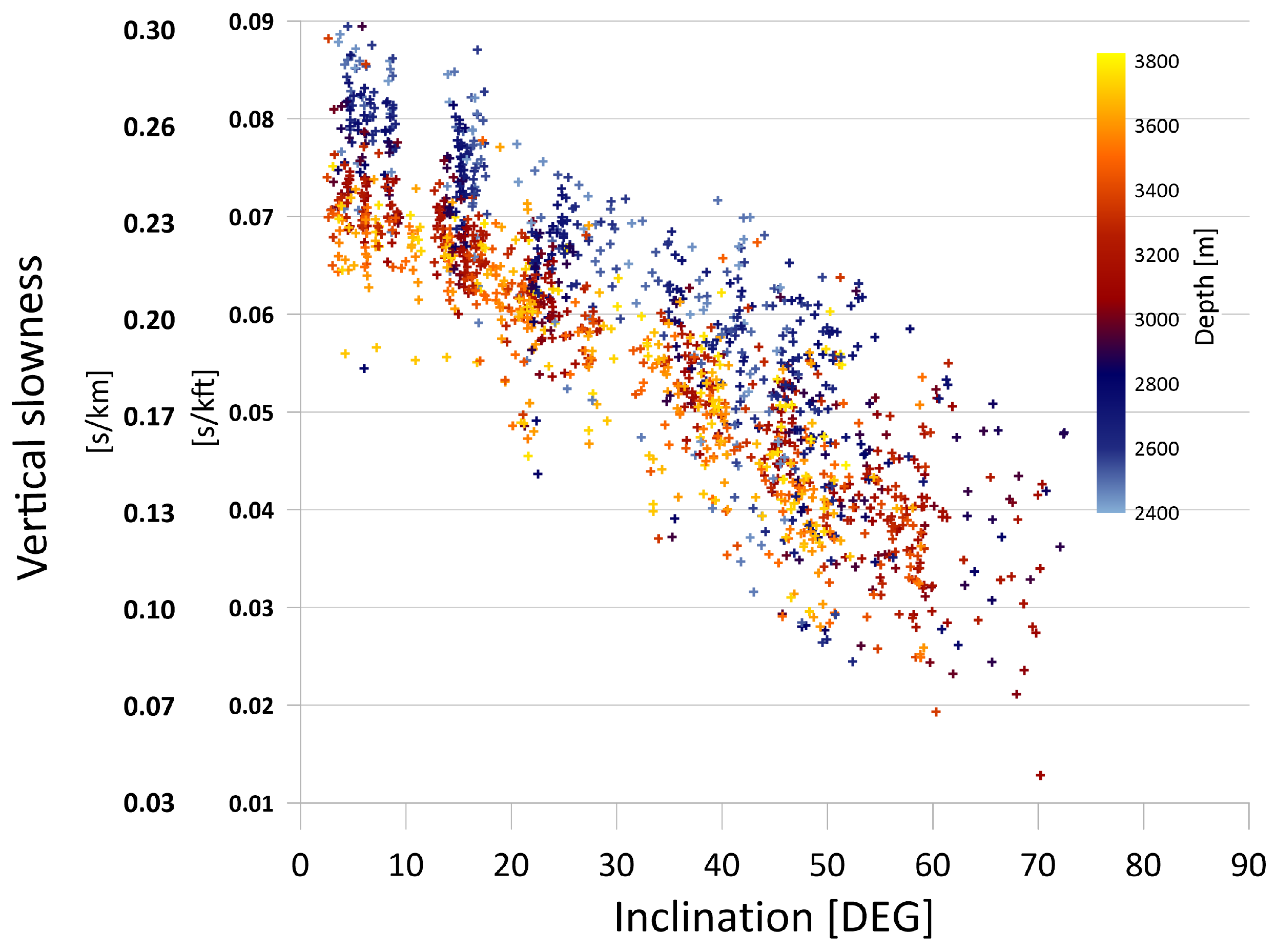
Figure 14. Two areas that deviate from the trend line can be found: one around shot point 1120 (offset around 1230 m) and the other around shot points 1140–1180 (offset 1400–1800 m). We can assume that this is because vibrator trucks did not reach the designated points on the profile. Therefore, they were moved to other locations close to those points but not on the profile line. Another reason could be related to record quality. Besides the observed deviation, we decided to use these data for the anisotropy calculation. In
Figure 15, the vertical slowness versus offset graph is presented for all offsets and depth points. Colors represent different depth points. It can be seen that depending on the depth, the difference in elastic properties is obvious. The downward shift along the
Y-axis is caused mostly by the velocity increase with depth because Equations (3) and (9) contain the component
, by which the whole equation is multiplied.
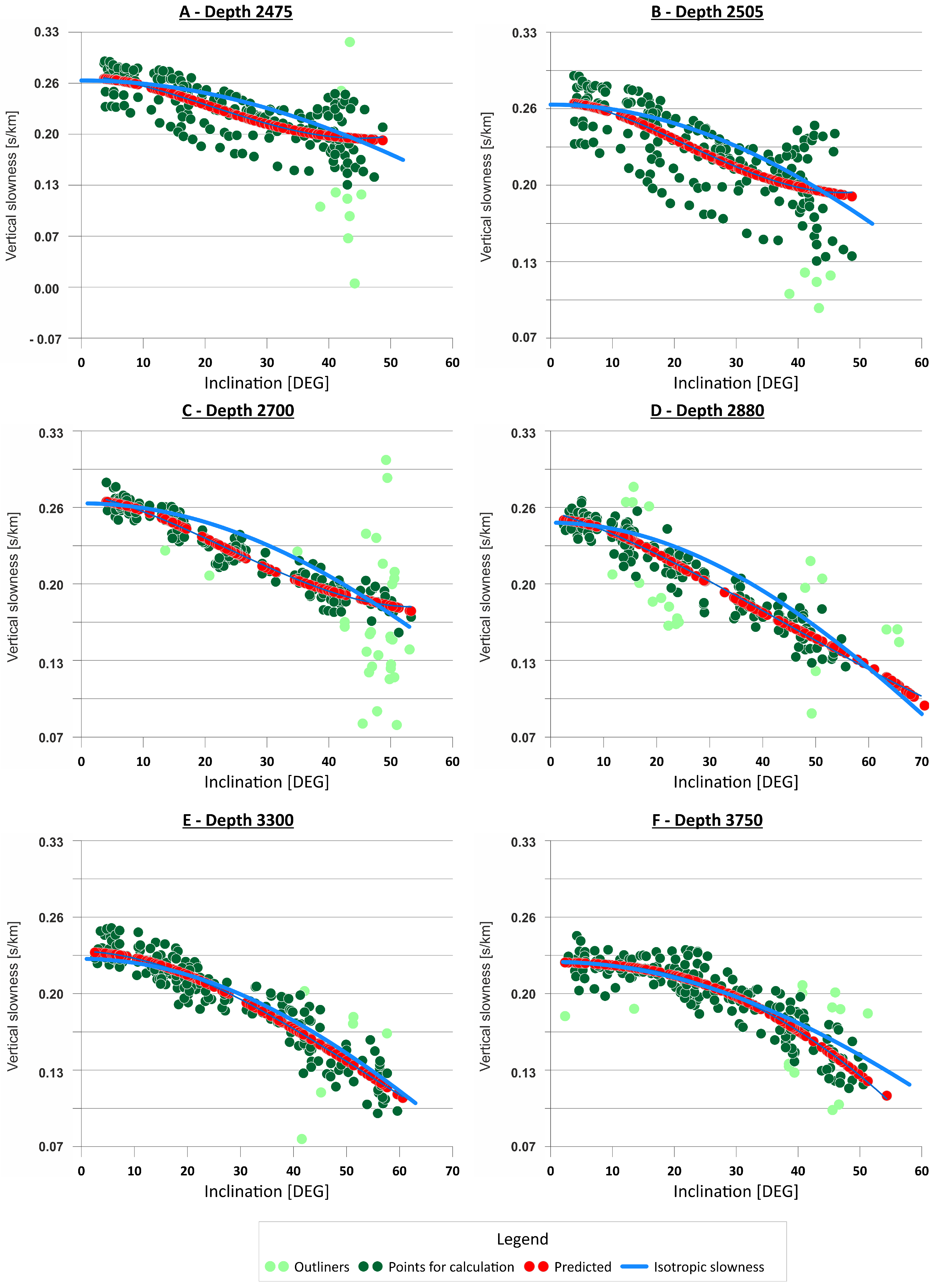
Figure 16 shows a vertical slowness polarization graph for six depth intervals: 2475, 2505, 2700, 2880, 3300, and 3750 m. Green points (dark and light ones) represent all data prepared for the inversion process before validation. Dark green points were used for inversion calculation, and red represents the predicted values. The blue line is calculated according to the assumption that the geological medium is isotropic. For a depth interval of 2880 m, which reaches the top of the marly mudstone layer and is potentially saturated with gas, there is a noticeable shift between the predicted points and the calculated isotropic vertical slowness line from angle 10°. As mentioned before, for inclinations over 25° the
parameter dominates the solution of the slowness-polarization equation.
Figure 16 presents raw estimated parameters (
,
) with no smoothing after inversion. Both parameters reach their absolute maximum at depth point 2880. At depth points 2475 (
Figure 16A) and 2505 (
Figure 16B), a similar shift can be observed between the isotropic vertical slowness line and the predicted points. The absolute values of the estimated parameters reach their maximum before a rapid change to almost zero. This change can be observed on the border between claystone and the very thin marl layer. Jakobsen and Johansen [
17] made a detailed anisotropic approximation in their research on mudrocks. They showed that a negative value of
is observed in specific kinds of mudrocks. Additionally, they ran a simulation of in situ stress in this kind of rock and examined its impact on Thomsen’s parameters, and the values of
were negative. In
Figure 16C, at depth 2700 m the shift between the predicted values and the isotropic curve can be seen; again, it is more noticeable for angles over 10°. This is the center of another claystone layer (bottom 2850 m). We can observe similar values of
and
as in the first claystone layer. Then (
Figure 16D), at depth 2880 in the thin layer of saturated marly claystone, the separation between the isotropic vertical slowness line and the predicted values increases, and the anisotropic parameters have higher absolute values. Going down from depth 2950 to 3400, the thin layer of claystone sits on a thicker layer of claystone and marly claystone. In the clear claystone layer (bottom of the layer at depth 3100 m),
and
have similar values as in the previous claystone layers. In the layer where claystone transitions into marly claystone, the anisotropic parameters’ values become closer to zero. This effect can be observed in
Figure 16E, in which the isotopic vertical slowness line crosses the predicted points. A change from negative to positive values in both parameters can also be seen where the marly claystone transitions into dolomitic claystone. In
Figure 16F, the theoretical isotropic vertical slowness line passes through the center of the predicted points. Again, this is a very thin marl layer where
and
are close to zero. These results clearly show that the presented P-wave-only VSP data inversion methodology can be used for lithology studies. Moreover, the estimated anisotropic parameters are reliable and can be used even if the elastic anisotropy of the geological medium is relatively small (on the limit of detection by surface seismic methods). Bandyopadhyay [
18] showed that in a laminated geological medium, the sign of Thomsen’s parameters can be used as fluid identification, and small values of Thomsen’s parameters could be related to the compaction regime.
We also calculated the following parameters:
, which is used as a lithology identifier (Equation (
20)), and Poisson’s ratio using Equation (
21). We decided to plot it against the parameters estimated from VSP inversion to analyze its relative change according to the lithology and to compare the sensitivity of these parameters to lithological changes. Thomsen [
15] proved that
can be used for lithology correlation in rocks with transverse isotropy. Ryan Grigor in 1997 [
19] came to similar conclusions. For an isotropic medium, the
should directly depend on changes in the Poisson’s ratio, which is unique [
20]. This factor is not unique for an anisotropic medium [
21].
where
is sonic P-wave velocity and
is sonic wave velocity from horizontal X-component.
In the case of well W-1, it does not matter whether
or
(from the sonic tool) was selected for the calculations as they are almost equal to each other. The average
ratio for the whole investigated depth range is 0.9987.
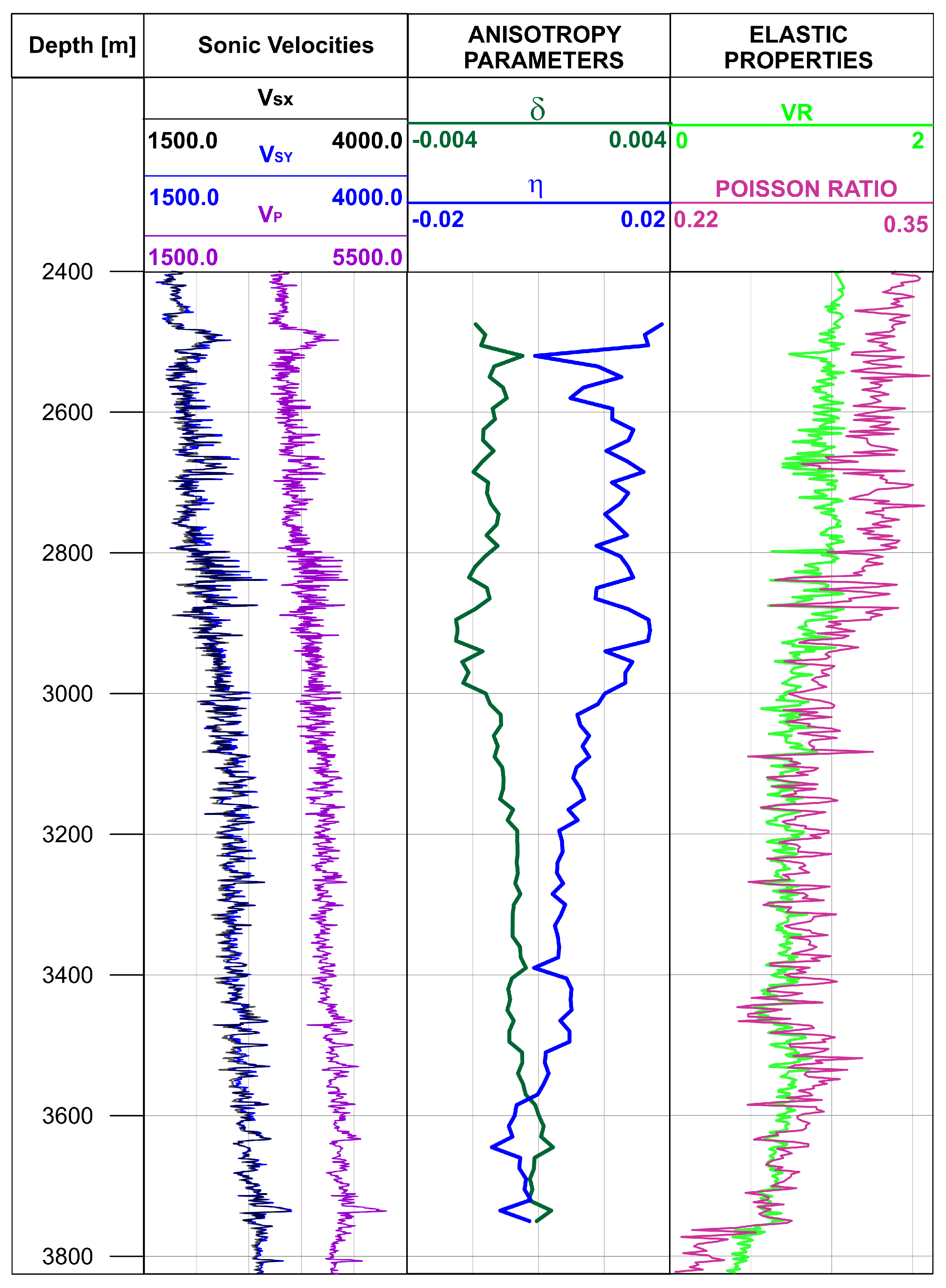
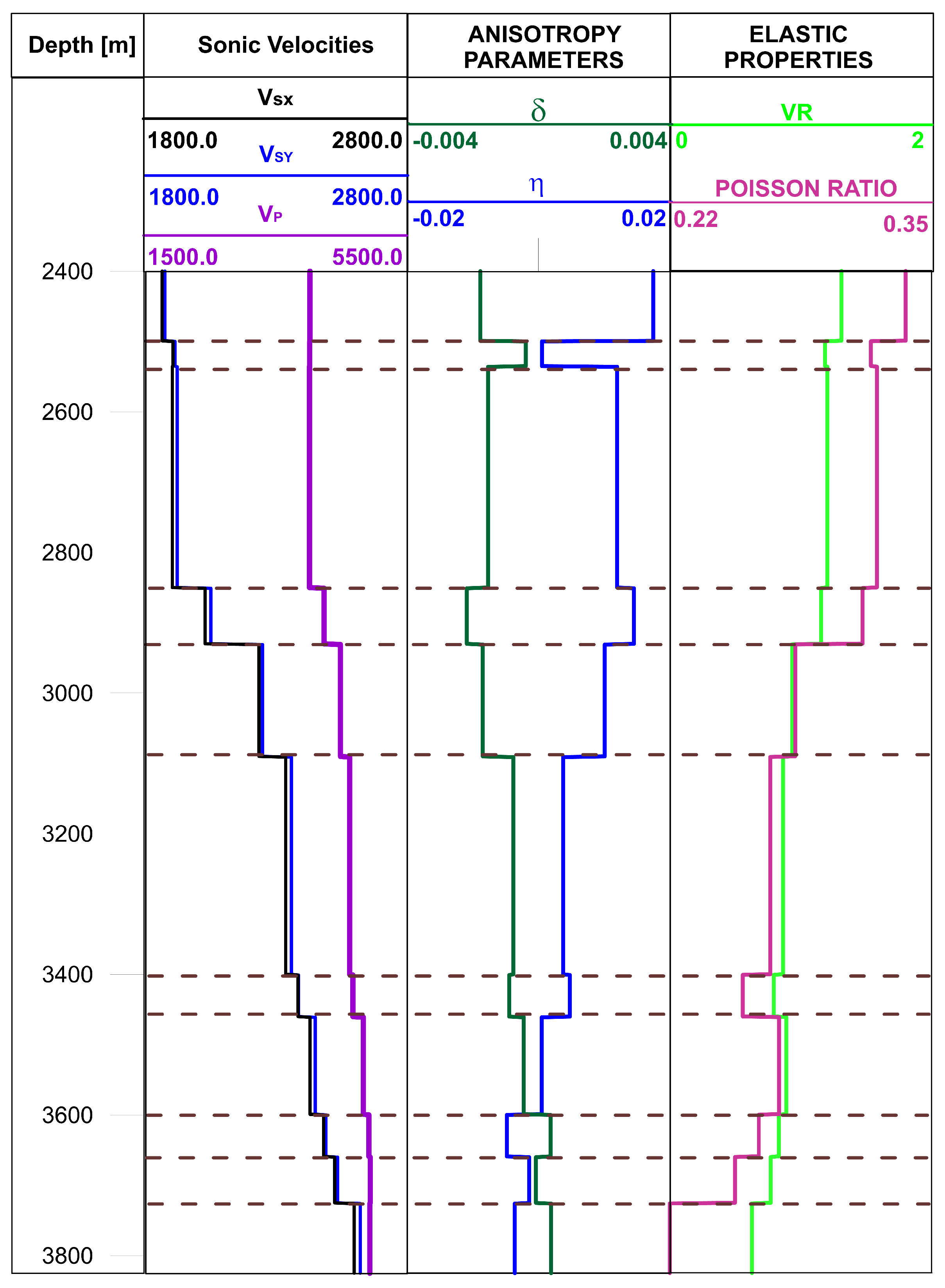
Figure 17 shows sonic
,
,
velocities;
and
from VSP inversion; and
with Poisson ratio.
Figure 18 shows the same parameter set averaged to the single value in the layers. In the first marl layer, rapid changes in
and
are clearly visible, whereas the other parameters remain stable. A similar situation is observed in the thin marl layer located at a depth below 3700 m. Again, there is almost no change in
and
velocity. A similar situation can be noticed in saturated marly claystone. The relative change in VSP anisotropic parameters is more visible than in
. The change in the sonic velocities is noticeable, but their ratio remains almost unchanged. An interesting phenomenon can be observed when claystone transitions into dolomitic claystone, where the signs pf the parameters
and
change. In Jakobsen and Johansen’s [
17] laboratory studies on the anisotropy of mudrocks, positive
was present in the rocks with low porosity, while negative values were related to higher porosity value.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















