
Model-Based Predictive Rotor Field-Oriented Angle Compensation for Induction Machine Drives

Abstract
1. Introduction
2. Induction Machine Control Model
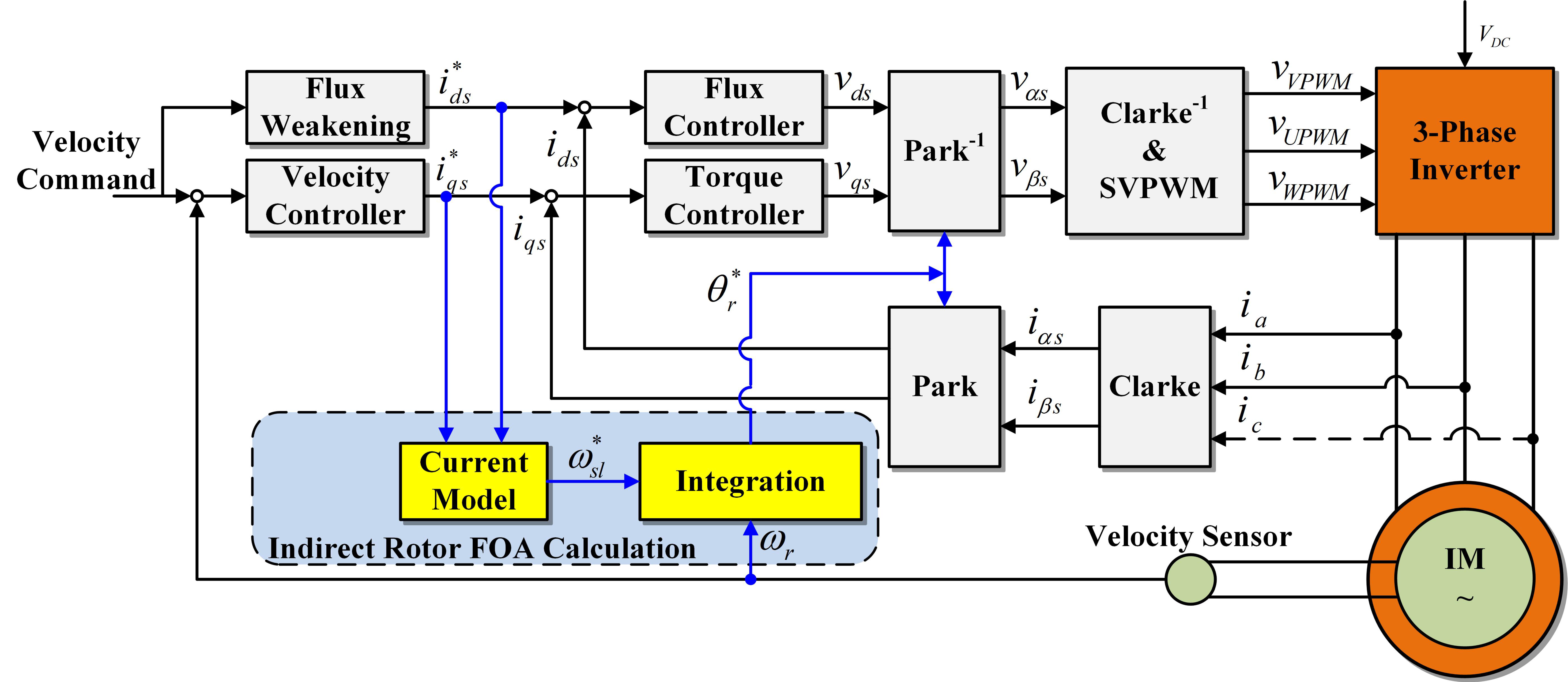
2.1. Induction Machine Model
2.2. Discrete-Time Model
3. Model-Based Predictive Algorithm and Implementation
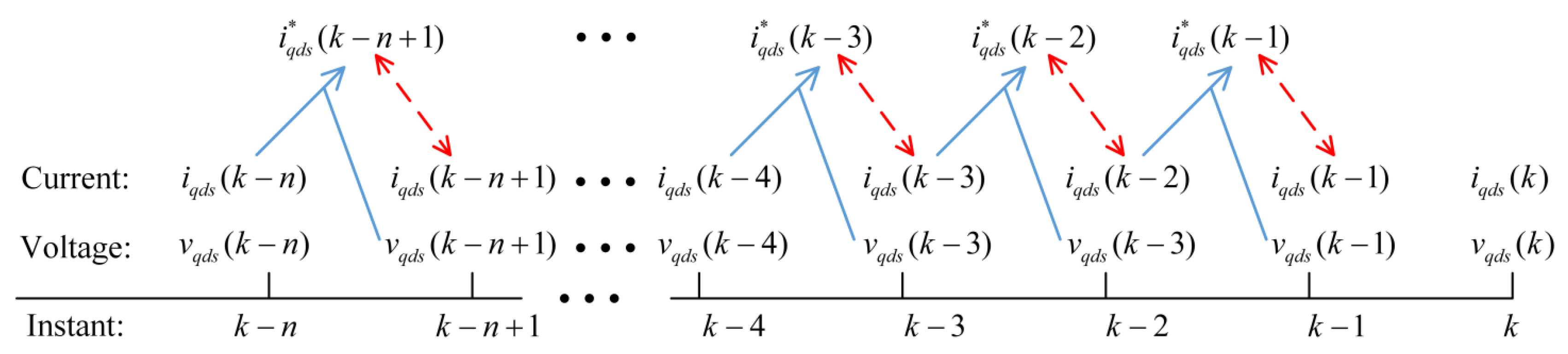
3.1. Model-Based Predictive Algorithm
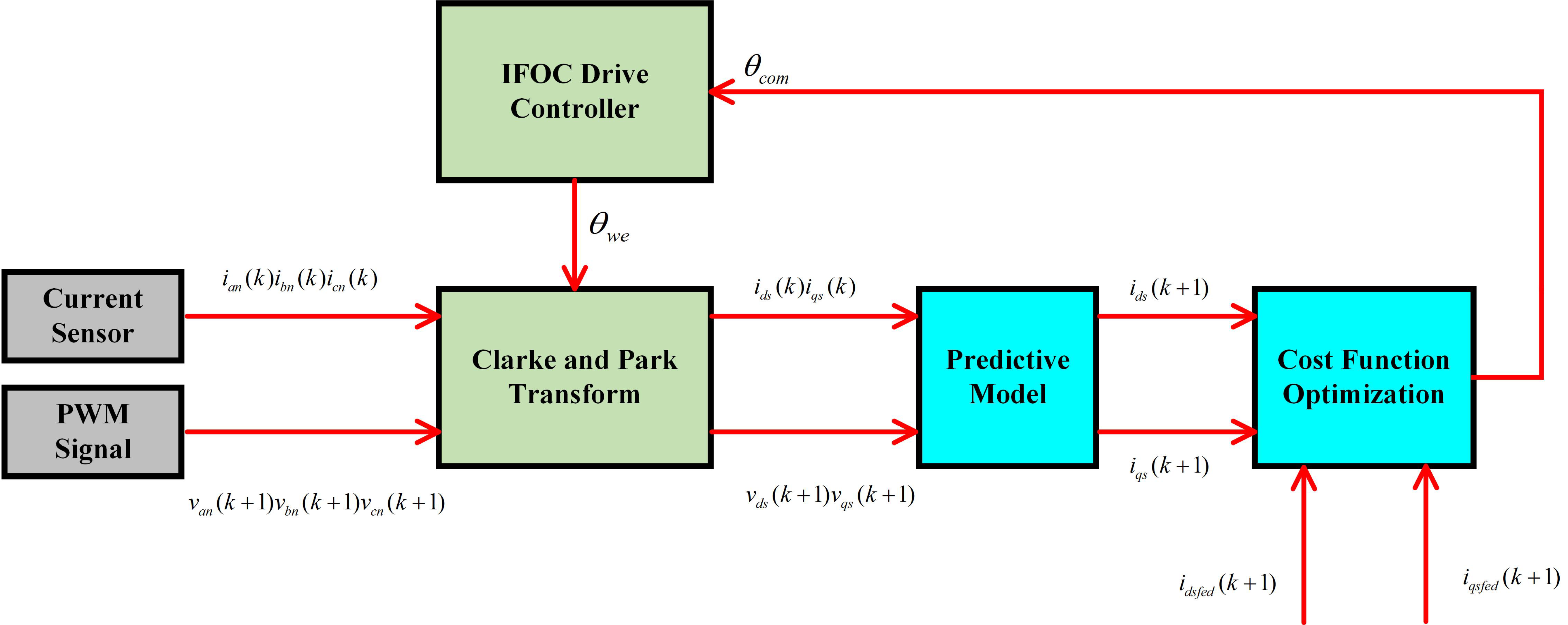
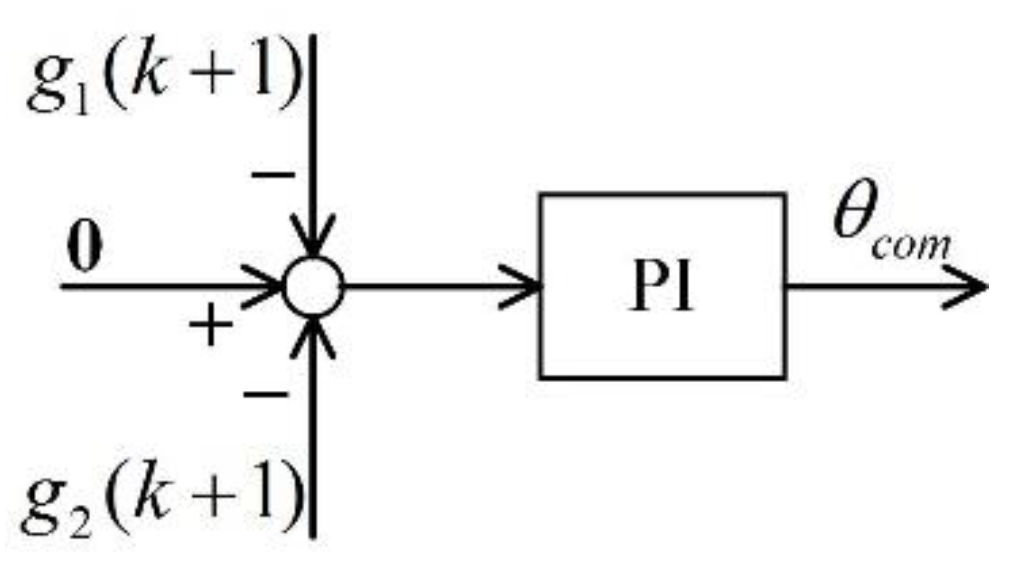
3.2. Implemented Algorithm
4. Simulation Results
4.1. System Description
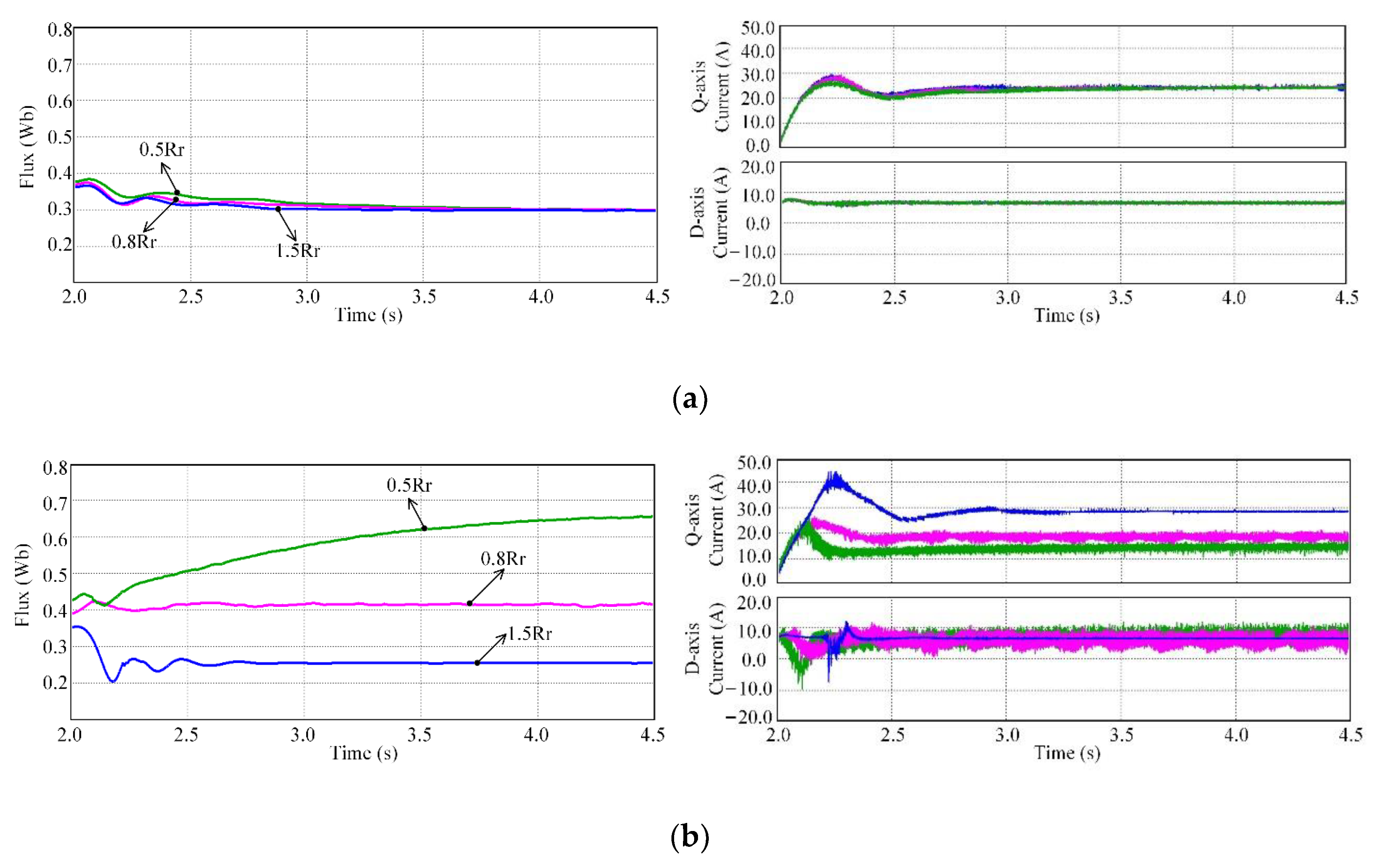
4.2. Simulated Results
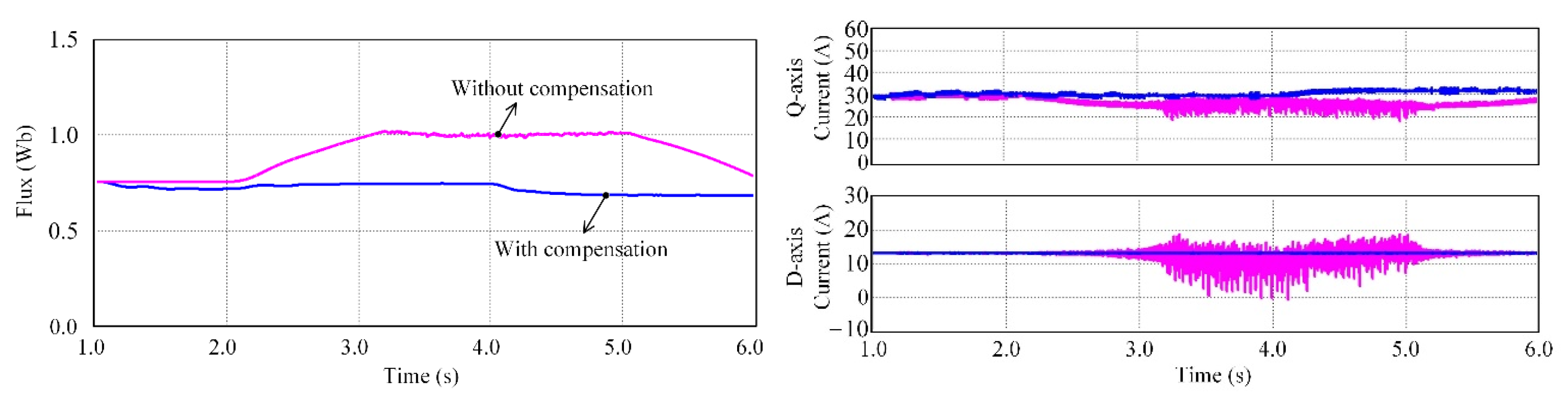
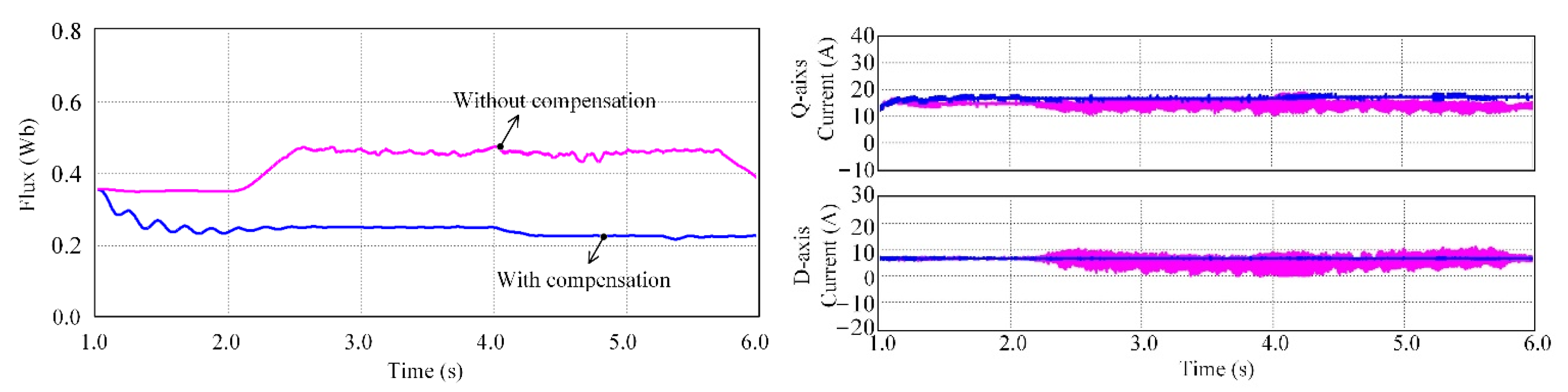
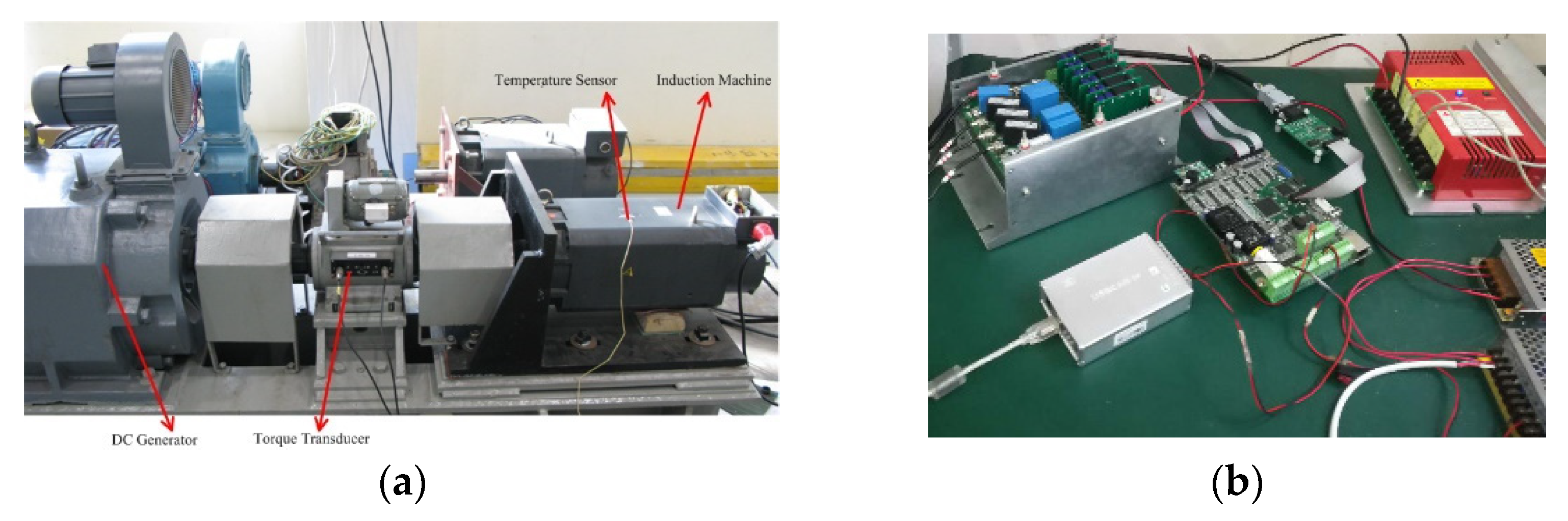
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Lin, F.J.; Liao, Y.H.; Lin, J.R.; Lin, W.T. Interior Permanent Magnet Synchronous Motor Drive System with Machine Learning-Based Maximum Torque per Ampere and Flux-Weakening Control. Energies 2021, 14, 346. [Google Scholar] [CrossRef]
- Wu, C.; Yang, J.; Li, Q. GPIO-Based Nonlinear Predictive Control for Flux-Weakening Current Control of the IPMSM Servo System. Energies 2020, 13, 1716. [Google Scholar] [CrossRef]
- Zhou, K.; Ai, M.; Sun, D.; Jin, N.; Wu, X. Field Weakening Operation Control Strategies of PMSM Based on Feedback Linearization. Energies 2019, 12, 4526. [Google Scholar] [CrossRef]
- Marques, G.D.; Iacchetti, M.F. Field-Weakening Control for Efficiency Optimization in a DFIG Connected to a DC-Link. IEEE Trans. Ind. Electron. 2016, 63, 3409–3419. [Google Scholar] [CrossRef]
- Wang, K.; Yao, W.; Chen, B.; Shen, G.; Lee, K.; Lu, Z. Magnetizing Curve Identification for Induction Motors at Standstill Without Assumption of Analytical Curve Functions. IEEE Trans. Ind. Electron. 2014, 62, 2144–2155. [Google Scholar] [CrossRef]
- Ruan, J.Y.; Wang, S.M. Magnetizing Curve Estimation of Induction Motors in Single-phaseMagnetization Mode Considering Differential Inductance Effect. IEEE Trans. Power Electron. 2015, 31, 497–506. [Google Scholar] [CrossRef]
- Al-Jufout, S.A.; Al-Rousan, W.H.; Wang, C. Optimization of Induction Motor Equivalent Circuit Parameter Estimation Based on Manufacturer’s Data. Energies 2018, 11, 1792. [Google Scholar] [CrossRef]
- Alonge, F.; Cirrincione, M.; D’Ippolito, F.; Pucci, M.; Sferlazza, A. Parameter Identification of Linear Induction Motor Model in Extended Range of Operation by Means of Input-Output Data. IEEE Trans. Ind. Appl. 2013, 50, 959–972. [Google Scholar] [CrossRef]
- Guimaraes, J.; Bernardes, J.; Hermeto, A.; Bortoni, E. Parameter determination of asynchronous machines from manufacturer data sheet. IEEE Trans. Energy Convers. 2014, 29, 689–697. [Google Scholar] [CrossRef]
- Liu, Y.; Fang, J.; Tan, K.; Huang, B.; He, W. Sliding Mode Observer with Adaptive Parameter Estimation for Sensorless Control of IPMSM. Energies 2020, 13, 5991. [Google Scholar] [CrossRef]
- Wang, K.; Chen, B.; Shen, G.; Yao, W.; Lee, K.; Lu, Z. Online Updating of Rotor Time Constant Based on Combined Voltage and Current Mode Flux Observer for Speed-Sensorless AC Drives. IEEE Trans. Ind. Electron. 2013, 61, 4583–4593. [Google Scholar] [CrossRef]
- Bao, D.; Wu, H.; Wang, R.; Zhao, F.; Pan, X. Full-Order Sliding Mode Observer Based on Synchronous Frequency Tracking Filter for High-Speed Interior PMSM Sensorless Drives. Energies 2020, 13, 6511. [Google Scholar] [CrossRef]
- Wang, C.; Cao, D. New Sensorless Speed Control of a Hybrid Stepper Motor Based on Fuzzy Sliding Mode Observer. Energies 2020, 13, 4939. [Google Scholar] [CrossRef]
- Comanescu, M. Design and Implementation of a Highly Robust Sensorless Sliding Mode Observer for the Flux Magnitude of the Induction Motor. IEEE Trans. Energy Convers. 2016, 31, 649–657. [Google Scholar] [CrossRef]
- Dominguez, J.R. Discrete-Time Modeling and Control of Induction Motors by Means of Variational Integrators and Sliding Modes—Part II: Control Design. IEEE Trans. Ind. Electron. 2015, 62, 6183–6193. [Google Scholar] [CrossRef]
- Stojic, D.; Milinkovic, M.; Veinovic, S.; Klasnic, I. Improved Stator Flux Estimator for Speed Sensorless Induction Motor Drives. IEEE Trans. Power Electron. 2015, 30, 2363–2371. [Google Scholar] [CrossRef]
- Yoon, Y.D.; Sul, S.K. Sensorless Control for Induction Machines Based on Square-Wave Voltage Injection. IEEE Trans. Power Electron. 2014, 29, 3637–3645. [Google Scholar] [CrossRef]
- Smith, A.N.; Gadoue, S.M.; Finch, J.W. Improved Rotor Flux Estimation at Low Speeds for Torque MRAS-Based Sensorless Induction Motor Drives. IEEE Trans. Energy Convers. 2015, 31, 270–282. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Rodriguez, J.; Young, H.; Marquez, A.; Zanchetta, P. Model Predictive Control: A Review of Its Applications in Power Electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef]
- Yaramasu, V.; Rivera, M.; Wu, B.; Rodriguez, J. Model Predictive Current Control of Two-Level Four-Leg Inverters—Part I: Concept, Algorithm, and Simulation Analysis. IEEE Trans. Power Electron. 2012, 28, 3459–3468. [Google Scholar] [CrossRef]
- Barrero, F.; Bermudez, M.; Duran, M.J.; Salas, P.; Gonzalez-Prieto, I. Assessment of a Universal Reconfiguration-less Control Approach in Open-Phase Fault Operation for Multiphase Drives. Energies 2019, 12, 4698. [Google Scholar] [CrossRef]
- Guzman, H.; Duran, M.J.; Barrero, F.; Zarri, L.; Bogado, B.; Prieto, I.G.; Arahal, M.R. Comparative Study of Predictive and Resonant Controllers in Fault-Tolerant Five-Phase Induction Motor Drives. IEEE Trans. Ind. Electron. 2016, 63, 606–617. [Google Scholar] [CrossRef]
- Druant, J.; Vyncke, T.; Melkebeek, J.A. Adding inverter fault detection to model-based predictive control for flying-capacitor inverters. IEEE Trans. Ind. Electric. 2015, 62, 2054–2063. [Google Scholar] [CrossRef]
- Uebel, S.; Murgovski, N.; Baker, B.; Sjoberg, J. A Two-Level MPC for Energy Management Including Velocity Control of Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 5494–5505. [Google Scholar] [CrossRef]
- Buerger, J.; East, S.; Cannon, M. Fast Dual-Loop Nonlinear Receding Horizon Control for Energy Management in Hybrid Electric Vehicles. IEEE Trans. Control. Syst. Technol. 2018, 27, 1060–1070. [Google Scholar] [CrossRef]
- Alcala, E.; Puig, V.; Quevedo, J.; Cayuela, V.P.; Casin, J.Q. TS-MPC for Autonomous Vehicles Including a TS-MHE-UIO Estimator. IEEE Trans. Veh. Technol. 2019, 68, 6403–6413. [Google Scholar] [CrossRef]
- Liniger, A.; Lygeros, J. Real-Time Control for Autonomous Racing Based on Viability Theory. IEEE Trans. Control. Syst. Technol. 2019, 27, 464–478. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Generalized Two-Vector-Based Model-Predictive Torque Control of Induction Motor Drives. IEEE Trans. Power Electron. 2015, 30, 3818–3829. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Two-Vector-Based Model Predictive Torque Control Without Weighting Factors for Induction Motor Drives. IEEE Trans. Power Electron. 2016, 31, 1381–1390. [Google Scholar] [CrossRef]
- Akpunar, A.; Iplikci, S. Runge-Kutta Model Predictive Speed Control for Permanent Magnet Synchronous Motors. Energies 2020, 13, 1216. [Google Scholar] [CrossRef]
- Bao, G.; Qi, W.; He, T. Direct Torque Control of PMSM with Modified Finite Set Model Predictive Control. Energies 2020, 13, 234. [Google Scholar] [CrossRef]
- Richter, J.; Doppelbauer, M. Predictive Trajectory Control of Permanent-Magnet Synchronous Machines With Nonlinear Magnetics. IEEE Trans. Ind. Electron. 2016, 63, 3915–3924. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Machine Type | 3 ph IM | Stator leakage inductance | 3.3 mH |
| Rated power | 7.5 kW | Rotor leakage inductance | 5.6 mH |
| Rated speed | 1450 rpm | Magnetizing inductance | 56.4 mH |
| Maximum speed | 12,000 rpm | Inertia | 0.029 kgm2 |
| Rated frequency | 50 Hz | Number of pole pairs | 2 |
| Rated torque at rated speed | 48.8 Nm | Rated DC-line voltage | 540 V |
| Stator resistance | 0.374Ω | Rated rotor flux level | 0.73 Wb |
| Rotor resistance | 0.267Ω | Rated current | 18.8 A |
| Without Compensation | With Compensation | |||||
|---|---|---|---|---|---|---|
| (A) | 17.1 | 15.01 | 17.9 | 14.9 | 14.92 | 14.95 |
| 26.1 | 26.5 | 42.2 | 30.1 | 30 | 30.15 | |
| 1.52 | 1.77 | 2.35 | 2.02 | 2.01 | 2.02 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zhao, J.; Yin, Q. Model-Based Predictive Rotor Field-Oriented Angle Compensation for Induction Machine Drives. Energies 2021, 14, 2049. https://doi.org/10.3390/en14082049
Liu Y, Zhao J, Yin Q. Model-Based Predictive Rotor Field-Oriented Angle Compensation for Induction Machine Drives. Energies. 2021; 14(8):2049. https://doi.org/10.3390/en14082049
Chicago/Turabian StyleLiu, Yang, Jin Zhao, and Quan Yin. 2021. "Model-Based Predictive Rotor Field-Oriented Angle Compensation for Induction Machine Drives" Energies 14, no. 8: 2049. https://doi.org/10.3390/en14082049
APA StyleLiu, Y., Zhao, J., & Yin, Q. (2021). Model-Based Predictive Rotor Field-Oriented Angle Compensation for Induction Machine Drives. Energies, 14(8), 2049. https://doi.org/10.3390/en14082049