1. Introduction
High robustness and reliability are the main features of induction motors (IM). Yet, to achieve high performance and robust digital control of IM, it is essential to use advance control strategies which require accurate IM parameters [
1,
2,
3,
4]. Rated parameters obtained from a manufacturer are prone to the drift caused by the impact of production procedure, ambient temperature, and other specific conditions of drive, and therefore cannot be used, especially if high performances are required. This is especially the case in a drive application where low voltage IM modified with low voltage/flux conditions and with some essential parametric enlarged ratios is used. For that reason, the modification of an IM parameter identification procedure is necessary for usage in low voltage IM traction drives.
Parameter identification techniques for IM can be classified into two main categories: Online and offline parameter identification techniques. Overall review of the major parameter identification techniques for IM can be found in overview papers [
5,
6,
7]. While online parameter identification techniques enable parameter adaptation during drive operation, offline techniques require special testing conditions. Among offline parameter estimation techniques, self-commissioning technique can be classified. Every modern inverter-fed IM drive requires the self-commissioning process to be initiated prior to the drive continuous operation. Self-commissioning techniques are usually based on the injection of DC or AC test signals in IM in order to determine unknown motor parameters [
5]. Typically, two or more voltage or current test signals with different frequencies or amplitude are injected, and the input impedance of the IM equivalent circuit is measured. These sorts of techniques are called impedance equation set techniques (IES techniques) [
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20].
The self-commissioning technique presented in this paper is based on the injection of two sinusoidal test signals with different frequencies and the measurement of the input impedance of the IM inverse “Γ” lumped equivalent circuit. The technique is developed and adapted to be applicable for the real high efficiency, low voltage IM traction drive. Such a special application requires different approaches and adjustments in order to apply self-commissioning techniques on a real drive. For signal processing procedure, in order to extract a symmetry-related fundamental harmonic from the non-symmetrical test signal excitation during the self-commissioning, the cascaded delay signal cancellation (DSC) filter is used. Different approaches are used in novel literature for the same purpose. An author in [
8] uses Fourier Series Expansion (FSE) method, while authors in [
9] use Fast Fourier Transformation (FFT) in combination with low pass filters. In the Ph.D. thesis [
10], the author suggests the use of the resonant filter tuned exactly at the injection frequency of AC test signals. Interesting research was given in [
11,
12], denoting the specific choice of injection frequency to be applied during the IM self-commissioning process to avoid parameter sensitivity and non-modeled dynamic issues. In paper [
13], it is suggested to use step current excitation command to identify the IM magnetization parameter. However, it is worth mentioning that the “Γ” lumped equivalent circuit provides a good IM model approximation only when sinusoidal voltage test signals are injected, thus reducing the reliability of the method itself. The robust approach, which copes with the noise-free estimation and non-linearity involved within the parameter estimation, represents the implementation of the Recursive Least Square estimator (RLS), as given in [
14,
15,
16]. Papers [
14,
15] suggest the use of the least square algorithm in linear parametrization form, yet both introduce the necessity of estimating the second-order time derivative of stator currents by involving the measurement of the first time derivative of both voltage and currents. A different problem is found in [
16], which suggests the more natural choice of regression variables within the estimation model, though it introduces the computationally demanding two-stage non-linear RLS. Authors in [
17] propose the automatic procedure for estimating the IM parameters at a standstill by using the machine transient analysis. The approach combining two simple neural networks in parallel, reported in [
18], estimates the stator resistance and self-inductance at low-frequency range and rotor parameters along with the leakage effects at the high-frequency range. Publications referenced within [
19,
20] enlist the problems of estimating the magnetization curve in standstill operation, but ultimately fail to solve the sensitivity problems.
All of the given proposals are impractical for real-time implementation, due to high computation burden. Moreover, the reliability of the presented state-of-the-art is questionable from the viewpoint of the use of fault-safe current-injection methodology as an excitation paradigm. Such an approach does not fully comply to the IM inverse “Γ” lumped equivalent circuit derived by the assumption of voltage supply operation. For these reasons, many modifications have been made to implement the proposed self-commissioning technique on the real low voltage IM traction drive. First, although the reference sinusoidal voltage or current test signals with known phase and amplitude are commanded during the self-commissioning, actual inverter output voltages or currents are being measured and processed in the algorithm of the technique. Second, an improved and more practical signal processing procedure based on the cascaded delay signal cancellation (DSC) filter is used. Finally, IM measured phase voltage and current signals are already available for drive control in the rotating dq frame, and they are used for the implementation of the self-commissioning technique. All of the above listed modifications significantly increased the accuracy of the parameter estimation, without the increase of the firmware complexity or the computation burden to the microcontroller. The effectiveness of the proposed improved self-commissioning technique is verified with a set of computer simulations and experiments on the real low voltage IM traction drive.
2. Theory and Basic Principle of the Self-Commissioning Technique
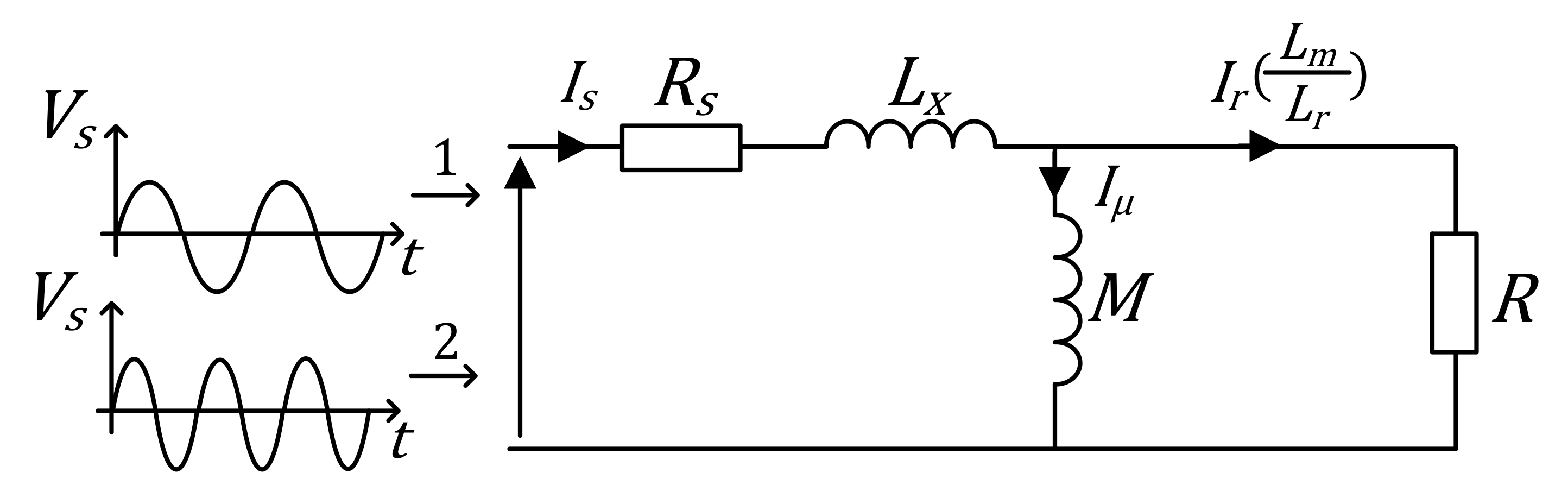
The fundamental principle of the proposed technique is based on determining IM equivalent circuit parameters from the total motor impedance. During the test, IM is supplied with a single-phase sinusoidal supply to maintain rotor stationary, which is necessary for situations where the rotation is not allowed during the self-commissioning process. If IM is fed with a single-phase supply, only a pulsating magnetic field is generated, which does not create continuous starting torques. Therefore, one can extract the information regarding IM parameters. Additionally, if the physical insight and observation are employed, a more practical and straightforward solution for parameter estimation can be derived. Precisely, it is advisable to employ the analysis of the single-phase excitation in the formalism of decoupled rotating magnetic fields of related symmetry. Observing the positive- or negative-sequence rotating phasors of terminal machine variables, such as stator voltages and currents, the complete parameter set of IM can be determined. To formulate the equations for the proposed self-commissioning technique, the inverse “Γ” equivalent circuit shown in
Figure 1 is considered. The main reason for using the inverse “Γ” equivalent circuit is simplicity and the possibility to convert parameters to “T” equivalent circuit. The parameters of the inverse “Γ” equivalent circuit derived in relation to the parameters of “T” equivalent circuit are defined as:
—the rotor winding resistance referred to the stator windings;
—the magnetizing inductance;
—the stator and rotor leakage inductances referred to the stator windings.
The total impedance of the IM phase circuit shown in
Figure 1, when single-phase voltage/current supply is applied, can be calculated as a ratio of the voltage phasor at the motor winding
and the phase current passing through a given winding
, where φ represents the phase shift of the current relative to the voltage at a given frequency of the test signal ω. The real and the imaginary parts of the total impedance at the frequency ω of the test signal are represented with
and
.
For the practical calculation of overall input impedance, it is necessary to measure voltage and current magnitude as well as the power factor considered with the parameter
in (1). Therefore, the complex notation, as presented in (2), is more desirable than (1), since the power factor measurement is usually omitted:
Relation (2) implies the necessity of adopting advanced computing for the calculation of real and imaginary parts of the input impedance .
On the other hand, total input impedance as a function of the supply frequency
observed from the viewpoint of the equivalent circuit shown in
Figure 1 can be expressed as follows:
where real and imaginary parts
and
are:
Since the stator resistance
parameter is estimated priorly, the real and the imaginary part of the total impedance, when the test signal with the frequency
is applied, can be derived as follows:
Limitation of the frequency of the applied sinusoidal test signal should be in a specific range. If the test signal frequency is set too low, the imaginary part cannot be measured; if it is set too high, the skin effect in the rotor windings, machine slot-induced harmonics reaction, and/or other non-modelled dynamics can be triggered. Therefore, it is recommended that the frequency of the test signal is in a range of the rated slip of IM.
Equations (6) and (7) represent the nonlinear set of two equations with three unknown parameters (
,
,
), which, due to the degree of uncertainty within the system, cannot be solved. For this reason, it is necessary to use two test signals, and another impedance at different test frequency (
) has to be measured. The real and the imaginary part of impedance at the test frequency (
) are:
With the introduction of the second test signal, the equation system (6) to (9) becomes oversized and redundant. However, by carefully combining four equations, one can extract three unknown parameters to determine the unique solution. Nonlinear equation system (6) to (9) has an analytic solution by combining Equations (6)–(8):
The only approach to obtain an analytic solution introduces
and
to calculate the parameters
and
first, as in (10) and (11). For that reason, the parameter
has two possible solutions, which can be obtained from the Equations (7) or (9). The first solution for the parameter
is presented in the Equation (12), and it is derived considering the imaginary part of the total impedance at the test frequency (
), which is given by Equation (7). The other solution for the parameter
relies on the imaginary part of total impedance at the test frequency (
), which is derived from Equation (9) as follows:
The solutions for the parameter
(12) and (13) are expected to match perfectly, since there is no significant dependency between leakage inductance and supply frequency. Yet, due to the errors during the measurement process, they may slightly vary to a certain level. For those reasons, a more precise solution for the parameter
is given by Equation (14), where the arithmetic mean of (12) and (13) suppresses the measurement uncertainty.
The stator winding resistance parameter
used in (4) is measured first. The procedure is based on the injection of two DC voltage test signals of different values (
,
) in order to cancel measurement offset and/or inverter nonlinearities [
10]. Due to the DC excitation, a stationary magnetic field is produced, and no starting torque is induced. With stator currents measured in the steady state (
), the influence of inductances is avoided, and the unknown stator resistance
is measured accurately using a simple Equation (15). Phasor formalism and advanced computing due to the non-availability of power factor measurement are avoided since voltages and current are in phase due to injected DC test signals.
3. Practical Implementation Aspects
The effectiveness of the proposed technique depends on the accuracy of two successive measurements of the real and imaginary part of total stator impedance, performed for two different test frequencies. Considering (2), the following equations in
dq reference frame are derived:
The accuracy of measurement of real and imaginary part results based on (16) and (17) is affected by both single-phase supply unbalanced condition and the non-linearity of the inverter as a voltage source.
The single-phase supply is provided only in one phase of stator windings, thus creating unbalanced condition in IM during the self-commissioning technique. Unbalanced condition is a consequence of supplying only the α axes with the sinusoidal test signal, resulting in non-constant variables in dq reference frame. Yet, pulsating magnetic field formed from single-phase supply can be decoupled on direct and inverse rotating magnetic fields with opposite directions. After Park transformation, the dq reference frame will rotate synchronously with the direct magnetic field, while the inverse rotating magnetic field will rotate twice faster in the opposite direction and produce undesirable sinusoidal components with a double frequency of the test signal.
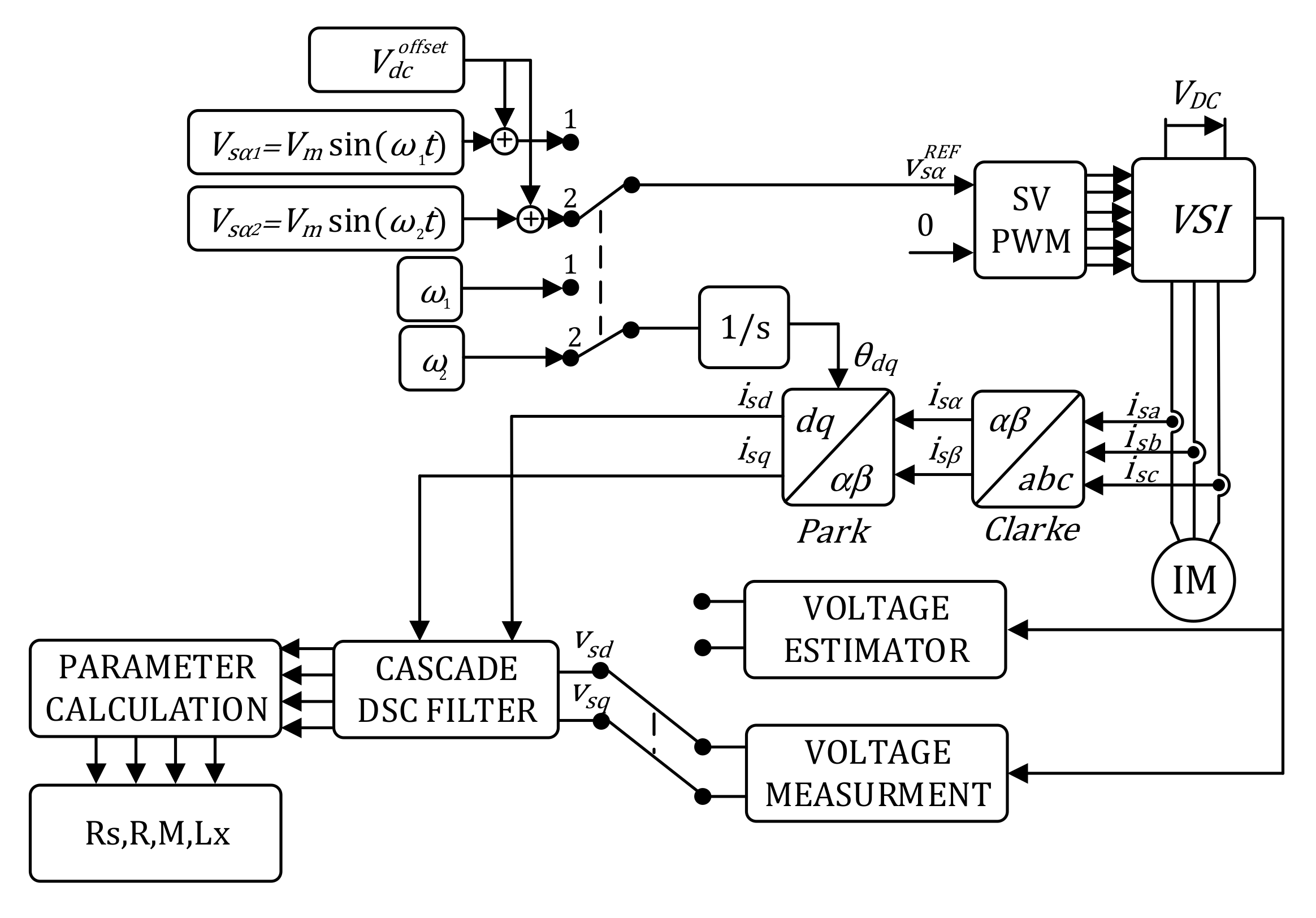
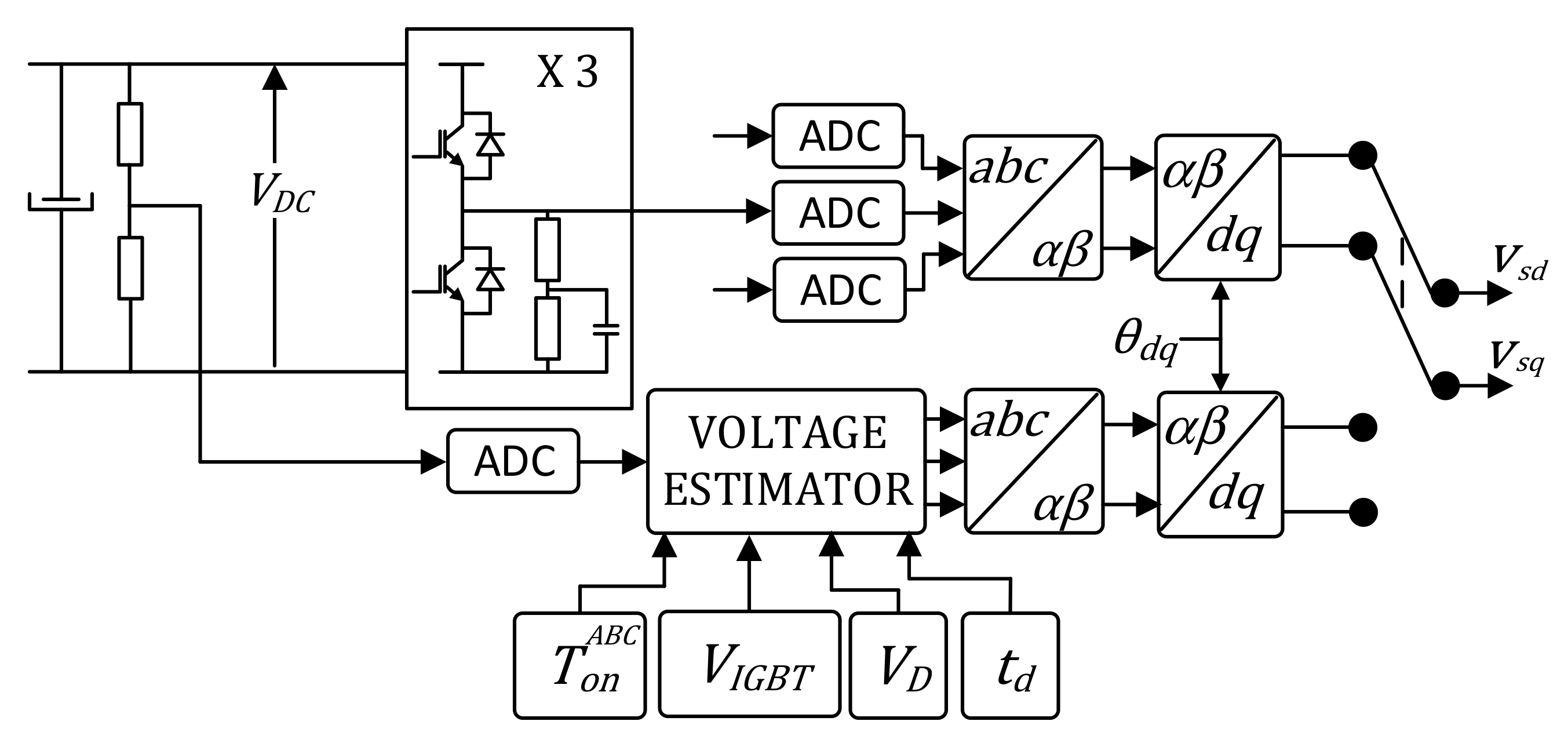
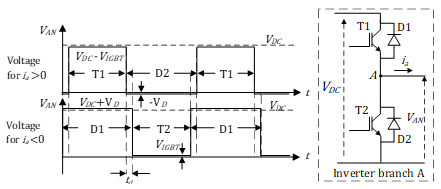
The proposed self-commissioning technique is also affected by the nonlinearity of inverter, which is the consequence of power electronic component voltage drops, switching transients, inserted dead time, and PWM signal propagation delay [
21,
22]. This nonlinearity creates the harmonic distortions of both voltage and current waveforms, and therefore makes the signal processing procedure more sensitive. To avoid zero crossing, and to minimize the influence of the inverter nonlinearity on the output voltage waveform, the DC offset is added to the original sinusoidal test signal. Yet, the added DC offset produces an undesirable sinusoidal component with the same frequency as the frequency of the AC test signal in the
dq reference frame, which has to be removed during the signal processing phase.
The new advance solution for the filtration of voltage and current in the
dq reference frame is an implementation of the cascade delay signal cancellation filter (DSC filter). DSC filter is an effective and robust method for the detection of positive- and negative-sequence components of voltages and currents in a vast range of applications [
23,
24,
25,
26]. After the DSC filter, even with an unbalanced test signal, all variables in the
dq reference frame become constant values, and it is possible to represent them as complex numbers, which would make Equations (16) and (17) solvable.
The general principle of the DSC filter is the summation of the original signal, which has an undesirable harmonic component on a specific known frequency and the original signal, which is phase-shifted for the appropriate number of periods in order to cancel an undesirable harmonic component. Therefore, the transfer function of the DSC filter is defined as:
where
represents the constant complex gain of the transfer function,
is the sample rate of a discrete-time signal,
is the number of samples to which the original signal is phase-shifted, and
rotates the delayed signal by the angle
. Due to the summation of the phase-shift and the original signal, a newly created signal has to be divided with two, which implicates that the parameter
is set to 0.5. The other parameters of DSC for eliminating the specific harmonic component, which is undesirable, are depicted in
Table 1. The DSC filter is not usable to filter some stochastic signal; therefore, the harmonic order of undesirable components has to be known.
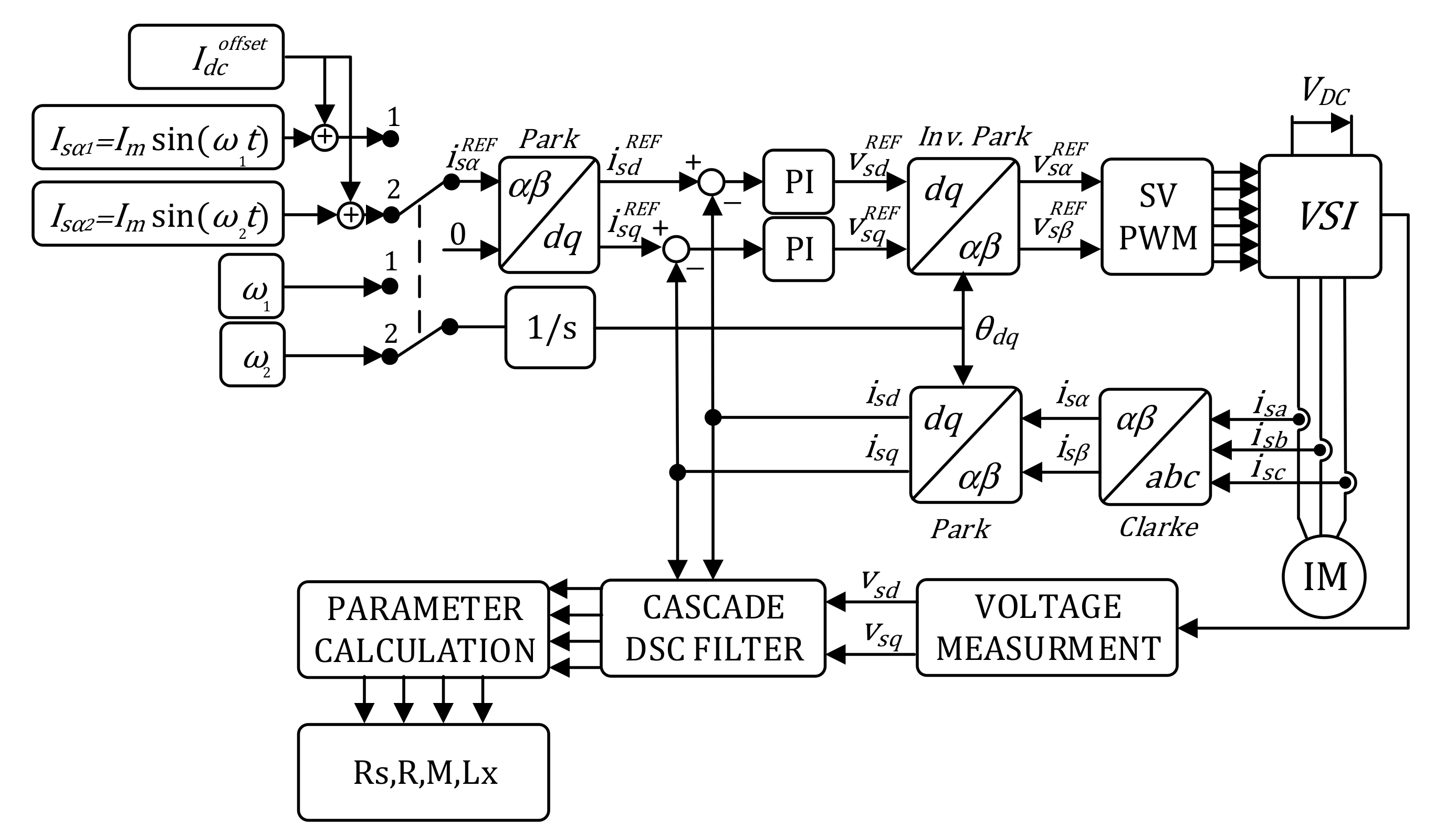
The cascade DSC filter is implemented both in the Matlab/Simulink toolbox, for computer simulation, and in the microcontroller for the experimental verification of the proposed technique. Two DSC filters are connected cascading to a row, with the first filter used for suppressing the component with the double frequency of the test signal originating from the inverse rotating field, and the second filter suppressing the component with the frequency of test signal related to the DC offset.
4. Self-Commissioning Technique Evaluation through Computer Simulation
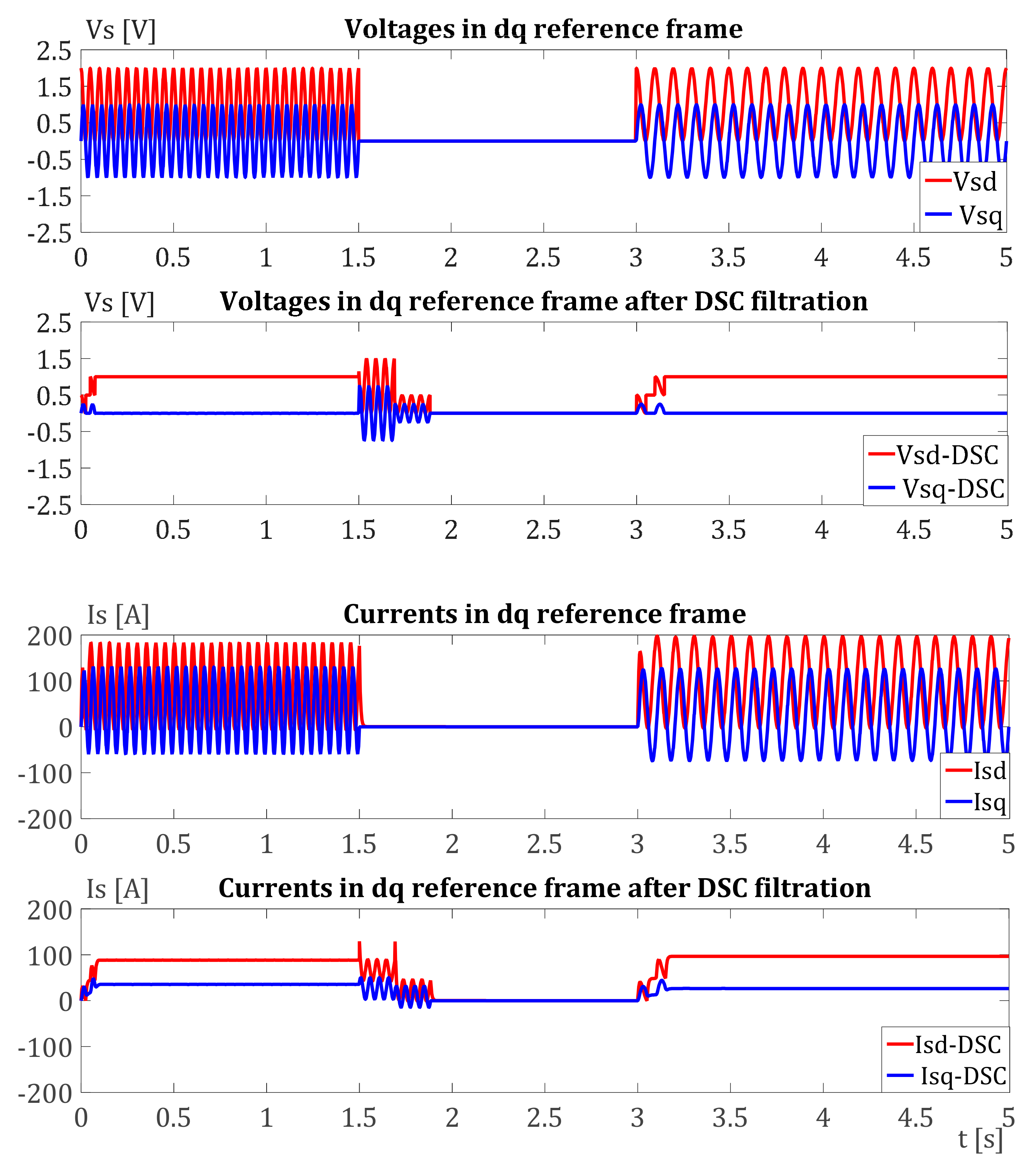
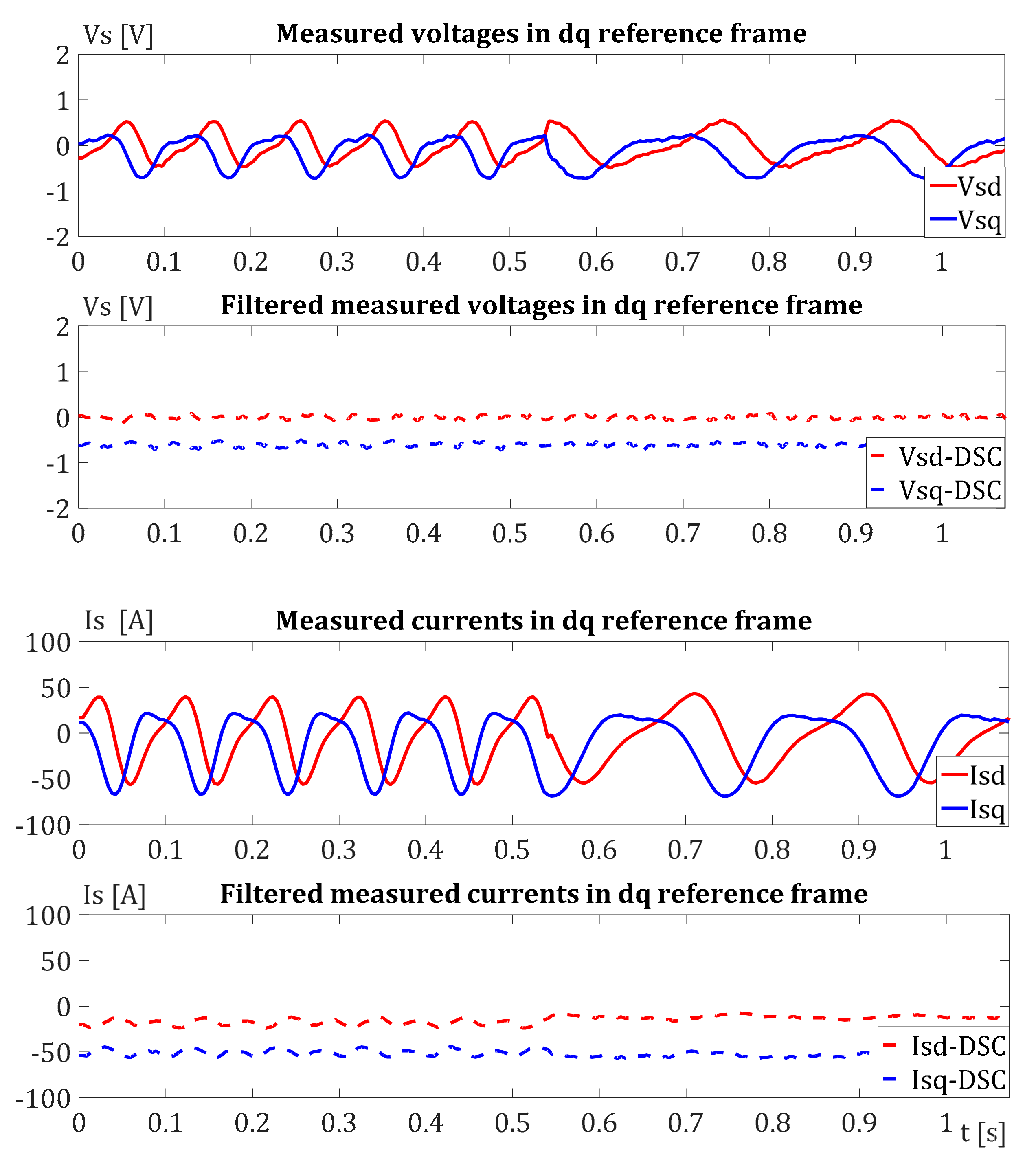
The proposed IM self-commissioning technique is verified first via computer simulations. The IM model is created in the Matlab/Simulink toolbox with parameters set according to the data obtained from the motor manufacturer. The IM model is excited with sinusoidal voltage test signals, with 2 V amplitude and with the DC offset added as suggested in
Section 3. The results of computer simulations with the frequency of voltage test signals set to 10 Hz and 5 Hz are shown in
Figure 2.
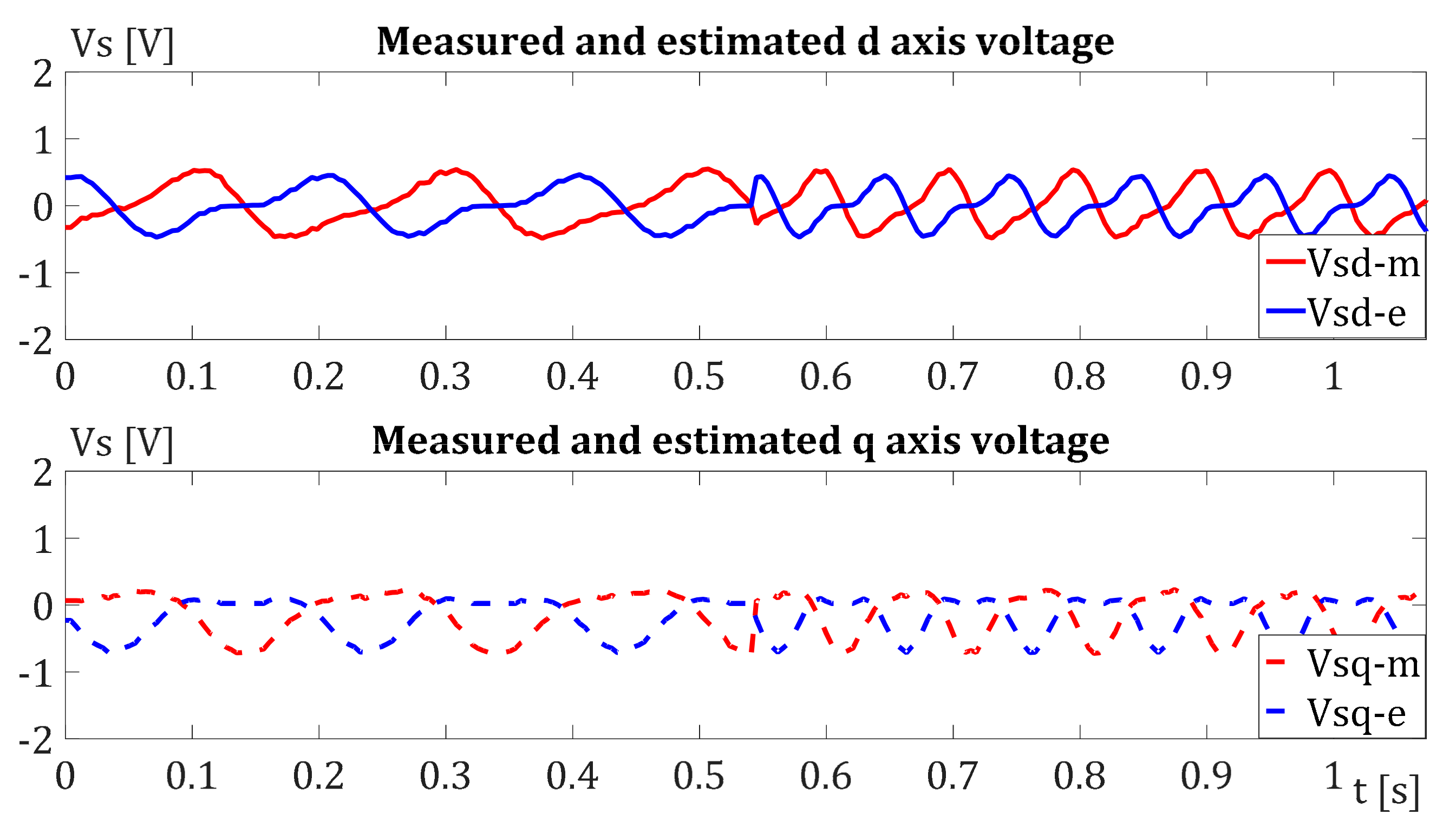
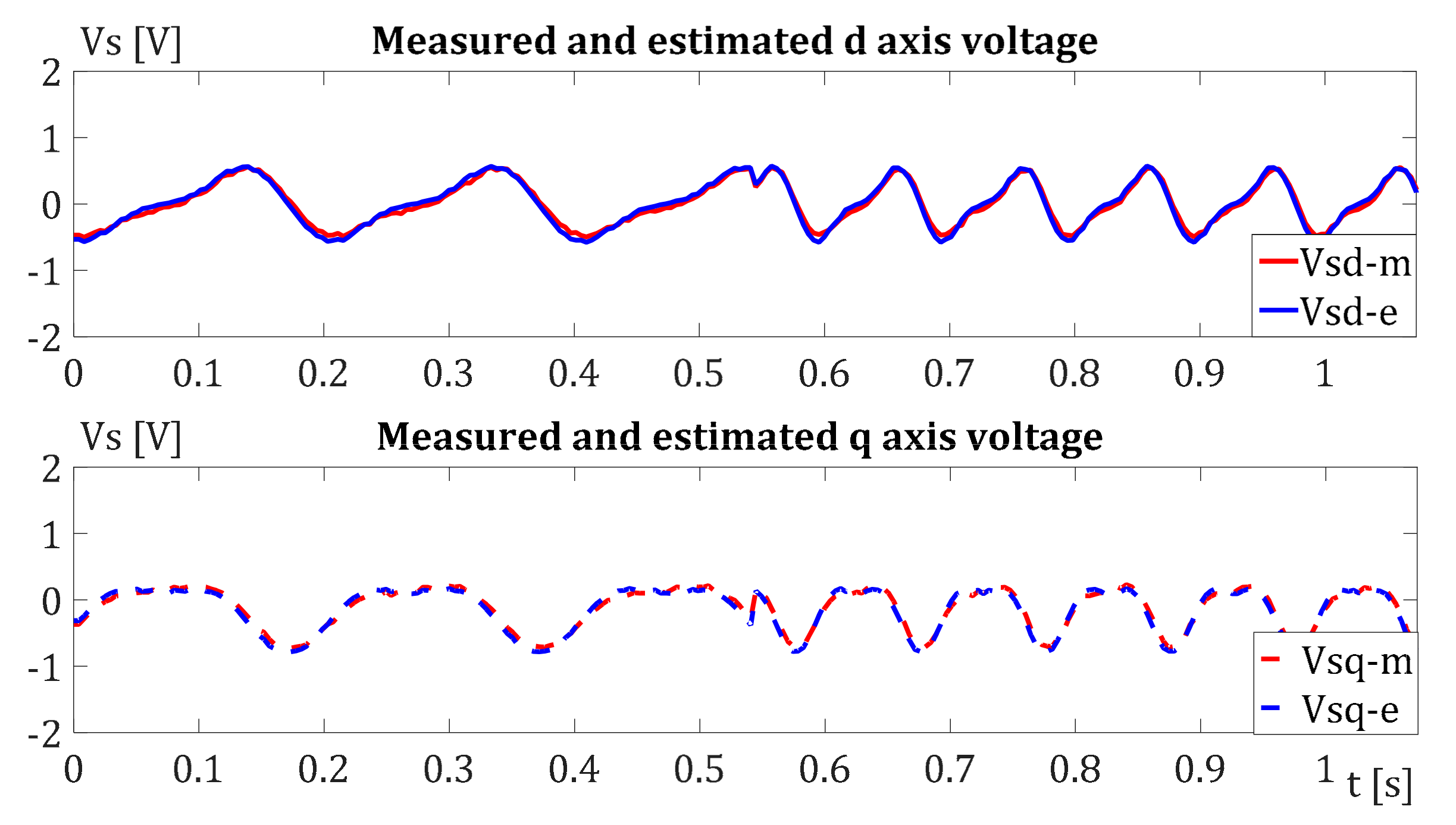
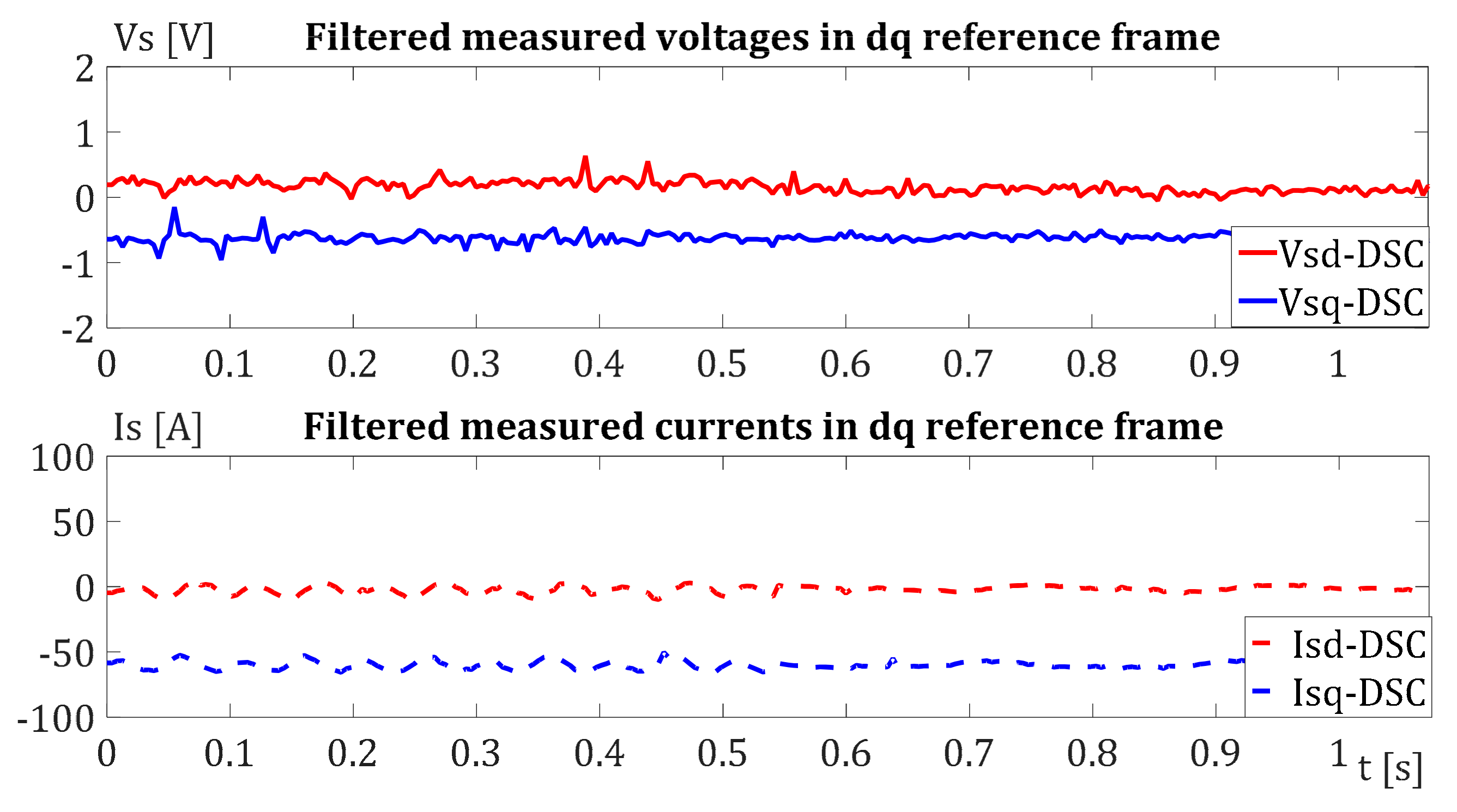
The upper two subplots in
Figure 2 present voltages in the
dq reference frame before and after the DSC filtration process, while the lower two subplots represent currents. From the waveforms of the filtered voltage and current after the transition between different test signals, the cascade DSC filters demonstrate an unstable response. The main reason for that is the fact that filters continue to add a phase-shifted signal to the original signal, which is repealed in a moment of 1.5 s.
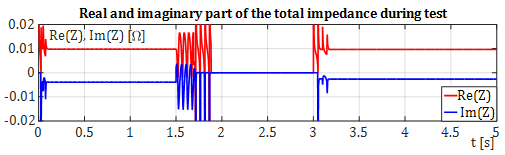
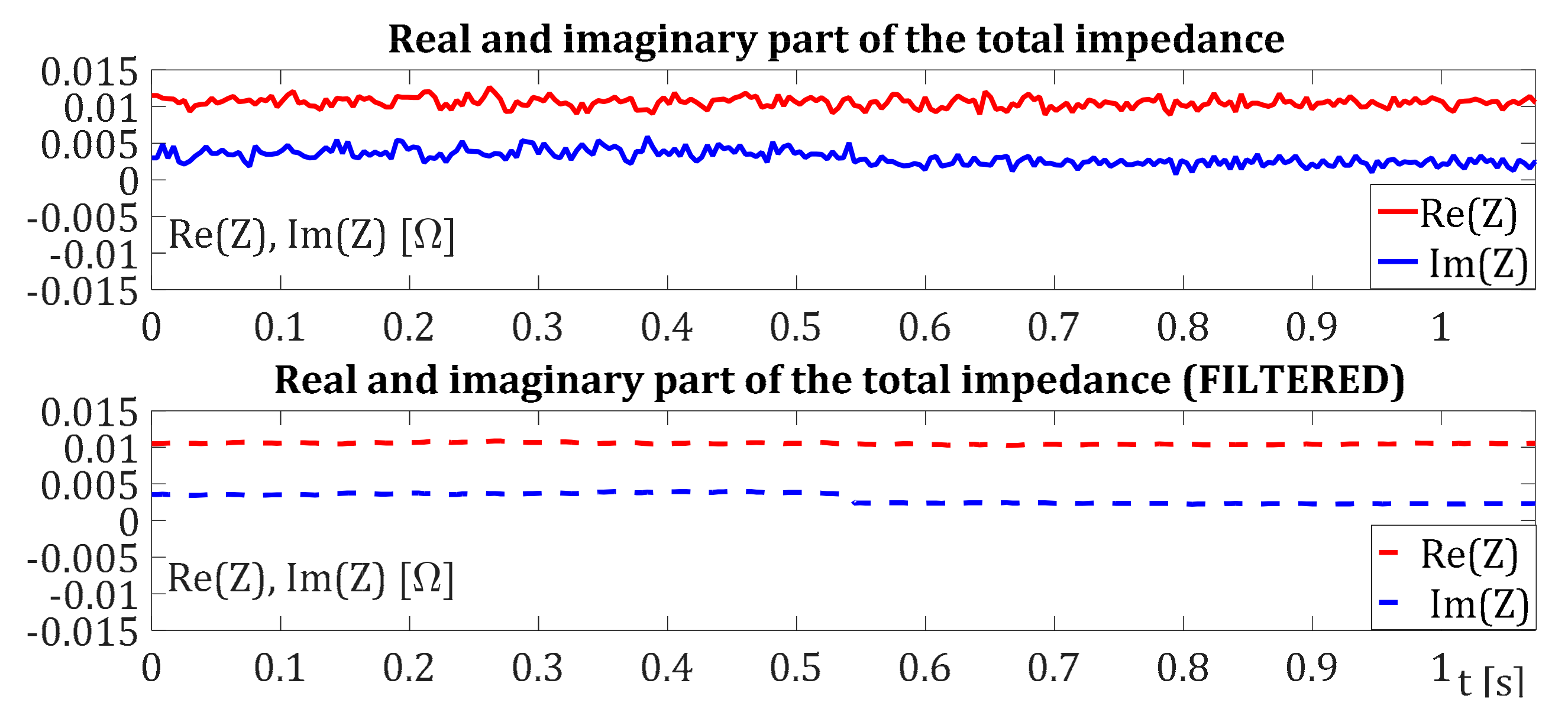
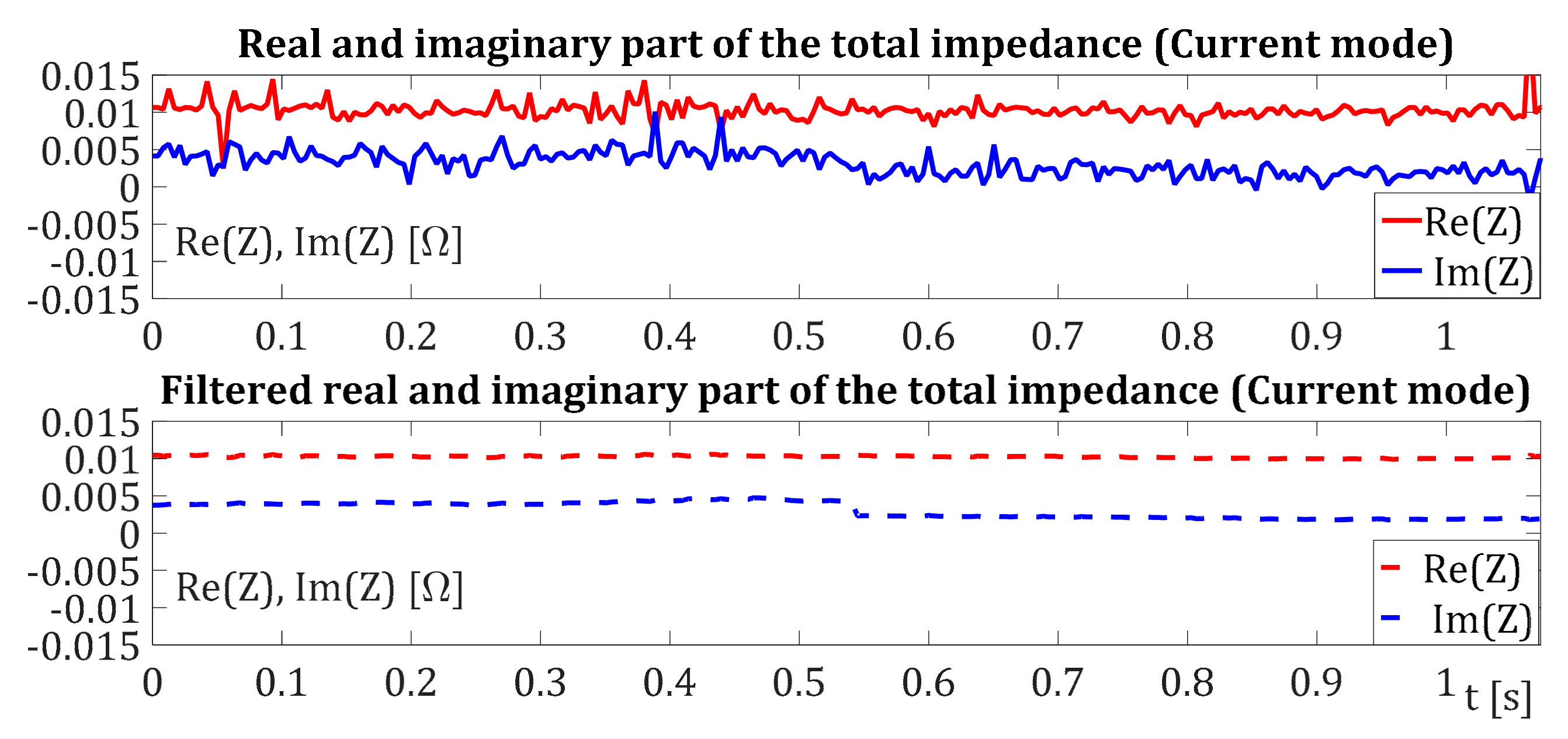
Using signals in
Figure 2 and Equations (16) and (17), the waveforms of the real and the imaginary part of IM impedance are created and presented in
Figure 3.
All parameters of the IM equivalent circuit, except stator resistance, are calculated in Matlab M-script file using steady-state samples of results shown in
Figure 3. After several simulations performed with different frequencies of test signals, three relevant parameters (
,
,
), are calculated and presented in
Table 2. The relative errors of calculated parameters with respect to parameters obtained from the manufacturer are also depicted in
Table 2.
The obtained results of computer simulations certainly encourage the implementation of the proposed self-commissioning technique on a real drive. However, it should be taken into consideration that errors of voltage measurements or estimations are not included in computer simulations. Therefore, in real drive application, the voltage signal error and IM inductance saturation effect have to be considered. The influence of those effects will be discussed in the next chapter, in which the application of this self-commissioning technique on the specific IM traction drive using a low voltage IM is considered.
6. Discussion
The proposed IM self-commissioning technique based on two sinusoidal voltage test signals represents a unique and direct approach for the calculation of all equivalent circuit parameters improved and adapted to the low voltage IM. This technique is very robust and efficient in the estimation of parameters of a series branch, though it is less precise in the estimation of magnetization inductance, especially for low voltage IM. The simulation results substantiated the proposed self-commissioning technique using sinusoidal voltage test signals with different frequencies. From experimental results it is verified that the cascade DSC filter configuration in combination with a simple heavy filter is a suitable tool for signal processing during this type of self-commissioning technique. Implementation of technique with sinusoidal voltage test signals instead of current test signals is recommended for the self-commissioning process of low voltage traction IM drive. Due to low voltage excitation during the test, the direct measurement of phase voltages is recommended for the implementation of the technique.
Although only low 48 V voltage IM is considered in this paper, the proposed method is also applicable to the industrial IM drives of a conventional voltage level (400 V, 660 V, 6.6 kV…). For comparison purposes, the conventional IM drive with the parameters presented in [
8] is considered. Numerical identifiers used within the comparative analysis are
and
, with the physical interpretation of characteristic angular frequencies. The first one represents the frequency which, applied on IM, provides the impedance balance of magnetizing and rotor branches, while the second one implies the adjustment of optimal power factor in short circuit test [
1]. For both, low voltage IM with parameters from
Table 3 and standard IM presented in [
8], numerical identifiers are of the same order of magnitude, implicating the robustness and universality of calculation procedure (Equations (10)–(12)). However, if this technique is applied on conventional IM, it would not suffer from the influences of inverter nonlinearities and voltage drops on switching components, which were disregarded within the previous analysis. This is contrary to the case study presented in this paper, which requires more careful signal processing. This includes compensation of voltage drops through the utilization of measured terminal variables (phase voltages and currents), non-linearity suppression by imposing DC offset signals and DSC filtering mechanism for the precise harmonic attenuation, all implemented to deal with the method implementation on particular low voltage IM.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}