
An Immersed Boundary Method Based Improved Divergence-Free-Condition Compensated Coupled Framework for Solving the Flow–Particle Interactions


Abstract
1. Introduction
2. Governing Equations
2.1. Incompressible Navier–Stokes Equations
2.2. Equations of Motion for Solid Particle
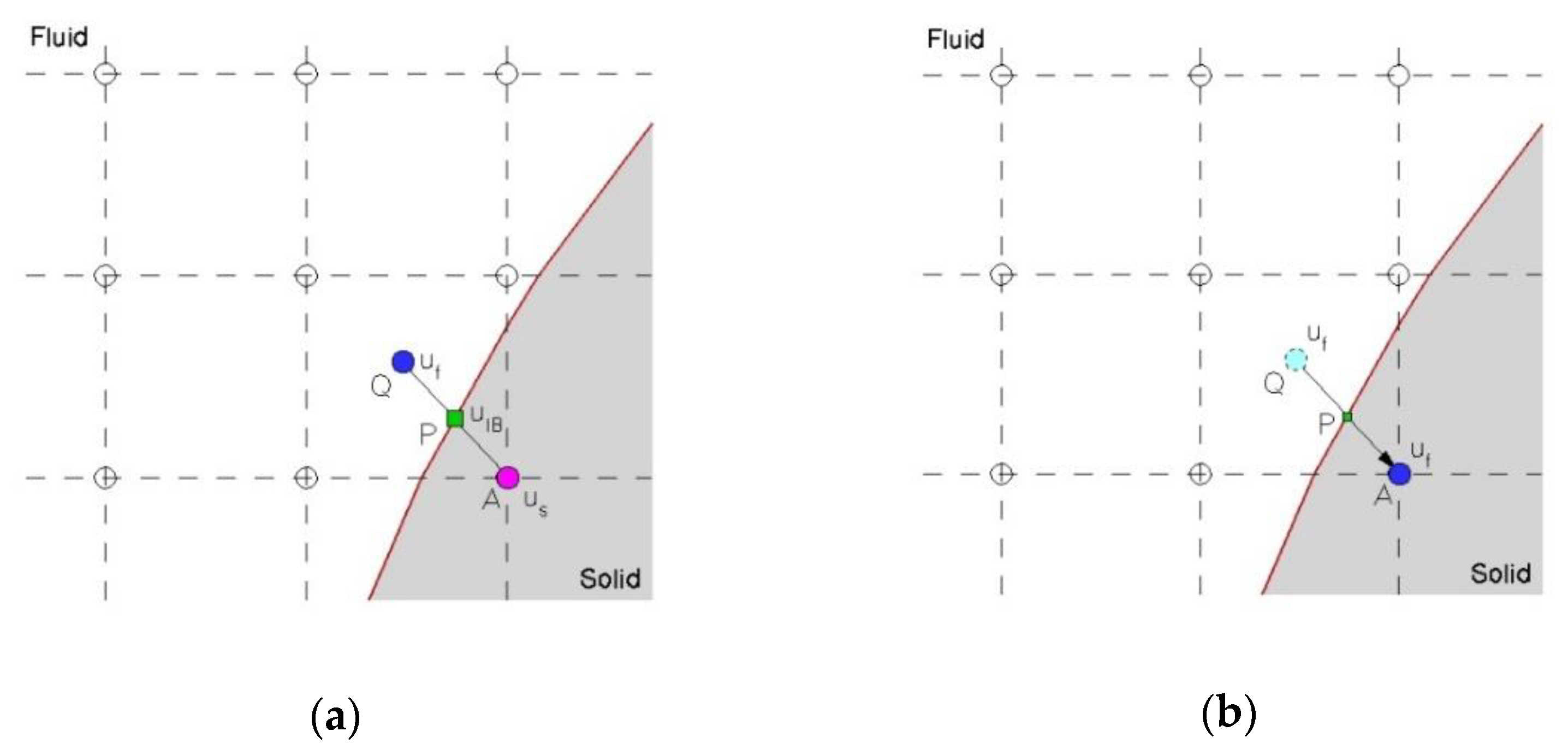
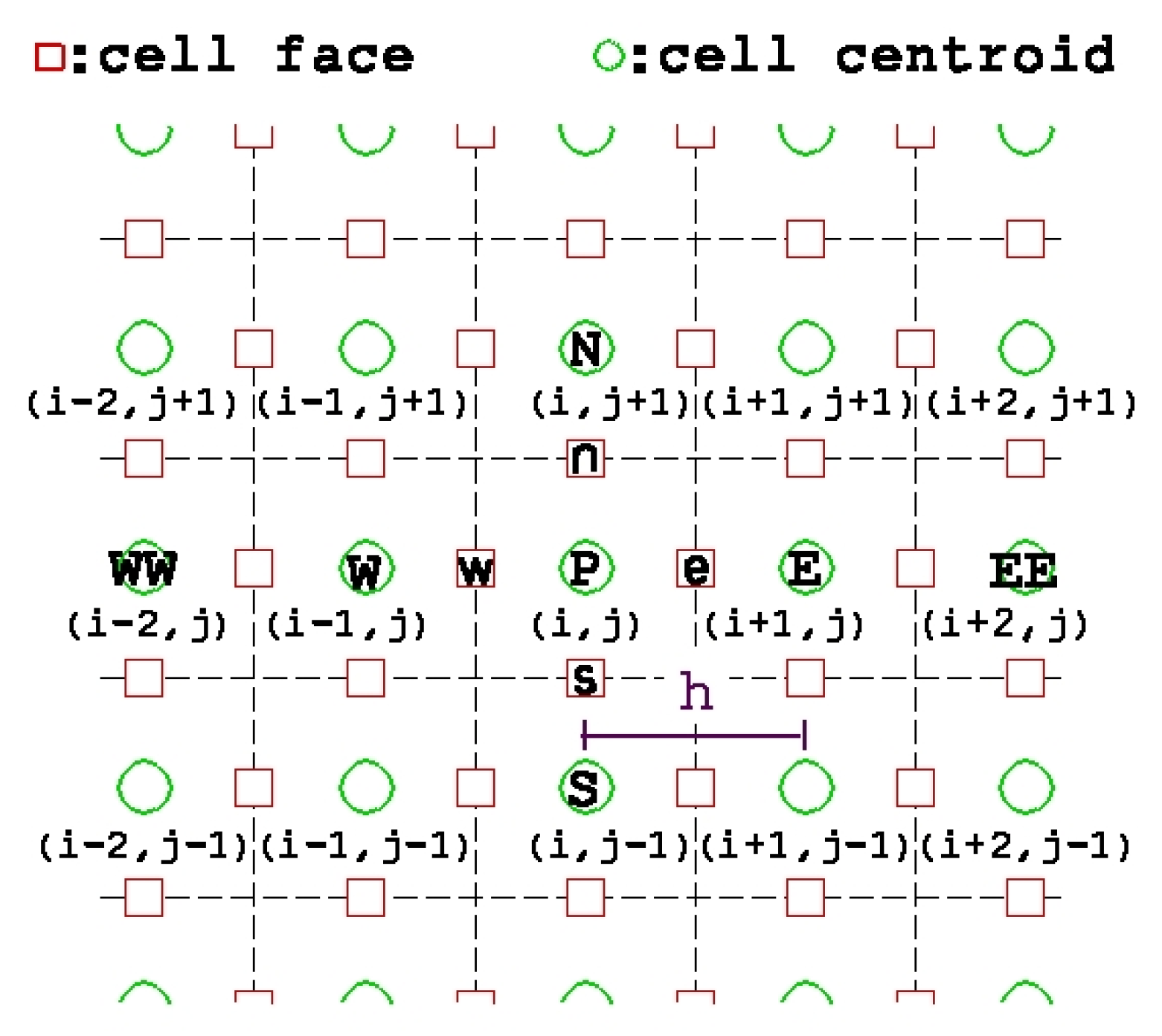
3. Differentially Interpolated Direct Forcing Immersed Boundary (DIIB) Method
3.1. Evaluation of Drag and Lift Forces
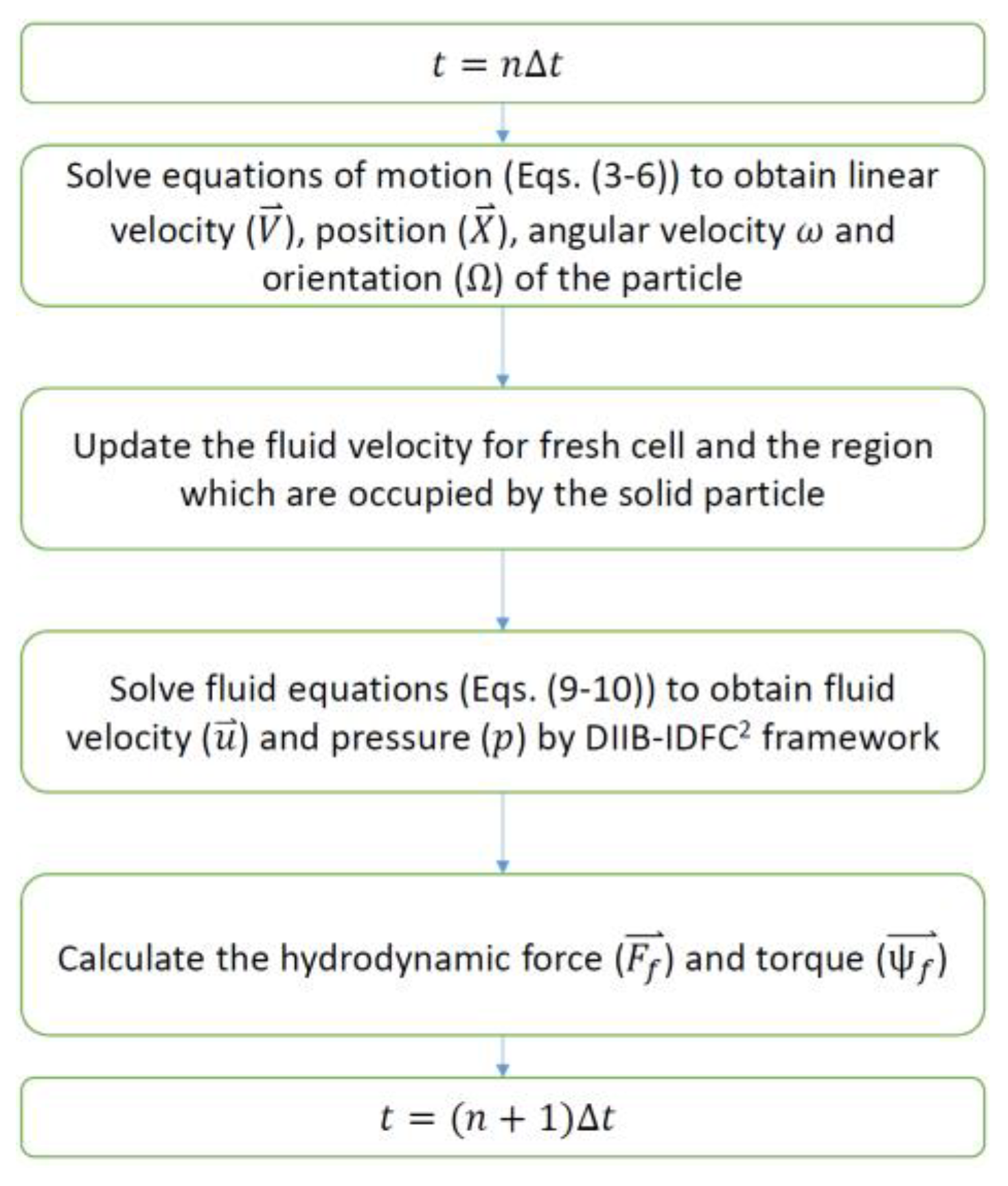
4. Improved Divergence-Free-Condition Compensated Coupled (IDFC2) Framework
4.1. Derivation of IDFC Framework
4.2. Derivation of IDFC2 Framework
5. Results
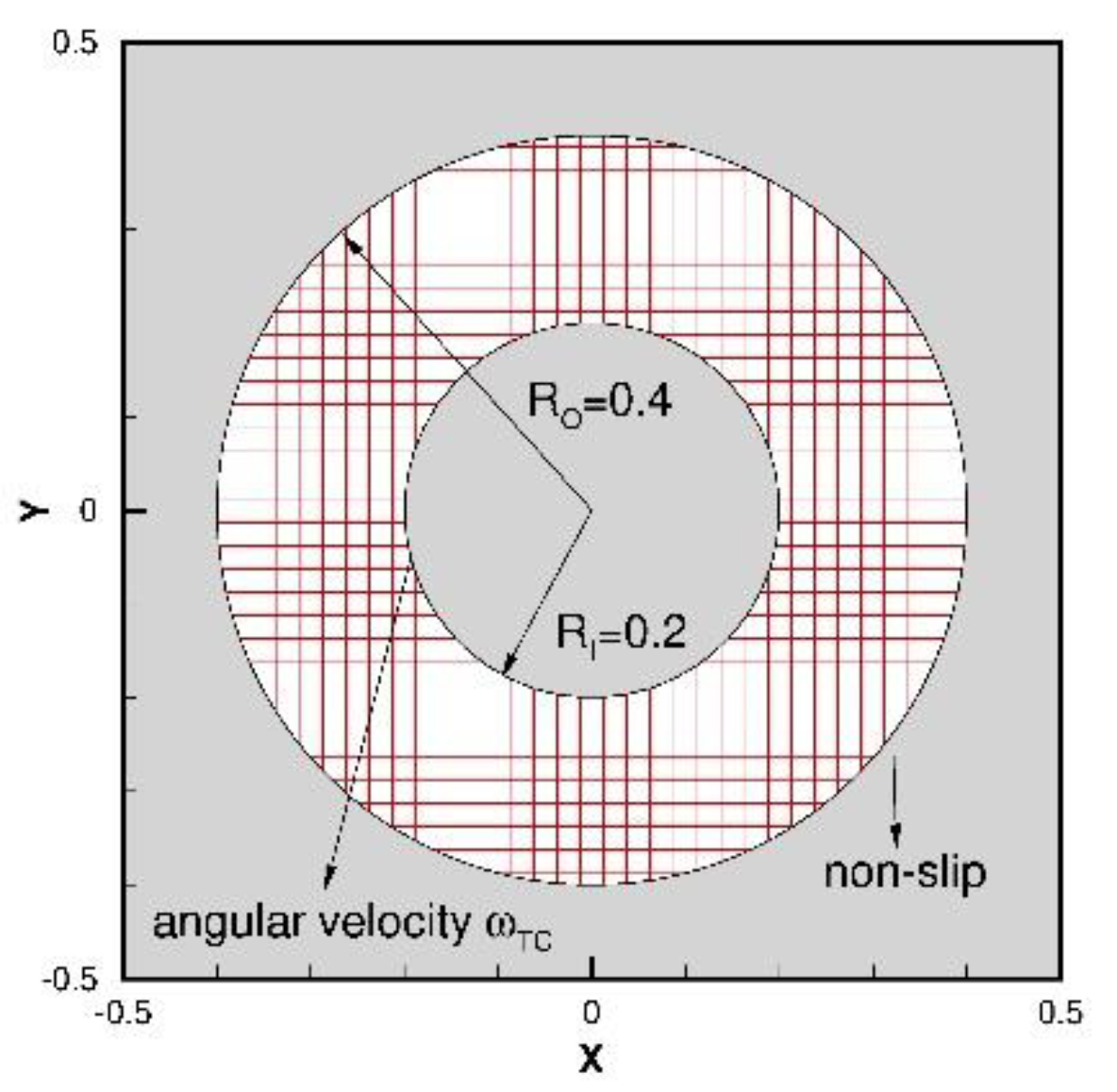
5.1. Taylor-Couette Flow
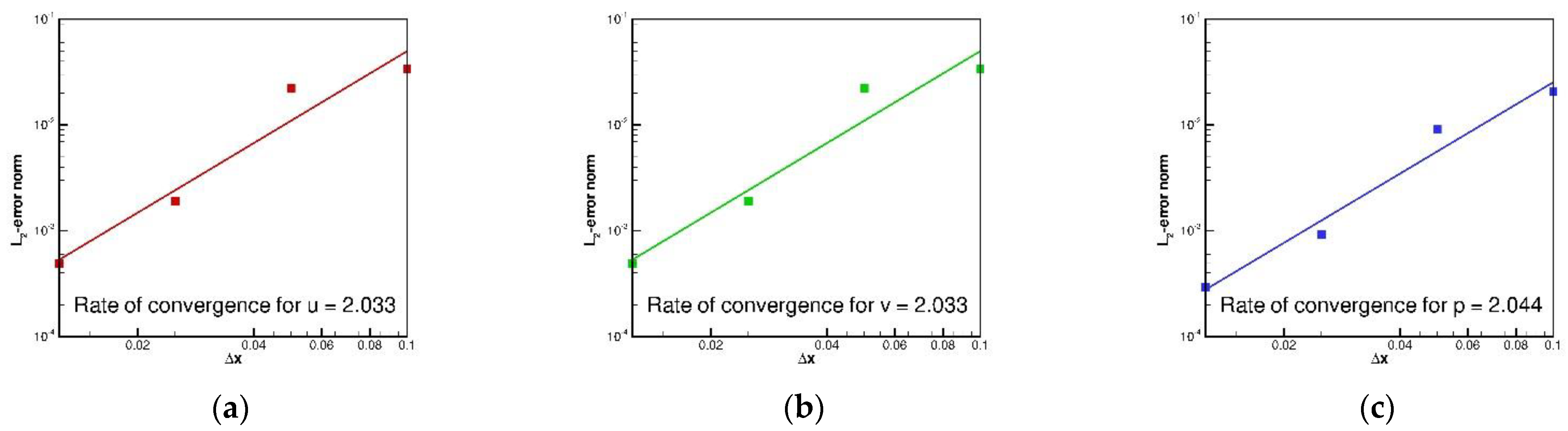
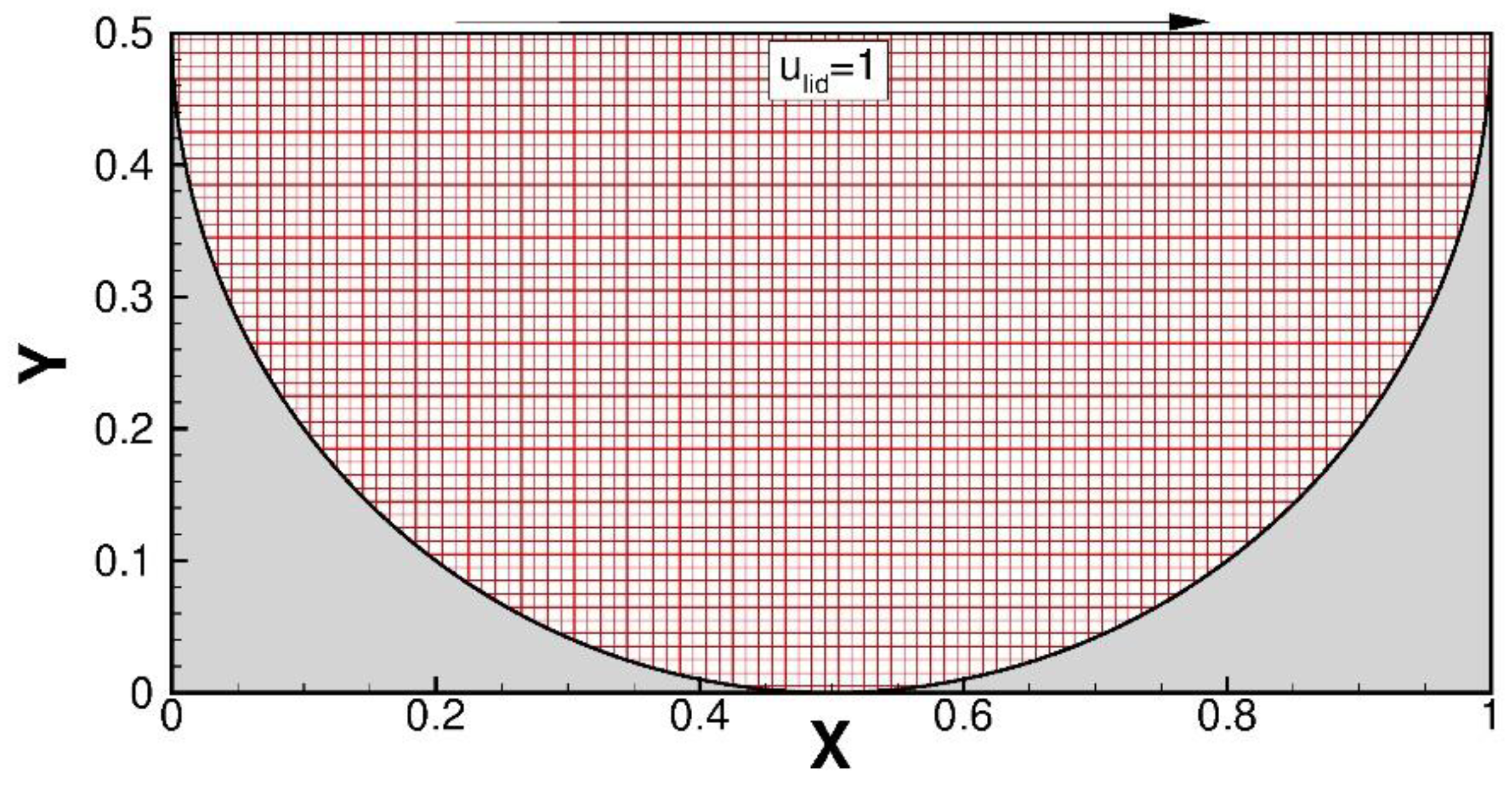
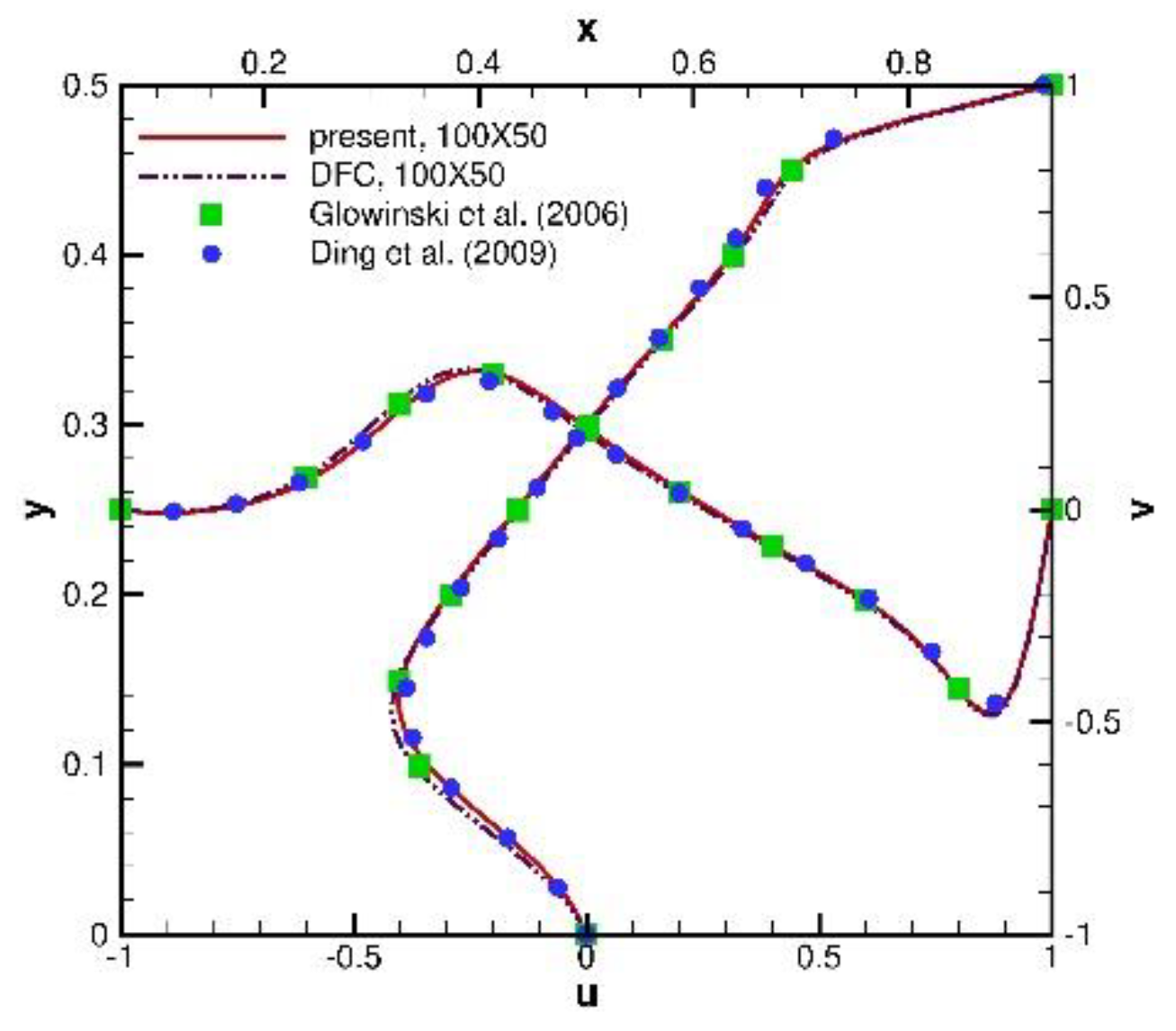
5.2. Lid-Driven Semi-Circular Cavity Flow
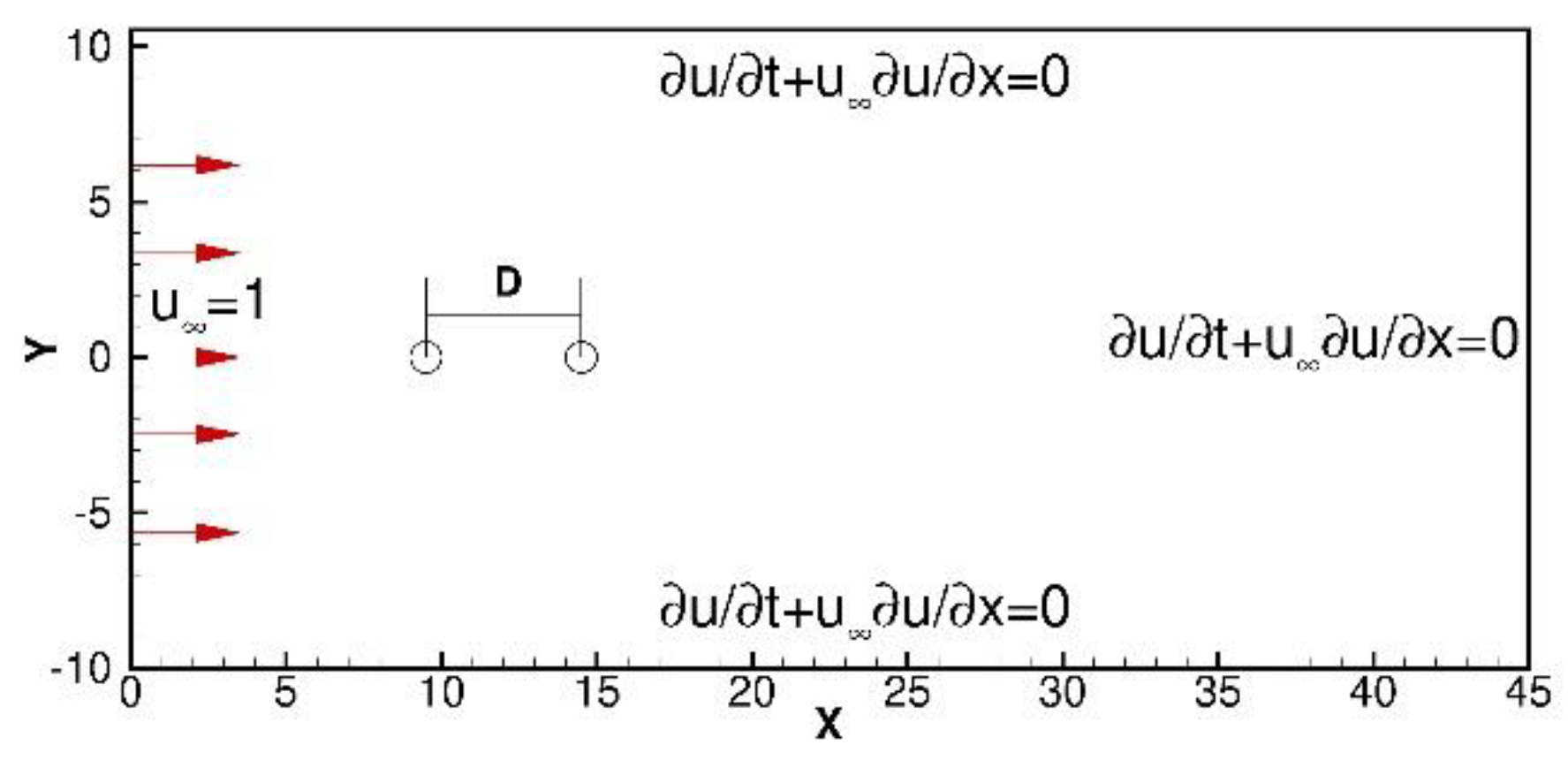
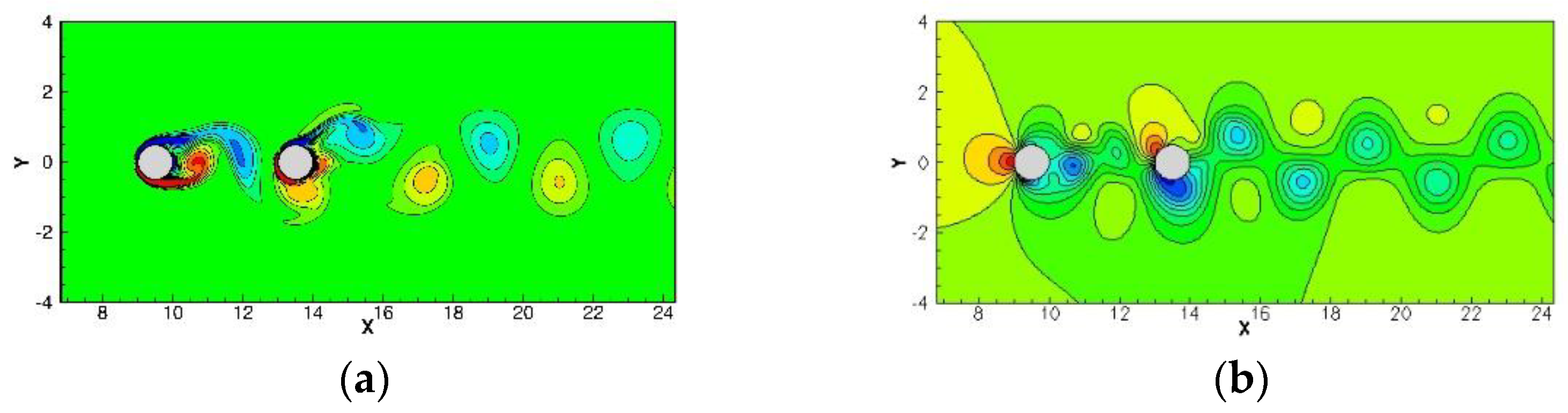
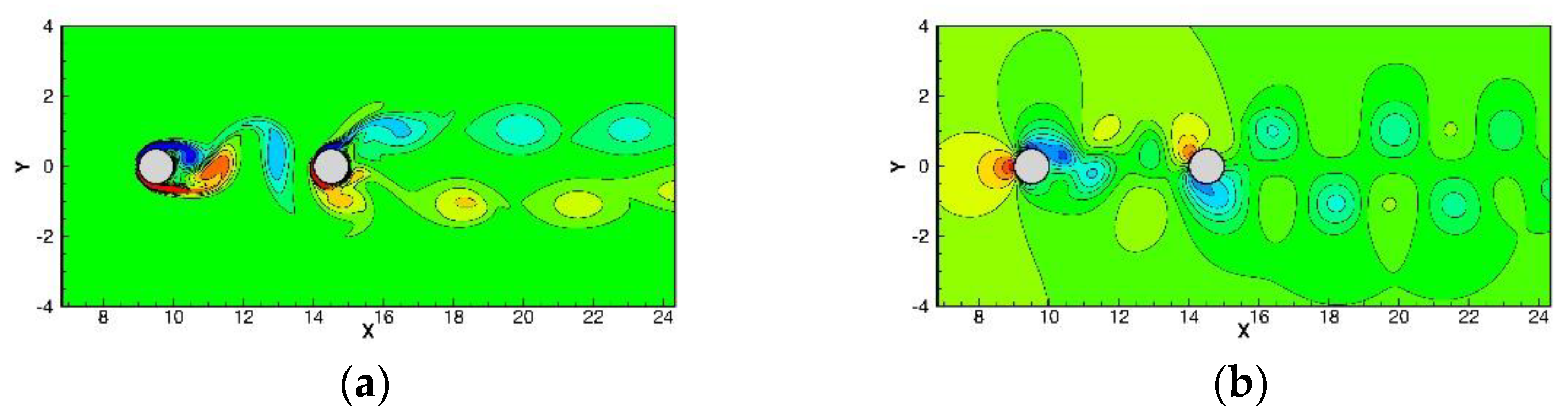
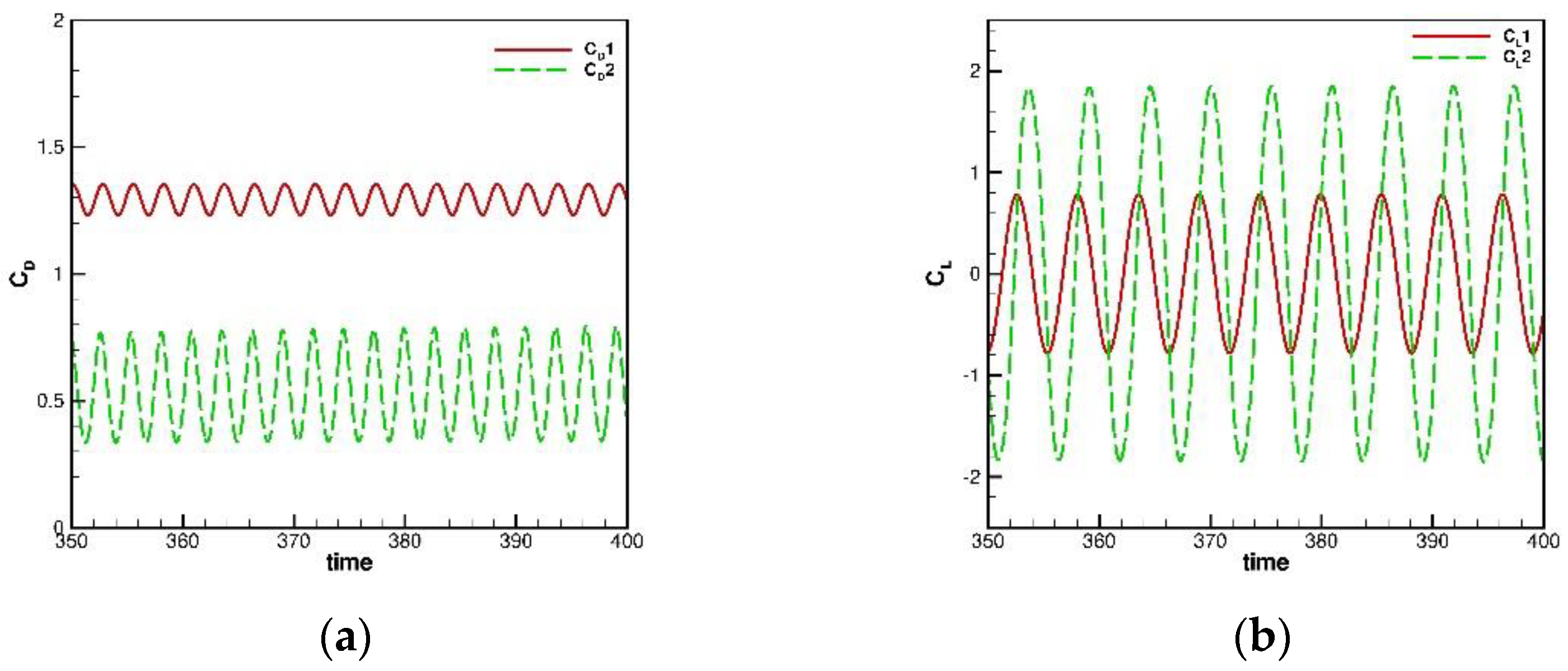
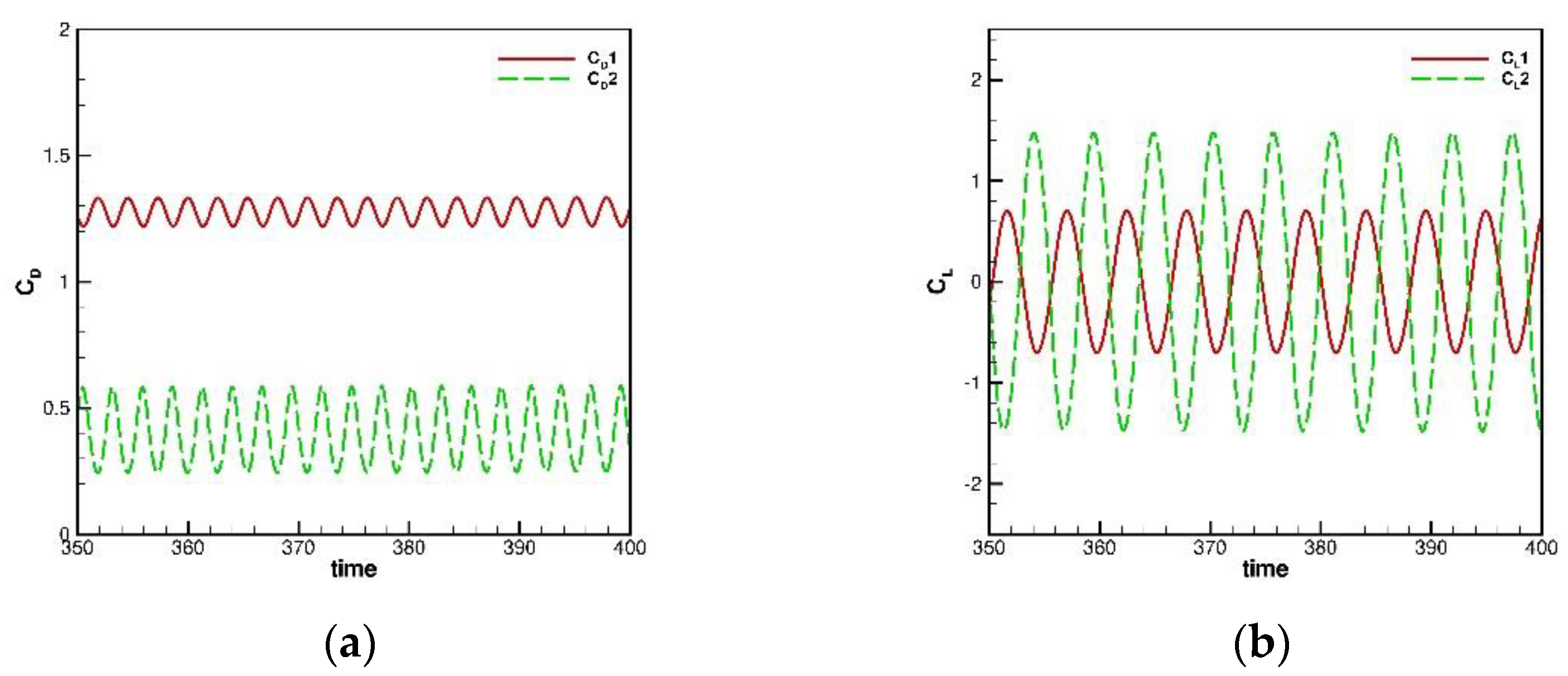
5.3. Flow Past Circular Cylinders in Tandem
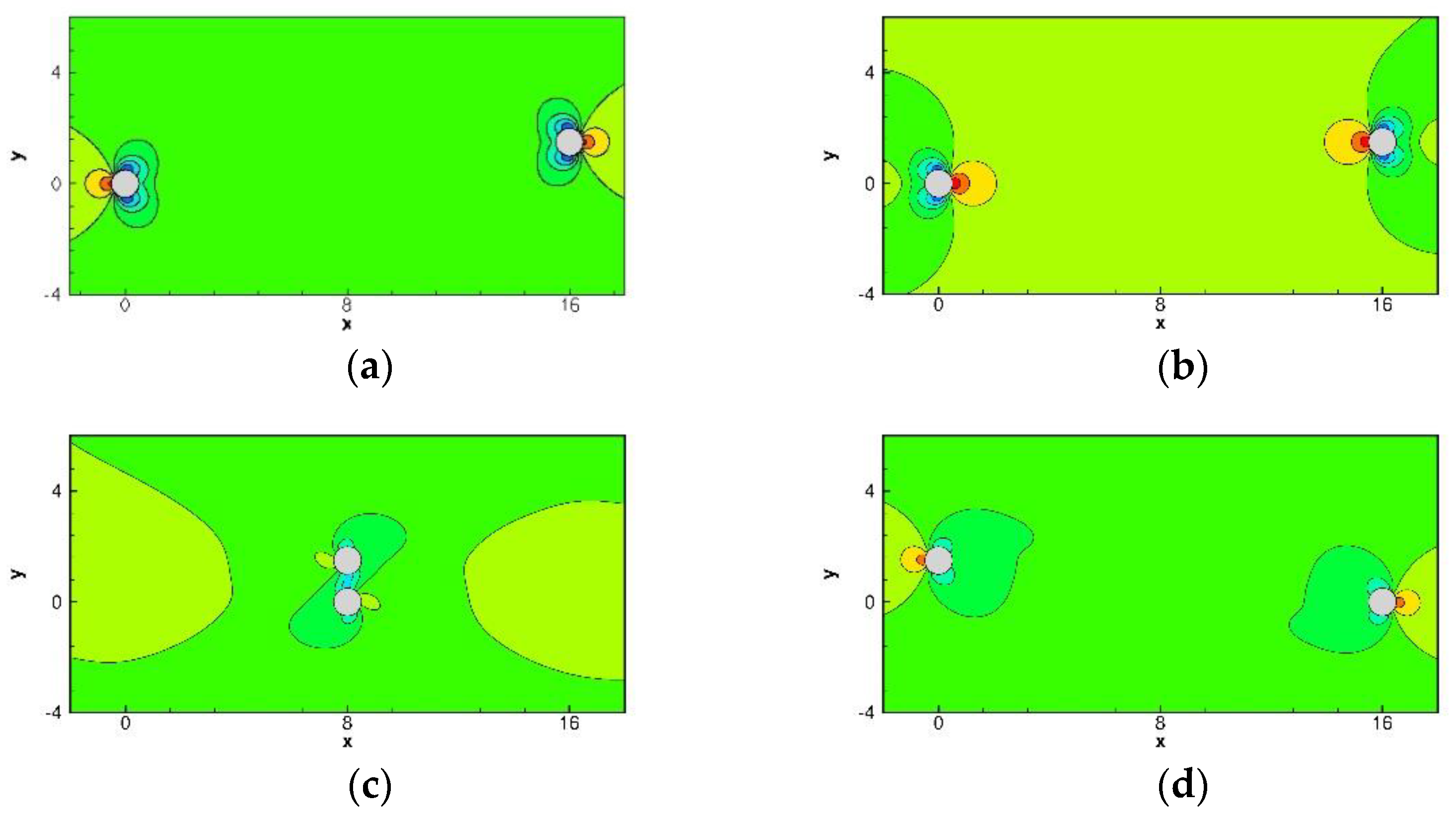
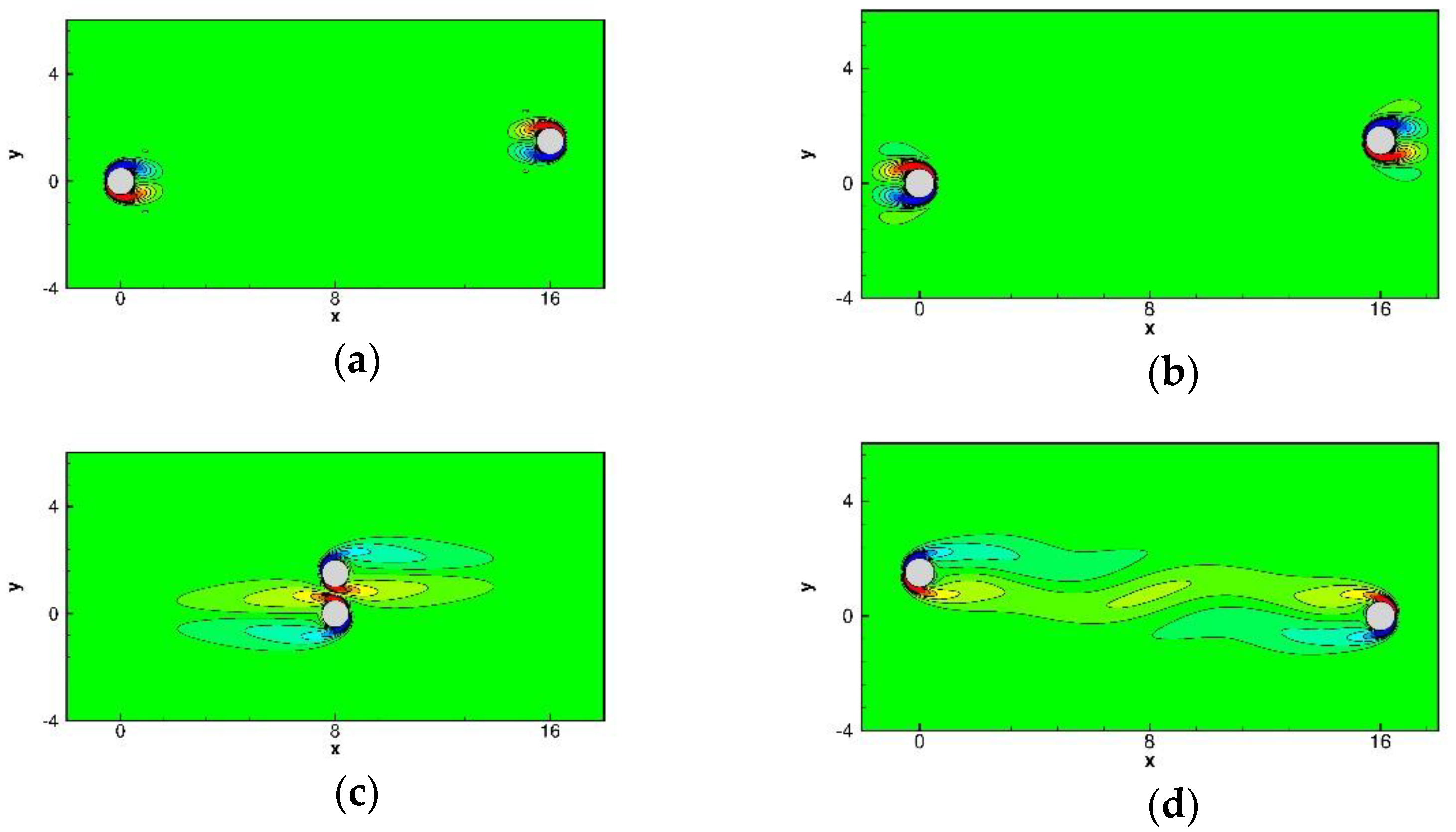
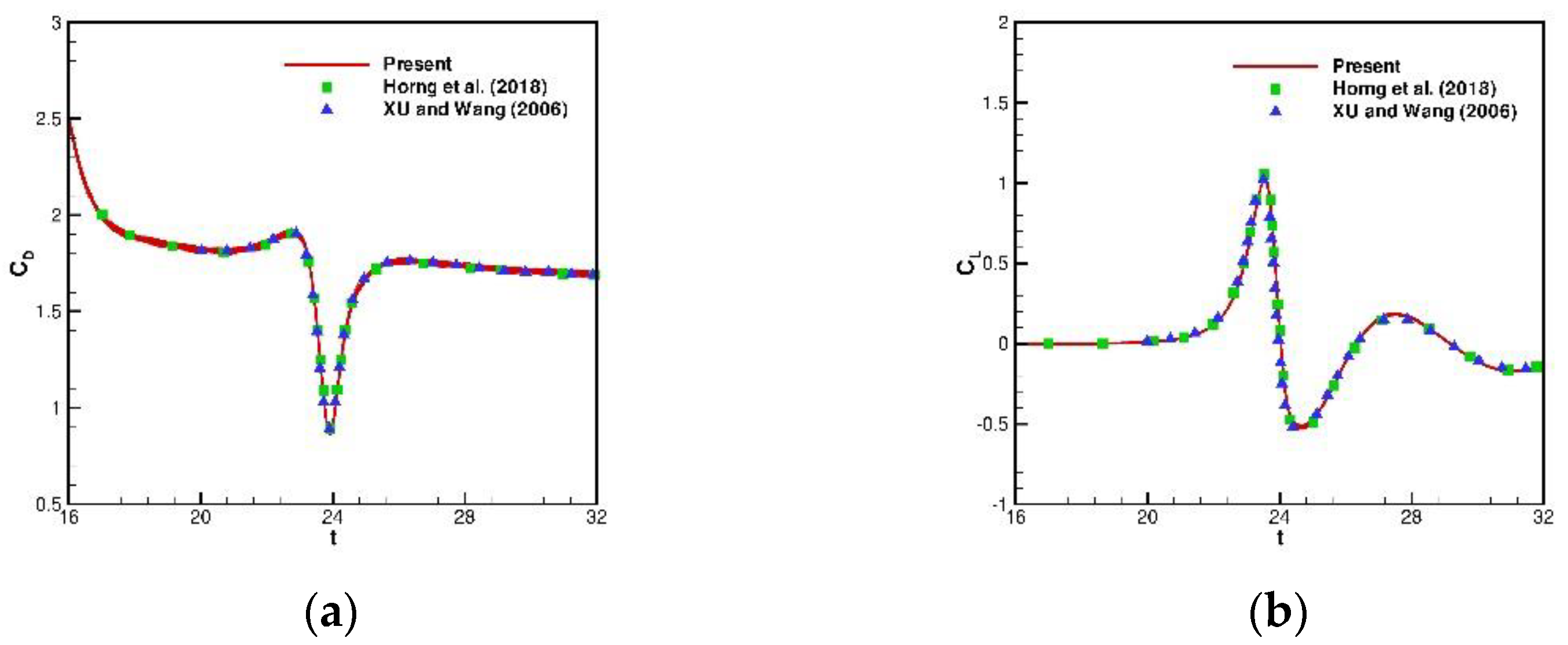
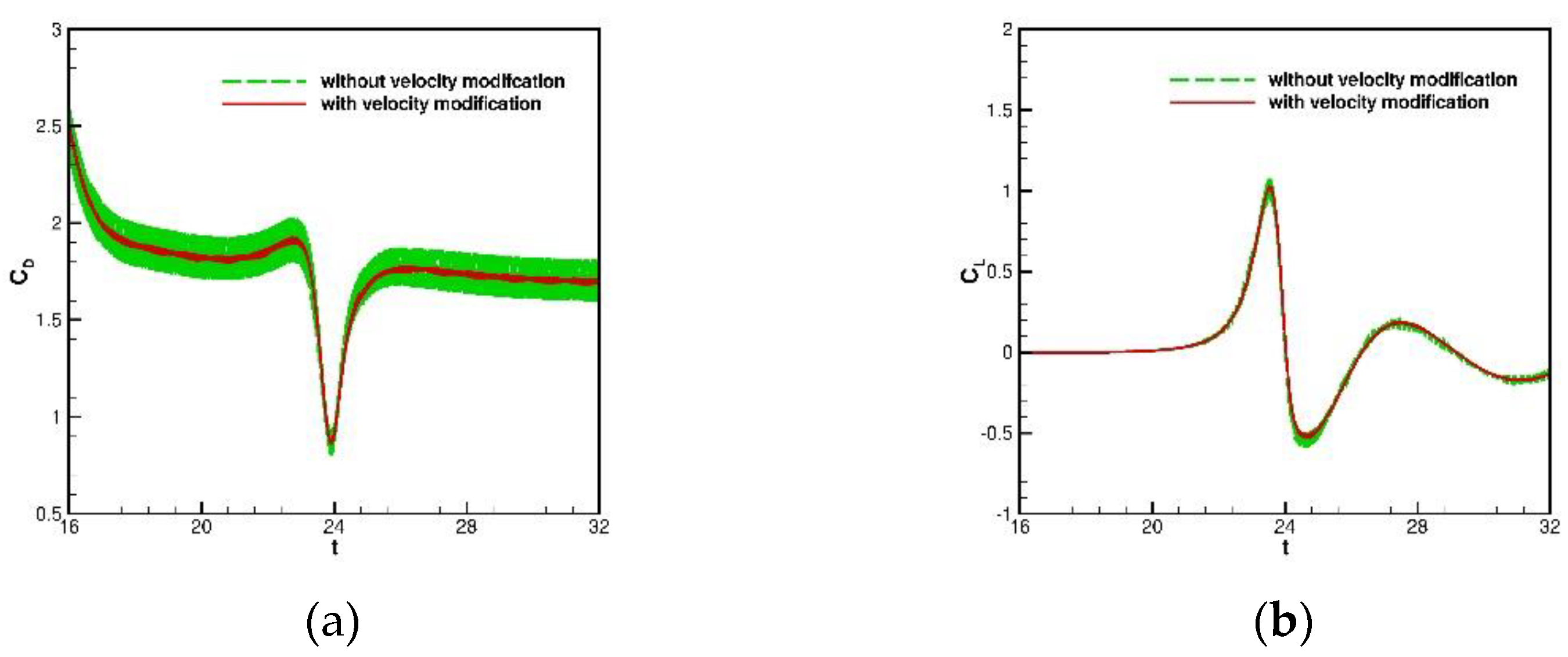
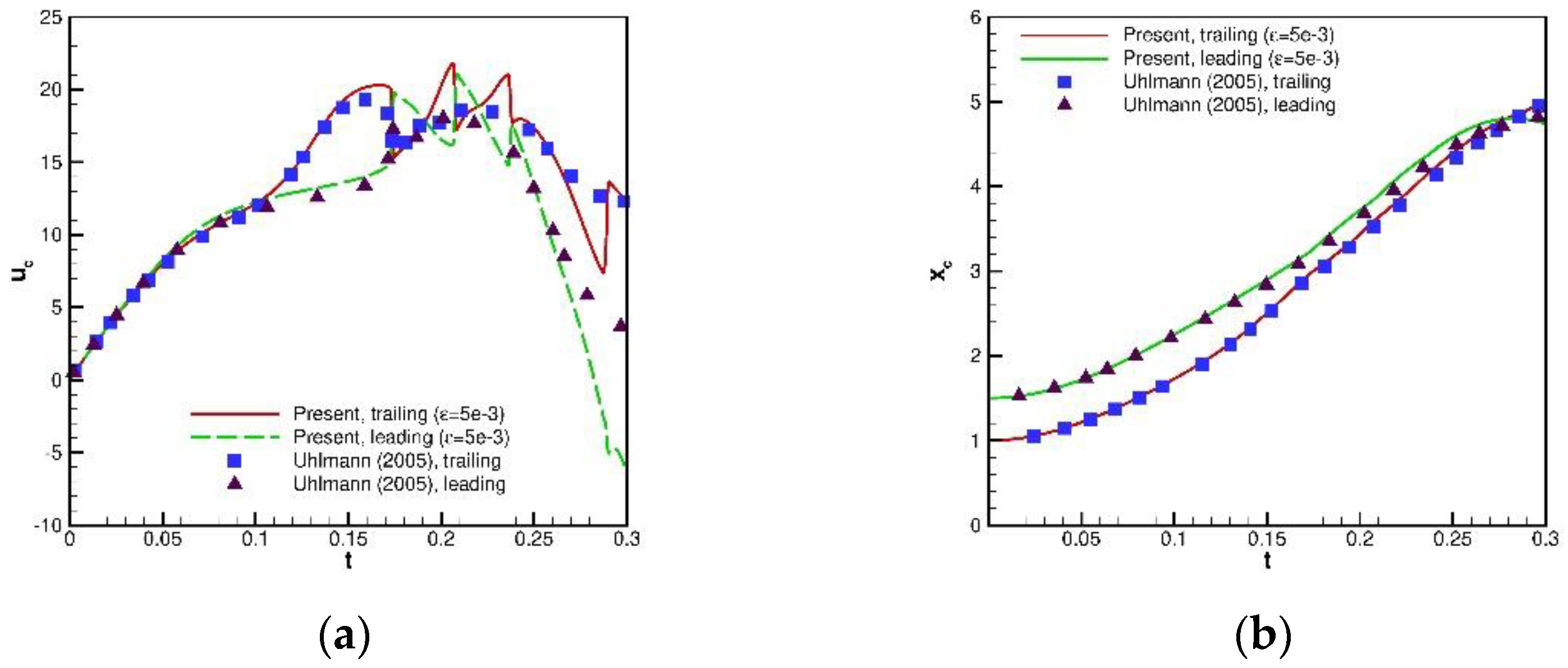
5.4. Two Circular Cylinders Moving towards Each Other in Quiescent Flow
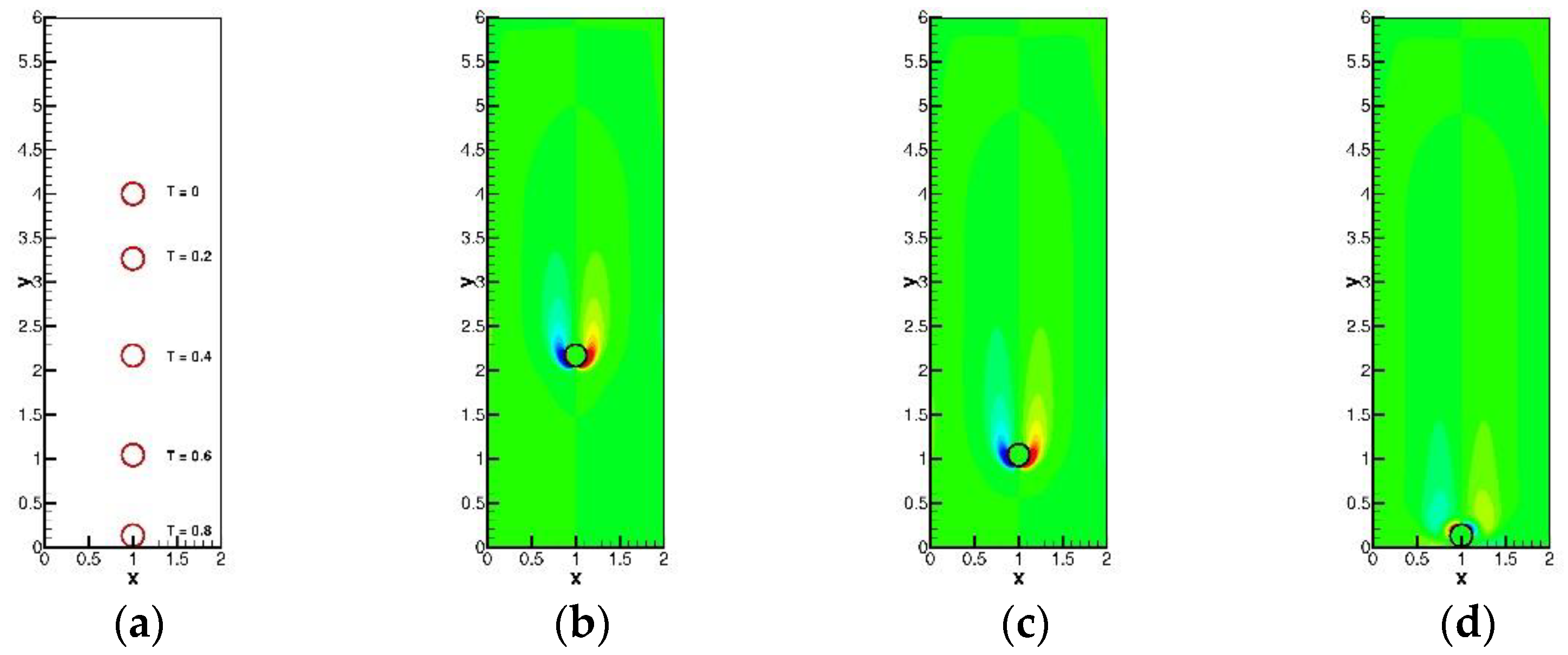
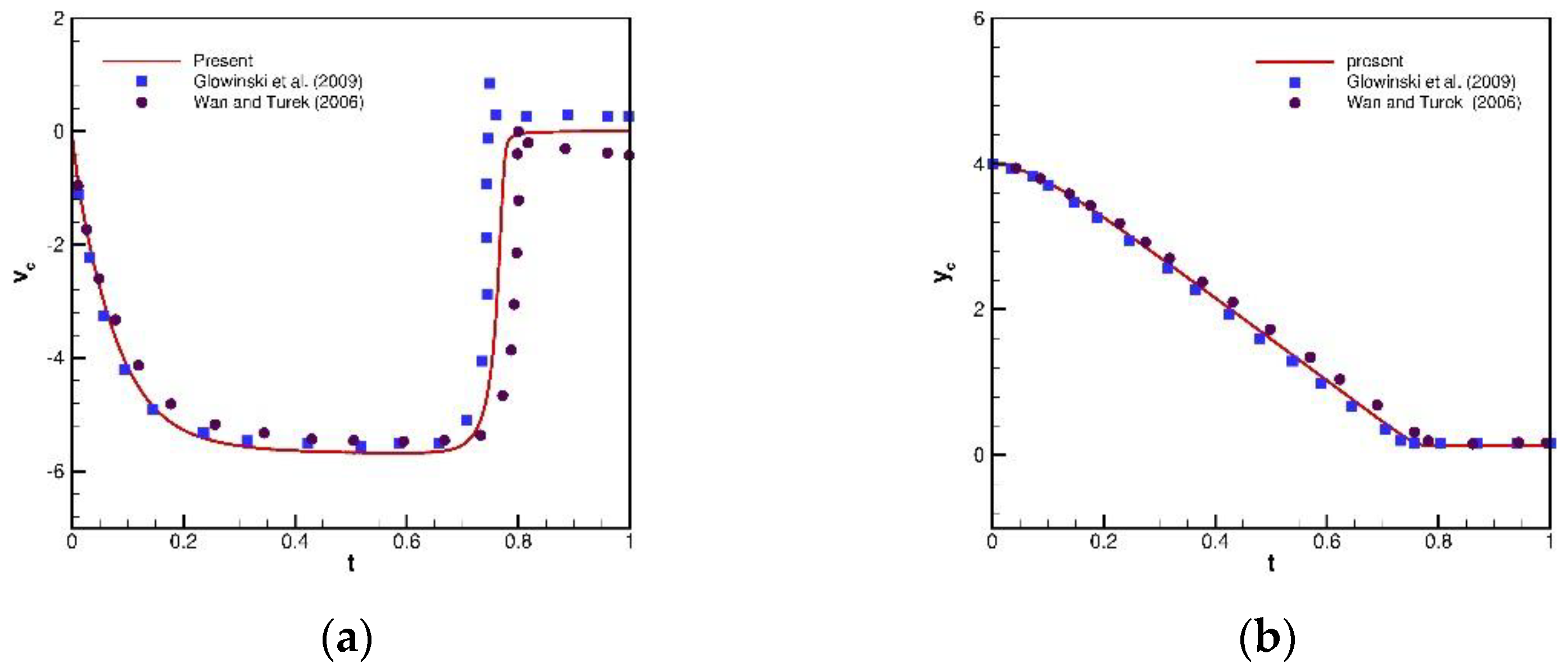
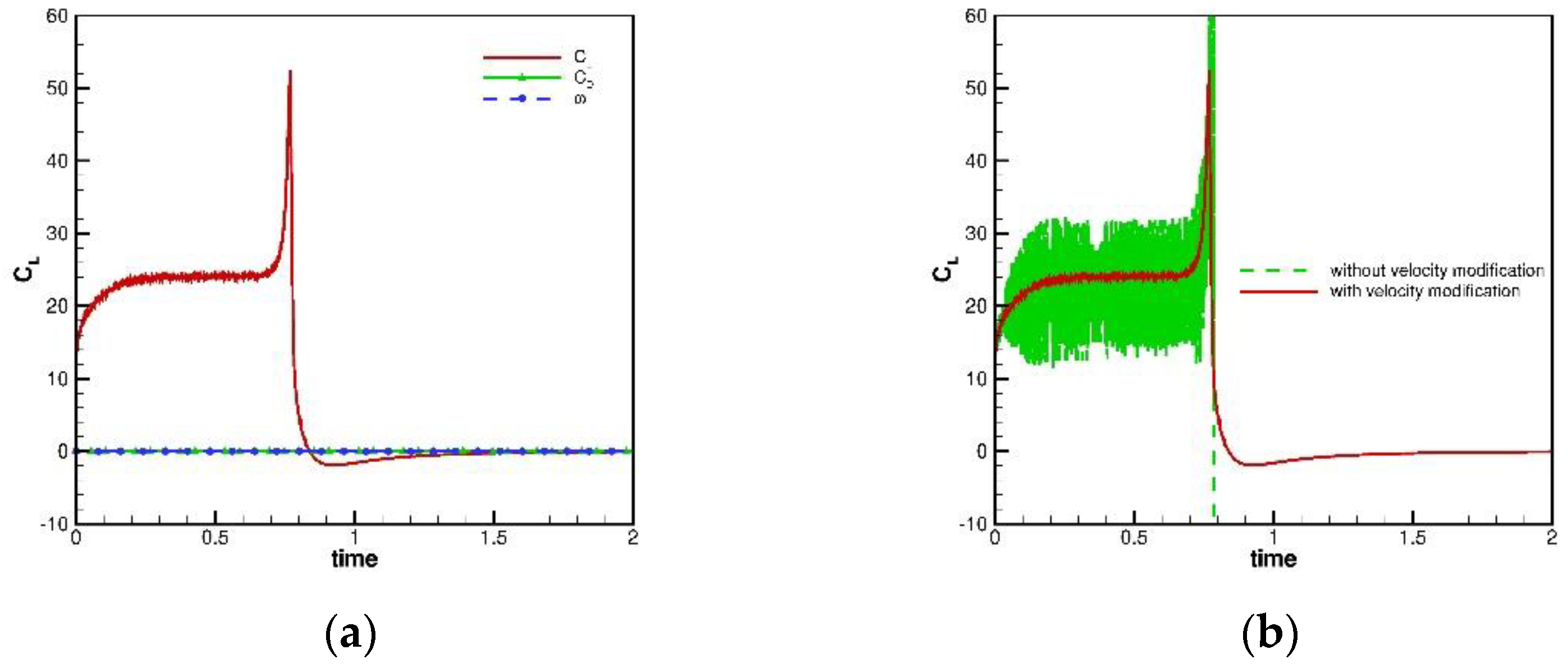
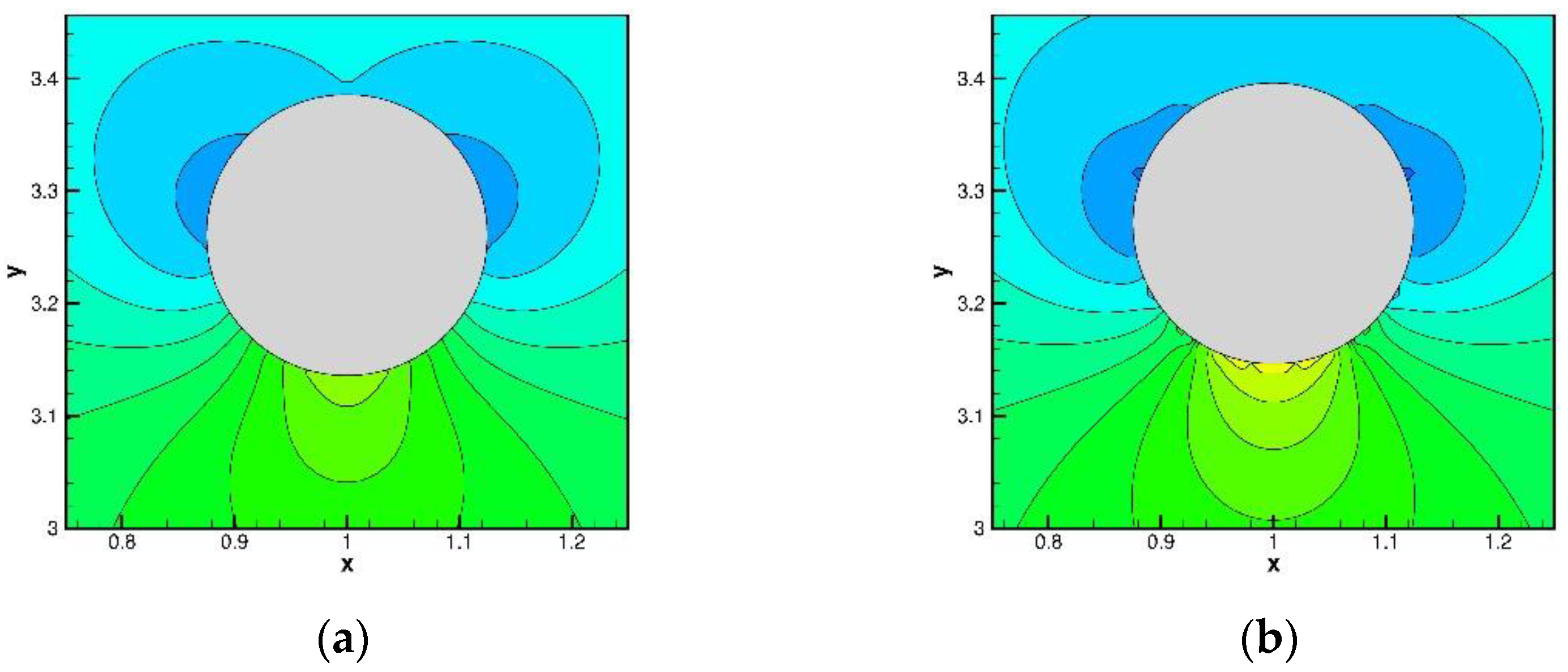
5.5. Free-Falling Circular Cylinder in Quiescent Flow
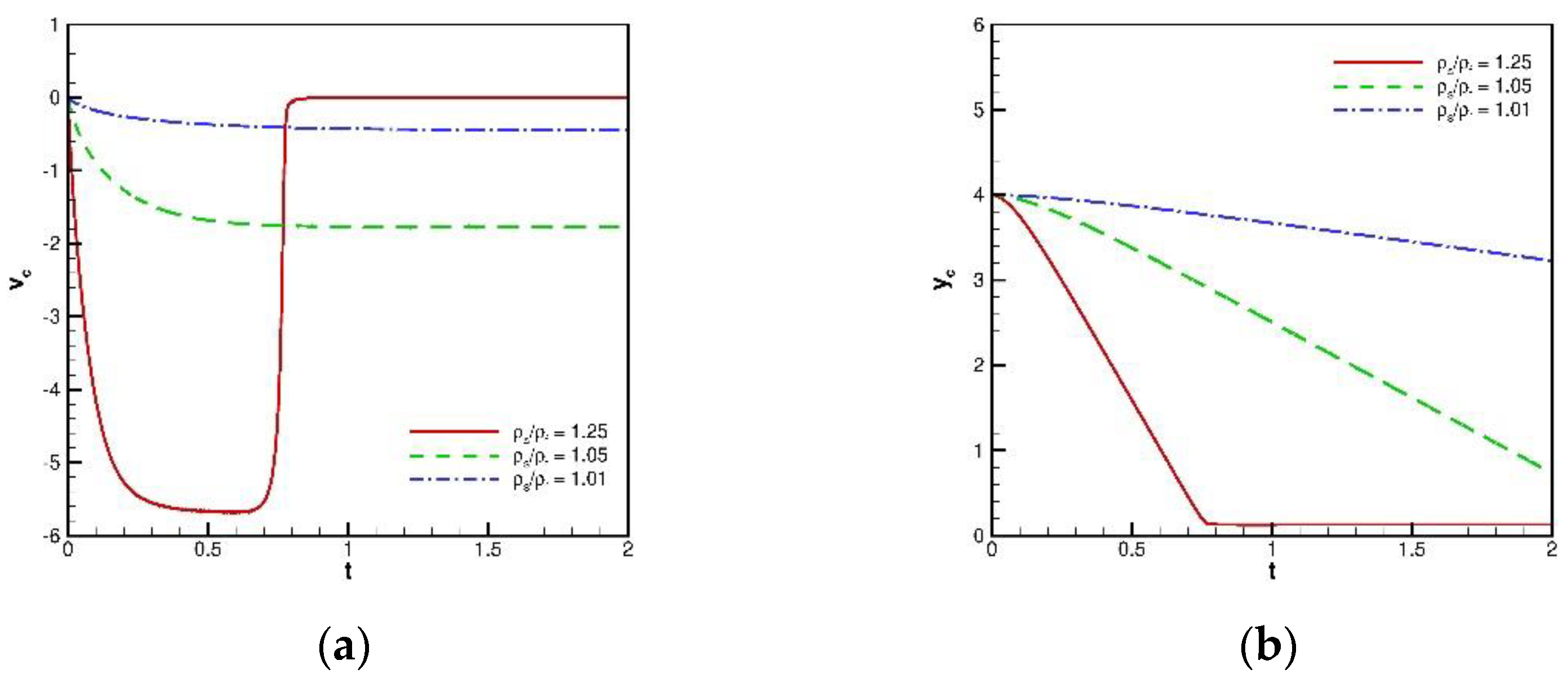
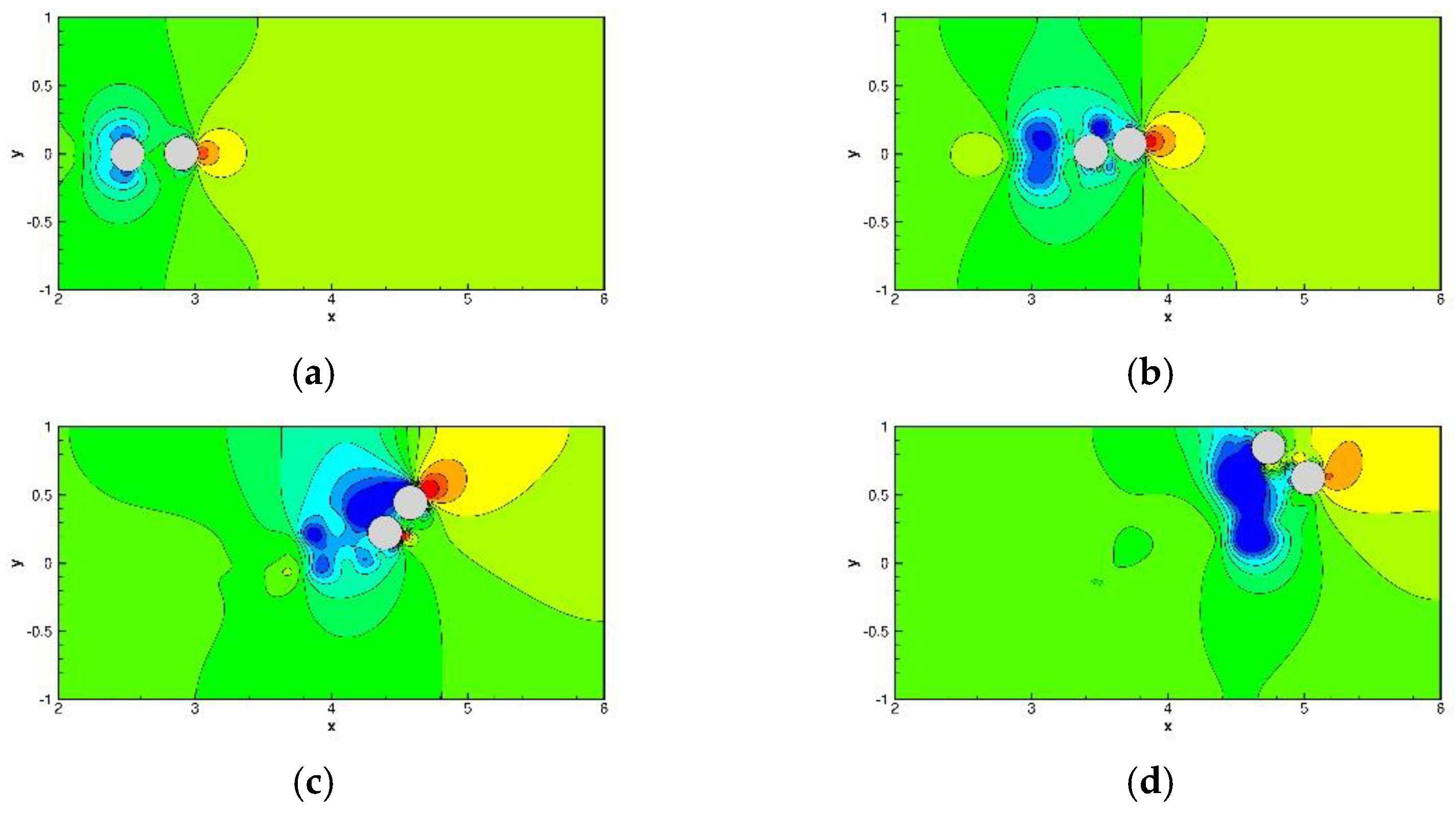
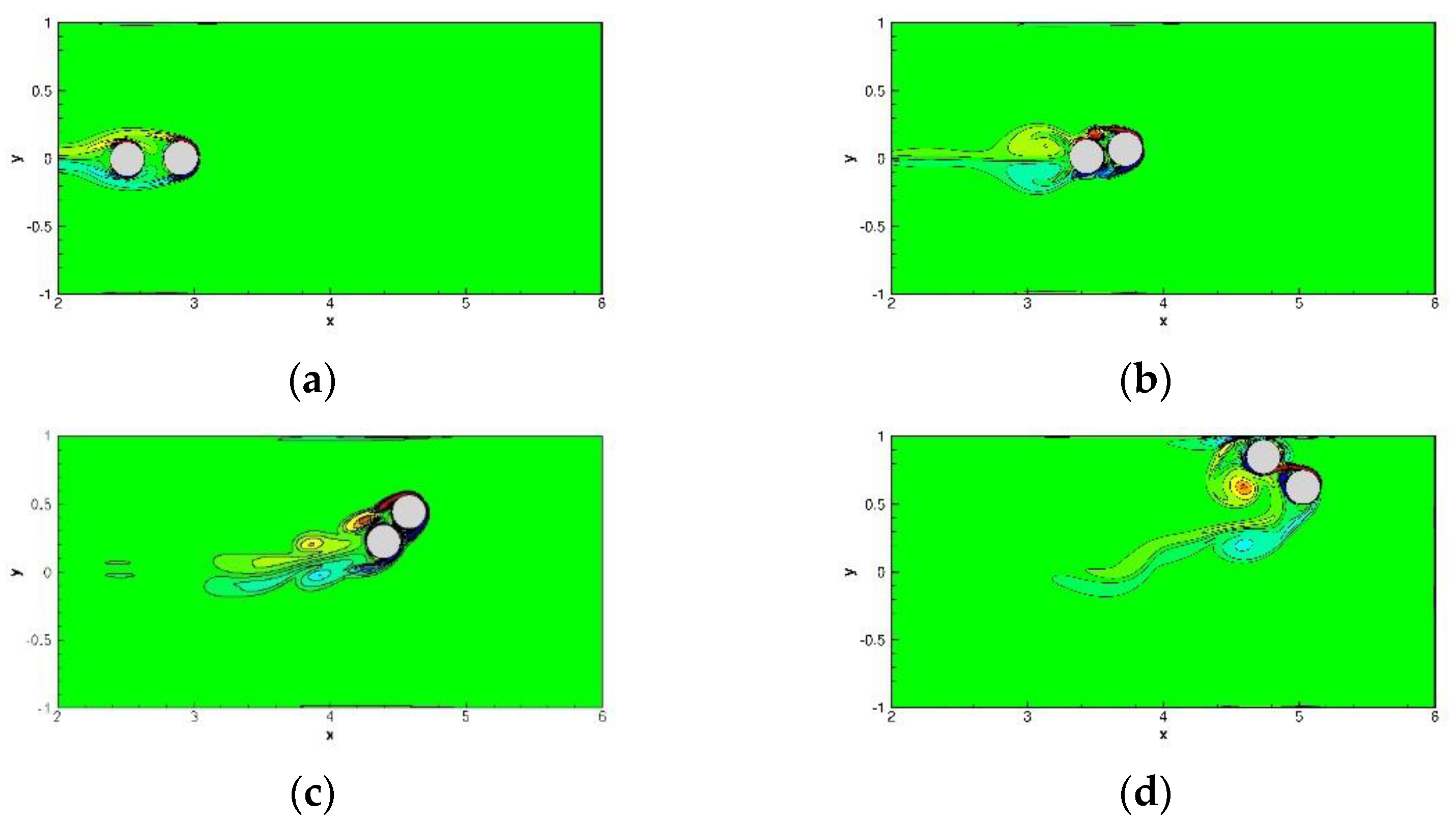
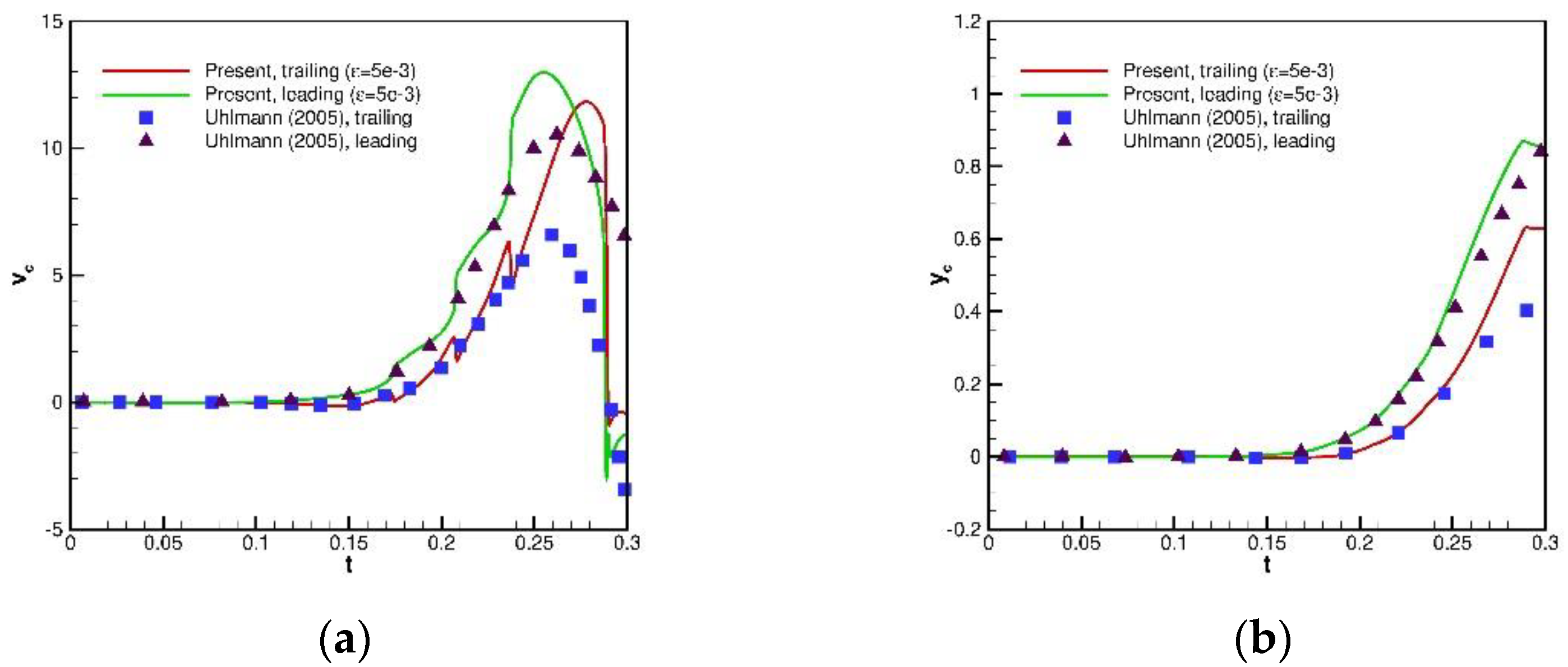
5.6. Drafting–Kissing–Tumbling (DKT) Problem of Two Free-Falling Circular Cylinders in Quiescent Flow
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Peskin, C.S. The immersed boundary method. Acta Numer. 2002, 11, 479–517. [Google Scholar] [CrossRef]
- Uhlmann, M. An immersed boundary method with direct forcing for the simulation of particulate flows. J. Comput. Phys. 2005, 209, 448–476. [Google Scholar] [CrossRef]
- Kempe, T.; Fröhlich, J. An improved immersed boundary method with direct forcing for the simulation of particle laden flows. J. Comput. Phys. 2012, 231, 3663–3684. [Google Scholar] [CrossRef]
- Breugem, W.P.A. Second-order accurate immersed boundary method for fully resolved simulations of particle-laden flows. J. Comput. Phys. 2012, 231, 4469–4498. [Google Scholar] [CrossRef]
- Zhang, L.T.; Gay, M. Immersed finite element method for fluid-structure interactions. J. Fluid Struct. 2007, 23, 839–857. [Google Scholar] [CrossRef]
- Luo, K.; Wang, Z.; Fan, J. A modified immersed boundary method for simulations of fluid–particle interactions. Comput. Methods Appl. Mech. Eng. 2007, 197, 36–46. [Google Scholar] [CrossRef]
- Wang, Z.; Fan, J.; Luo, K. Combined multi-direct forcing and immersed boundary method for simulating flows with moving particles. Int. J. Multiph. Flow 2008, 34, 283–302. [Google Scholar] [CrossRef]
- Yang, J.; Stern, F. A Sharp Interface Direct Forcing Immersed Boundary Approach for Fully Resolved Simulations of Particulate Flows. J. Fluids Eng. 2014, 136, 040904. [Google Scholar] [CrossRef]
- Horng, T.L.; Hsieh, P.W.; Yang, S.Y.; You, C.S. A simple direct-forcing immersed boundary projection method with prediction-correction for fluid-solid interaction problems. Comput. Fluids 2018, 176, 135–152. [Google Scholar] [CrossRef]
- Wu, J.; Shu, C. Particulate Flow Simulation via a Boundary Condition-Enforced Immersed Boundary-Lattice-Boltzmann Scheme. Commun. Comput. Phys. 2010, 7, 793–812. [Google Scholar]
- Hao, J.; Zhu, L. A lattice Boltzmann based implicit immersed boundary method for fluid–structure interaction. Comput. Math. Appl. 2010, 59, 185–193. [Google Scholar] [CrossRef]
- Wang, L.; Guo, Z.; Shi, B.; Zheng, C. Evaluation of Three Lattice Boltzmann Models for Particulate Flows. Commun. Comput. Phys. 2013, 13, 1151–1172. [Google Scholar] [CrossRef]
- Zhou, Q.; Fan, L.S. A second-order accurate immersed boundary-lattice Boltzmann method for particle-laden flows. J. Comput. Phys. 2014, 268, 269–301. [Google Scholar] [CrossRef]
- Zhang, H.; Trias, F.S.; Oliva, A.; Yang, D.; Tan, Y.; Shu, S.; Sheng, Y. PIBM: Particulate immersed boundary method for fluid–particle interaction problems. Powder Technol. 2015, 272, 1–13. [Google Scholar] [CrossRef]
- Coclite, A.; Ranaldo, S.; de Tullio, M.D.; Decuzzi, P.; Pascazio, G. Kinematic and dynamic forcing strategies for predicting the transport of inertial capsules via a combined lattice Boltzmann-Immersed Boundary method. Comput. Fluids 2019, 180, 41–53. [Google Scholar] [CrossRef]
- Coclite, A.; Ranaldo, S.; Pascazio, G.; Tullio, M.D. de A Lattice Boltzmann dynamic-Immersed Boundary scheme for the transport of deformable inertial capsules in low-Re flows. Comput. Math. Appl. 2020, 80, 2860–2876. [Google Scholar] [CrossRef]
- Chiu, P.H.; Poh, H.J. Development of an improved divergence-free-condition compensated coupled framework to solve flow problems with time-varying geometries. Int. J. Numer. Meth. Fluids 2021, 93, 44–70. [Google Scholar] [CrossRef]
- Chiu, P.H.; Lin, R.K.; Sheu, T.W.H. A differentially interpolated direct forcing immersed boundary method for predicting incompressible Navier–Stokes equations in time-varying complex geometries. J. Comput. Phys. 2010, 229, 4476–4500. [Google Scholar] [CrossRef]
- Yang, X.L.; Zhang, X.; Li, Z.L.; He, G.W. A smoothing technique for discrete delta functions with application to immersed boundary method in moving boundary simulations. J. Comput. Phys. 2009, 228, 7821–7836. [Google Scholar] [CrossRef]
- Chiu, P.H. An improved divergence-free-condition compensated method for solving incompressible flows on collocated grids. Comput. Fluids 2018, 162, 39–54. [Google Scholar] [CrossRef]
- Glowinski, R.; Guidoboni, G.; Pan, T.W. Wall-driven incompressible viscous flow in a two-dimensional semi-circular cavity. J. Comput. Phys. 2006, 216, 79–91. [Google Scholar] [CrossRef]
- Ding, L.; Shi, W.; Luo, H.; Zheng, H. Investigation of incompressible flow within 1/2 circular cavity using lattice Boltzmann method. Int. J. Numer. Meth. Fluids 2009, 60, 919–936. [Google Scholar] [CrossRef]
- Sheu, T.W.H.; Chiu, P.H. A divergence-free-condition compensated method for incompressible Navier-Stokes equations. Comput. Methods Appl. Mech. Eng. 2007, 196, 4479–4494. [Google Scholar] [CrossRef]
- Meneghini, J.R.; Saltara, F.; Siqueira, C.L.R.; Ferrari, J.A. Numerical simulation of flow interference between two circular cylinders in tandem and side-by-side arrangements. J. Fluids Struct. 2001, 15, 327–350. [Google Scholar] [CrossRef]
- Mahir, N.; Altac, Z. Numerical investigation of convective heat transfer in unsteady flow past two cylinders in tandem arrangements. Int. J. Heat Fluid Flow 2008, 29, 1309–1318. [Google Scholar] [CrossRef]
- Dehkordi, B.G.; Moghaddam, H.S.; Jafari, H.H. Numerical simulation of flow over two circular cylinders in tandem arrangement. J. Hydrodyn. Ser. B 2011, 23, 114–126. [Google Scholar] [CrossRef]
- Slaouti, A.; Stansby, P.K. Flow around two circular cylinders by the random vortex method. J. Fluids Struct. 1992, 6, 641–670. [Google Scholar] [CrossRef]
- Xu, S.; Wang, Z.J. An immersed interface method for simulating the interaction of a fluid with moving boundaries. J. Comput. Phys. 2006, 216, 454–493. [Google Scholar] [CrossRef]
- Glowinski, R.; Pan, T.W.; Hesla, T.I.; Joseph, D.D.; Périaux, J. A fictitious domain approach to the direct numerical simulation of incompressible viscous flow past moving rigid bodies: Application to particulate flow. J. Comput. Phys. 2009, 169, 363–426. [Google Scholar] [CrossRef]
- Wan, D.; Turek, S. Direct numerical simulation of particulate flow via multigrid FEM techniques and the fictitious boundary method. Int. J. Numer. Meth. Fluids 2006, 51, 531–566. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| = 1/10 | 3.380 × 10−2 | 3.380 × 10−2 | 2.053 × 10−2 |
| = 1/20 | 2.214 × 10−2 | 2.214 × 10−2 | 9.046 × 10−3 |
| = 1/40 | 1.911 × 10−3 | 1.911 × 10−3 | 9.115 × 10−4 |
| = 1/80 | 4.928 × 10−4 | 4.928 × 10−4 | 2.923 × 10−4 |
| D = 4 | |||||
| Meneghini et al., 2001 | 1.18 | 0.38 | --- | --- | 0.174 |
| Mahir and Altac, 2008 | 1.34 | 0.558 | 0.805 | 1.99 | 0.181 |
| Dehkordi et al., 2011 | 1.16 | 0.52 | --- | --- | 0.179 |
| Slaouti and Stansby, 1992 | 1.11 | 0.88 | 0.7 | 1.8 | 0.190 |
| Present study | 1.293 | 0.568 | 0.783 | 1.853 | 0.183 |
| D = 5 | |||||
| Mahir and Altac, 2008 | 1.327 | 0.455 | 0.731 | 1.569 | 0.186 |
| Slaouti and Stansby, 1992 | 0.97 | 0.7 | 0.55 | 1.6 | 0.180 |
| Present study | 1.277 | 0.418 | 0.702 | 1.482 | 0.185 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chiu, P.-H.; Weng, H.C.; Byrne, R.; Che, Y.Z.; Lin, Y.-T. An Immersed Boundary Method Based Improved Divergence-Free-Condition Compensated Coupled Framework for Solving the Flow–Particle Interactions. Energies 2021, 14, 1675. https://doi.org/10.3390/en14061675
Chiu P-H, Weng HC, Byrne R, Che YZ, Lin Y-T. An Immersed Boundary Method Based Improved Divergence-Free-Condition Compensated Coupled Framework for Solving the Flow–Particle Interactions. Energies. 2021; 14(6):1675. https://doi.org/10.3390/en14061675
Chicago/Turabian StyleChiu, Pao-Hsiung, Huei Chu Weng, Raymond Byrne, Yu Zhang Che, and Yan-Ting Lin. 2021. "An Immersed Boundary Method Based Improved Divergence-Free-Condition Compensated Coupled Framework for Solving the Flow–Particle Interactions" Energies 14, no. 6: 1675. https://doi.org/10.3390/en14061675
APA StyleChiu, P.-H., Weng, H. C., Byrne, R., Che, Y. Z., & Lin, Y.-T. (2021). An Immersed Boundary Method Based Improved Divergence-Free-Condition Compensated Coupled Framework for Solving the Flow–Particle Interactions. Energies, 14(6), 1675. https://doi.org/10.3390/en14061675