
Adaptive Fuzzy Approximation Control of PV Grid-Connected Inverters





Abstract
1. Introduction
- The paper proposes an adaptive fuzzy approximation control scheme for GCIS.
- Excellent tracking performance of the proposed controller is obtained under different operating conditions such as power factor, parameter, and modelling uncertainties.
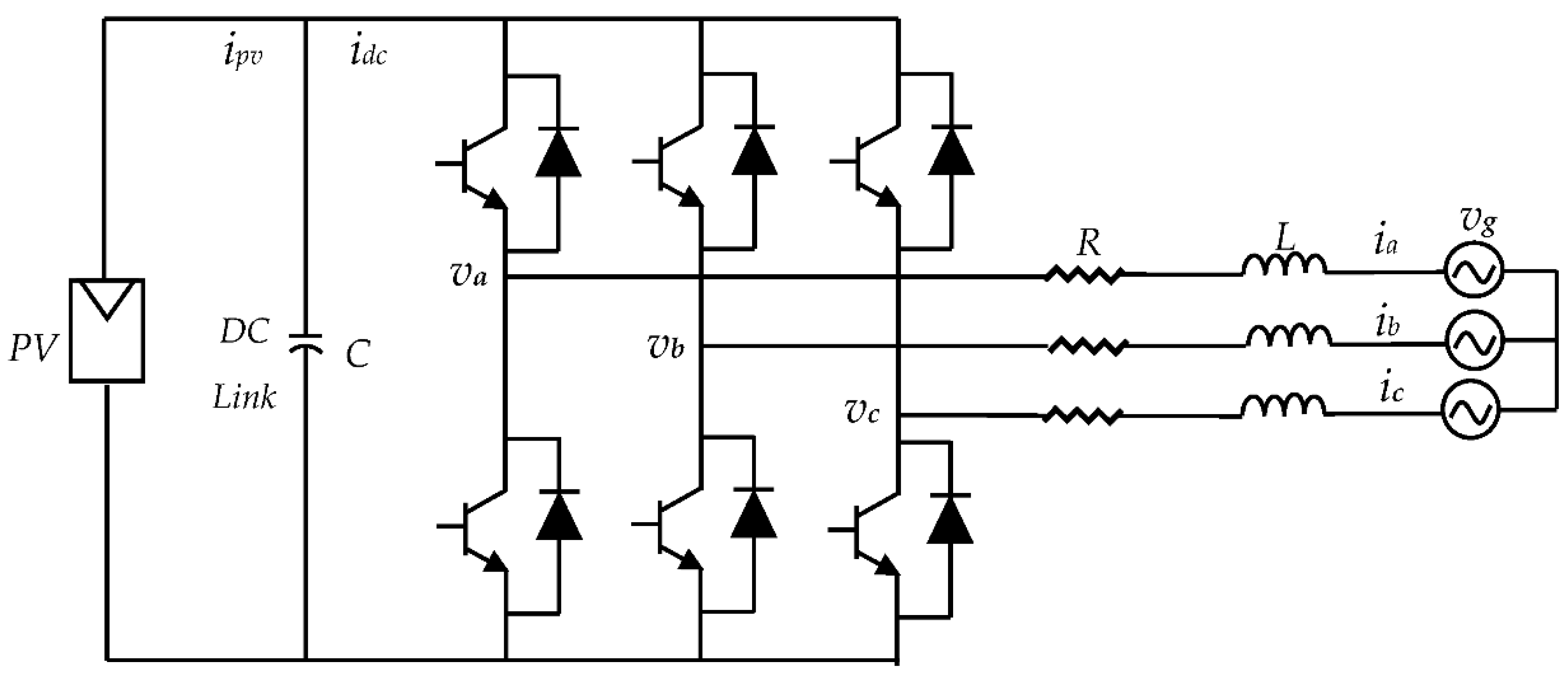
2. Grid-Connected Inverter System (GCIS)
2.1. GCIS Description
2.2. MIMO Model of GCIS
2.3. Input-Output Feedback Linearization of GCIS
3. The Proposed Controller
3.1. Adaptive Fuzzy Approximation Controller for GCIS
3.2. Closed-Loop Stability
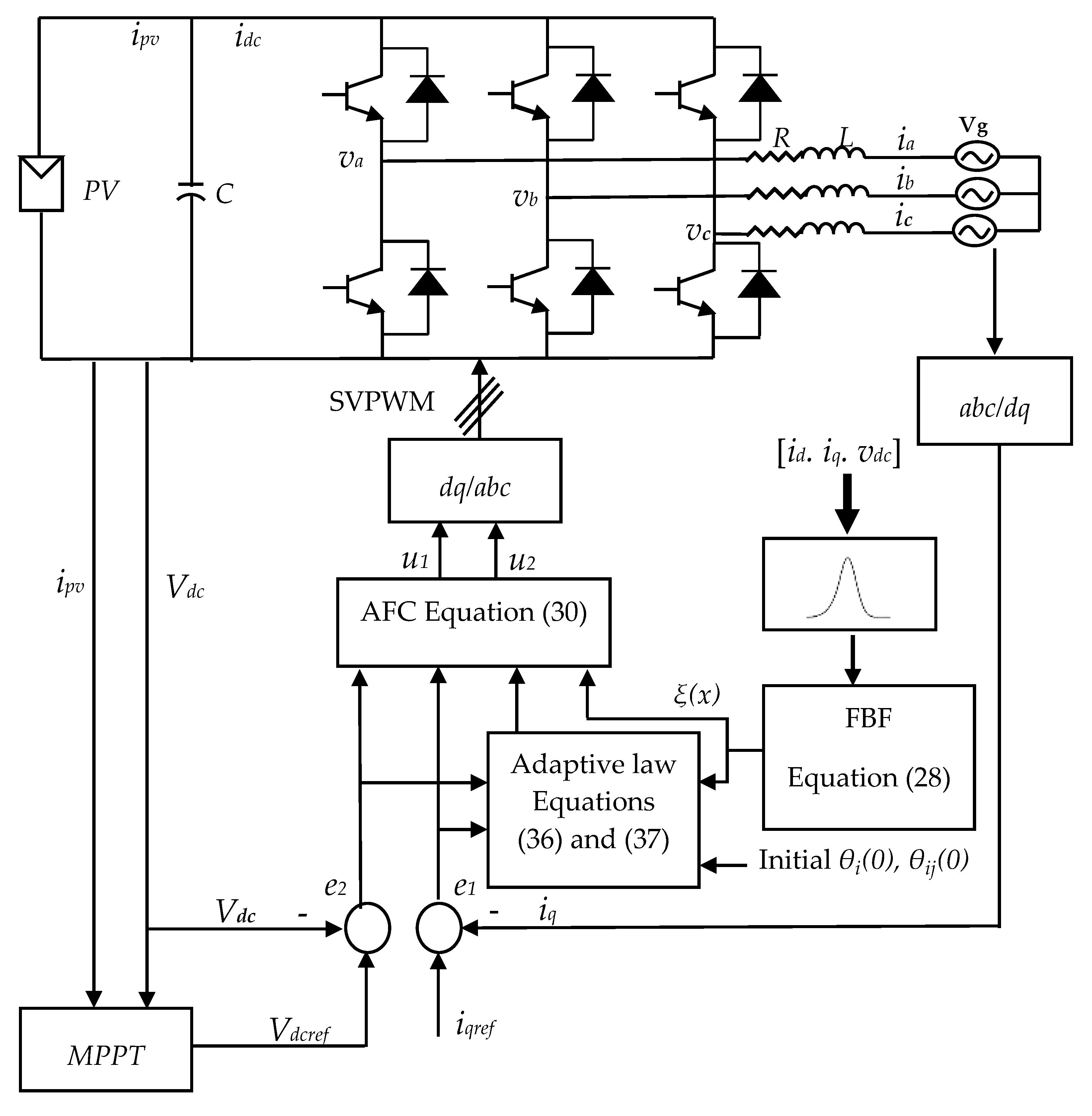
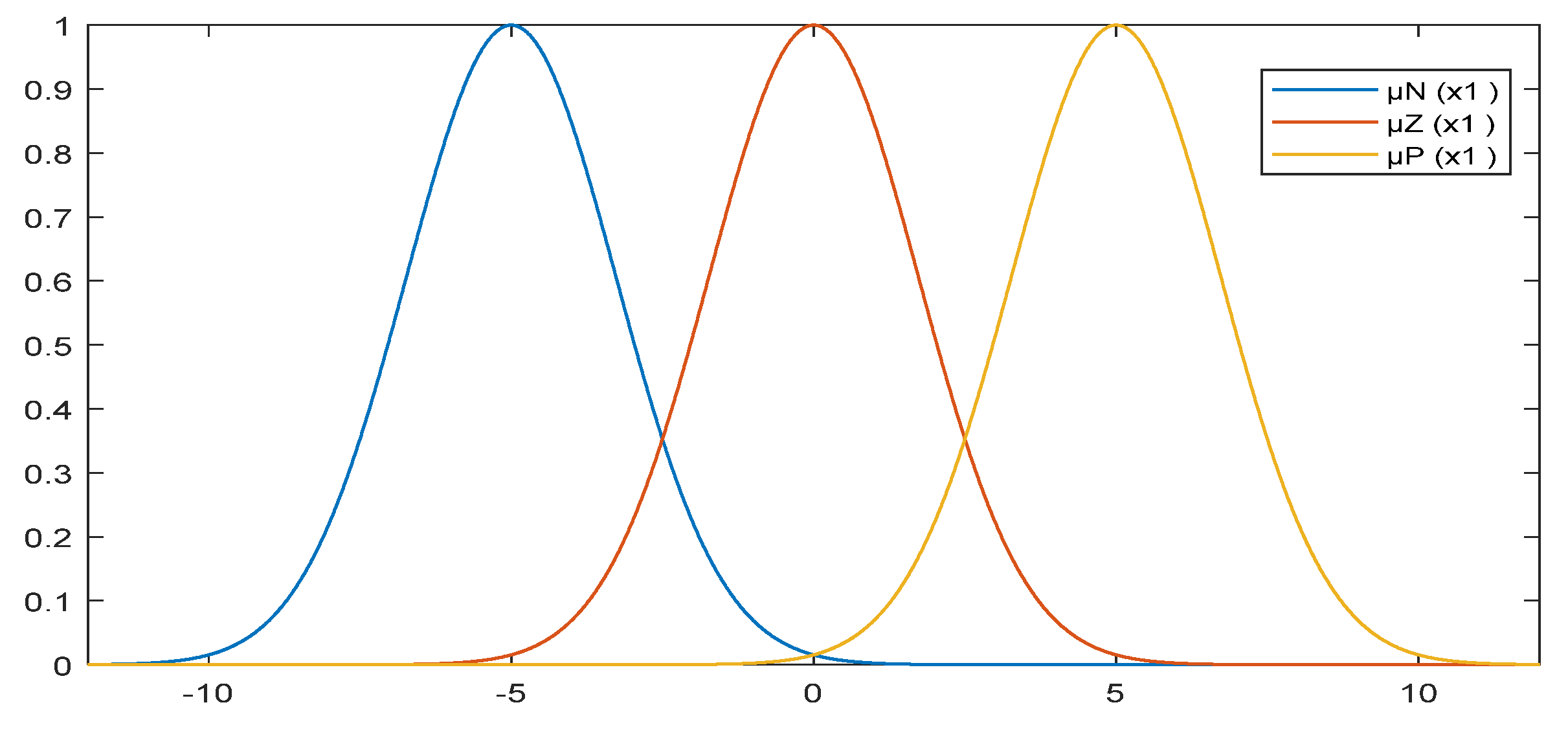
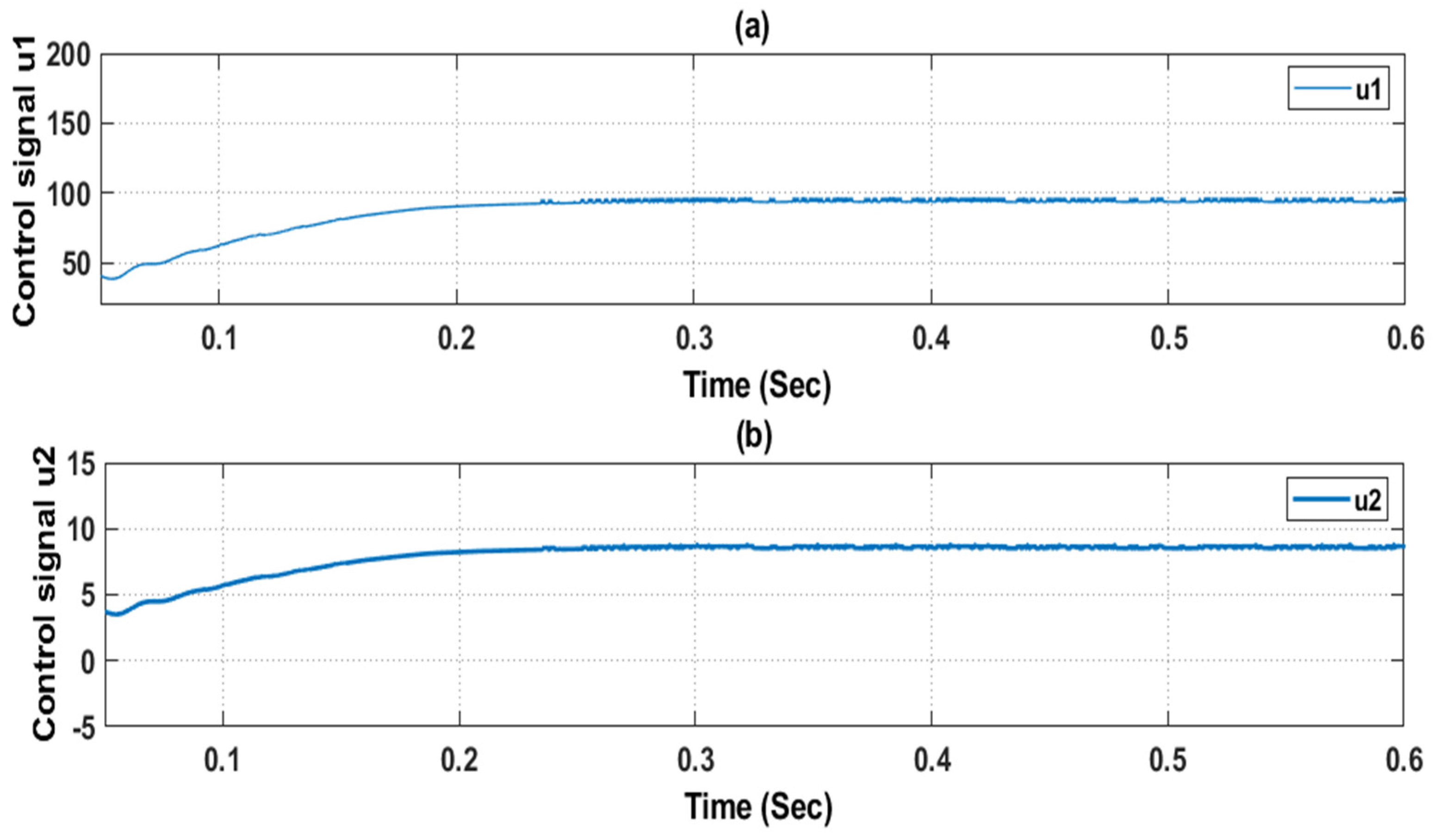
4. Implementation of the Proposed Adaptive Fuzzy Controller for GCIS
5. Simulation Cases and Results
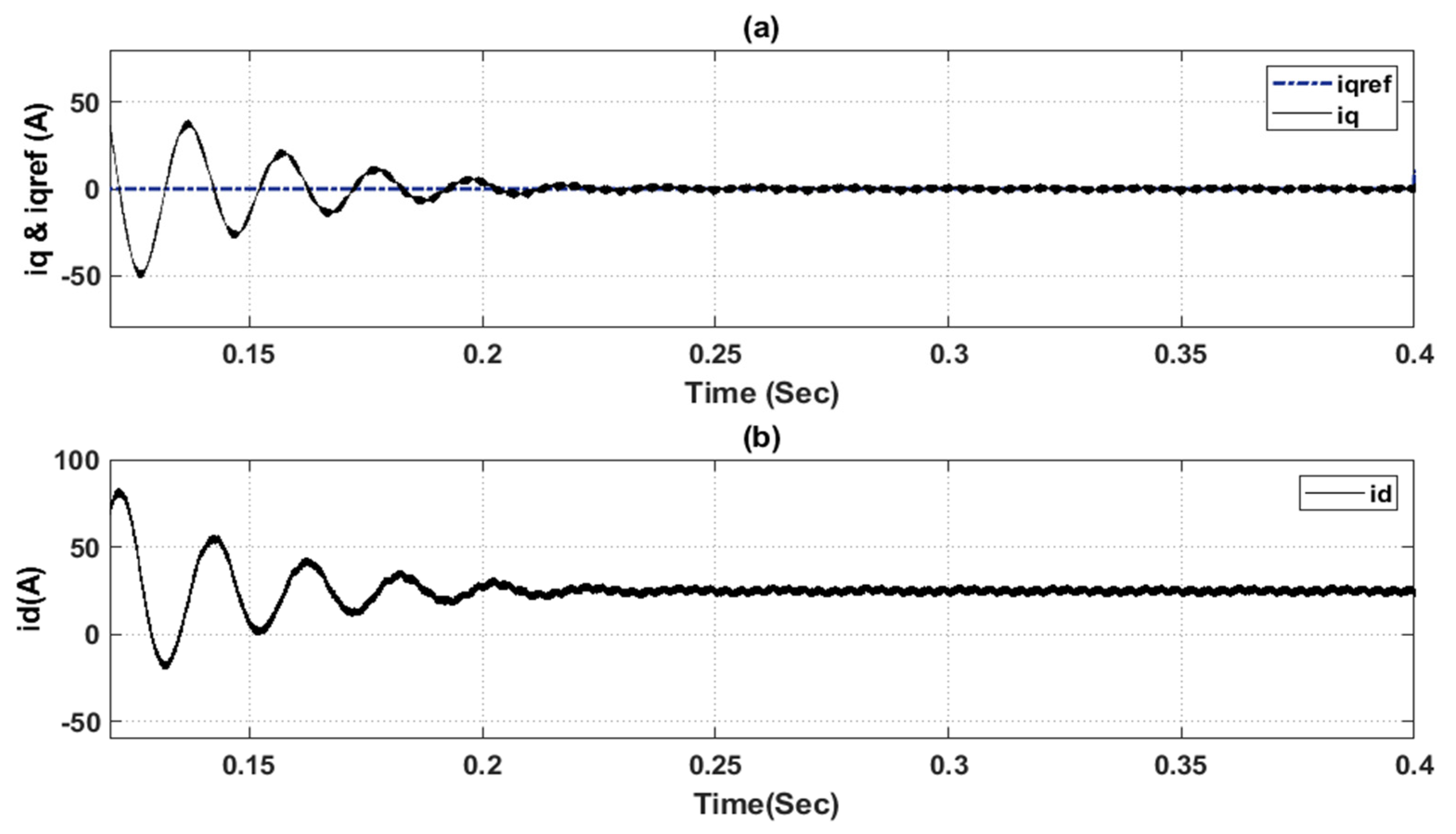
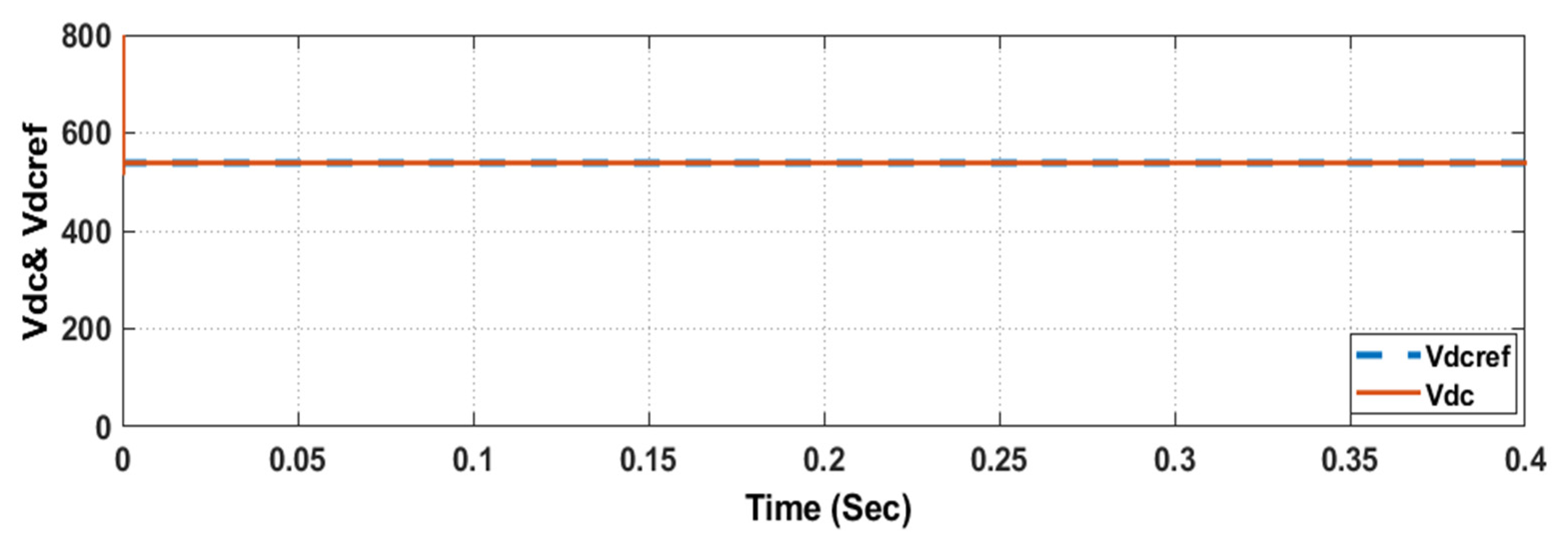
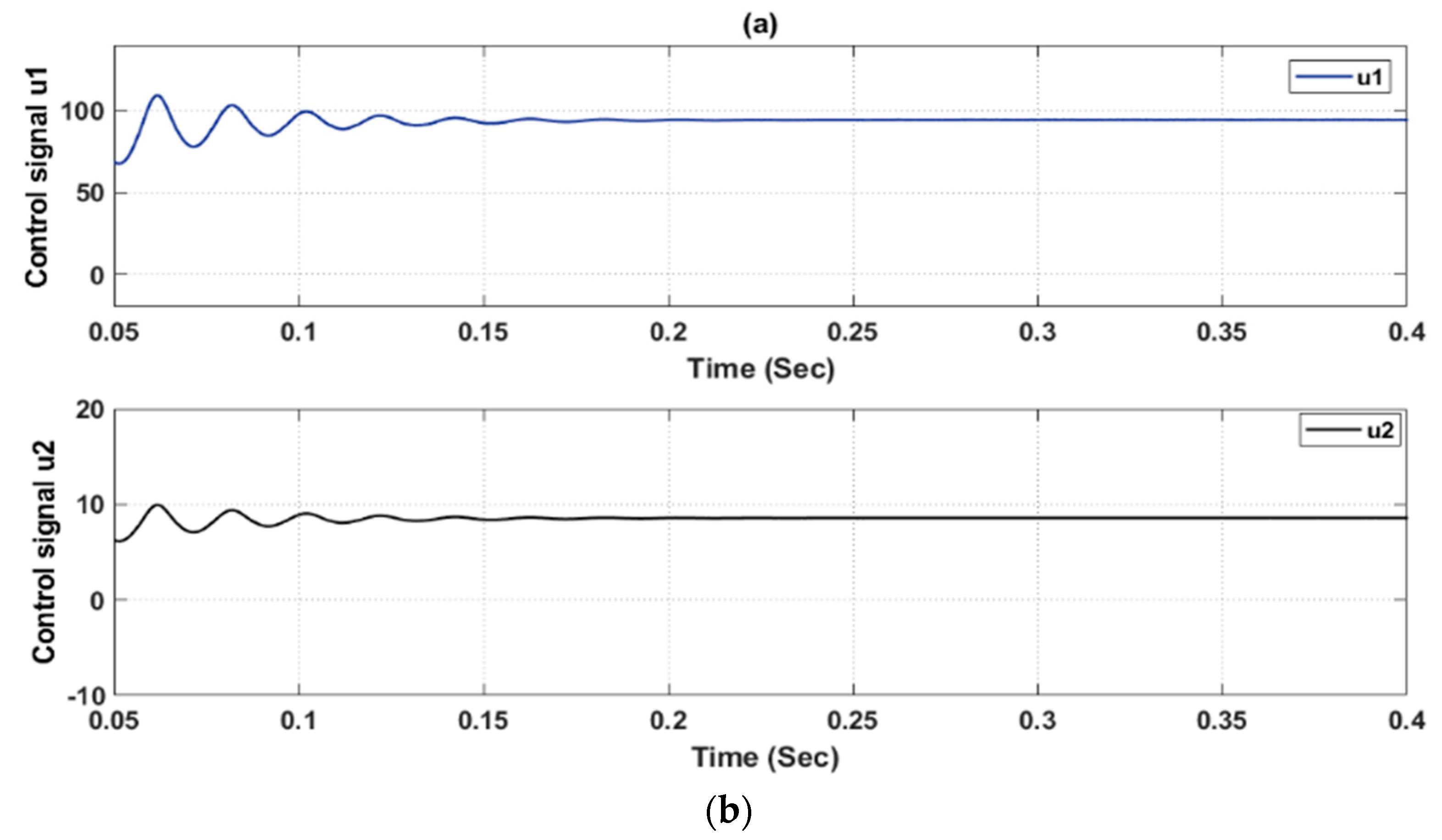
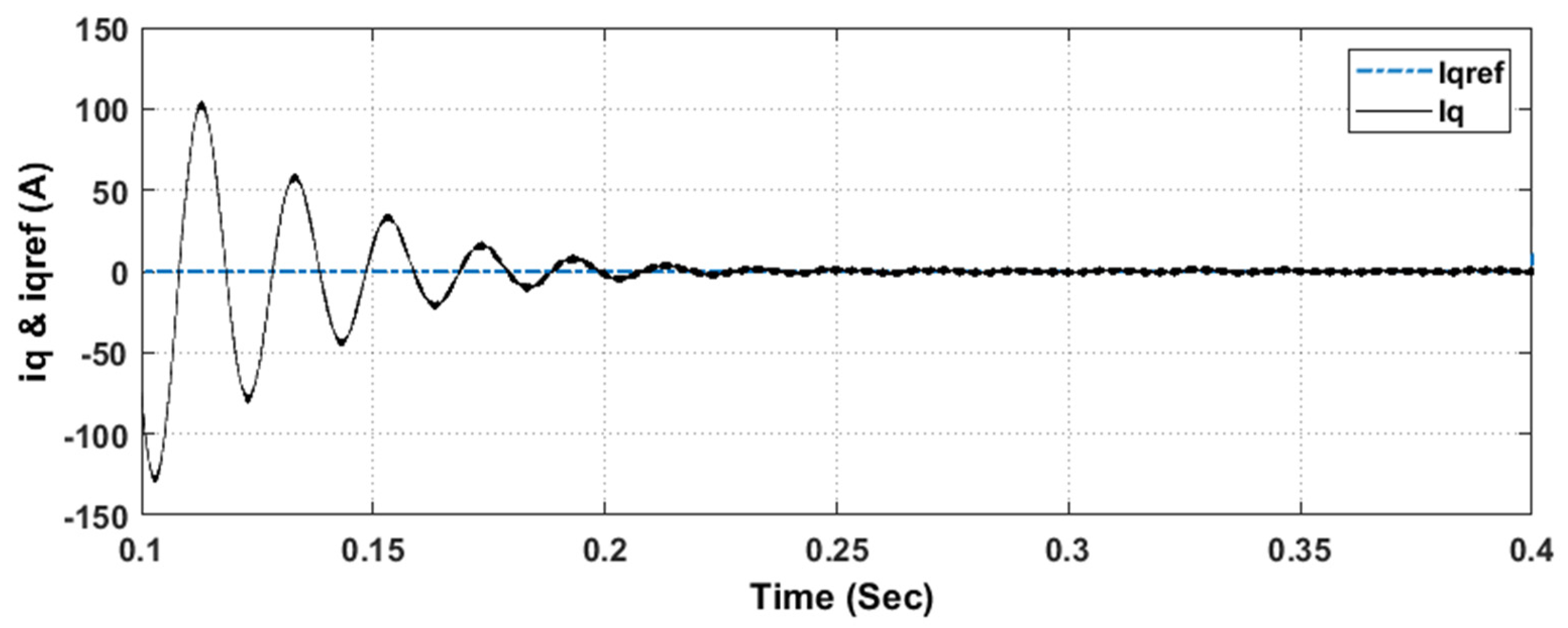
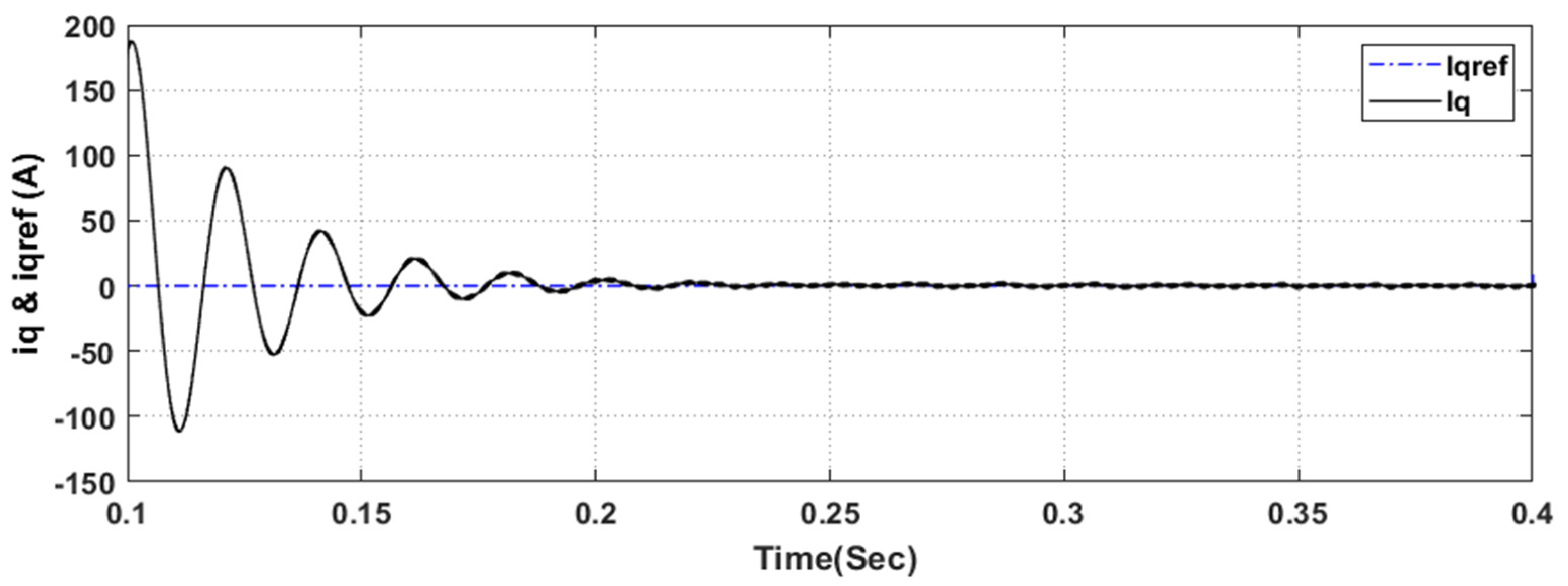
5.1. Case I: Unity Power Factor Tracking
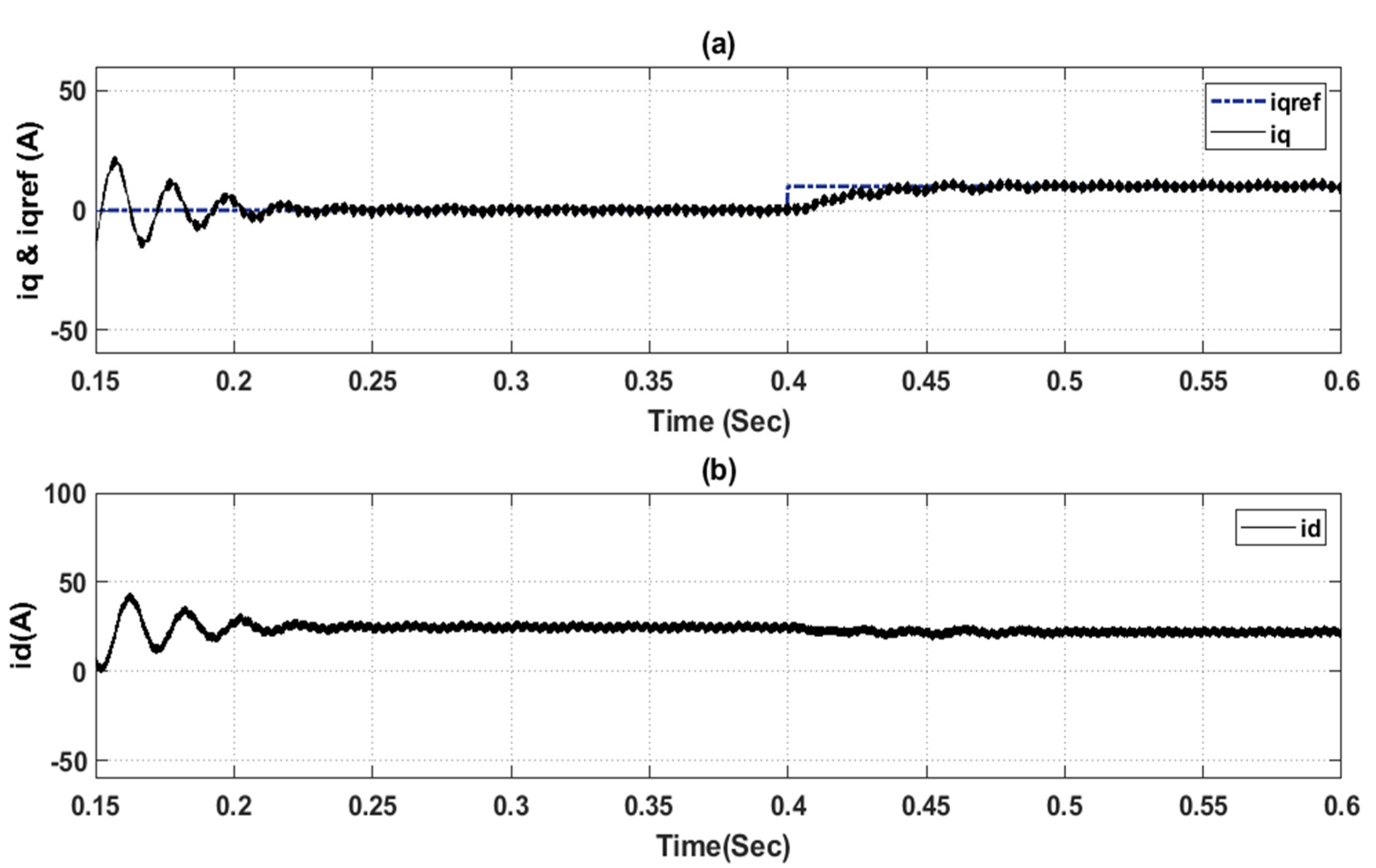
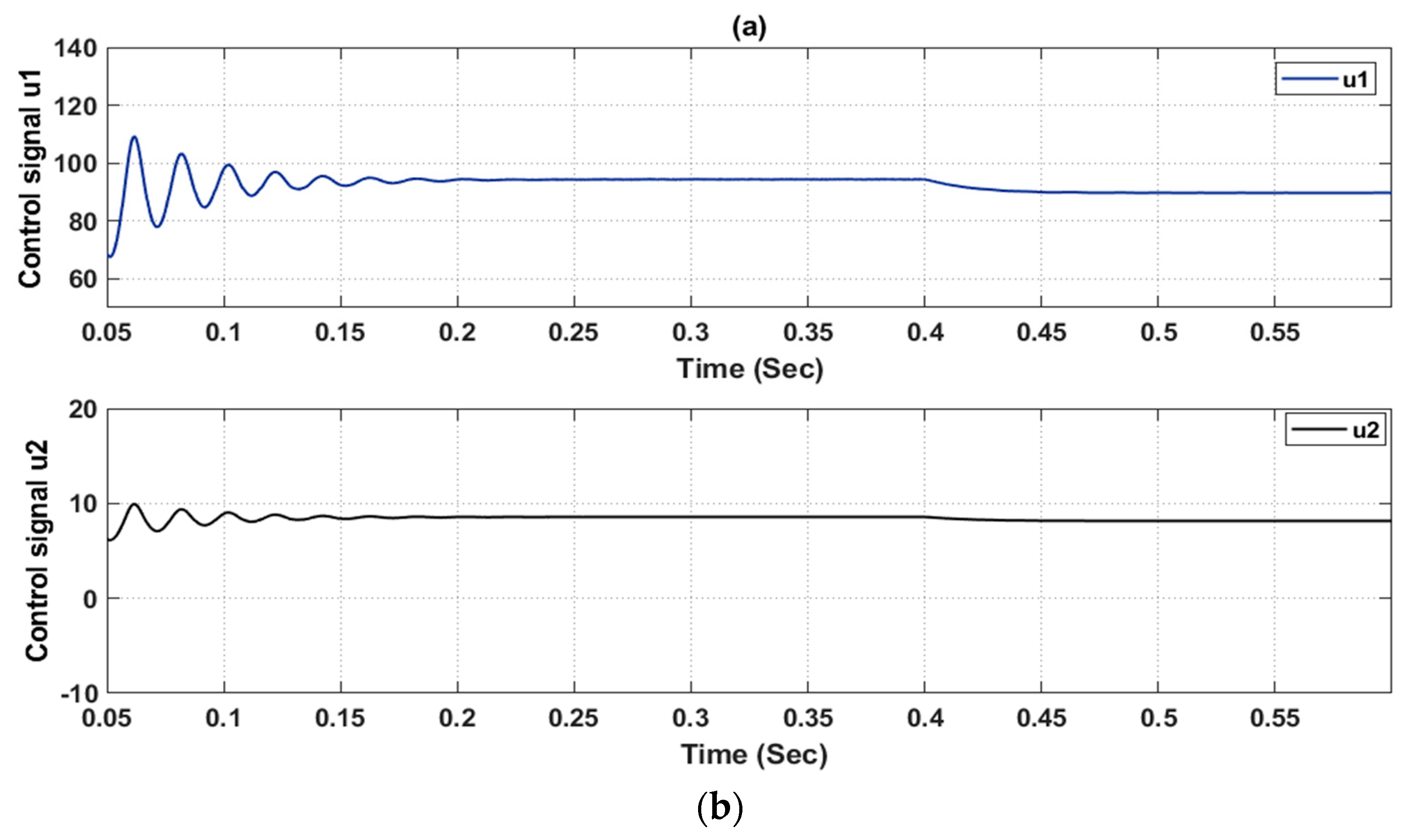
5.2. Case II: Tracking of Power Factor Changes
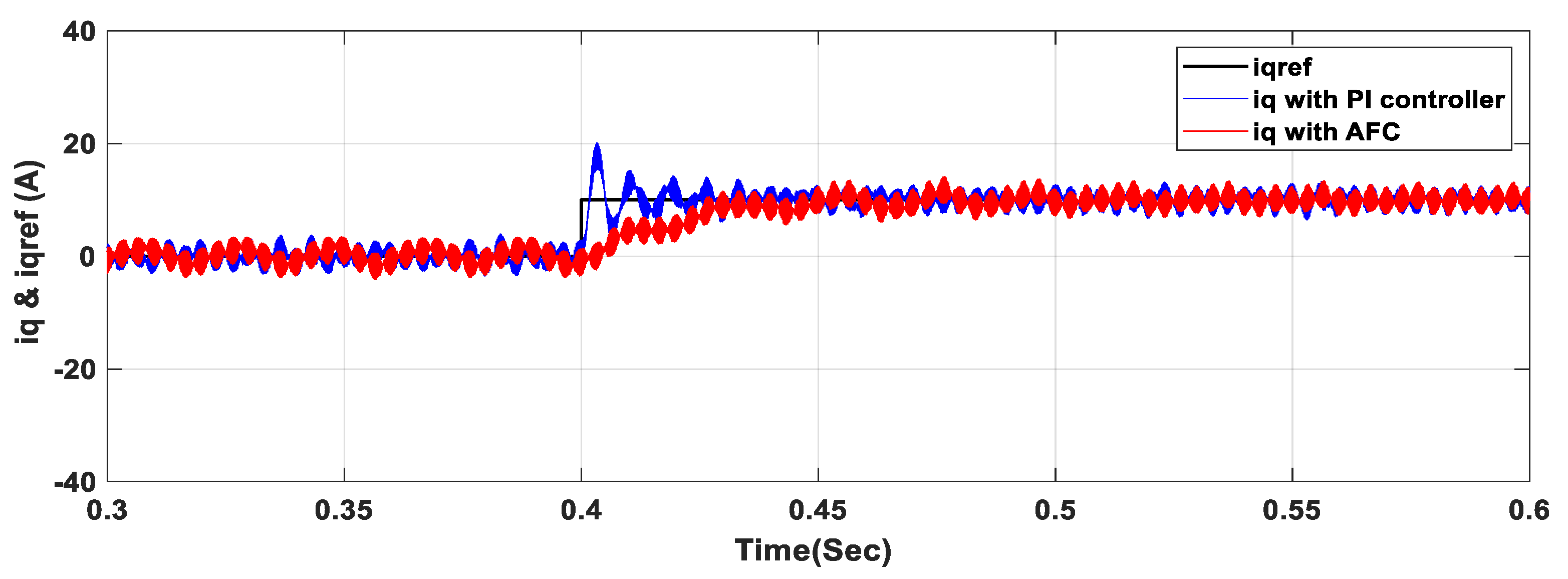
5.3. Case III: Robust Tracking
5.4. Case IV: Tracking in the Presence of Model Uncertainity
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AFC | Adaptive fuzzy control |
| DG | Distributed generation |
| FLC | Fuzzy logic controllers |
| GCIS | Grid-connected inverter systems |
| IC | Incremental conductance |
| IT2FLC | Interval Type-2 fuzzy logic controller |
| LQG | Linear Quadratic Gaussian |
| MIMO | Multi-input multi-output |
| PI | Proportional-integral |
| PR | Proportional resonant |
| P&O | Perturb and observe |
| PV | Photovoltaic |
| PWM | Pulse width-modulation |
| RC | Repetitive controller |
| RES | Renewable energy sources |
| SVPWM | Space vector pulse width modulation |
| T2FLC | Type-2 fuzzy logic controller |
| THD | Total harmonic distortion |
| TSKPFNN | Takagi–Sugeno–Kang-type probabilistic fuzzy neural network |
| VSI | Voltage source inverter |
References
- Zahedi, A. A review of drivers, benefits, and challenges in integrating renewable energy sources into electricity grid. Renew. Sustain. Energy Rev. 2011, 15, 4775–4779. [Google Scholar] [CrossRef]
- Dragicevic, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC Microgrids—Part II: A Review of Power Architectures, Applications, and Standardization Issues. IEEE Trans. Power Electron. 2016, 31, 3528–3549. [Google Scholar] [CrossRef]
- Abbasi, A.K.; Mustafa, M.W. Mathematical Model and Stability Analysis of Inverter-Based Distributed Generator. Math. Probl. Eng. 2013, 2013, 1–7. [Google Scholar] [CrossRef]
- Hadisupadmo, S.; Hadiputro, A.N.; Widyotriatmo, A. A small signal state space model of inverter-based microgrid control on single phase AC power network. Internetwork. Indones. J. 2016, 8, 71–76. [Google Scholar]
- Monica, P.; Kowsalya, M. Control strategies of parallel operated inverters in renewable energy application: A review. Renew. Sustain. Energy Rev. 2016, 65, 885–901. [Google Scholar] [CrossRef]
- Castilla, M.; Miret, J.; Camacho, A.; Matas, J.; De Vicuna, L.G. Reduction of Current Harmonic Distortion in Three-Phase Grid-Connected Photovoltaic Inverters via Resonant Current Control. IEEE Trans. Ind. Electron. 2011, 60, 1464–1472. [Google Scholar] [CrossRef]
- Shen, G.; Zhu, X.; Zhang, J.; Xu, D. A New Feedback Method for PR Current Control of LCL-Filter-Based Grid-Connected Inverter. IEEE Trans. Ind. Electron. 2010, 57, 2033–2041. [Google Scholar] [CrossRef]
- Huerta, F.; Pizarro, D.; Cobreces, S.; Rodriguez, F.J.; Giron, C.; Rodriguez, A. LQG Servo Controller for the Current Control of LCLLCL Grid-Connected Voltage-Source Converters. IEEE Trans. Ind. Electron. 2011, 59, 4272–4284. [Google Scholar] [CrossRef]
- Merabet, A.; Labib, L.; Ghias, A.M.Y.M.; Ghenai, C.; Salameh, T. Robust Feedback Linearizing Control with Sliding Mode Compensation for a Grid-Connected Photovoltaic Inverter System Under Unbalanced Grid Voltages. IEEE J. Photovolt. 2017, 7, 828–838. [Google Scholar] [CrossRef]
- Mahmud, M.A.; Hossain, M.J.; Pota, H.R.; Roy, N.K. Robust Nonlinear Controller Design for Three-Phase Grid-Connected Photovoltaic Systems Under Structured Uncertainties. IEEE Trans. Power Deliv. 2014, 29, 1221–1230. [Google Scholar] [CrossRef]
- Mohiuddin, S.; Mahmud, A.; Haruni, A.; Pota, H.R. Design and implementation of partial feedback linearizing controller for grid-connected fuel cell systems. Int. J. Electr. Power Energy Syst. 2017, 93, 414–425. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Yu, C.; Guo, L.; Cao, R. Hysteresis Model Predictive Control for High-Power Grid-Connected Inverters With Output LCL Filter. IEEE Trans. Ind. Electron. 2016, 63, 246–256. [Google Scholar] [CrossRef]
- López-Estrada, F.-R.; Rotondo, D.; Valencia-Palomo, G. A Review of Convex Approaches for Control, Observation and Safety of Linear Parameter Varying and Takagi-Sugeno Systems. Process 2019, 7, 814. [Google Scholar] [CrossRef]
- Hornik, T.; Zhong, Q.-C. A Current-Control Strategy for Voltage-Source Inverters in Microgrids Based on H∞H∞ and Repetitive Control. IEEE Trans. Power Electron. 2010, 26, 943–952. [Google Scholar] [CrossRef]
- Hasanien, H.M. An Adaptive Control Strategy for Low Voltage Ride Through Capability Enhancement of Grid-Connected Photovoltaic Power Plants. IEEE Trans. Power Syst. 2016, 31, 3230–3237. [Google Scholar] [CrossRef]
- Jorge, S.G.; Busada, C.A.; Solsona, J.A. Frequency-Adaptive Current Controller for Three-Phase Grid-Connected Converters. IEEE Trans. Ind. Electron. 2012, 60, 4169–4177. [Google Scholar] [CrossRef]
- Li, X.; Zhang, H.; Shadmand, M.B.; Balog, R.S. Model Predictive Control of a Voltage-Source Inverter With Seamless Transition Between Islanded and Grid-Connected Operations. IEEE Trans. Ind. Electron. 2017, 64, 7906–7918. [Google Scholar] [CrossRef]
- Errouissi, R.; Muyeen, S.M.; Al-Durra, A.; Leng, S. Experimental Validation of a Robust Continuous Nonlinear Model Predictive Control Based Grid-Interlinked Photovoltaic Inverter. IEEE Trans. Ind. Electron. 2015, 63, 4495–4505. [Google Scholar] [CrossRef]
- Almeida, P.M.; Duarte, J.L.; Ribeiro, P.F.; Barbosa, P.G. Repetitive controller for improving grid-connected photovoltaic systems. IET Power Electron. 2014, 7, 1466–1474. [Google Scholar] [CrossRef]
- Harirchian, E.; Lahmer, T. Improved Rapid Visual Earthquake Hazard Safety Evaluation of Existing Buildings Using a Type-2 Fuzzy Logic Model. Appl. Sci. 2020, 10, 2375. [Google Scholar] [CrossRef]
- Tarbosh, Q.A.; Aydogdu, O.; Farah, N.; Talib, H.N.; Salh, A.; Cankaya, N.; Omar, F.A.; Durdu, A. Review and Investigation of Simplified Rules Fuzzy Logic Speed Controller of High Performance Induction Motor Drives. IEEE Access 2020, 8, 49377–49394. [Google Scholar] [CrossRef]
- Pushpavalli, M.; Swaroopan, N.M.J. KY converter with fuzzy logic controller for hybrid renewable photovoltaic/wind power system. Trans. Emerg. Telecommun. Technol. 2020, 31, 3989. [Google Scholar] [CrossRef]
- Mumtaz, S.; Ahmad, S.; Khan, L.; Ali, S.; Kamal, T.; Hassan, S.Z. Adaptive Feedback Linearization Based NeuroFuzzy Maximum Power Point Tracking for a Photovoltaic System. Energies 2018, 11, 606. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Power management of an isolated hybrid AC/DC micro-grid with fuzzy control of battery banks. IET Renew. Power Gener. 2015, 9, 484–493. [Google Scholar] [CrossRef]
- Harirchian, E.; Lahmer, T. Developing a hierarchical type-2 fuzzy logic model to improve rapid evaluation of earthquake hazard safety of existing buildings. Structures 2020, 28, 1384–1399. [Google Scholar] [CrossRef]
- Mittal, K.; Jain, A.; Vaisla, K.S.; Castillo, O.; Kacprzyk, J. A comprehensive review on type 2 fuzzy logic applications: Past, present and future. Eng. Appl. Artif. Intell. 2020, 95, 103916. [Google Scholar] [CrossRef]
- Chen, G.; Pham, T.T.; Boustany, N. Introduction to Fuzzy Sets, Fuzzy Logic, and Fuzzy Control Systems. Appl. Mech. Rev. 2001, 54, B102–B103. [Google Scholar] [CrossRef]
- Hannan, M.; Ghani, Z.A.; Mohamed, A.; Uddin, M.N. Real-time testing of a fuzzy-logic-controller-based grid-connected photovoltaic inverter system. IEEE Trans. Ind. Appl. 2015, 51, 4775–4784. [Google Scholar] [CrossRef]
- Muyeen, S.M.; Al-Durra, A. Modeling and Control Strategies of Fuzzy Logic Controlled Inverter System for Grid Interconnected Variable Speed Wind Generator. IEEE Syst. J. 2013, 7, 817–824. [Google Scholar] [CrossRef]
- Lin, P.-Z.; Hsu, C.-F.; Lee, T.-T. Type-2 Fuzzy Logic Controller Design for Buck DC-DC Converters. In Proceedings of the 14th IEEE International Conference on Fuzzy Systems, FUZZ ’05, Reno, NV, USA, 25–25 May 2005. [Google Scholar] [CrossRef]
- Altın, N. Interval Type-2 Fuzzy Logic Controller Based Maximum Power Point Tracking in Photovoltaic Systems. Adv. Electr. Comput. Eng. 2013, 13, 65–70. [Google Scholar] [CrossRef]
- El Khateb, A.H.; Rahim, N.A.; Selvaraj, J. Type-2 Fuzzy Logic Approach of a Maximum Power Point Tracking Employing SEPIC Converter forPhotovoltaic System. J. Clean Energy Technol. 2013, 1, 41–44. [Google Scholar] [CrossRef]
- Altin, N. Single phase grid interactive PV system with MPPT capability based on type-2 fuzzy logic systems. In Proceedings of the 2012 International Conference on Renewable Energy Research and Applications (ICRERA), Nagasaki, Japan, 11–14 November 2012; pp. 1–6. [Google Scholar]
- Hannan, M.A.; Ghani, Z.A.; Hoque, M.; Ker, P.J.; Hussain, A.; Mohamed, A. Fuzzy Logic Inverter Controller in Photovoltaic Applications: Issues and Recommendations. IEEE Access 2019, 7, 24934–24955. [Google Scholar] [CrossRef]
- Lin, F.-J.; Lu, K.-C.; Ke, T.-H.; Yang, B.-H.; Chang, Y.-R. Reactive Power Control of Three-Phase Grid-Connected PV System During Grid Faults Using Takagi–Sugeno–Kang Probabilistic Fuzzy Neural Network Control. IEEE Trans. Ind. Electron. 2015, 62, 5516–5528. [Google Scholar] [CrossRef]
- Lin, F.-J.; Lu, K.-C.; Yang, B.-H. Recurrent Fuzzy Cerebellar Model Articulation Neural Network Based Power Control of a Single-Stage Three-Phase Grid-Connected Photovoltaic System During Grid Faults. IEEE Trans. Ind. Electron. 2016, 64, 1258–1268. [Google Scholar] [CrossRef]
- Wang, L.-X. A Course in Fuzzy Systems and Control; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Wang, L.X.; Ying, H. Adaptive fuzzy systems and control: Design and stability analysis. J. Intell. Fuzzy Syst. Appl. Eng. Technol. 1995, 3, 187. [Google Scholar]
- Yousef, H.A.; Wahba, M.A. Adaptive fuzzy mimo control of induction motors. Expert Syst. Appl. 2009, 36, 4171–4175. [Google Scholar] [CrossRef]
- Nguyen, H.M. Advanced Control Strategies for Wind Energy Conversion Systems. Ph.D. Thesis, Idaho State University, Pocatello, ID, USA, 2013. [Google Scholar]
- Zhou, C.; Quach, D.-C.; Xiong, N.; Huang, S.; Zhang, Q.; Yin, Q.; Vasilakos, A.V. An Improved Direct Adaptive Fuzzy Controller of an Uncertain PMSM for Web-Based E-Service Systems. IEEE Trans. Fuzzy Syst. 2014, 23, 58–71. [Google Scholar] [CrossRef]
- Liu, X.; Zhai, D.; Dong, J.; Zhang, Q. Adaptive fault-tolerant control with prescribed performance for switched nonlinear pure-feedback systems. J. Frankl. Inst. 2018, 355, 273–290. [Google Scholar] [CrossRef]
- Li, Y.-X.; Yang, G.-H. Adaptive fuzzy fault tolerant tracking control for a class of uncertain switched nonlinear systems with output constraints. J. Frankl. Inst. 2016, 353, 2999–3020. [Google Scholar] [CrossRef]
- Yazdani, A.; Di Fazio, A.R.; Ghoddami, H.; Russo, M.; Kazerani, M.; Jatskevich, J.; Strunz, K.; Leva, S.; Martinez, J.A. Modeling Guidelines and a Benchmark for Power System Simulation Studies of Three-Phase Single-Stage Photovoltaic Systems. IEEE Trans. Power Deliv. 2010, 26, 1247–1264. [Google Scholar] [CrossRef]
- Chen, P.-C.; Liu, Y.-H.; Chen, J.-H.; Luo, Y.-F. A comparative study on maximum power point tracking techniques for photovoltaic generation systems operating under fast changing environments. Sol. Energy 2015, 119, 261–276. [Google Scholar] [CrossRef]
- Lalili, D.; Mellit, A.; Lourci, N.; Medjahed, B.; Boubakir, C. State feedback control and variable step size MPPT algorithm of three-level grid-connected photovoltaic inverter. Sol. Energy 2013, 98, 561–571. [Google Scholar] [CrossRef]
- Khalil, H.K.; Grizzle, J.W. Nonlinear Systems; Prentice Hall: Upper Saddle River, NJ, USA, 2002; Volume 3. [Google Scholar]
- Ross, T.J. Fuzzy Logic with Engineering Applications, 4th ed.; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Hosseinzadeh, M.; Yazdanpanah, M.J. Performance enhanced model reference adaptive control through switching non-quadratic Lyapunov functions. Syst. Control. Lett. 2015, 76, 47–55. [Google Scholar] [CrossRef]
- MATLAB. MATLAB R2018b; The MathWorks: Natick, MA, USA, 2018. [Google Scholar]
- Arzani, A.; Arunagirinathan, P.; Venayagamoorthy, G.K.; Ali, A.; Paranietharan, A.; Kumar, V.G. Development of Optimal PI Controllers for a Grid-Tied Photovoltaic Inverter. In Proceedings of the 2015 IEEE Symposium Series on Computational Intelligence, Institute of Electrical and Electronics Engineers. Cape Town, South Africa, 8–10 December 2015; pp. 1272–1279. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Grid Voltage rms | 120 V |
| Inductance L Resistor R | 2 mH 0.1 Ω |
| Grid Frequency | 50 Hz |
| DC link capacitor | 2200 µF |
| PV array voltage Vdc | 540 V |
| PV array current Ipv | 3.46 A |
| N | Z | P | ||
|---|---|---|---|---|
| Controller | Max Overshoot % | Settling Time (S) |
|---|---|---|
| PI controller | 75 | 0.04 |
| TSKPFNN controller | 12.24 | 0.3 |
| Proposed AFC | 0.0 | 0.035 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shadoul, M.; Yousef, H.; Al Abri, R.; Al-Hinai, A. Adaptive Fuzzy Approximation Control of PV Grid-Connected Inverters. Energies 2021, 14, 942. https://doi.org/10.3390/en14040942
Shadoul M, Yousef H, Al Abri R, Al-Hinai A. Adaptive Fuzzy Approximation Control of PV Grid-Connected Inverters. Energies. 2021; 14(4):942. https://doi.org/10.3390/en14040942
Chicago/Turabian StyleShadoul, Myada, Hassan Yousef, Rashid Al Abri, and Amer Al-Hinai. 2021. "Adaptive Fuzzy Approximation Control of PV Grid-Connected Inverters" Energies 14, no. 4: 942. https://doi.org/10.3390/en14040942
APA StyleShadoul, M., Yousef, H., Al Abri, R., & Al-Hinai, A. (2021). Adaptive Fuzzy Approximation Control of PV Grid-Connected Inverters. Energies, 14(4), 942. https://doi.org/10.3390/en14040942