Damping Studies on PMLG-Based Wave Energy Converter under Oceanic Wave Climates



Abstract
1. Introduction
- The numeric model was verified on a PMLG-type WEC with experimental results.
- The power profiles were investigated in relation to a limited variation of sea states.
- The damping impact was studied toward the WEC’s power production.
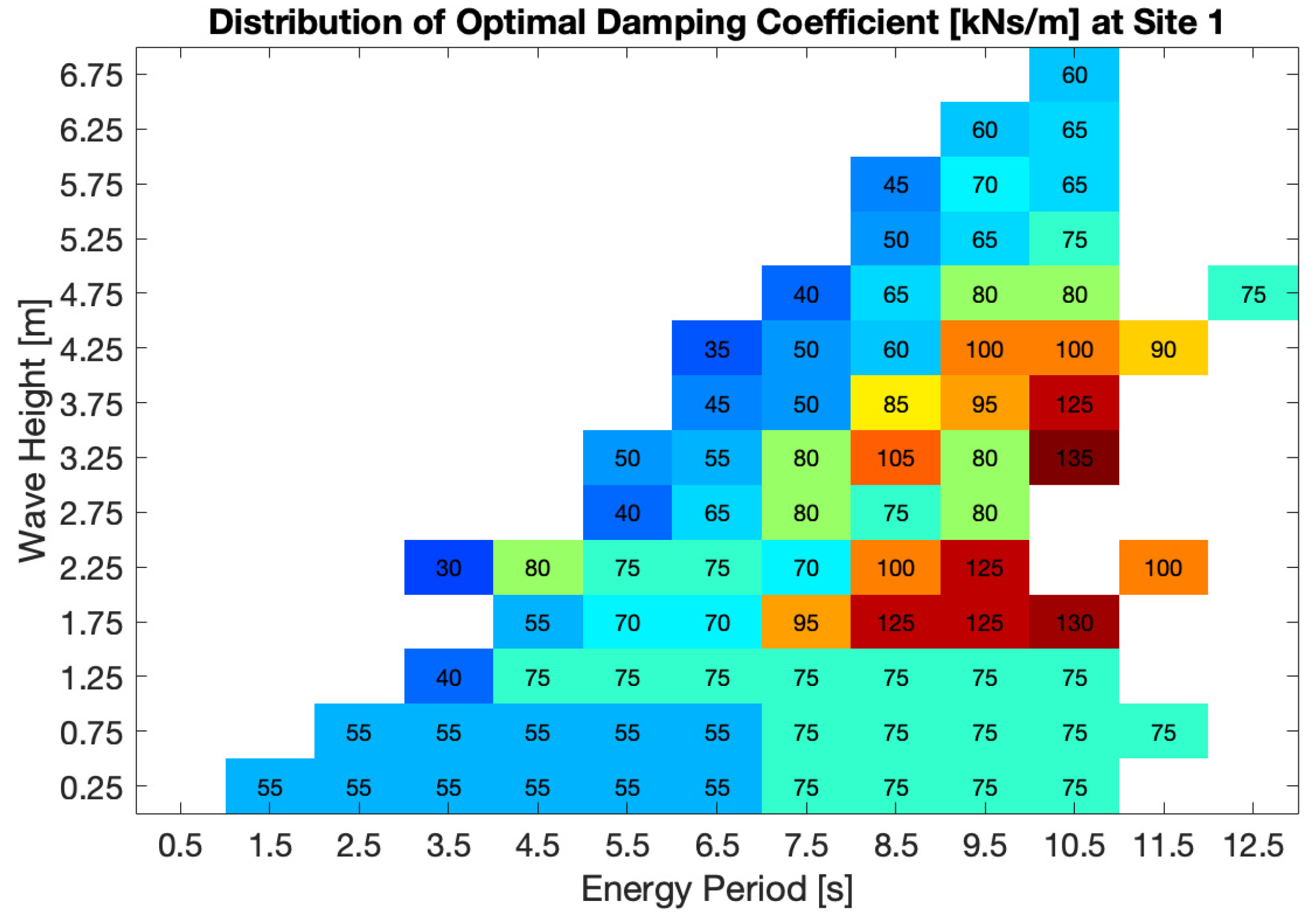
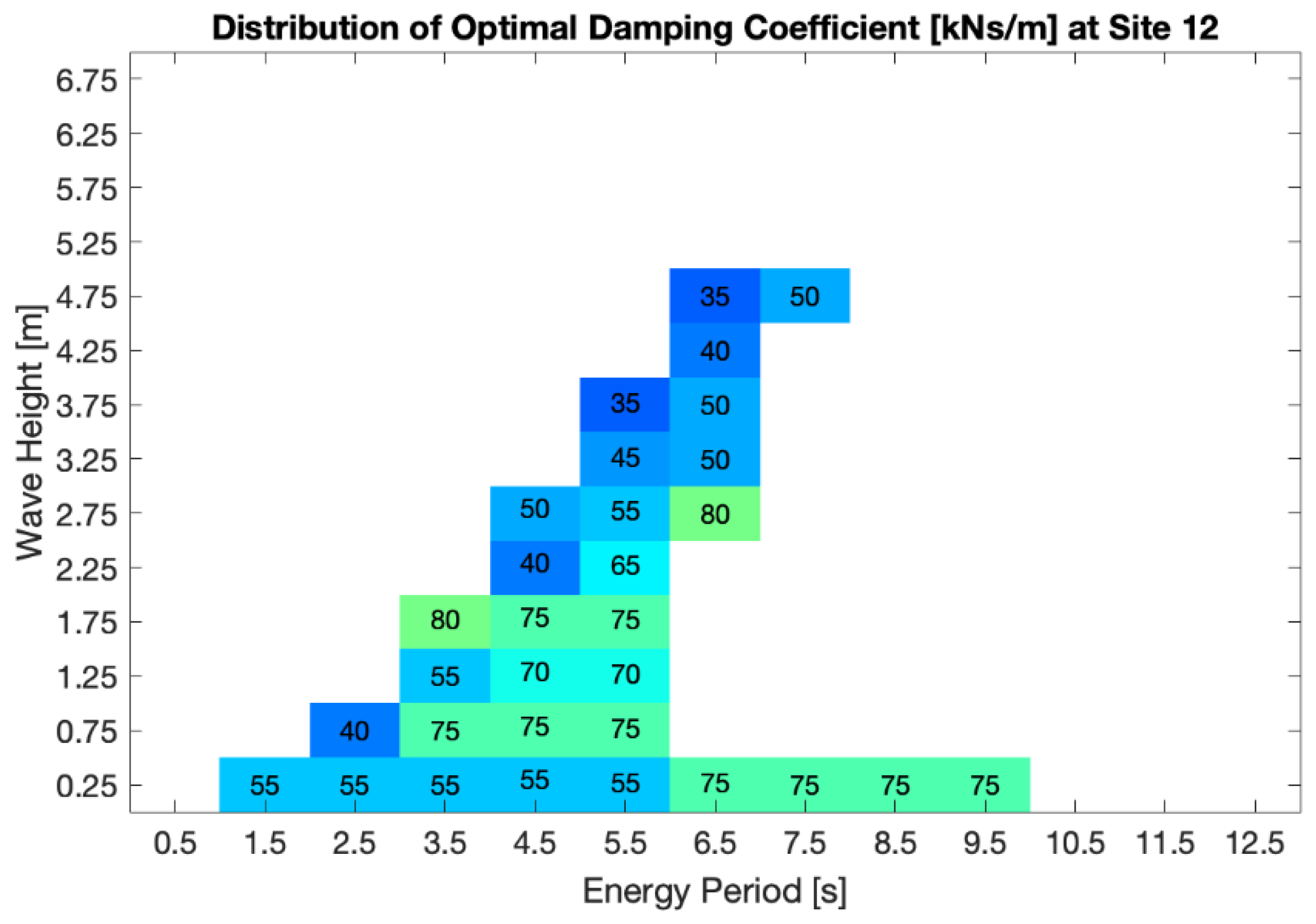
- Power matrix was obtained under optimal damping cases at two different test sites.
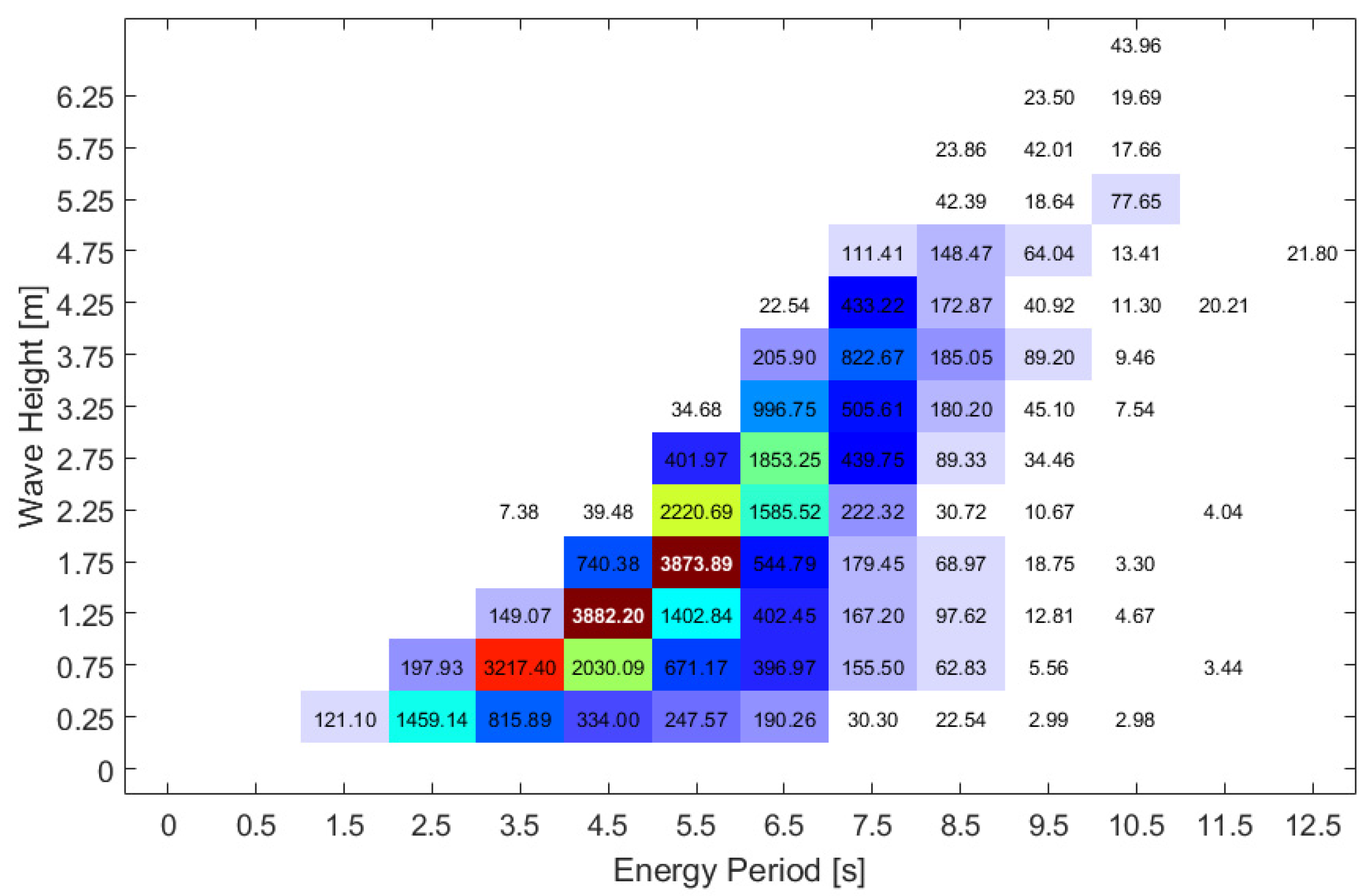
- Annual energy production was estimated and compared between optimal damping and constant damping cases at different test sites.
2. Wave Energy Project at Uppsala University
3. Theories on Hydrodynamics and Energy Conversion
4. Materials and Methods
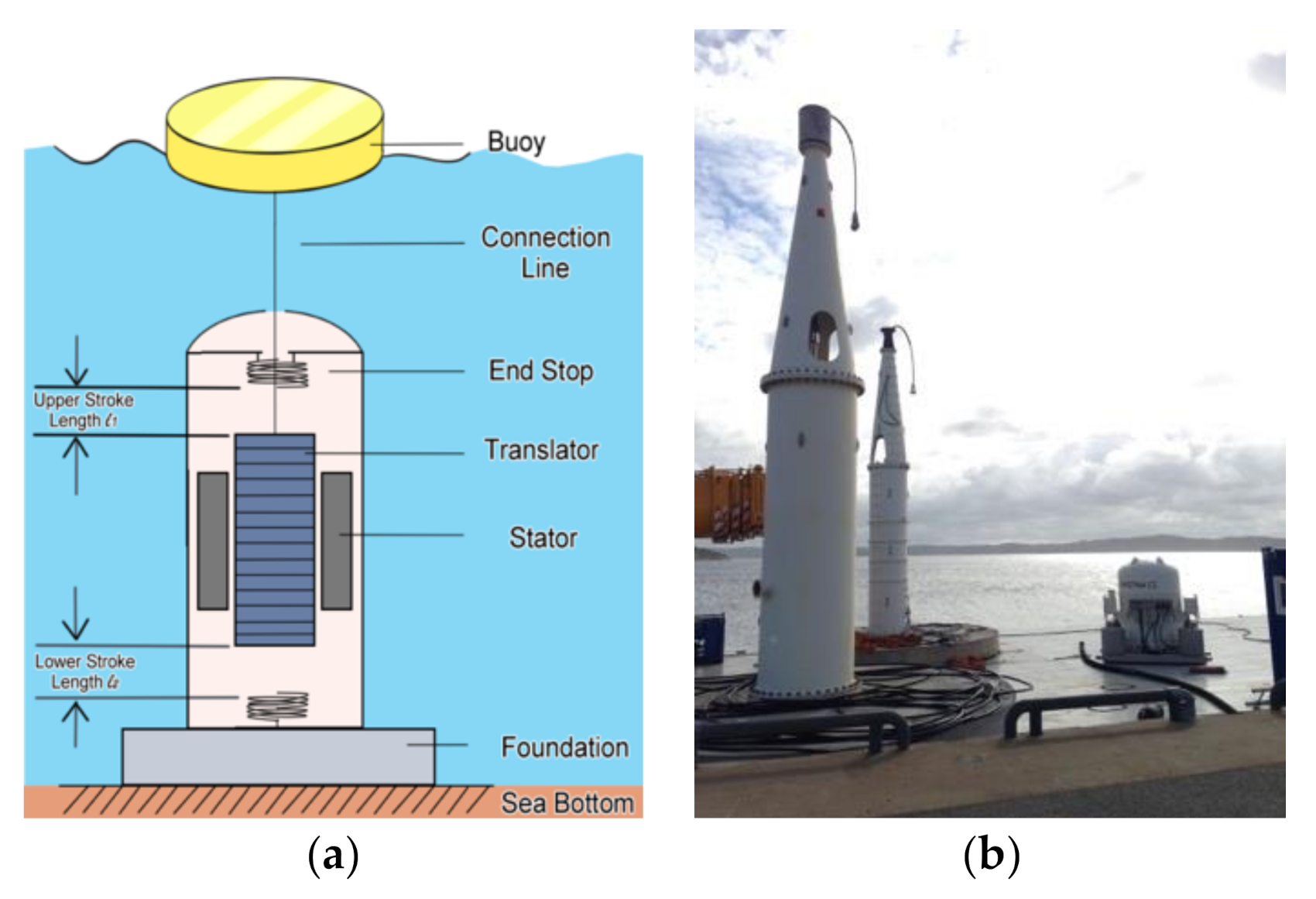
4.1. Wave Energy Converter (WEC) Model
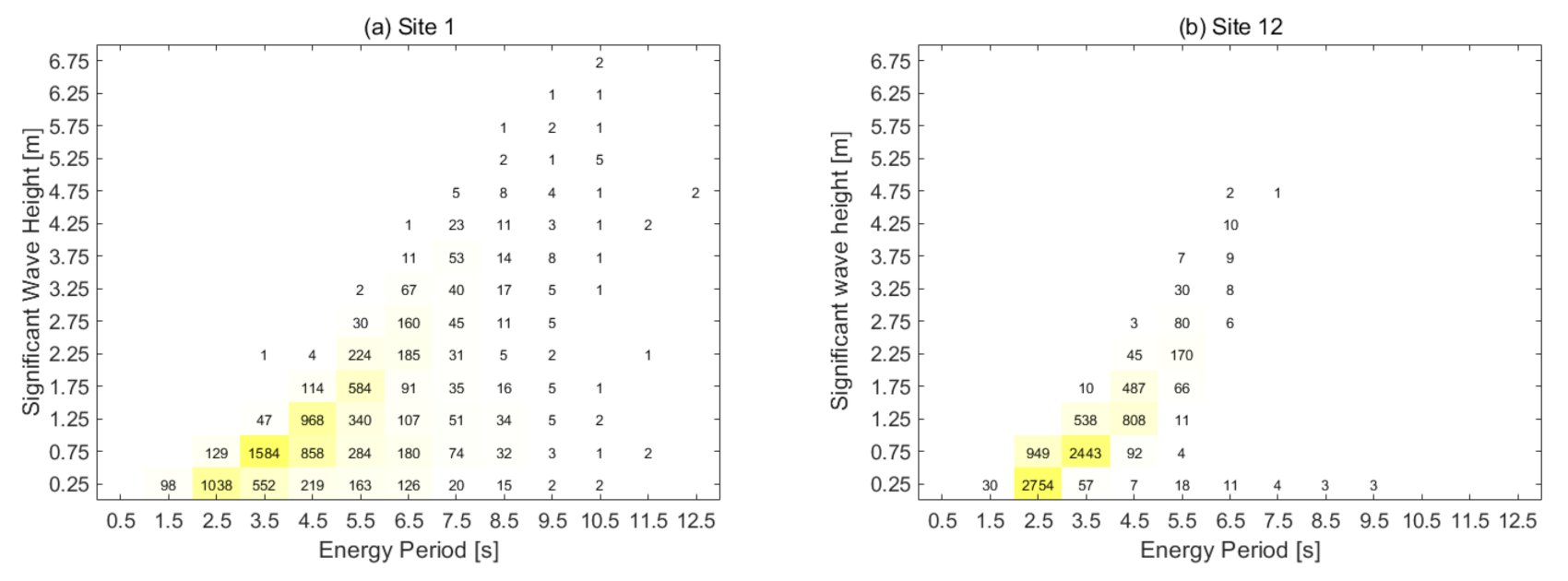
4.2. Wave Climates
4.3. Research Methods
5. Results and Discussion
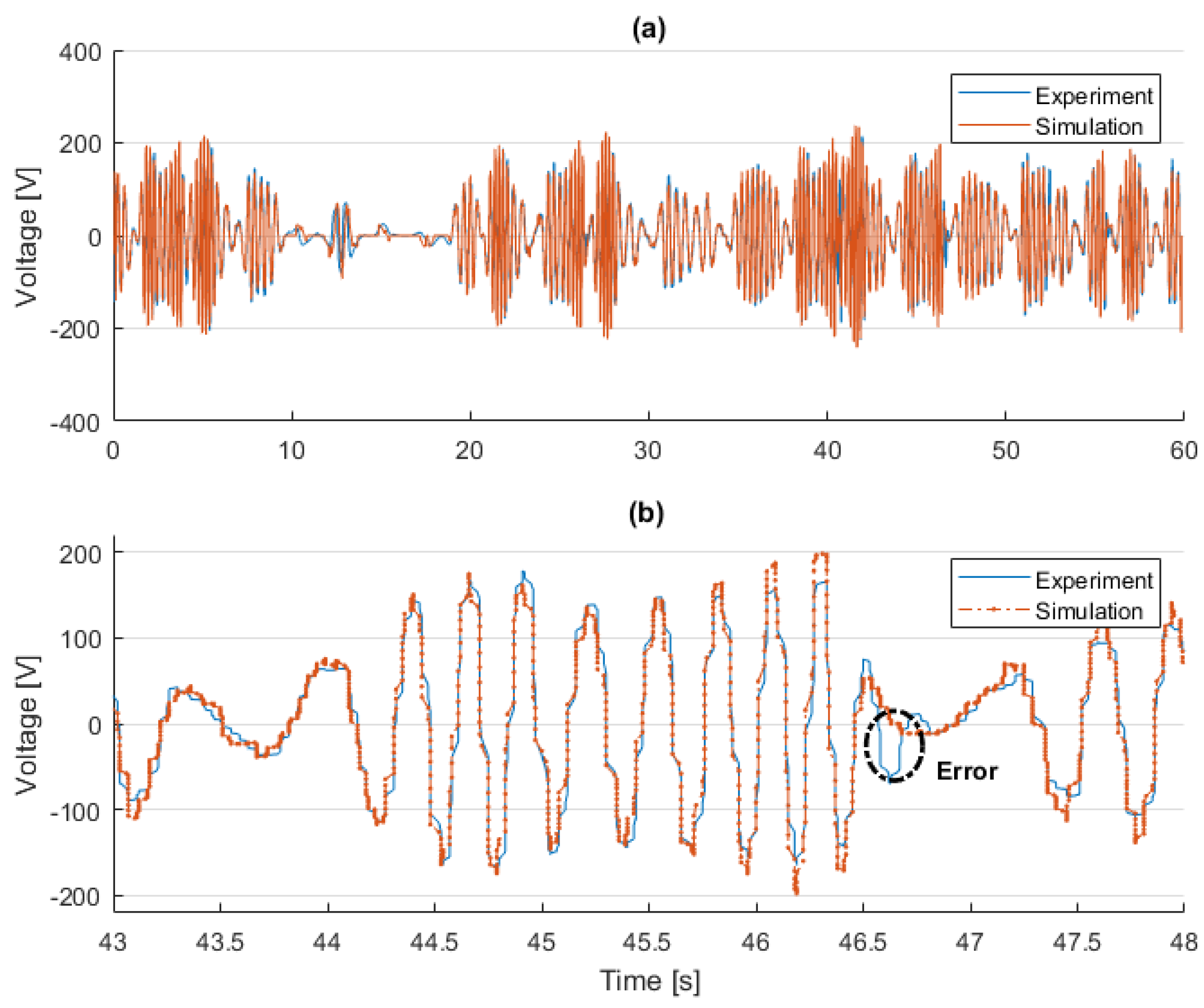
5.1. Model Verification
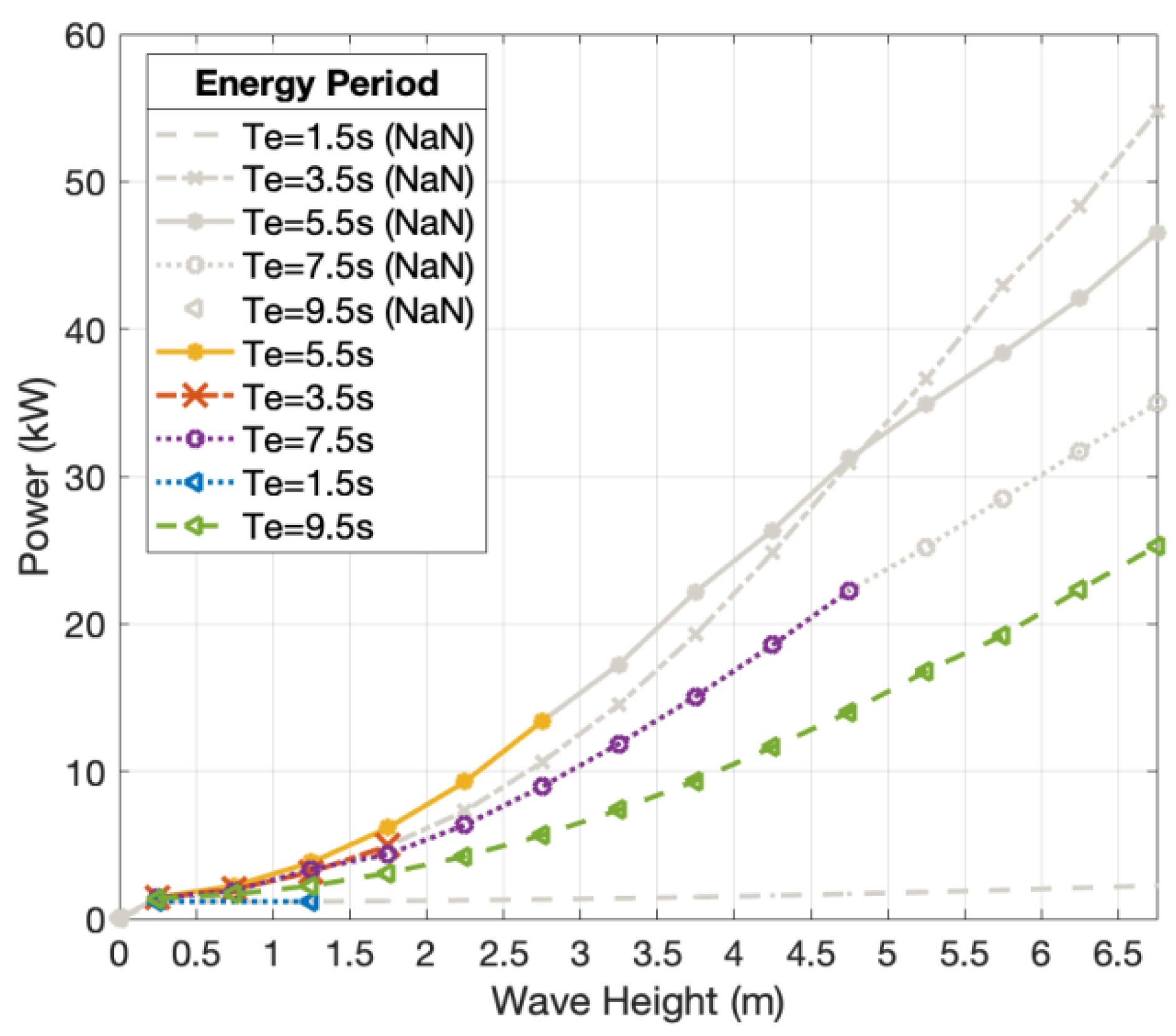
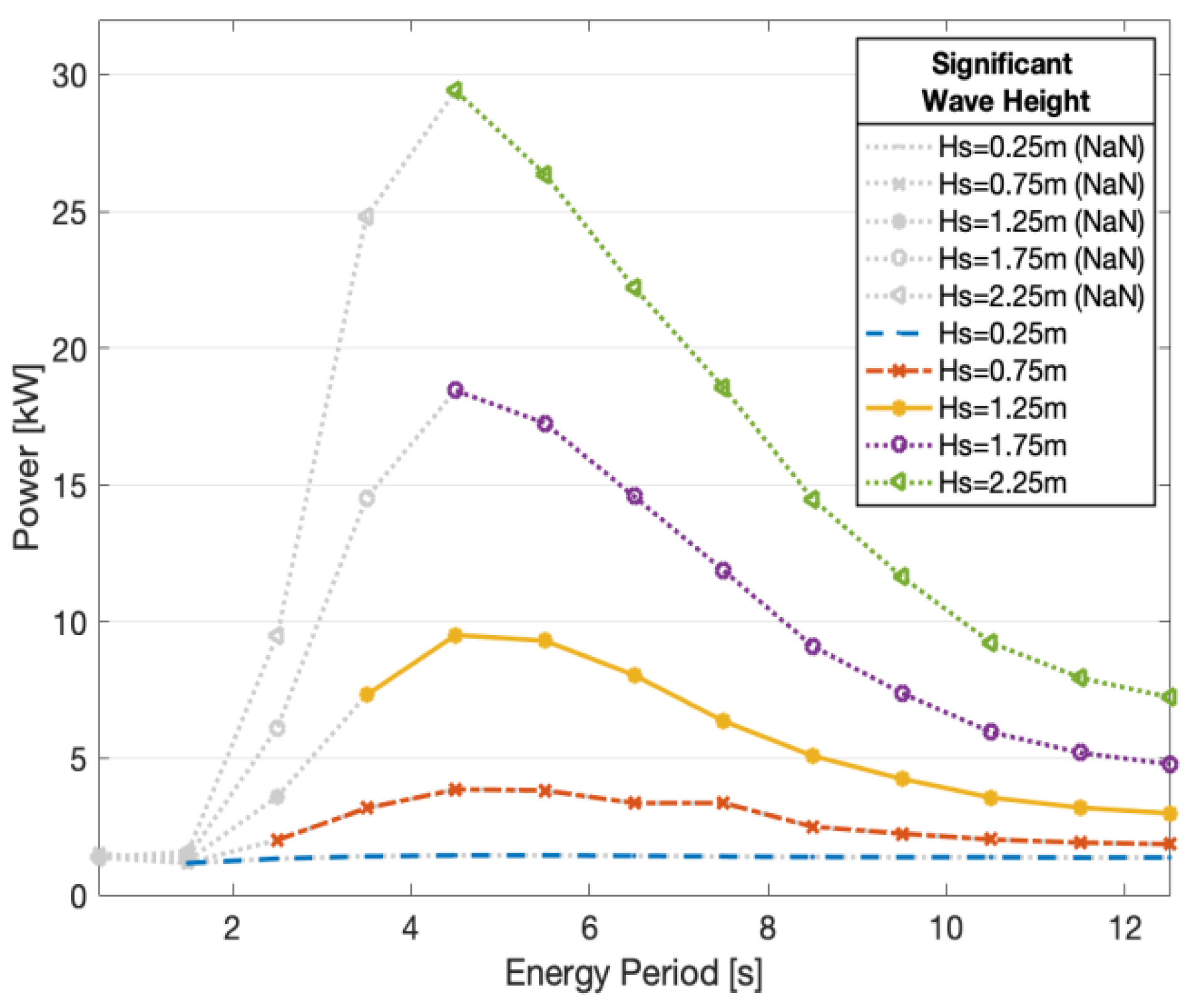
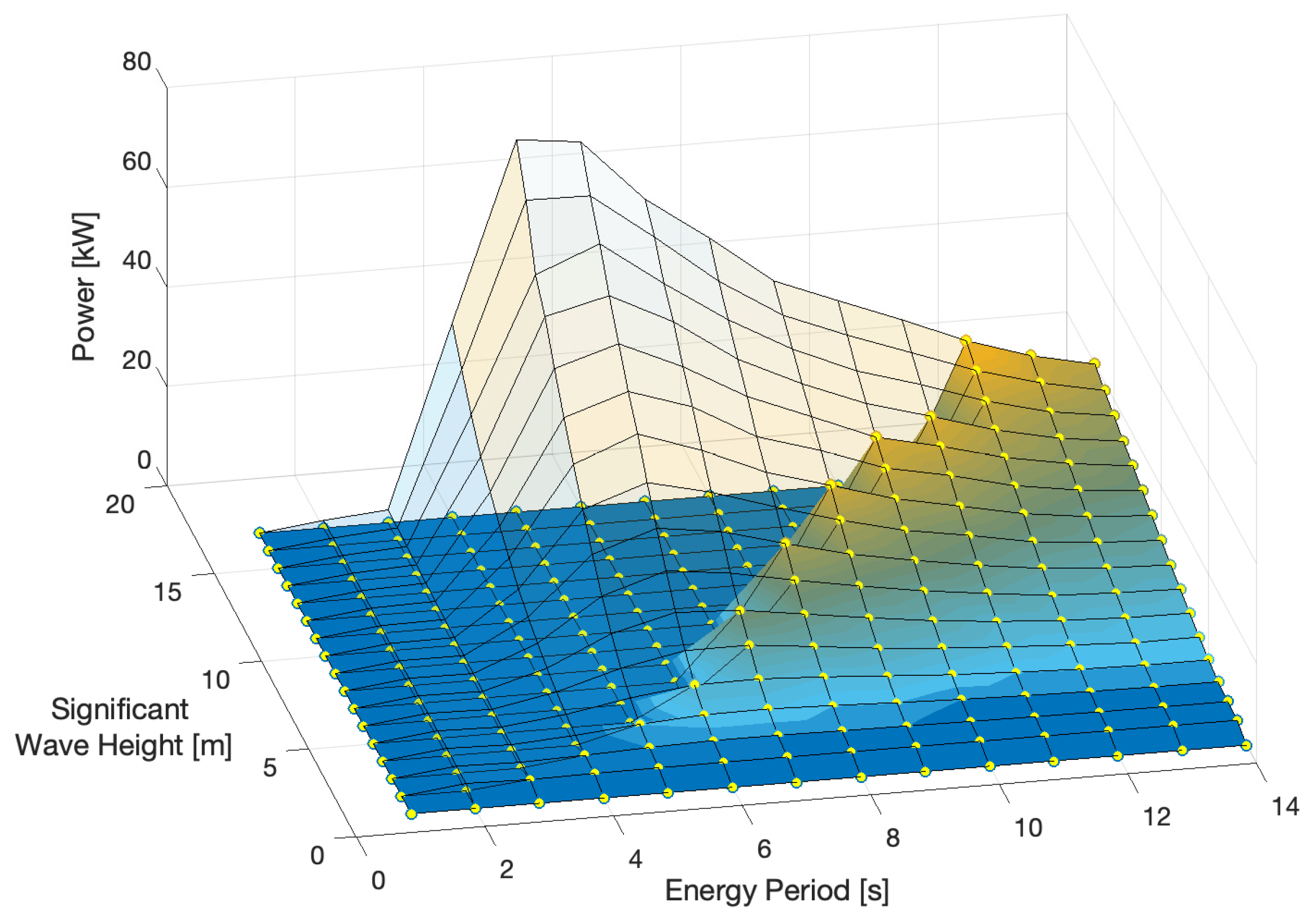
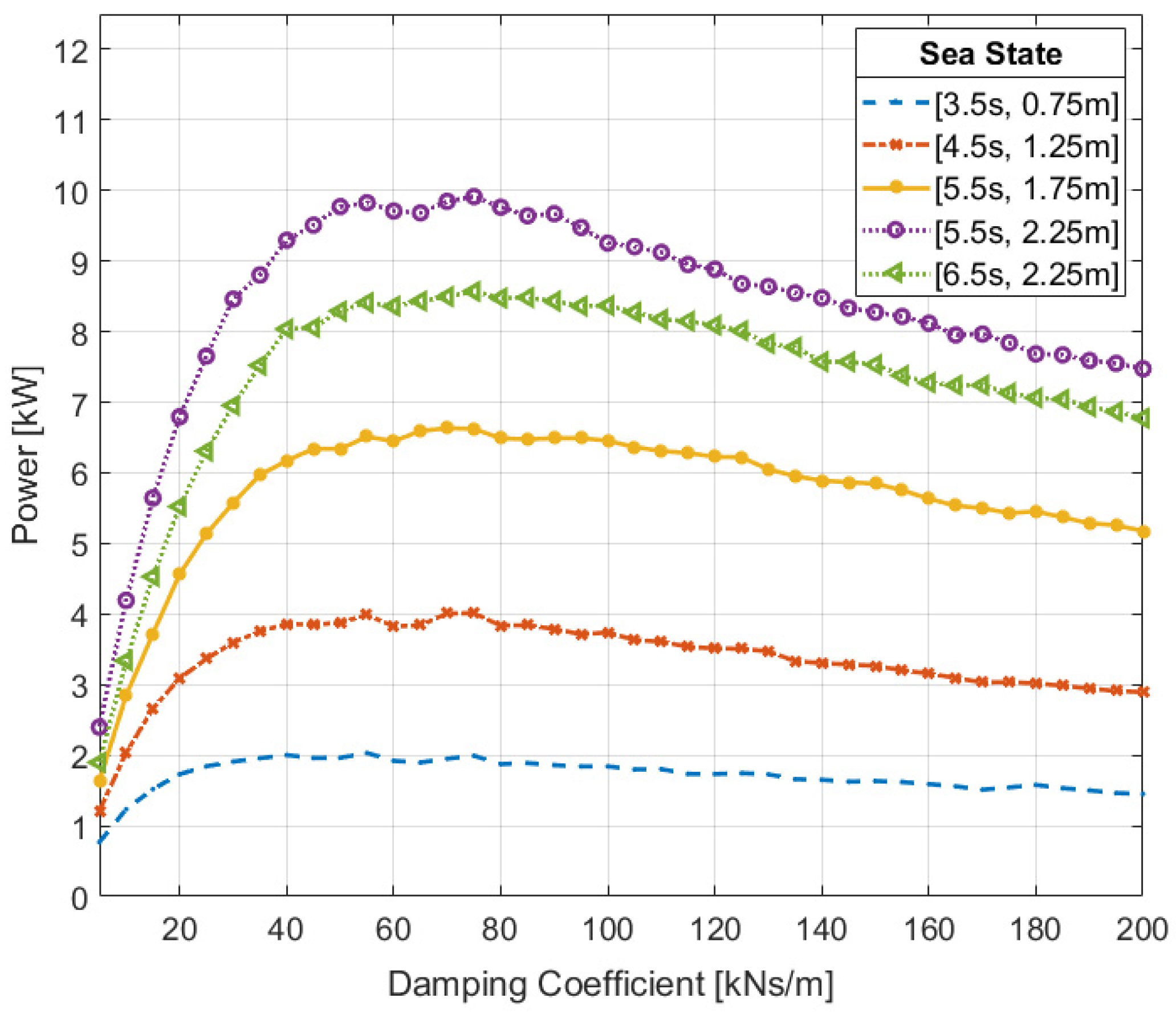
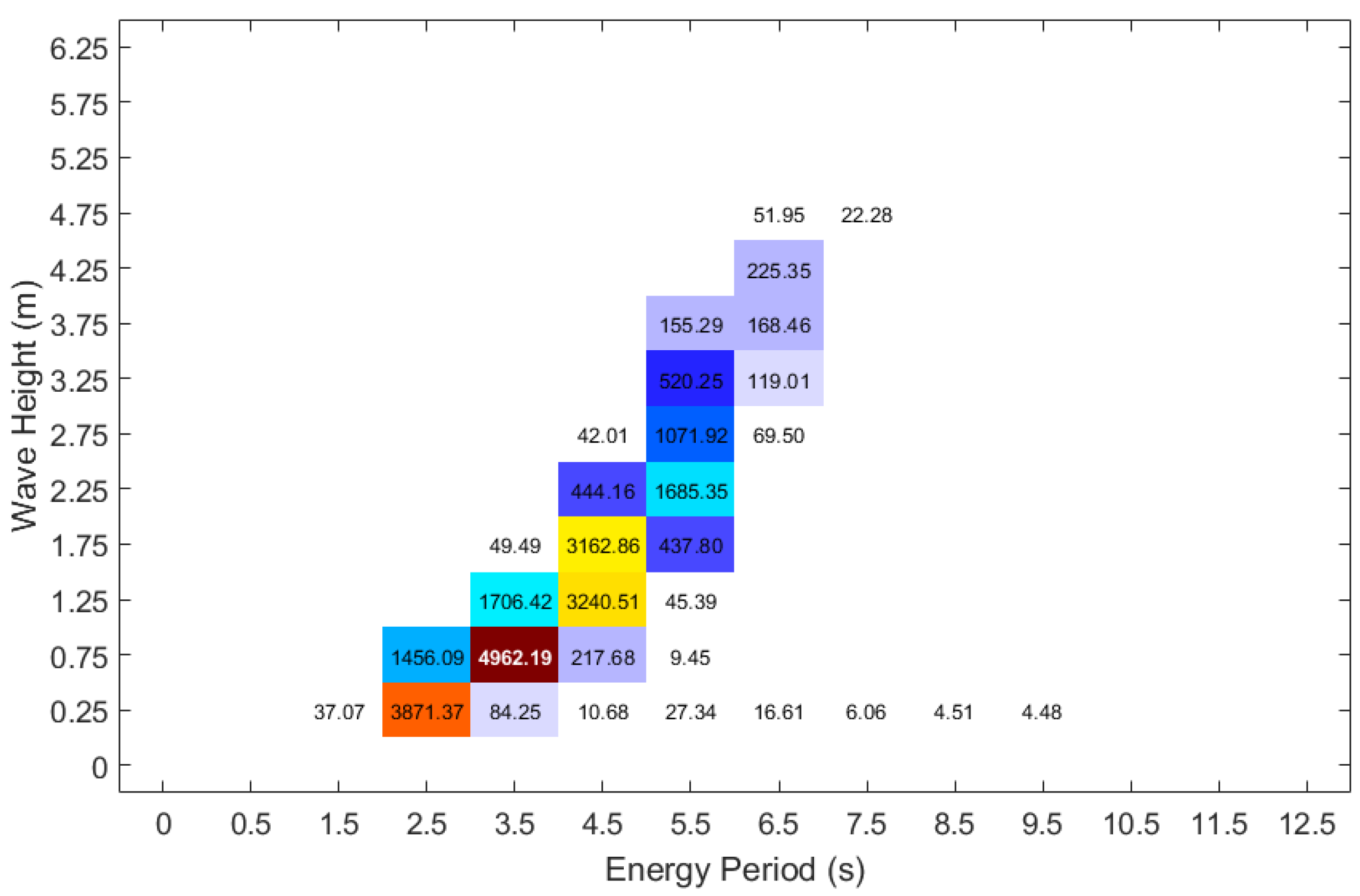
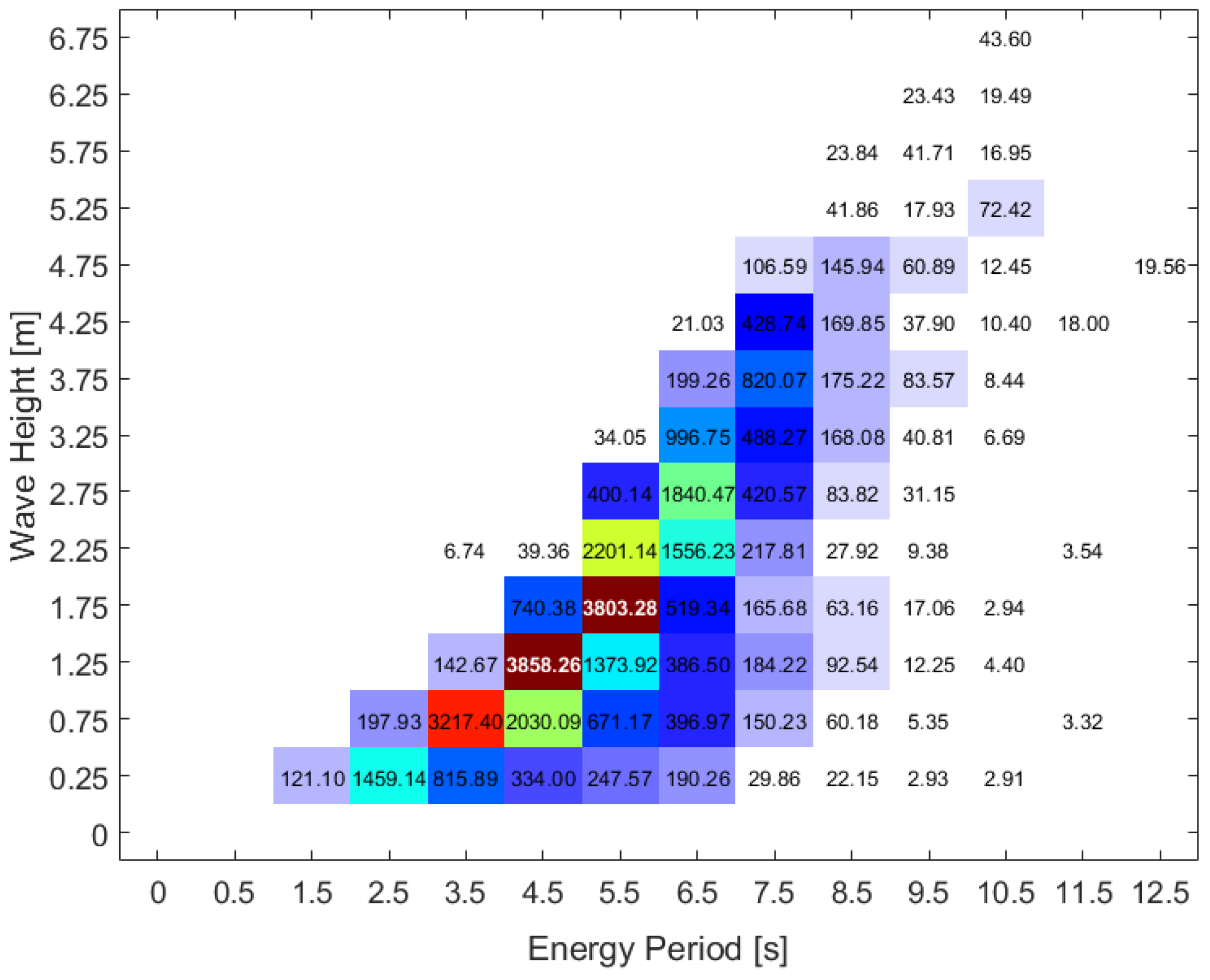
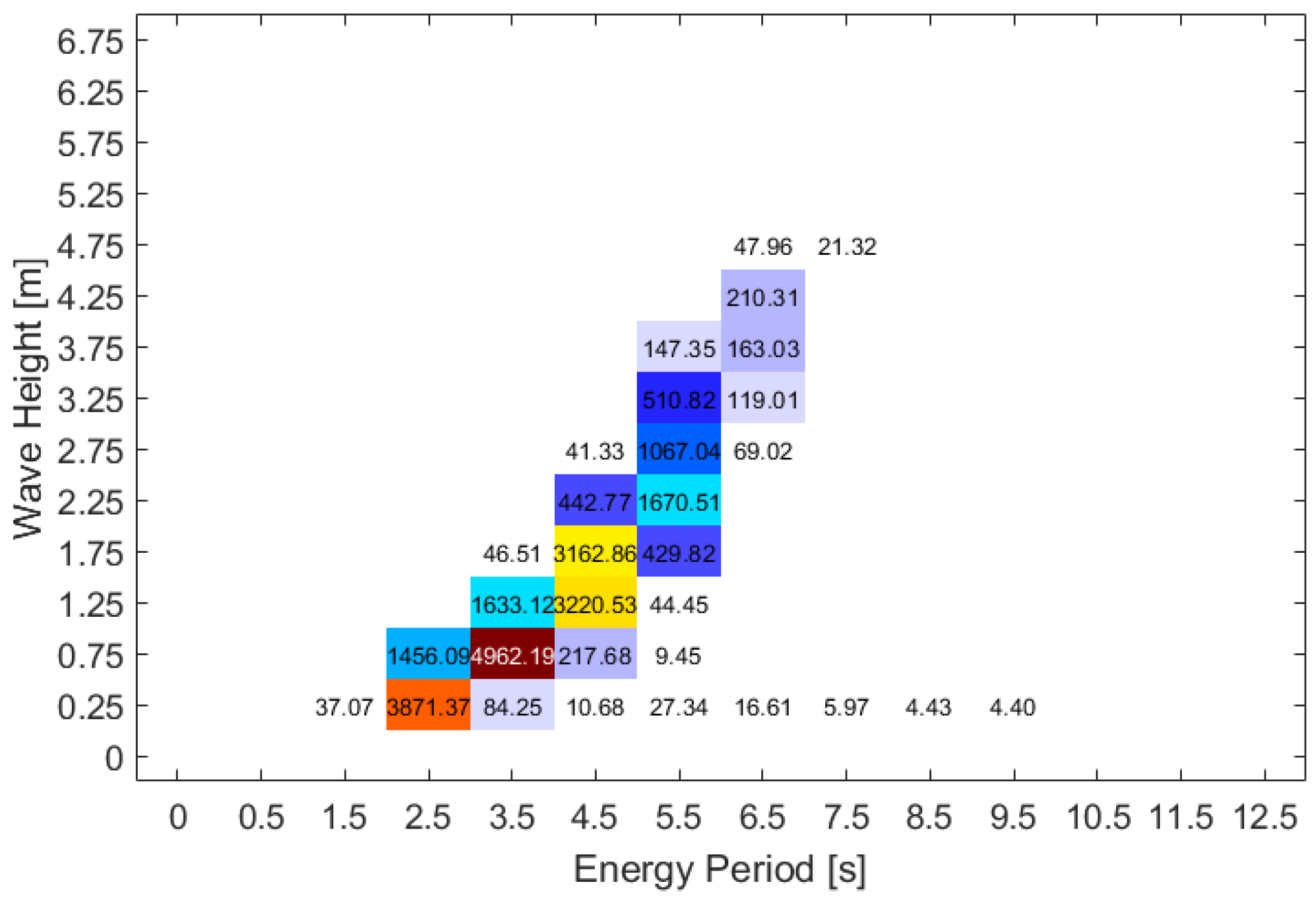
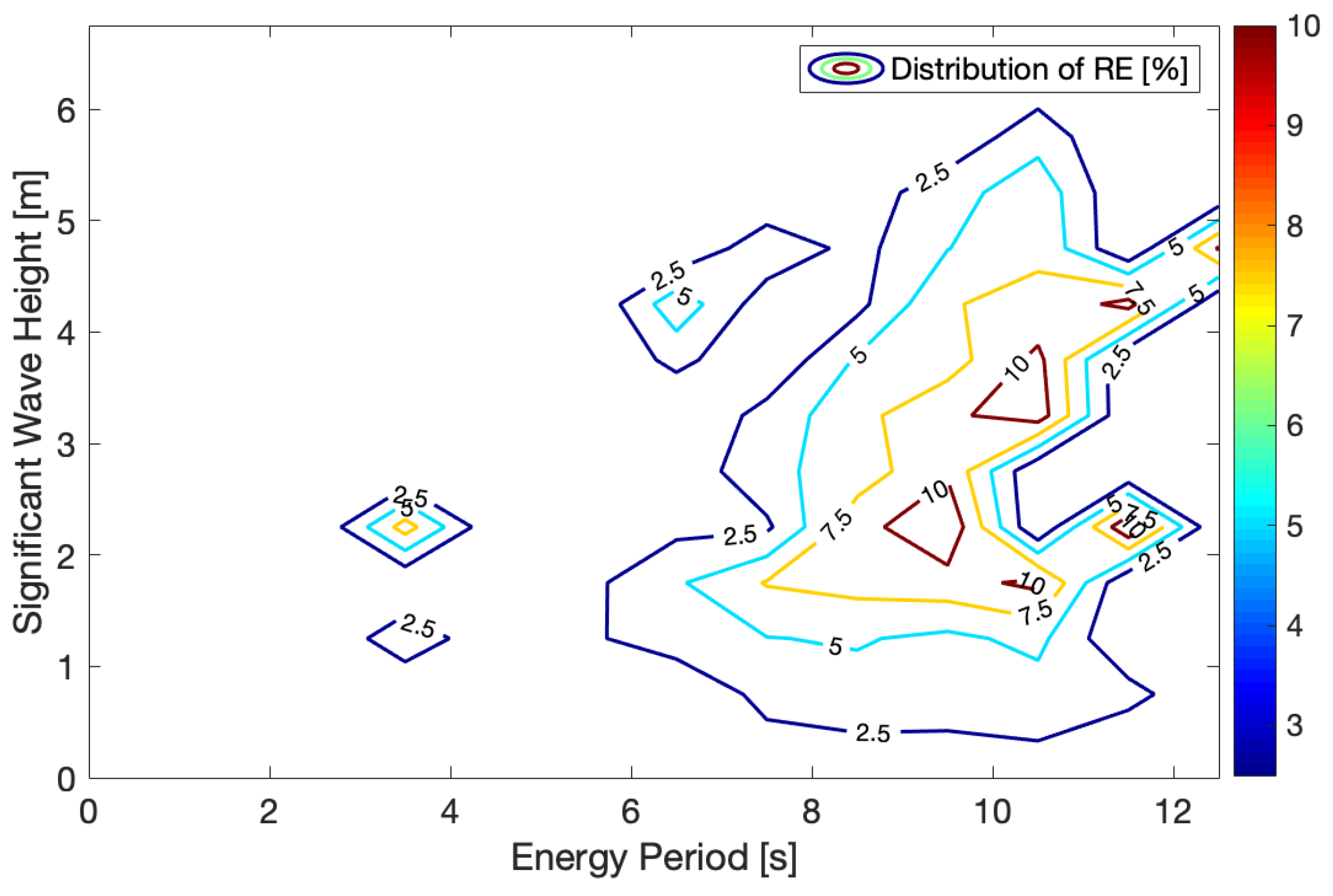
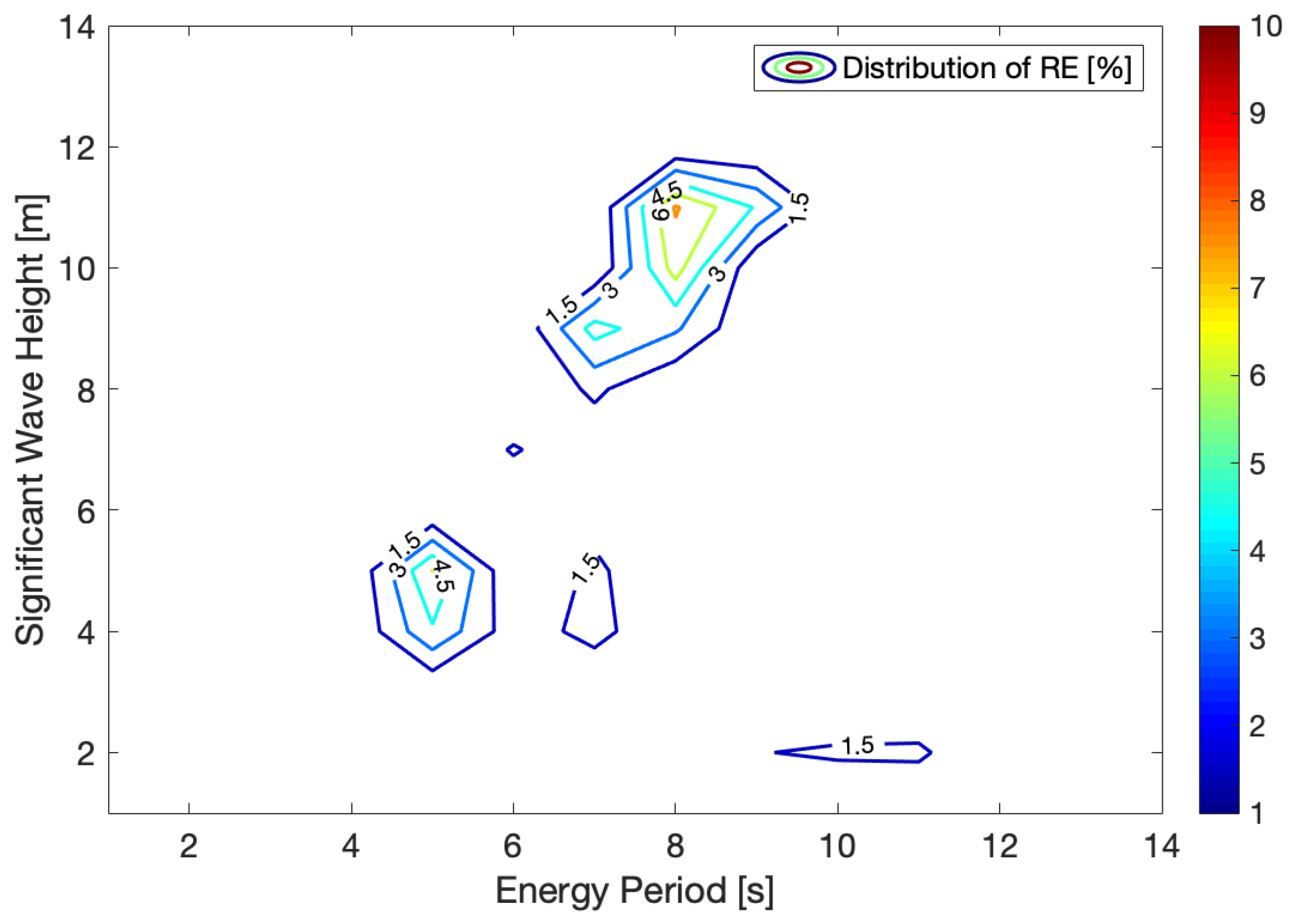
5.2. Generation and the Sea States
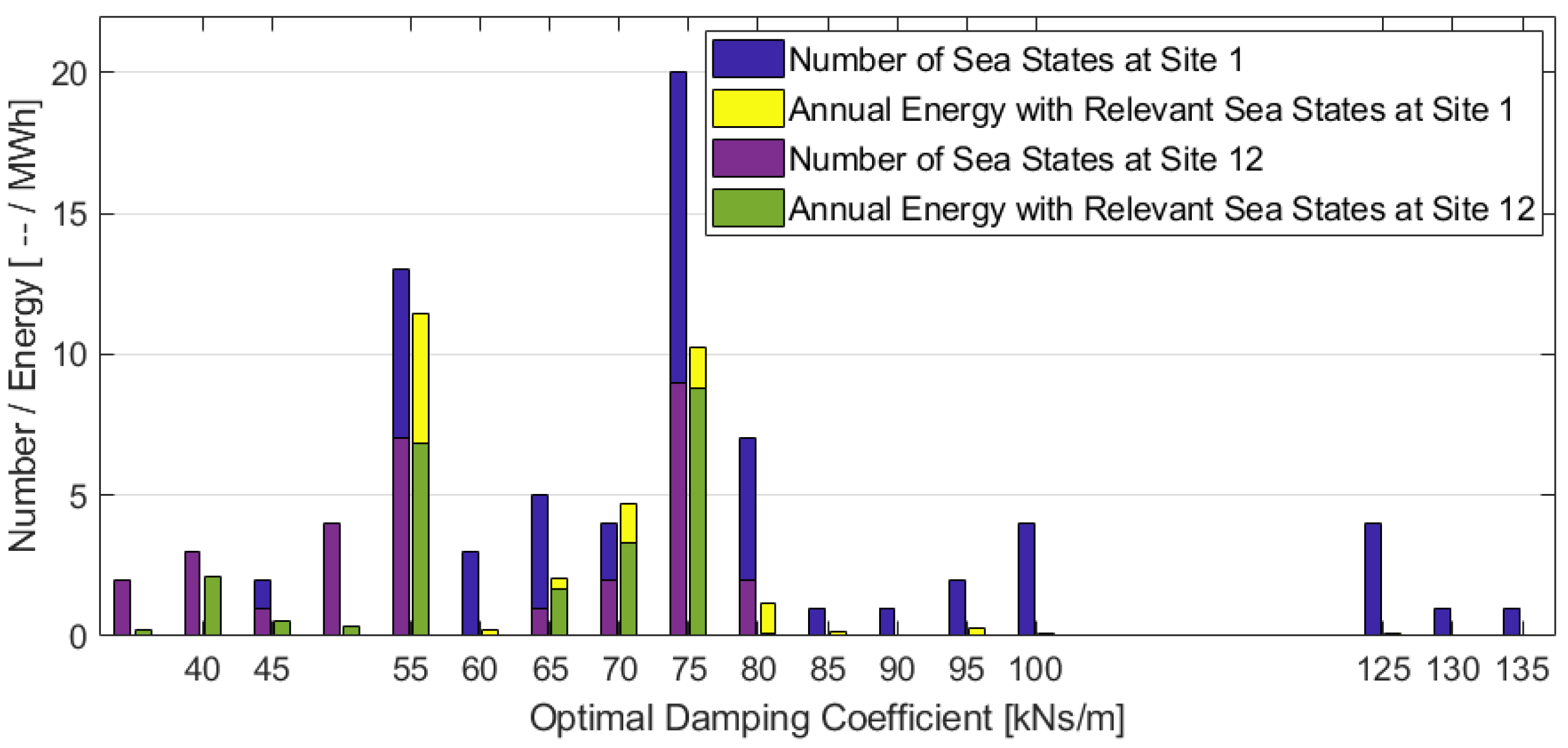
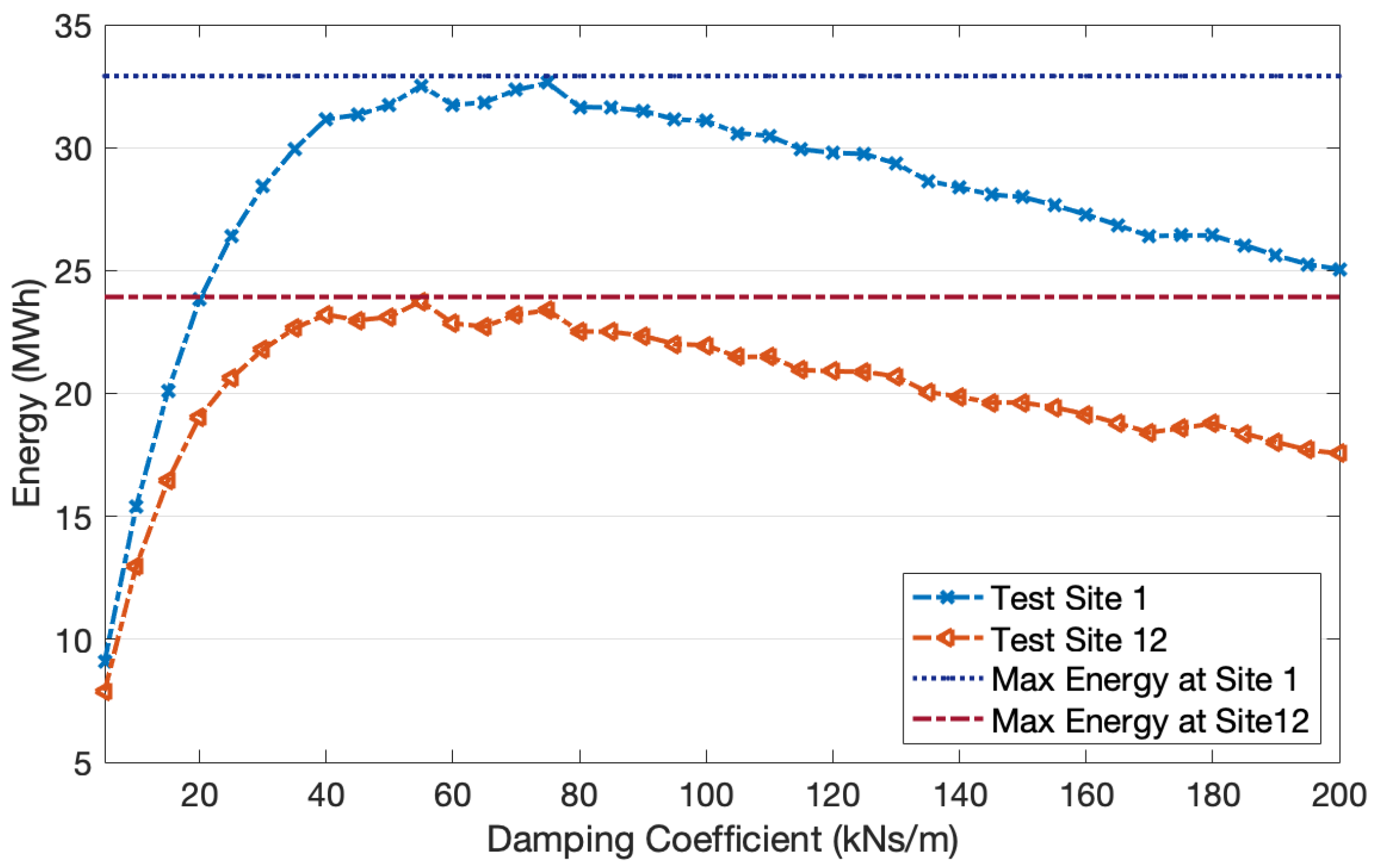
5.3. Damping Coefficient and Energy Production
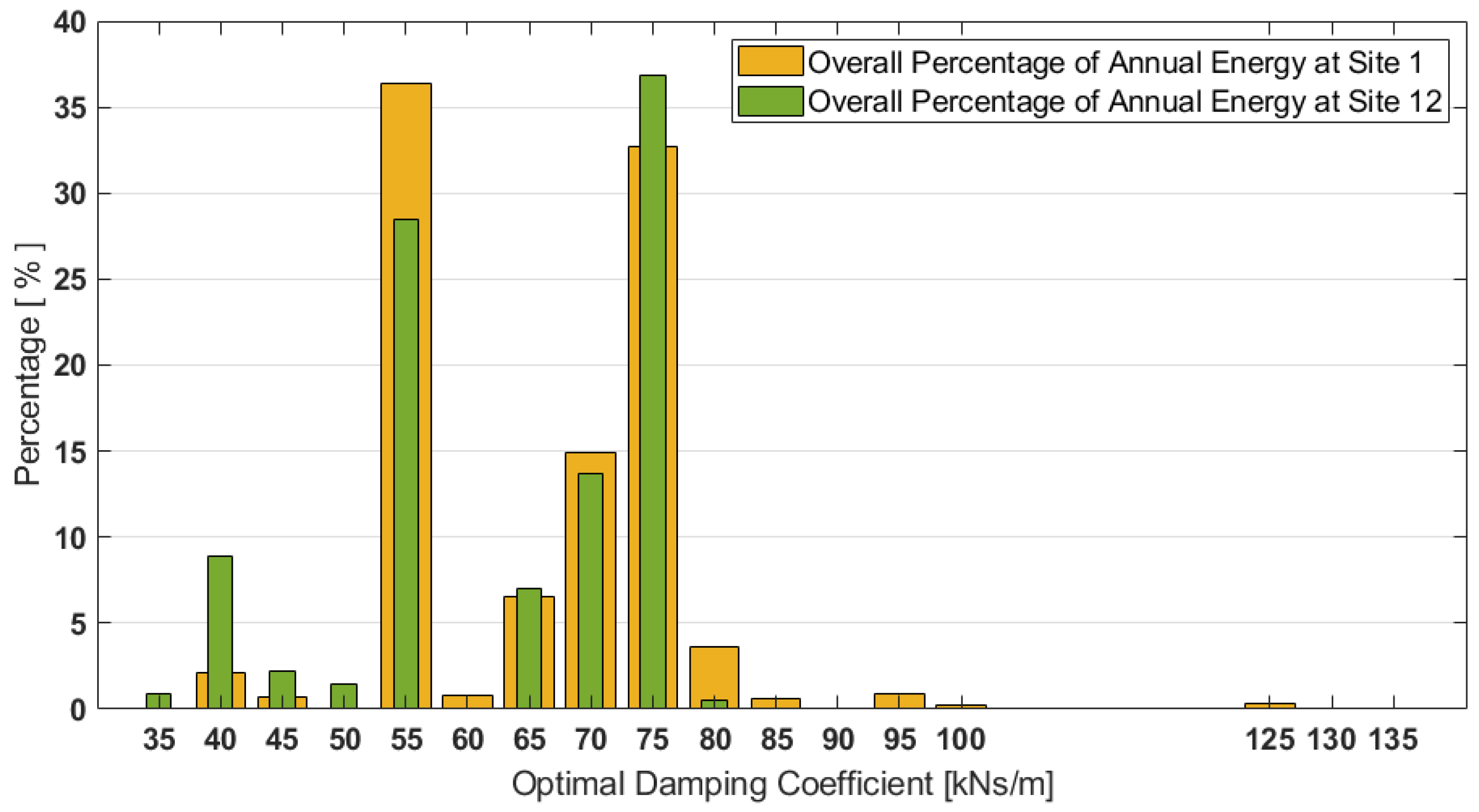
5.4. Optimal Damping Versus Constant Damping
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Girard, P. Pour Divers Moyens D’employr les Vagues de la mer, Comme Moteurs; Brevet D’invention De Quinze Ans: Paris, France, 1799. [Google Scholar]
- Mccormick, M.E. Ocean wave energy conversion. Renew. Energy 1970, 1, 1309–1319. [Google Scholar]
- Falcão, A.F.O. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar] [CrossRef]
- Astariz, S.; Iglesias, G. The economics of wave energy: A review. Renew. Sustain. Energy Rev. 2015, 45, 397–408. [Google Scholar] [CrossRef]
- Penalba, M.; Ringwood, J.V. A review of wave-to-wire models for wave energy converters. Energies 2016, 9, 506. [Google Scholar] [CrossRef]
- Ozkop, E.; Altas, I.H. Control, power and electrical components in wave energy conversion systems: A review of the technologies. Renew. Sustain. Energy Rev. 2017, 67, 106–115. [Google Scholar] [CrossRef]
- Nguyen, H.P.; Wang, C.M.; Tay, Z.Y.; Luong, V.H. Wave energy converter and large floating platform integration: A review. Ocean Eng. 2020, 213, 2–17. [Google Scholar] [CrossRef]
- Hong, Y.; Waters, R.; Boström, C. Review on electrical control strategies for wave energy converting systems. Renew. Sustain. Energy Rev. 2014, 31, 329–342. [Google Scholar] [CrossRef]
- Falnes, J. Ocean Waves and Oscillating Systems; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Mueller, M.; Baker, N.J. A low speed reciprocating permanent magnet generator for direct drive wave energy converters. In Proceedings of the International Conference on Power Electronics Machines and Drives, Bath, UK, 16–18 April 2002. [Google Scholar]
- Waters, R. Energy from Ocean Waves. Full Scale Experimental Verification of a Wave Energy Converter. Ph.D. Thesis, Uppsala University, Uppsala, Sweden, 2008. [Google Scholar]
- Hong, Y. Numerical Modelling and Mechanical Studies on a Point Absorber Type Wave Energy Converter. Ph.D. Thesis, Uppsala University, Uppsala, Sweden, 2017. [Google Scholar]
- Ekström, R.; Ekergård, B.; Leijon, M. Electrical damping of linear generators for wave energy converters—A review. Renew. Sustain. Energy Rev. 2015, 42, 116–128. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, X.; Shami, E.A.; Baker, N.J.; Ji, X. A study of a speed amplified linear generator for low-frequency wave energy conversion. Mech. Syst. Signal Process. 2021, 149, 1–18. [Google Scholar] [CrossRef]
- Wang, L.; Lin, M.; Tedeschi, E.; Engström, J.; Isberg, J. Improving electric power generation of a standalone wave energy converter via optimal electric load control. Energy 2020, 211, 1–9. [Google Scholar] [CrossRef]
- Teillant, B.; Gilloteaux, J.C.; Ringwood, J.V. Optimal damping profile for a heaving buoy wave energy converter. In Proceedings of the 8th IFAC Conference on Control Applications in Marine Systems, Rostock-Warnemünde, Germany, 15–17 September 2010. [Google Scholar]
- Son, D.; Yeung, R.W. Real-time implementation and validation of optimal damping control for a permanent-magnet linear generator in wave energy extraction. Appl. Energy 2017, 208, 571–579. [Google Scholar] [CrossRef]
- Zang, Z.; Zhang, Q.; Qi, Y.; Fu, X. Hydrodynamic responses and efficiency analyses of a heaving-buoy wave energy converter with PTO damping in regular and irregular waves. Renew. Energy 2018, 116, 527–542. [Google Scholar] [CrossRef]
- Zhao, X.; Ning, D.; Göteman, M.; Kang, H. Effect of the PTO damping force on the wave pressures on a 2-D wave energy converter. J. Hydrodyn. 2017, 29, 863–870. [Google Scholar] [CrossRef]
- Stålberg, M.; Waters, R.; Danielsson, O.; Leijon, M. Influence of generator damping on peak power and variance of power for a direct drive wave energy converter. J. Offshore Mech. Arct. Eng. 2008, 130, 1–4. [Google Scholar] [CrossRef]
- Eriksson, M.; Isberg, J.; Leijon, M. Hydrodynamic modeling of a direct drive wave energy converter. Int. J. Eng. Sci. 2005, 43, 1377–1387. [Google Scholar] [CrossRef]
- Pecher, A.; Kofoed, J. Handbook of Ocean Wave Energy; Springer Nature: Cham, Switzerland, 2017. [Google Scholar]
- Waters, R.; Stalberg, M.; Danielsson, O. Experimental results from sea trials of an offshore wave energy system. Appl. Phys. Lett. 2007, 90, 1–3. [Google Scholar] [CrossRef]
- Rodríguez, C.A.; Rosa-Santos, P.; Taveira-Pinto, F. Assessment of damping coefficients of power take-off systems of wave energy converters: A hybrid approach. Energy 2019, 169, 1022–1038. [Google Scholar] [CrossRef]
- Duclos, G.; Babarit, A.; Clément, A.H. Optimizing the power take off of a wave energy converter with regard to the wave Climate. J. Offshore Mech. Arct. Eng. 2005, 128, 56–64. [Google Scholar] [CrossRef]
- Edwards, S.J.; Coe, R.G. The effect of environmental contour selection on expected wave energy converter response. J. Offshore Mech. Arct. Eng. 2018, 141, 1–7. [Google Scholar] [CrossRef]
- Hong, Y.; Eriksson, M.; Boström, C.; Pan, J.; Liu, Y.; Waters, R. Damping effect coupled with the internal translator mass of linear generator-based wave energy converters. Energies 2020, 13, 4424. [Google Scholar] [CrossRef]
- Li, W.; Isberg, J.; Waters, R.; Engström, J.; Svensson, O.; Leijon, M. Statistical analysis of wave climate data using mixed distributions and extreme wave prediction. Energies 2016, 9, 396. [Google Scholar] [CrossRef]
- Temiz, I.; Leijon, J.; Ekergård, B.; Boström, C. Economic aspects of latching control for a wave energy converter with a direct drive linear generator power take-off. Renew. Energy 2018, 128, 57–67. [Google Scholar] [CrossRef]
- Lejerskog, E.; Boström, C.; Savin, A. Lysekil research site, Sweden: Status update. In Proceedings of the European Wave and Tidal Energy Conference 2011, Southampton, UK, 5–9 September 2011. [Google Scholar]
- Hong, Y.; Hultman, E.; Castellucci, V. Status update of the wave energy research at Uppsala University. In Proceedings of the European Wave and Tidal Conference 2013, Aalborg, Denmark, 2–5 September 2013. [Google Scholar]
- Parwal, A.; Remouit, F.; Hong, Y. Wave energy research at Uppsala University and the Lysekil research site, Sweden: A status update. In Proceedings of the European Wave and Tidal Energy Conference 2015, Nantes, France, 6–11 September 2015. [Google Scholar]
- Stålberg, M.; Waters, R.; Eriksson, M. Full-scale testing of PM linear generator for point absorber WEC. In Proceedings of the European Wave and Tidal Conference, Glasgow, UK, 29 August–2 September 2005. [Google Scholar]
- Chatzigiannakou, M.A.; Ulvgård, L.; Temiz, I.; Leijon, M. Offshore deployments of wave energy converters by Uppsala University. Sweden. Mar. Syst. Ocean Technol. 2019, 14, 67–74. [Google Scholar] [CrossRef]
- Boström, C. Electrical Systems for Wave Energy Conversion. Ph.D. Thesis, Uppsala University, Uppsala, Sweden, 2011. [Google Scholar]
- Hong, Y.; Eriksson, M.; Boström, C. Impact of generator stroke length on energy production for a direct drive wave energy converter. Energies 2016, 9, 730. [Google Scholar] [CrossRef]
- Hong, Y.; Eriksson, M.; Castellucci, V. Linear generator-based wave energy converter model with experimental verification and three loading strategies. IET Renew. Power Gener. 2016, 10, 349–359. [Google Scholar] [CrossRef]
- Waters, R.; Engström, J.; Isberg, J. Wave climate off the Swedish west coast. Renew. Energy 2009, 34, 1600–1606. [Google Scholar] [CrossRef]
- Boldea, I.; Nasar, S. Linear Electric Actuators and Generators; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Wornom, S.F.; Welsh, D.J.S.; Bedford, K.W. On coupling the SWAN and WAM wave models for accurate nearshore wave predictions. Coast. Eng. J. 2001, 43, 161–201. [Google Scholar] [CrossRef]
- Bretschneider, C.L. On Wind Generated Waves, Topics in Ocean Engineering; Gulf Publishing: Houston, TX, USA, 2006. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Generator resistance, [Ω] | |
| Generator inductance, [mH] | 20 |
| Vertical stator length, [mm] | 2 |
| Vertical translator length, [mm] | 2 |
| Airgap, [mm] | 3 |
| Translator weight, [kg] | 5000 |
| Buoy diameter, D [m] | 4 |
| Buoy mass, [kg] | 6300 |
| Analysis | Value |
|---|---|
| Simulated average power, [kW] | 19.06 |
| Experimental average power, [kW] | 19.51 |
| Percentage error on the average power, [%] | 2.33 |
| Standard deviation on average power, [kW] | 0.46 |
| Standard deviation on phase voltage, [V] | 16.41 |
| Site 1 | Wave Period [s] | Wave Height [m] | Annual Energy [MWh] | Percentage 1 [%] |
|---|---|---|---|---|
| 1 | 4.5 | 1.25 | 3.88 | 11.80 |
| 2 | 5.5 | 1.75 | 3.87 | 11.77 |
| 3 | 3.5 | 0.75 | 3.22 | 9.78 |
| 4 | 5.5 | 2.25 | 2.22 | 6.75 |
| 5 | 4.5 | 0.75 | 2.03 | 6.17 |
| 6 | 6.5 | 2.75 | 1.85 | 5.63 |
| Site 12 | Wave Period [s] | Wave Height [m] | Annual Energy [MWh] | Percentage 1 [%] |
|---|---|---|---|---|
| 1 | 3.5 | 0.75 | 4.96 | 20.74 |
| 2 | 2.5 | 0.25 | 3.87 | 16.18 |
| 3 | 4.5 | 1.25 | 3.24 | 13.54 |
| 4 | 4.5 | 1.75 | 3.16 | 13.22 |
| 5 | 3.5 | 1.25 | 1.71 | 7.13 |
| 6 | 5.5 | 2.25 | 1.69 | 7.04 |
| Site 1 | Damping Coefficient [kNs/m] | Sea States [-] | Energy [MWh] | Percentage 1 [%] |
|---|---|---|---|---|
| 1 | 55 | 13 | 11.42 | 36.40 |
| 2 | 75 | 20 | 10.25 | 32.69 |
| 3 | 70 | 4 | 4.68 | 14.93 |
| 4 | 65 | 5 | 2.06 | 6.56 |
| Site 12 | Damping Coefficient [kNs/m] | Sea States [-] | Energy [MWh] | Percentage 1 [%] |
|---|---|---|---|---|
| 1 | 75 | 9 | 8.82 | 36.87 |
| 2 | 55 | 7 | 6.81 | 28.46 |
| 3 | 70 | 2 | 3.29 | 13.73 |
| 4 | 40 | 3 | 2.13 | 8.88 |
| Site 1 | Damping Coefficient [kNs/m] | Overall Energy under 75 [MWh] | Overall Energy Under Optimal [MWh] | Percentage 1 [%] |
|---|---|---|---|---|
| Site 1 | 75 | 32.63 | 32.91 | 0.8 |
| Site 12 | 55 | 23.76 | 23.93 | 0.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, Y.; Temiz, I.; Pan, J.; Eriksson, M.; Boström, C. Damping Studies on PMLG-Based Wave Energy Converter under Oceanic Wave Climates. Energies 2021, 14, 920. https://doi.org/10.3390/en14040920
Hong Y, Temiz I, Pan J, Eriksson M, Boström C. Damping Studies on PMLG-Based Wave Energy Converter under Oceanic Wave Climates. Energies. 2021; 14(4):920. https://doi.org/10.3390/en14040920
Chicago/Turabian StyleHong, Yue, Irina Temiz, Jianfei Pan, Mikael Eriksson, and Cecilia Boström. 2021. "Damping Studies on PMLG-Based Wave Energy Converter under Oceanic Wave Climates" Energies 14, no. 4: 920. https://doi.org/10.3390/en14040920
APA StyleHong, Y., Temiz, I., Pan, J., Eriksson, M., & Boström, C. (2021). Damping Studies on PMLG-Based Wave Energy Converter under Oceanic Wave Climates. Energies, 14(4), 920. https://doi.org/10.3390/en14040920