An Ultra-Efficient Lightweight Electric Vehicle—Power Demand Analysis to Enable Lightweight Construction



Abstract
1. Introduction
2. Vehicle Architecture
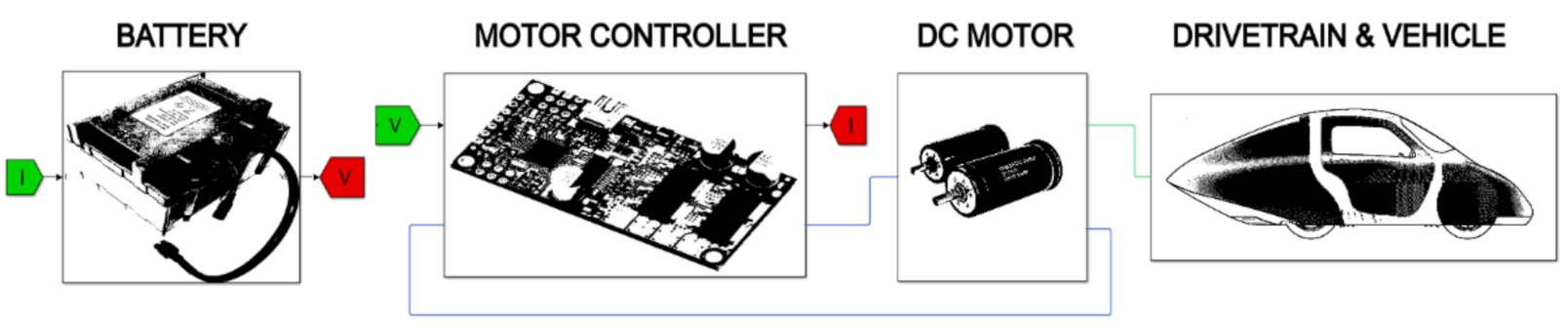
3. Multiphysics Model
- evaluate the energy consumption of the vehicle;
- assess the influence of the design parameters on the energy consumption;
- simulate different race strategies and find the optimal one that minimizes the energy consumption.
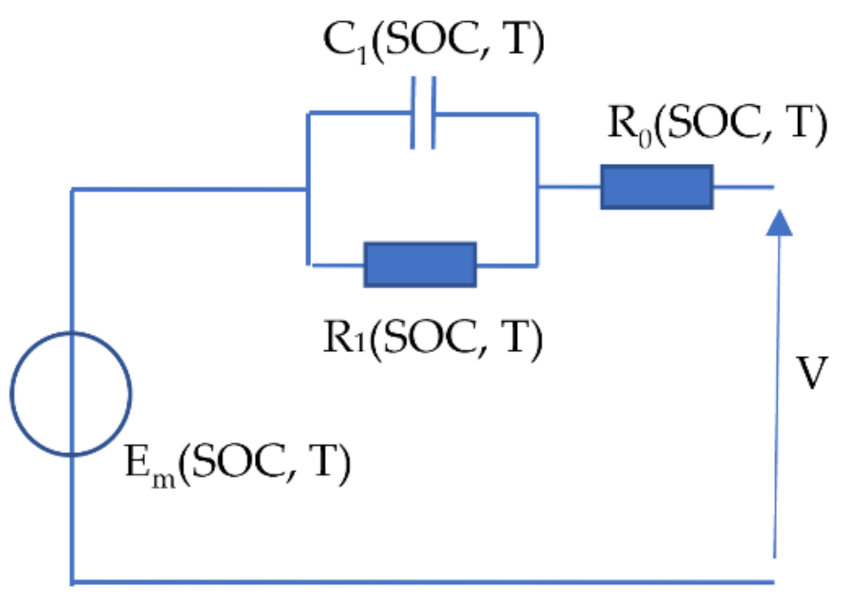
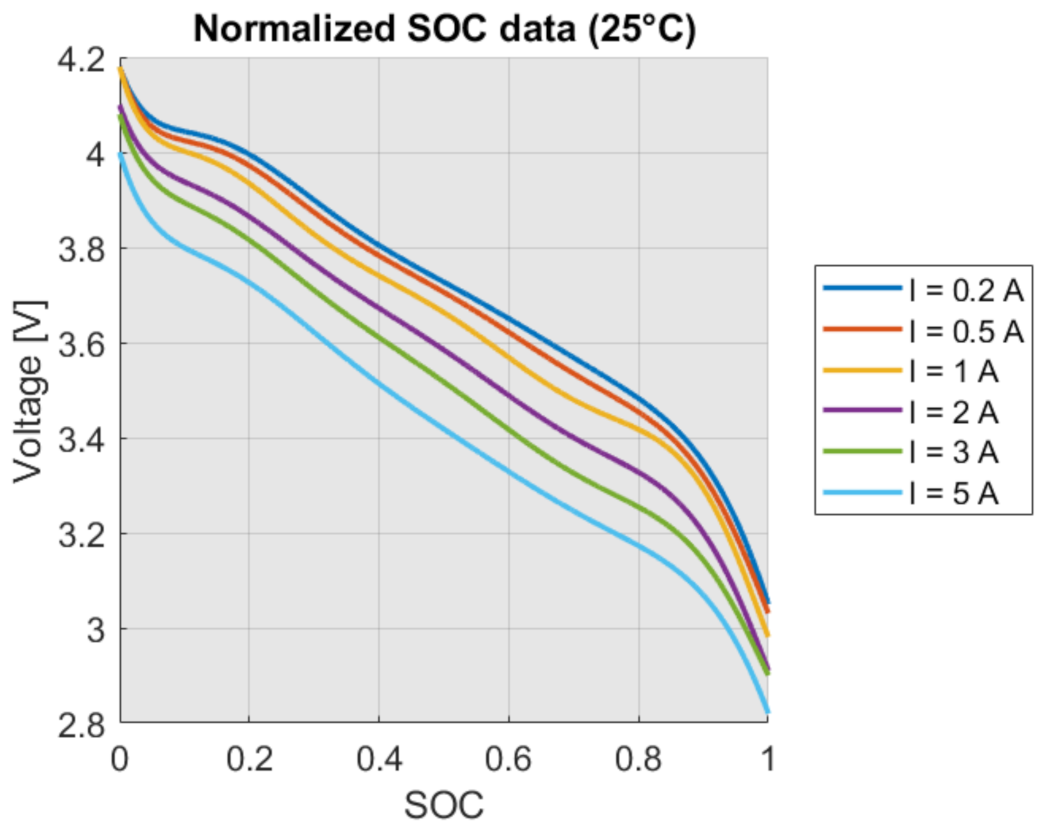
3.1. Battery Model
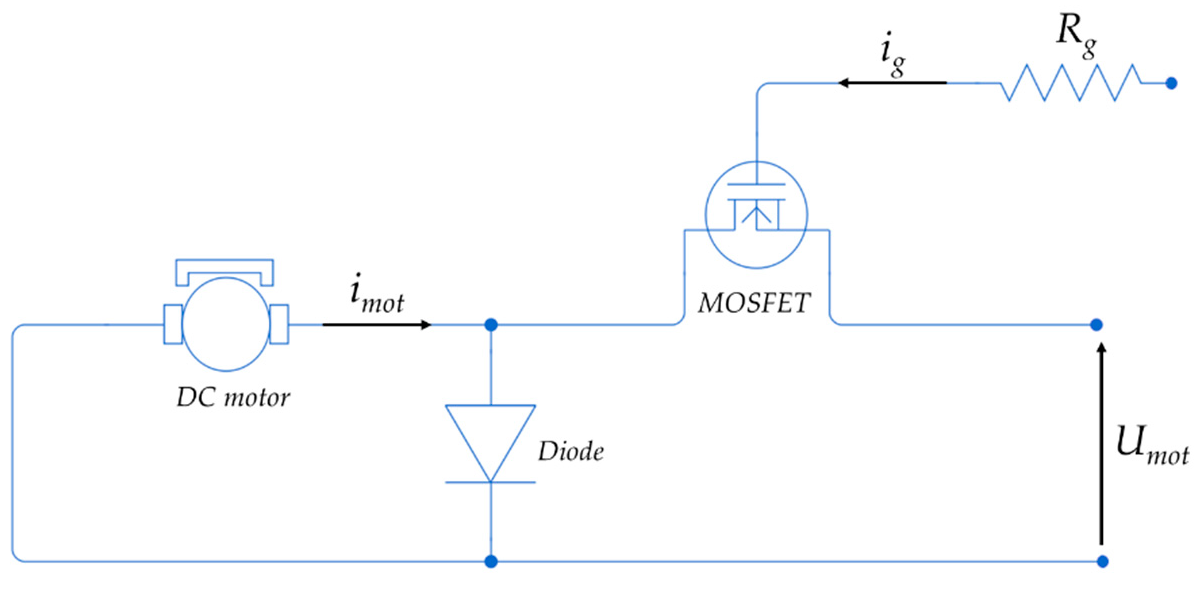
3.2. Motor Controller
3.3. DC Motor Model
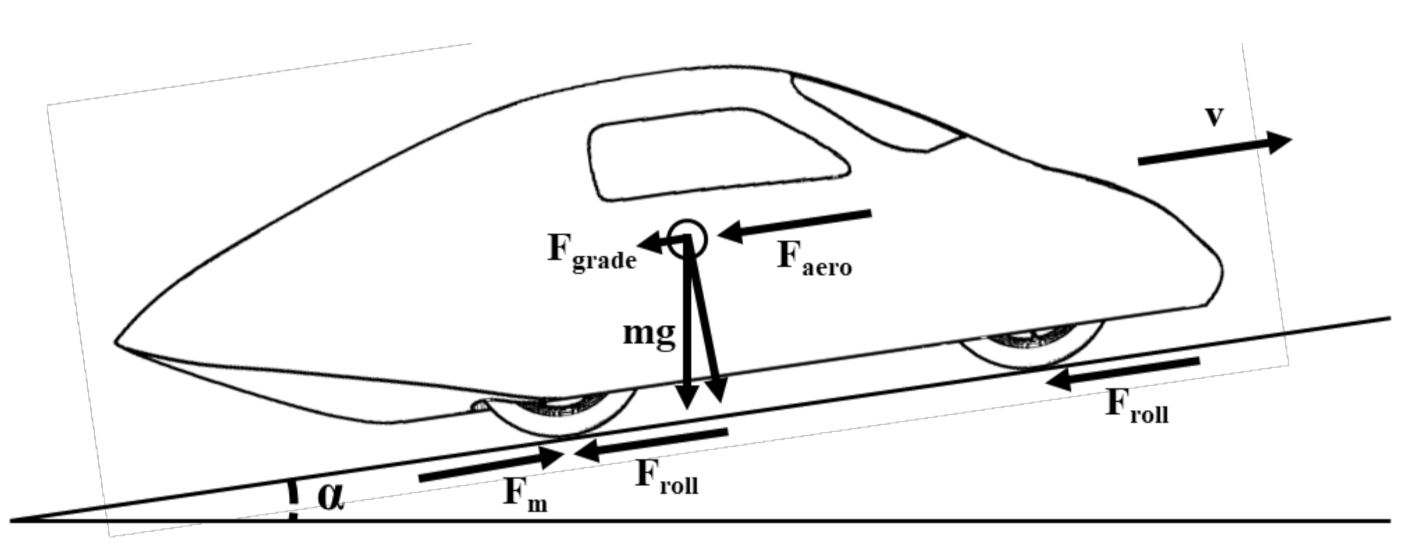
3.4. Drivetrain and Vehicle Model
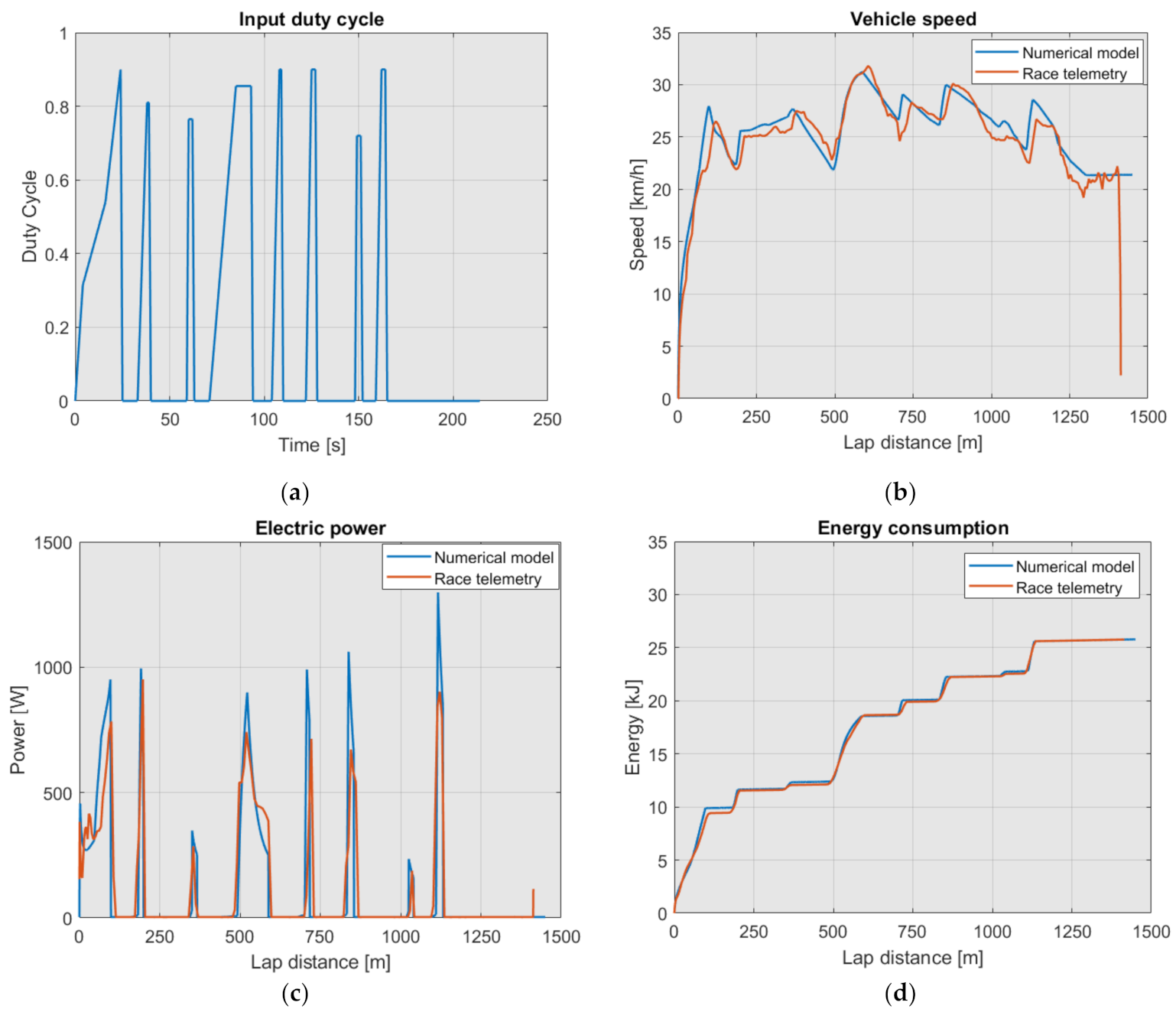
3.5. Preliminary Validation
4. Sensitivity Analysis
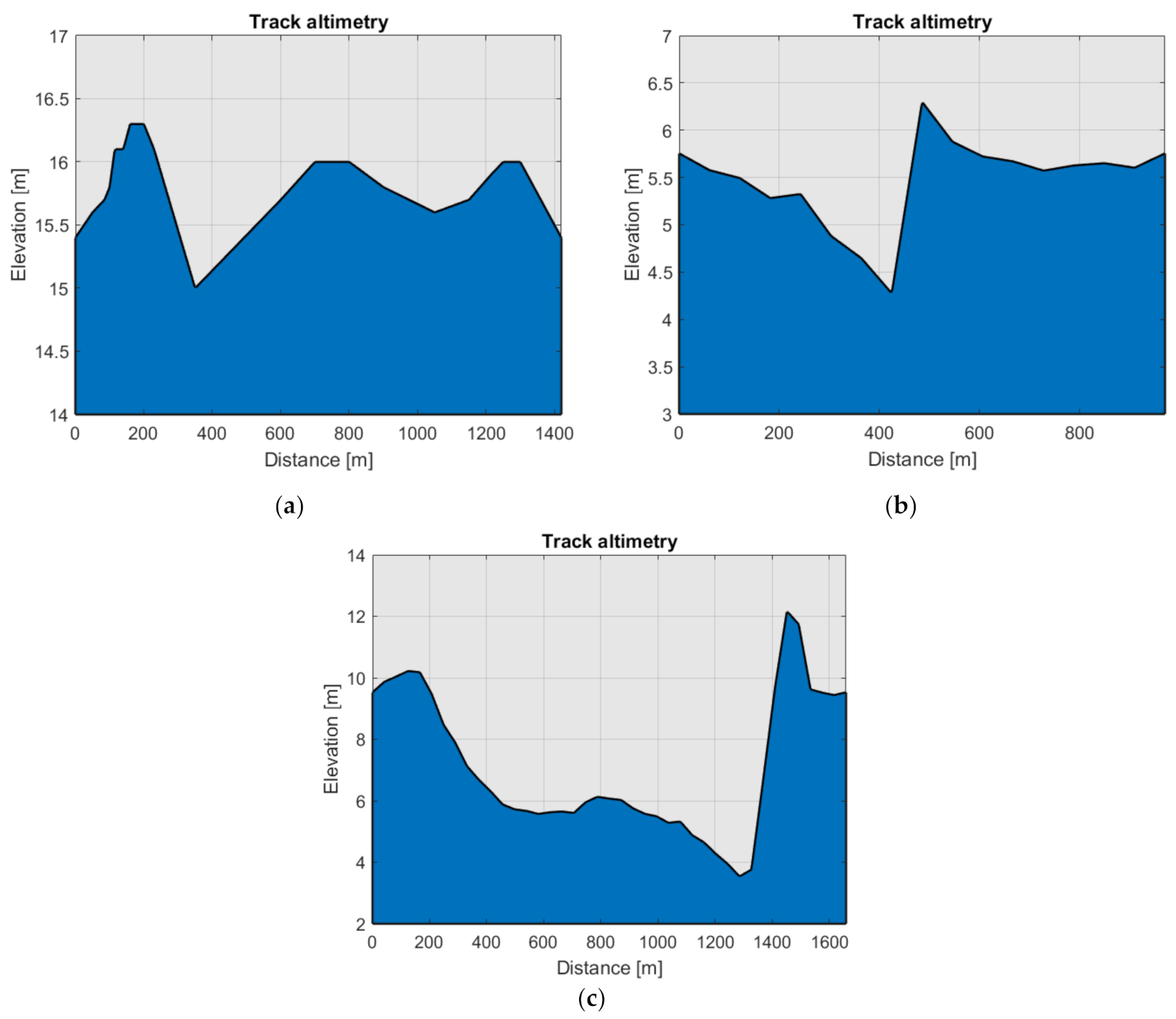
- Brooklands Circuit (UK)—Shell Eco-marathon Europe 2019 (Circuit 1);
- Queen Elizabeth Park, London (UK)—Shell Eco-marathon Europe 2018 (Circuit 2);
- Queen Elizabeth Park, London (UK)—Shell Eco-marathon Europe 2017 (Circuit 3).
5. Results and Discussion
6. Conclusions
- the rolling resistance, the aerodynamic drag and the inertial/grade effect have comparable roles in defining the overall energy consumption of the vehicle;
- unless the track has consistent uphill parts, rolling resistance and aerodynamic drag are the major contributors to the energy consumption. Together they give from 44% to 53% of the total energy consumption;
- the power losses due to vehicle inertia are related to the aggressiveness parameter of the track, ranging from 10% to 15%; additional resistances during the cornering phases show a non-negligible contribution, ranging from 5% to 12%, depending on the track.
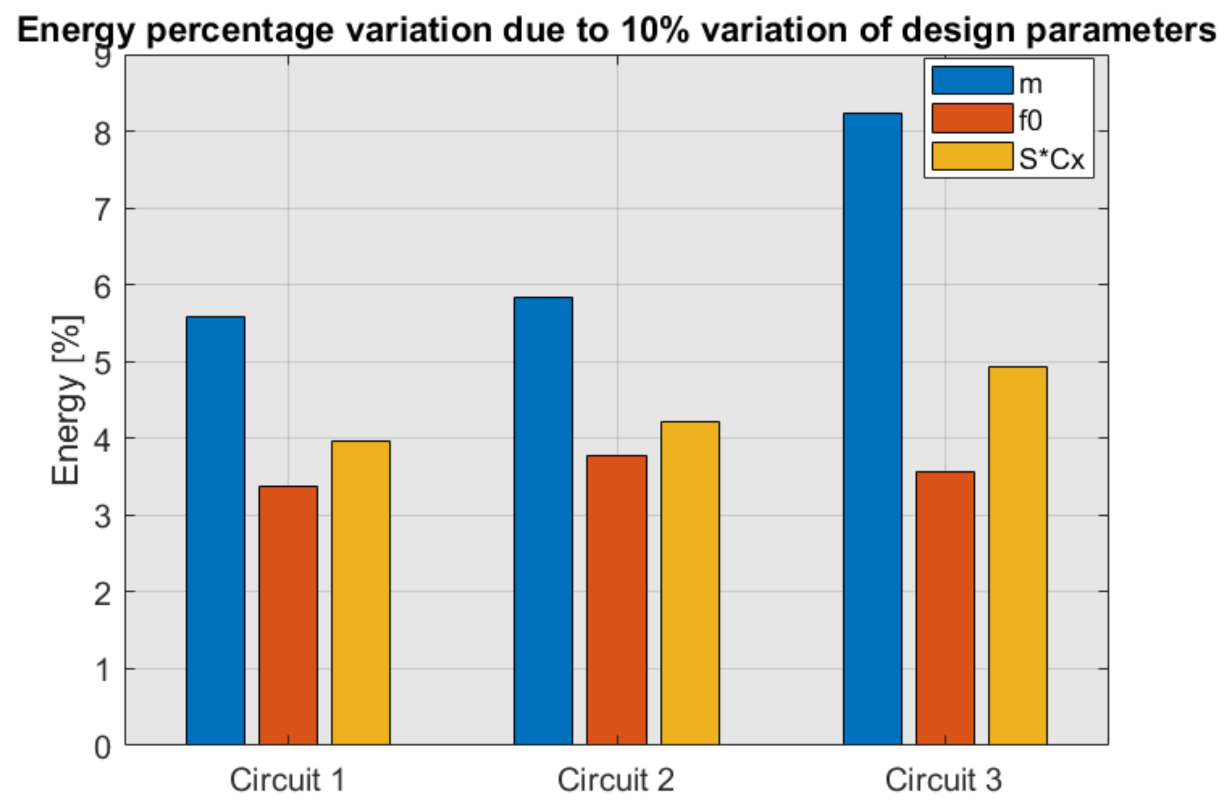
- the energy variation exhibits a linear trend for all the analyzed parameters;
- for all the three considered tracks, a reduction of the vehicle mass provides the highest benefits in terms of energy reduction. In particular, a 10% reduction of the vehicle mass leads to an energy consumption reduction ranging from 5.5% to 8%, depending on the track;
- tire rolling coefficient and aerodynamic drag coefficient provide comparable effects on the energy consumption, with contributions ranging from 3% to 5%.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- IEA. Global EV Outlook 2020; IEA: Paris, France, 2020; Available online: https://www.iea.org/reports/global-ev-outlook-2020 (accessed on 1 December 2020).
- Hawkins, T.R.; Gausen, O.M.; Strømman, A.H. Environmental impacts of hybrid and electric vehicles-a review. Int. J. Life Cycle Assess. 2012, 17, 997–1014. [Google Scholar] [CrossRef]
- Egede, P. Electric Vehicles, Lightweight Design and Environmental Impacts. In Environmental Assessment of Lightweight Electric Vehicles; Springer International Publishing: Berlin, Germany, 2017; ISBN 978-3-319-40277-2. [Google Scholar] [CrossRef]
- Ballo, F.M.; Gobbi, M.; Mastinu, G.; Previati, G. Optimal Lightweight Construction Principles; Springer International Publishing: Berlin, Germany, 2021. [Google Scholar]
- Mayyas, A.; Omar, M.; Hayajneh, M.; Mayyas, A.R. Vehicle’s lightweight design vs. electrification from life cycle assessment perspective. J. Clean. Prod. 2017, 167, 687–701. [Google Scholar] [CrossRef]
- European Commission: DG Mobility and Transport. Sustainable and Smart Mobility Strategy—Putting European Transport on Track for the Future. 2020. Available online: https://ec.europa.eu/transport/sites/transport/files/legislation/com20200789.pdf (accessed on 1 December 2020).
- Shell Eco-marathon. Shell Eco-Marathon 2021 Official Rules Chapter 1. 2020. Available online: https://www.makethefuture.shell/en-gb/shell-eco-marathon/global-rules (accessed on 1 December 2020).
- Carmeli, M.S.; Castelli-Dezza, F.; Galmarini, G.; Mauri, M.; Piegari, L. A vehicle with very low fuel consumption: Realization, analysis and optimization. In Proceedings of the The IX International Conference on Electrical Machines—ICEM 2010, Monte-Carlo, Monaco, 25–27 March 2014; IEEE: Rome, Italy, 2010. [Google Scholar]
- Galmarini, G.; Dell’Agostino, S.; Gobbi, M.; Mastinu, G. Solar prototype for shell-eco marathon race. SAE Technical Paper. 28 March 2017. Available online: https://www.sae.org/publications/technical-papers/content/2017-01-1260/?PC=DL2BUY (accessed on 1 December 2020). [CrossRef]
- Galmarini, G.; Gobbi, M.; Mastinu, G. Design, construction and employment of a sustainable “urban concept” race vehicle. Proc. ASME Des. Eng. Tech. Conf. 2012, 6, 459–468. [Google Scholar]
- Stabile, P.; Ballo, F.; Gobbi, M.; Mastinu, G. Innovative chassis made from EPP and CFRP of an urban-concept vehicle. In Proceedings of the ASME 2020 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, 17–19 August 2020. Virtual, Online. [Google Scholar]
- Carmeli, M.S.; Castelli-Dezza, F.; Galmarini, G.; Mastinu, G.; Mauri, M. A urban vehicle with very low fuel consumption: Realization, analysis and optimization. In Proceedings of the 2014 9th International Conference on Ecological Vehicles and Renewable Energies, EVER 2014, Monte-Carlo, Monaco, 25–27 March 2014; IEEE: Monte Carlo, Monaco, 2014; pp. 5–10. [Google Scholar]
- Targosz, M.; Skarka, W.; Przystałka, P. Model-based optimization of velocity strategy for lightweight electric racing cars. J. Adv. Transp. 2018, 2018, 1–20. [Google Scholar] [CrossRef]
- Carello, M.; Bertipaglia, A.; Messana, A.; Airale, A.G.; Sisca, L. Modeling and optimization of the consumption of a three-wheeled vehicle. SAE Technical Papers. 2 April 2019, pp. 1–9. Available online: https://www.sae.org/publications/technical-papers/content/2019-01-0164/ (accessed on 1 December 2020). [CrossRef]
- Sawulski, J.; Ławryńczuk, M. Optimization of control strategy for a low fuel consumption vehicle engine. Inf. Sci. 2019, 493, 192–216. [Google Scholar] [CrossRef]
- Olivier, J.C.; Wasselynck, G.; Chevalier, S.; Auvity, B.; Josset, C.; Trichet, D.; Squadrito, G.; Bernard, N. Multiphysics modeling and optimization of the driving strategy of a light duty fuel cell vehicle. Int. J. Hydrog. Energy 2017, 42, 26943–26955. [Google Scholar] [CrossRef]
- Yi, Z.; Bauer, P.H. Sensitivity analysis of environmental factors for electric vehicles energy consumption. In Proceedings of the 2015 IEEE Vehicle Power and Propulsion Conference (VPPC), Montreal, QC, Canada, 19–22 October 2015. [Google Scholar]
- Asamer, J.; Graser, A.; Heilmann, B.; Ruthmair, M. Sensitivity analysis for energy demand estimation of electric vehicles. Transp. Res. Part D Transp. Environ. 2016, 46, 182–199. [Google Scholar] [CrossRef]
- Mastinu, G. Road and Off-Road Vehicle System Dynamic Handbook; Mastinu, G., Plöchl, M., Eds.; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Holjevac, N.; Cheli, F.; Gobbi, M. A simulation-based concept design approach for combustion engine and battery electric vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 1950–1967. [Google Scholar] [CrossRef]
- Mahmoudzadeh Andwari, A.; Pesiridis, A.; Rajoo, S.; Martinez-Botas, R.; Esfahanian, V. A review of battery electric vehicle technology and readiness levels. Renew. Sustain. Energy Rev. 2017, 78, 414–430. [Google Scholar] [CrossRef]
- Gechev, T.; Punov, P. Driving strategy for minimal energy consumption of an ultra-energy-efficient vehicle in Shell Eco-marathon competition. IOP Conf. Ser. Mater. Sci. Eng. 2020, 1002, 012018. [Google Scholar] [CrossRef]
- Datasheet Battery. Available online: https://it.mathworks.com/help/autoblks/ref/datasheetbattery.html (accessed on 1 December 2020).
- Huria, T.; Ceraolo, M.; Gazzarri, J.; Jackey, R. High fidelity electrical model with thermal dependence for characterization and simulation of high power lithium battery cells. In Proceedings of the 2012 IEEE International Electric Vehicle Conference, IEVC, Greenville, SC, USA, 4–8 March 2012; IEEE: Greenville, SC, USA, 2012. [Google Scholar]
- Wei, Z.; Dong, G.; Zhang, X.; Pou, J.; Quan, Z.; He, H. Noise-immune model identification and state-of-charge estimation for lithium-ion battery using bilinear parameterization. IEEE Trans. Ind. Electron. 2021, 68, 312–323. [Google Scholar] [CrossRef]
- Samsung INR18650-35E Datasheet. Available online: https://lygte-info.dk/review/batteries2012/SamsungINR18650-35E 3500mAh (Pink) UK.html (accessed on 1 December 2020).
- Wu, J.; Wei, Z.; Li, W.; Wang, Y.; Li, Y.; Sauer, D. Battery thermal- and health-constrained energy management for hybrid electric bus based on soft actor-critic drl algorithm. IEEE Trans. Ind. Inform. 2020, 3203, 1. [Google Scholar] [CrossRef]
- Olivier, J.C.; Wasselynck, G.; Ireena, D.T.; Auvity, B.; Josset, C.; Le-Bozec, C.; Maindru, P. Power source to wheel model of a high efficiency fuel cell based vehicle. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; IEEE: Lille, France, 2010; pp. 1–6. [Google Scholar]
- Average-Value Chopper. Available online: https://it.mathworks.com/help/physmod/sps/ref/averagevaluechopper.html (accessed on 1 December 2020).
- Olivier, J.C.; Wasselynck, G.; Trichet, D.; Auvity, B.; Josset, C.; Maindru, P.; Machmoum, M. Light-duty fuel-cell vehicle designed for energetic races. Eur. J. Electr. Eng. 2011, 14, 215–236. [Google Scholar]
- DC Motor. Available online: https://it.mathworks.com/help/physmod/sps/ref/dcmotor.html (accessed on 1 December 2020).
- Simple Gear. Available online: https://it.mathworks.com/help/physmod/sdl/ref/simplegear.html (accessed on 1 December 2020).
- Unidirectional Clutch. Available online: https://it.mathworks.com/help/physmod/sdl/ref/unidirectionalclutch.html (accessed on 1 December 2020).
- Galmarini, G. Costruzione ed Impiego di un Veicolo per la Competizione Shell Eco-Marathon; Politecnico di Milano: Milan, Italy, 2010. [Google Scholar]
- Kivekäs, K.; Lajunen, A.; Vepsäläinen, J.; Tammi, K. City bus powertrain comparison: Driving cycle variation and passenger load sensitivity analysis. Energies 2018, 11, 1755. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Vehicle mass (without driver) | mv | 92 kg |
| Front section area | S | 0.95 m2 |
| Aerodynamic drag coefficient | Cx | 0.102 |
| Rolling resistance coefficient | f0 | 0.0026 |
| Transmission ratio | τ | 192/13 |
| Transmission efficiency | ηtr | 0.96 |
| Parameter | Cityjoule [16] | PAKS [15] | TUS Team Vehicle [22] |
|---|---|---|---|
| mv | 150 kg | 121 kg | 170 kg |
| S | 0.88 m2 | 1.008 m2 | 0.795 m2 |
| Cx | 0.1 | 0.302 | 0.136 |
| f0 | 0.0021 | 0.00133 | 0.004 |
| Parameter | Value |
|---|---|
| Number of modules in parallel | 4 |
| Number of cells in series per module | 13 |
| Cell nominal capacity | 3500 mAh |
| Cell nominal voltage | 3.6–3.7 V |
| Cell maximum discharge current | 13 A |
| Cell discharge voltage | 2.65 V |
| Cell weight | 48 g |
| Parameter | Value |
|---|---|
| Nominal voltage | 48 V |
| No load speed | 4900 rpm |
| No load current | 88.4 mA |
| Stall torque | 7370 mNm |
| Stall current | 78.9 A |
| Maximum efficiency | 0.94 |
| Terminal resistance | 0.698 Ω |
| Terminal inductance | 0.423 mH |
| Torque constant | 93.4 mNm/A |
| Speed constant | 102 rpm/V |
| Rotor inertia | 542 gcm2 |
| Weight | 1100 g |
| Parameter | Circuit 1 | Circuit 2 | Circuit 3 |
|---|---|---|---|
| Distance [m] | 1420 | 970 | 1659 |
| Target time [s] | 215 | 141 | 235 |
| Average speed [km/h] | 23.8 | 24.8 | 25.4 |
| Difference in altitude [m] | 2.3 | 2.1 | 10.4 |
| Aggressiveness [m/s2] | 0.0275 | 0.0842 | 0.0339 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stabile, P.; Ballo, F.; Mastinu, G.; Gobbi, M. An Ultra-Efficient Lightweight Electric Vehicle—Power Demand Analysis to Enable Lightweight Construction. Energies 2021, 14, 766. https://doi.org/10.3390/en14030766
Stabile P, Ballo F, Mastinu G, Gobbi M. An Ultra-Efficient Lightweight Electric Vehicle—Power Demand Analysis to Enable Lightweight Construction. Energies. 2021; 14(3):766. https://doi.org/10.3390/en14030766
Chicago/Turabian StyleStabile, Pietro, Federico Ballo, Gianpiero Mastinu, and Massimiliano Gobbi. 2021. "An Ultra-Efficient Lightweight Electric Vehicle—Power Demand Analysis to Enable Lightweight Construction" Energies 14, no. 3: 766. https://doi.org/10.3390/en14030766
APA StyleStabile, P., Ballo, F., Mastinu, G., & Gobbi, M. (2021). An Ultra-Efficient Lightweight Electric Vehicle—Power Demand Analysis to Enable Lightweight Construction. Energies, 14(3), 766. https://doi.org/10.3390/en14030766