
Intelligent Multi-Vehicle DC/DC Charging Station Powered by a Trolley Bus Catenary Grid

 , , ,
, , ,
Abstract
:
1. Introduction
1.1. General Introduction
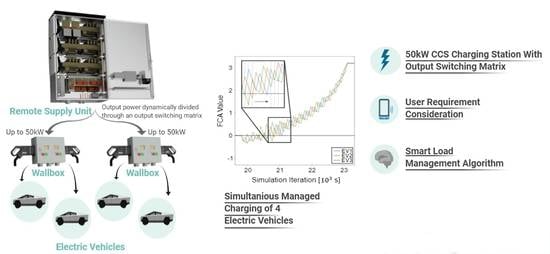
1.2. The Potential of Multi-Vehicle Charging
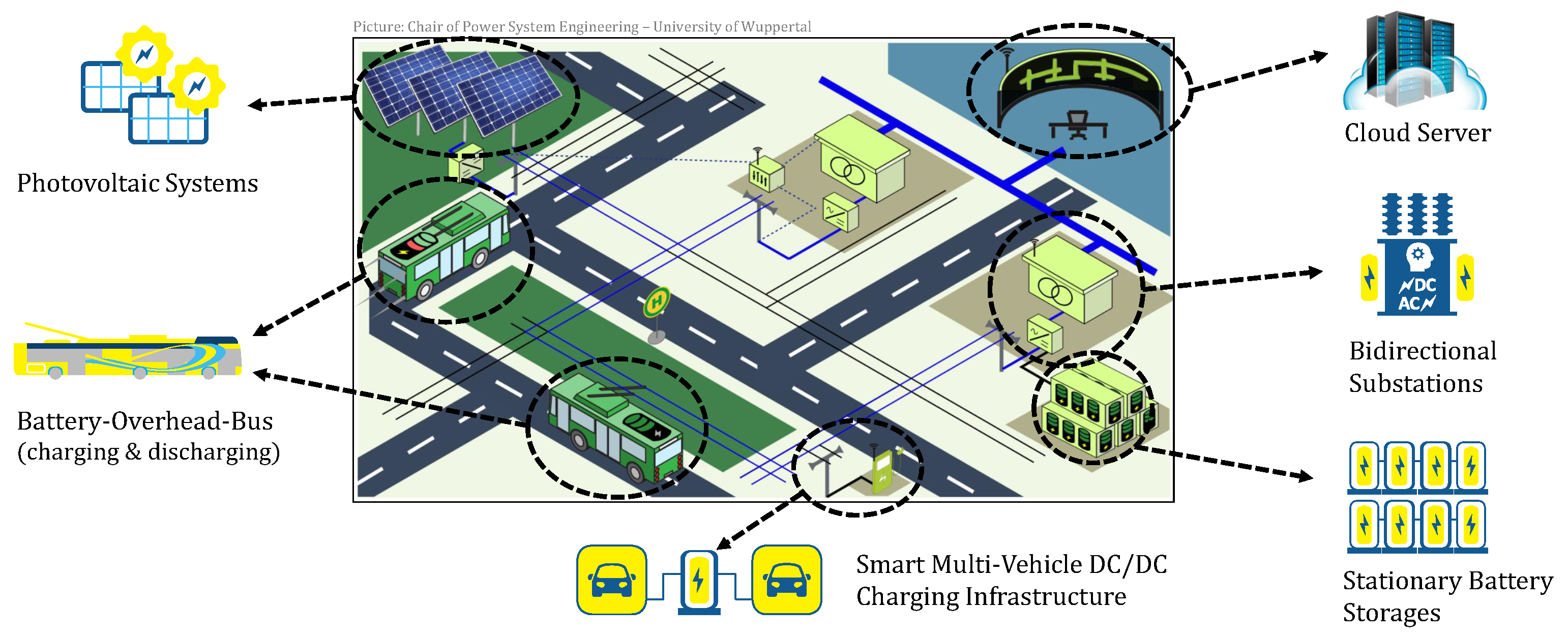
1.3. Research Environment—The Catenary Grid of Solingen
2. State of the Art
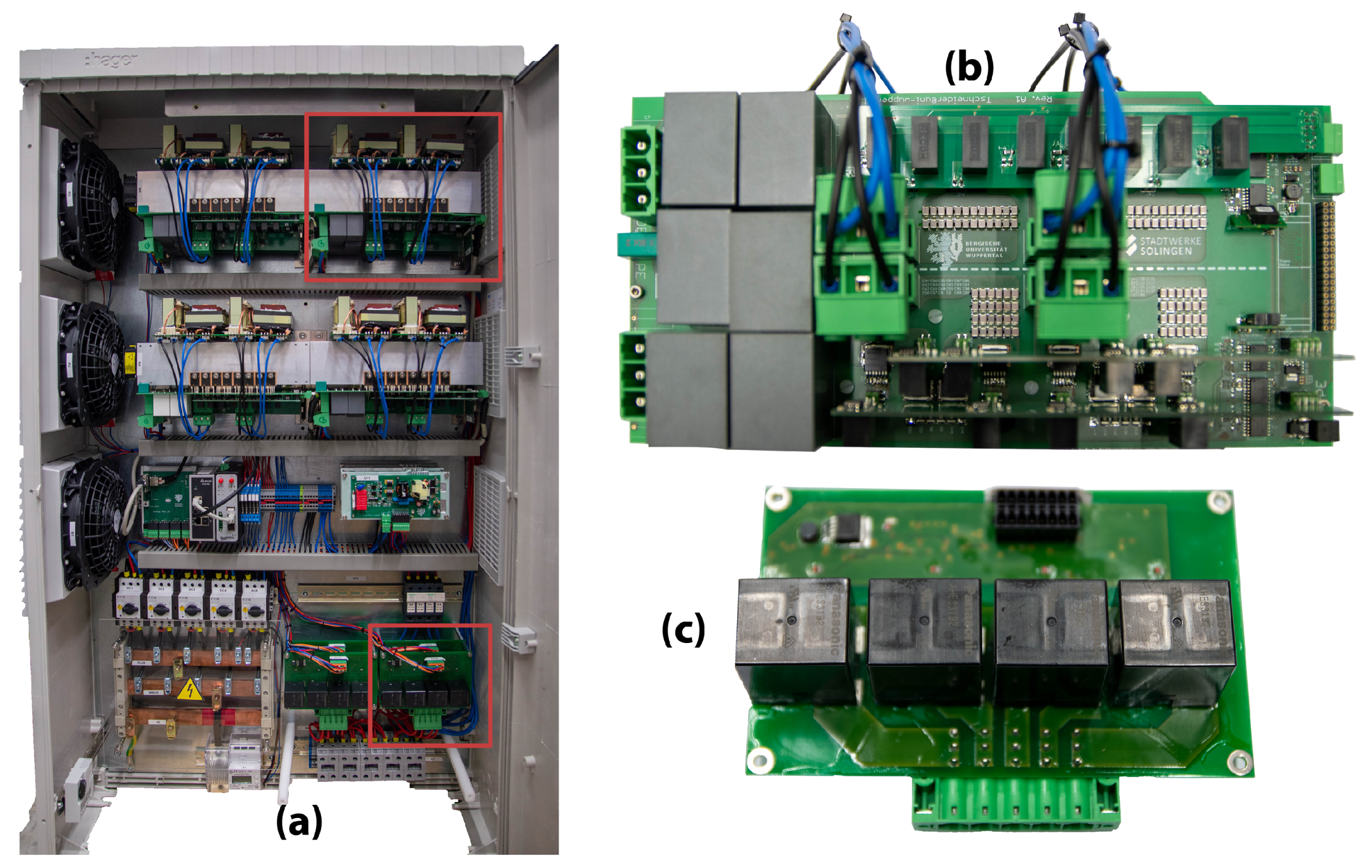
2.1. Hardware Fundamentals
2.2. Communication Standards
2.3. Smart Charging Algorithms
3. Object of Investigation and Methodology
3.1. The DC/DC Multi-Vehicle-Charging Concept
3.2. Scenario Description
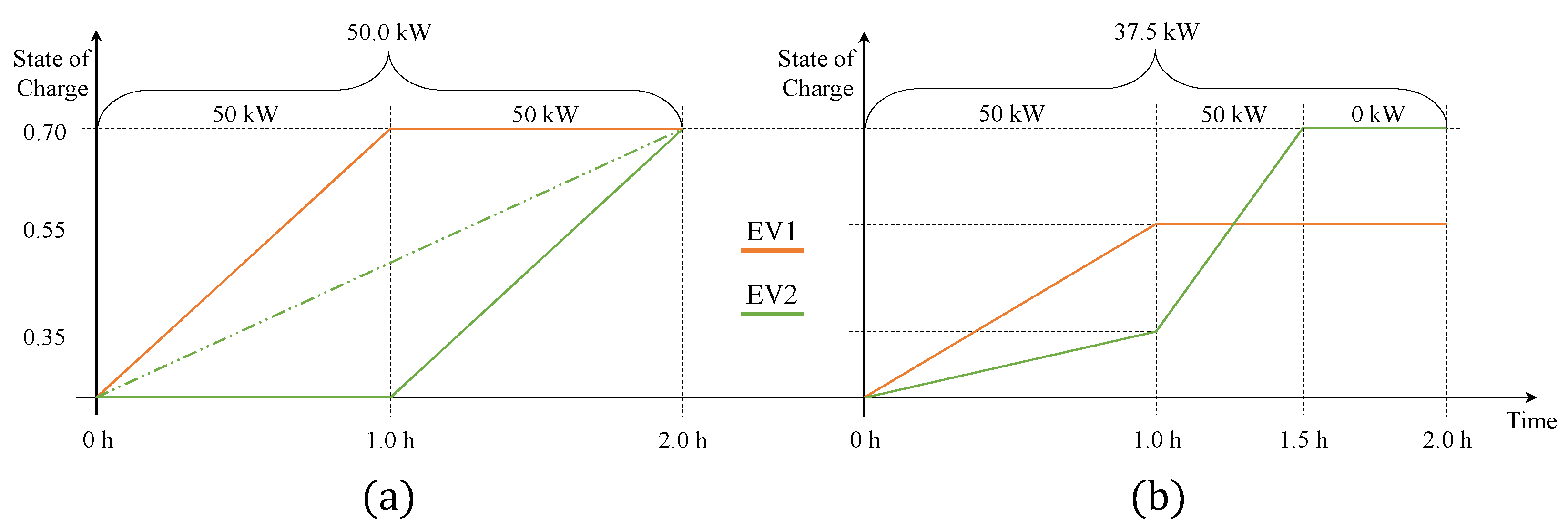
3.2.1. Classic Use Case—Simulation and Measurement
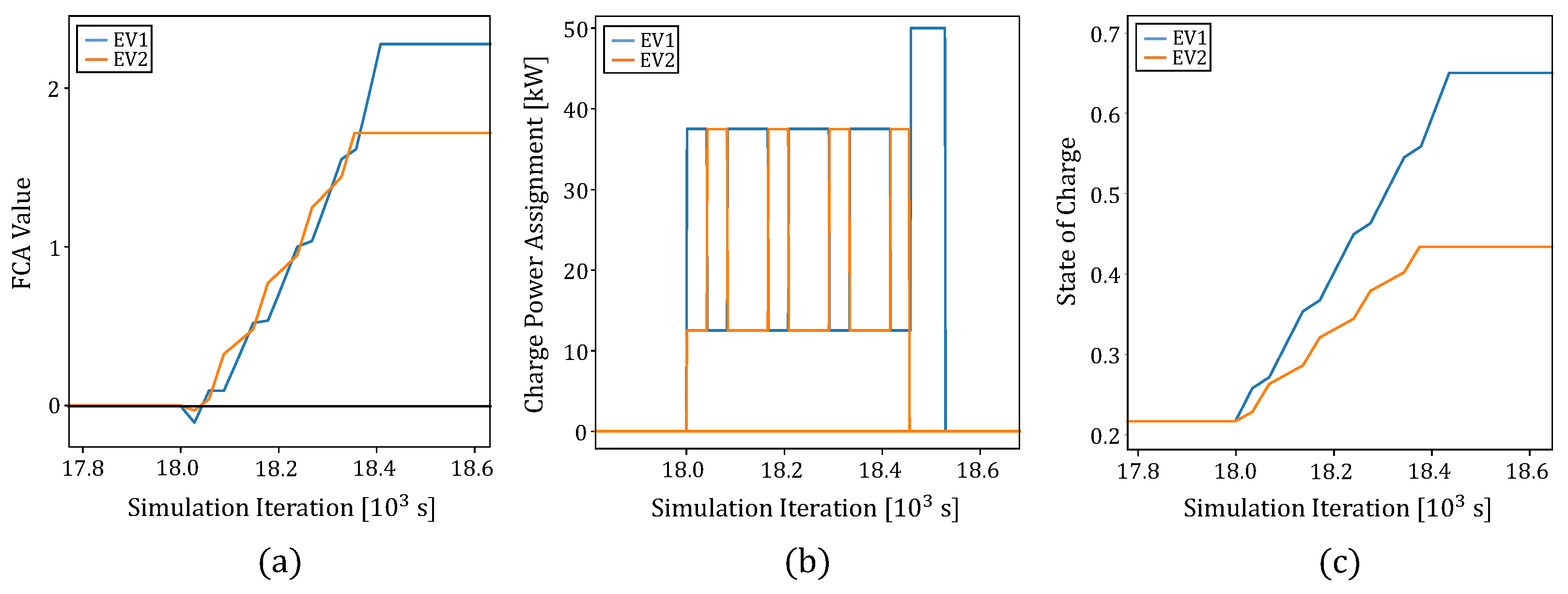
3.2.2. Double Split by Preferences—Simulation
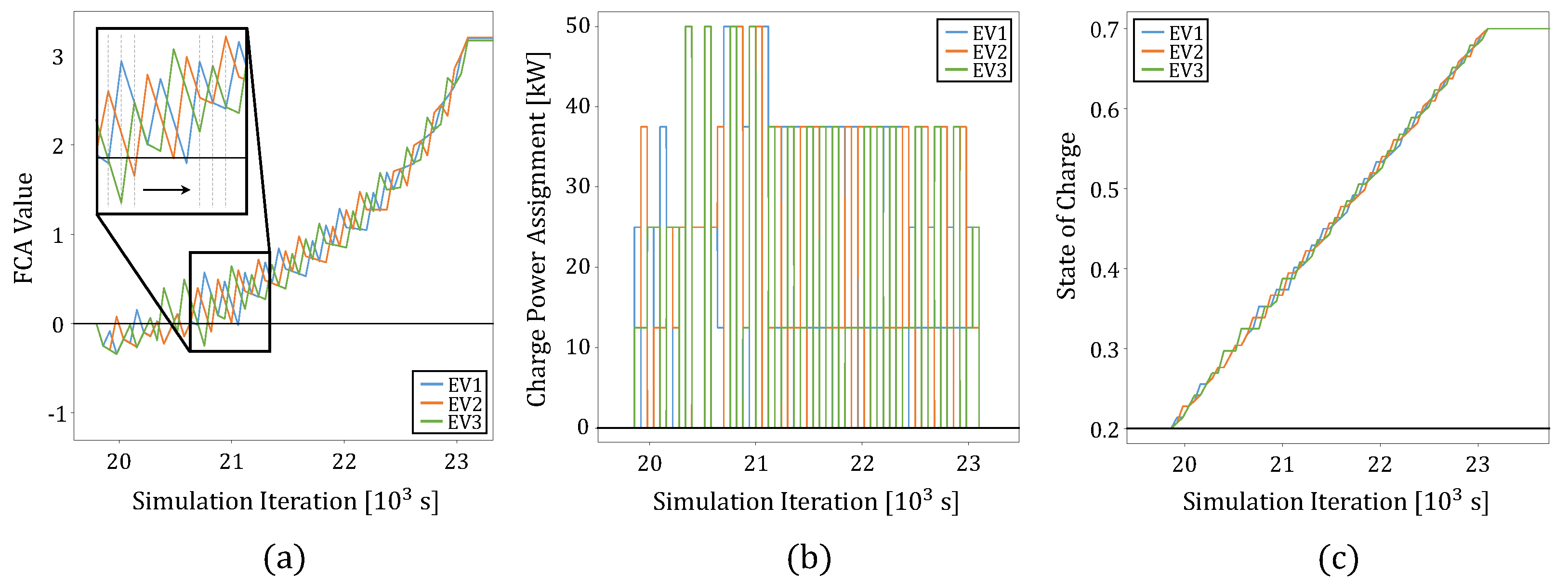
3.2.3. Trio Simultaneously—Simulation
3.2.4. One against Three—Simulation
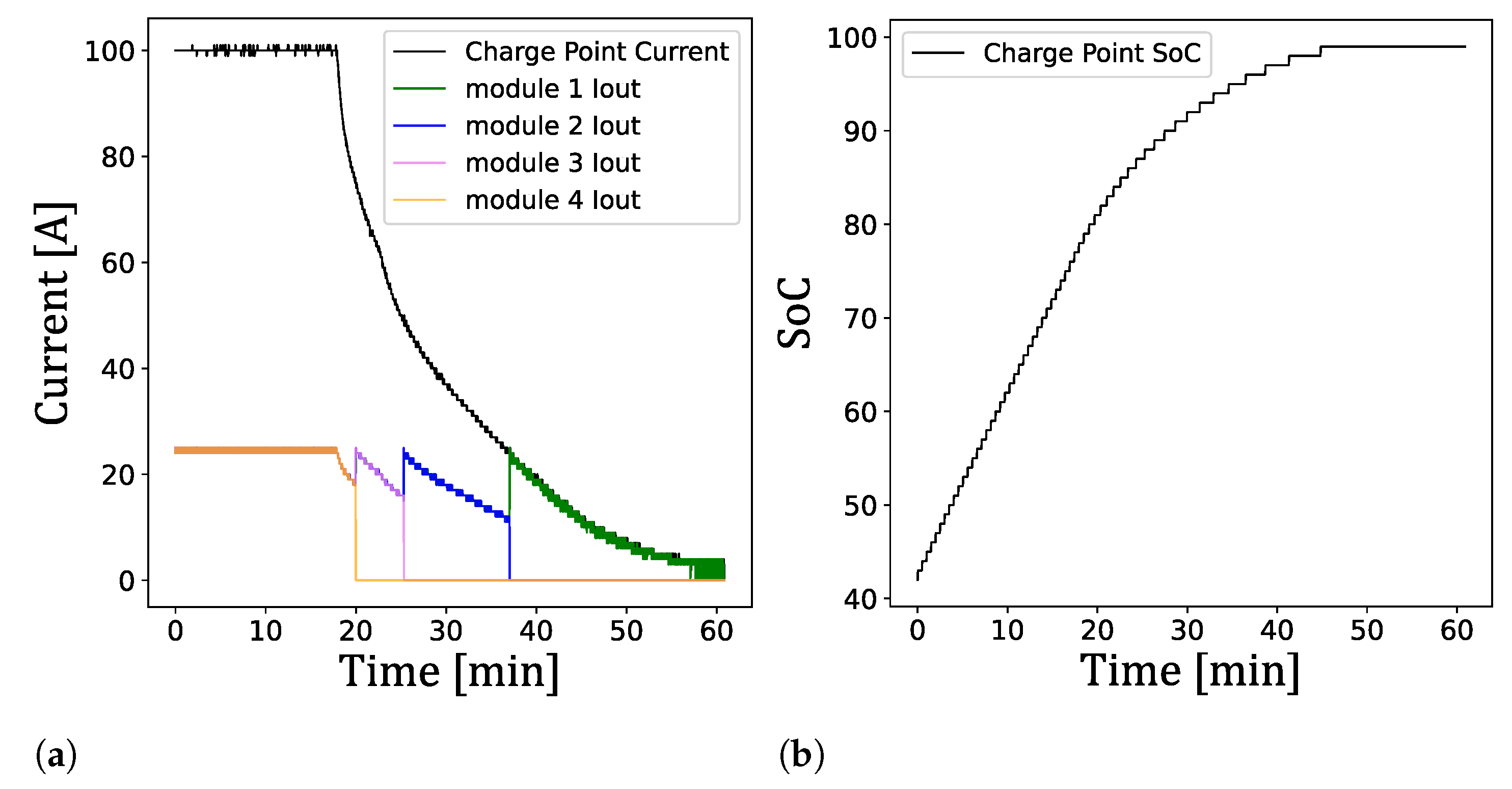
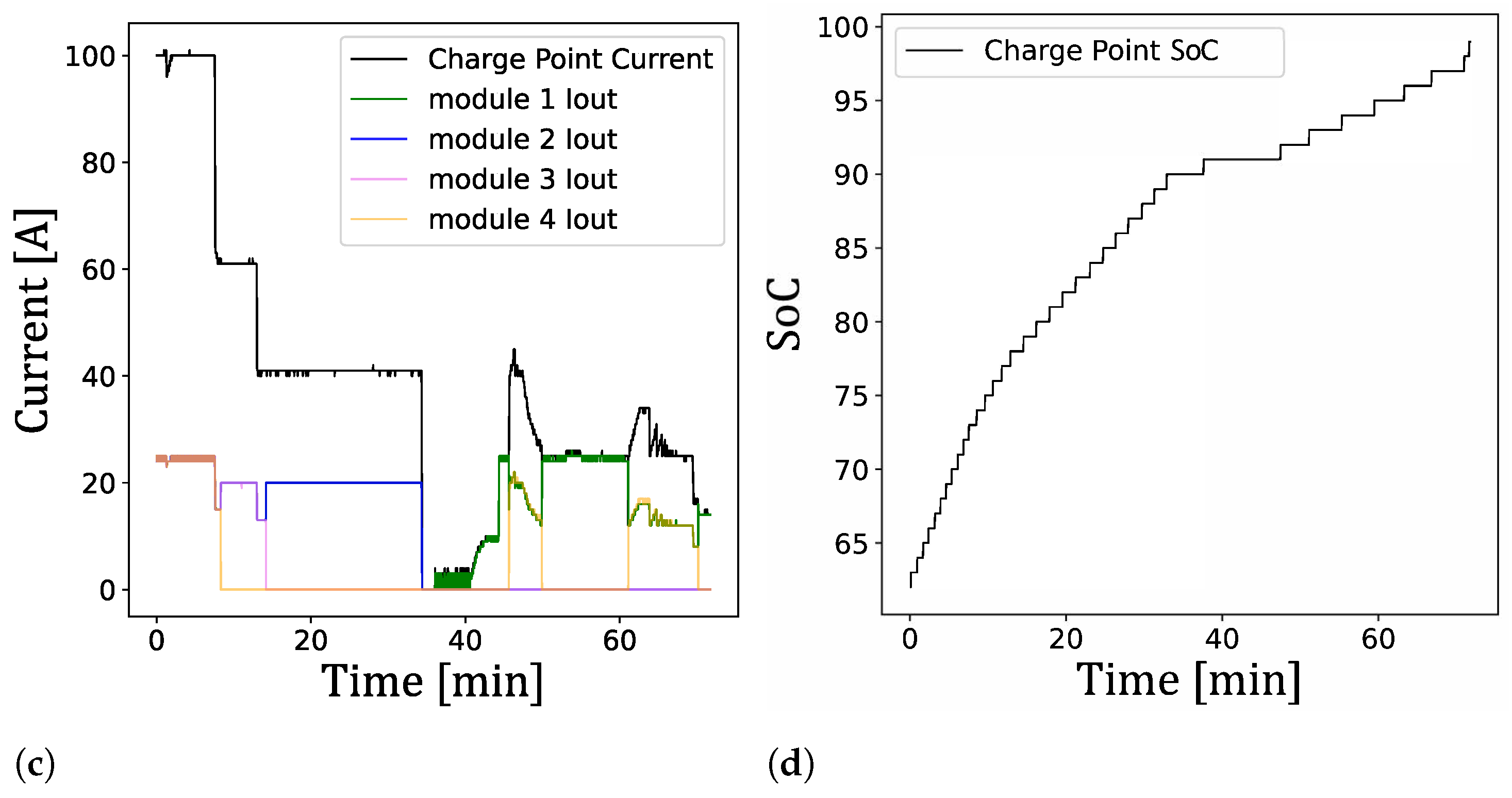
3.2.5. Full Charging with Module Shedding—Measurement
3.2.6. Overall Daily Performance Potential—Simulation
4. Results and Discussion
4.1. Classic Use Case—Simulation and Measurement
4.2. Double Split by Preferences—Simulation
4.3. Simultaneous Trio—Simulation
4.4. One against Three—Simulation
4.5. Full Charging with Module Shedding—Measurement
4.6. Overall Daily Performance Potential—Simulation
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- International Energy Agency. Global EV Outlook 2021—Accelerating Ambitions Despite the Pandemic; International Energy Agency: Paris, France, 2021. [Google Scholar]
- International Energy Agency. Global EV Outlook 2020—Entering the Decade of Electric Drive; International Energy Agency: Paris, France, 2020. [Google Scholar]
- United Nations. Paris Agreement; COP 21; The United Nations: Paris, France, 2015. [Google Scholar]
- Enzmann, J.; Ringel, M. Reducing Road Transport Emissions in Europe: Investigating A Demand Side Driven Approach. Sustainability 2020, 12, 7594. [Google Scholar] [CrossRef]
- Euopean Commission. Fit for 55 Package; Euopean Commission: Brussels, Belgium, 2021. [Google Scholar]
- European Environment Agency. Monitoring CO2 Emissions from Passenger Cars and Vans in 2018; European Environment Agency: Copenhagen, Denmark, 2020.
- International Energy Agency. World Energy Outlook 2021; International Energy Agency: Paris, France, 2021. [Google Scholar]
- European Court of Auditors. Infrastructure for Charging Electric Infrastructure for Charging Electric Vehicles: More Charging Stations But Uneven Deployment More Charging Stations but Uneven Deployment; European Union: Luxembourg, 2021. [Google Scholar]
- Brown, A.; Lommele, S.; Schayowitz, A.; Klotz, E. Electric Vehicle Charging Infrastructure Trends from the Alternative Fueling Station Locator: Third Quarter 2020; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2021.
- Euopean Commission. The European Green Deal; Euopean Commission: Brussels, Belgium, 2019. [Google Scholar]
- Wolbertus, R.; van den Hoed, R.; Kroesen, M.; Chorus, C. Charging infrastructure roll-out strategies for large scale introduction of electric vehicles in urban areas: An agent-based simulation study. Transp. Res. Part A Policy Pract. 2021, 148, 262–285. [Google Scholar] [CrossRef]
- Nicholas, M.; Lutsey, N. Quantifying the Electric Vehicle Charging Infrastructure Gap in the United Kingdom; International Coucil on Clean Transportation: London, UK, 2020. [Google Scholar]
- Brenna, M.; Foiadelli, F.; Leone, C.; Longo, M. Electric Vehicles Charging Technology Review and Optimal Size Estimation. J. Electr. Eng. Technol. 2020, 15, 2539–2552. [Google Scholar] [CrossRef]
- Tu, H. Extreme Fast Charging of Electric Vehicles: A Technology Overview. IEEE Trans. Transp. Electrific. 2019, 5, 861–878. [Google Scholar] [CrossRef]
- Rare Look Inside Tesla Supercharger. Available online: https://insideevs.com/news/322486/rare-look-inside-tesla-supercharger/ (accessed on 19 October 2021).
- INFOGRAPHIC|Terra 184 Charger. Available online: https://search.abb.com/library/Download.aspx?DocumentID=9AKK107680A8808&LanguageCode=en&DocumentPartId=&Action=Launch (accessed on 19 October 2021).
- Product Leaflet Electric Vehicle Infrastructure Terra High Power—GEN III. Available online: https://search.abb.com/library/Download.aspx?DocumentID=9AKK107991A9632&LanguageCode=en&DocumentPartId=&Action=Launch (accessed on 19 October 2021).
- Jiang, T.; Chen, X.; Zhang, J.; Wang, Y. Bidirectional llc resonantconverter for energy storage applications. In Proceedings of the Twenty-EighthAnnual IEEE Applied Power Electronics Conference and Exposition(APEC), Long Beach, CA, USA, 17–21 March 2013; pp. 1145–1151. [Google Scholar]
- Zhao, B.; Song, Q.; Liu, W.; Sun, Y. Overview of dual-active-bridge isolated bidirectional dcdc converter for high-frequency-linkpower-conversion system. IEEE Trans. Power Electron. 2014, 29, 4091–4106. [Google Scholar] [CrossRef]
- Zahid, Z.U.; Dalala, Z.M.; Chen, R.; Chen, B.; Lai, J. Design of Bidirectional DC–DC Resonant Converter for Vehicle-to-Grid (V2G) Applications. IEEE Trans. Transp. Electrific. 2015, 1, 232–244. [Google Scholar] [CrossRef]
- Jung, J.; Kim, H.; Kim, J.; Ryu, M.; Baek, J. High efficiency bidirectional llc resonant converter for 380V dc power distribution system using digital control scheme. In Proceedings of the Twenty-Seventh Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 5–9 February 2012; pp. 532–538. [Google Scholar]
- Schneider, T.; Kratz, S.; Wegener, R.; Soter, S. Symmetrical Bidirectional CLLC-Converter with Simplified Synchronous Rectification for EV-Charging in Isolated DC Power Grids. In Proceedings of the IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019. [Google Scholar]
- Kong, P.; Karagiannidis, G.K. Charging Schemes for Plug-In Hybrid Electric Vehicles in Smart Grid: A Survey. IEEE Access 2016, 4, 6846–6875. [Google Scholar] [CrossRef]
- Li, Y.; Ni, Z.; Zhao, T.; Zhong, T.; Liu, Y.; Wu, L.; Zhao, Y. Supply Function Game Based Energy Management Between Electric Vehicle Charging Stations and Electricity Distribution System Considering Quality of Service. IEEE Trans. Ind. Appl. 2020, 56, 5932–5943. [Google Scholar] [CrossRef]
- Clement-Nyns, K. The Impact of Charging Plug-In Hybrid Electric Vehicles on a Residential Distribution Grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Shao, S. Demand Response as a Load Shaping Tool in an Intelligent Grid With Electric Vehicles. IEEE Trans. Smart Grid 2011, 2, 624–631. [Google Scholar] [CrossRef]
- Deshmukh, R.R.; Ballal, M.S. An energy management scheme for grid connected EVs charging stations. In Proceedings of the 2018 International Conference on Power, Instrumentation, Control and Computing (PICC), Thrissur, India, 18–20 January 2018; pp. 1–6. [Google Scholar]
- Zhang, J.; Yuan, R.; Yan, D.; Li, T.; Jiang, Z.; Ma, C.; Chen, T.; Luo, G. A Non-Cooperative Game Based Charging Power Dispatch in Electric Vehicle Charging Station and Charging Effect Analysis. In Proceedings of the 2018 2nd IEEE Conference on Energy Internet and Energy System Integration (EI2), Beijing, China, 20–22 October 2018. [Google Scholar]
- Yao, L.; Damiran, Z.; Lim, W.H. A fuzzy logic based charging scheme for electric vechicle parking station. In Proceedings of the 2016 IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016; pp. 1–6. [Google Scholar]
- Motoaki, Y.; Yi, W.; Salisbury, S. Empirical analysis of electric vehicle fast charging under cold temperatures. Energy Policy 2018, 122, 162–168. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| EV power supply | AC | AC | AC | DC |
| communication | none | PWM | PWM | PWM and digital |
| charging current controllability | EV only | EV only | station and EV | station and EV |
| max. current | A | A | A | up to A |
| max. power | kW (1p) kW (3p) | kW (1p) kW (3p) | kW (1p) kW (3p) | up to kW |
| Protocol | DIN SPEC 70121 | ISO 15118 ver.1 | ISO 15118 ver.2 |
|---|---|---|---|
| DC-Charging | √ | √ | √ |
| AC-Charging | ✗ | √ | √ |
| Load Management | ✗ | √ | √ |
| Plug & Charge | ✗ | √ | √ |
| Secured Communication | ✗ | √ | √ |
| Bidirectional Charging | ✗ | ✗ | √ |
| Inductive Charging | ✗ | ✗ | √ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Weisbach, M.; Schneider, T.; Maune, D.; Fechtner, H.; Spaeth, U.; Wegener, R.; Soter, S.; Schmuelling, B. Intelligent Multi-Vehicle DC/DC Charging Station Powered by a Trolley Bus Catenary Grid. Energies 2021, 14, 8399. https://doi.org/10.3390/en14248399
Weisbach M, Schneider T, Maune D, Fechtner H, Spaeth U, Wegener R, Soter S, Schmuelling B. Intelligent Multi-Vehicle DC/DC Charging Station Powered by a Trolley Bus Catenary Grid. Energies. 2021; 14(24):8399. https://doi.org/10.3390/en14248399
Chicago/Turabian StyleWeisbach, Michéle, Tobias Schneider, Dominik Maune, Heiko Fechtner, Utz Spaeth, Ralf Wegener, Stefan Soter, and Benedikt Schmuelling. 2021. "Intelligent Multi-Vehicle DC/DC Charging Station Powered by a Trolley Bus Catenary Grid" Energies 14, no. 24: 8399. https://doi.org/10.3390/en14248399
APA StyleWeisbach, M., Schneider, T., Maune, D., Fechtner, H., Spaeth, U., Wegener, R., Soter, S., & Schmuelling, B. (2021). Intelligent Multi-Vehicle DC/DC Charging Station Powered by a Trolley Bus Catenary Grid. Energies, 14(24), 8399. https://doi.org/10.3390/en14248399