
Energy Efficiency and Limitations of the Methods of Controlling the Hydraulic Cylinder Piston Rod under Various Load Conditions




Abstract
:1. Introduction
2. Methods of Cushioning the Piston Overrun
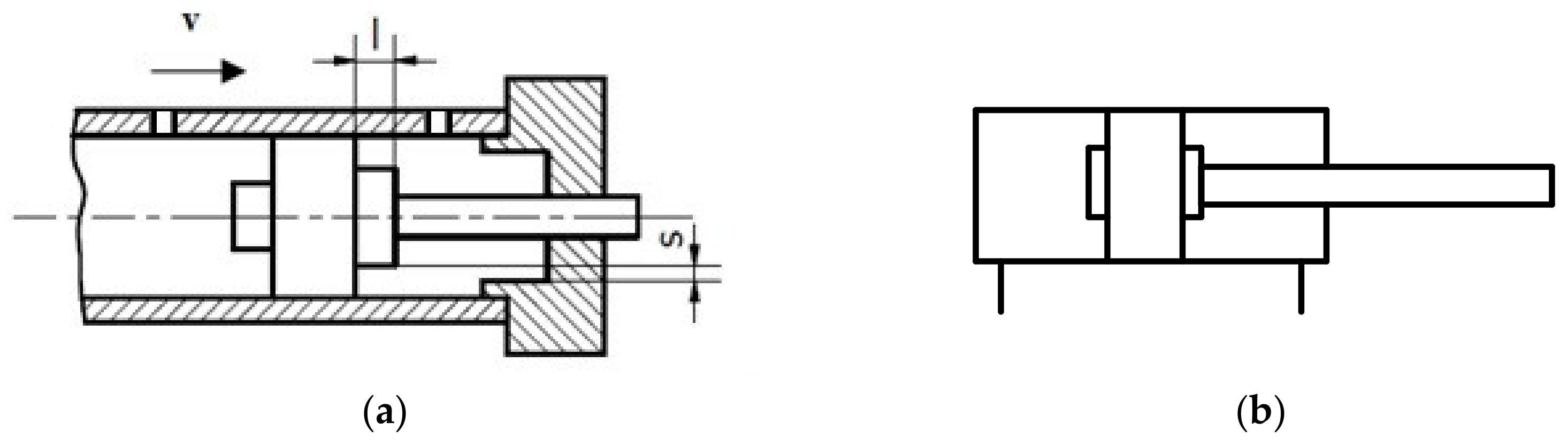
2.1. Cushioning with Annular Clearance Method (Braking Gap)
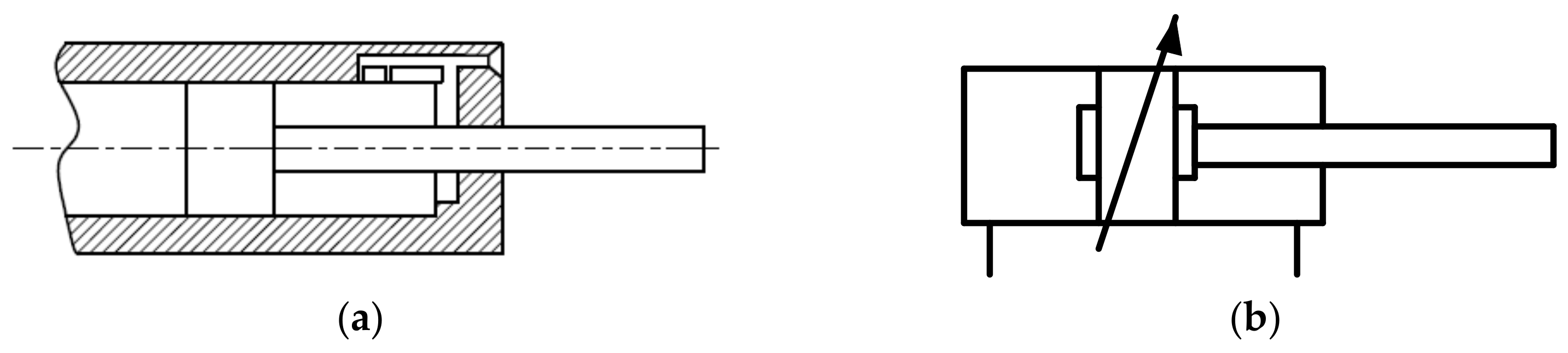
2.2. Cushioning with the Orifice Method
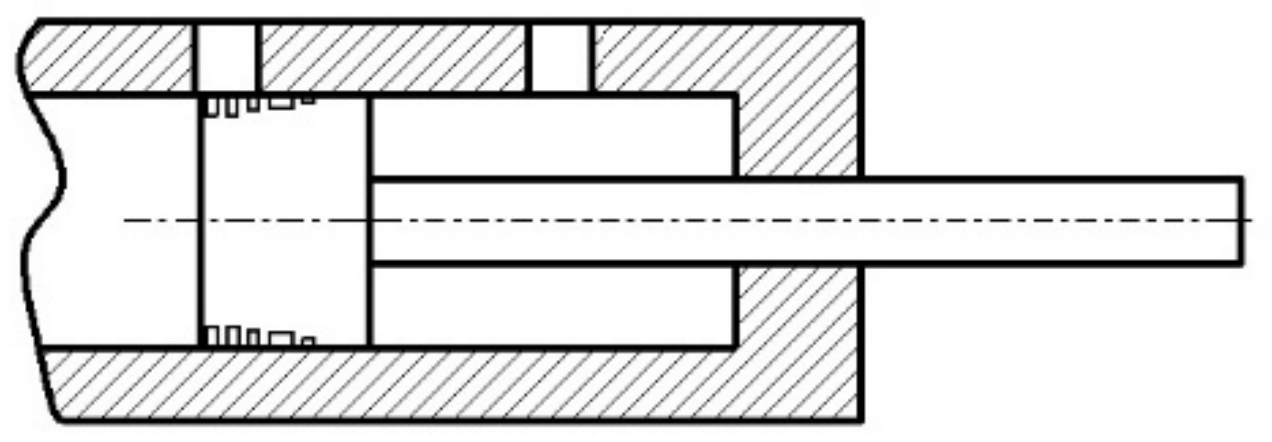
2.3. Cushioning Using the Piston Groove Method
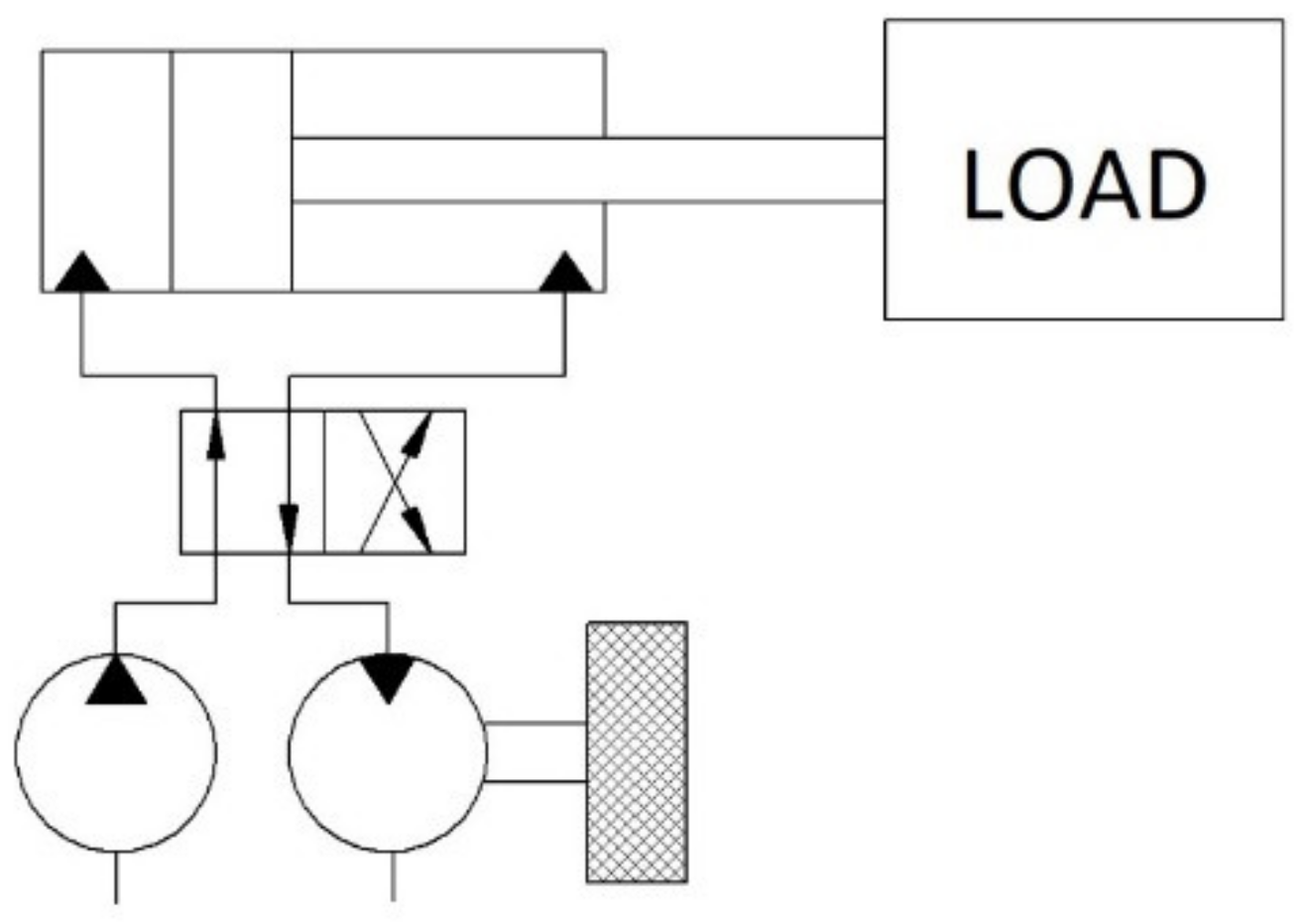
2.4. Braking with a Flywheel
3. Valve Methods for Controlling the Movement of the Actuator Piston Rod
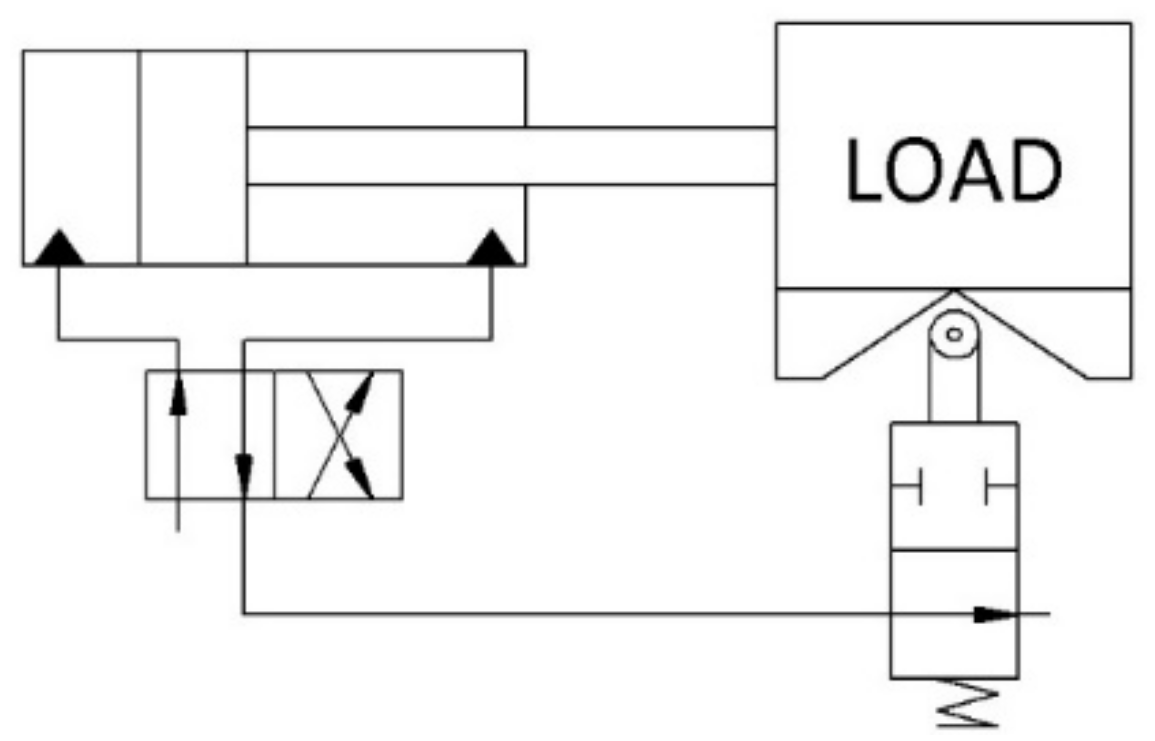
3.1. Braking with the Deceleration Valve Method
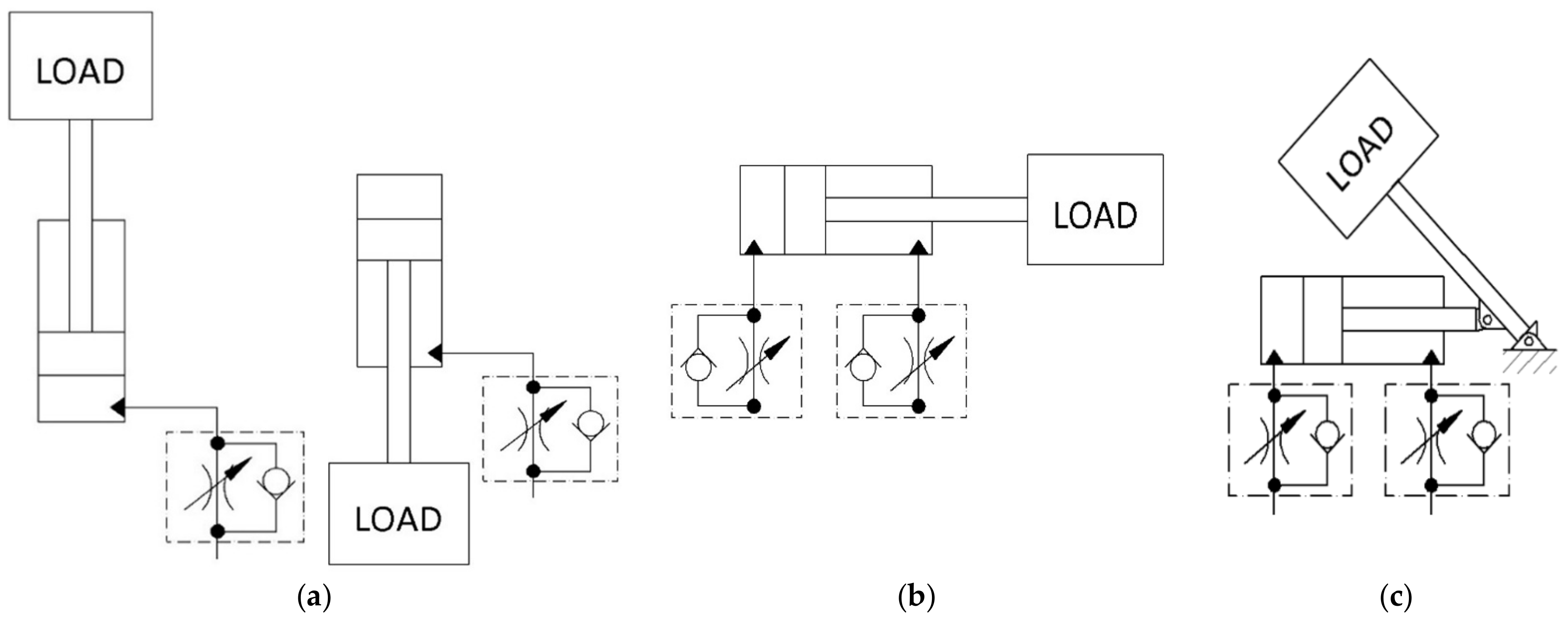
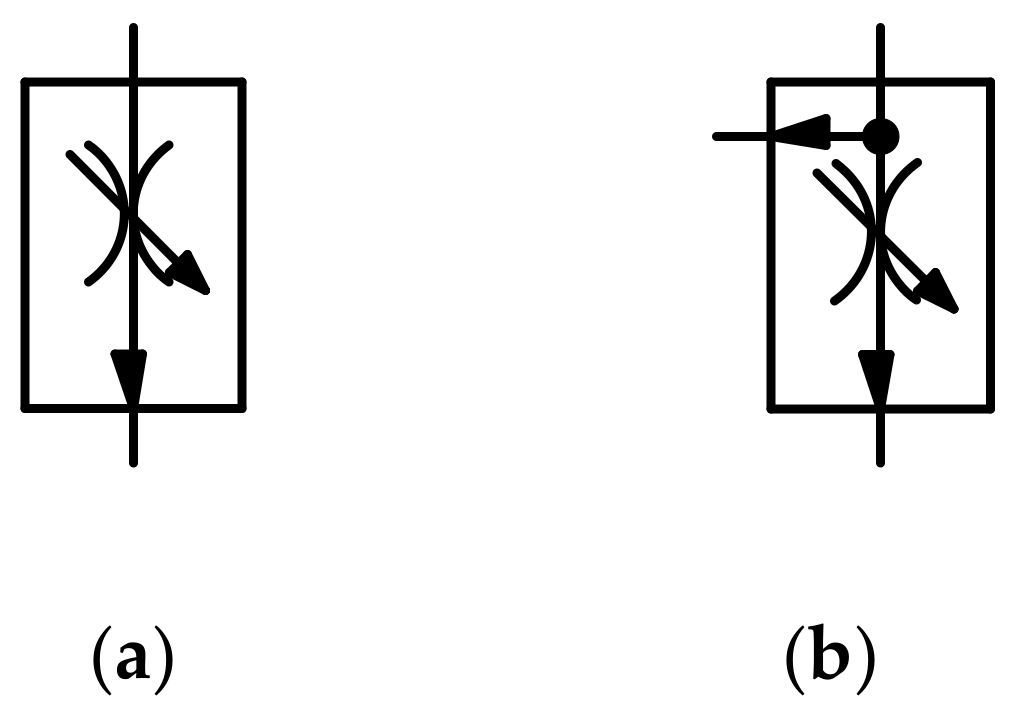
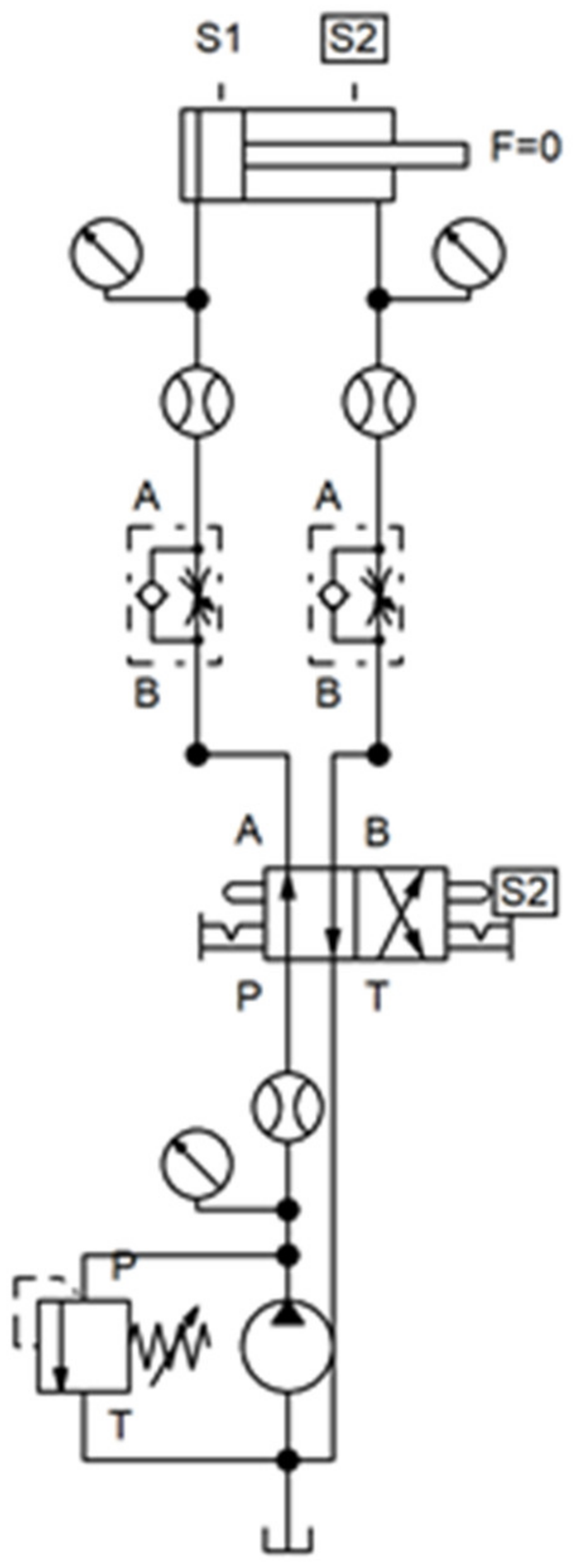
3.2. Braking through a Throttle Check Valve with an Adjustable Gap Size
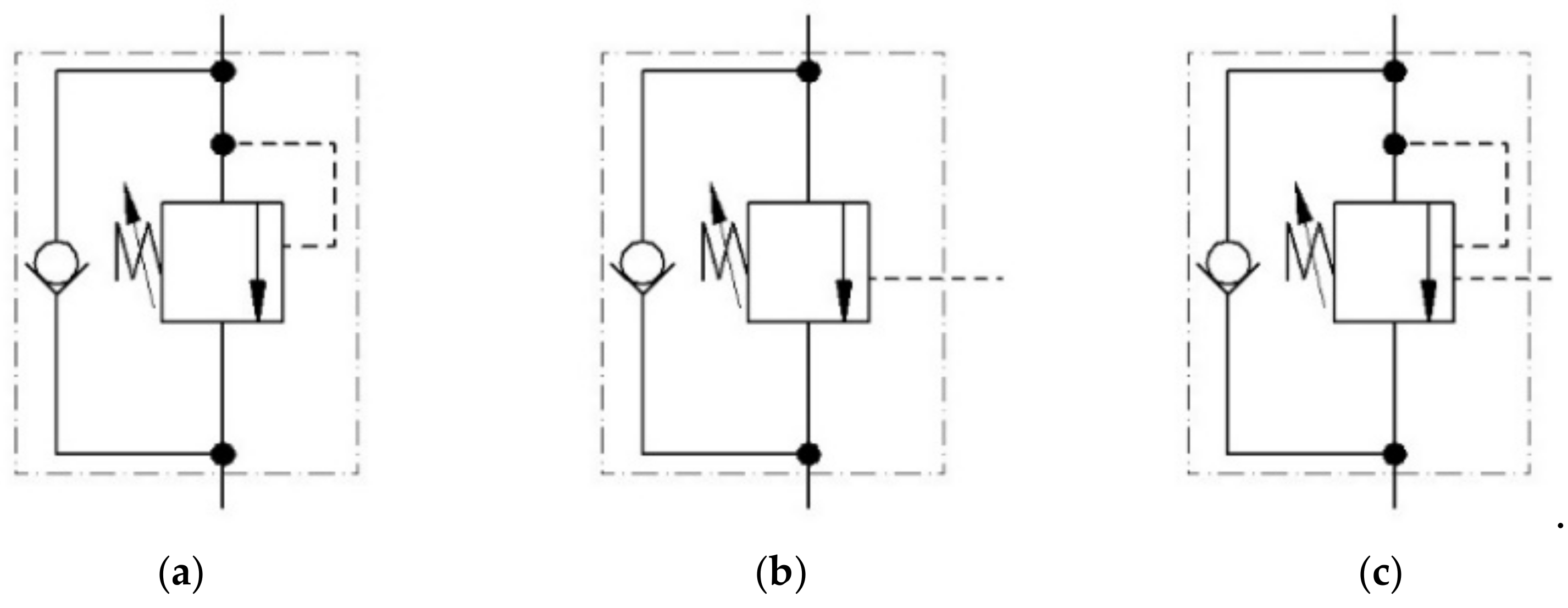
3.3. Braking with a Pressure-Controlled Check Valve
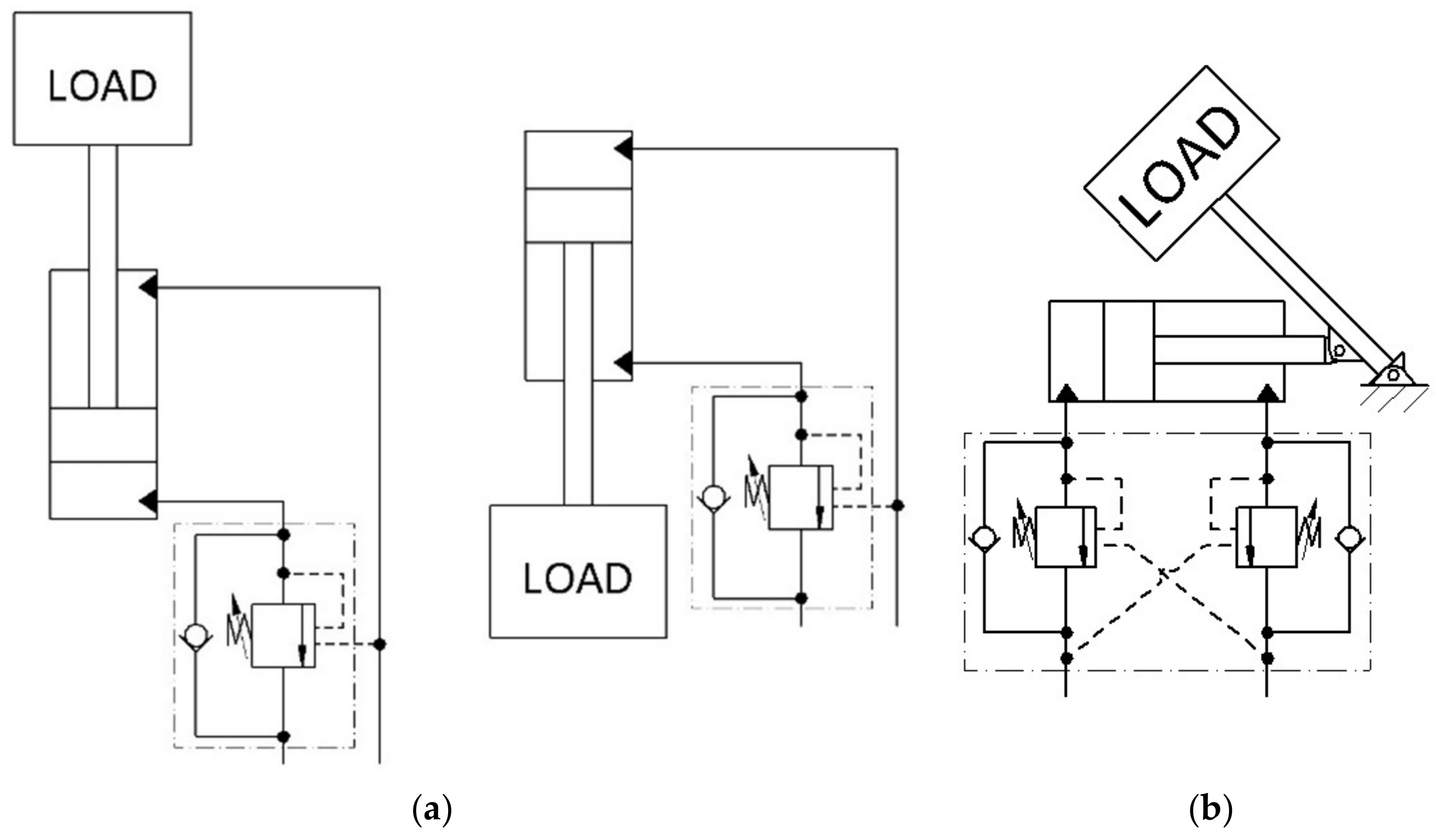
3.4. Braking with a Counterbalance Valve
4. Electronic Control Methods
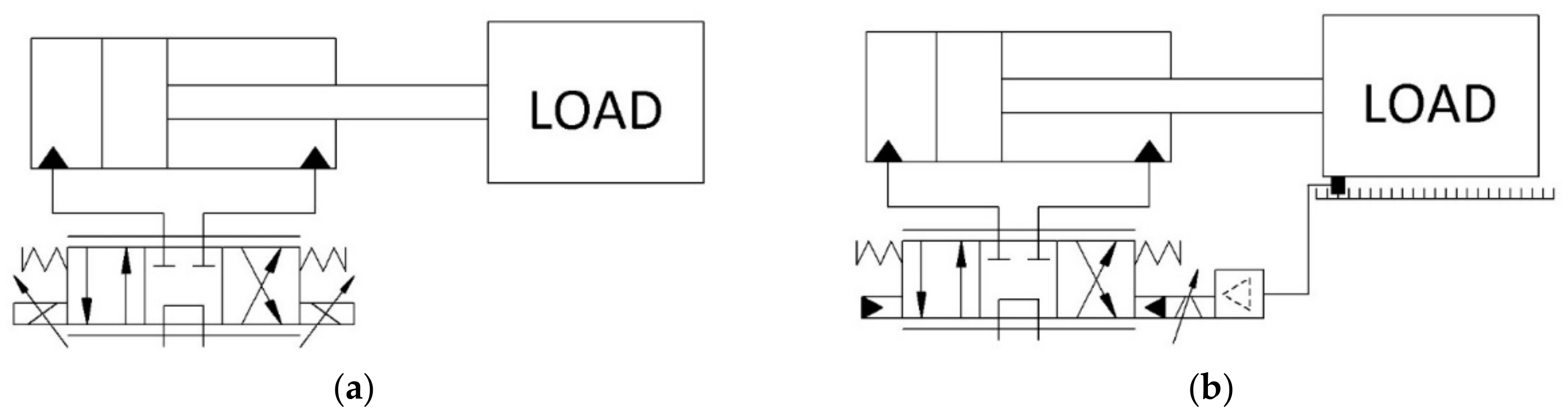
4.1. Braking with a Proportional Valve and Servo Valve
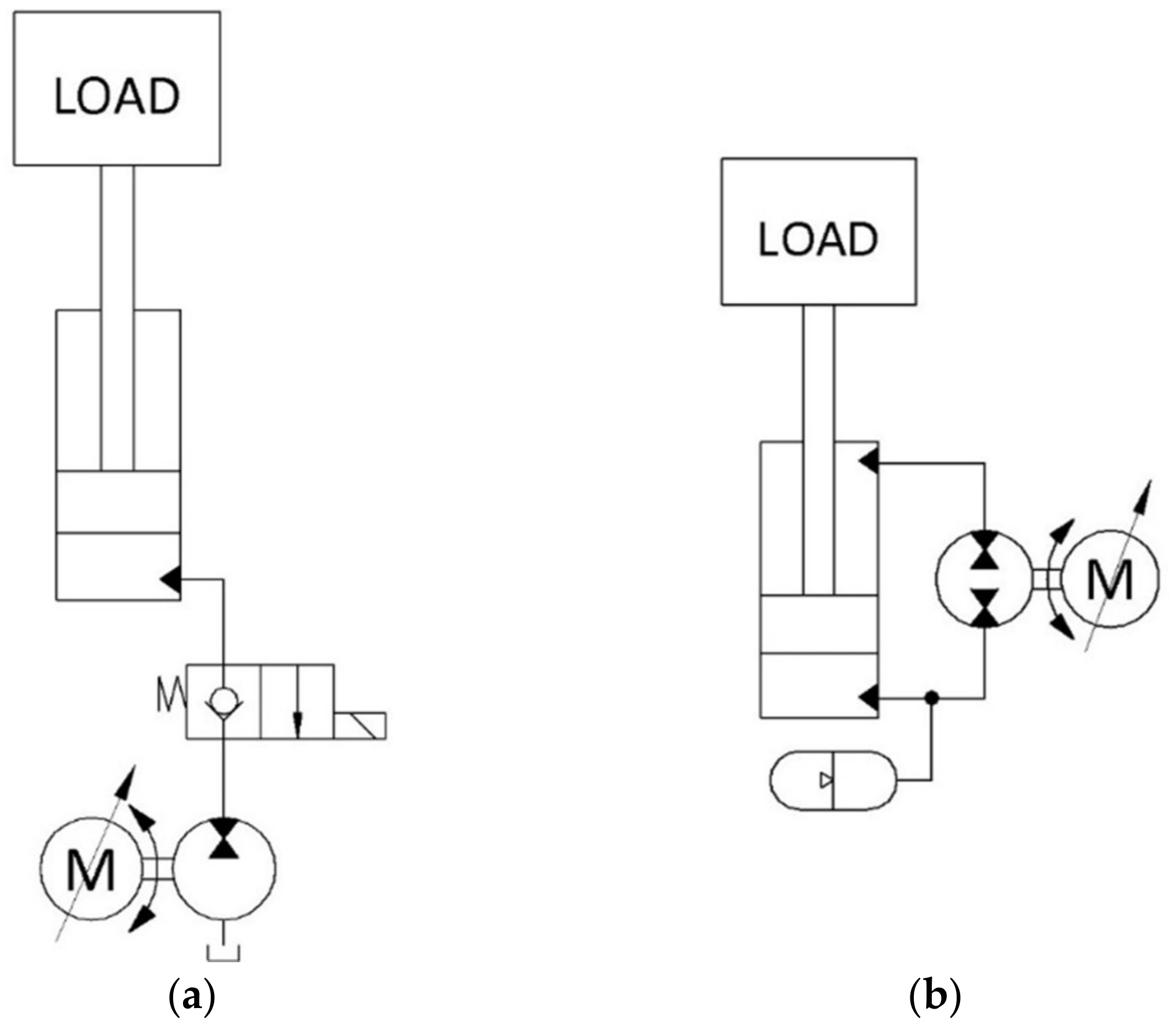
4.2. Braking with a Frequency Inverter
5. Comparison of Methods of Braking Piston Rods
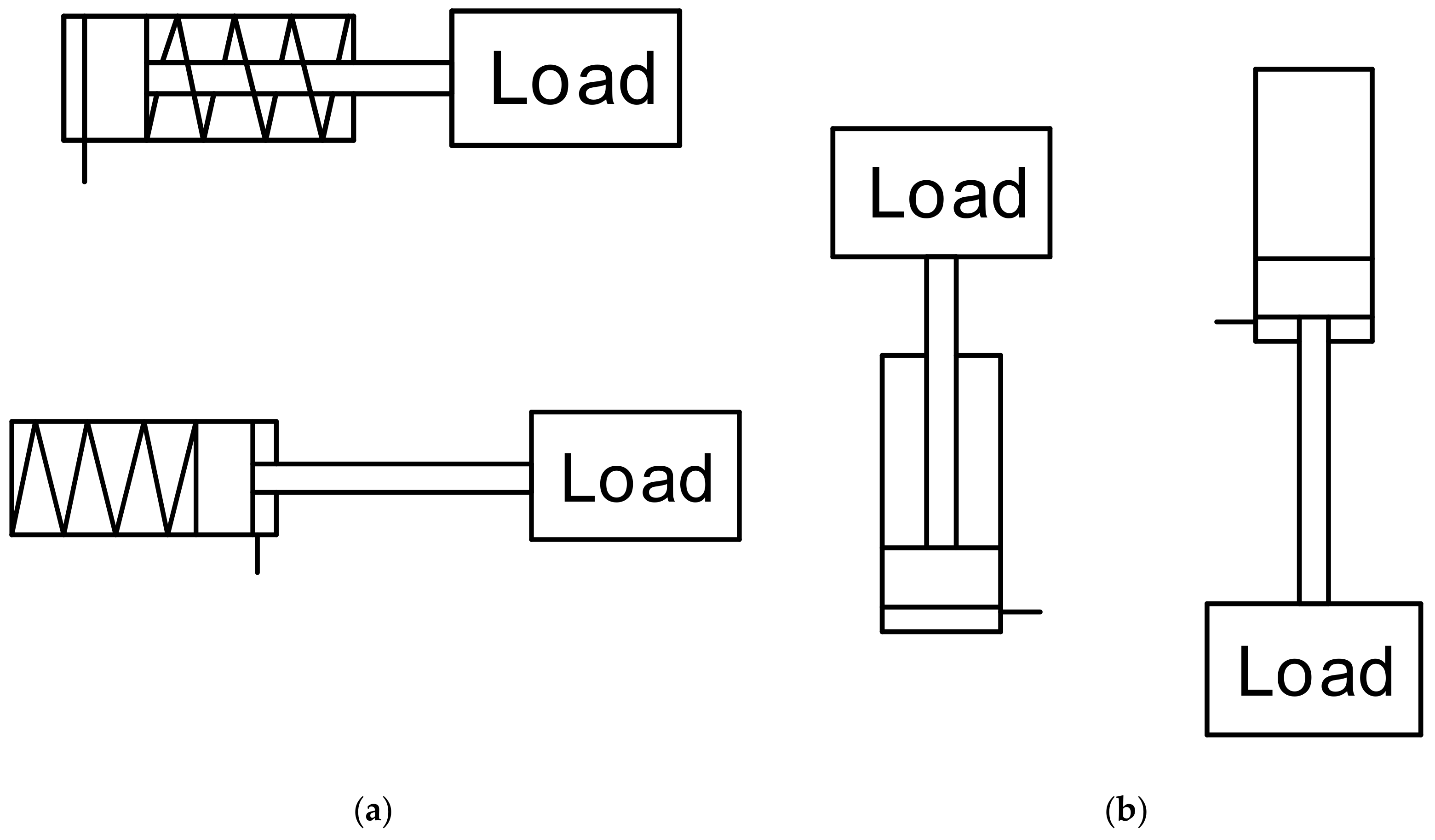
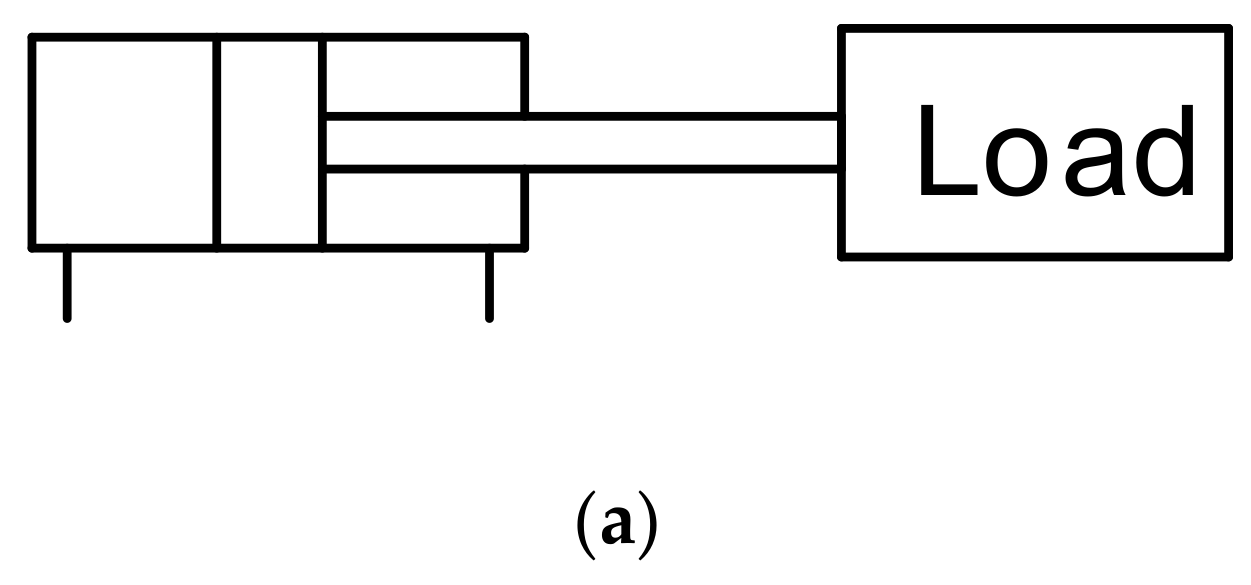
- Actuator type (single or double-acting);
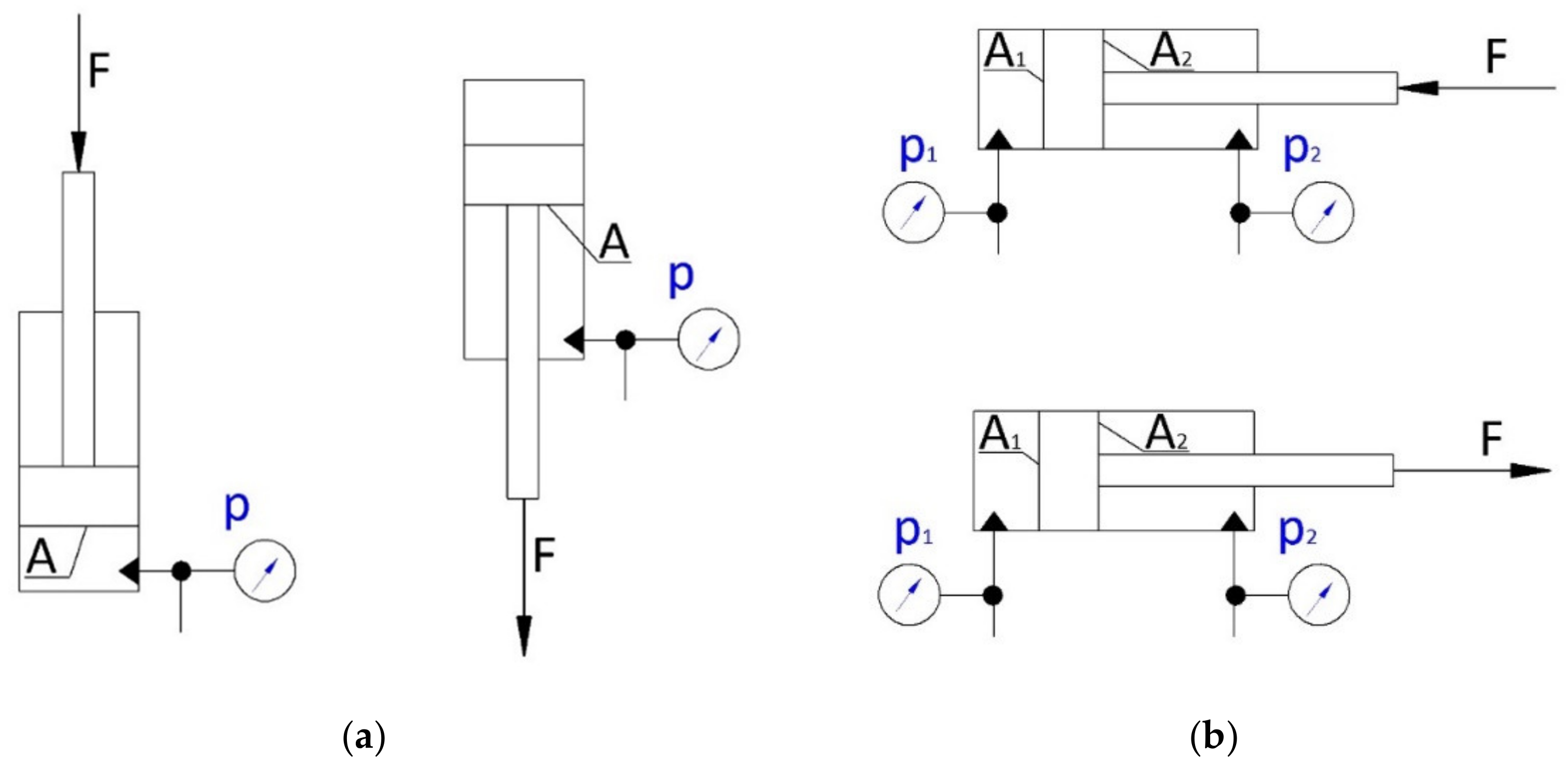
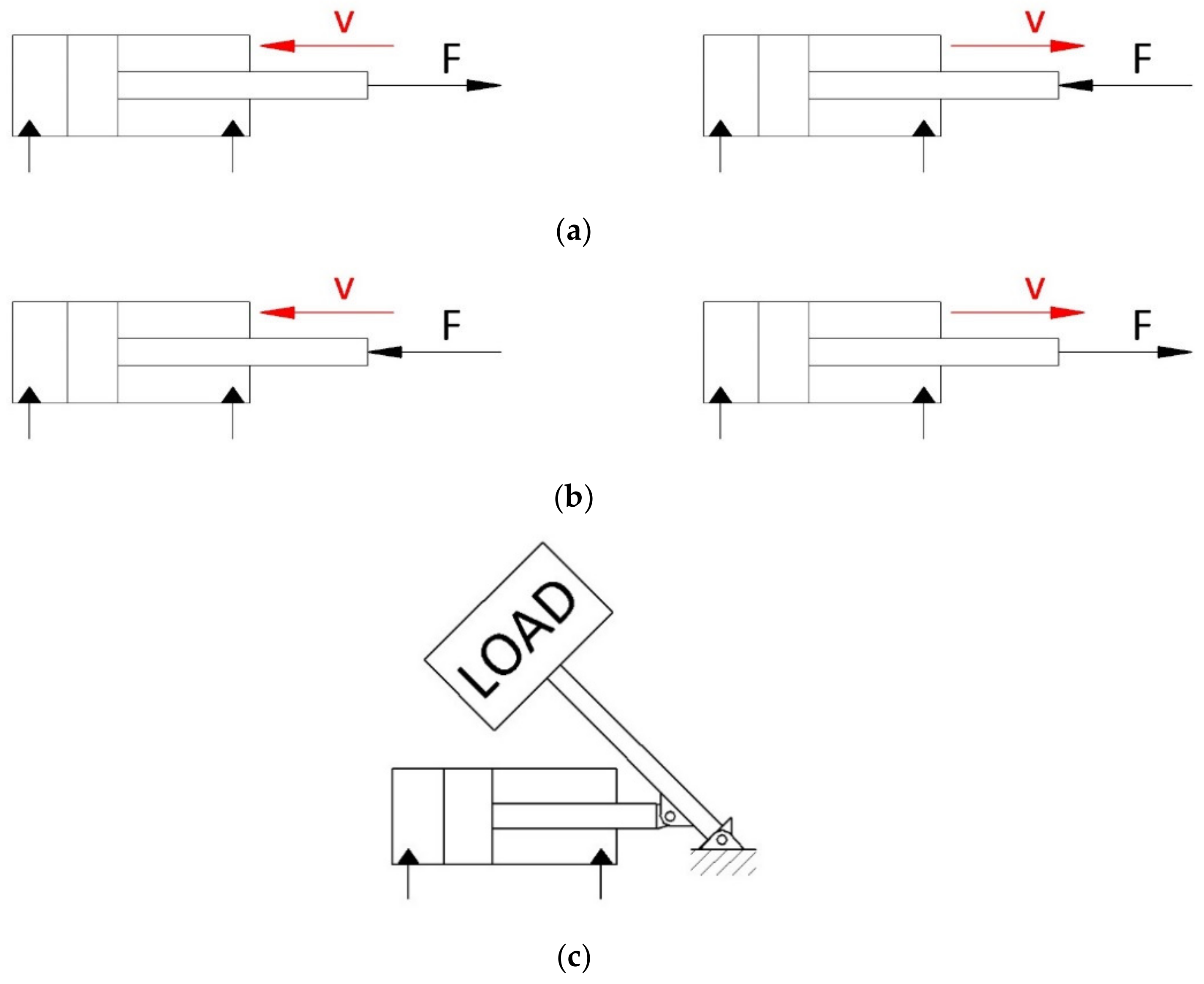
- Type of load acting on the piston rod (passive, active, variable);
- Energy consumption and with the possibility of energy recovery.
5.1. Actuator Type Comparison
5.2. Load Conditions Comparison
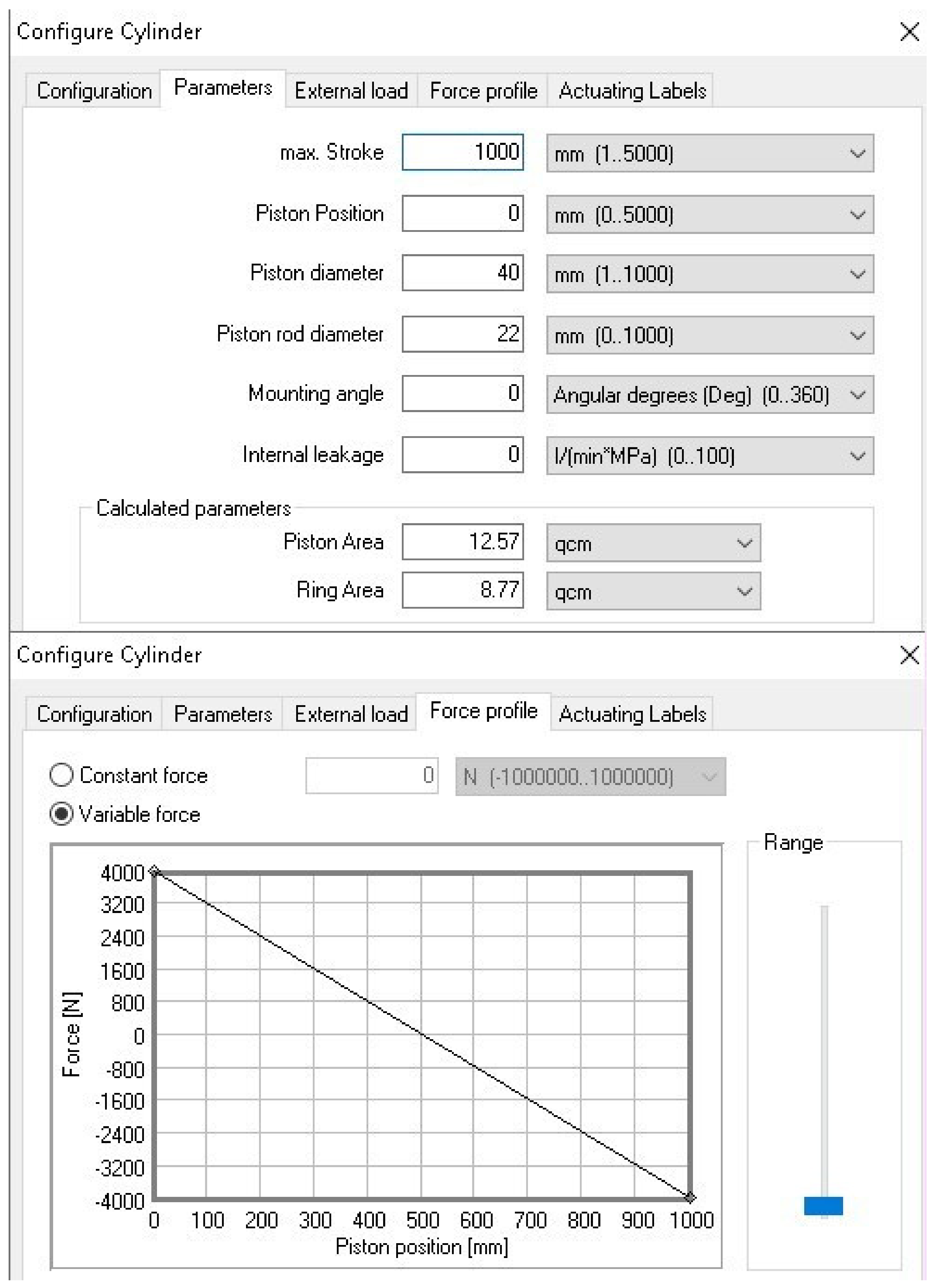
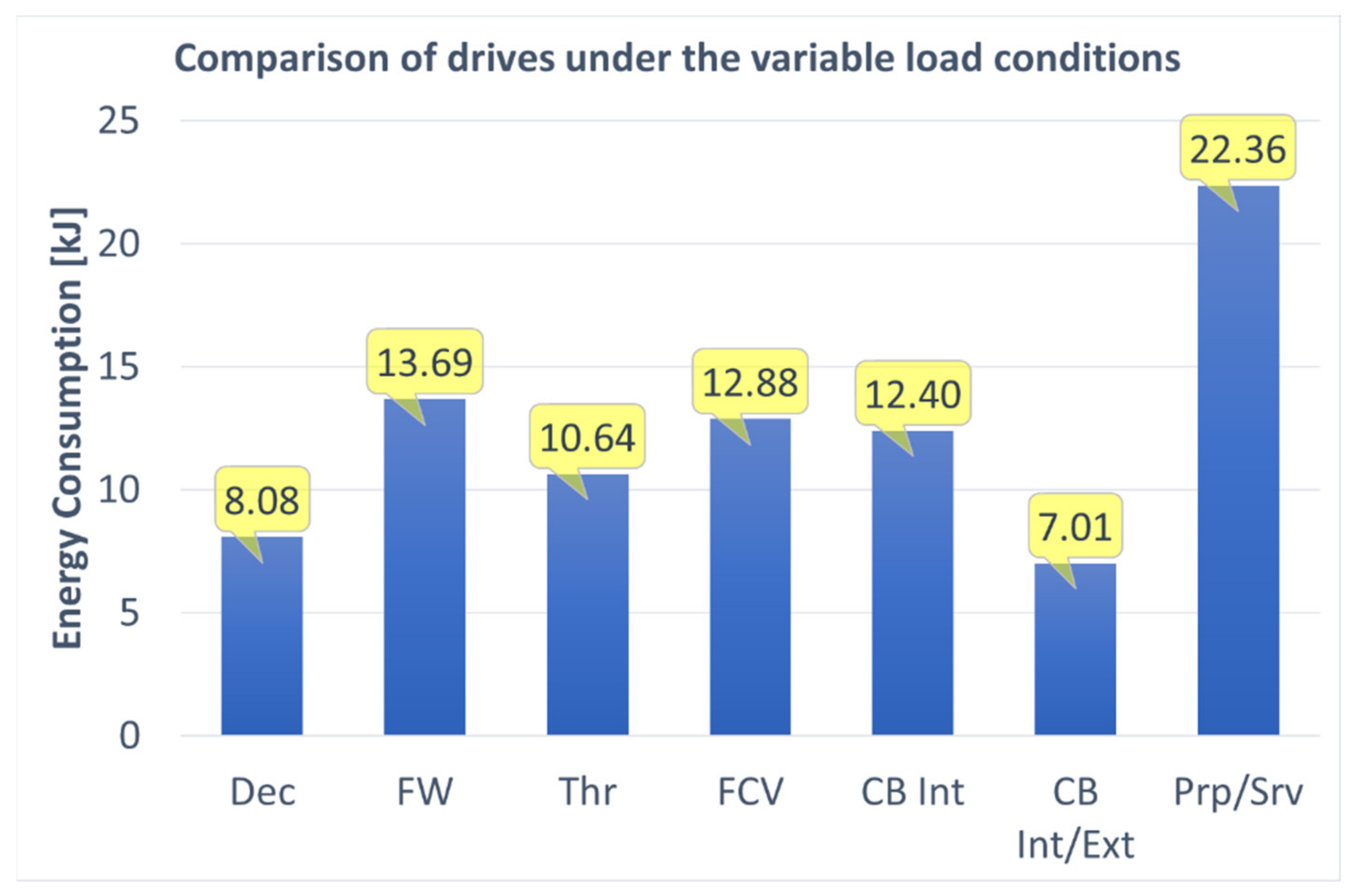
5.3. Energy Consumption Comparison
- No negative pressure in the actuator chambers;
- Setup of the elements for the lowest possible energy losses;
- Maximum pressure relief valve setting: 21 MPa;
- Work cycle consisting of the maximum stroke of the piston rod in both directions with the same time needed to change the direction of the actuator.
5.4. Energy Recovery Comparison
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Osiecki, A. Hydrostatyczny Napęd Maszyn, 2nd ed.; WNT: Warsaw, Poland, 2004. (In Polish) [Google Scholar]
- Cylinders. Hydraulics & Pneumatics 2016. Available online: https://www.hydraulicspneumatics.com/technologies/cylinders-actuators/whitepaper/21886842/cylinders-pdf-download (accessed on 25 November 2020).
- Menchen, P. Analiza nierównomierności ruchu tłoka siłownika hydraulicznego. Diagnostyka 2005, 33, 277–280. (In Polish) [Google Scholar]
- Chałamoński, M. Równomierność ruchu tłoka siłownika hydraulicznego. Diagnostyka 2004, 30, 97–100. (In Polish) [Google Scholar]
- Jędrzykiewicz, Z.; Pluta, J.; Stojek, J. Napęd i Sterowanie Hydrauliczne; Akademia Górniczo-Hutnicza im. S. Staszica, Wydział Inżynierii Mechanicznej i Robotyki: Cracow, Poland, 2004. (In Polish) [Google Scholar]
- Stryczek, S. Napęd Hydrostatyczny, 4th ed.; WNT: Warsaw, Poland, 2003; Volume 1: Elementy (ang. Elements). (In Polish) [Google Scholar]
- Rao, S.N.; Mohamed Sanaullah, A.G. Analysis and design of cushioning in hydraulic cylinders. J. Indian Inst. Sci. 1978, 60, 271–282. [Google Scholar]
- Don Norvelle, F. Fluid Power Technology, 1st ed.; West Legal Studies: Eagan, MN, USA, 1994. [Google Scholar]
- Tomasiak, E. Napędy i Sterowania Hydrauliczne i Pneumatyczne; Wydawnictwo Politechniki Śląskiej: Gliwice, Poland, 2001. (In Polish) [Google Scholar]
- Gordić, D.; Čukić, N.; Jovičič, N.; Šušteršič, V. Mathematical analysis of hydraulic cylinders with cushioning. Tract. Power Mach. 2006, 11, 86–92. [Google Scholar]
- Castilla, R.; Alemany, I.; Algar, A.; Gamez-Montero, P.J.; Roquet, P.; Codina, E. Pressure-Drop Coefficients for Cushioning System of Hydraulic Cylinder With Grooved Piston: A Computational Fluid Dynamic Simulation. Energies 2016, 10, 1704. [Google Scholar] [CrossRef] [Green Version]
- Arabkoohsar, A. Mechanical Energy Storage Technologies, 1st ed.; Academic Press: Cambridge, MA, USA, 2020. [Google Scholar]
- Olabi, A.G.; Wilberforce Awotwe, T.; Abdelkareem, M.; Ramadan, M. Critical Review of Flywheel Energy Storage System. Energies 2021, 14, 2159. [Google Scholar] [CrossRef]
- Schmidt, L.; Ketelsen, S.; Brask, M.H.; Mortensen, K.A. A Class of Energy Efficient Self-Contained Electro-Hydraulic Drives with Self-Locking Capability. Energies 2019, 12, 1866. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Zhao, J.; Zhang, X. A Novel Energy Recovery System Integrating Flywheel and Flow Regeneration for a Hydraulic Excavator Boom System. Energies 2020, 13, 315. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Zhao, J. Energy recovery for hybrid hydraulic excavators: Flywheel-based solutions. Autom. Constr. 2021, 125, 103648. [Google Scholar] [CrossRef]
- Do, T.C.; Dang, T.D.; Dinh, T.Q.; Ahn, K.K. Developments in energy regeneration technologies for hydraulic excavators: A review. Renew. Sustain. Energy Rev. 2021, 145, 111076. [Google Scholar] [CrossRef]
- Tesař, V. Fluid mechanics of needle valve with rounded components, Part I: Configurations and models. Sens. Actuators A Phys. 2017, 254, 101–108. [Google Scholar] [CrossRef]
- Khayal, O. Introduction to Hydraulic Systems. In Projects: Hydraulic and Pneumatic Circuits in Heavy Engines, Testing and Analysis of Hydraulic Machinery; Course Name: Mechatronics And Manufacturing Automation; Indian Institute of Technology Guwahati: Assam, India, 2013; Available online: https://nptel.ac.in/courses/112/103/112103174/ (accessed on 20 November 2021).
- Beater, P. Pneumatic Drives: System Design, Modelling and Control; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar] [CrossRef]
- Stryczek, S. Napęd Hydrostatyczny, 4th ed.; WNT: Warsaw, Poland, 2003; Volume 2: Układy (ang. Systems). (In Polish) [Google Scholar]
- Totten, G.E.; De Negri, V.J. Handbook of Hydraulic Fluid Technology, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Cundiff, J.S.; Kocher, M.F. Fluid Power Circuits and Control. In Fundamentals and Applications, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Wang, S.; Tomovic, M.; Liu, H. Aircraft Hydraulic Systems. In Aerospace Engineering: Commercial Aircraft Hydraulic Systems; Elsevier: Amsterdam, The Netherlands, 2016; pp. 53–114. [Google Scholar] [CrossRef]
- Stawiński, Ł. Układy hydrauliczne do napędu siłowników przy zmiennym kierunku obciążenia tłoczyska. Hydraul. I Pneumatyka 2011, 4, 17–20. (In Polish) [Google Scholar]
- Ayers, H. Understanding Counterbalance Valves. Hydraulics & Pneumatics. 2018. Available online: https://www.hydraulicspneumatics.com/technologies/hydraulic-valves/article/21887669/understanding-counterbalance-valves (accessed on 25 November 2021).
- Zaehe, B.; Herbert, D. New Energy Saving Counterbalance Valve. SAE Int. J. Commer. Veh. 2015, 8, 583–589. [Google Scholar] [CrossRef]
- Yeming, Y.; Zhou, H.; Chen, Y.; Yang, H. Stability Analysis of a Pilot Operated Counterbalance Valve for a Big Flow Rate. In Proceedings of the ASME/BATH 2014 Symposium on Fluid Power and Motion Control, Bath, UK, 10–12 September 2014. [Google Scholar] [CrossRef]
- Understanding Pressure-Control Valves. Hydraulics & Pneumatics 2019. Available online: https://www.hydraulicspneumatics.com/technologies/hydraulic-valves/article/21887951/understanding-pressurecontrol-valves (accessed on 25 November 2021).
- Stawiński, Ł. Experimental and modeling studies of hydrostatic systems with the counterbalance valves which are used in hydraulic lifting systems with passive and active load. Eksploat. I Niezawodn. Maint. Reliab. 2016, 18, 406–412. [Google Scholar] [CrossRef]
- Counterbalance Valve Circuits. Hydraulics & Pneumatics 2008. Available online: https://www.hydraulicspneumatics.com/technologies/other-technologies/article/21883651/book-2-chapter-5-counterbalance-valve-circuits (accessed on 21 November 2021).
- Pascal’s Law and Counterbalance Valves: Part 1. Fluid Power Journal. 2019. Available online: https://fluidpowerjournal.com/pascals-law-counterbalance-valves-part-1/ (accessed on 21 November 2020).
- Trinkel, B. Sequence Valves and Reducing Valves. Hydraulics & Pneumatics 2007. Available online: https://www.hydraulicspneumatics.com/technologies/other-technologies/article/21884184/chapter-14-sequence-valves-and-reducing-valves (accessed on 20 November 2021).
- Padovani, D.; Rundo, M.; Altare, G. The Working Hydraulics of Valve-Controlled Mobile Machines: Classification and Review. J. Dyn. Syst. Meas. Control 2020, 142, 142. [Google Scholar] [CrossRef]
- Marusak, P.M.; Kuntanapreeda, S. Constrained model predictive force control of an electrohydraulic actuator. Control Eng. Pract. 2011, 19, 62–73. [Google Scholar] [CrossRef]
- Rigatos, G.; Abbaszadeh, M.; Siano, P.; Cuccurullo, G. Nonlinear optimal control of electro-hydraulic actuators. IFAC J. Syst. Control 2021, 15, 100130. [Google Scholar] [CrossRef]
- Xiao, L.; Lu, B.; Yu, B.; Ye, Z. Cascaded sliding mode force control for a single-rod electrohydraulic actuator. Neurocomputing 2015, 156, 117–120. [Google Scholar] [CrossRef]
- Guo, Q.; Zuo, Z.; Ding, Z. Parametric adaptive control of single-rod electrohydraulic system with block-strict-feedback model. Automatica 2020, 113, 108807. [Google Scholar] [CrossRef]
- Cao, B.; Liu, X.; Chen, W.; Tan, P.; Niu, P. Intelligent Operation of Wheel Loader Based on Electrohydraulic Proportional Control. Math. Probl. Eng. 2020, 2020, 1–11. [Google Scholar] [CrossRef]
- Fung, R.F.; Yang, R.T. Application of VSC in position control of a nonlinear electrohydraulic servo system. Comput. Struct. 1998, 66, 365–372. [Google Scholar] [CrossRef]
- Sang, Y.; Sun, W.; Duan, F.; Zhao, J. Bidirectional synchronization control for an electrohydraulic servo loading system. Mechatronics 2019, 62, 102254. [Google Scholar] [CrossRef]
- Davliakos, I.; Papadopoulos, E. Impedance Model-based Control for an Electrohydraulic Stewart Platform. Eur. J. Control 2009, 15, 560–577. [Google Scholar] [CrossRef]
- Kauranne, H.; Koitto, T.; Calonius, O.; Minav, T.; Pietola, M. Direct Driven Pump Control of Hydraulic Cylinder for Rapid Vertical Position Control of Heavy Loads: Energy Efficiency Including Effects of Damping and Load Compensation. In Proceedings of the BATH/ASME 2018 Symposium on Fluid Power and Motion Control, Bath, UK, 12–14 September 2018. [Google Scholar] [CrossRef]
- Rydberg, K.E. Energy Efficient Hydraulics–System Solutions for Minimizing Losses. In Proceedings of the National Conference on Fluid Power, Linköping University, Linköping, Sweden, 16–17 March 2015. [Google Scholar]
- Hagen, D.; Padovani, D.; Choux, M. Guidelines to Select Between Self-Contained Electro-Hydraulic and Electro-Mechanical Cylinders. In Proceedings of the 15th IEEE Conference on Industrial Electronics and Applications, Kristiansand, Norway, 9–13 November 2020. [Google Scholar] [CrossRef]
- Stawiński, Ł.; Zaczynski, J.; Morawiec, A.; Skowronska, J.; Kosucki, A. Energy Consumption Structure and Its Improvement of Low-Lifting Capacity Scissor Lift. Energies 2021, 14, 1366. [Google Scholar] [CrossRef]
- Ketelsen, S.; Padovani, D.; Andersen, T.; Ebbesen, M.; Schmidt, L. Classification and Review of Pump-Controlled Differential Cylinder Drives. Energies 2019, 12, 1293. [Google Scholar] [CrossRef] [Green Version]
- Hagen, D.; Padovani, D.; Choux, M. A Comparison Study of a Novel Self-Contained Electro-Hydraulic Cylinder versus a Conventional Valve-Controlled Actuator—Part 1: Motion Control. Actuators 2019, 8, 79. [Google Scholar] [CrossRef] [Green Version]
- Ahn, K.K.; Yoon, J.; Dinh, T. Design and Verification of a New Energy Saving Electric Excavator. In Proceedings of the 28th International Symposium on Automation and Robotics in Construction, Seoul, Korea, 29 June–2 July 2011. [Google Scholar] [CrossRef] [Green Version]
- Heikkinen, J.; Minav, T.; Pietola, M. Electric-driven Zonal Hydraulics in Non-Road Mobile Machinery. In New Applications of Electric Drives; Miroslav, C., Ed.; IntechOpen: London, UK, 2015. [Google Scholar] [CrossRef] [Green Version]
- Niraula, A.; Zhang, S.; Minav, T.; Pietola, M. Effect of Zonal Hydraulics on Energy Consumption and Boom Structure of a Micro-Excavator. Energies 2018, 11, 2088. [Google Scholar] [CrossRef] [Green Version]
- Hagen, D.; Padovani, D.; Choux, M. A Comparison Study of a Novel Self-Contained Electro-Hydraulic Cylinder versus a Conventional Valve-Controlled Actuator—Part 2: Energy Efficiency. Actuators 2019, 8, 78. [Google Scholar] [CrossRef] [Green Version]
- Pedersen, N.H.; Johansen, P.; Schmidt, L.; Scheidl, R.; Andersen, T. Control and Performance Analysis of a Digital Direct Hydraulic Cylinder Drive. Int. J. Fluid Power 2020, 295–322. [Google Scholar] [CrossRef]
- Zhang, Y.; Alleyne, A.G.; Zheng, D. A hybrid control strategy for active vibration isolation with electrohydraulic actuators. Control Eng. Pract. 2005, 13, 279–289. [Google Scholar] [CrossRef]
- Huang, L.; Yu, T.; Jiao, Z.; Li, Y. Active Load-Sensitive Electro-Hydrostatic Actuator for More Electric Aircraft. Appl. Sci. 2020, 10, 6978. [Google Scholar] [CrossRef]
- Wang, M.; Wang, Y.; Fu, Y.; Yang, R.; Zhao, J.; Fu, J. Experimental Investigation of an Electro-Hydrostatic Actuator Based on the Novel Active Compensation Method. IEEE Access 2020, 8, 170635–170649. [Google Scholar] [CrossRef]
- Jinxing, S.; Hongxin, C.; Ke, F.; Hong, Z.; Huanliang, L. Parameter Identification and Control Algorithm of Electrohydraulic Servo System for Robotic Excavator Based on Improved Hammerstein Model. Math. Probl. Eng. 2020, 2020, 1–9. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Single-Acting | Double-Acting | Passive Load | Active Load | Variable Load |
|---|---|---|---|---|---|
| Cushioning | Yes | Yes | Yes | No | No |
| Dec | Yes | Yes | Yes | Yes | Yes |
| FW | Yes | Yes | Yes | Yes | Yes |
| Thr | Yes | Yes | Yes | Meter-Out | Meter-Out |
| 2W FCV | Yes | Yes | Yes | Meter-Out | Meter-Out |
| 3W FCV | Yes | Yes | Yes | No | No |
| POCV | No | Yes | Yes | Yes | No |
| CB | Int | Yes | Yes | Yes | Int or Int/Ext |
| Prp/Srv | Yes | Yes | Yes | Yes | Yes |
| FI | Yes | Yes | Yes | VM | No |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stawinski, L.; Skowronska, J.; Kosucki, A. Energy Efficiency and Limitations of the Methods of Controlling the Hydraulic Cylinder Piston Rod under Various Load Conditions. Energies 2021, 14, 7973. https://doi.org/10.3390/en14237973
Stawinski L, Skowronska J, Kosucki A. Energy Efficiency and Limitations of the Methods of Controlling the Hydraulic Cylinder Piston Rod under Various Load Conditions. Energies. 2021; 14(23):7973. https://doi.org/10.3390/en14237973
Chicago/Turabian StyleStawinski, Lukasz, Justyna Skowronska, and Andrzej Kosucki. 2021. "Energy Efficiency and Limitations of the Methods of Controlling the Hydraulic Cylinder Piston Rod under Various Load Conditions" Energies 14, no. 23: 7973. https://doi.org/10.3390/en14237973
APA StyleStawinski, L., Skowronska, J., & Kosucki, A. (2021). Energy Efficiency and Limitations of the Methods of Controlling the Hydraulic Cylinder Piston Rod under Various Load Conditions. Energies, 14(23), 7973. https://doi.org/10.3390/en14237973