
Using Sine Function-Based Nonlinear Feedback to Control Water Tank Level



Abstract
:1. Introduction
2. Mathematical Model and Related Algorithms
2.1. Mathematic Modeling and Determination of PID Parameters
2.2. Adhibition of Robust PID Control: Case Study of Controlling
2.2.1. Mathematical Modeling
2.2.2. Controller Design on Account of Closed-Loop Gain Algorithm
3. Stability Analysis and Mathematical Proof of Proposed Controller
- (1)
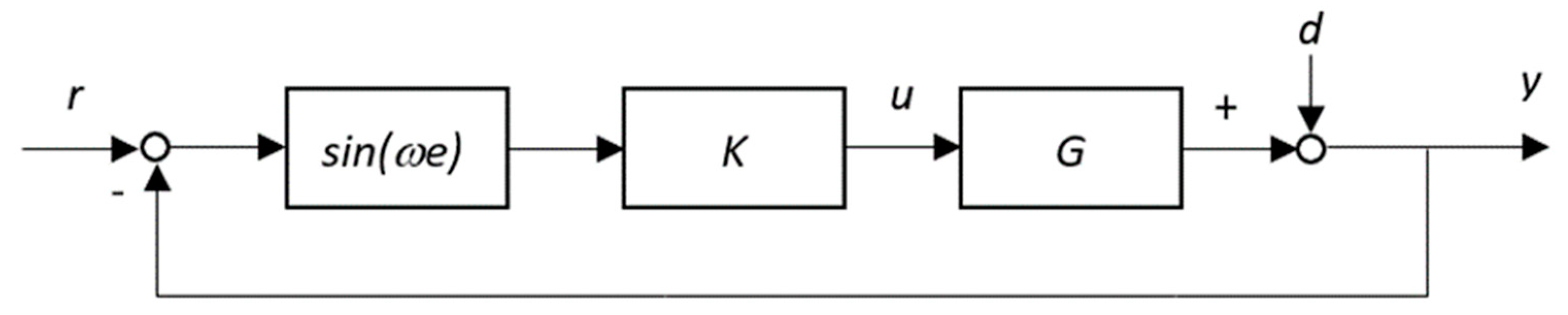
- Impact on the stability of the designed control system: in setting the water level as a step-function signal, amplitude is , the steady-state output of water level as illustrated in Figure 1 can be expressed as follows, where the amplitude is :
- (2)
- Impact on the dynamic property of the designed control system: the transfer function from input to output of the system is
- (3)
- Impact on the output of the designed control system: the transfer function from input to the steady-state value of input water flow is
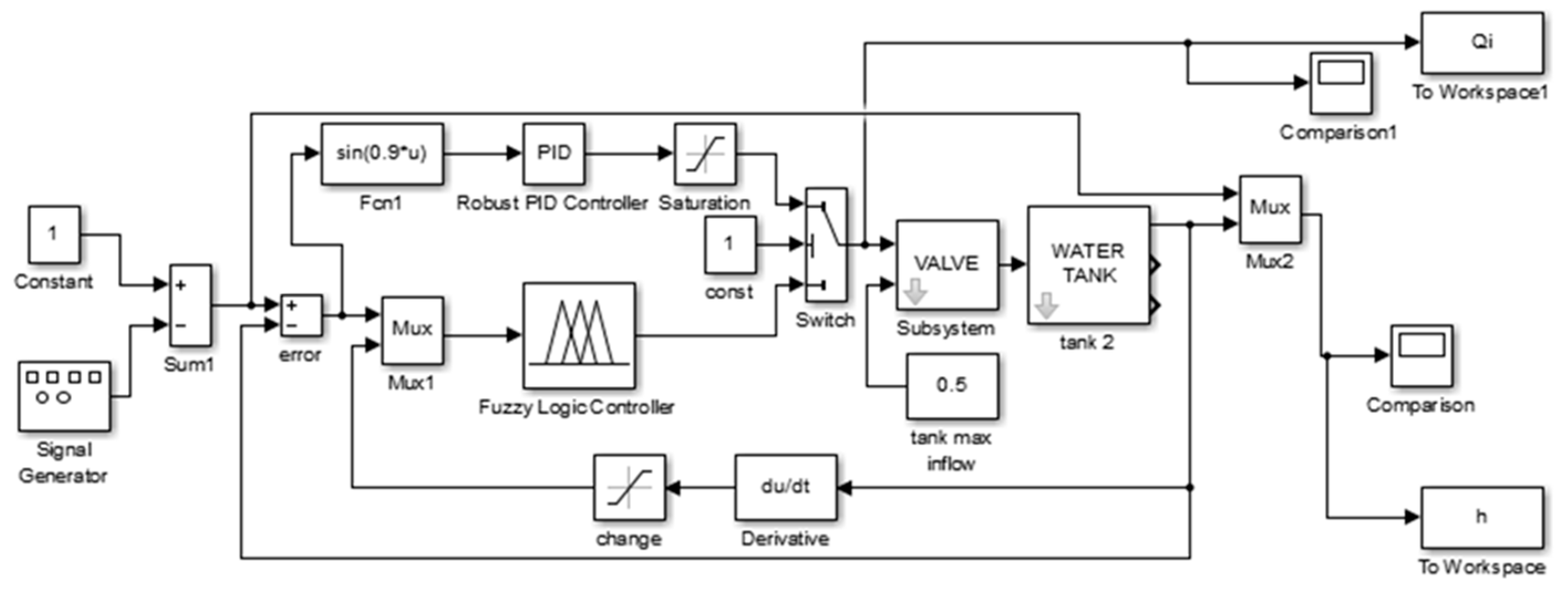
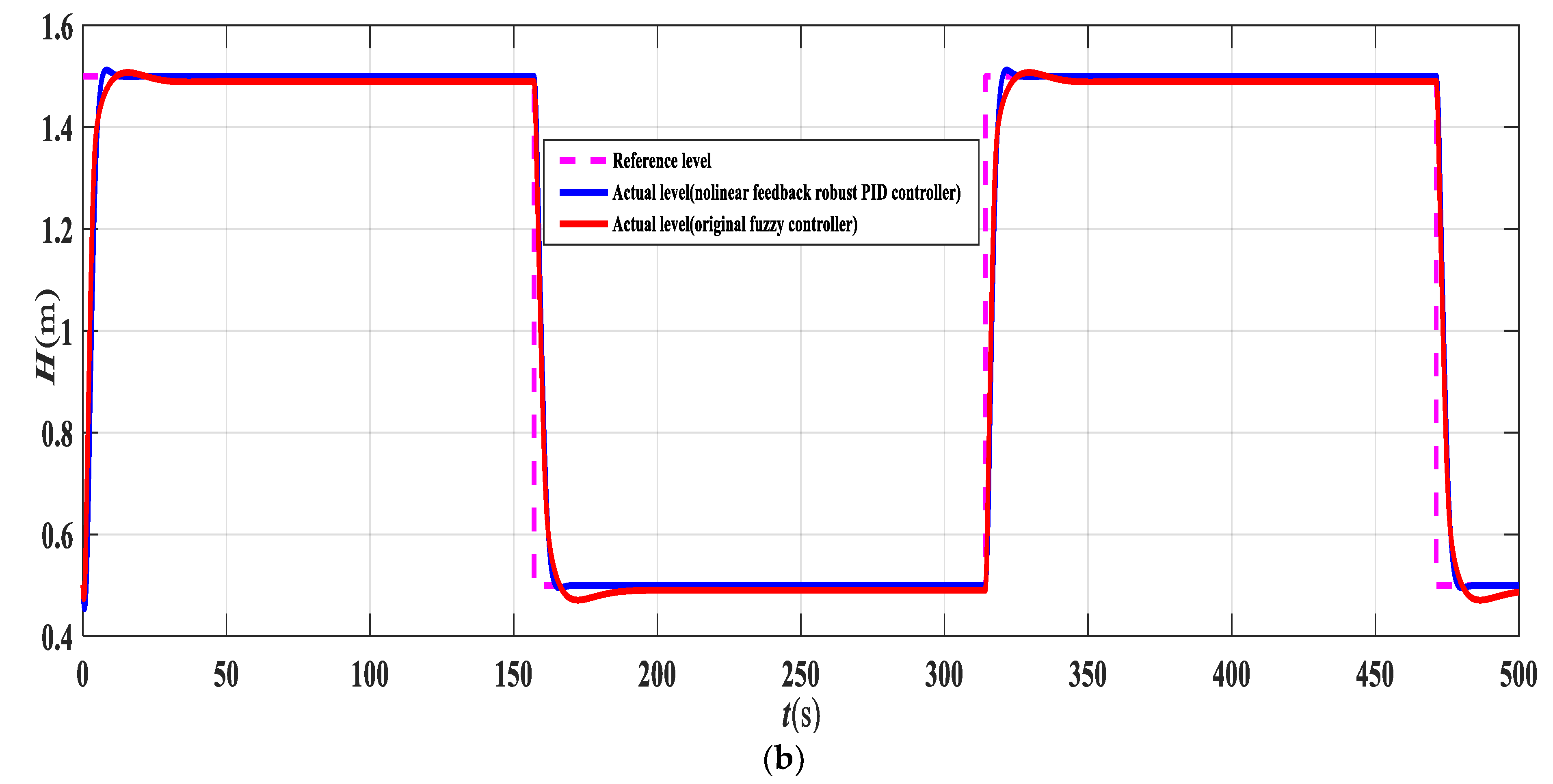
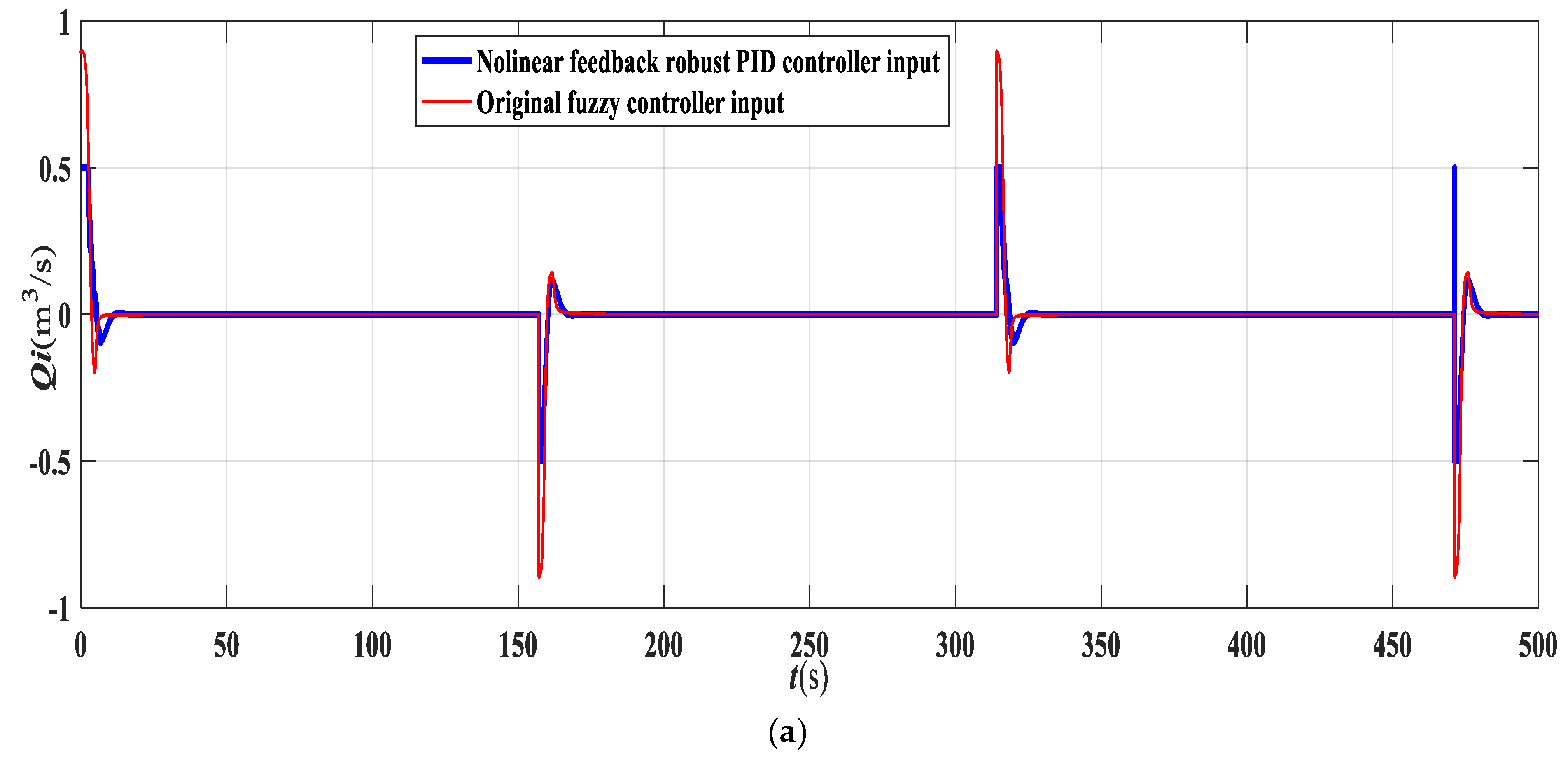
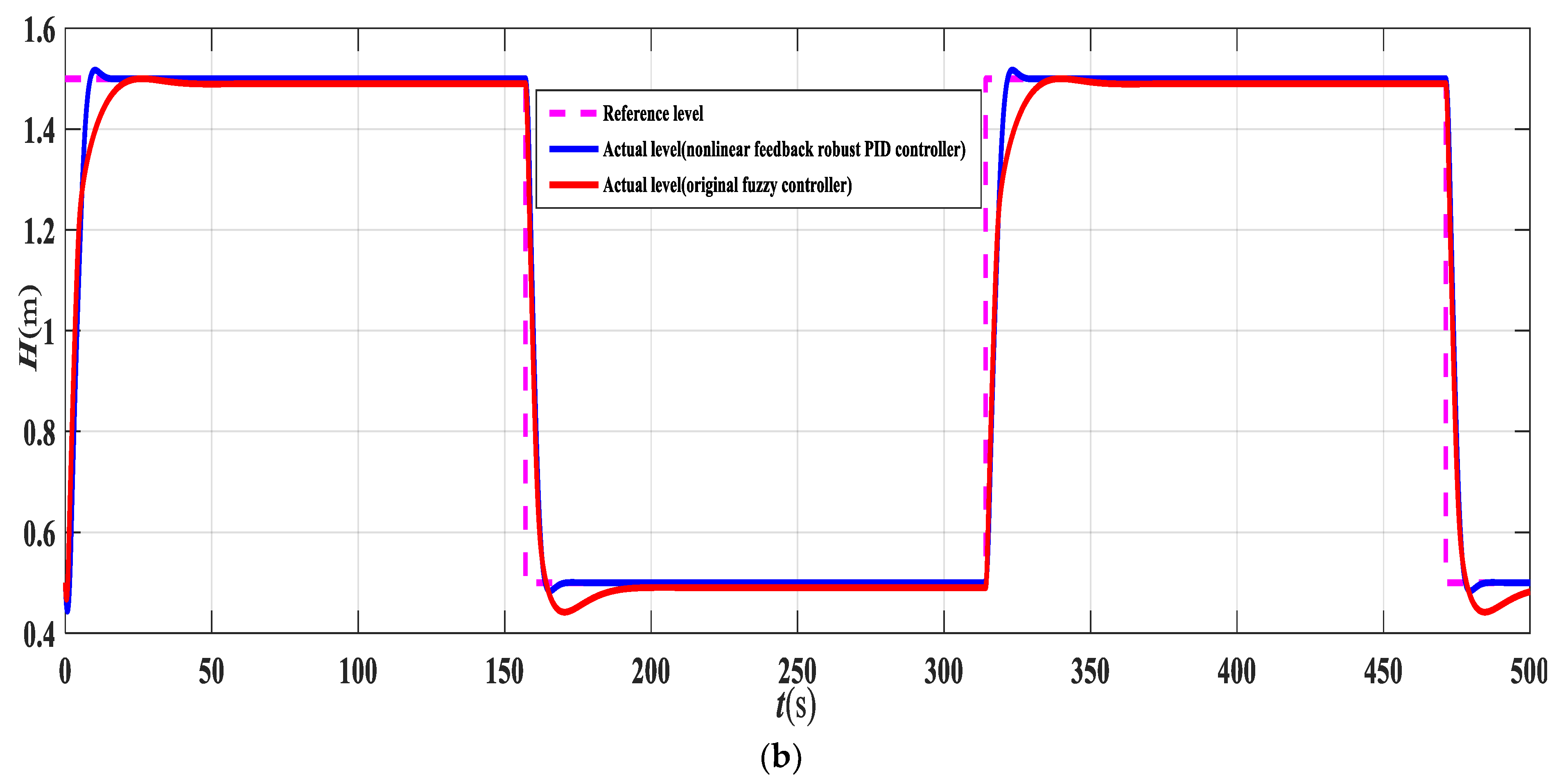
4. Simulation Experiments and Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.K. Ship Motion Concise Robust Control; Science Press: Beijing, China, 2012. [Google Scholar]
- Kokotovic, P.; Arcak, M.C. Constructive nonlinear control: A historical perspective. Automatica 2001, 37, 637–662. [Google Scholar] [CrossRef]
- Zhang, X.K.; Jin, Y.C. Control. System Modeling and Numerical Simulation (Second Edition); Dalian Maritime University Press: Dalian, China, 2013. [Google Scholar]
- Li, X.S.; Li, Z.A. The Application of Linear and Nonlinear Water Tanks Case Study in Teaching of Process Control. In IOP Conf. Series: Earth and Environmental Science. Proceedings of the 3rd International Conference on Advances in Energy Resources and Environment Engineering, Harbin, China, 8–10 December 2017; IOP Publishing: Bristol, UK, 2018. [Google Scholar]
- Robert, B.; Marian, B.; Rafal, G. A New Look at Water Tanks Systems as Control Teaching Tools. In Proceedings of the 20th World Congress of the International-Federation-of-Automatic-Control (IFAC), Toulouse, France, 9–14 July 2017. [Google Scholar]
- Zhao, T.Y.; Li, P.; Cao, J.T. Study of Interval Type-2 Fuzzy Controller for the Twin-tank Water Level System. Chin. J. Chem. Eng. 2012, 20, 1102–1106. [Google Scholar] [CrossRef]
- Namazov, M.; Alili, A. Design of stable takagi sugeno fuzzy control system for three interconnected tank system via LMIs with constraint on the output. IFAC-Pap. OnLine 2018, 51, 721–726. [Google Scholar] [CrossRef]
- Thamallah, A.; Sakly, A.; M’sahli, F. A new constrained PSO for fuzzy predictive control of Quadruple-Tank process. Measurement 2019, 136, 93–104. [Google Scholar] [CrossRef]
- Yang, Z.J.; Sugiura, H. Robust nonlinear control of a three-tank system using finite-time disturbance observers. Control. Eng. Pract. 2019, 84, 63–71. [Google Scholar] [CrossRef]
- Zhong, X.; Peng, L.X.; Yi, C.; Zhang, J. The research on intelligent prediction algorithm for water level control of tank. J. Nonlinear Convex A 2009, 20, 1271–1281. [Google Scholar]
- Kumar, E.G.; Arunshankar, J. Control of nonlinear two-tank hybrid system using sliding mode controller with fractional-order PI-D sliding surface. Comput. Electr. Eng. 2018, 71, 953–965. [Google Scholar]
- Jiri, V.; Petr, D. Simulation of Adaptive LQ Control of Nonlinear Process. Stud. Inf. Control 2012, 20, 215–324. [Google Scholar]
- Sarailoo, M.; Rahmani, Z.; Rezaie, B. A novel model predictive control scheme based on bees algorithm in a class of nonlinear systems: Application to a three tank system. Neurocomputing 2015, 152, 294–304. [Google Scholar] [CrossRef]
- Arkadiusz, M.; Argyrios, Z. Plc-based discrete fractional-order control design for an industrial-oriented water tank volume system with input delay. Fract. Calc. Appl. Anal. 2018, 21, 1005–1026. [Google Scholar]
- Prasanta, R.; Kar, B.; Roy, B.K. Fractional Order PI-PD Control of Liquid Level in Coupled Two Tank System and its Experimental Validation. Asian J. Control 2017, 19, 1699–1709. [Google Scholar]
- Guan, W.; Cao, J.; Su, Z. Steering Controller Design for Smart Autonomous Surface Vessel Based on CSF L2 Gain Robust Strategy. IEEE Access 2019, 7, 109982–109989. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, X.K. Nonlinear Improved Concise Backstepping Control of Course Keeping for Ships. IEEE Access 2019, 7, 19258–19265. [Google Scholar] [CrossRef]
- Dong, Z.; Bao, M.; Zheng, X.; Yang, X.; Song, L.; Mao, Y. Heading Control of Unmanned Marine Vehicles Based on an Improved Robust Adaptive Fuzzy Neural Network Control Algorithm. IEEE Access 2019, 7, 9704–9713. [Google Scholar] [CrossRef]
- Tian, Y.; Wang, B.; Chen, D.; Wang, S.; Chen, P.; Yang, Y. Design of a Nonlinear Predictive Controller for a Fractional-Order Hydraulic Turbine Governing System with Mechanical Time Delay. Energies 2019, 12, 4727. [Google Scholar] [CrossRef] [Green Version]
- Ha, L.N.N.T.; Bui, D.H.P.; Hong, S.K. Nonlinear Control for Autonomous Trajectory Tracking While Considering Collision Avoidance of UAVs Based on Geometric Relations. Energies 2019, 12, 1551. [Google Scholar] [CrossRef] [Green Version]
- Rodríguez-Licea, M.-A.; Pérez-Pinal, F.-J.; Nuñez-Perez, J.-C.; Herrera-Ramirez, C.-A. Nonlinear Robust Control for Low Voltage Direct-Current Residential Microgrids with Constant Power Loads. Energies 2018, 11, 1130. [Google Scholar] [CrossRef] [Green Version]
- Zhang, R.F.; Chen, D.Y.; Ma, X.Y. Nonlinear Predictive Control of a Hydropower System Model. Entropy 2015, 17, 6129–6149. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.K.; Jin, Y.C. Robust PID controller based on closed-loop gain shaping algorithm and its application. In Proceedings of the International Conference on Machine Learning and Cybernetics, Baoding, China, 12–15 July 2009. [Google Scholar]
- Zhang, X.K.; Jia, X.L. Robust PID Algorithm based on Closed-loop Gain Shaping and its application on level control. Shipbuild. China 2000, 41, 35–38. [Google Scholar]
- Roger, J. Fuzzy Toolbox in Matlab Manuel; The Math Works, Inc.: Natick, MA, USA, 1998. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Item | Parameter |
|---|---|---|
| 1 | Height of tank | 2 m |
| 2 | Area of tank base | 1 m2 |
| 3 | Cross-sectional area of the pipe | 0.05 m2 |
| 4 | Original water level | 0.5 m |
| 5 | Max inflow rate of water intake | 0.5 m3/s |
| The Maximum Inflow Rate Is 0.5 m3/s | The Maximum Inflow Rate Is 0.4 m3/s | |
|---|---|---|
| Nonlinear feedback robust PID algorithm | 456.1 | 608.9 |
| Fuzzy control algorithm | 600.0 | 651.4 |
| Variable rate to the robust PID algorithm (%) | 24.0% | 6.5% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Zhang, X.; Chen, Y.; Wang, P. Using Sine Function-Based Nonlinear Feedback to Control Water Tank Level. Energies 2021, 14, 7602. https://doi.org/10.3390/en14227602
Zhao J, Zhang X, Chen Y, Wang P. Using Sine Function-Based Nonlinear Feedback to Control Water Tank Level. Energies. 2021; 14(22):7602. https://doi.org/10.3390/en14227602
Chicago/Turabian StyleZhao, Jian, Xianku Zhang, Yilin Chen, and Pengrui Wang. 2021. "Using Sine Function-Based Nonlinear Feedback to Control Water Tank Level" Energies 14, no. 22: 7602. https://doi.org/10.3390/en14227602
APA StyleZhao, J., Zhang, X., Chen, Y., & Wang, P. (2021). Using Sine Function-Based Nonlinear Feedback to Control Water Tank Level. Energies, 14(22), 7602. https://doi.org/10.3390/en14227602