
Optimal Control Method of Variable Air Volume Terminal Unit System


Abstract
:1. Introduction
2. Type of VAV Terminal Unit System
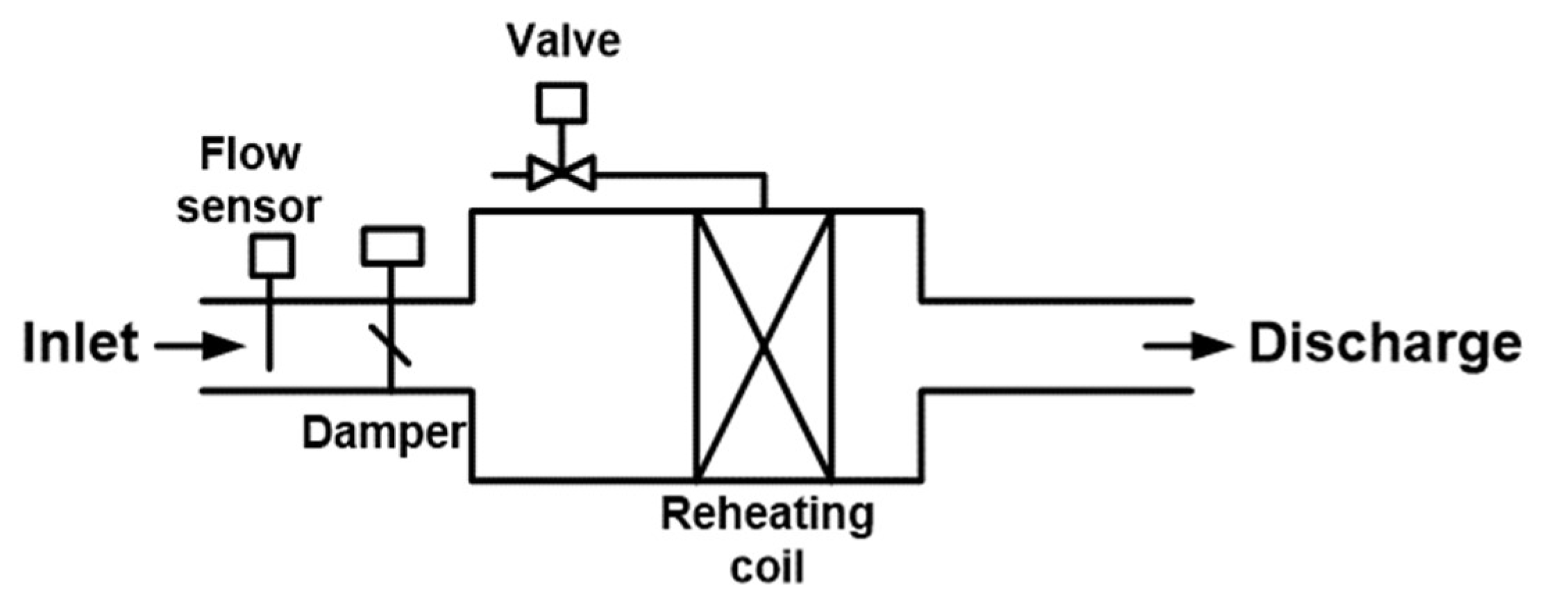
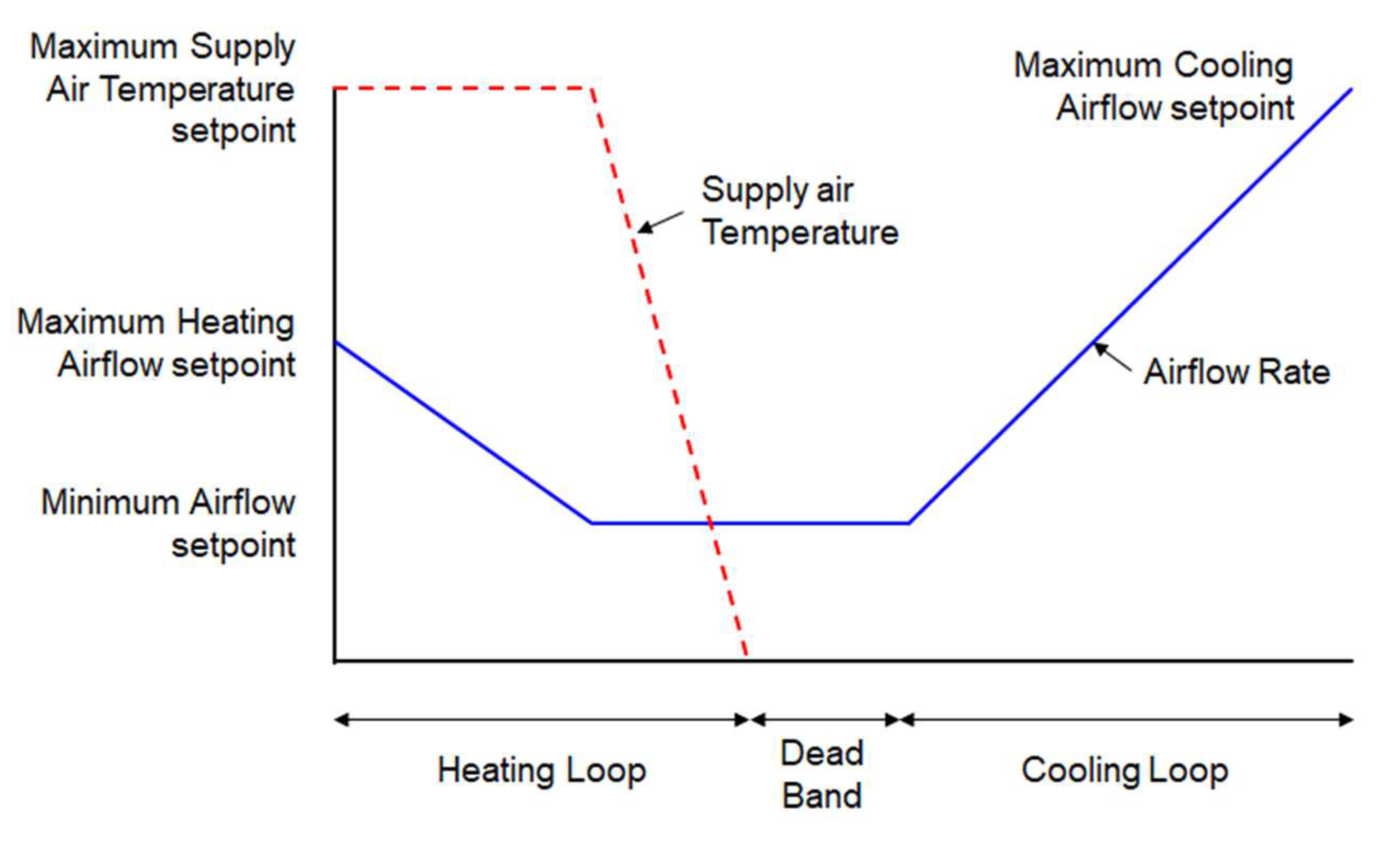
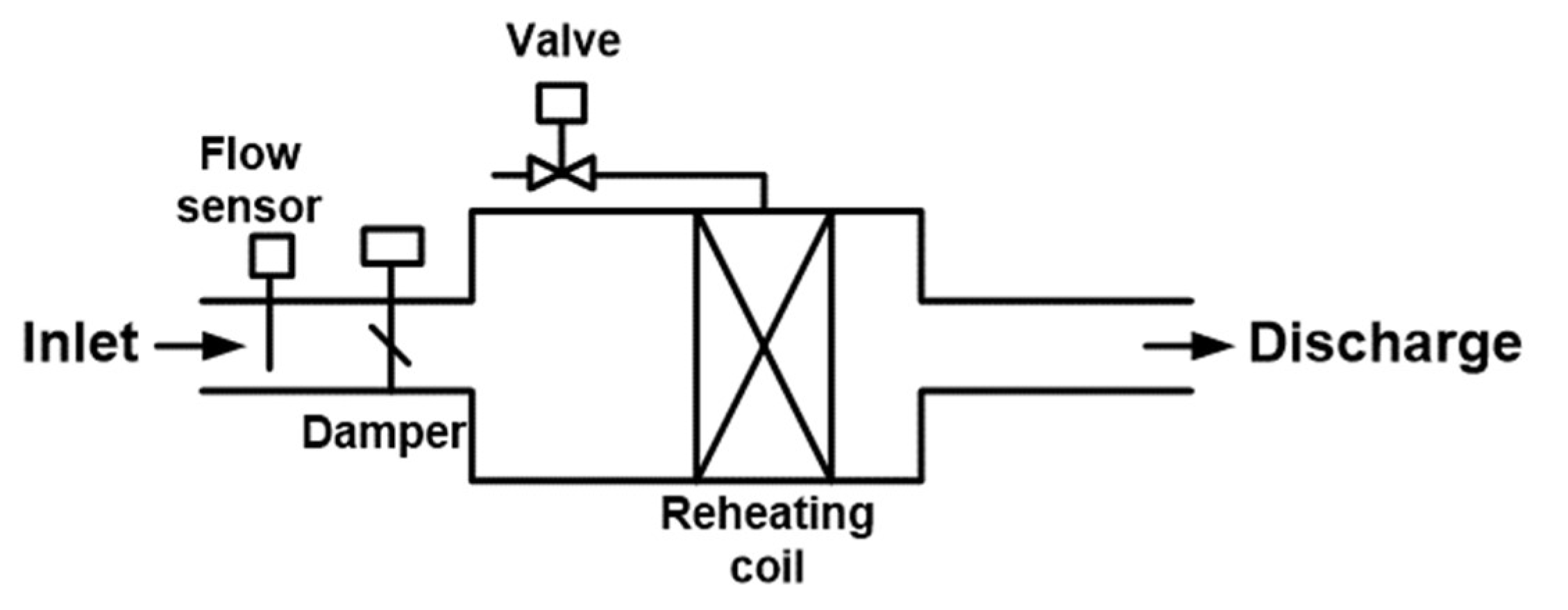
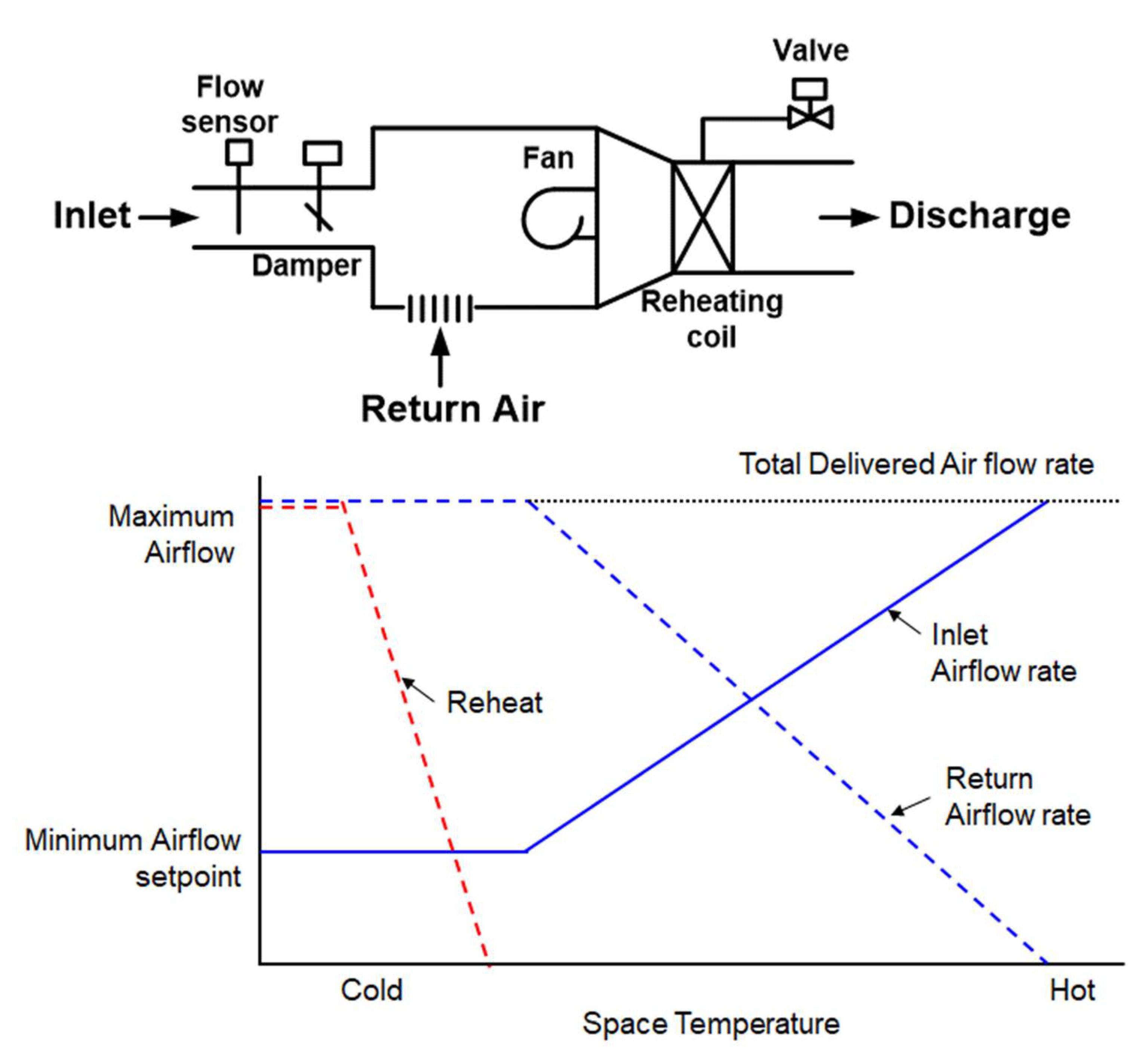
2.1. Throttling VAV Terminal Unit
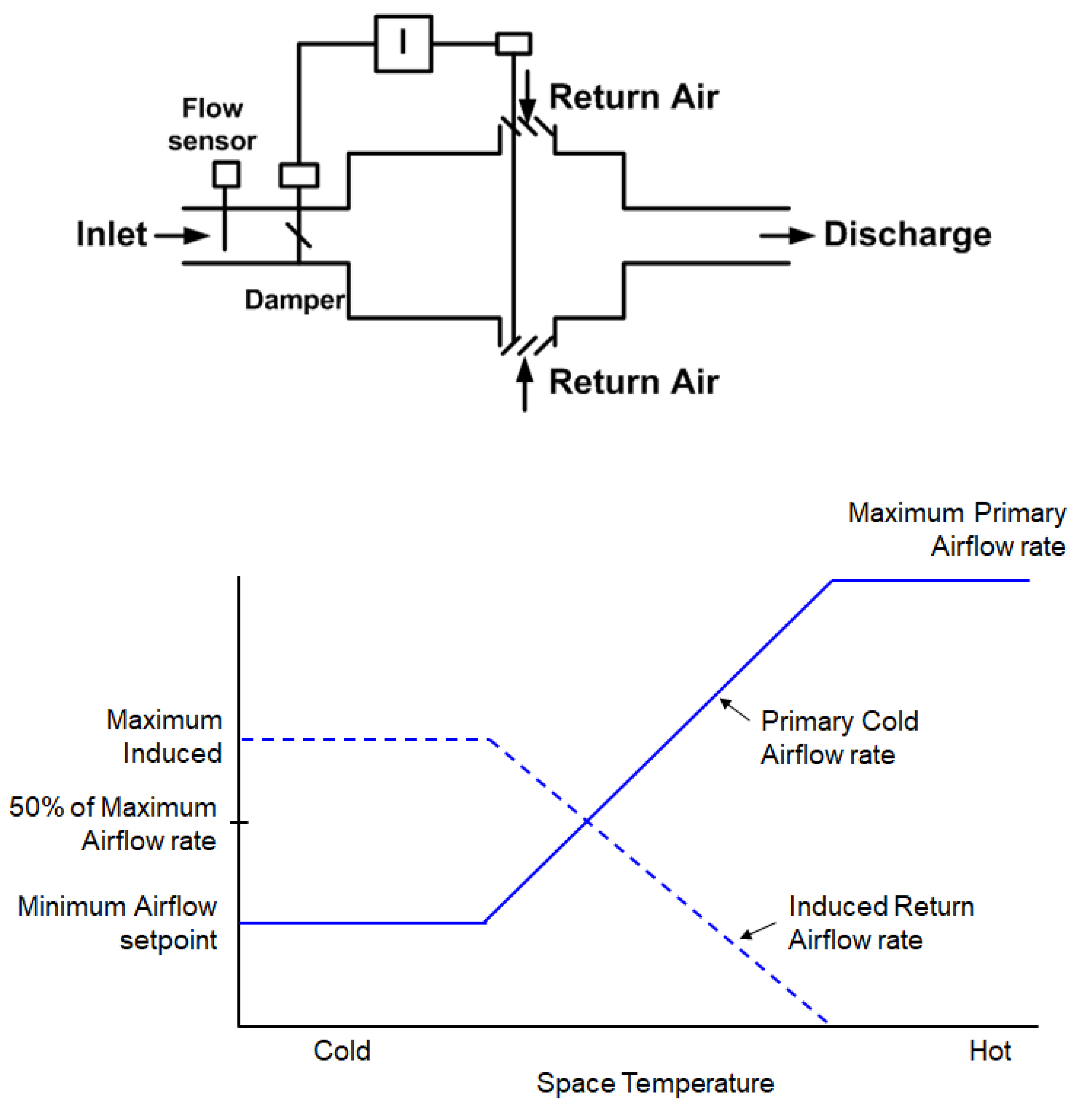
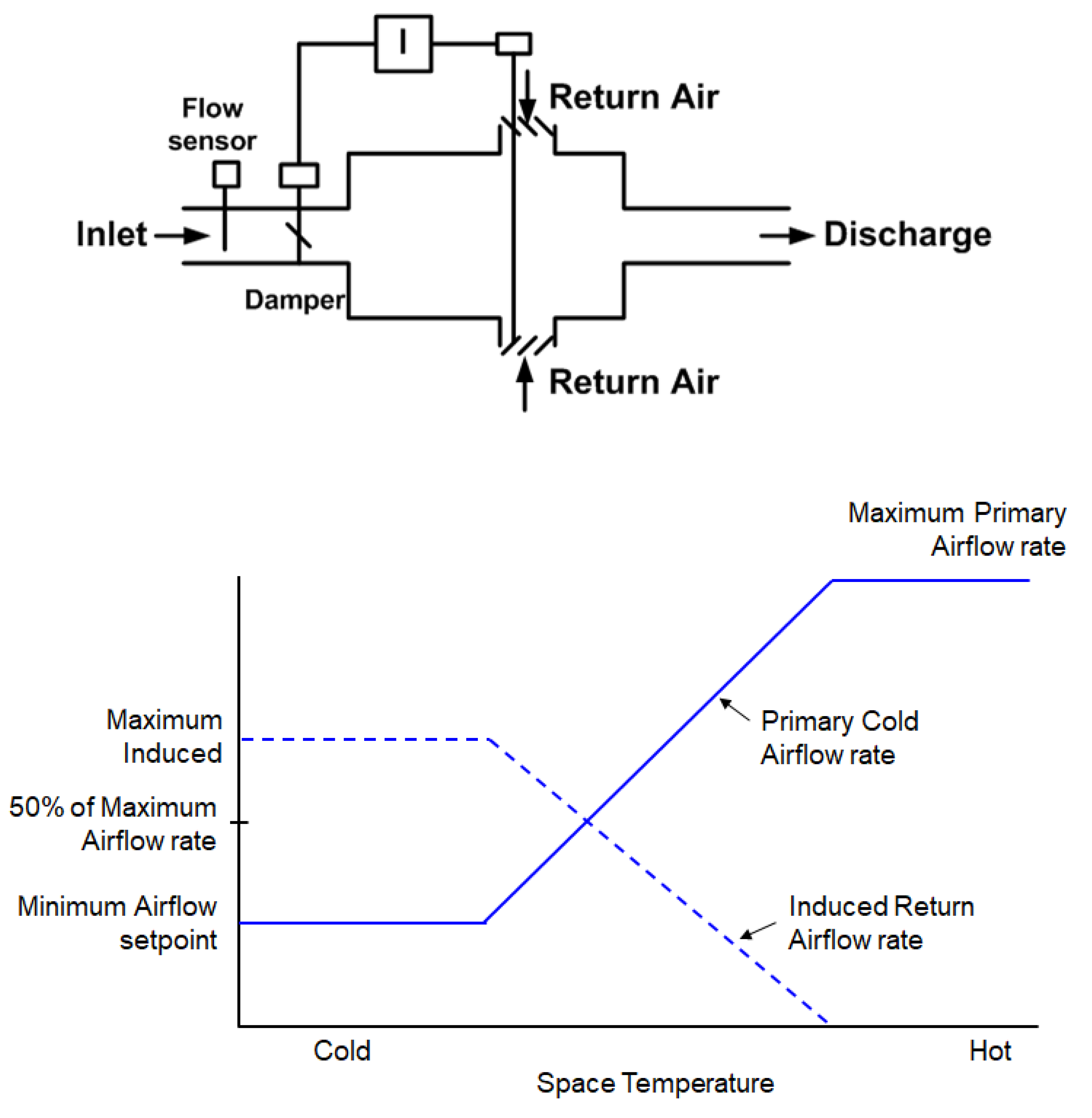
2.2. Induction VAV Terminal Unit
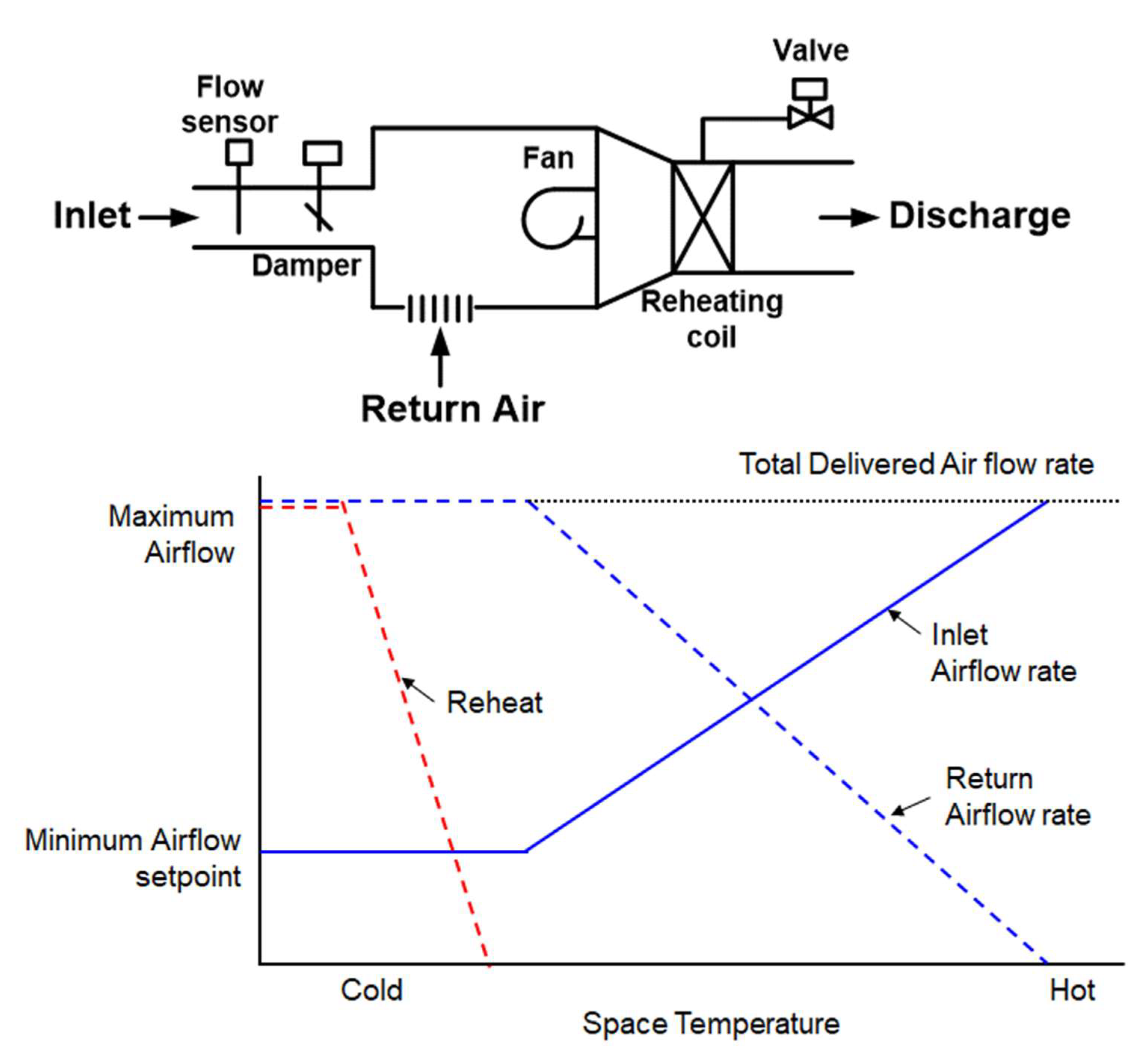
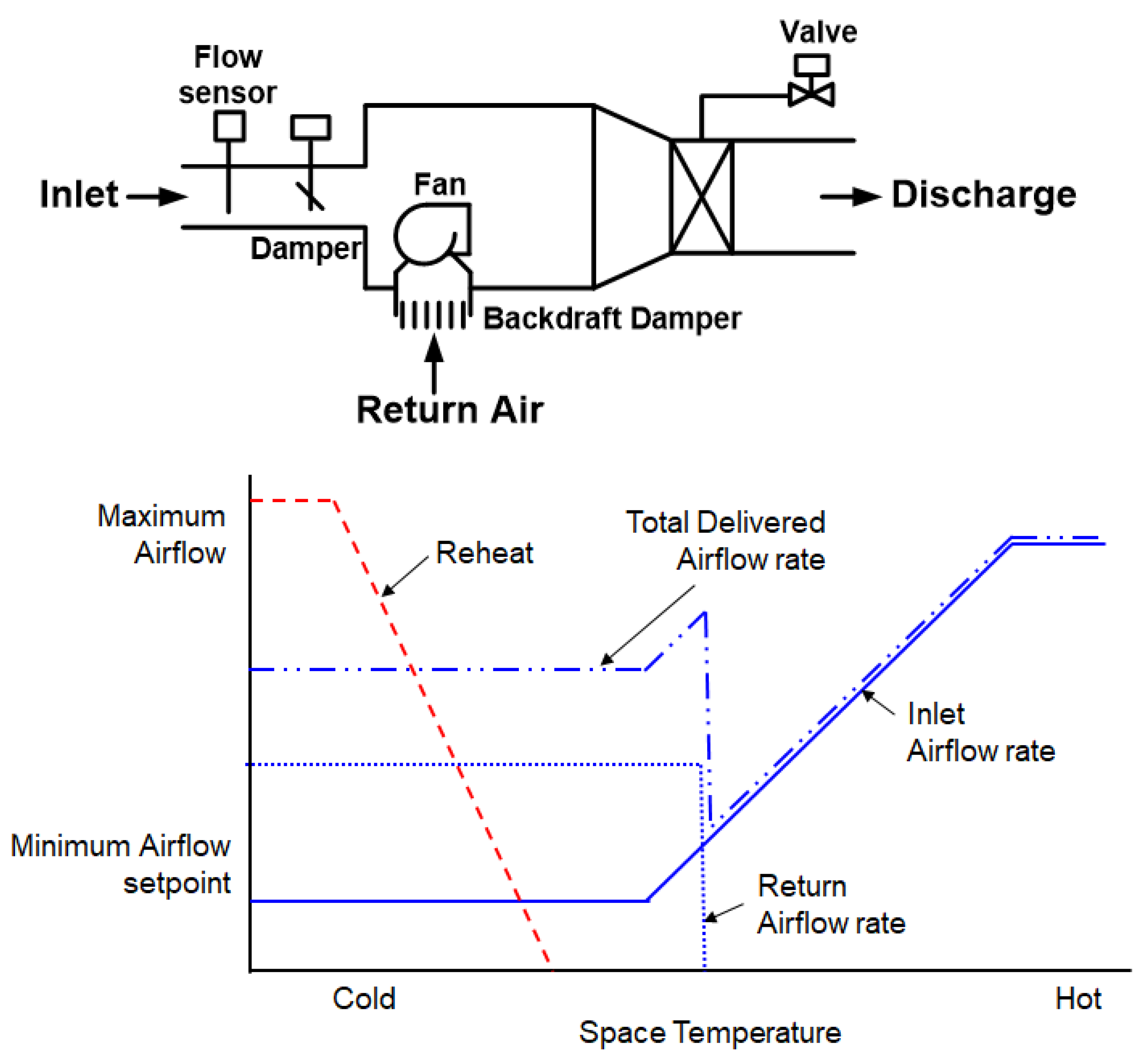
2.3. Fan-Powered VAV Terminal Unit
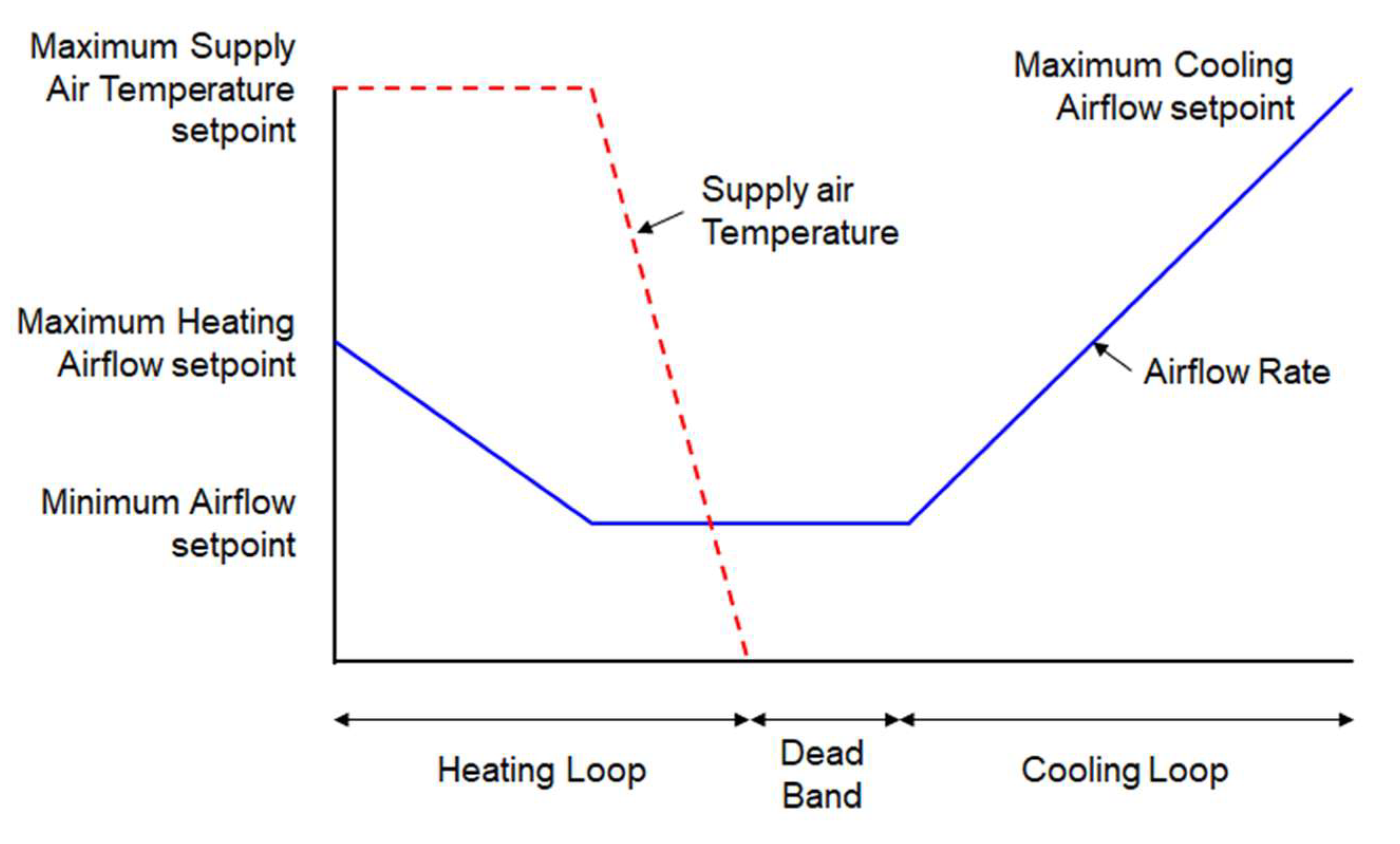
3. Operation and Control Method
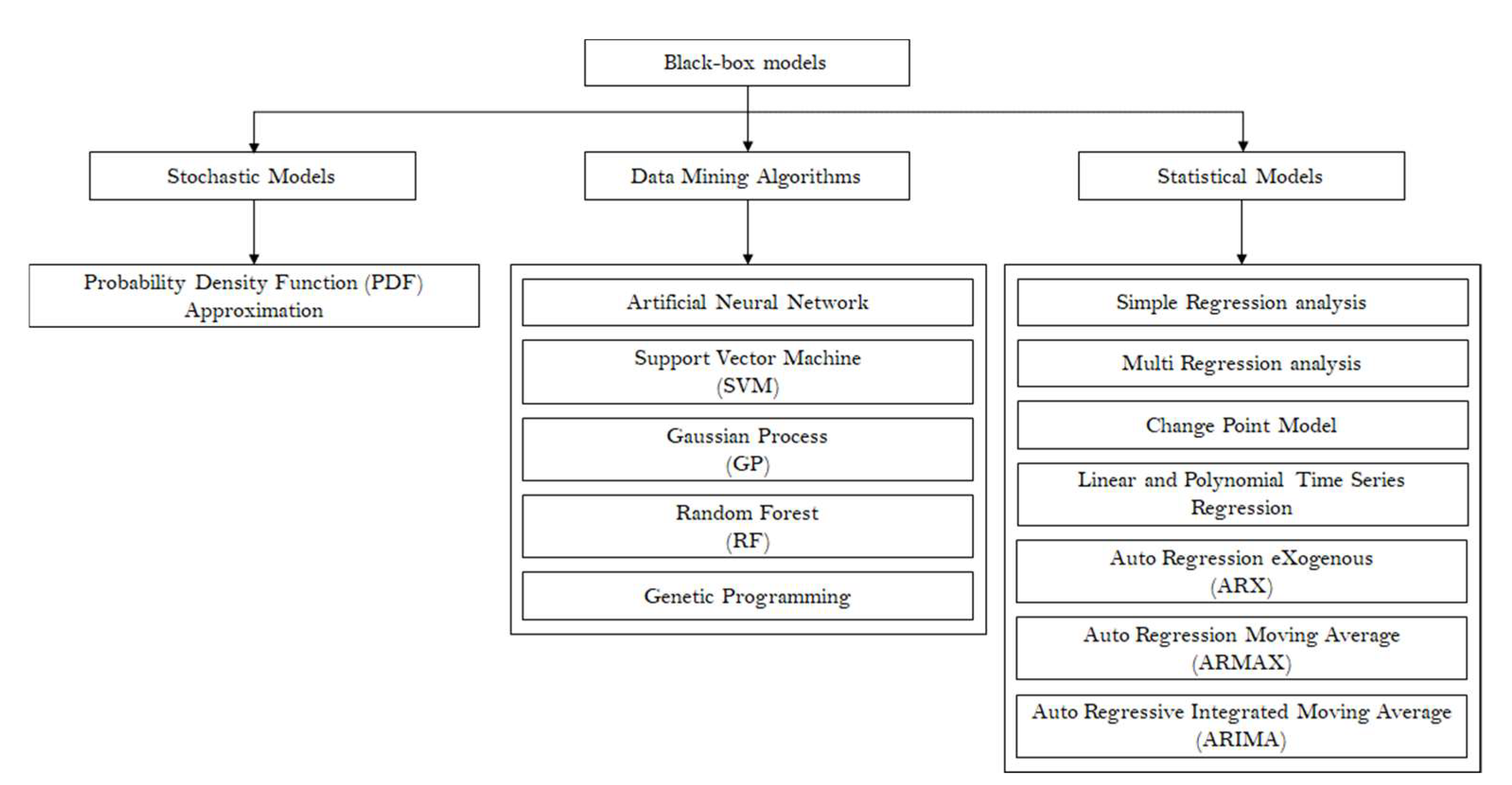
4. Prediction Model for VAV Terminal Unit Control
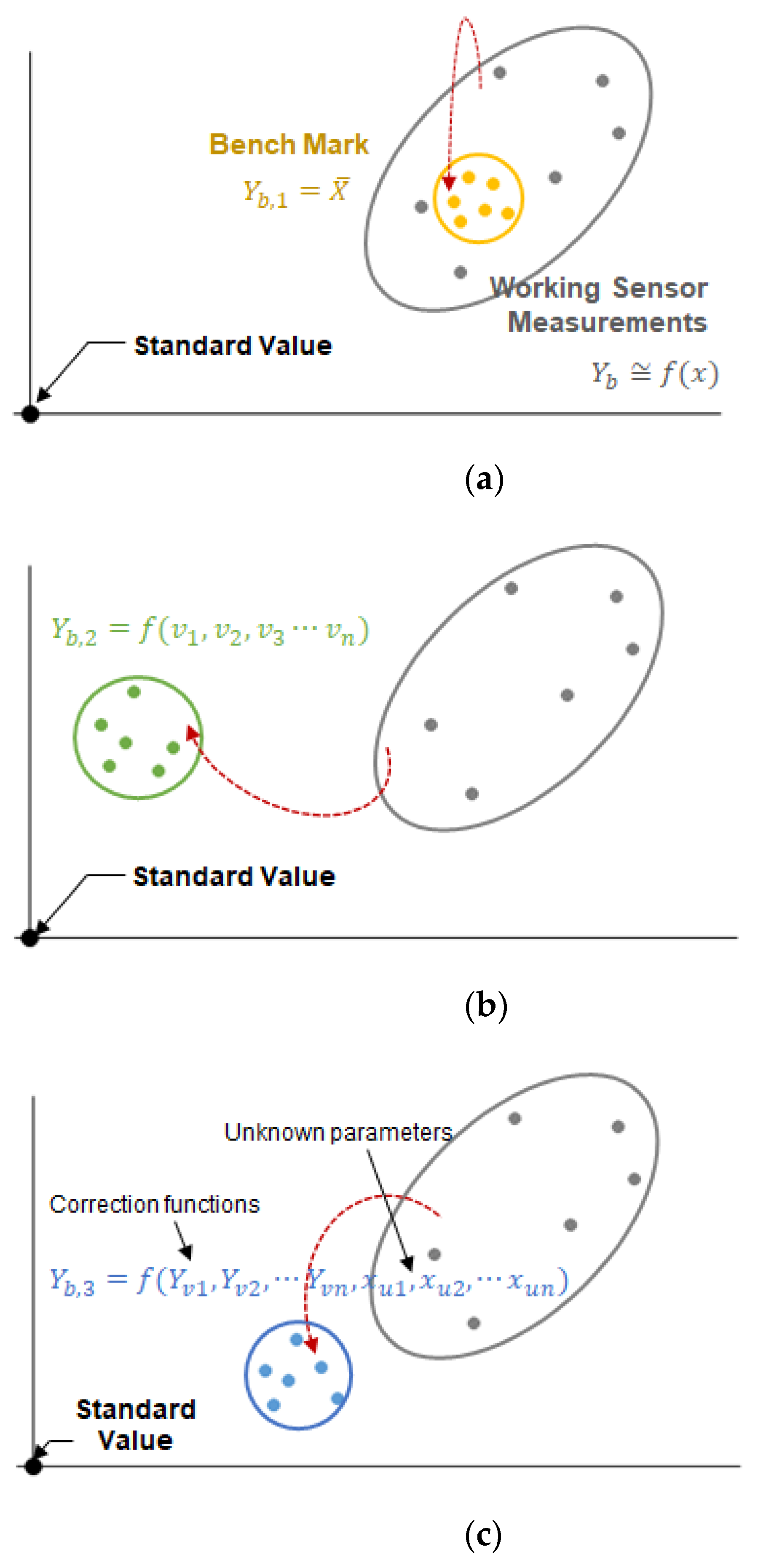
5. Sensor Calibration Method
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- United Nations. United Nations Framework Convention on Climate Change; UN: New York, NY, USA, 1992. [Google Scholar]
- United Nations. Adoption of the Paris Agreement; UN: New York, NY, USA, 2015. [Google Scholar]
- World Green Building Council. 2019 Global Status Report for Buildings and Construction; World Green Building Council: London, UK, 2019. [Google Scholar]
- Kim, D.; Cox, S.J.; Cho, H.; Im, P. Evaluation of energy savings potential of variable refrigerant flow (VRF) from variable air volume (VAV) in the U.S. climate locations. Energy Rep. 2017, 3, 85–93. [Google Scholar] [CrossRef]
- Rismanchi, B.; Zambrano, J.M.; Saxby, B.; Tuck, R.; Stenning, M. Control Strategies in Multi-Zone Air Conditioning Systems. Energies 2019, 12, 347. [Google Scholar] [CrossRef] [Green Version]
- Kim, C.-H.; Lee, S.-E.; Lee, K.-H.; Kim, K.-S. Detailed Comparison of the Operational Characteristics of Energy-Conserving HVAC Systems during the Cooling Season. Energies 2019, 12, 4160. [Google Scholar] [CrossRef] [Green Version]
- Awbi, H.B. Ventilation for Good Indoor Air Quality and Energy Efficiency. Energy Procedia 2017, 112, 277–286. [Google Scholar] [CrossRef]
- American Society of Heating, Refrigerating and Air-Conditioning Engineers (ASHRAE). ASHRAE Standard 90.1-2010: Energy Standard for Buildings Except Low-Rise Residential Buildings; ASHEAE: Atlanta, GA, USA, 2010. [Google Scholar]
- Seyedzadeh, S.; Rahimian, F.; Glesk, I.; Roper, M. Machine learning for estimation of building energy consumption and performance: A review. Vis. Eng. 2018, 6, 5. [Google Scholar] [CrossRef]
- Brambley, M.R.; Haves, P.; McDonald, S.C.; Torcellini, P.; Hansen, D.; Holmberg, D.R.; Roth, K.W. Advanced Sensors and Controls for Building Applications: Market Assessment and Potential R&D Pathways; PNNL-15149; Pacific Northwest National Laboratory: Washington, DC, USA, 2005.
- Rahmani, A.M.; Azhir, E.; Ali, S.; Mohammadi, M.; Ahmed, O.H.; Ghafour, M.Y.; Ahmed, S.H.; Hosseinzadeh, M. Artificial intelligence approaches and mechanisms for big data analytics: A systematic study. PeerJ Comput. Sci. 2021, 7, e488. [Google Scholar] [CrossRef]
- Lee, S.; Yik, F. A study on the energy penalty of various air-side system faults in buildings. Energy Build. 2010, 42, 2–10. [Google Scholar] [CrossRef]
- Kim, H.-J.; Kang, S.-H.; Cho, Y.-H. A Study on the Control Method without Stratification of Single Duct VAV Terminal Units. J. Asian Arch. Build. Eng. 2015, 14, 467–474. [Google Scholar] [CrossRef] [Green Version]
- Pang, X.; Piette, M.A.; Zhou, N. Characterizing variations in variable air volume system controls. Energy Build. 2017, 135, 166–175. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Dasu, A.R.; Zhang, J. Review of Literature on Terminal Box Control, Occupancy Sensing Technology and Multi-zone Demand Control Ventilation (DCV); PNNL-21281; Pacific Northwest National Laboratory: Washington, DC, USA, 2012.
- ASHRAE. ASHRAE Handbook HVAC Application, Design and Application of Controls; ASHRAE: Atlanta, GA, USA, 2015; Chapter 47. [Google Scholar]
- Int-Hout, D.; Faris, G. VAV terminal units: Looking Back, Ahead. ASHRAE J. 2015, 57, 40–49. [Google Scholar]
- Stein, J. VAV boxes, HPAC Heating, Piping, Air Conditioning Engineering. 2005, 77, 40–44.
- Cho, Y.; Liu, M.M. Minimum air flow reset of single duct VAV terminal boxes. Build. Environ. 2009, 44, 1876–1885. [Google Scholar] [CrossRef]
- Liu, G.; Brambley, M. Occupancy Based Control Strategy for Variable-Air-Volume (VAV) Terminal Box Systems. ASHRAE Trans. 2011, 117, 244–252. [Google Scholar]
- Kang, S.-H.; Kim, H.-J.; Cho, Y.-H. A study on the control method of single duct VAV terminal unit through the determination of proper minimum air flow. Energy Build. 2014, 69, 464–472. [Google Scholar] [CrossRef]
- Kim, H.-J.; Cho, Y.-H. A Study on a Control Method with a Ventilation Requirement of a VAV System in Multi-Zone. Sustainability 2017, 9, 2066. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Shi, T.; Jin, X.; Du, Z. Multi-sensor information fusion based control for VAV systems using thermal comfort constraints. Build. Simul. 2020, 14, 1047–1062. [Google Scholar] [CrossRef]
- Luskay, L.; Brambley, M.; Katipamula, S. Methods for Automated and Continuous Commissioning of Building Systems (Final Report); Air-Conditioning and Refrigeration Technology Institute: Arlington, VA, USA, 2003. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Wen, J. Review of building energy modeling for control and operation. Renew. Sustain. Energy Rev. 2014, 37, 517–537. [Google Scholar] [CrossRef]
- Serale, G.; Fiorentini, M.; Capozzoli, A.; Bernardini, D.; Bemporad, A. Model Predictive Control (MPC) for Enhancing Building and HVAC System Energy Efficiency: Problem Formulation, Applications and Opportunities. Energies 2018, 11, 631. [Google Scholar] [CrossRef] [Green Version]
- Thosar, A.; Patra, A.; Bhattacharyya, S. Feedback linearization based control of a variable air volume air conditioning system for cooling applications. ISA Trans. 2008, 47, 339–349. [Google Scholar] [CrossRef]
- Ma, Z.; Wang, S. An optimal control strategy for complex building central chilled water systems for practical and real-time applications. Build. Environ. 2009, 44, 1188–1198. [Google Scholar] [CrossRef]
- Solomatine, D.P.; Ostfeld, A. Data-driven modelling: Some past experiences and new approaches. J. Hydroinform. 2008, 10, 3–22. [Google Scholar] [CrossRef] [Green Version]
- Afram, A.; Janabi-Sharifi, F. Theory and applications of HVAC control systems—A review of model predictive control (MPC). Build. Environ. 2014, 72, 343–355. [Google Scholar] [CrossRef]
- Huang, H.; Chen, L.; Hu, E. A neural network-based multi-zone modelling approach for predictive control system design in commercial buildings. Energy Build. 2015, 97, 86–97. [Google Scholar] [CrossRef]
- Kim, Y.M.; Ahn, K.U.; Park, C.S. Issues of Application of Machine Learning Models for Virtual and Real-Life Buildings. Sustainability 2016, 8, 543. [Google Scholar] [CrossRef] [Green Version]
- Loyola-Gonzalez, O. Black-Box vs. White-Box: Understanding Their Advantages and Weaknesses from a Practical Point of View. IEEE Access 2019, 7, 154096–154113. [Google Scholar] [CrossRef]
- Garnier, A.; Eynard, J.; Caussanel, M.; Grieu, S. Predictive control of multizone heating, ventilation and air-conditioning systems in non-residential buildings. Appl. Soft Comput. 2015, 37, 847–862. [Google Scholar] [CrossRef]
- Platon, R.; Dehkordi, V.R.; Martel, J. Hourly Prediction of a Building’s Electricity Consumption using Case-based Reasoning, Artificial Neural Networks and Principal Component Analysis. Energy Build. 2015, 92, 10–18. [Google Scholar] [CrossRef]
- González, P.A.; Zamarreño, J. Prediction of hourly energy consumption in buildings based on a feedback artificial neural network. Energy Build. 2005, 37, 595–601. [Google Scholar] [CrossRef]
- Ansari, F.A.; Mokhtar, A.S.; Abbas, K.A.; Adam, N.M. A Simple Approach for Building Cooling Load Estimation. Am. J. Environ. Sci. 2005, 1, 209–212. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Q.; Wang, S.; Xu, X.; Xiao, F. A grey-box model of next-day building thermal load prediction for energy-efficient control. Int. J. Energy Res. 2008, 32, 1418–1431. [Google Scholar] [CrossRef]
- Li, Q.; Meng, Q.; Cai, J.; Yoshino, H.; Mochida, A. Applying support vector machine to predict hourly cooling load in the building. Appl. Energy 2009, 86, 2249–2256. [Google Scholar] [CrossRef]
- Kwok, S.S.; Lee, W.E. A study of the importance of occupancy to building cooling load in prediction by intelligent approach. Energy Convers. Manag. 2011, 52, 2555–2564. [Google Scholar] [CrossRef]
- Edwards, R.E.; New, J.; Parker, L.E. Predicting future hourly residential electrical consumption: A machine learning case study. Energy Build. 2012, 49, 591–603. [Google Scholar] [CrossRef]
- Sholahudin, S.; Han, H. Simplified dynamic neural network model to predict heating load of a building using Taguchi method. Energy 2016, 115, 1672–1678. [Google Scholar] [CrossRef]
- Sala-Cardoso, E.; Delgado-Prieto, M.; Kampouropoulos, K.; Romeral, L. Activity-aware HVAC power demand forecasting. Energy Build. 2018, 170, 15–24. [Google Scholar] [CrossRef]
- Ahmad, M.W.; Mourshed, M.; Rezgui, Y. Trees vs Neurons: Comparison between random forest and ANN for high-resolution prediction of building energy consumption. Energy Build. 2017, 147, 77–89. [Google Scholar] [CrossRef]
- Yoon, S.; Yu, Y.; Wang, J.; Wang, P. Impacts of HVACR temperature sensor offsets on building energy performance and occupant thermal comfort. Build. Simul. 2018, 12, 259–271. [Google Scholar] [CrossRef]
- Zhang, R.; Hong, T. Modeling of HVAC operational faults in building performance simulation. Appl. Energy 2017, 202, 178–188. [Google Scholar] [CrossRef]
- Verhelst, J.; Van Ham, G.; Saelens, D.; Helsen, L. Economic impact of persistent sensor and actuator faults in concrete core activated office buildings. Energy Build. 2017, 142, 111–127. [Google Scholar] [CrossRef]
- Roth, K.W.; Westphalen, D.; Llana, P.; Feng, M. The energy impact of faults in U.S. commercial buildings. In Proceedings of the International Refrigeration and Air Conditioning Conference, Milan, Italy, 12–13 June 2009. [Google Scholar]
- Yu, Y.; Li, H. Virtual in-situ calibration method in building systems. Autom. Constr. 2015, 59, 59–67. [Google Scholar] [CrossRef] [Green Version]
- Yoon, S.; Yu, Y. Extended virtual in-situ calibration method in building systems using Bayesian inference. Autom. Constr. 2017, 73, 20–30. [Google Scholar] [CrossRef] [Green Version]
- Badura, M.; Batog, P.; Drzeniecka-Osiadacz, A.; Modzel, P. Regression methods in the calibration of low-cost sensors for ambient particulate matter measurements. SN Appl. Sci. 2019, 1, 622. [Google Scholar] [CrossRef] [Green Version]
- Ruiter, S.; Kuijpers, E.; Saunders, J.; Snawder, J.; Warren, N.; Gorce, J.-P.; Blom, M.; Krone, T.; Bard, D.; Pronk, A.; et al. Exploring Evaluation Variables for Low-Cost Particulate Matter Monitors to Assess Occupational Exposure. Int. J. Environ. Res. Public Health 2020, 17, 8602. [Google Scholar] [CrossRef] [PubMed]
- Yoon, S.; Yu, Y. Hidden factors and handling strategy for accuracy of virtual in-situ sensor calibration in building energy systems: Sensitivity effect and reviving calibration. Energy Build. 2018, 170, 217–228. [Google Scholar] [CrossRef]
- Yoon, S.; Yu, Y. Hidden factors and handling strategies on virtual in-situ sensor calibration in building energy systems: Prior information and cancellation effect. Appl. Energy 2018, 212, 1069–1082. [Google Scholar] [CrossRef]
- Yoon, S.; Yu, Y. Strategies for virtual in-situ sensor calibration in building energy systems. Energy Build. 2018, 172, 22–34. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Year | Contents | Cons |
|---|---|---|---|
| Stein [18] | 2005 |
|
|
| Cho and Liu [19] | 2009 |
|
|
| Liu and Brambley [20] | 2011 |
|
|
| Kang et al. [21] | 2014 |
|
|
| Kim et al. [22] | 2017 |
|
|
| Zhu et al. [23] | 2021 |
|
|
| Category | Method | Prediction | Input | Author | |
|---|---|---|---|---|---|
| Indoor Load | White-box | Cooling load | Total 4 point (Indoor temperature, etc.) | F.A. Ansari et al. [37] | |
| Grey-box | Heating/Cooling load | Total 9 point (Relative humidity, etc.) | Zhou et al. [38] | ||
| Black -box | Support vector machine | Cooling load | Total 5 point (solar radiation, etc.) | Li et al. [39] | |
| Probabilistic Entropy-Based Neural | Cooling load | Total 4 point (Building form factor, etc.) | Simon S.K. et al. [40] | ||
| Support Vector Machine | Heating load | Total 8 point (Residential data, etc.) | Edwards R.E. et al. [41] | ||
| Artificial Neural Network | Heating load | Total 5 point (Wind speed, etc.) | Sholahudin S. et al. [42] | ||
| Recurrent Neural Networks | Heating/Cooling load | Total 7 point (Occupancy, etc.) | Sala-Cardoso E. et al. [43] | ||
| Random Forest | Heating/Cooling load | Total 6 point (Humidity, etc.) | Ahmad M.W. et al. [44] | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.-J.; Cho, Y.-H. Optimal Control Method of Variable Air Volume Terminal Unit System. Energies 2021, 14, 7527. https://doi.org/10.3390/en14227527
Kim H-J, Cho Y-H. Optimal Control Method of Variable Air Volume Terminal Unit System. Energies. 2021; 14(22):7527. https://doi.org/10.3390/en14227527
Chicago/Turabian StyleKim, Hyo-Jun, and Young-Hum Cho. 2021. "Optimal Control Method of Variable Air Volume Terminal Unit System" Energies 14, no. 22: 7527. https://doi.org/10.3390/en14227527
APA StyleKim, H.-J., & Cho, Y.-H. (2021). Optimal Control Method of Variable Air Volume Terminal Unit System. Energies, 14(22), 7527. https://doi.org/10.3390/en14227527