
Application of Empirical Mode Decomposition and Extreme Learning Machine Algorithms on Prediction of the Surface Vibration Signal


Abstract
1. Introduction
2. Definition of Surface Vibration Signal
3. The Proposed Prediction Algorithms of Surface Vibration Signal Based on EMD-ELM
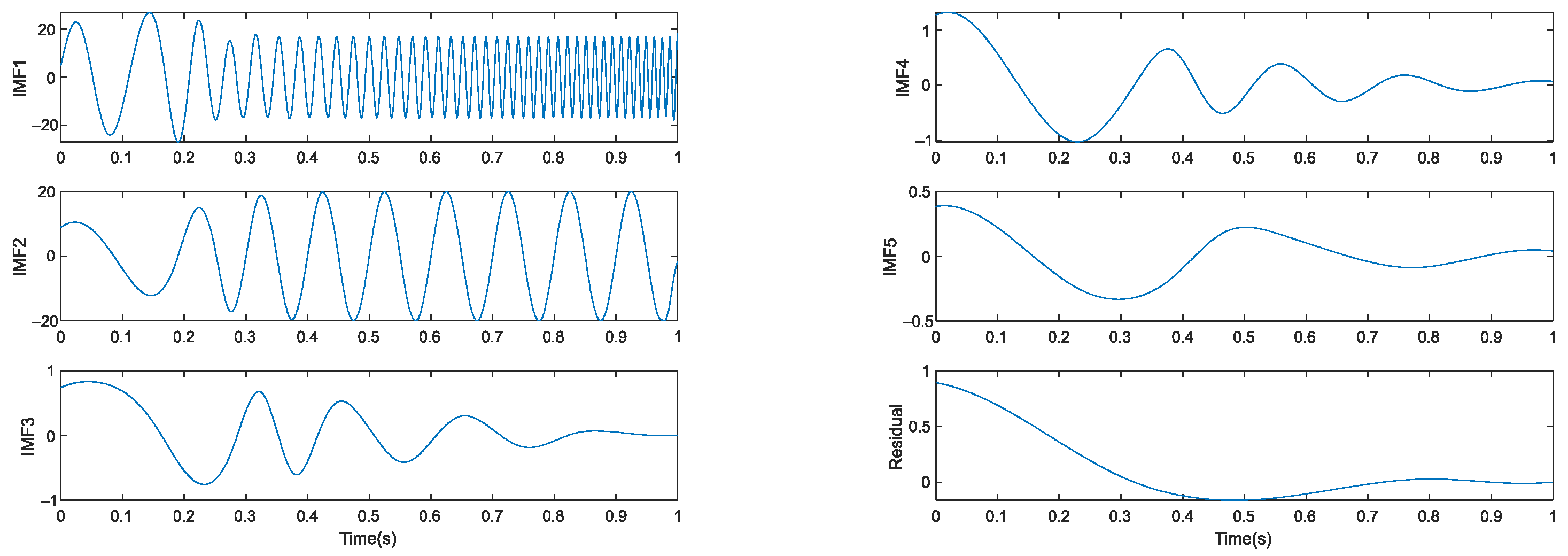
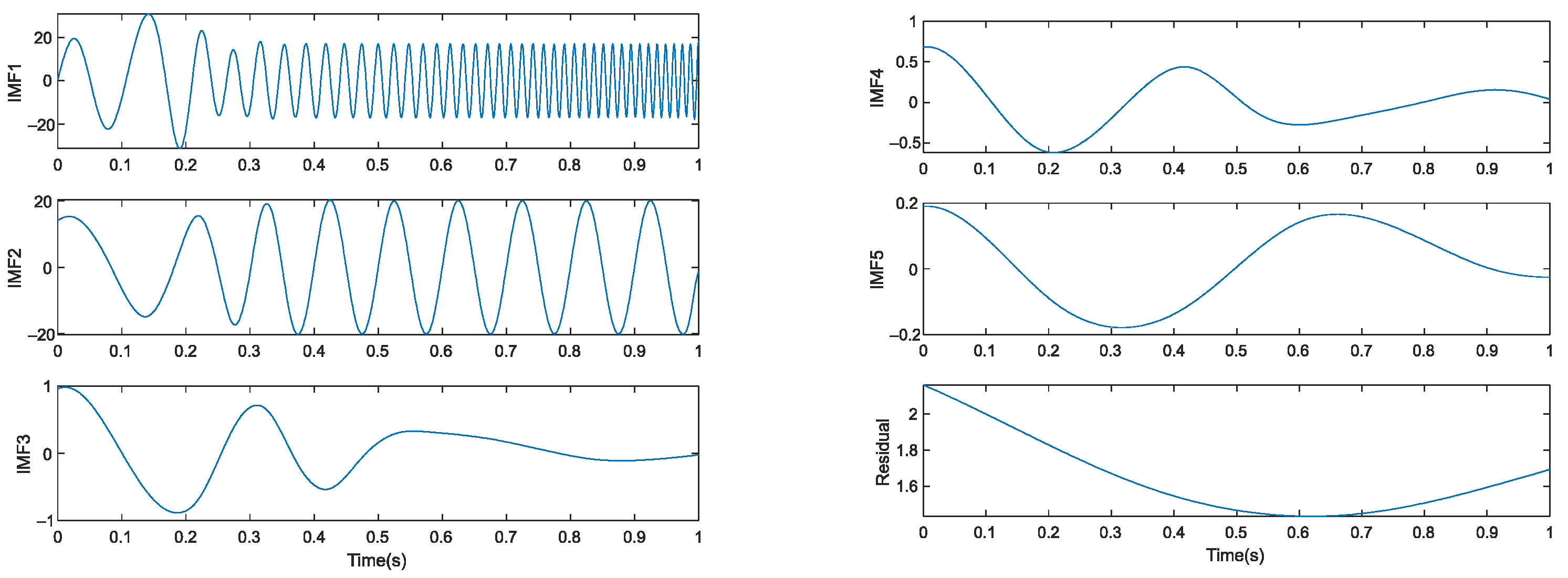
3.1. Empirical Mode Decomposition
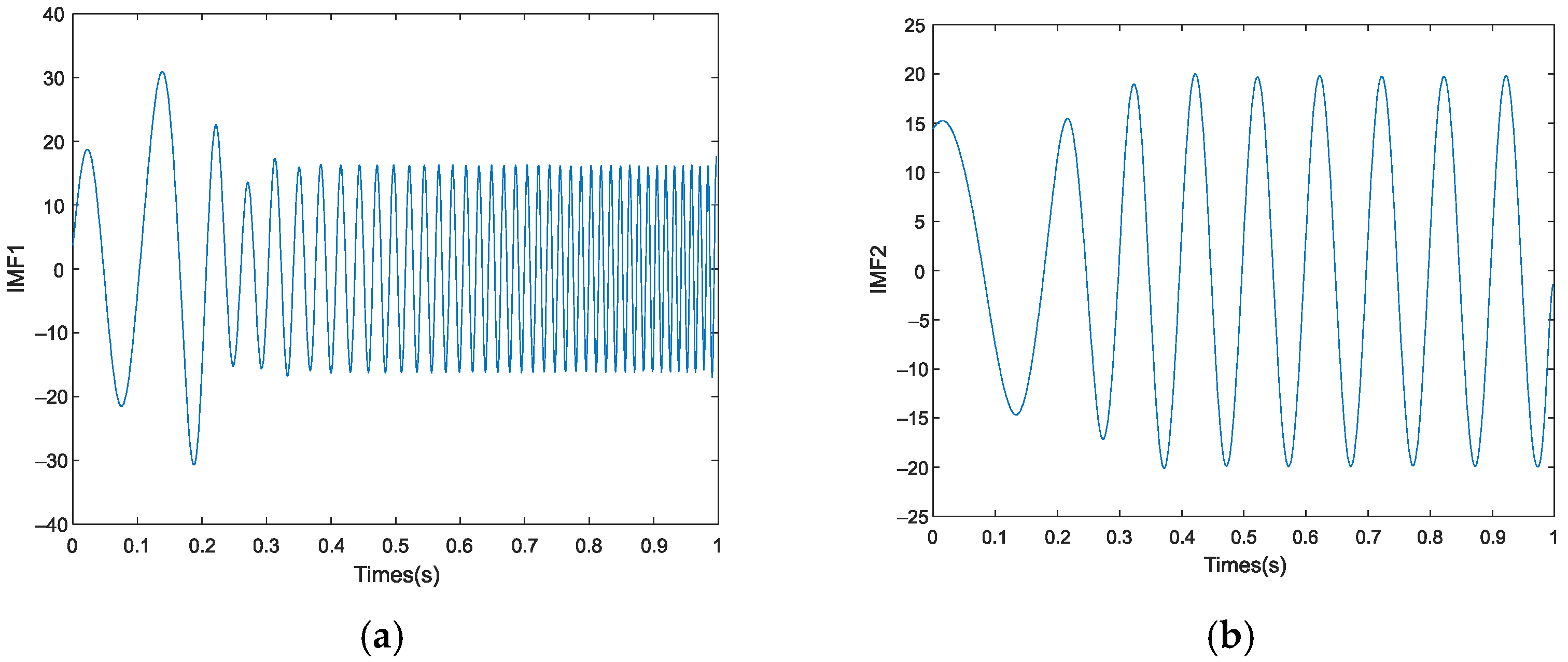
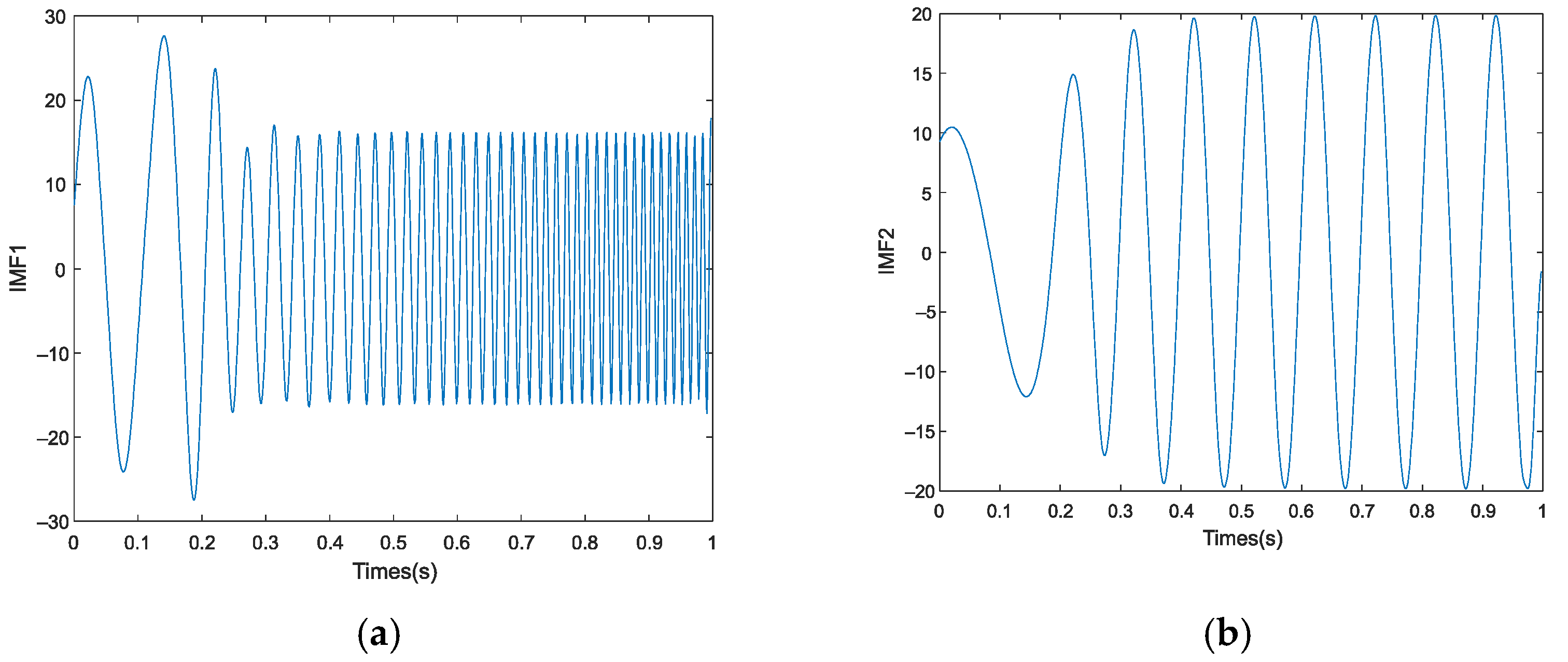
3.2. Improved Empirical Mode Decomposition
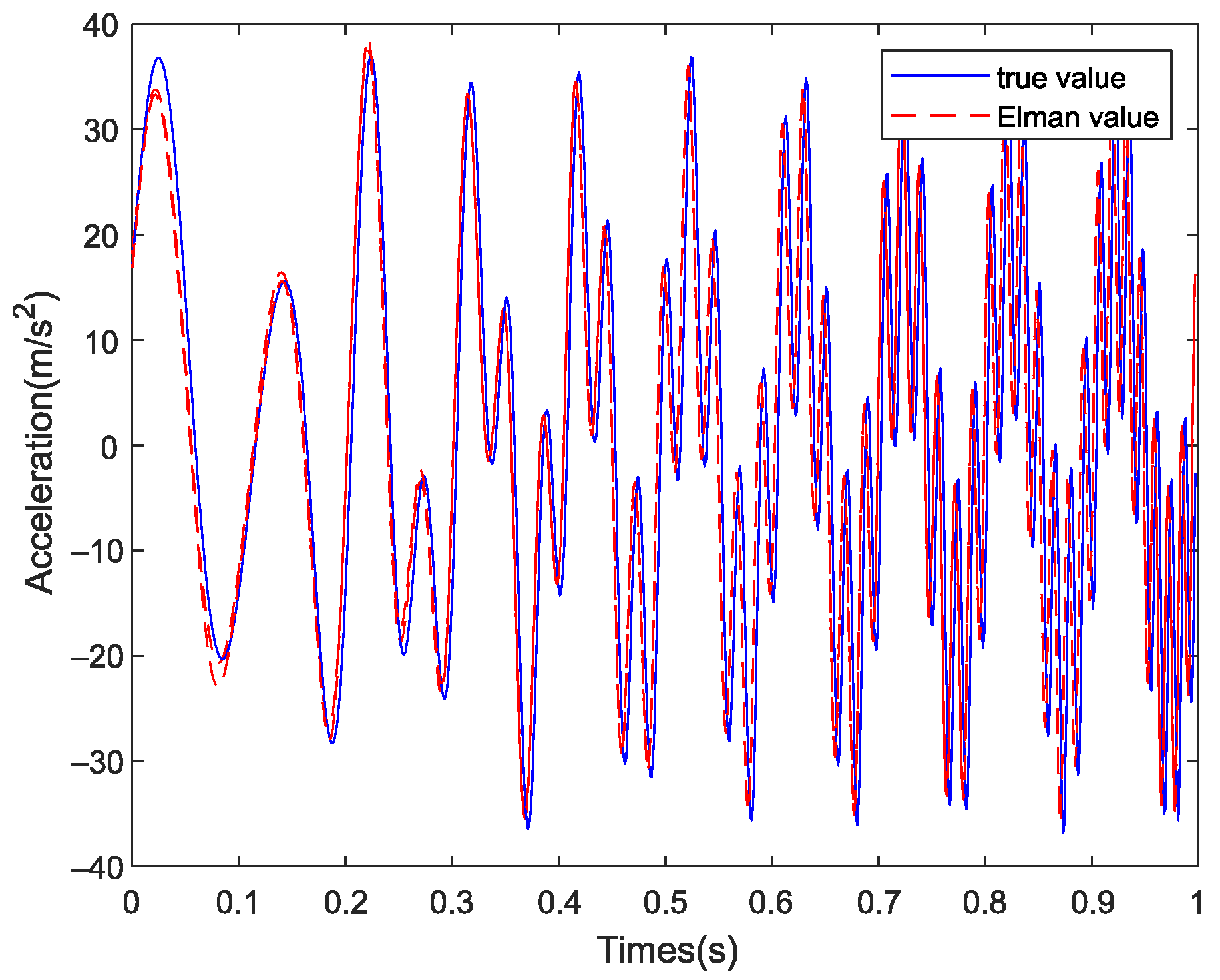
3.3. Extreme Learning Machine
4. The Simulation Results
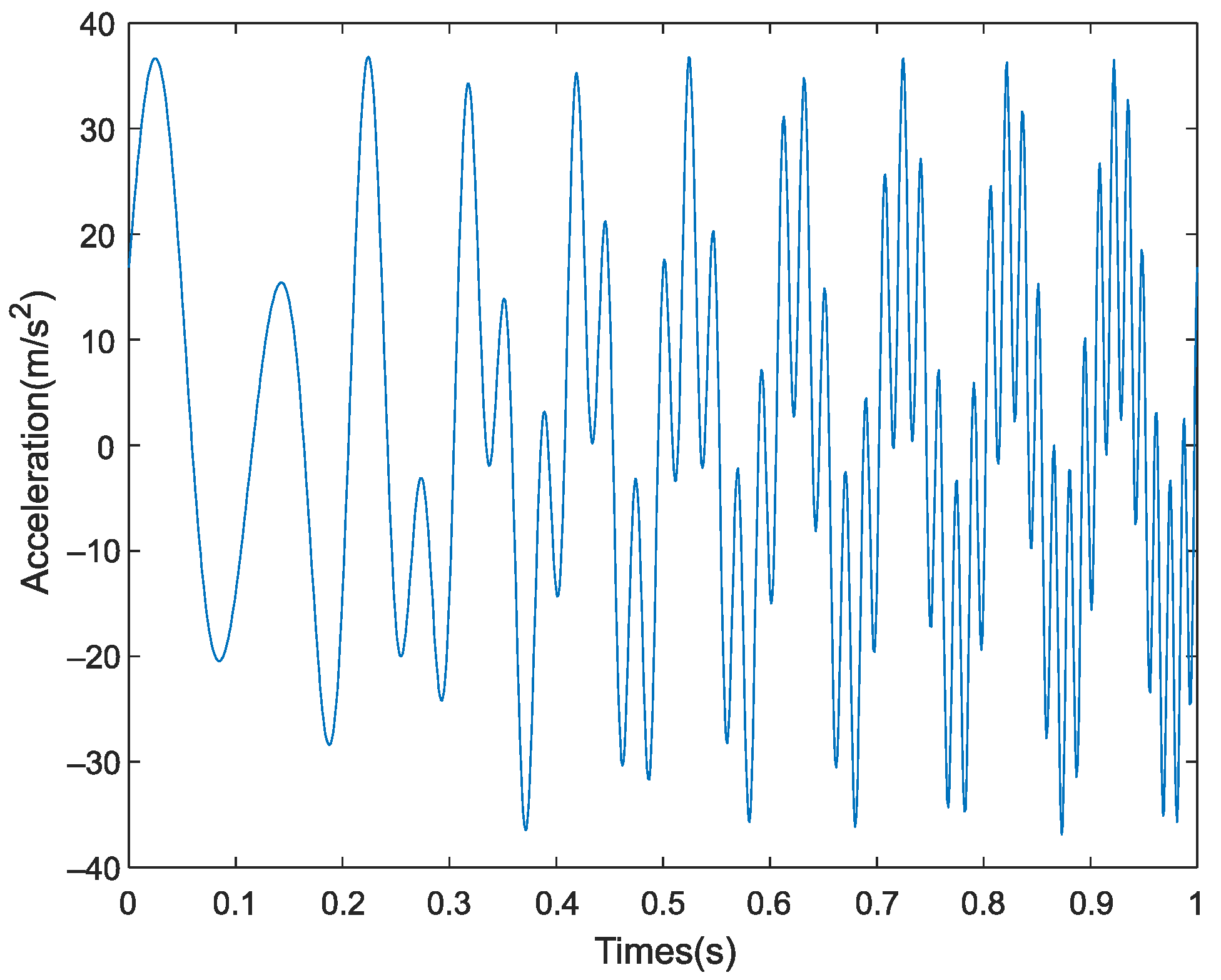
4.1. Surface Vibration Signal without Noise
4.2. Surface Vibration Signal with Noise
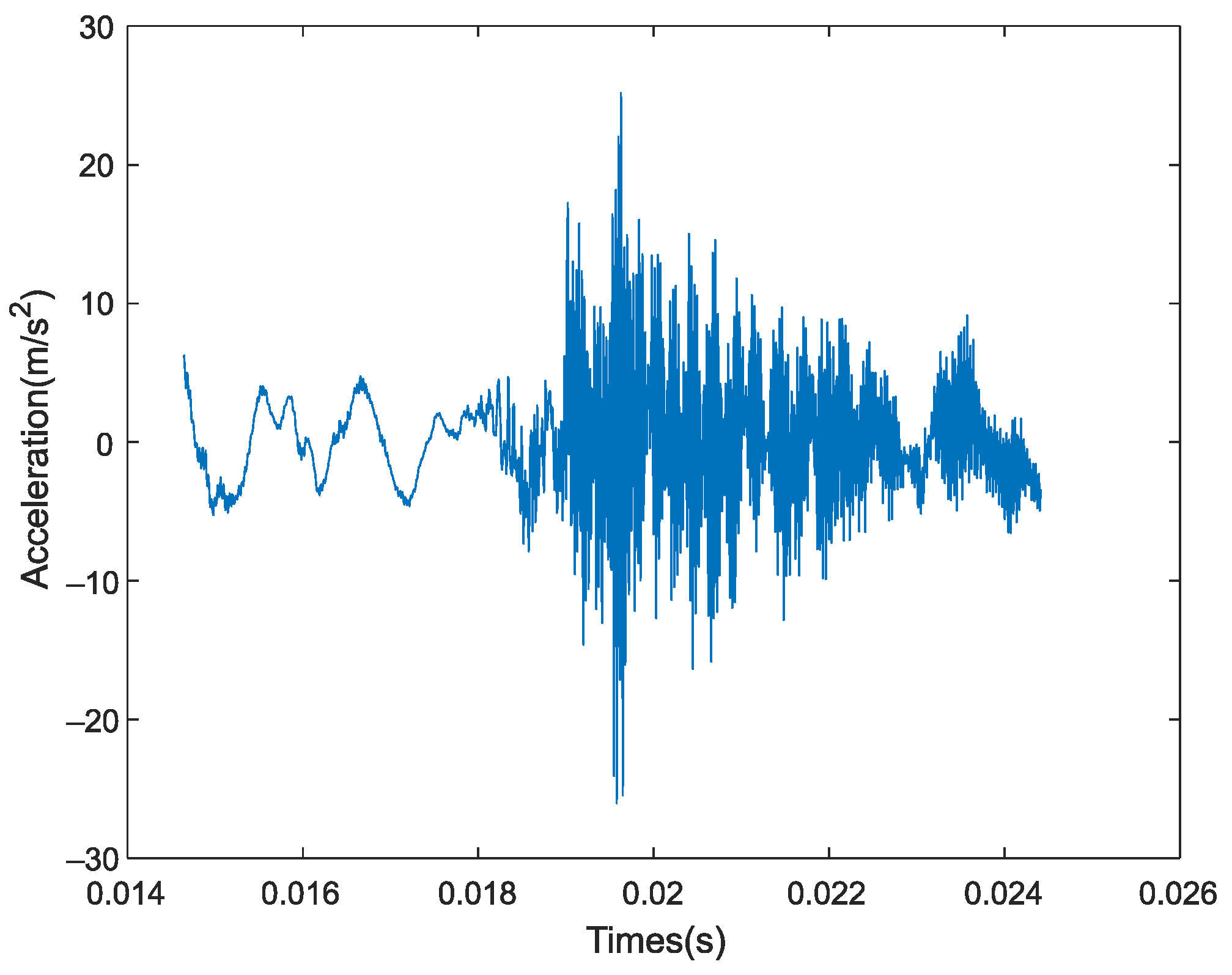
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shen, Z.X.; Huang, X.Y.; Ma, X.X. Diesel engine fault diagnosis based on EMD and support vector machine. J. Vib. Meas. Diagn. 2010, 30. Available online: http://en.cnki.com.cn/Article_en/CJFDTotal-ZDCS201001006.htm (accessed on 24 September 2021).
- Du, X.F.; Shu, G.Q.; Wei, H.Q.; Cao, X.-F. Influence law of diesel engine vibration source based on IMF sensitivity analysis. J. Tianjin Univ. Nat. Sci. Eng. 2015, 48, 1098–1104. [Google Scholar]
- Wang, X.; Yue, Y.J.; Cai, Y.P. Fast Sparse Decomposition and Two-dimensional Feature Coding of Diesel Engine Vibration Signal Vibration. Chin. J. Test. Diagn. 2019, 39, 114–122, 225. [Google Scholar]
- Xiao, B.; Shi, L.; Cao, Y.P. Source analysis of diesel engine based on adaptive generalized linear hybrid model. J. Harbin Eng. Univ. 2019, 40, 2029–2035. [Google Scholar]
- Chen, D.; Wu, J.; Wang, L.; Liang, J.; Gong, X.; Kong, W. A method for predicting spindle rotation accuracy using vibration. Sci. Sin. Technol. 2020, 50, 819–828. [Google Scholar] [CrossRef]
- Pang, C.S.; Liu, L.; Shan, T. Time-frequency analysis method based on short-time fractional Fourier transform. Acta Electron. Sin. 2014, 42, 347–352. [Google Scholar]
- Shirkov, D.V. Fourier Transformation of the Renormalization-Invariant Coupling. Theor. Math. Phys. 2003, 136, 893–907. [Google Scholar] [CrossRef]
- Li, H.; Zhang, Q.; Qin, X.R. Bearing fault diagnosis method based on STFT and convolutional neural network. J. Vib. Shock. 2018, 37, 124–131. [Google Scholar]
- Xu, Y.G.; Meng, Z.P.; Zhao, G.L. Study on compound fault diagnosis of rolling bearing based on dual-tree complex wavelet transform. Chin. J. Sci. Instrum. 2014, 35, 447–452. [Google Scholar]
- Chen, R.X.; Huang, X.; Yang, L.X. Rolling bearing fault diagnosis based on convolutional neural network and discrete wavelet transform. J. Vib. Eng. 2018, 31, 883–891. [Google Scholar]
- Wu, Z.; Huang, N.E. A study of the characteristics of white noise using the empirical mode decomposition method. Proc. R. Soc. A Math. Phys. Eng. Sci. 2004, 460, 1597–1611. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Huang, N.E. Introduction to the Hilbert-Huang Transform and its Related Mathematical Problems. In Hilbert-Huang Transform and Its Applications; Huang, N.E., Shen, S.S.P., Eds.; World Scientific: Singapore, 2005. [Google Scholar]
- Xiao, Y.; Yin, F.L. De-correlation EMD: A new method of eliminating mode mixing. J. Vib. Shock. 2015, 34, 25–29. [Google Scholar]
- Hu, A.J.; Sun, J.J.; Xiang, L. Modal Aliasing problem in Empirical Mode Decomposition. Vib. Chin. J. Meas. Diagn. 2011, 31, 429–434, 532–533. [Google Scholar]
- Bai, C.H.; Zhou, X.C.; Lin, D.C. Research on PSO-SVM method for eliminating EMD endpoint effect. Syst. Eng. Theory Pract. 2013, 33, 1298–1306. [Google Scholar]
- He, Z.P.; Zhu, Z.Q.; Xie, H.C.; Wang, Y.; Li, Z.; He, R.; Du, C.; Li, J. Restrain Boundary Effect of EMD Based on Least Square Fitting. J. Syst. Simul. 2018, 30, 3377. [Google Scholar]
- Hu, L.P.; Song, E.L.; Li, B.Q. A fast EMD algorithm for stream data analysis. J. Vib. Shock. 2012, 31, 116–120. [Google Scholar]
- Li, X.Y.; Zou, X.J.; Zhang, R.B.; Qian, Z. Research on empirical mode decomposition based on spectrum entropy methods and principal component analysis. J. Harbin Eng. Univ. 2009, 30, 797–803. [Google Scholar]
- Tang, B.; Dong, S.; Song, T. Method for eliminating mode mixing of empirical mode decomposition based on the revised blind source separation. Signal Process. 2012, 92, 248–258. [Google Scholar] [CrossRef]
- Kurbatskii, V.G.E.; Sidorov, D.N.; Spiryaev, V.A.; Tomin, N.V. On the neural network approach for forecasting of nonstationary time series on the basis of the Hilbert–Huang transform. Autom. Remote Control 2011, 72, 1405–1414. [Google Scholar] [CrossRef]
- Hu, X.Y.; Peng, S.L.; Tan, J. Back projection strategy for solving mode mixing problem. Int. J. Wavelets Multiresolut. Inf. Process. 2012, 10, 1250031. [Google Scholar] [CrossRef]
- Hu, N.Q.; Chen, H.P.; Cheng, Z.; Zhang, L. Fault Diagnosis Method of Planetary Gearbox Based on Empirical Mode Decomposition and Deep Convolutional Neural Network. Chin. J. Mech. Eng. 2019, 55, 9–18. [Google Scholar] [CrossRef]
- Kurbatskii, V.G.; Sidorov, D.N.; Spiryaev, V.A.; Tomin, N.V. Tomin Forecasting nonstationary time series based on Hilbert–Huang transform and machine learning. Autom. Remote Control 2014, 75, 922–934. [Google Scholar] [CrossRef]
- Xu, K.; Chen, Z.H.; Zhang, C.B. Rolling bearing fault diagnosis based on empirical mode decomposition and support vector machine. Control Theory Appl. 2019, 36, 915–922. [Google Scholar]
- Leung, T.; Zhao, T. Financial Time Series Analysis and Forecasting with HHT Feature Generation and Machine Learning. Appl. Stoch. Models Bus. Ind. 2021. [CrossRef]
- Mishra, M.; Panigrahi, R.R. Advanced signal processing and machine learning techniques for voltage sag causes detection in an electric power system. Int. Trans. Electr. Energy Syst. 2020, 30, e12167. [Google Scholar] [CrossRef]
- Parkavi, R.M.; Shanthi, M.; Bhuvaneshwari, M.C. Recent trends in ELM and MLELM: A review. Adv. Sci. Technol. Eng. Syst. J. 2017, 2, 69–75. [Google Scholar] [CrossRef][Green Version]
- Xu, R.; Liang, X.; Qi, J.S. Advances and trends of extreme learning machine. Chin. J. Comput. Mach. 2019, 42, 1640–1670. [Google Scholar]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: Theory and applications. Neurocomputing 2006, 70, 489–501. [Google Scholar] [CrossRef]
- Ding, S. Extreme learning machine: Algorithm, theory and applications. Artif. Intell. Rev. 2015, 44, 103–115. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, X. Theory and Numerical Analysis of Extreme Learning Machine and Its Application for Different Degrees of Defect Recognition of Hoisting Wire Rope. Shock Vib. 2018, 2018, 4168209. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 |
|---|---|---|---|---|---|
| Coefficient | 0.70 | 0.68 | 0.14 | 0.13 | 0.09 |
| Mode | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 |
|---|---|---|---|---|---|
| Coefficient | 0.73 | 0.69 | 0.16 | 0.13 | 0.11 |
| Mode | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 |
|---|---|---|---|---|---|
| Coefficient | 0.70 | 0.69 | 0.14 | 0.13 | 0.09 |
| Mode | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 |
|---|---|---|---|---|---|
| Coefficient | 0.73 | 0.69 | 0.16 | 0.14 | 0.11 |
| Method | Orthogonality Index |
|---|---|
| EMD | 0.2437 |
| IEMD | 0.0660 |
| Method | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | IMF7 |
|---|---|---|---|---|---|---|---|
| EMD | 0.90 | 0.10 | 0.20 | 0.19 | 0.04 | −0.01 | −0.02 |
| IEMD | 0.91 | 0.21 | 0.26 | 0.18 | 0.08 | 0.04 | 0.06 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, Y.; Wang, P.; Wang, X.; Sun, K. Application of Empirical Mode Decomposition and Extreme Learning Machine Algorithms on Prediction of the Surface Vibration Signal. Energies 2021, 14, 7519. https://doi.org/10.3390/en14227519
Shen Y, Wang P, Wang X, Sun K. Application of Empirical Mode Decomposition and Extreme Learning Machine Algorithms on Prediction of the Surface Vibration Signal. Energies. 2021; 14(22):7519. https://doi.org/10.3390/en14227519
Chicago/Turabian StyleShen, Yan, Ping Wang, Xuesong Wang, and Ke Sun. 2021. "Application of Empirical Mode Decomposition and Extreme Learning Machine Algorithms on Prediction of the Surface Vibration Signal" Energies 14, no. 22: 7519. https://doi.org/10.3390/en14227519
APA StyleShen, Y., Wang, P., Wang, X., & Sun, K. (2021). Application of Empirical Mode Decomposition and Extreme Learning Machine Algorithms on Prediction of the Surface Vibration Signal. Energies, 14(22), 7519. https://doi.org/10.3390/en14227519