
State-Space Approach for SPMSM Sensorless Passive Algorithm Tuning





Abstract
:
1. Introduction
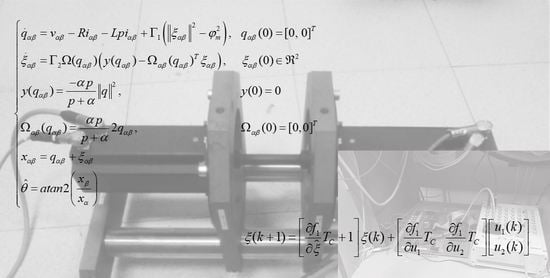
2. RFO Algorithm and Mathematical Modelling
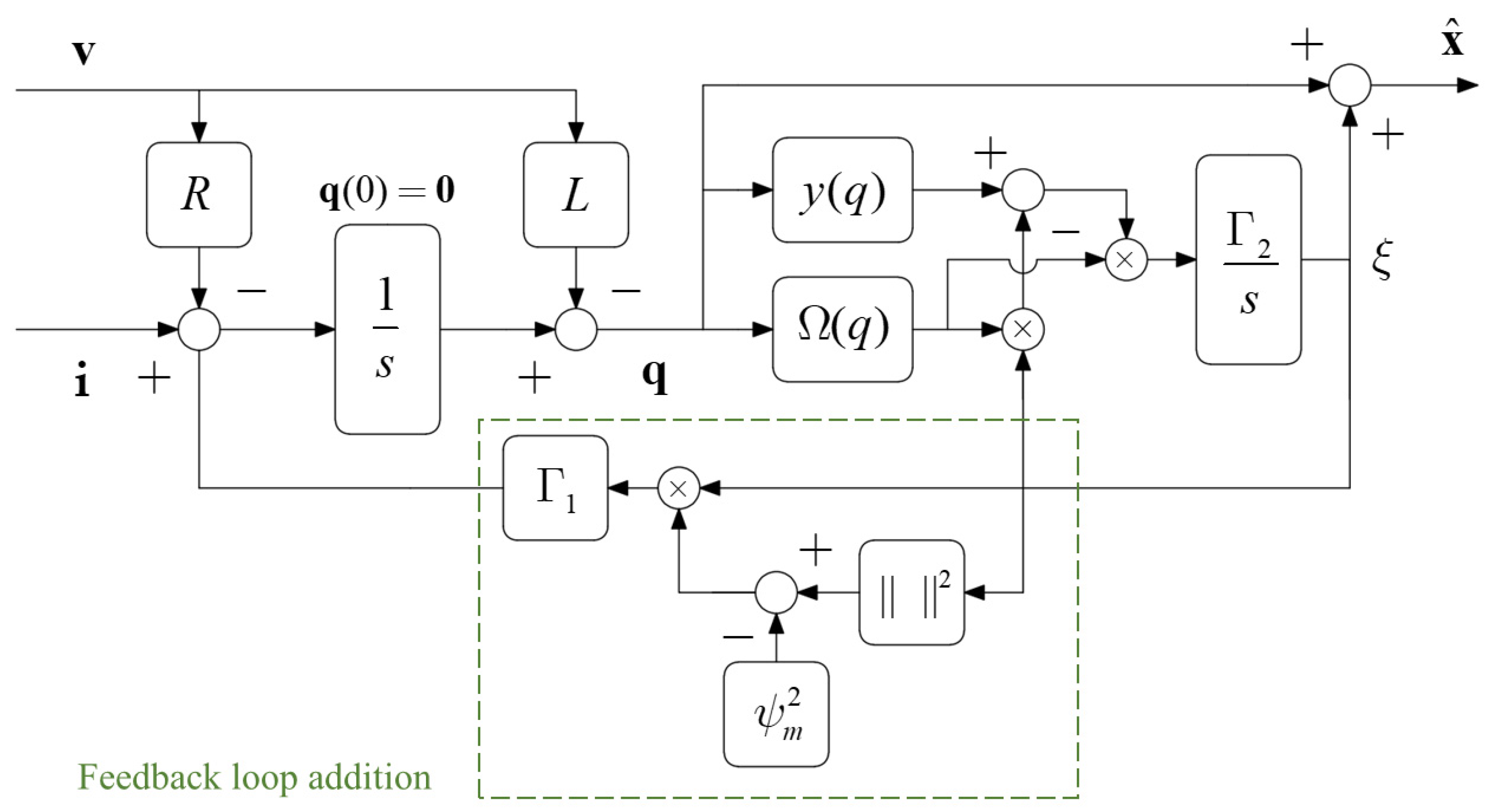
2.1. Observer without the Feedback Loop to Avoid DC Disturbances
2.2. Feedback Addition to Avoid DC Disturbances
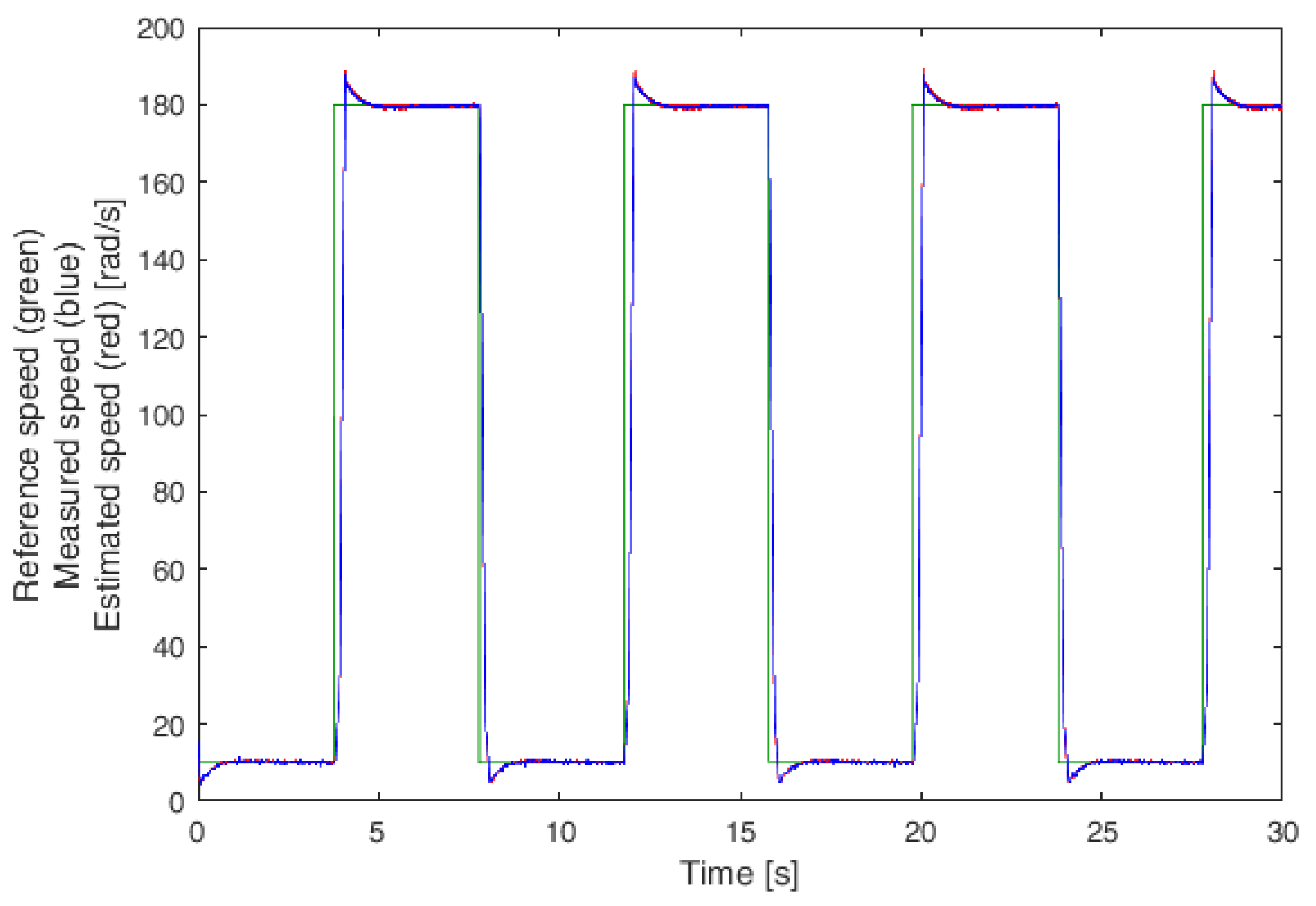
3. Simulation Results
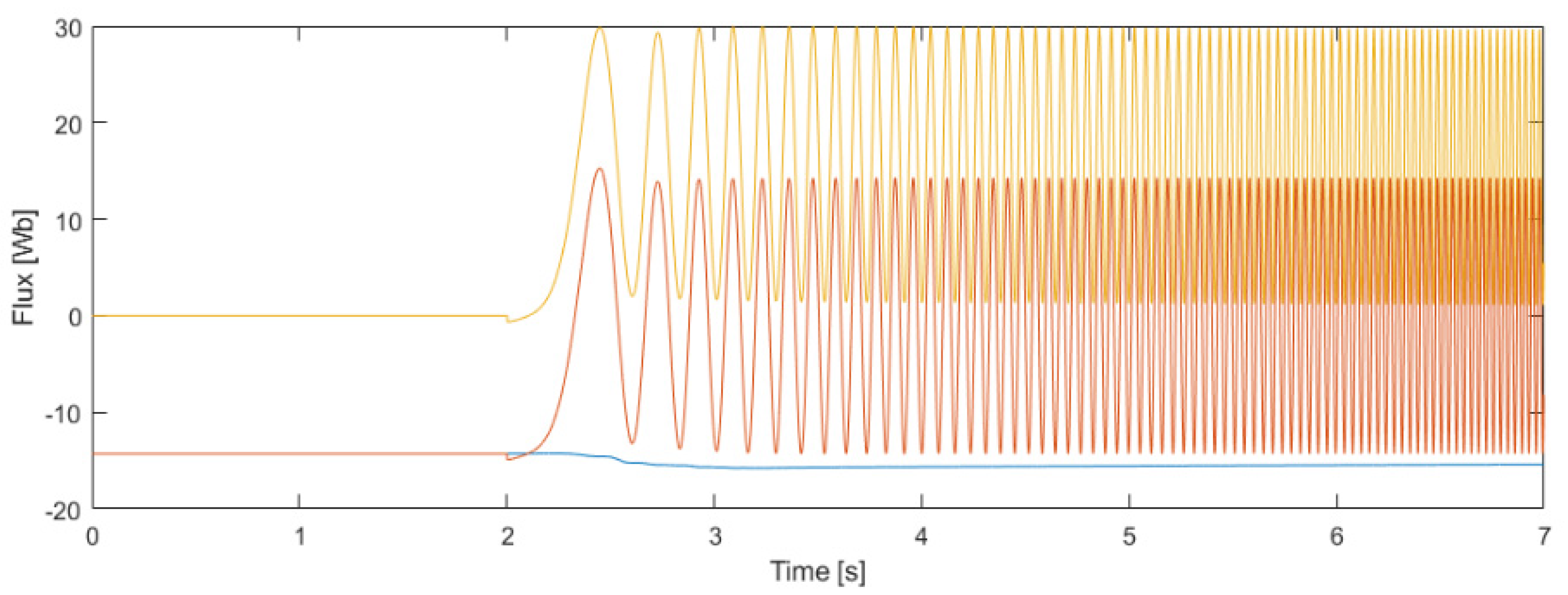
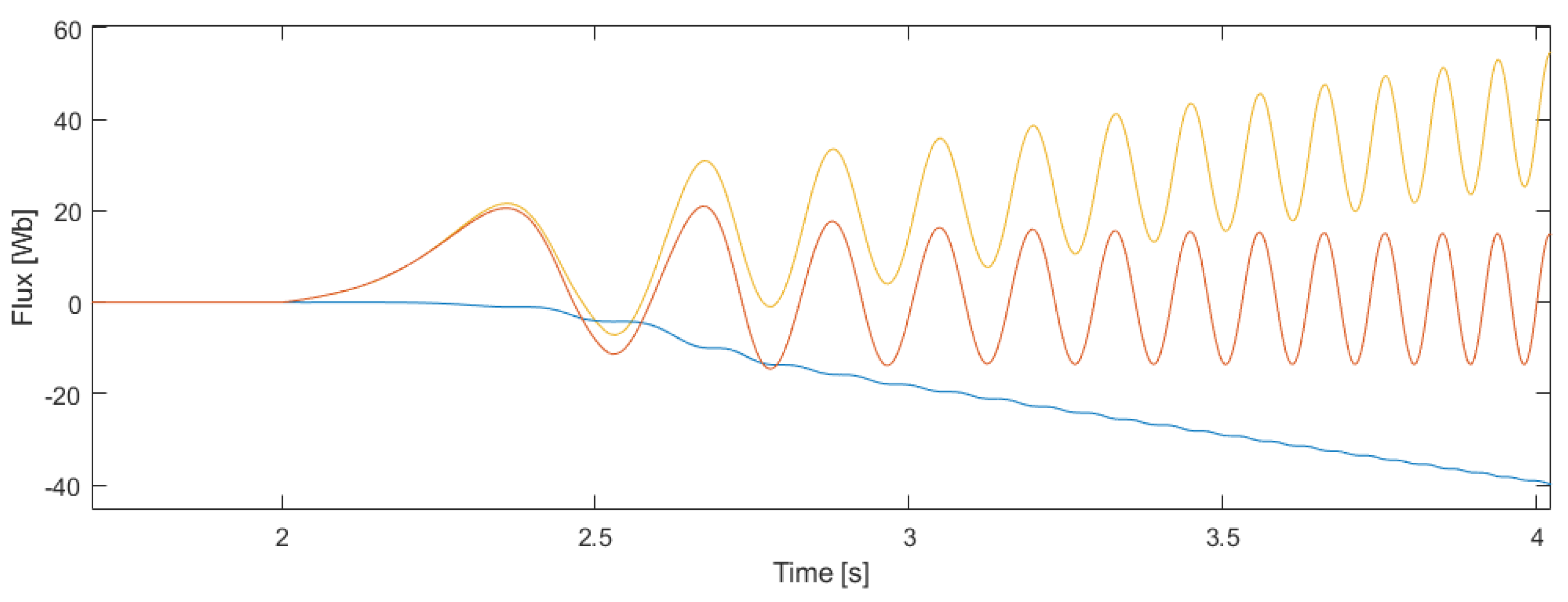
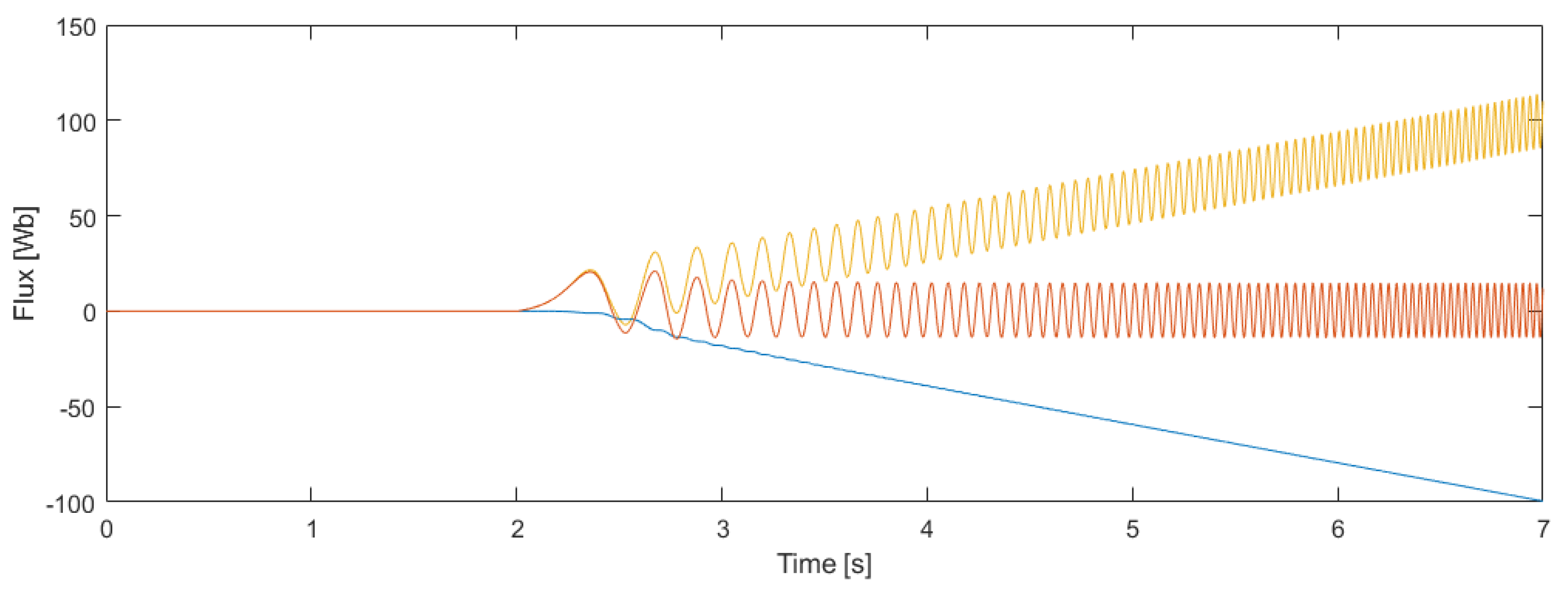
3.1. Observer without the Feedback Loop to Avoid DC Disturbances
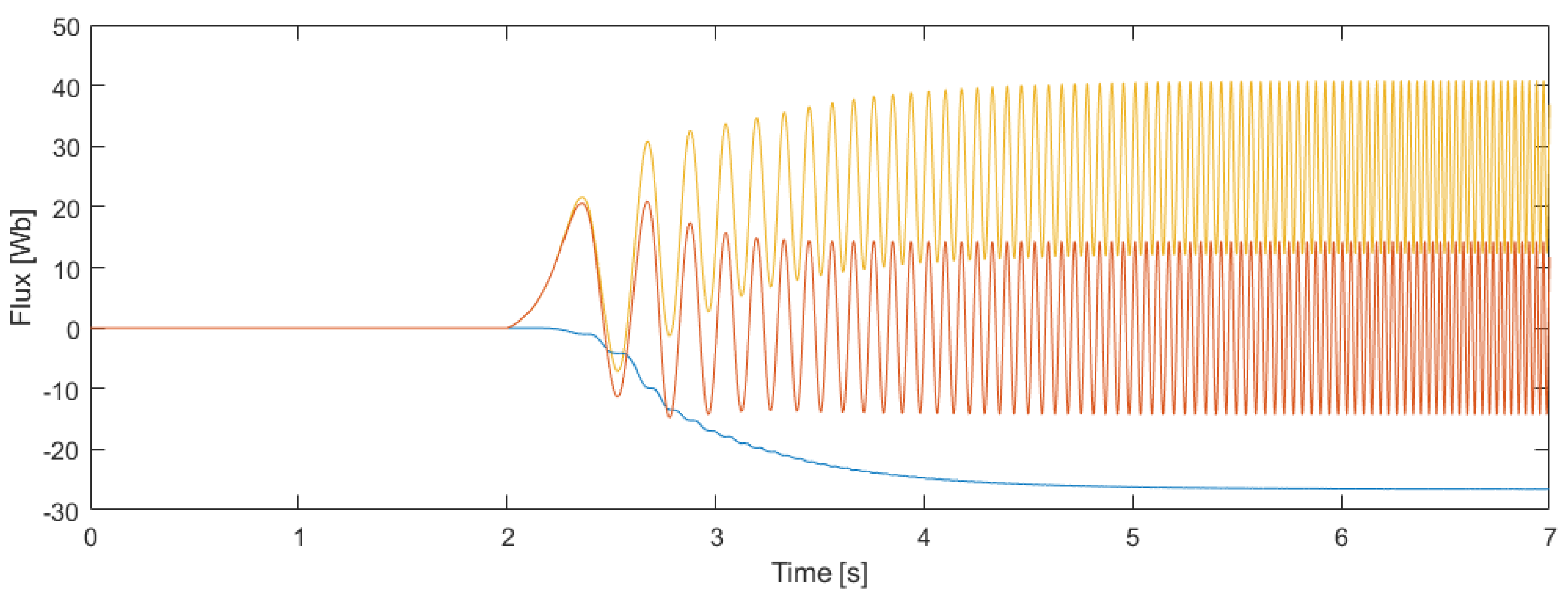
3.2. Observer with the Addition of the Feedback Loop to Avoid DC Disturbances
4. Definition of Gain
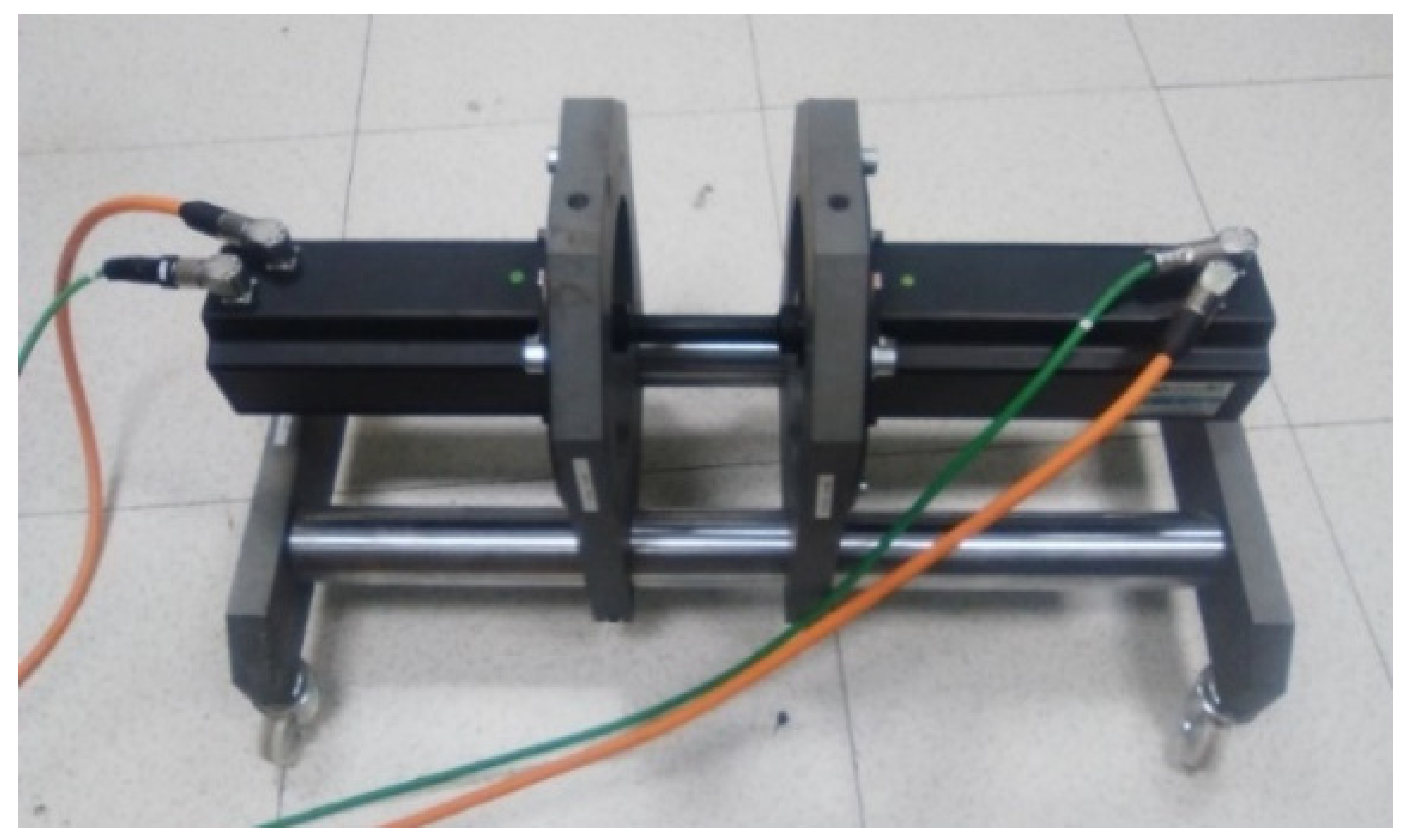
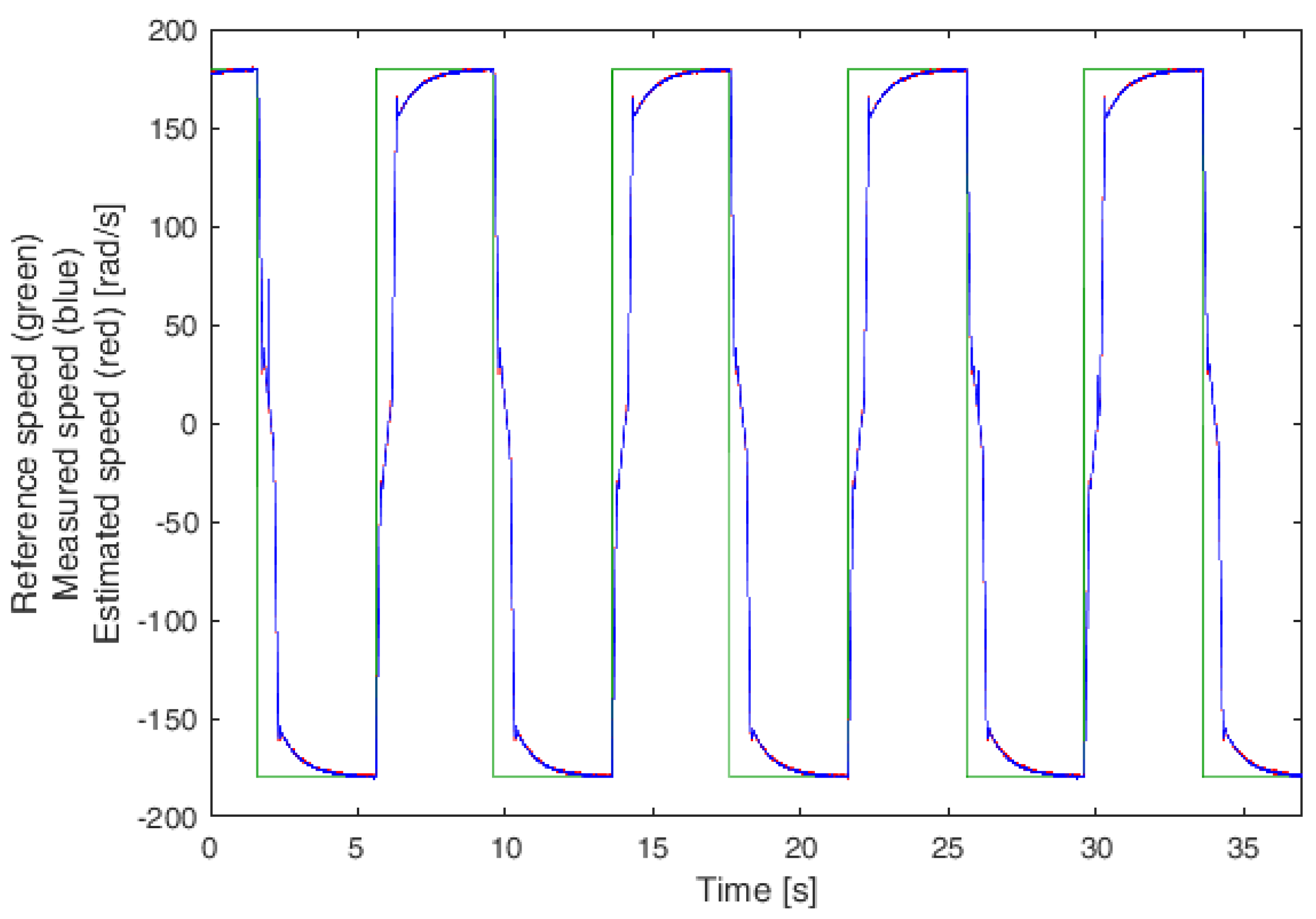
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Lara, J.; Chandra, A. Performance Investigation of Two Novel HSFSI Demodulation Algorithms for Encoderless FOC of PMSMs Intended for EV Propulsion. IEEE Trans. Ind. Electron. 2017, 65, 1074–1083. [Google Scholar] [CrossRef]
- Pando-Acedo, J.; Romero-Cadaval, E.; Milanes-Montero, M.I.; Barrero-Gonzalez, F. Improvements on a Sensorless Scheme for a Surface-Mounted Permanent Magnet Synchronous Motor Using Very Low Voltage Injection. Energies 2020, 13, 2732. [Google Scholar] [CrossRef]
- Dwivedi, P.K.; Seth, A.K.; Singh, M. Sensorless Speed Control of PMSM Motor for Wide Speed Range. In Proceedings of the 2021 1st International Conference on Power Electronics and Energy (ICPEE), Bhubaneswar, India, 2–3 January 2021. [Google Scholar]
- Dilys, J.; Stankevič, V.; Łuksza, K. Implementation of Extended Kalman Filter with Optimized Execution Time for Sensorless Control of a PMSM Using ARM Cortex-M3 Microcontroller. Energies 2021, 14, 3491. [Google Scholar] [CrossRef]
- Ogasawara, S.; Akagi, H. Implementation and Position Control Performance of a Position-Sensorless IPM Motor Drive System Based on Magnetic Saliency. IEEE Trans. Ind. Appl. 1998, 34, 806–812. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.M.; Zhu, Z.Q. Sensorless Control Strategy by Square-Waveform High-Frequency Pulsating Signal Injection Into Stationary Reference Frame. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 2, 171–180. [Google Scholar] [CrossRef]
- Tuovinen, T.; Hinkkanen, M. Adaptive Full-Order Observer with High-Frequency Signal Injection for Synchronous Reluctance Motor Drives. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 2, 181–189. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Tomita, M.; Doki, S.; Okuma, S. An extended electromotive force model for sensorless control of interior permanent-magnet synchronous motors. IEEE Trans. Ind. Electron. 2003, 50, 288–295. [Google Scholar] [CrossRef]
- Wang, G.; Ding, L.; Li, L.; Xu, J.; Zhang, G.; Zhan, H.; Ni, R.; Xu, D. Enhanced Position Observer Using Second-Order Generalized Integrator for Sensorless Interior Permanent Magnet Synchronous Motor Drives. IEEE Trans. Energy Convers. 2014, 29, 486–495. [Google Scholar]
- Kim, J.; Jeong, I.; Nam, K.; Yang, J.; Hwang, T. Sensorless Control of PMSM in a High-Speed Region Considering Iron Loss. IEEE Trans. Ind. Electron. 2015, 62, 6151–6159. [Google Scholar] [CrossRef]
- Rajamani, R. Observers for Lipschitz nonlinear systems. IEEE Trans. Autom. Control. 1998, 43, 397–401. [Google Scholar] [CrossRef]
- Quang, N.K.; Hieu, N.T.; Ha, Q. FPGA-Based Sensorless PMSM Speed Control Using Reduced-Order Extended Kalman Filters. IEEE Trans. Ind. Electron. 2014, 61, 6574–6582. [Google Scholar] [CrossRef]
- Gierczynski, M.; Grzesiak, L. Comparative Analysis of the Steady-State Model Including Non-Linear Flux Linkage Surfaces and the Simplified Linearized Model when Applied to a Highly-Saturated Permanent Magnet Synchronous Machine—Evaluation Based on the Example of the BMW i3 Traction Motor. Energies 2021, 14, 2343. [Google Scholar]
- Yan, Z.; Utkin, V. Sliding mode observers for electric machines—An overview. In Proceedings of the IEEE 2002 28th Annual Conference of the Industrial Electronics Society. IECON 02, Seville, Spain, 5–8 November 2002; pp. 1842–1847. [Google Scholar]
- Wang, G.; Li, Z.; Zhang, G.; Yu, Y.; Xu, D. Quadrature PLL-Based High-Order Sliding-Mode Observer for IPMSM Sensorless Control With Online MTPA Control Strategy. IEEE Trans. Energy Convers. 2013, 28, 214–224. [Google Scholar] [CrossRef]
- Hongryel, K.; Jubum, S.; Jangmyung, L. A High-Speed Sliding-Mode Observer for the Sensorless Speed Control of a PMSM. IEEE Trans. Ind. Electron. 2011, 58, 4069–4077. [Google Scholar] [CrossRef]
- Qiao, Z.; Shi, T.; Wang, Y.; Yan, Y.; Xia, C.; He, X. New Sliding-Mode Observer for Position Sensorless Control of Permanent-Magnet Synchronous Motor. IEEE Trans. Ind. Electron. 2013, 60, 710–719. [Google Scholar] [CrossRef]
- Liang, D.; Li, J.; Qu, R. Sensorless Control of Permanent Magnet Synchronous Machine Based on Second-Order Sliding-Mode Observer With Online Resistance Estimation. IEEE Trans. Ind. Appl. 2017, 53, 3672–3682. [Google Scholar] [CrossRef]
- Bao, D.; Wu, H.; Wang, R.; Zhao, F.; Pan, X. Full-Order Sliding Mode Observer Based on Synchronous Frequency Tracking Filter for High-Speed Interior PMSM Sensorless Drives. Energies 2020, 13, 6511. [Google Scholar] [CrossRef]
- Haus, B.; Mercorelli, P.; Aschemann, H. Gain Adaptation in Sliding Mode Control Using Model Predictive Control and Disturbance Compensation with Application to Actuators. Information 2019, 10, 182. [Google Scholar] [CrossRef] [Green Version]
- Ortega, R.; Praly, L.; Astolfi, A.; Lee, J.; Nam, K. Estimation of Rotor Position and Speed of Permanent Magnet Synchronous Motors With Guaranteed Stability. IEEE Trans. Control. Syst. Technol. 2010, 19, 601–614. [Google Scholar] [CrossRef]
- Junggi, L.; Jinseok, H.; Kwanghee, N.; Ortega, R.; Praly, L.; Astolfi, A. Sensorless Control of Surface-Mount Permanent-Magnet Synchronous Motors Based on a Nonlinear Observer. IEEE Trans. Power Electron. 2010, 25, 290–297. [Google Scholar] [CrossRef] [Green Version]
- Bobtsov, A.A.; Pyrkin, A.A.; Ortega, R.; Vukosavic, S.N.; Stankovic, A.M.; Panteley, E.V. A robust globally convergent position observer for the permanent magnet synchronous motor. Automatica 2015, 61, 47–54. [Google Scholar] [CrossRef]
- Choi, J.; Nam, K.; Bobtsov, A.; Pyrkin, A.; Ortega, R. Robust Adaptive Sensorless Control for Permanent-Magnet Synchronous Motors. IEEE Trans. Power Electron. 2017, 32, 3989–3997. [Google Scholar] [CrossRef]
- Marchesoni, M.; Passalacqua, M.; Vaccaro, L.; Calvini, M.; Venturini, M. Performance improvement in a sensorless surface-mounted PMSM drive based on rotor flux observer. Control. Eng. Pract. 2020, 96, 104276. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Rated output power | 5600 W |
| Rated phase voltage RMS | 380 V |
| Pole pairs | 4 |
| Rated speed | 2000 rpm |
| Rated torque | 27 Nm |
| Rated current | 11.9 A |
| 0.335 Wb | |
| Stator resistance Rs | 0.68 Ω |
| Stator inductance Ls | 5.0 mH |
| Sampling time Tc | 200 μs |
| Parameter | Value |
|---|---|
| 0.013 | |
| 0.013 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carbone, L.; Cosso, S.; Marchesoni, M.; Passalacqua, M.; Vaccaro, L. State-Space Approach for SPMSM Sensorless Passive Algorithm Tuning. Energies 2021, 14, 7180. https://doi.org/10.3390/en14217180
Carbone L, Cosso S, Marchesoni M, Passalacqua M, Vaccaro L. State-Space Approach for SPMSM Sensorless Passive Algorithm Tuning. Energies. 2021; 14(21):7180. https://doi.org/10.3390/en14217180
Chicago/Turabian StyleCarbone, Lorenzo, Simone Cosso, Mario Marchesoni, Massimiliano Passalacqua, and Luis Vaccaro. 2021. "State-Space Approach for SPMSM Sensorless Passive Algorithm Tuning" Energies 14, no. 21: 7180. https://doi.org/10.3390/en14217180
APA StyleCarbone, L., Cosso, S., Marchesoni, M., Passalacqua, M., & Vaccaro, L. (2021). State-Space Approach for SPMSM Sensorless Passive Algorithm Tuning. Energies, 14(21), 7180. https://doi.org/10.3390/en14217180