
Low-Speed Transient and Steady-State Performance Analysis of IPMSM for Nonlinear Speed Regulator with Effective Compensation Scheme



Abstract
:
1. Introduction
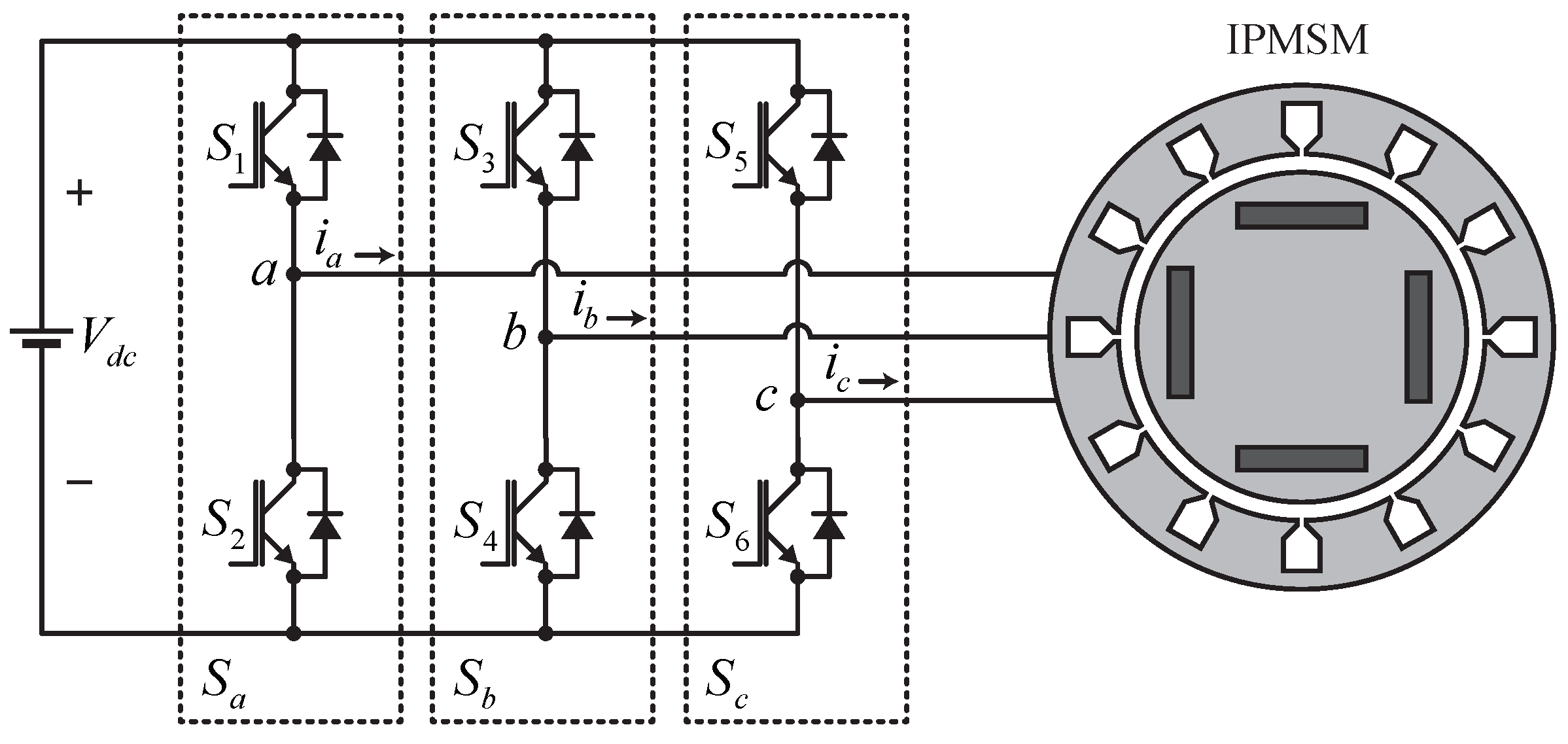
2. IPMSM Modeling and Control
2.1. Dynamic Model of IPMSM
2.2. Maximum Torque per Armature (MTPA)
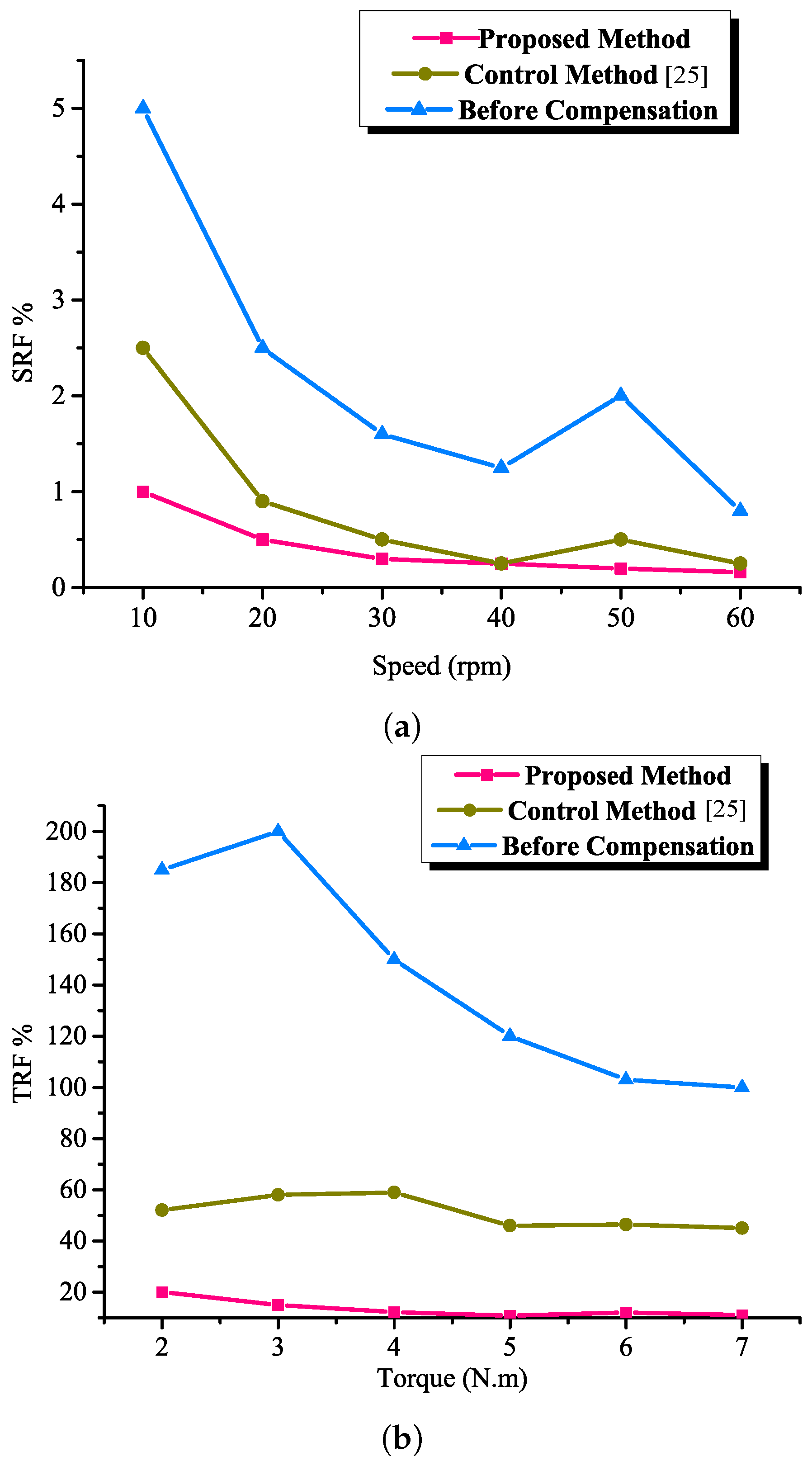
3. Torque Pulsation Analysis
3.1. Flux Harmonics
3.2. Current Sensor Offset Error
3.3. Cogging Torque
4. Design of Proposed Scheme
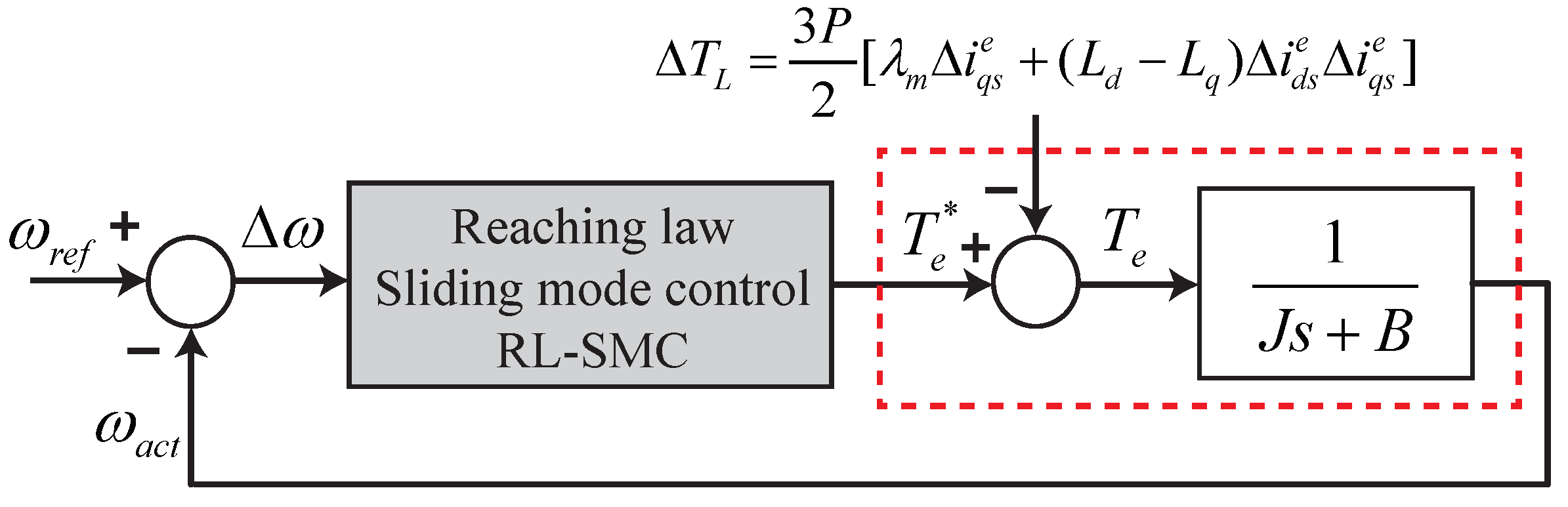
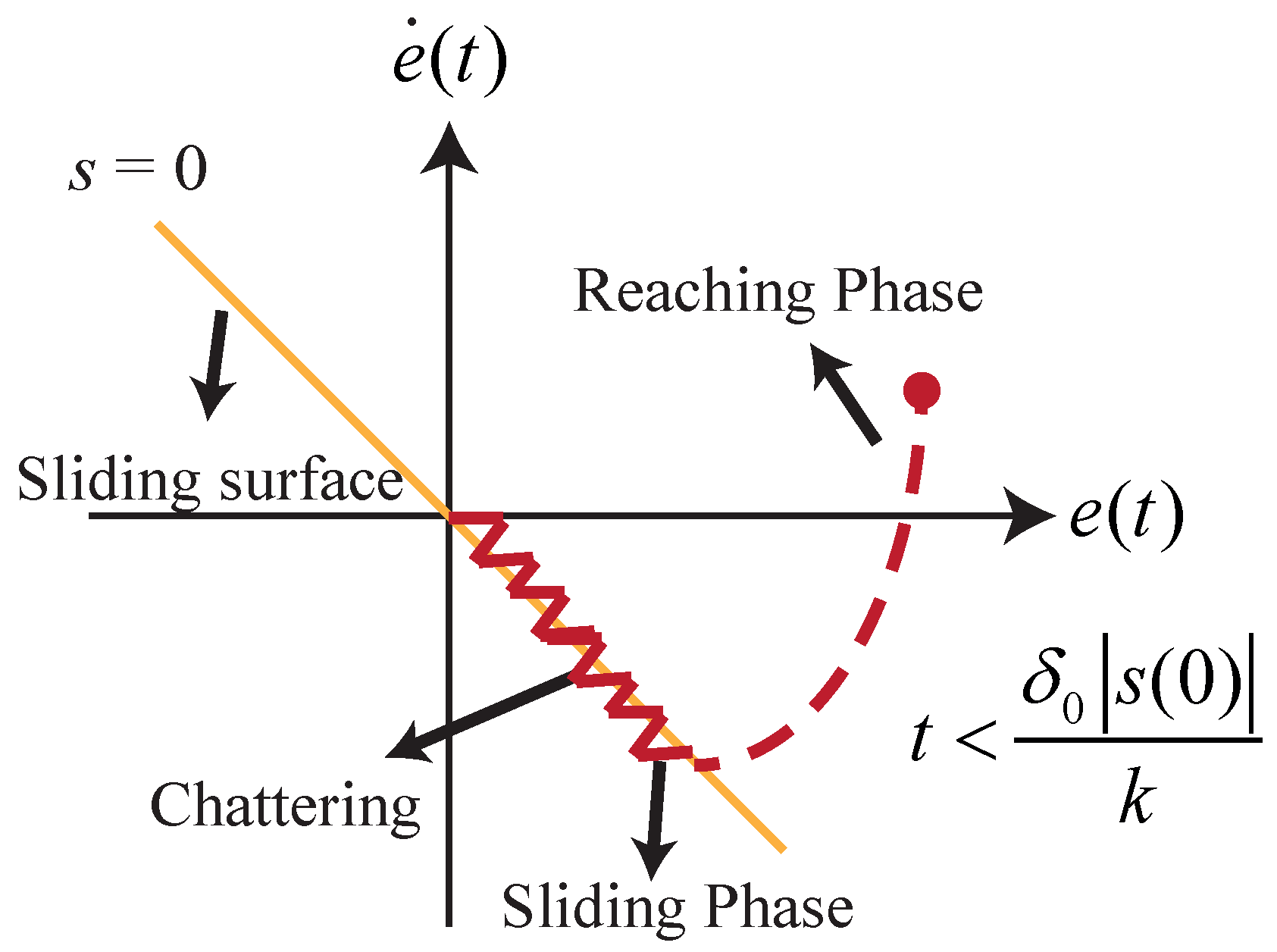
4.1. Reaching Law Sliding Mode Control
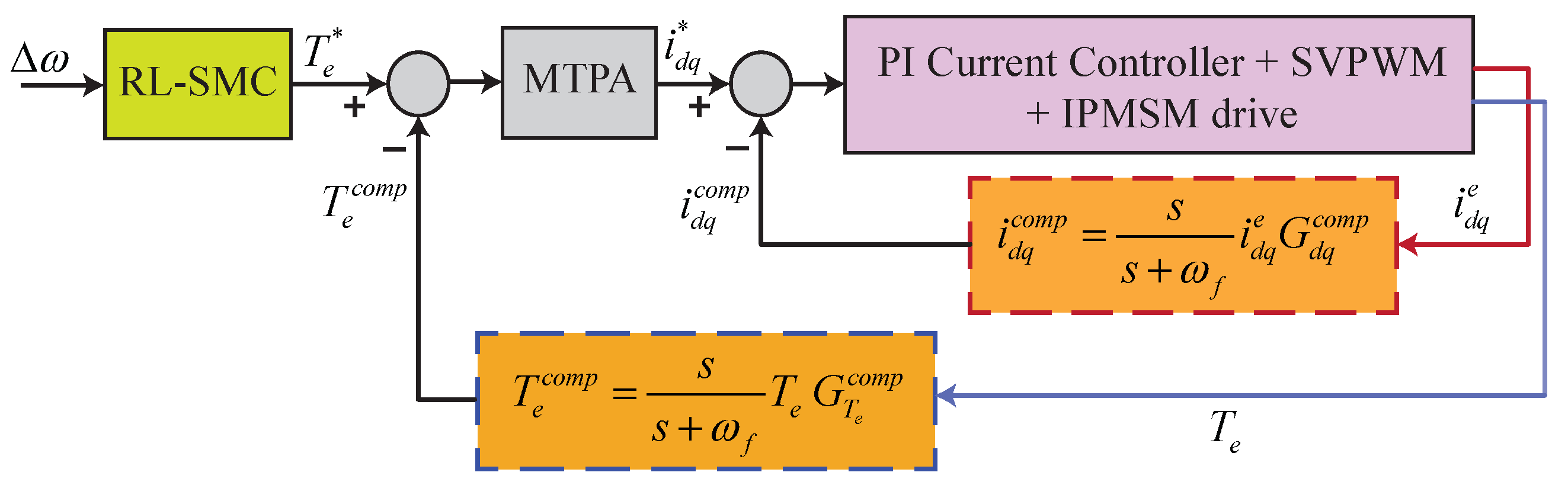
4.2. Speed Ripple Compensation Scheme
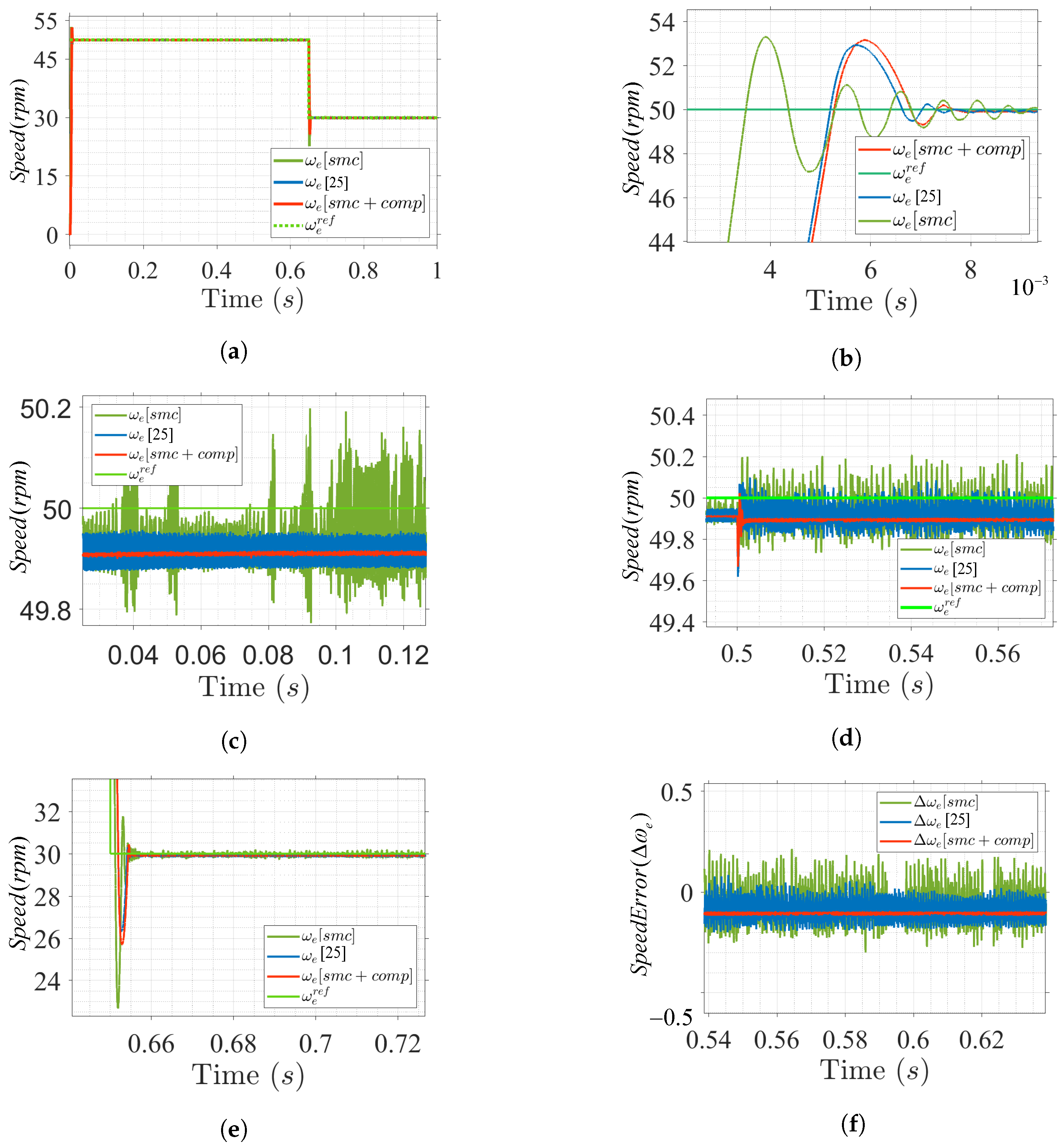
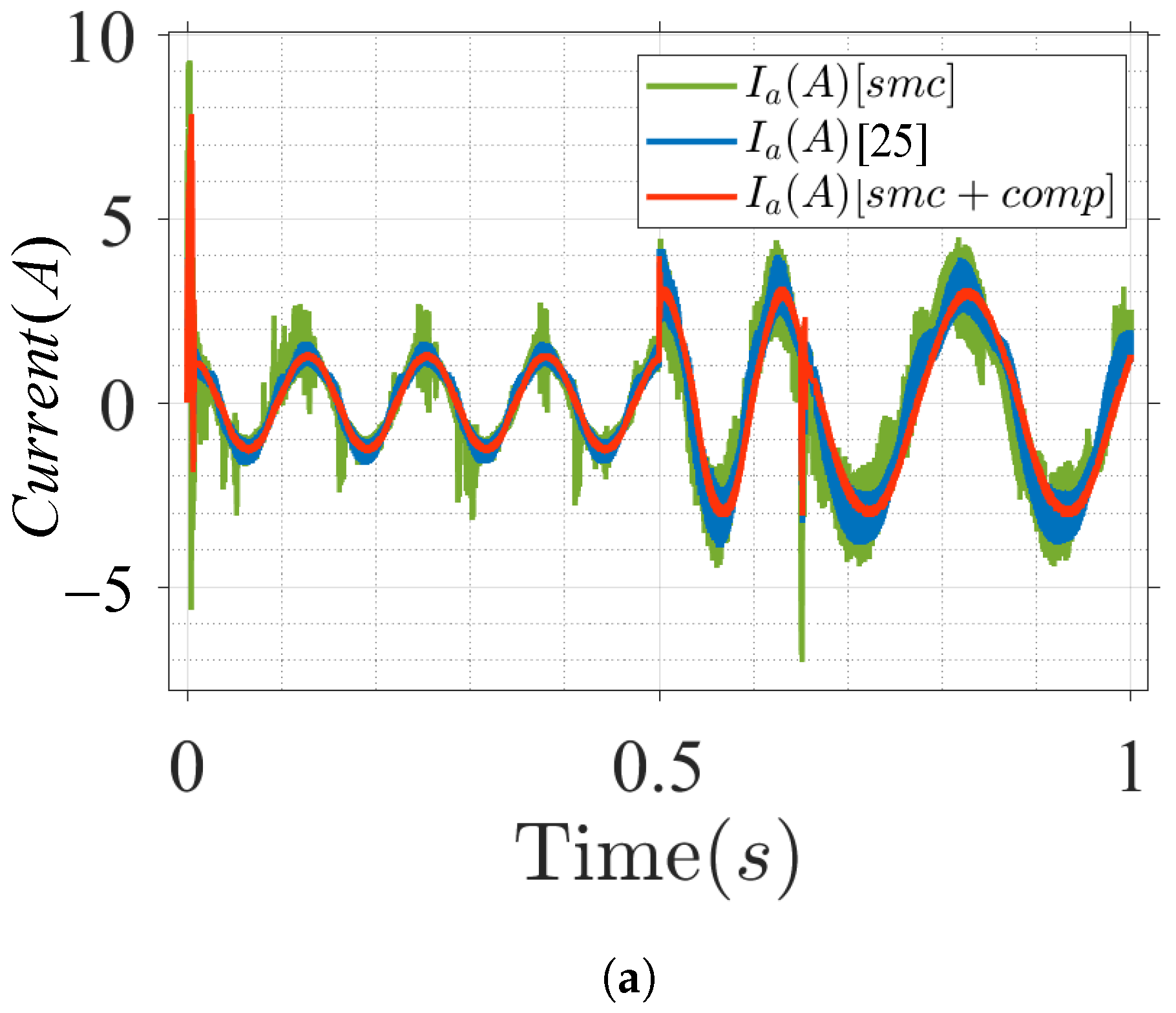
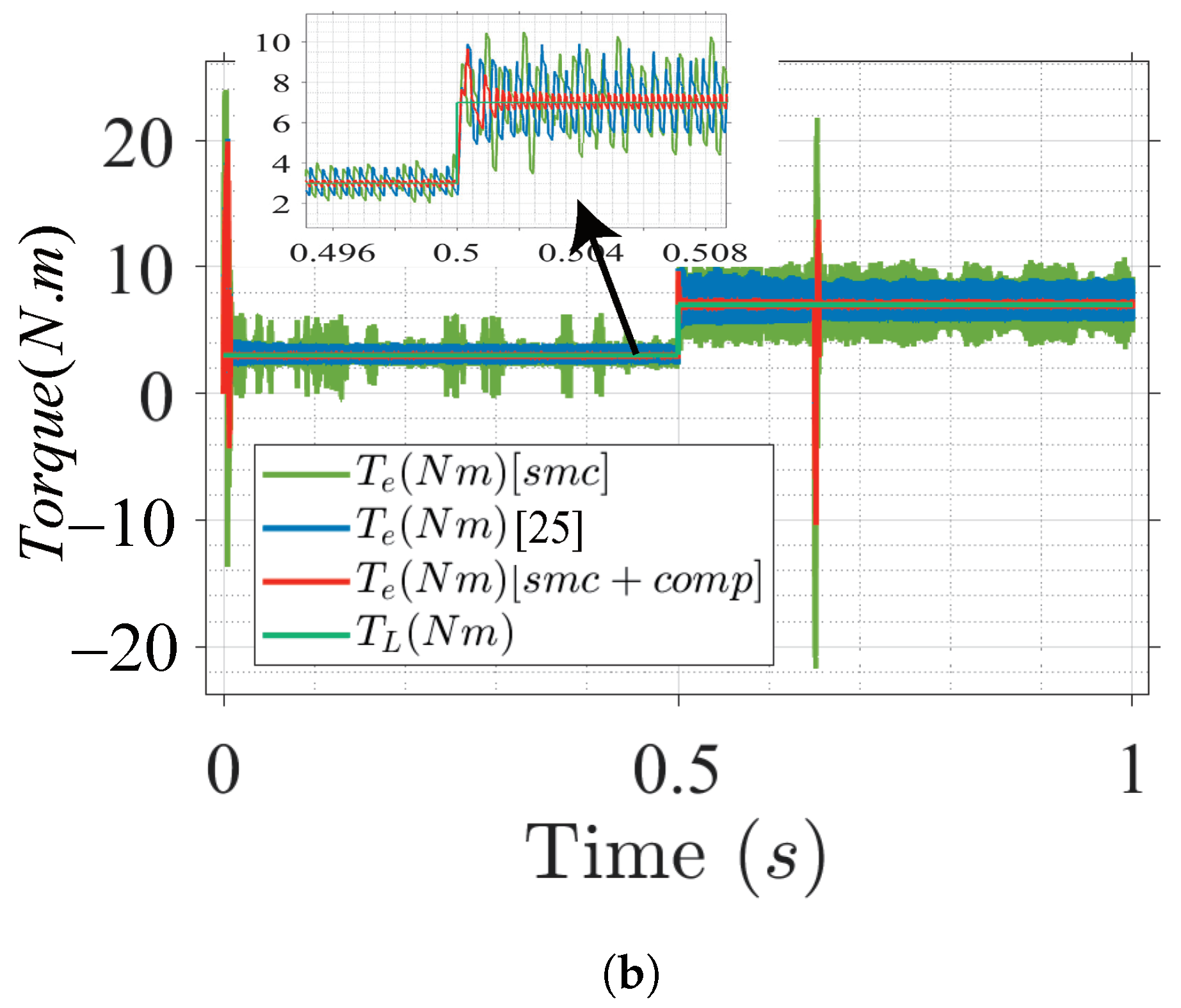
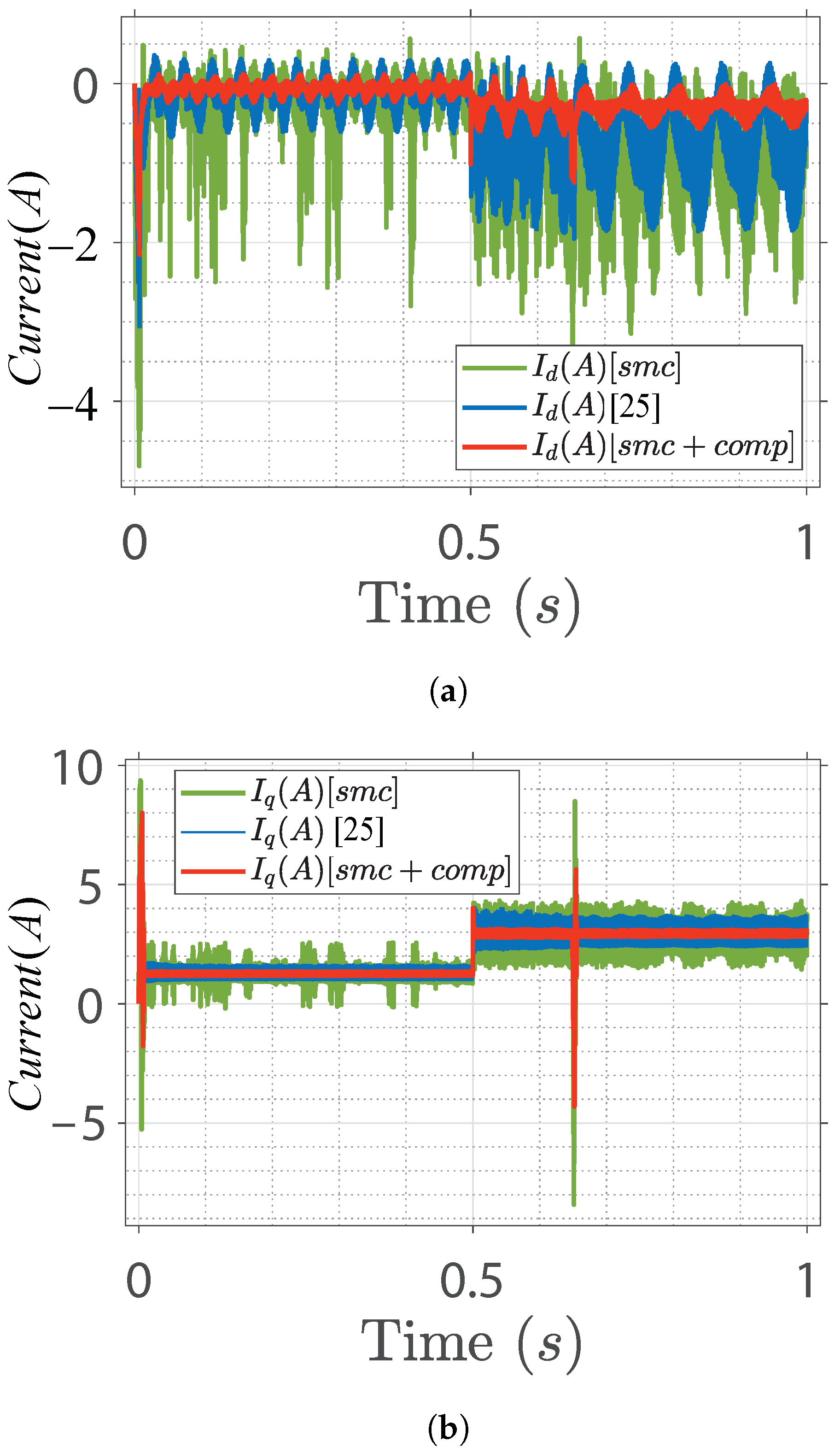
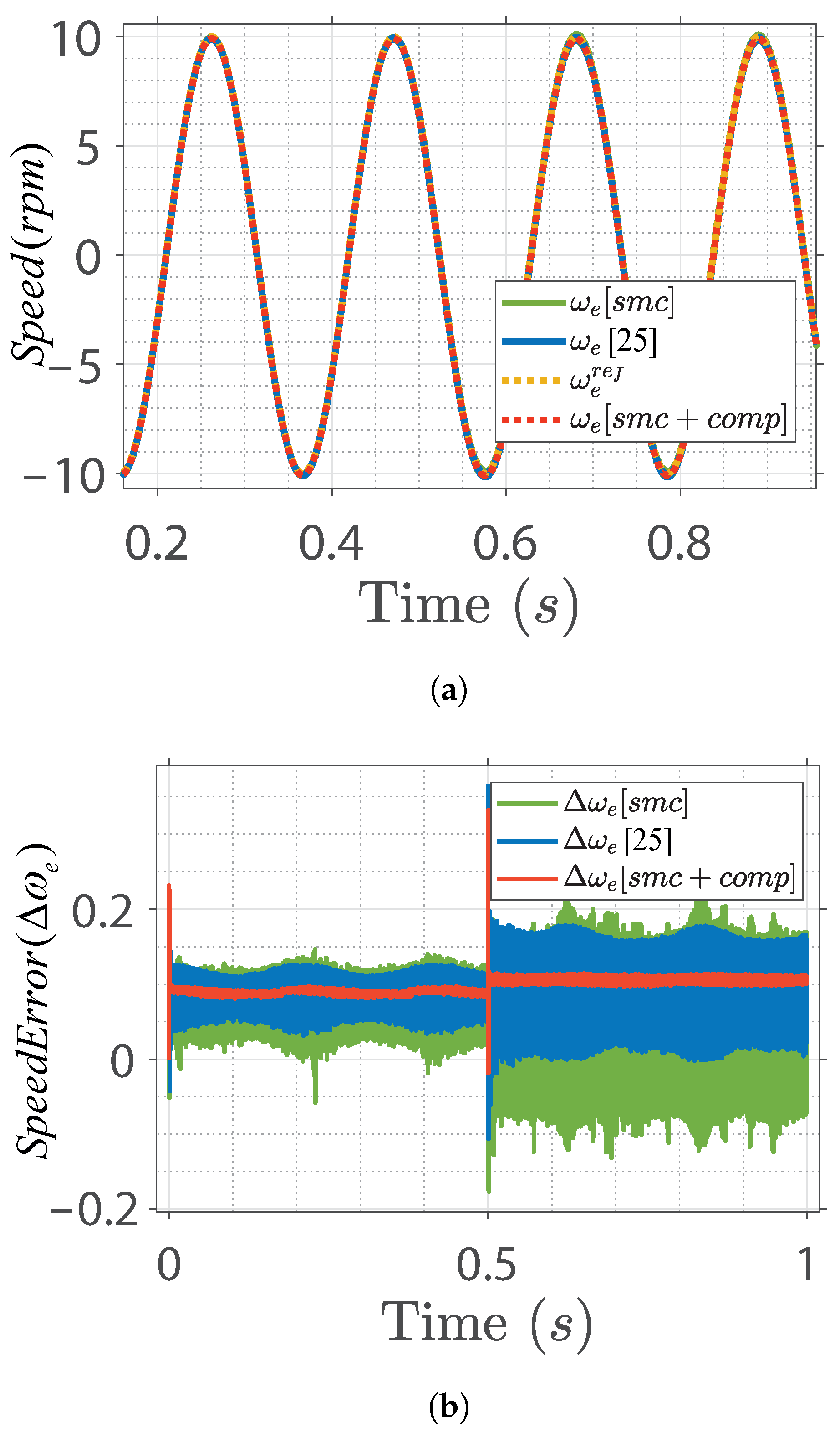
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Nam, K. AC Motor Control and Electric Vehicle Applications; CRC Press: New York, NY, USA, 2010; pp. 133–158. [Google Scholar]
- Song, X.; Fang, J.; Han, B. High-precision rotor position detection for high-speed surface PMSM drive based on linear hall-effect sensors. IEEE Trans. Power Electron. 2016, 31, 4720–4731. [Google Scholar]
- Wu, S.; Zhang, J. A robust adaptive control for permanent magnet synchronous motor subject to parameter uncertainties and input saturations. J. Electr. Eng. Technol. 2018, 13, 2125–2133. [Google Scholar]
- Feng, G.; Lai, C.; Kar, N.C. Practical testing solutions to optimal stator harmonic current design for PMSM torque ripple minimization using speed harmonics. IEEE Trans. Power Electron. 2018, 33, 5181–5191. [Google Scholar] [CrossRef]
- Tursini, M.; Parasiliti, F.; Zhang, D. Real-time gain tuning of PI controllers for high-performance PMSM drives. IEEE Trans. Ind. Appl. 2002, 38, 1018–1026. [Google Scholar] [CrossRef]
- Yadav, D.; Verma, A. Performance analysis of permanent magnet synchronous motor drive using Particle Swarm Optimization technique. In Proceedings of the International Conference on Emerging Trends in Electrical Electronics and Sustainable Energy Systems, Sultanpur, India, 11–12 March 2016; pp. 280–285. [Google Scholar]
- Rovere, L.; Formentini, A.; Zanchetta, P. FPGA implementation of a novel oversampling deadbeat controller for PMSM drives. IEEE Trans. Ind. Electron. 2019, 66, 3731–3741. [Google Scholar] [CrossRef]
- Lee, J.S.; Lorenz, R.D. Robustness analysis of deadbeat-direct torque and flux control for IPMSM drives. IEEE Trans. Ind. Electron. 2016, 63, 2775–2784. [Google Scholar] [CrossRef]
- Wang, S.; Wan, S. Full digital deadbeat speed control for permanent magnet synchronous motor with load compensation. IET Power Electron. 2013, 6, 634–641. [Google Scholar] [CrossRef]
- Li, S.; Gu, H. Fuzzy adaptive internal model control schemes for PMSM speed-regulation system. IEEE Trans. Ind. Inform. 2012, 8, 767–779. [Google Scholar] [CrossRef]
- Bouguenna, I.F.; Tahour, A.; Kennel, R.; Abdelrahem, M. Multiple-vector model predictive control with fuzzy logic for PMSM electric drive systems. Energies 2021, 14, 1727. [Google Scholar] [CrossRef]
- Chai, S.; Wang, L.; Rogers, E. A cascade MPC control structure for a PMSM with speed ripple minimization. IEEE Trans. Ind. Electron. 2013, 60, 2978–2987. [Google Scholar] [CrossRef] [Green Version]
- Tu, W.; Luo, G.; Chen, Z.; Cui, L.; Kennel, R. Predictive cascaded speed and current control for PMSM drives with multi-timescale optimization. IEEE Trans. Power Electron. 2019, 34, 11046–11061. [Google Scholar] [CrossRef]
- Garcia, C.; Rodriguez, J.; Odhano, S.; Zanchetta, P.; Davari, S.A. Modulated model predictive speed control for PMSM drives. In Proceeding of the IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles and International Transportation Electrification Conference, Nottingham, UK, 7–9 November 2018; pp. 1–6. [Google Scholar]
- Gao, W.; Hung, J.C. Variable structure control of nonlinear systems: A new approach. IEEE Trans. Ind. Electron. 1993, 40, 45–55. [Google Scholar]
- Zaihidee, F.M.; Mekhilef, S.; Mubin, M. Robust speed control of PMSM using sliding mode control (SMC)—A review. Energies 2019, 12, 1669. [Google Scholar] [CrossRef] [Green Version]
- Fnaiech, M.A.; Betin, F.; Capolino, G.-A.; Fnaiech, F. Fuzzy logic and sliding-mode controls applied to six-phase induction machine with open phases. IEEE Trans. Ind. Electron. 2010, 57, 354–364. [Google Scholar] [CrossRef]
- Wang, L.; Chai, T.; Zhai, L. Neural-network-based terminal slidingmode control of robotic manipulators including actuator dynamics. IEEE Trans. Ind. Electron. 2009, 56, 3296–3304. [Google Scholar] [CrossRef]
- Li, S.; Zhou, M.; Yu, X. Design and implementation of terminal slidin gmode control method for PMSM speed regulation system. IEEE Trans. Ind. Inform. 2013, 9, 1879–1891. [Google Scholar] [CrossRef]
- Fei, Q.; Deng, Y.; Li, H.; Liu, J.; Shao, M. Speed ripple minimization of permanent magnet synchronous motor based on model predictive and iterative learning controls. IEEE Access 2019, 7, 31791–31800. [Google Scholar] [CrossRef]
- Qian, W.; Panda, S.K.; Xu, J.X. Torque ripple minimization in PM synchronous motors using iterative learning control. IEEE Trans. Power Electron. 2004, 19, 272–279. [Google Scholar] [CrossRef]
- Chan, C.C.; Jiang, J.Z.; Chen, G.H.; Wang, X.Y.; Chau, K.T. A novel polyphase multipole square-wave permanent magnet motor drive for electric vehicles. IEEE Trans. Ind. Appl. 1994, 30, 1258–1266. [Google Scholar] [CrossRef]
- Gebregergis, A.; Chowdhury, M.; Islam, M.; Sebastian, T. Modeling of permanent-magnet synchronous machine including torque ripple effects. IEEE Trans. Ind. Appl. 2015, 51, 232–239. [Google Scholar] [CrossRef]
- Kim, K.-C. A novel method for minimization of cogging torque and torque ripple for interior permanent magnet synchronous motor. IEEE Trans. Magn 2014, 50, 793–796. [Google Scholar] [CrossRef]
- Houari, A.; Bouabdallah, A.; Djerioui, A.; Machmoum, M.; Auger, F.; Darkawi, A.; Olivier, J.-C.; Benkhoris, M.F. An effective compensation technique for speed smoothness at low-speed operation of PMSM drives. IEEE Trans. Ind. Appl. 2018, 54, 647–655. [Google Scholar] [CrossRef]
- Ma, Z.; Saeidi, S.; Kennel, R. FPGA implementation of model predictive control with constant switching frequency for PMSM drives. IEEE Trans. Ind. Inform. 2014, 10, 2055–2063. [Google Scholar] [CrossRef]
- Mora, A.; Orellana, A.; Juliet, J.; Cárdenas, R. Model predictive torque control for torque ripple compensation in variable-speed PMSMs. IEEE Trans. Ind. Electron. 2016, 63, 4584–4592. [Google Scholar] [CrossRef]
- Usama, M.; Kim, J. Robust adaptive observer-based finite control set model predictive current control for sensorless speed control of surface permanent magnet synchronous motor. Trans. Inst. Meas. Control 2021, 43, 1416–1429. [Google Scholar] [CrossRef]
- Chung, D.W.; Sul, S.K. Analysis and compensation of current measurement error in vector-controlled AC motor drives. IEEE Trans. Ind. Appl. 1998, 34, 340–345. [Google Scholar] [CrossRef]
- Dosiek, L.; Pillay, P. Cogging torque reduction in permanent magnet machines. IEEE Trans. Ind. Appl. 2007, 43, 1565–1571. [Google Scholar] [CrossRef] [Green Version]
- Fallaha, C.J.; Saad, M.; Kanaan, H.Y.; Al-Haddad, K. Sliding-mode robot control with exponential reaching law. IEEE Trans. Ind. Electron. 2011, 58, 600–610. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| PWM period, | 100 s | Switching frequency, | 10 kHz |
| Stator resistance, | 2.5 | Poles pairs, P | 3 |
| d-axis inductance, | 15.025 mH | q-axis inductance, | 30.175 mH |
| Moment of inertia, J | 0.00365 kgm | Rotor flux, | 0.5283 Wb |
| Damping coefficient, B | 0.0011 Nm·s | Sampling time, | 1 s |
| Parameters | SMC | Control Scheme in [25] | Proposed Control |
|---|---|---|---|
| Speed tracking | Moderate | Good | Excellent |
| Speed steady-state error | Maximum | Moderate | Minimum |
| Speed overshoot | High (0.033) | Less (0.029) | Medium (0.031) |
| Speed settling time (ms) | High | Medium | Less |
| Speed ripple | 0.4 | 0.07 | 0.001 |
| Torque ripple | Higher | Medium | Lower |
| Current harmonics | Higher | Medium | Lower |
| Chattering analysis | Severe chattering | Moderate chattering | Minimum chattering |
| Control efficiency | Moderate | Good | Excellent |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Usama, M.; Kim, J. Low-Speed Transient and Steady-State Performance Analysis of IPMSM for Nonlinear Speed Regulator with Effective Compensation Scheme. Energies 2021, 14, 6679. https://doi.org/10.3390/en14206679
Usama M, Kim J. Low-Speed Transient and Steady-State Performance Analysis of IPMSM for Nonlinear Speed Regulator with Effective Compensation Scheme. Energies. 2021; 14(20):6679. https://doi.org/10.3390/en14206679
Chicago/Turabian StyleUsama, Muhammad, and Jaehong Kim. 2021. "Low-Speed Transient and Steady-State Performance Analysis of IPMSM for Nonlinear Speed Regulator with Effective Compensation Scheme" Energies 14, no. 20: 6679. https://doi.org/10.3390/en14206679
APA StyleUsama, M., & Kim, J. (2021). Low-Speed Transient and Steady-State Performance Analysis of IPMSM for Nonlinear Speed Regulator with Effective Compensation Scheme. Energies, 14(20), 6679. https://doi.org/10.3390/en14206679