

Efficient Local Path Planning Algorithm Using Artificial Potential Field Supported by Augmented Reality




Abstract
:1. Introduction
2. Artificial Potential Fields Algorithm
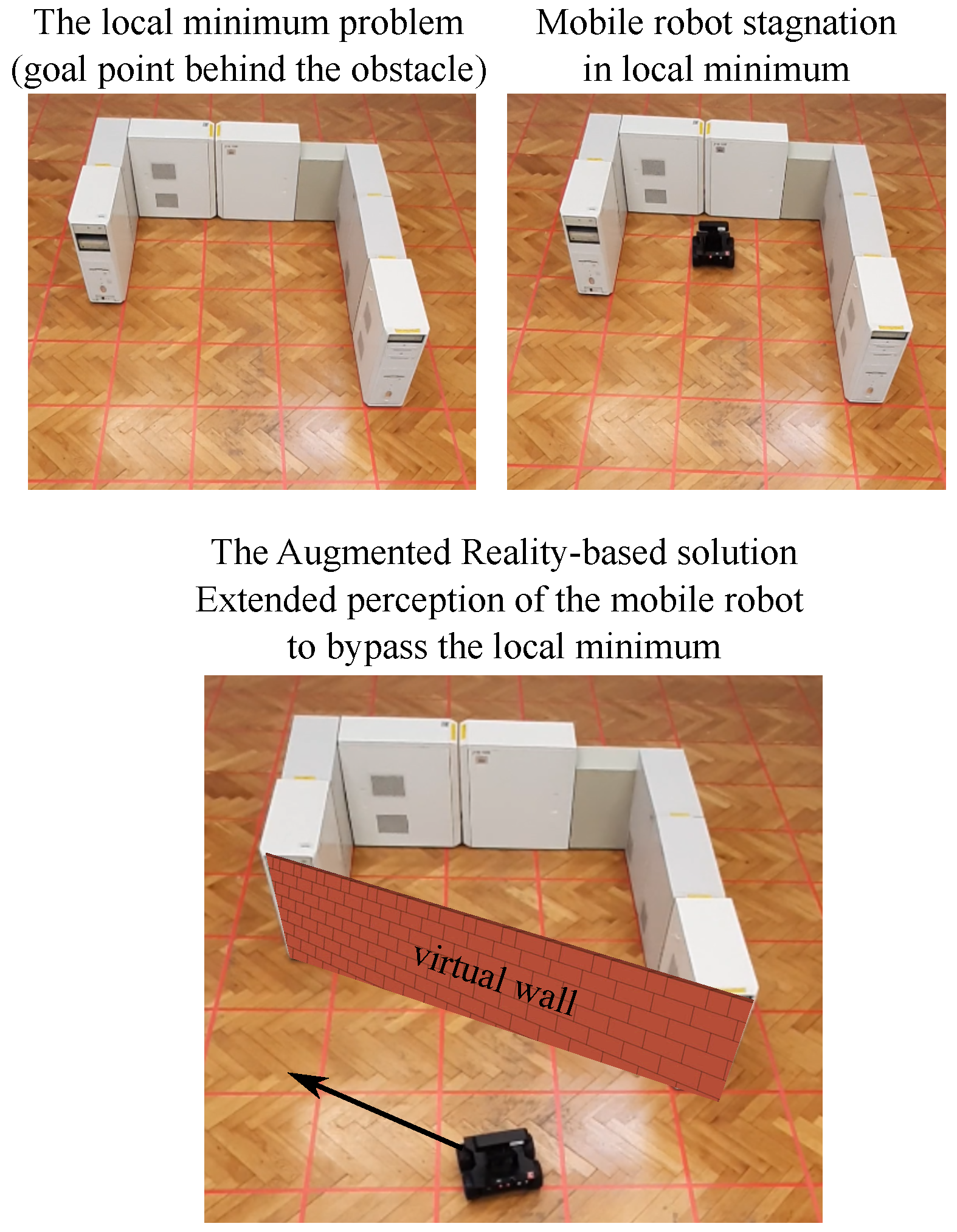
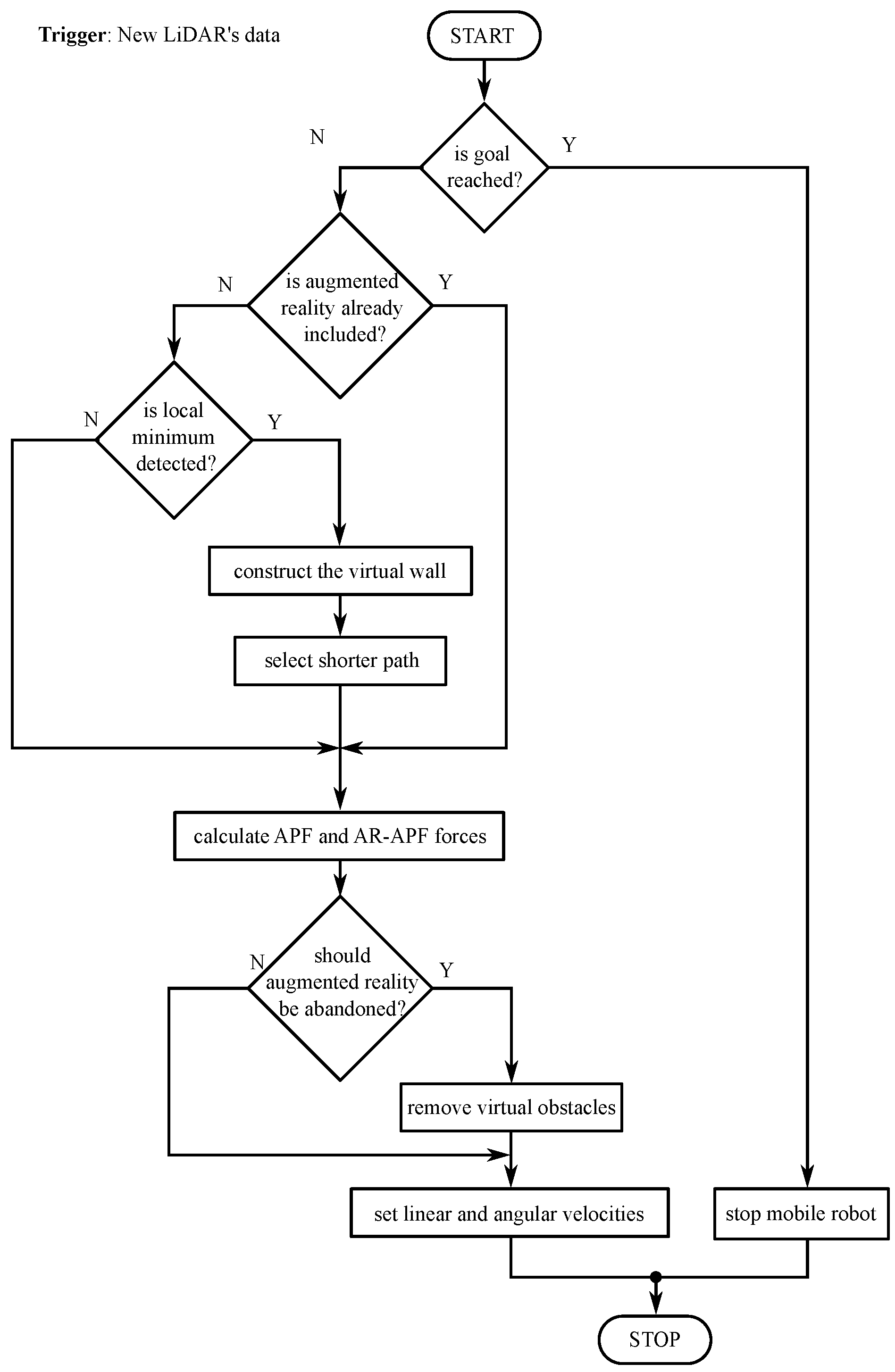
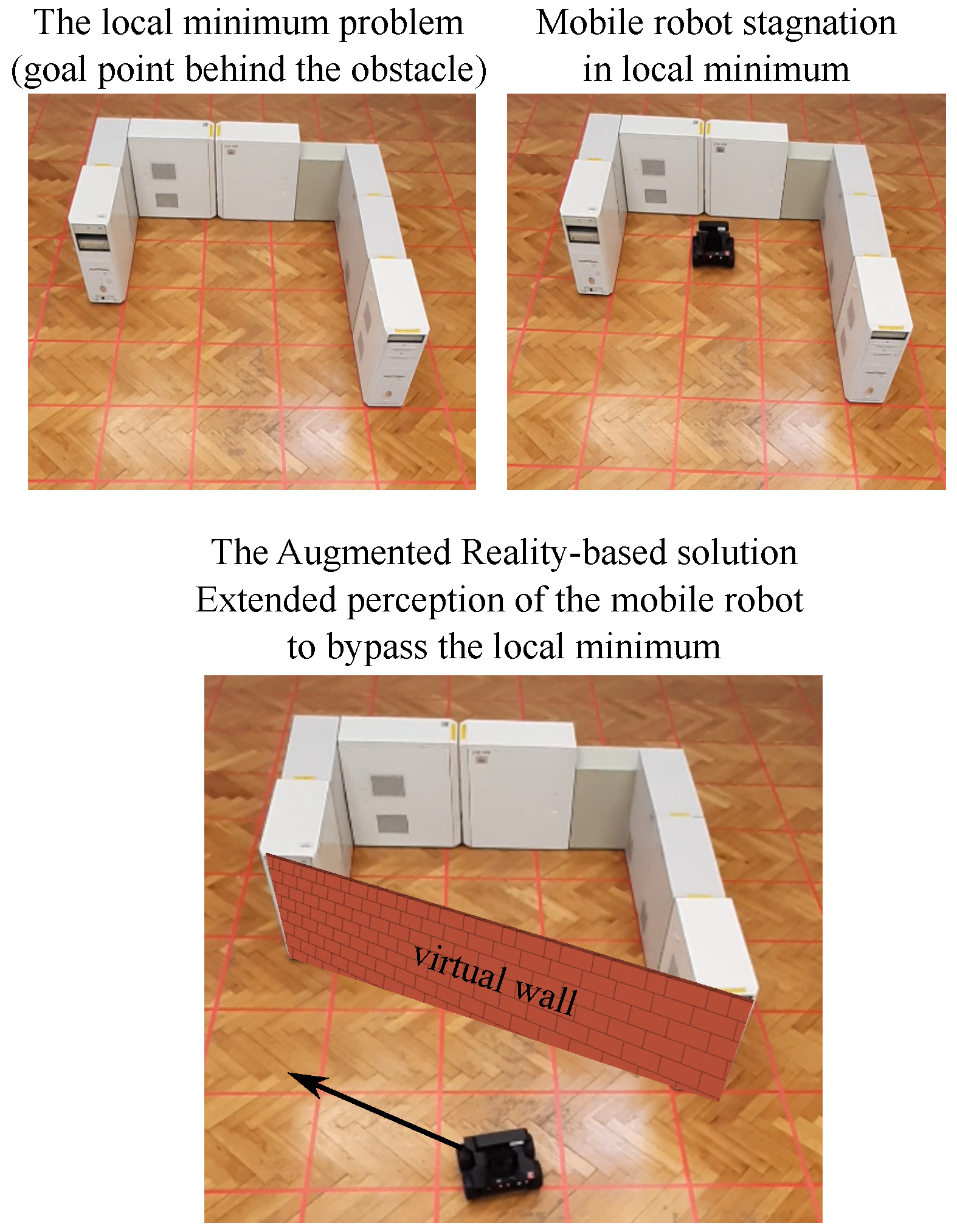
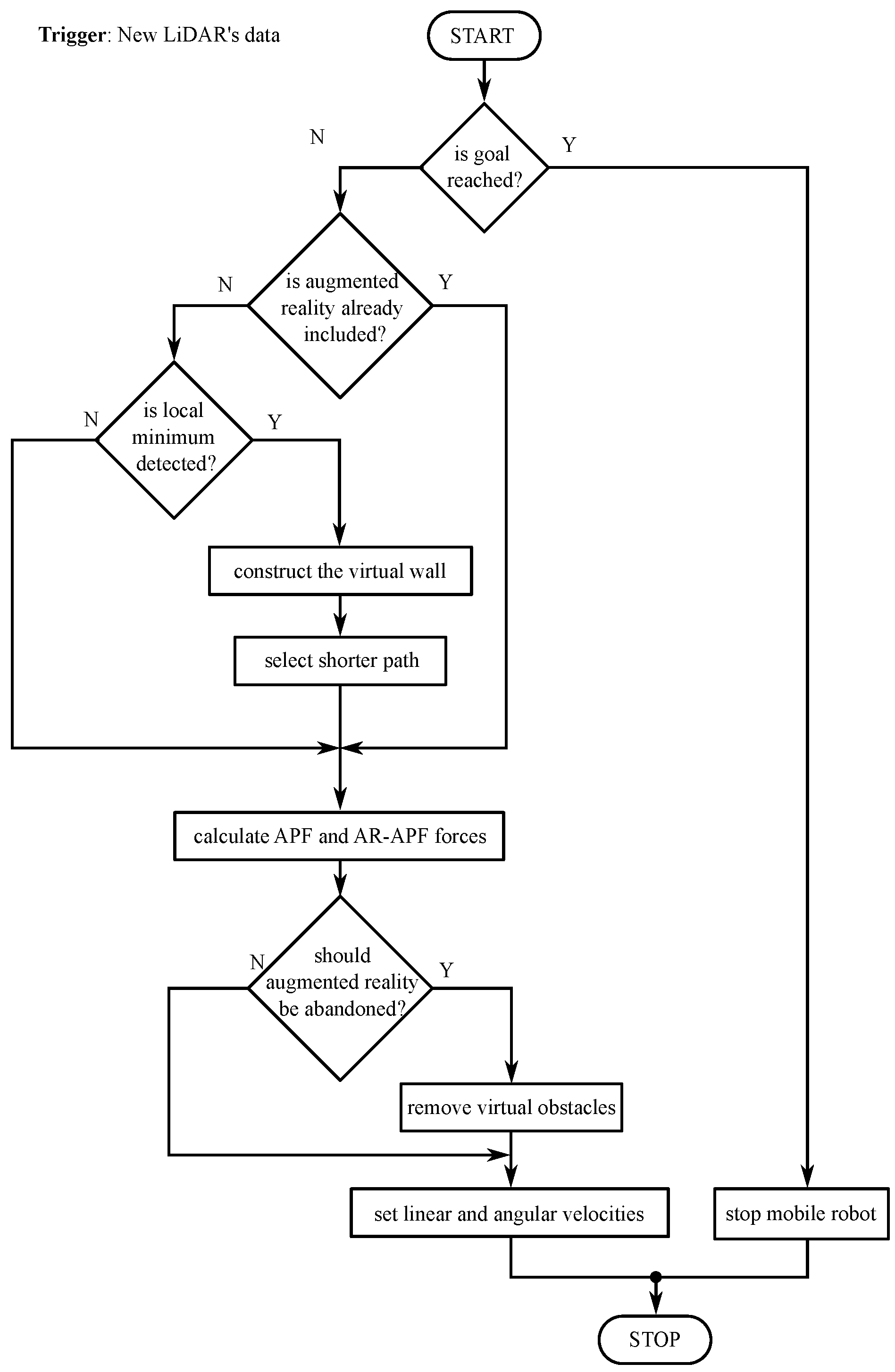
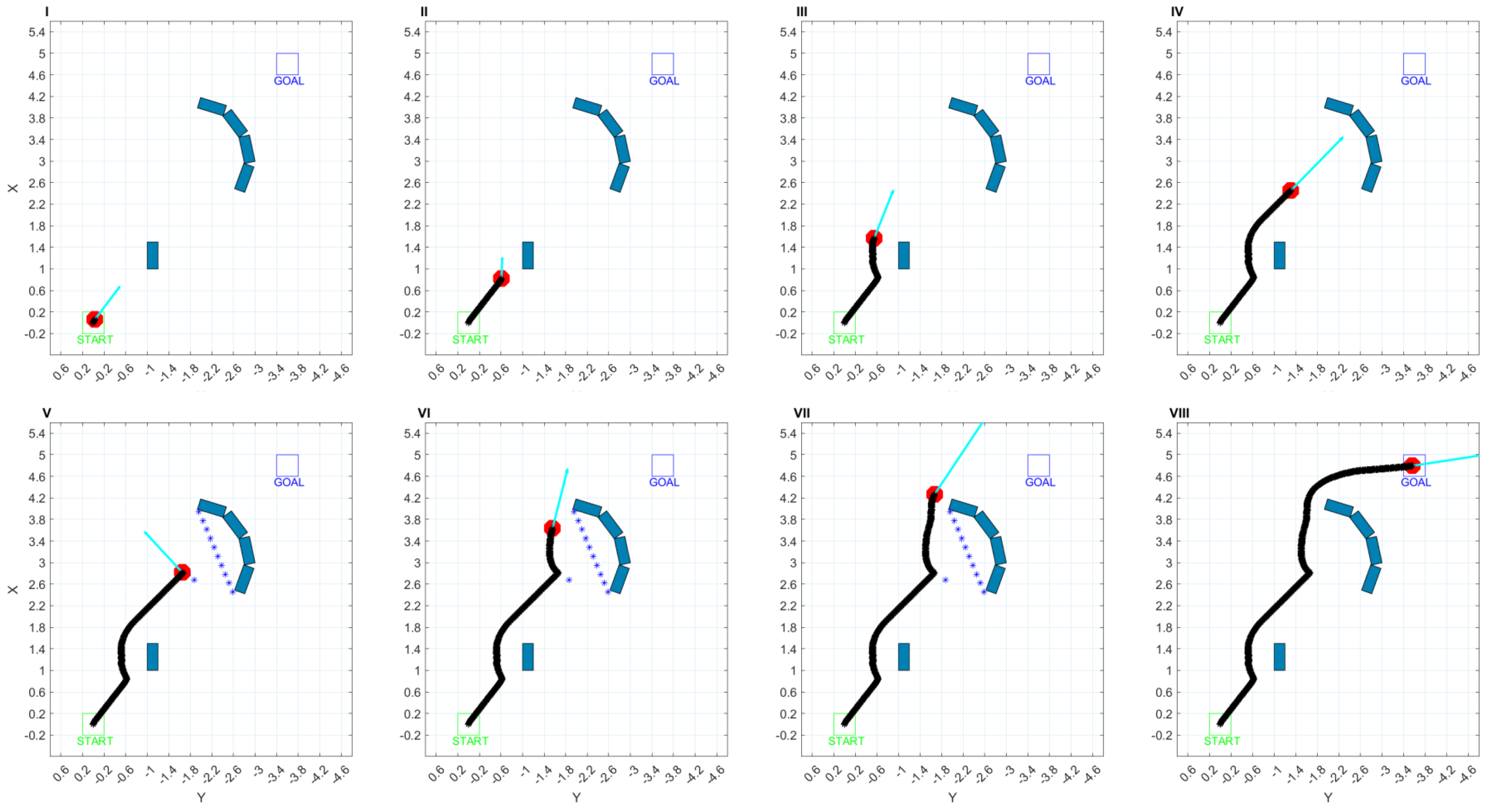
3. Proposed AR-APF Algorithm
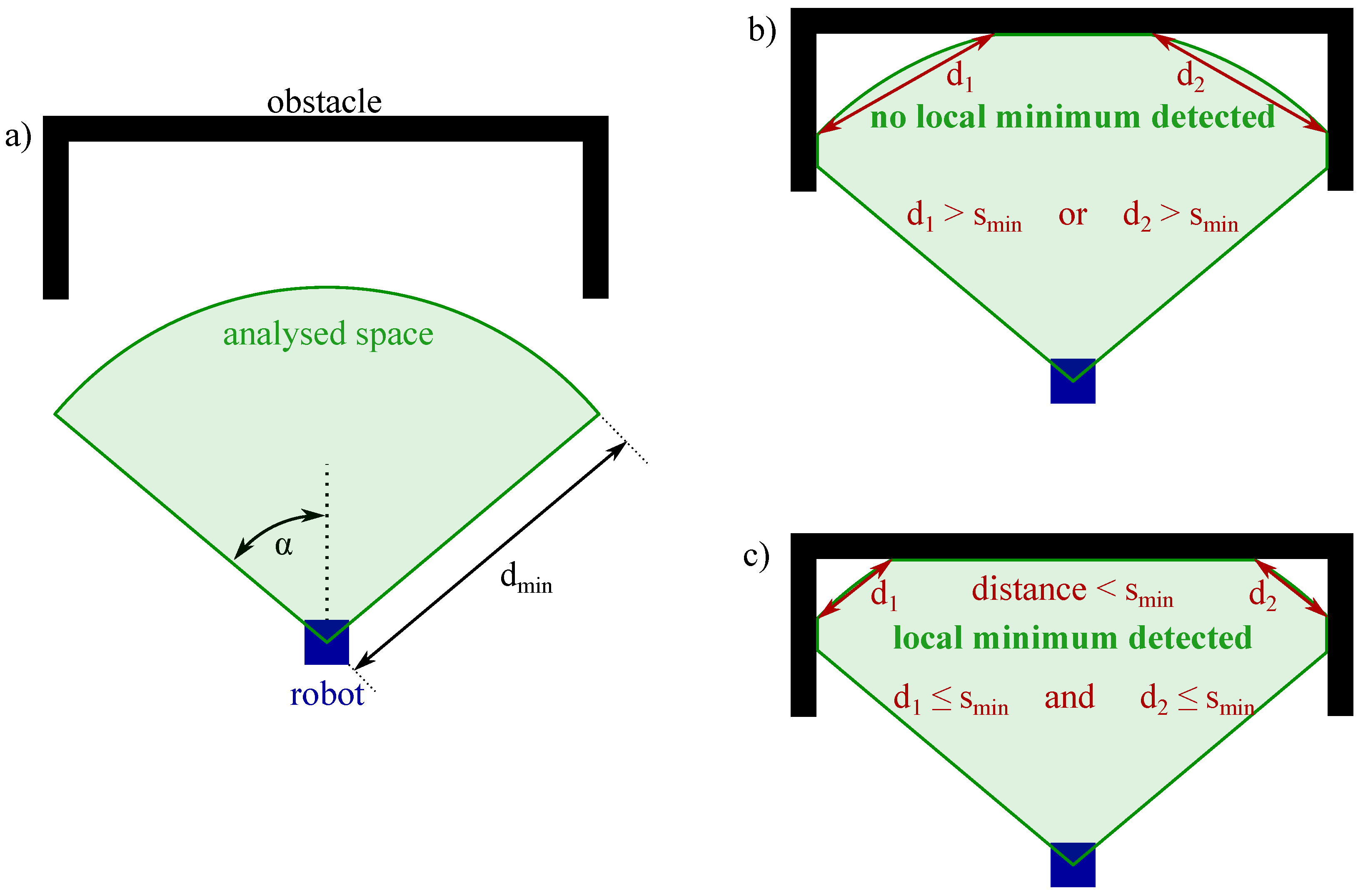
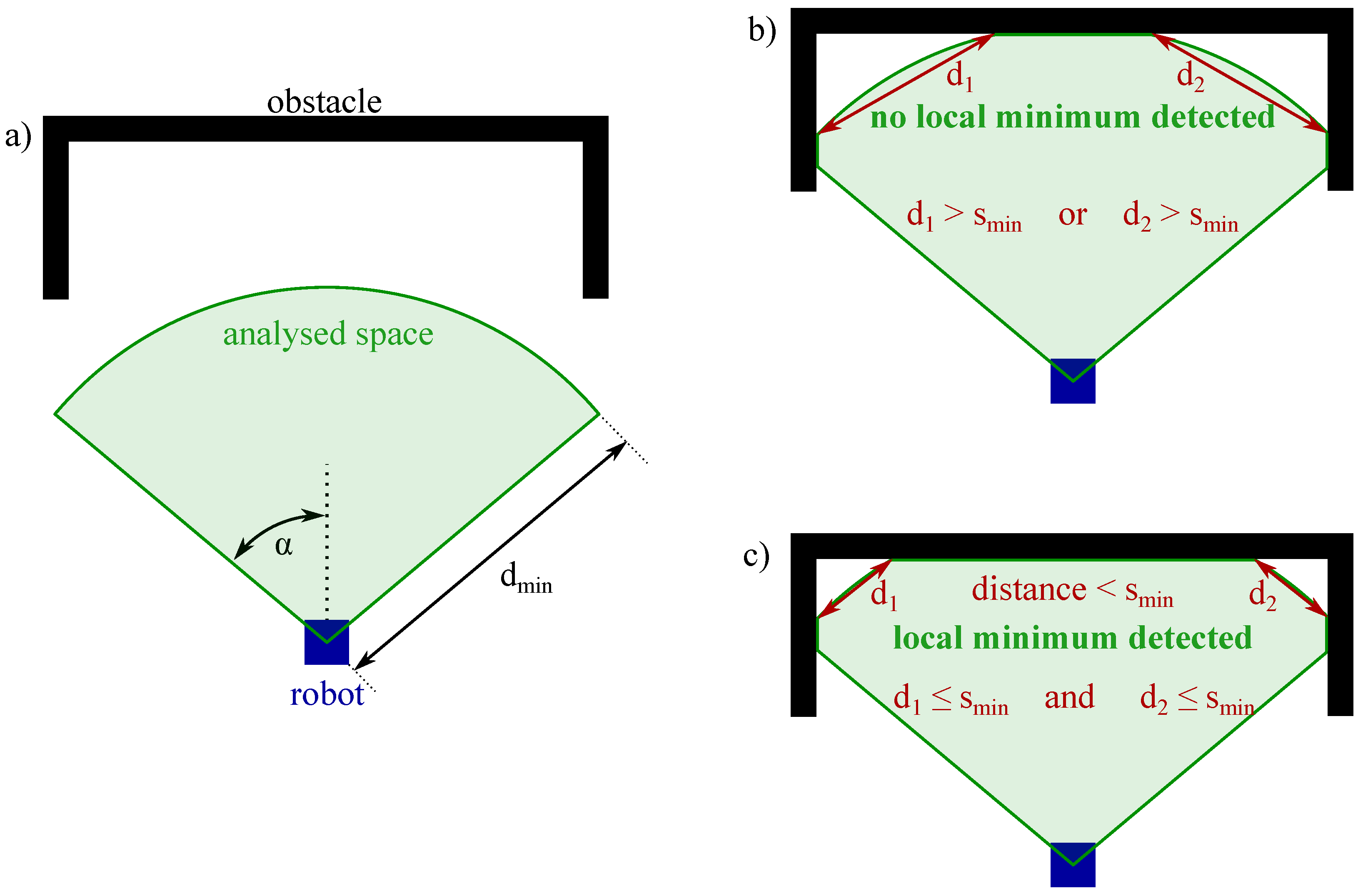
3.1. Detection of the Local Minimum
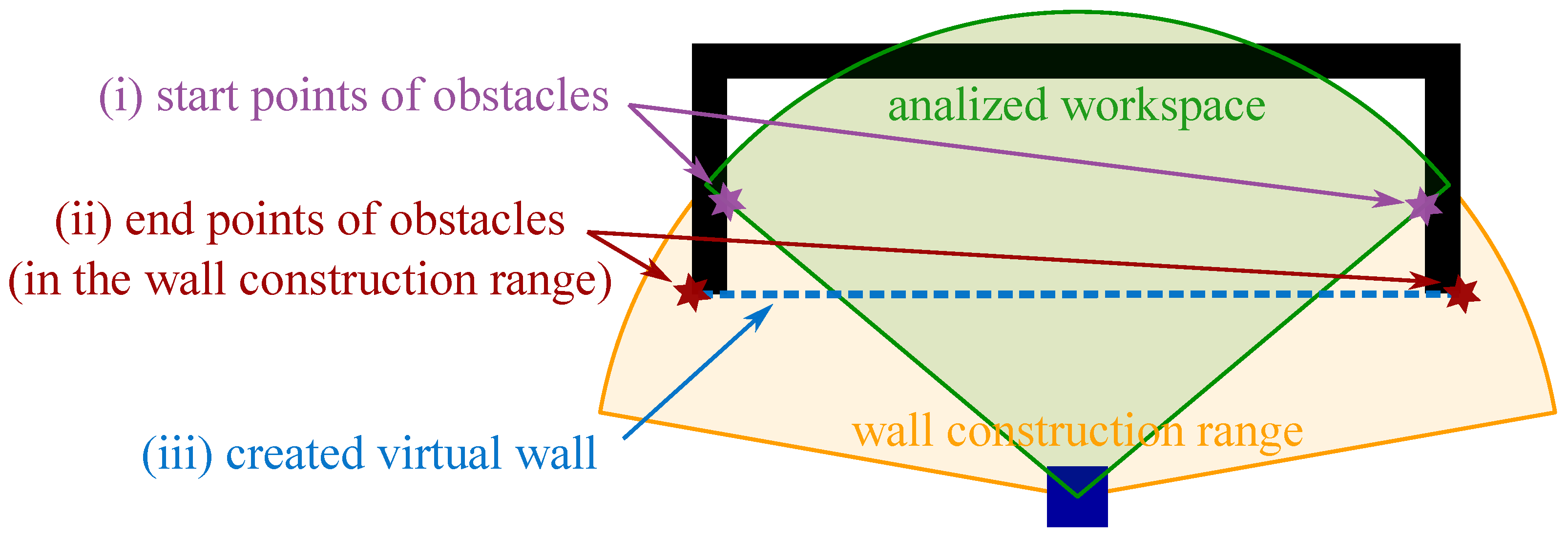
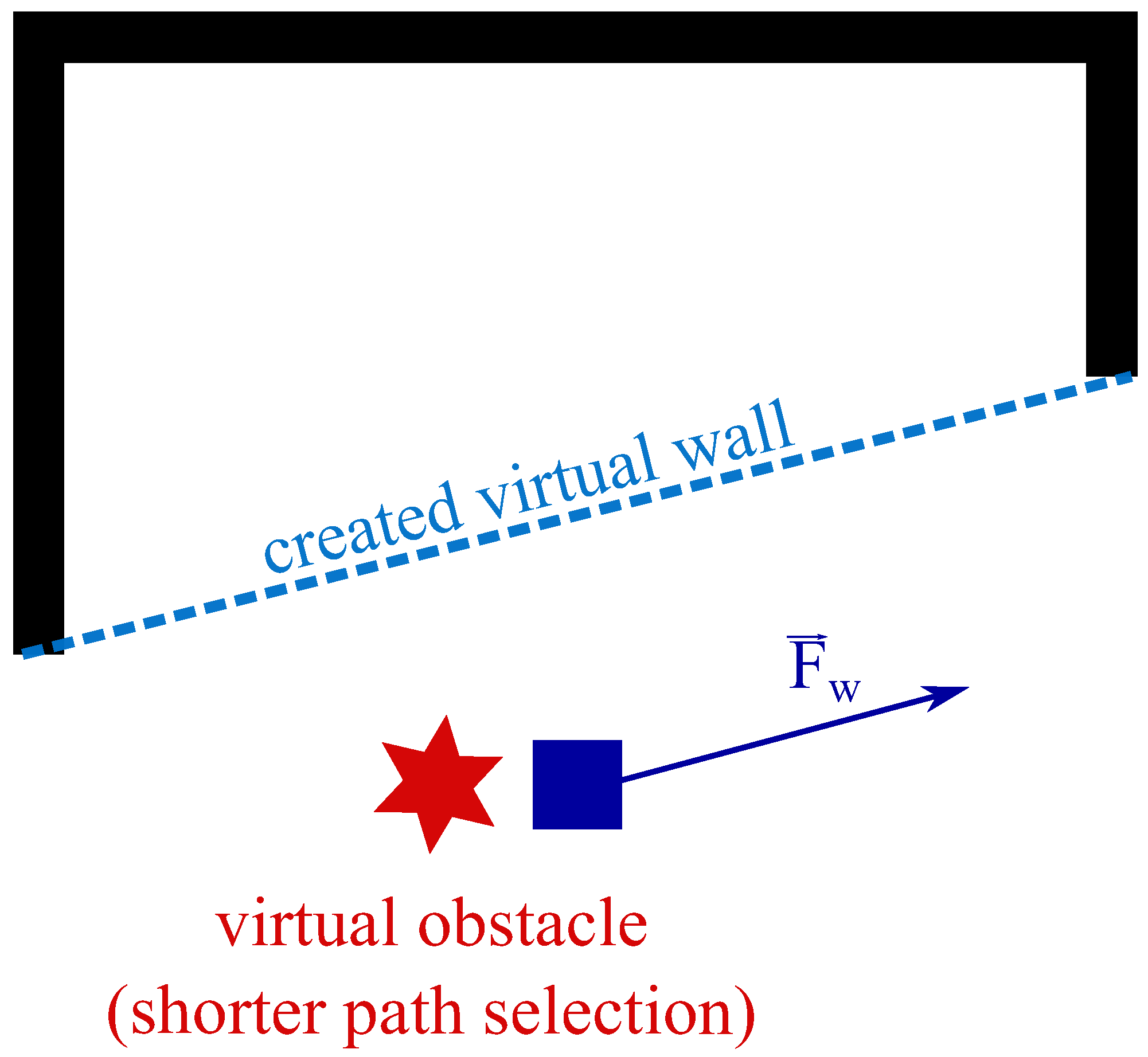
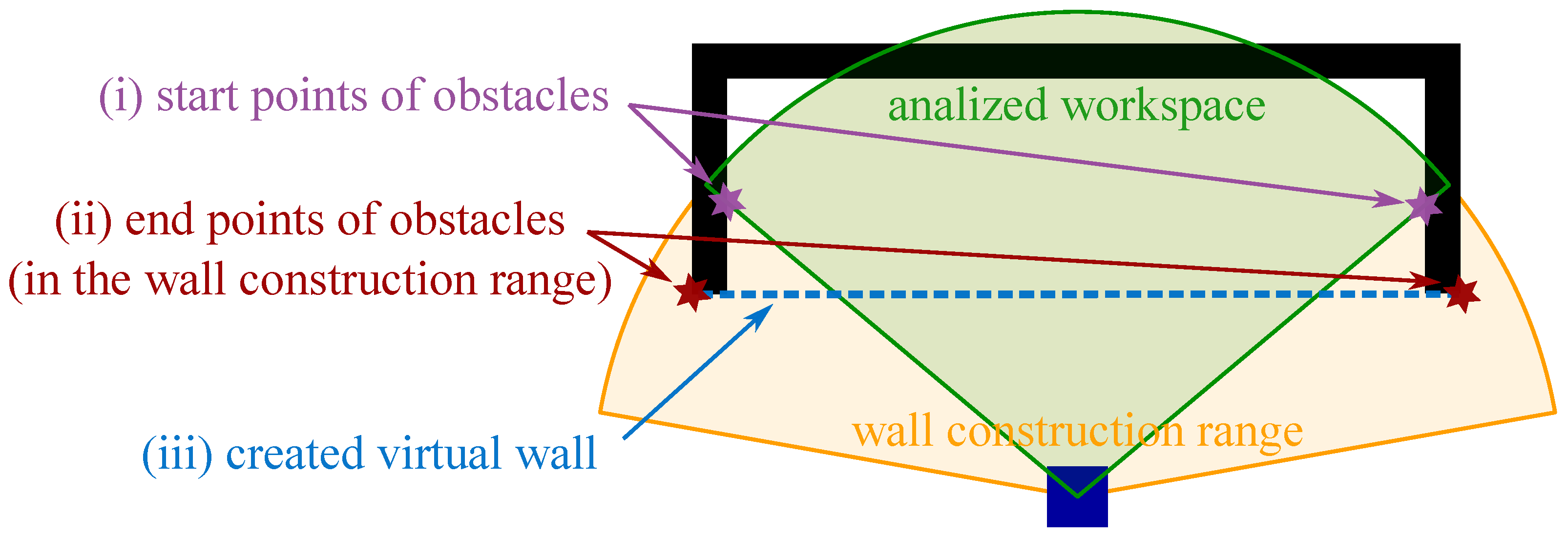
3.2. Construction of the Virtual Wall
- start with position determined by the analyzed workspace in the detection of the local minimum part (determined by and ),
- analyse the LiDAR data going out until the object ends, and
- create a wall using endpoints of the obstacles.
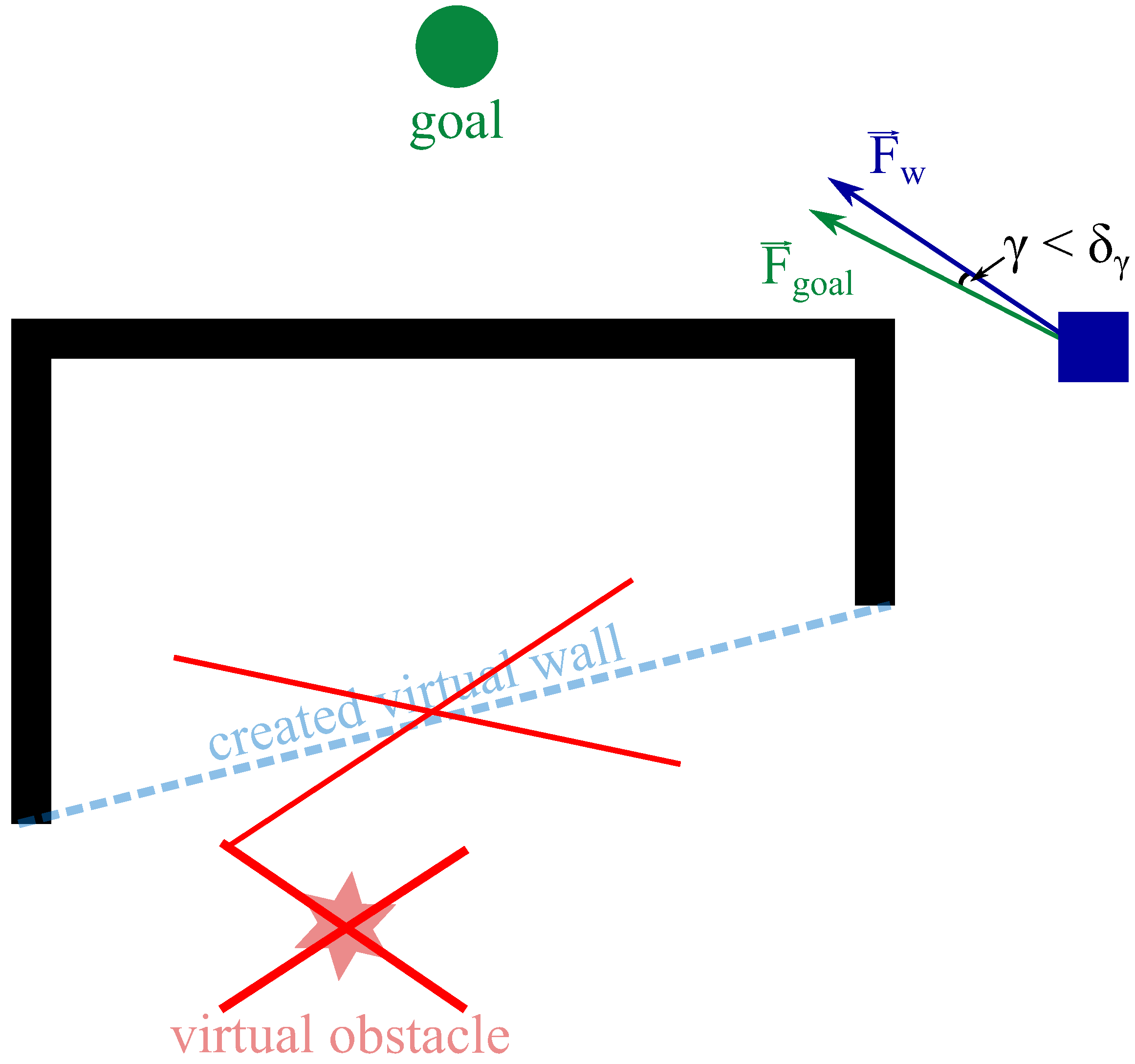
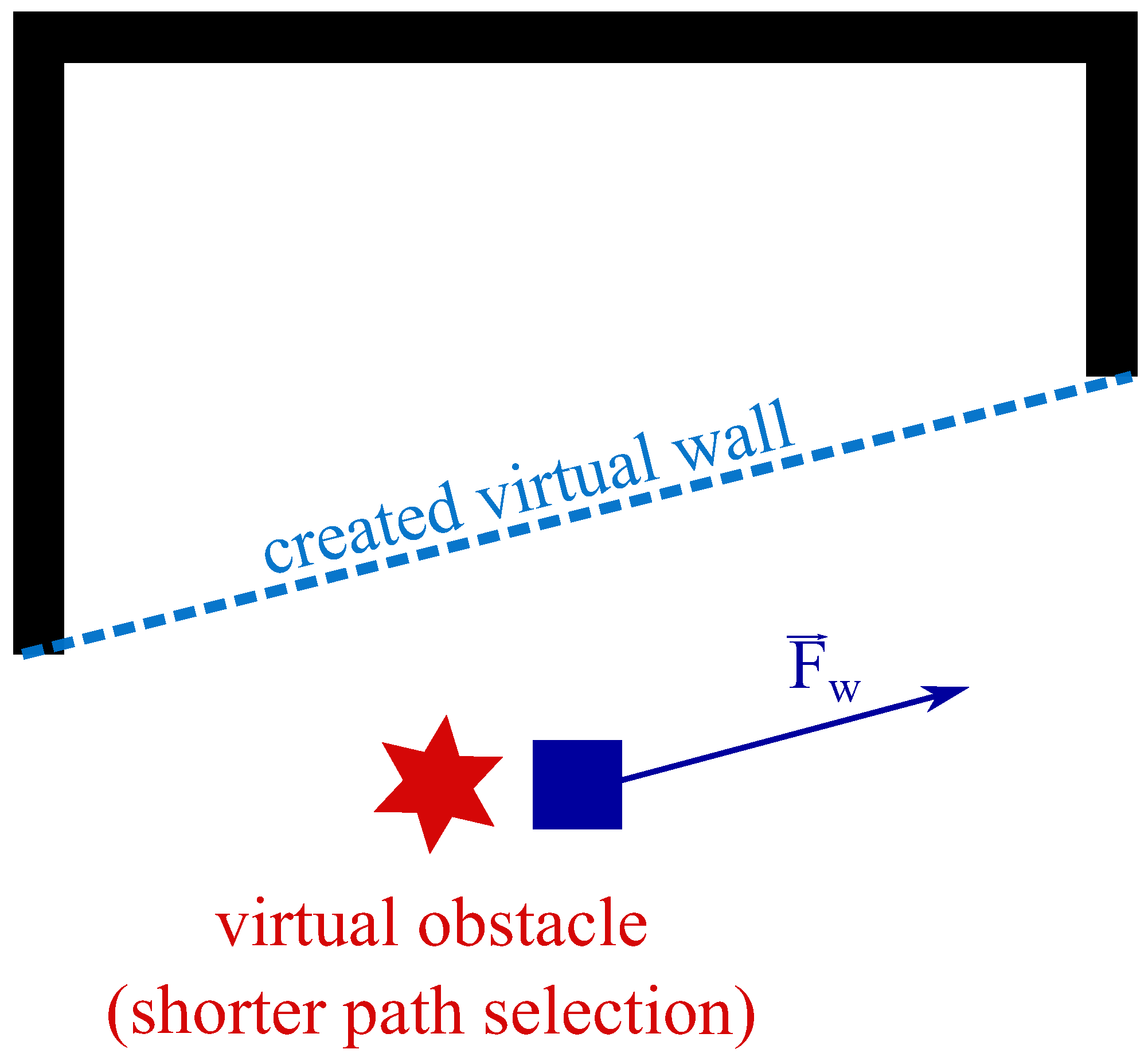
3.3. Naive Shorter Path Selection
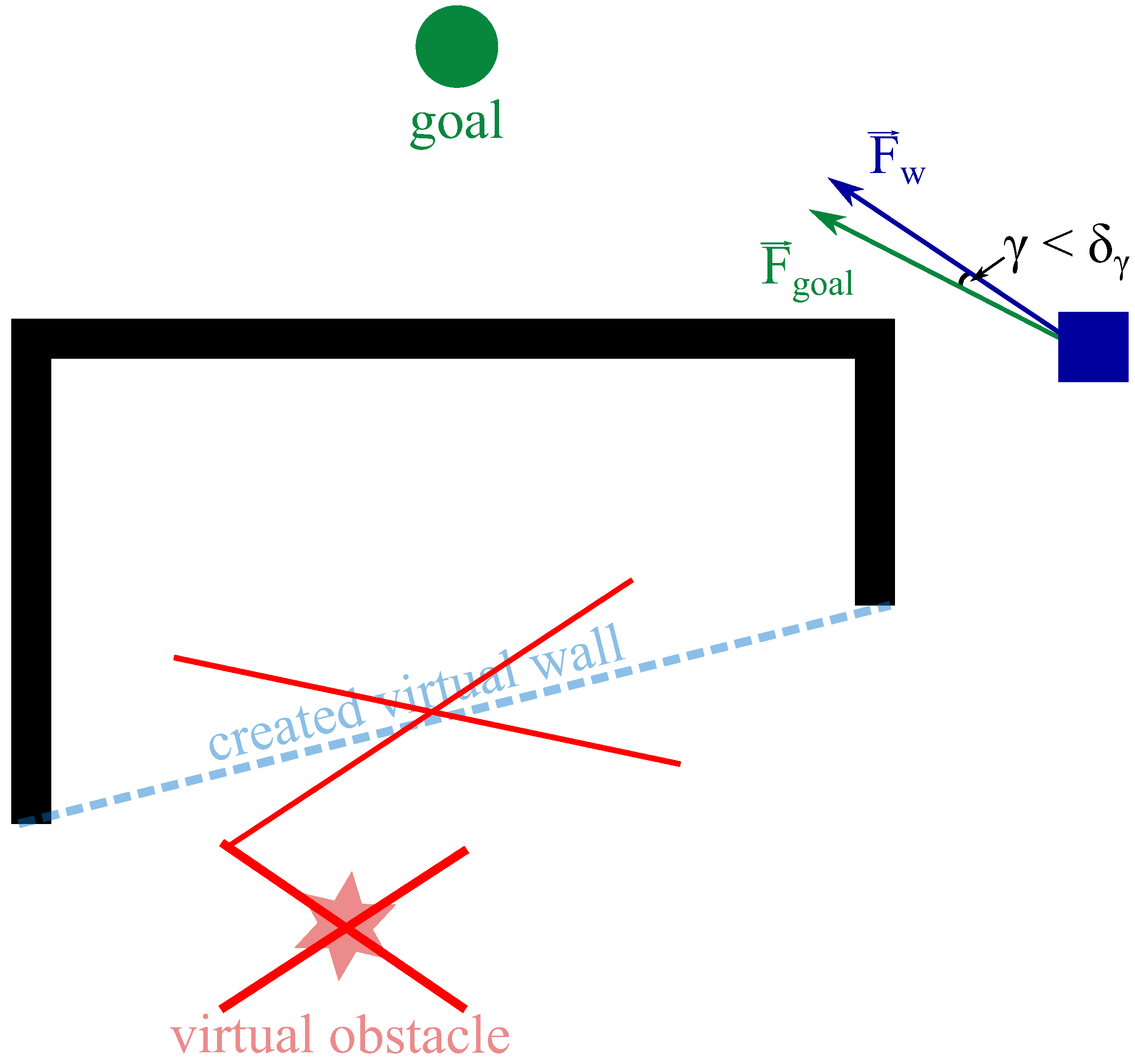
3.4. Abandonment of Augmented Reality
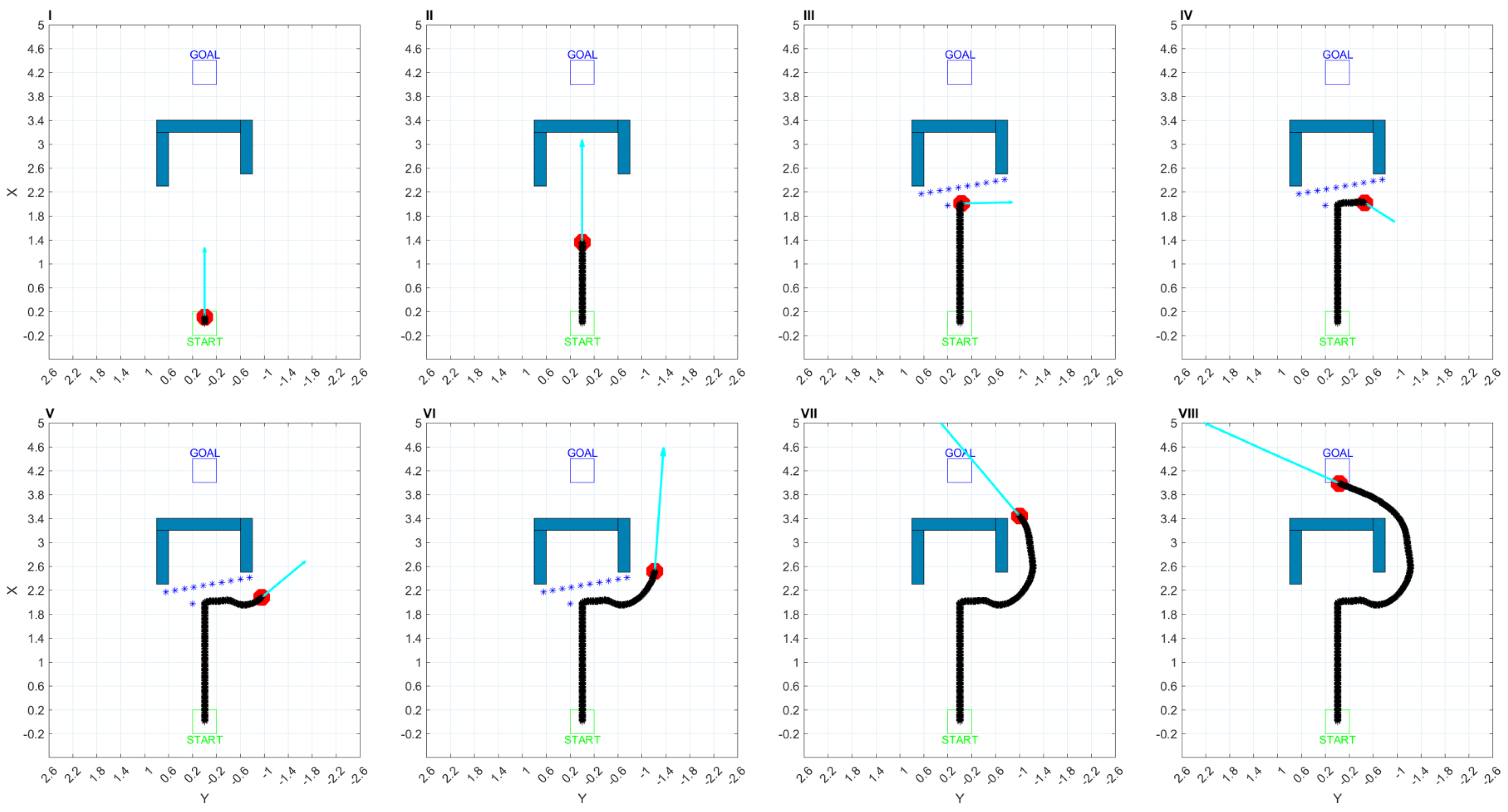
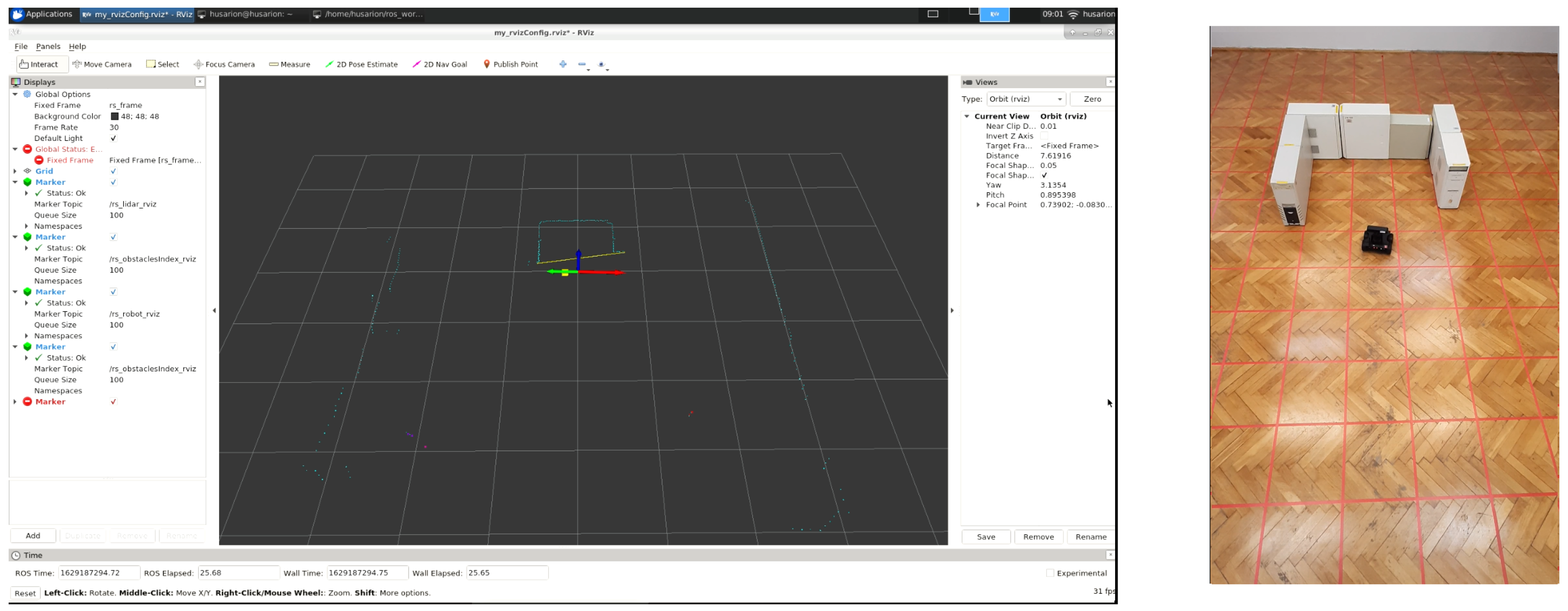
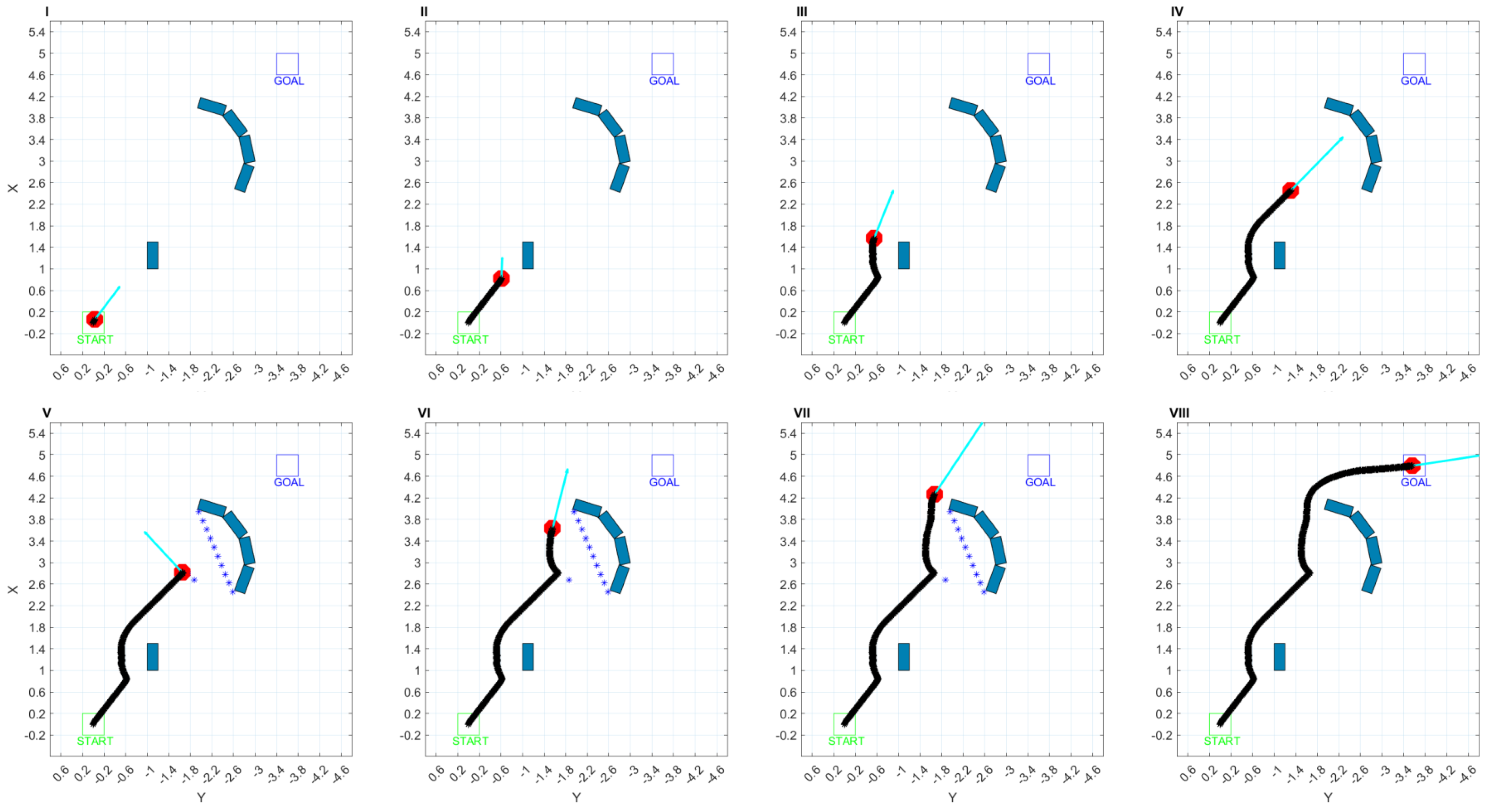
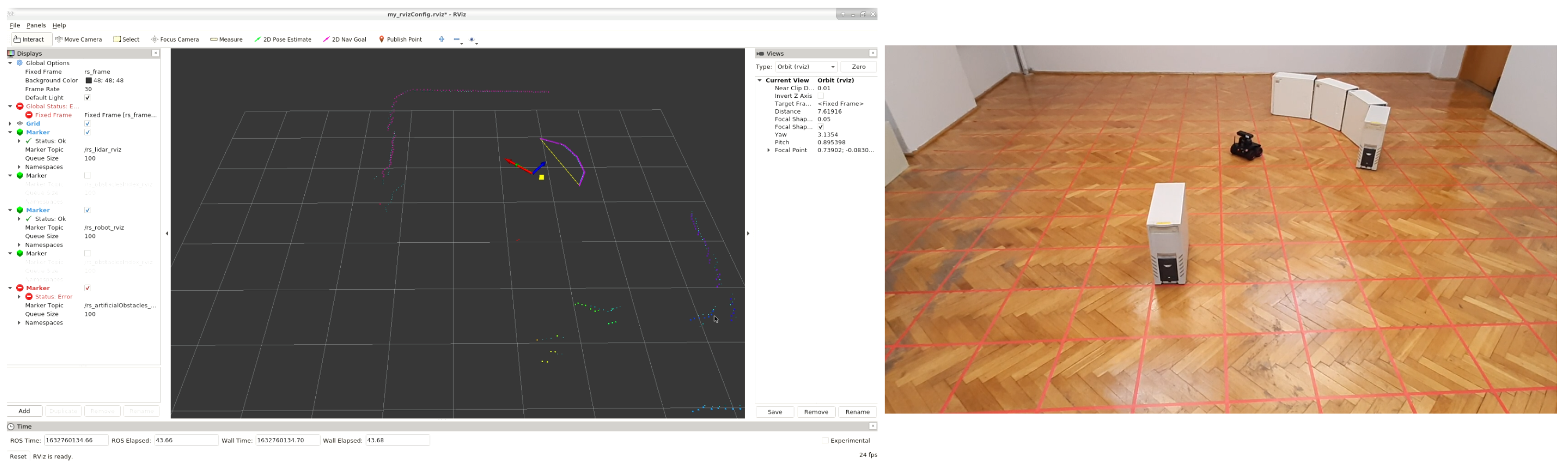
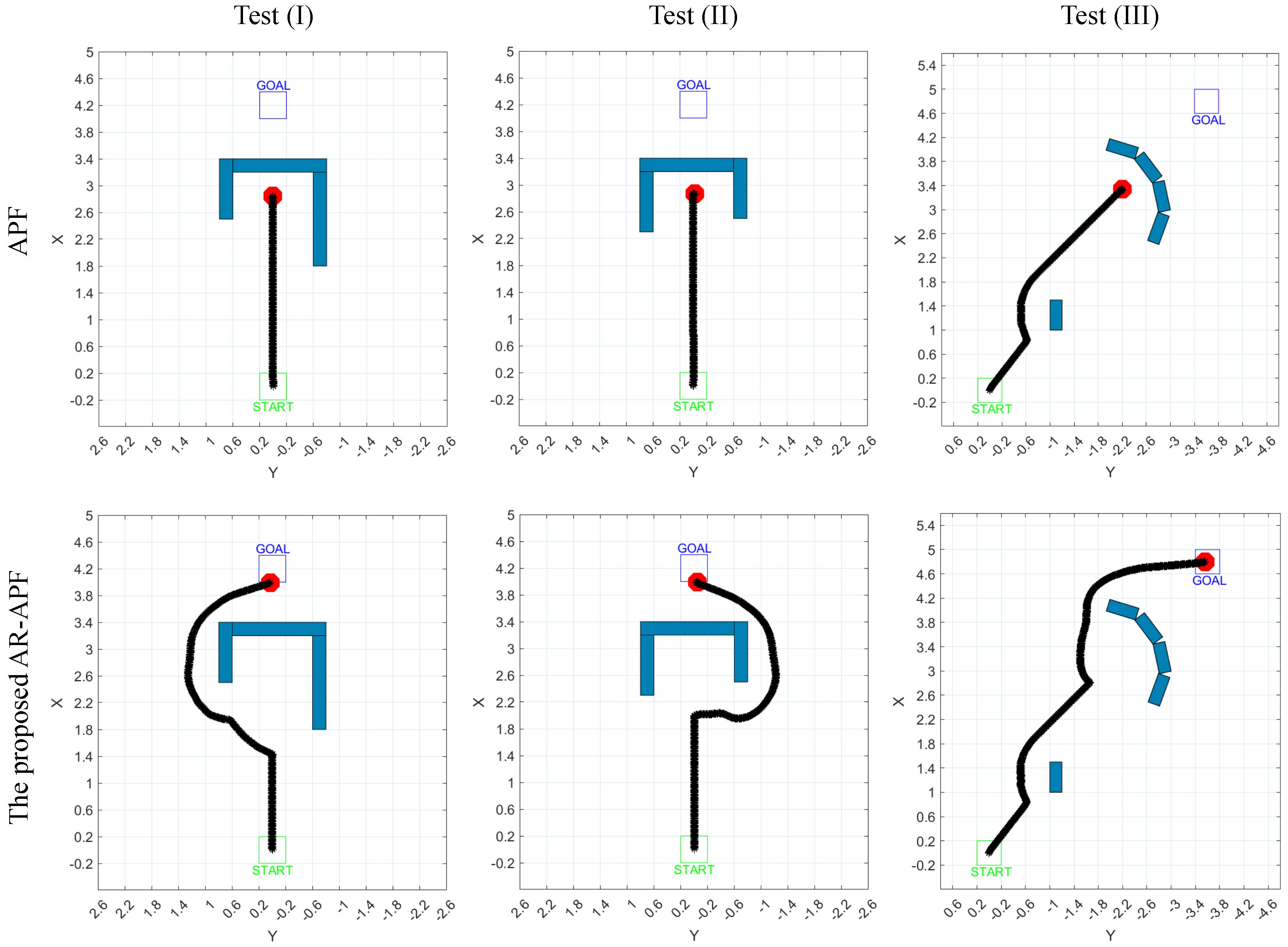
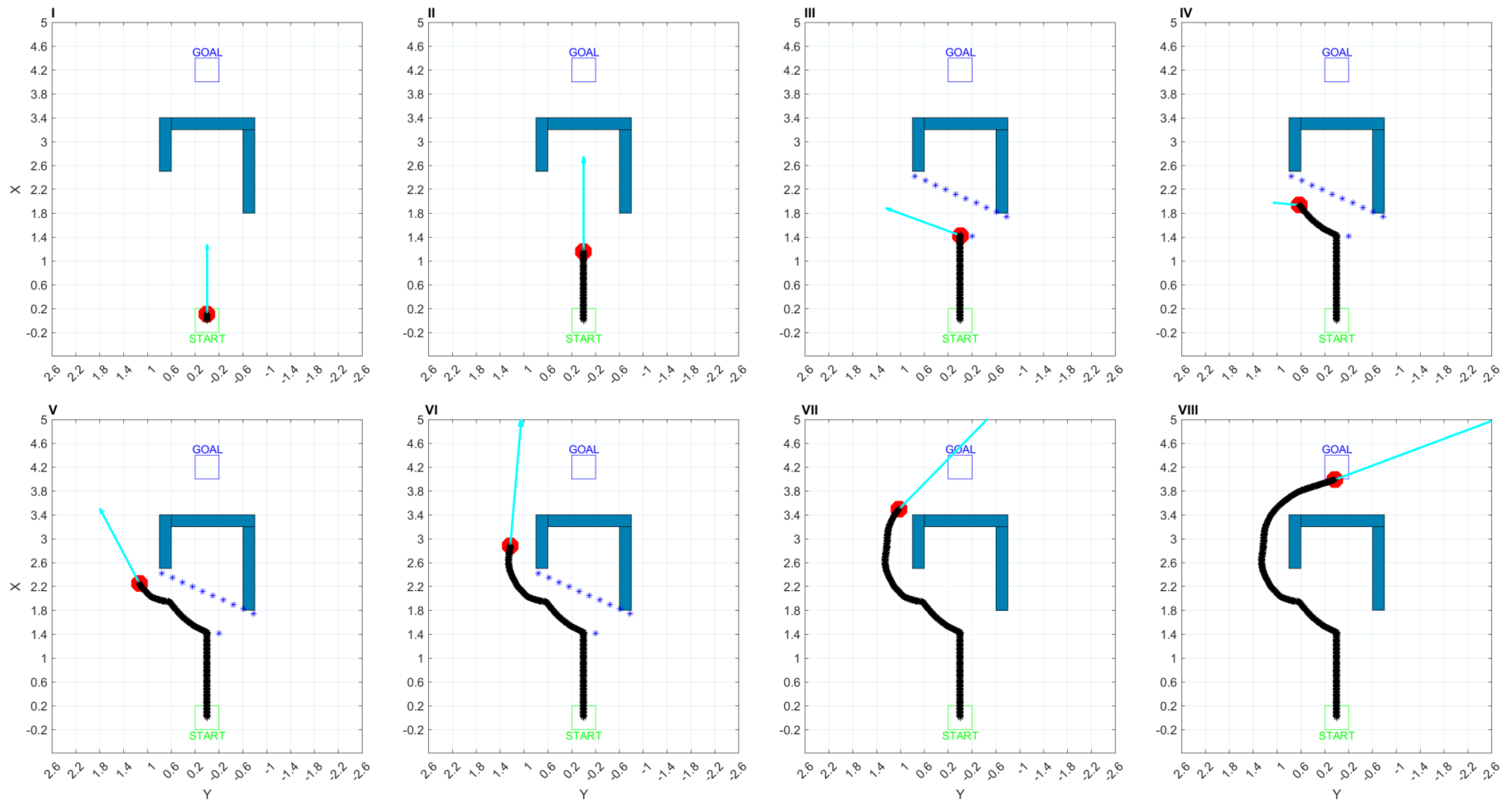
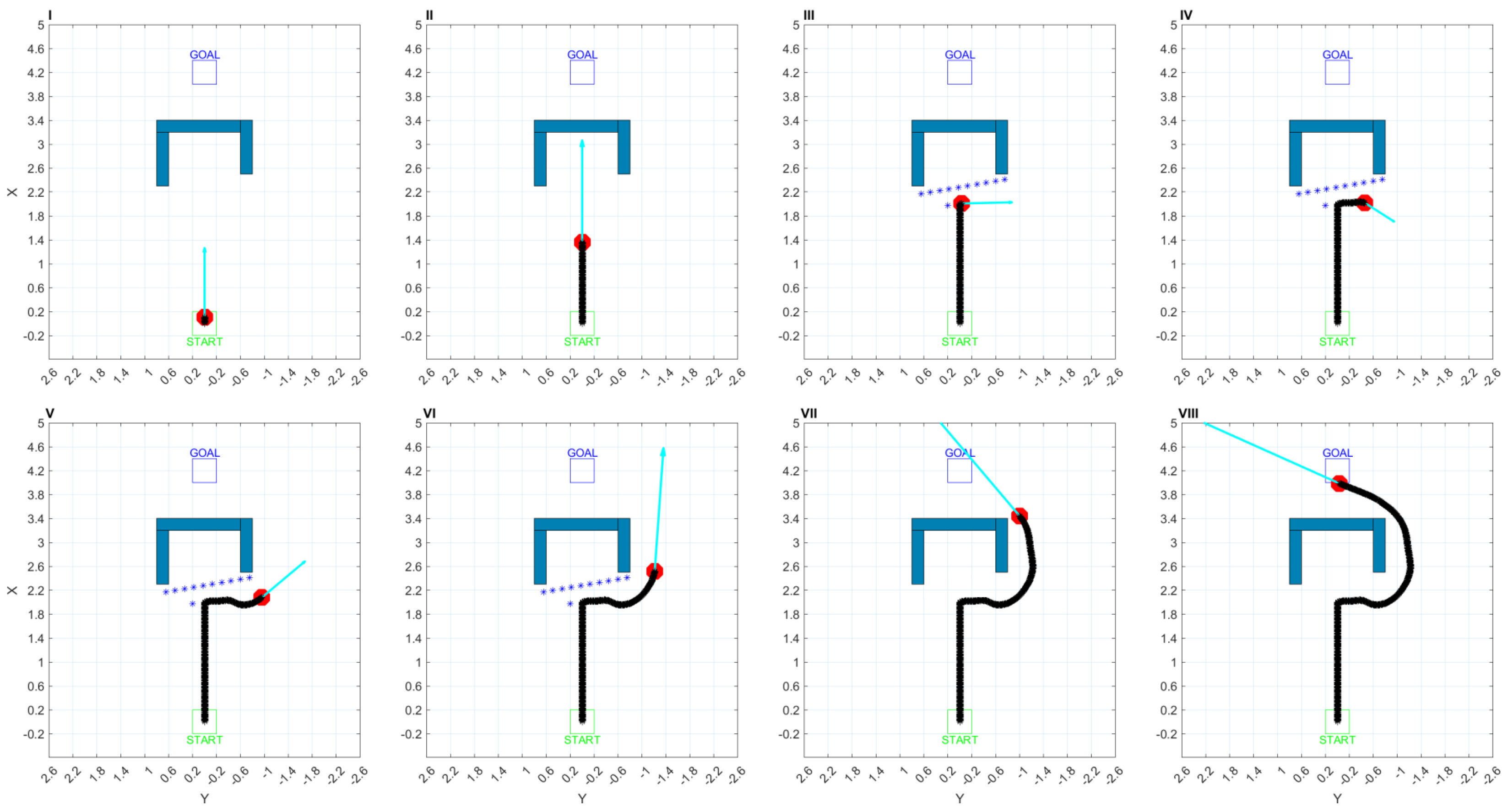
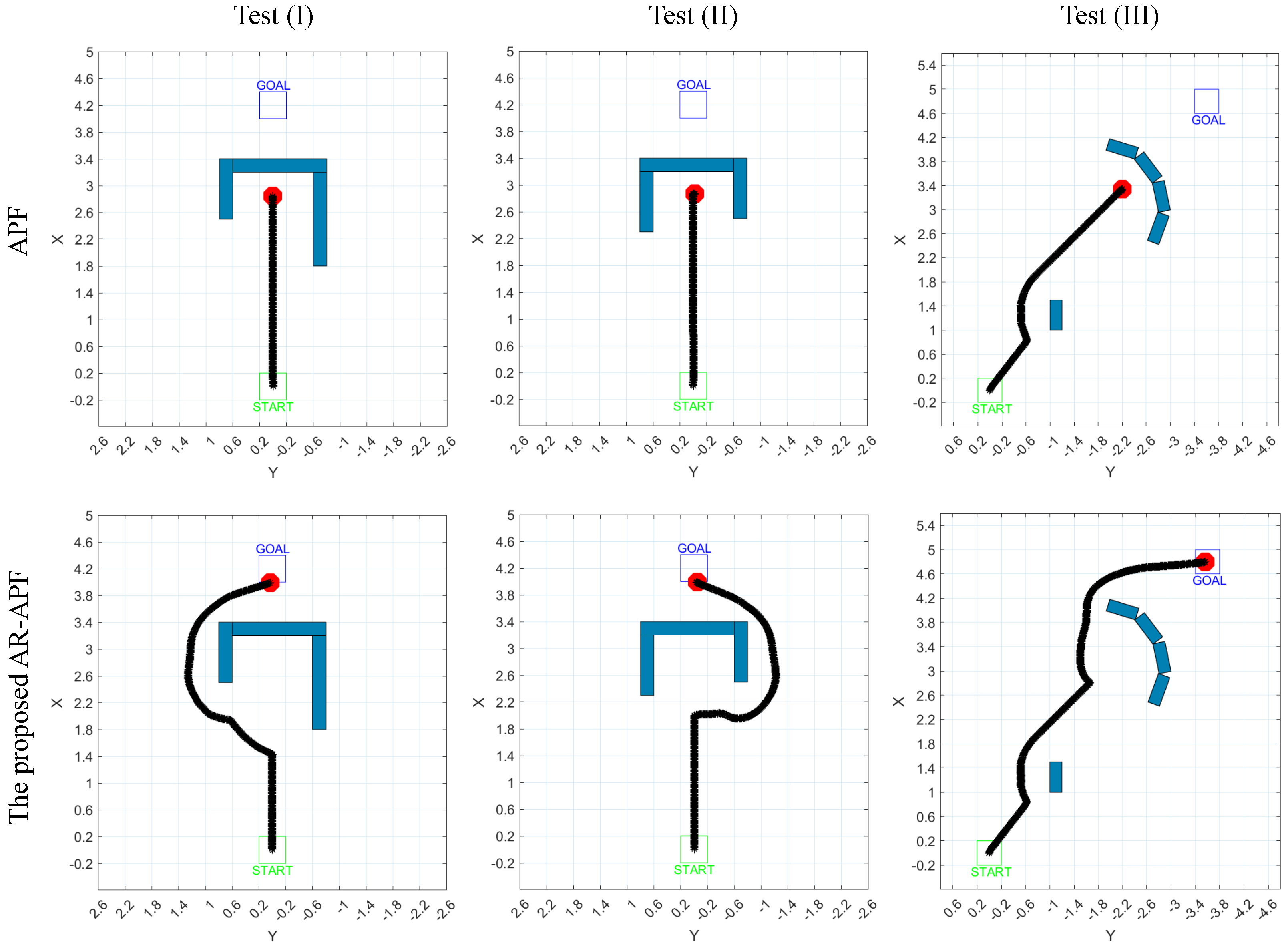
4. Results
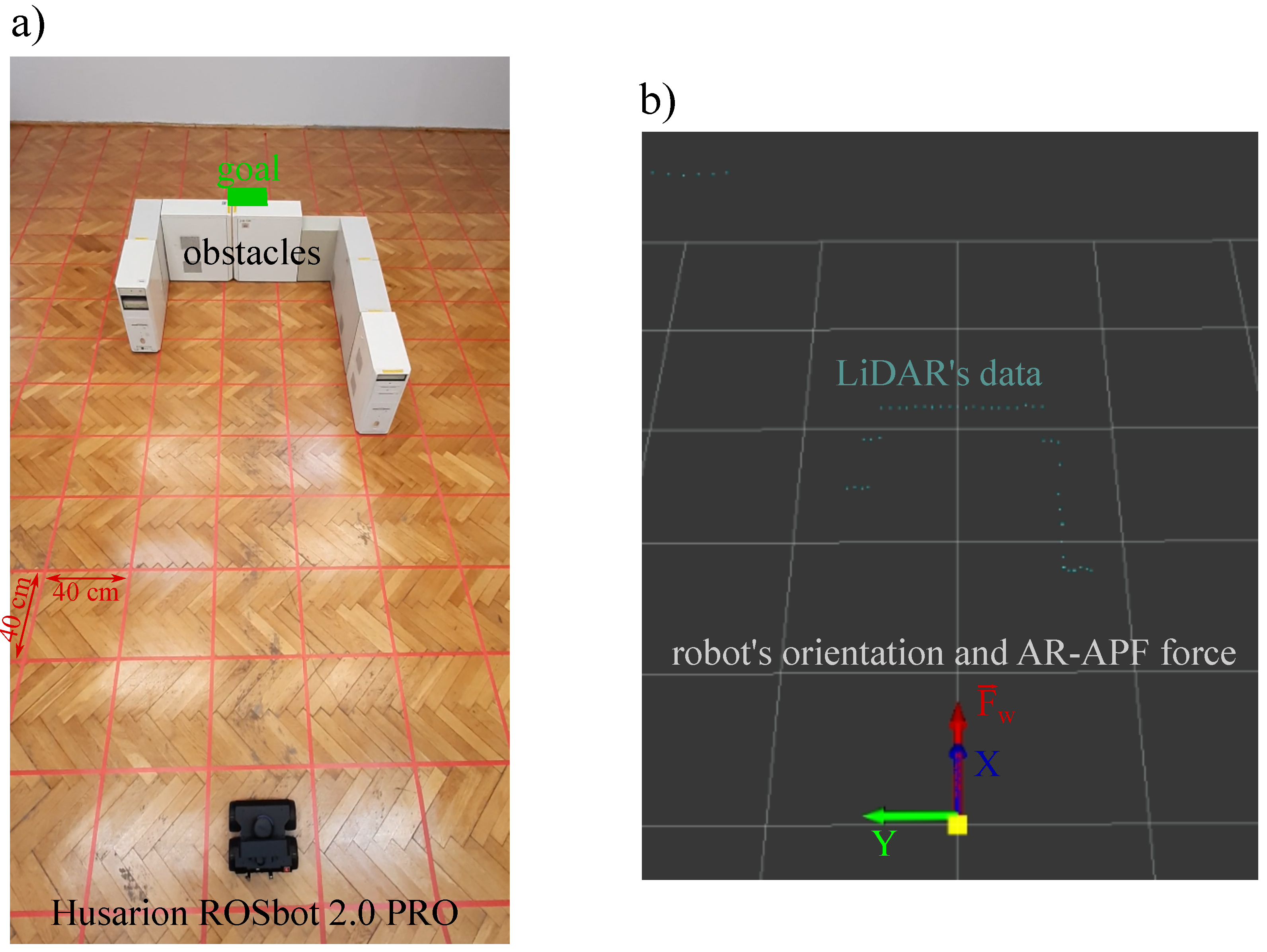
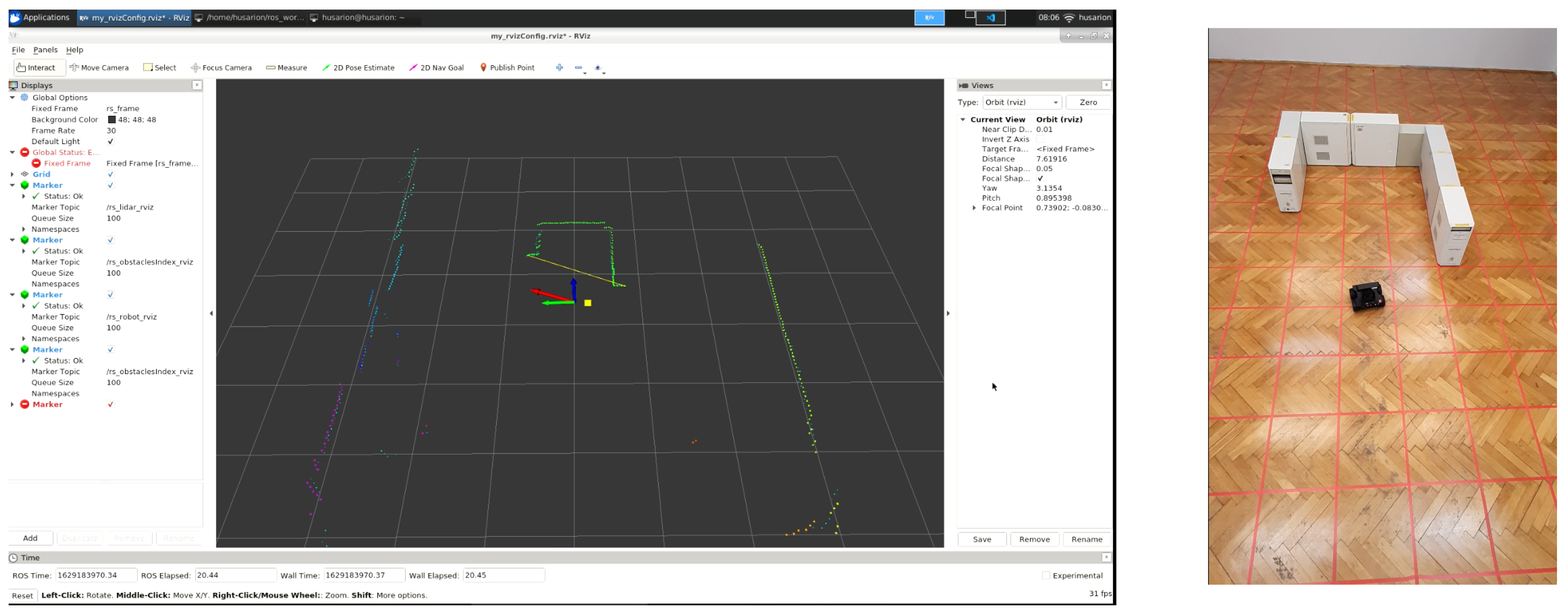
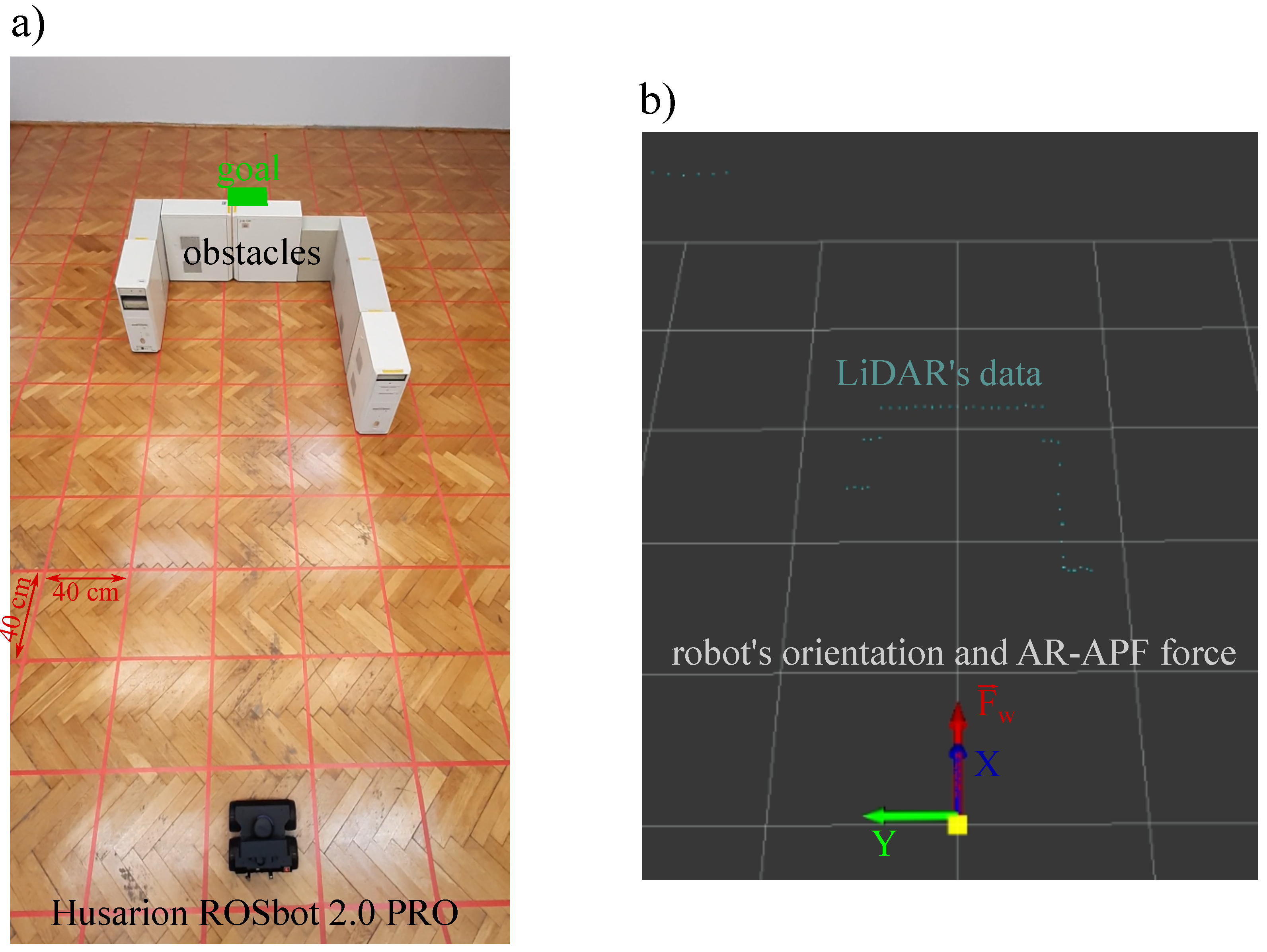
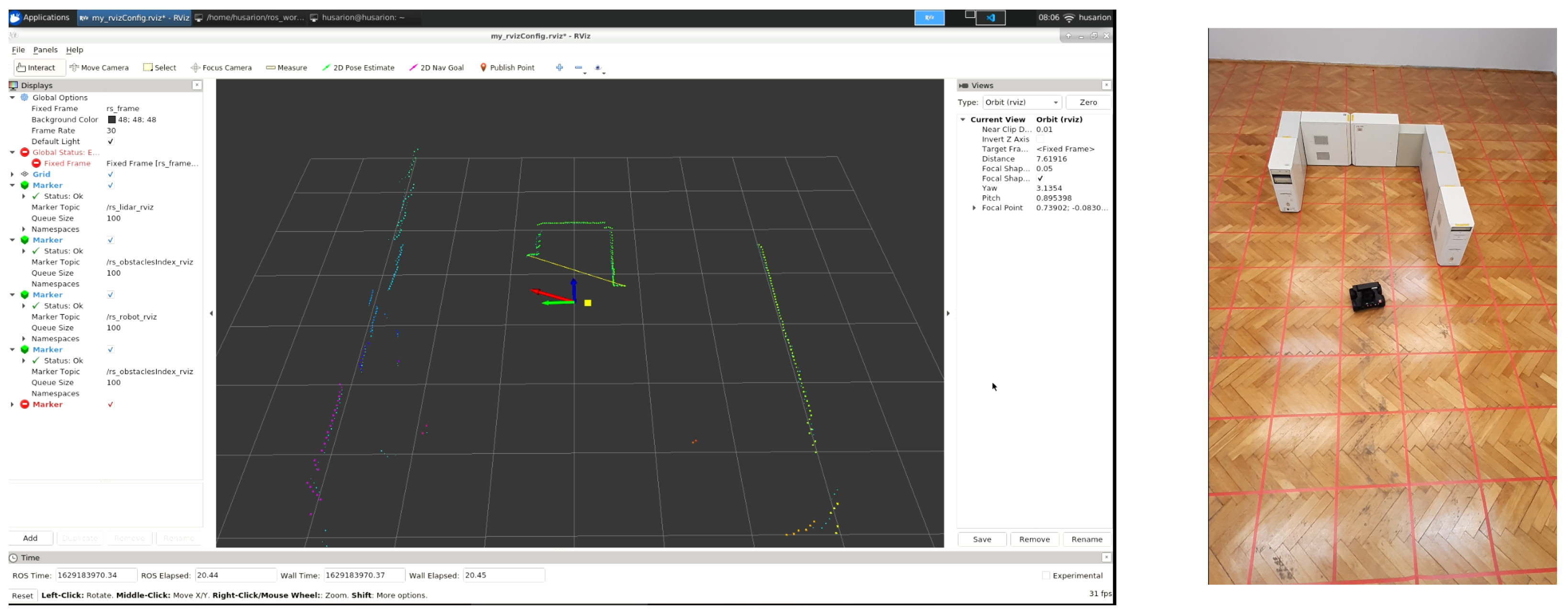
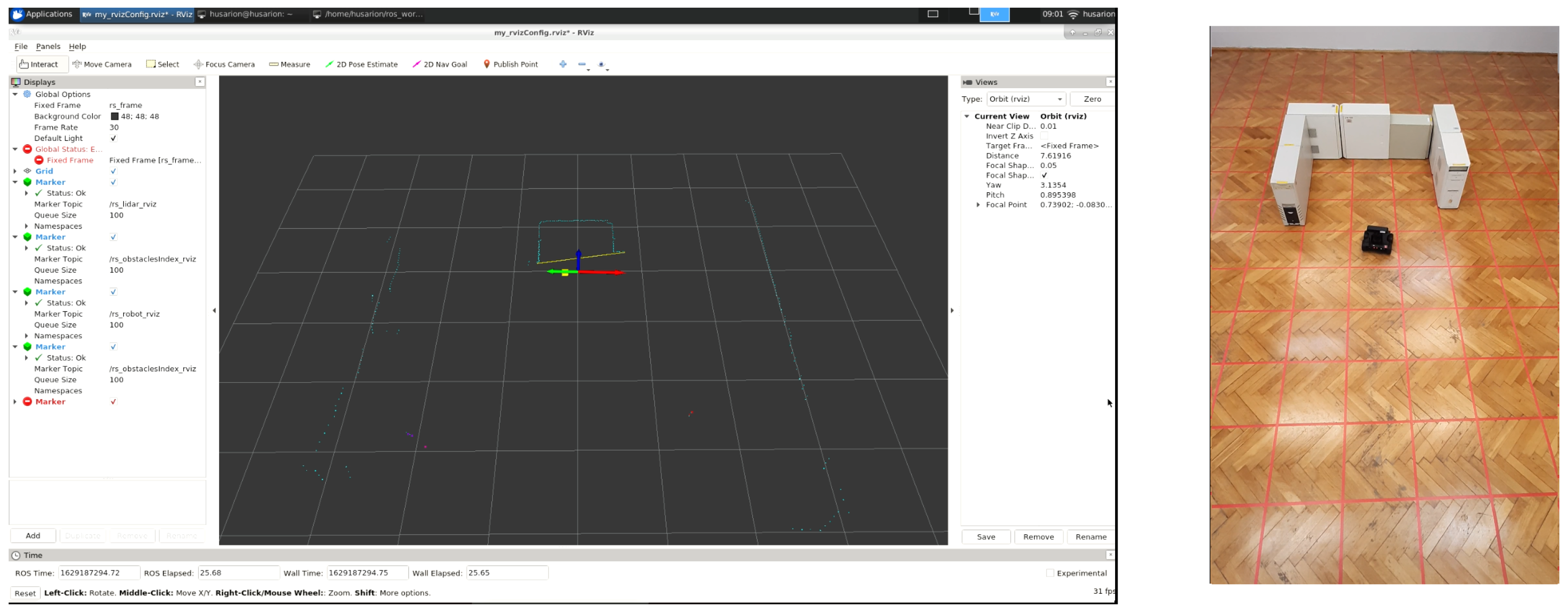
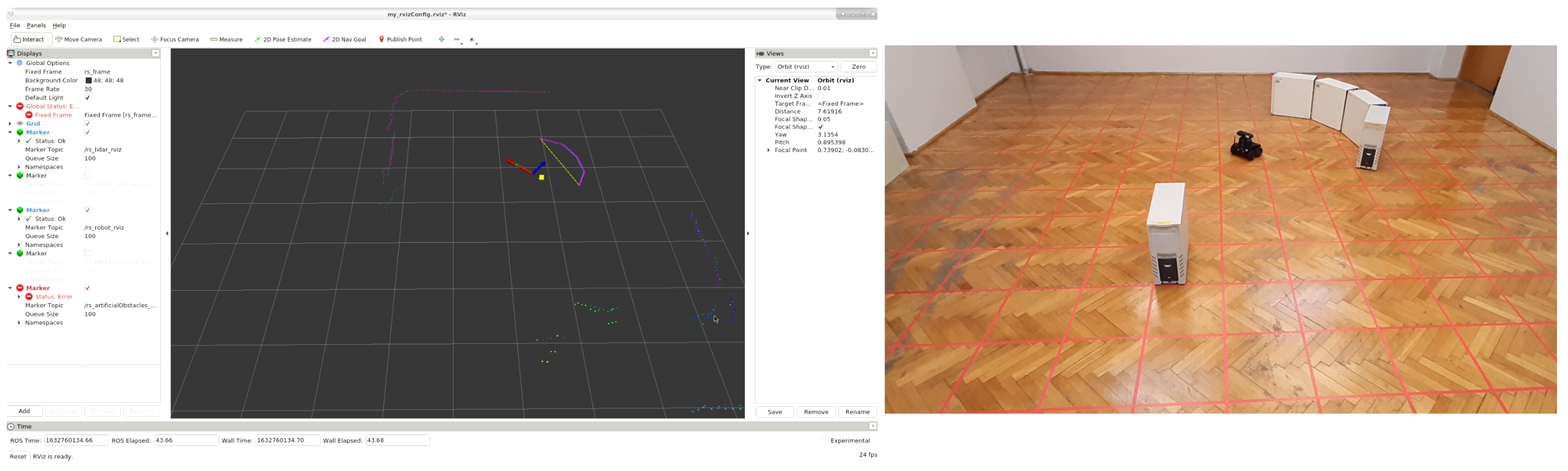
4.1. Experimental Examinations
4.1.1. Test (I)
4.1.2. Test (II)
4.1.3. Test (III)
4.1.4. Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Diourté, A.; Bugarin, F.; Bordreuil, C.; Segonds, S. Continuous three-dimensional path planning (CTPP) for complex thin parts with wire arc additive manufacturing. Addit. Manuf. 2021, 37, 101622. [Google Scholar]
- Gul, F.; Mir, I.; Abualigah, L.; Sumari, P.; Forestiero, A. A Consolidated Review of Path Planning and Optimization Techniques: Technical Perspectives and Future Directions. Electronics 2021, 10, 2250. [Google Scholar] [CrossRef]
- Kumar, N.V.; Kumar, C.S. Development of collision free path planning algorithm for warehouse mobile robot. Procedia Comput. Sci. 2018, 133, 456–463. [Google Scholar] [CrossRef]
- Gul, F.; Rahiman, W.; Nazli Alhady, S.S. A comprehensive study for robot navigation techniques. Cogent Eng. 2019, 6, 1632046. [Google Scholar] [CrossRef]
- Hermand, E.; Nguyen, T.W.; Hosseinzadeh, M.; Garone, E. Constrained control of UAVs in geofencing applications. In Proceedings of the 2018 26th Mediterranean Conference on Control and Automation (MED), Zadar, Croatia, 19–22 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 217–222. [Google Scholar]
- Szczepanski, R.; Tarczewski, T. Global path planning for mobile robot based on Artificial Bee Colony and Dijkstra’s algorithms. In Proceedings of the 2021 IEEE 19th International Power Electronics and Motion Control Conference (PEMC), Gliwice, Poland, 25–29 April 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 724–730. [Google Scholar]
- Kang, J.G.; Choi, Y.S.; Jung, J.W. A Method of Enhancing Rapidly-Exploring Random Tree Robot Path Planning Using Midpoint Interpolation. Appl. Sci. 2021, 11, 8483. [Google Scholar] [CrossRef]
- Gul, F.; Rahiman, W.; Alhady, S.N.; Ali, A.; Mir, I.; Jalil, A. Meta-heuristic approach for solving multi-objective path planning for autonomous guided robot using PSO–GWO optimization algorithm with evolutionary programming. J. Ambient. Intell. Humaniz. Comput. 2020, 12, 7873–7890. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Autonomous Robot Vehicles; Springer: Berlin/Heidelberg, Germany, 1986; pp. 396–404. [Google Scholar]
- Yao, Q.; Zheng, Z.; Qi, L.; Yuan, H.; Guo, X.; Zhao, M.; Liu, Z.; Yang, T. Path planning method with improved artificial potential field—A reinforcement learning perspective. IEEE Access 2020, 8, 135513–135523. [Google Scholar] [CrossRef]
- Fan, X.; Guo, Y.; Liu, H.; Wei, B.; Lyu, W. Improved artificial potential field method applied for AUV path planning. Math. Probl. Eng. 2020, 2020, 6523158. [Google Scholar] [CrossRef]
- Jung, J.H.; Kim, D.H. Local path planning of a mobile robot using a novel grid-based potential method. Int. J. Fuzzy Log. Intell. Syst. 2020, 20, 26–34. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, Z.; Chang, L. A new adaptive artificial potential field and rolling window method for mobile robot path planning. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 7144–7148. [Google Scholar]
- Wyrąbkiewicz, K.; Tarczewski, T.; Niewiara, Ł. Local path planning for autonomous mobile robot based on apf-bug algorithm with ground quality indicator. In Advanced, Contemporary Control; Springer: Berlin/Heidelberg, Germany, 2020; pp. 979–990. [Google Scholar]
- Du, Y.; Zhang, X.; Nie, Z. A real-time collision avoidance strategy in dynamic airspace based on dynamic artificial potential field algorithm. IEEE Access 2019, 7, 169469–169479. [Google Scholar] [CrossRef]
- Song, J.; Hao, C.; Su, J. Path planning for unmanned surface vehicle based on predictive artificial potential field. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420918461. [Google Scholar] [CrossRef] [Green Version]
- Azuma, R.; Baillot, Y.; Behringer, R.; Feiner, S.; Julier, S.; MacIntyre, B. Recent advances in augmented reality. IEEE Comput. Graph. Appl. 2001, 21, 34–47. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y.; Au, K.; Leung, Y. Comprehending products with mixed reality: Geometric relationships and creativity. Int. J. Eng. Bus. Manag. 2018, 10, 1847979018809599. [Google Scholar] [CrossRef] [Green Version]
- Makhataeva, Z.; Varol, H.A. Augmented reality for robotics: A review. Robotics 2020, 9, 21. [Google Scholar] [CrossRef] [Green Version]
- Quintero, C.P.; Li, S.; Pan, M.K.; Chan, W.P.; Van der Loos, H.M.; Croft, E. Robot programming through augmented trajectories in augmented reality. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1838–1844. [Google Scholar]
- Hutton, C.; Sohre, N.; Davis, B.; Guy, S.; Rosenberg, E.S. An augmented reality motion planning interface for robotics. In Proceedings of the 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Osaka, Japan, 23–27 March 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1313–1314. [Google Scholar]
- Wang, X.V.; Wang, L. Augmented reality enabled human–robot collaboration. In Advanced Human-Robot Collaboration in Manufacturing; Springer: Berlin/Heidelberg, Germany, 2021; pp. 395–411. [Google Scholar]
- Husarion Company. ROSbot 2.0 PRO. Available online: https://store.husarion.com/products/rosbot-pro (accessed on 14 September 2021).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| LiDAR data points (L) | 300 |
| , , , | |
| 1 | |
| 5 | |
| , | |
| 30 deg | |
| m | |
| m | |
| m | |
| 10 | |
| 75 deg | |
| 5 deg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szczepanski, R.; Bereit, A.; Tarczewski, T. Efficient Local Path Planning Algorithm Using Artificial Potential Field Supported by Augmented Reality. Energies 2021, 14, 6642. https://doi.org/10.3390/en14206642
Szczepanski R, Bereit A, Tarczewski T. Efficient Local Path Planning Algorithm Using Artificial Potential Field Supported by Augmented Reality. Energies. 2021; 14(20):6642. https://doi.org/10.3390/en14206642
Chicago/Turabian StyleSzczepanski, Rafal, Artur Bereit, and Tomasz Tarczewski. 2021. "Efficient Local Path Planning Algorithm Using Artificial Potential Field Supported by Augmented Reality" Energies 14, no. 20: 6642. https://doi.org/10.3390/en14206642
APA StyleSzczepanski, R., Bereit, A., & Tarczewski, T. (2021). Efficient Local Path Planning Algorithm Using Artificial Potential Field Supported by Augmented Reality. Energies, 14(20), 6642. https://doi.org/10.3390/en14206642