
Power System Stabilizer as a Part of a Generator MPC Adaptive Predictive Control System




Abstract
1. Introduction
1.1. Power Generation Problem at Large
- replacing the capacity of withdrawn sources in the power system,
- taking over the role of sources working as a base load power plant,
- covering the expected increase in demand, and
- consistent reduction in the energy sector of the impact on the environment.
1.2. Generator-Related Control Problem
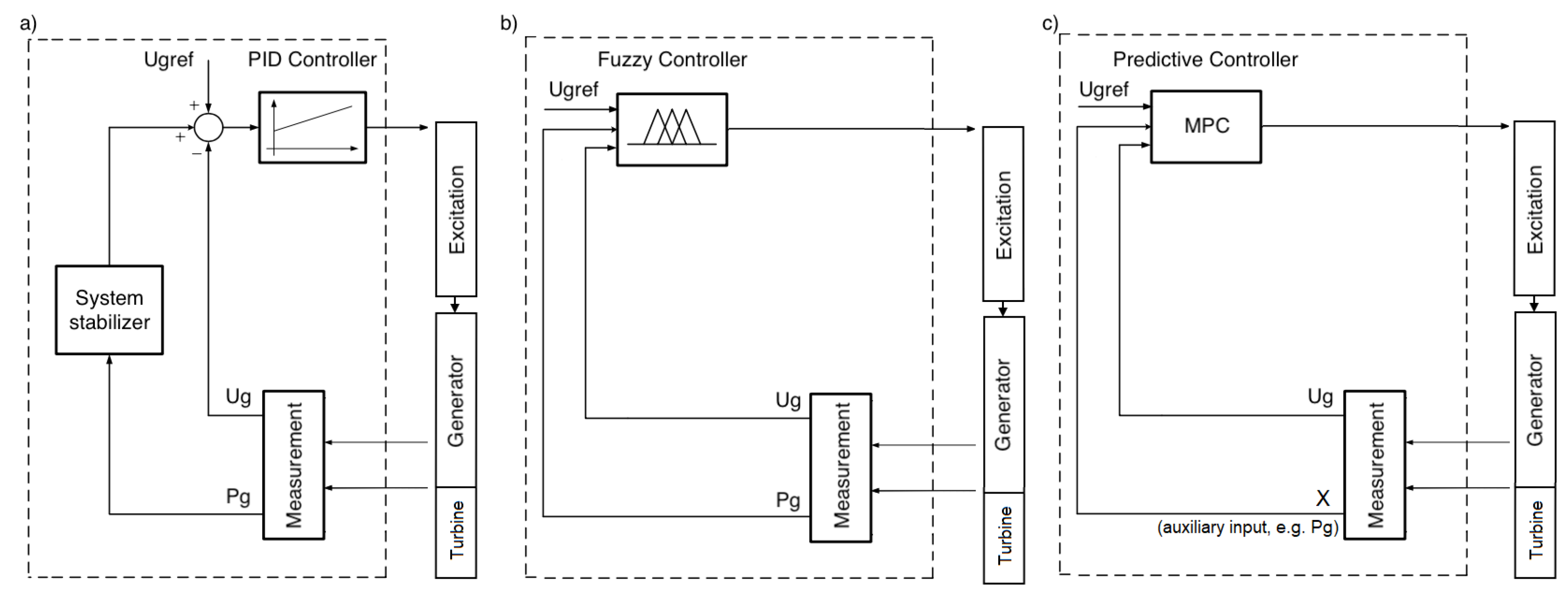
1.3. Existing Methods to Control Generators
1.4. Motivation
1.5. The Proposed Solution
1.6. Contribution and Structure of the Paper
- adding adaptation features to a continuous monitoring framework,
- MPC approach to obtain optimal interplay between actions exerted on a plant and on a generator due to the introduction of the auxiliary signal, to minimize oscillations in the system, and
- detailed analysis of the behavior of the generator controller and an additional system stabilizer module proposed as a single model predictive controller with an additional input.
2. Problem Description
3. Model & Methods
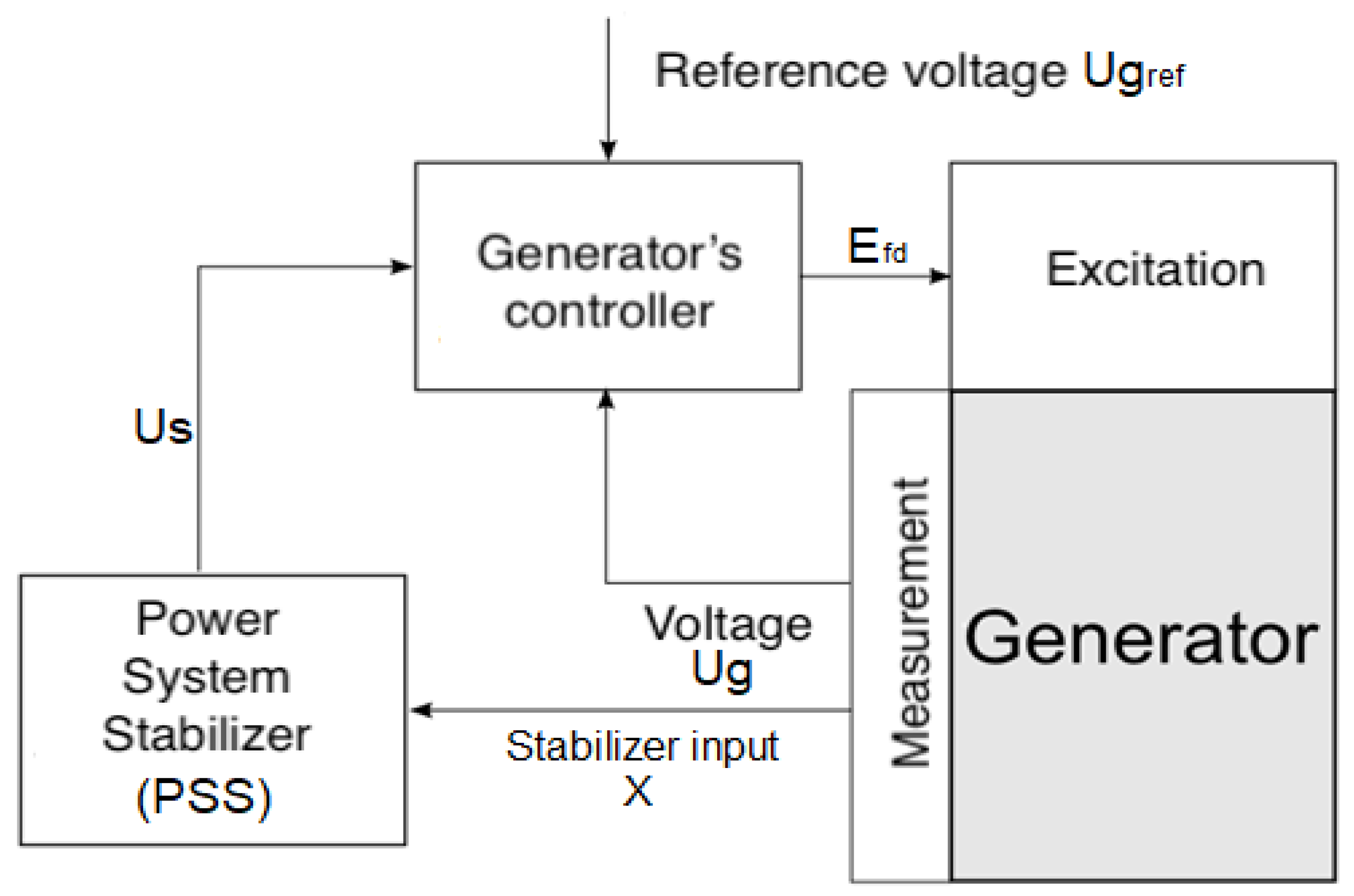
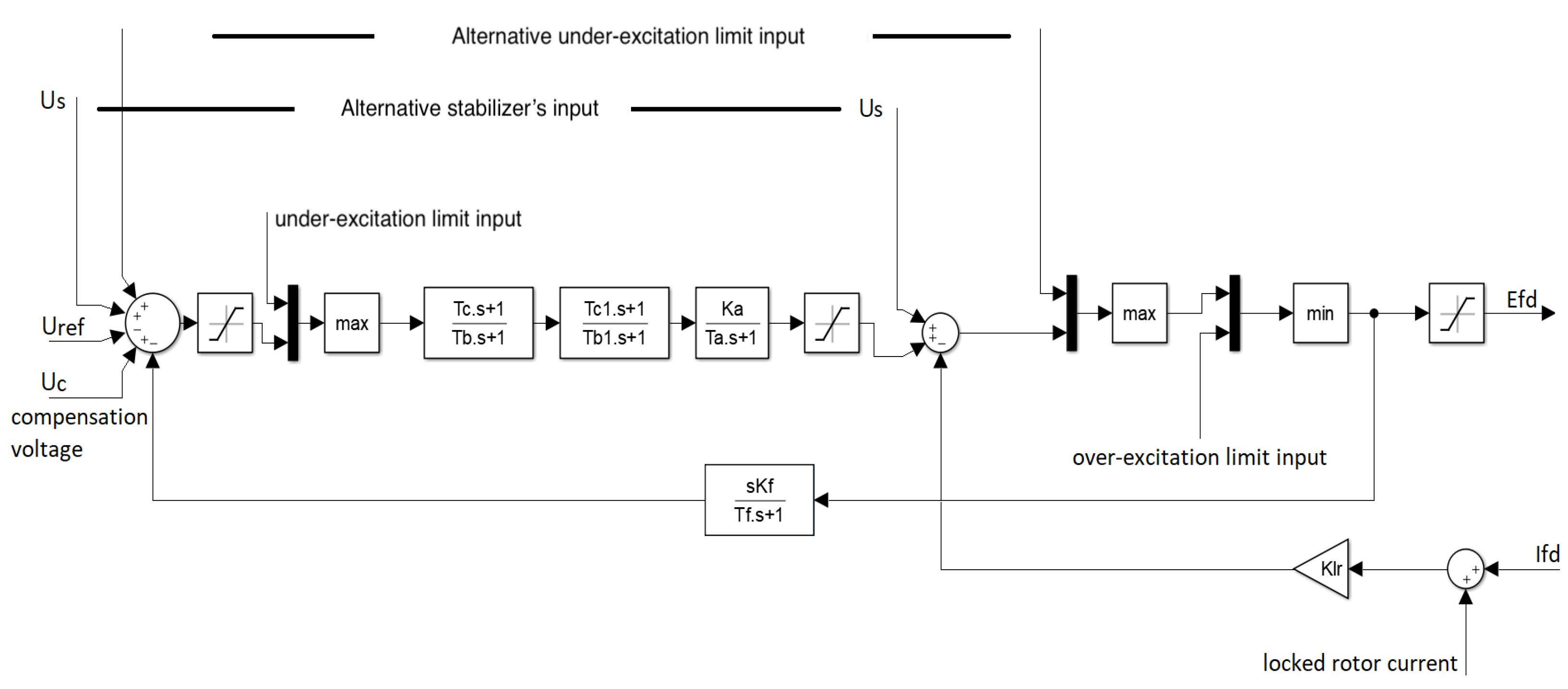
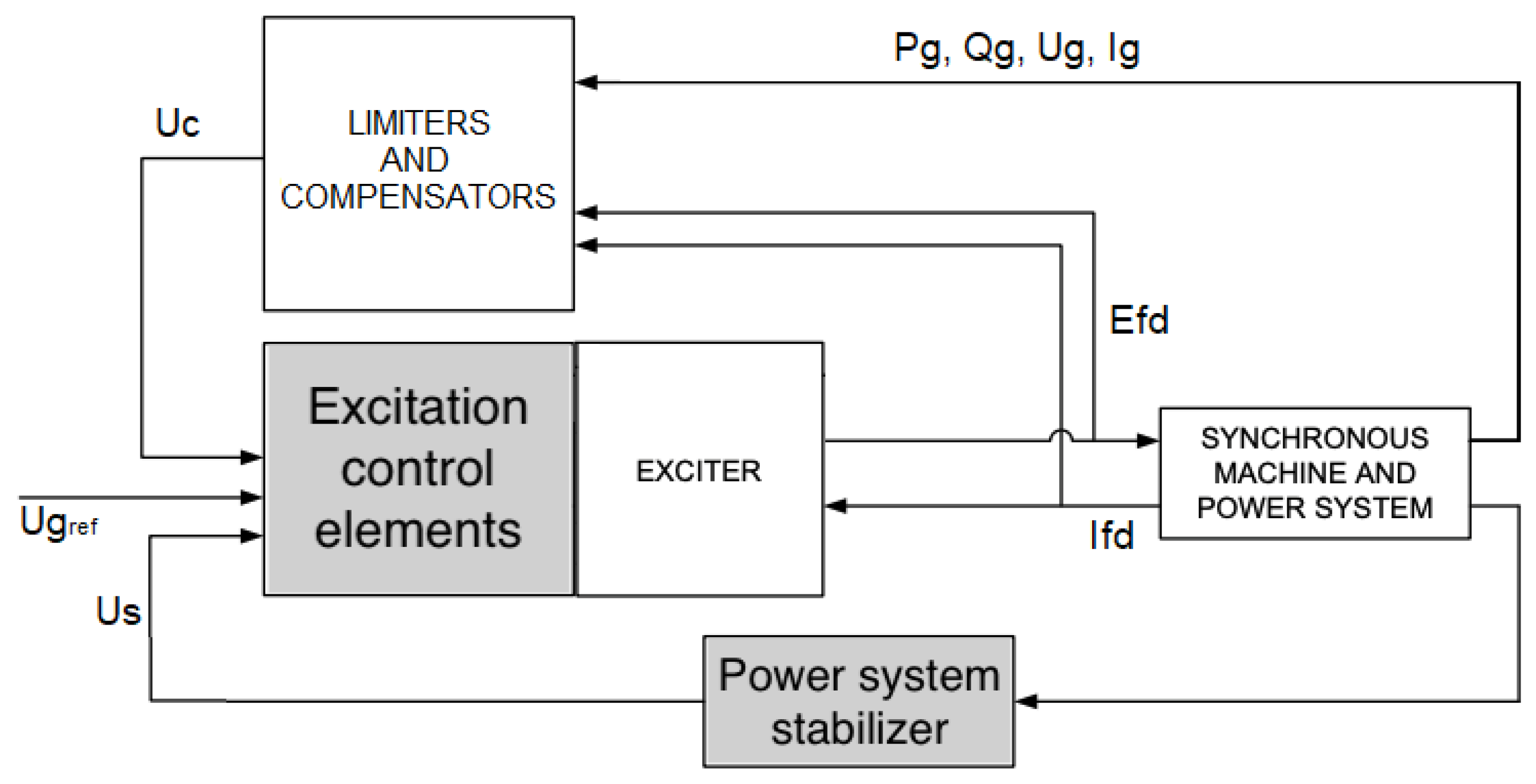
3.1. Classical Generator Control
3.2. Recursive Least Squares Method
- 1.
- Flexibility, that is, extending the model in such a way that it is able to describe the largest possible family of objects, i.e., the model has a sufficient number of parameters to describe the complex dynamics of identified objects.
- 2.
- Economy, the greatest possible simplification of the model and the number of parameters in order to avoid a situation in which several models with a given structure can describe the considered object, which leads to ambiguity, and also affects the extension of the calculation time.
- 3.
- Algorithm complexity, which has a significant impact on the time of its implementation.
- 0—no additional external auxiliary input is used,
- —generator’s rotational speed,
- —generator’s active power, and
- —turbine’s control valve opening degree (this signal can be exchanged between turbine’s and generator’s controllers without any additional measurements).
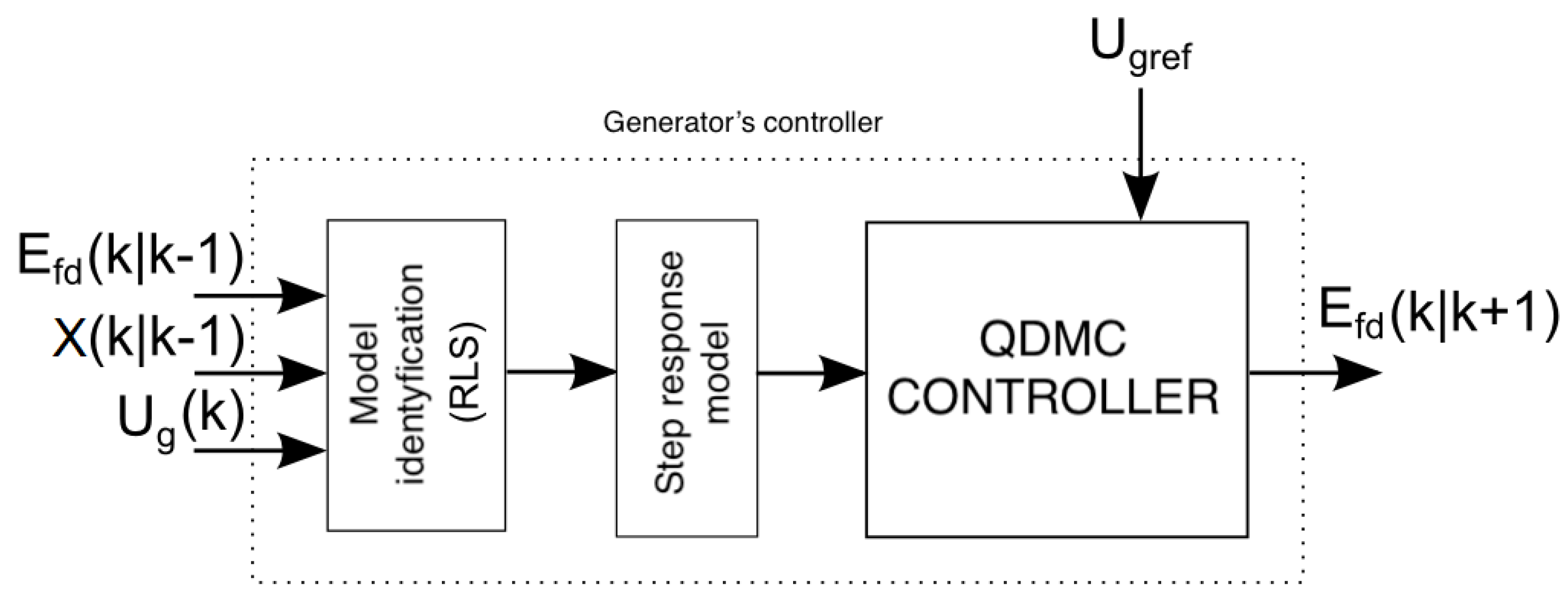
3.3. Model Predictive Control
- 1.
- Determining the structure of the discrete input-output model (6).
- 2.
- Identification of model parameters at each step of the algorithm operation (RLS, Section 3.2).
- 3.
- Calculation of the step response model based on the current discrete model at each step of the algorithm operation.
- 4.
- The use of the step response model in the algorithm of the MPC controller.
- (1)
- obtain ;
- (2)
- solve;
- (3)
- if , proceed to the last step; otherwise, proceed to the next step;
- (4)
- calculate the step lengthand add the active constraint to the active set whenever ;
- (5)
- improve the solutionand substitute and proceed to Step 1; and
- (6)
- check the sign of the Lagrange multipliers for inequality constraints: stop the algorithm if no multiplier is nonnegative; otherwise, remove the constraint corresponding to the largest positive multiplier and proceed to Step 2.
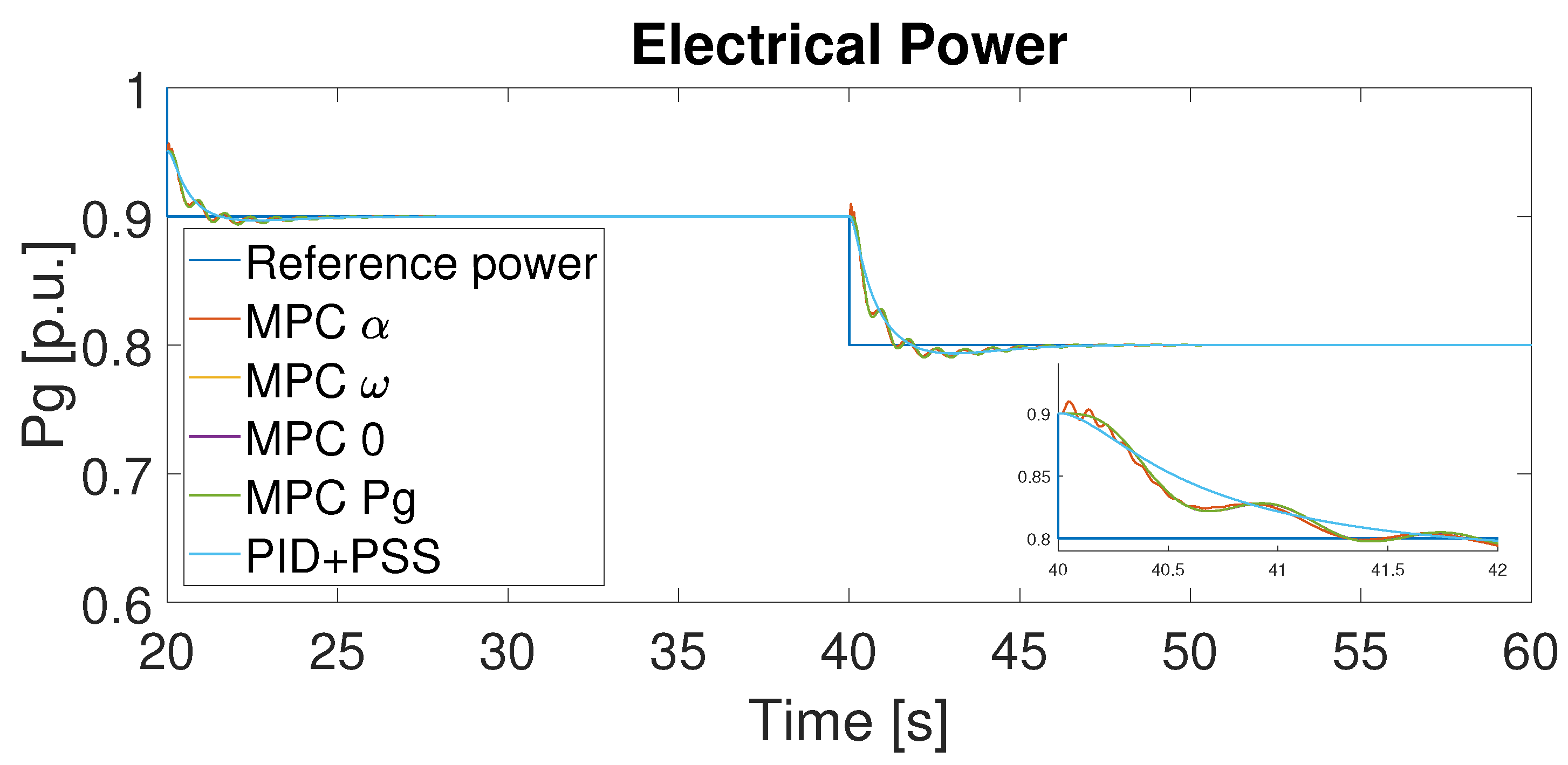
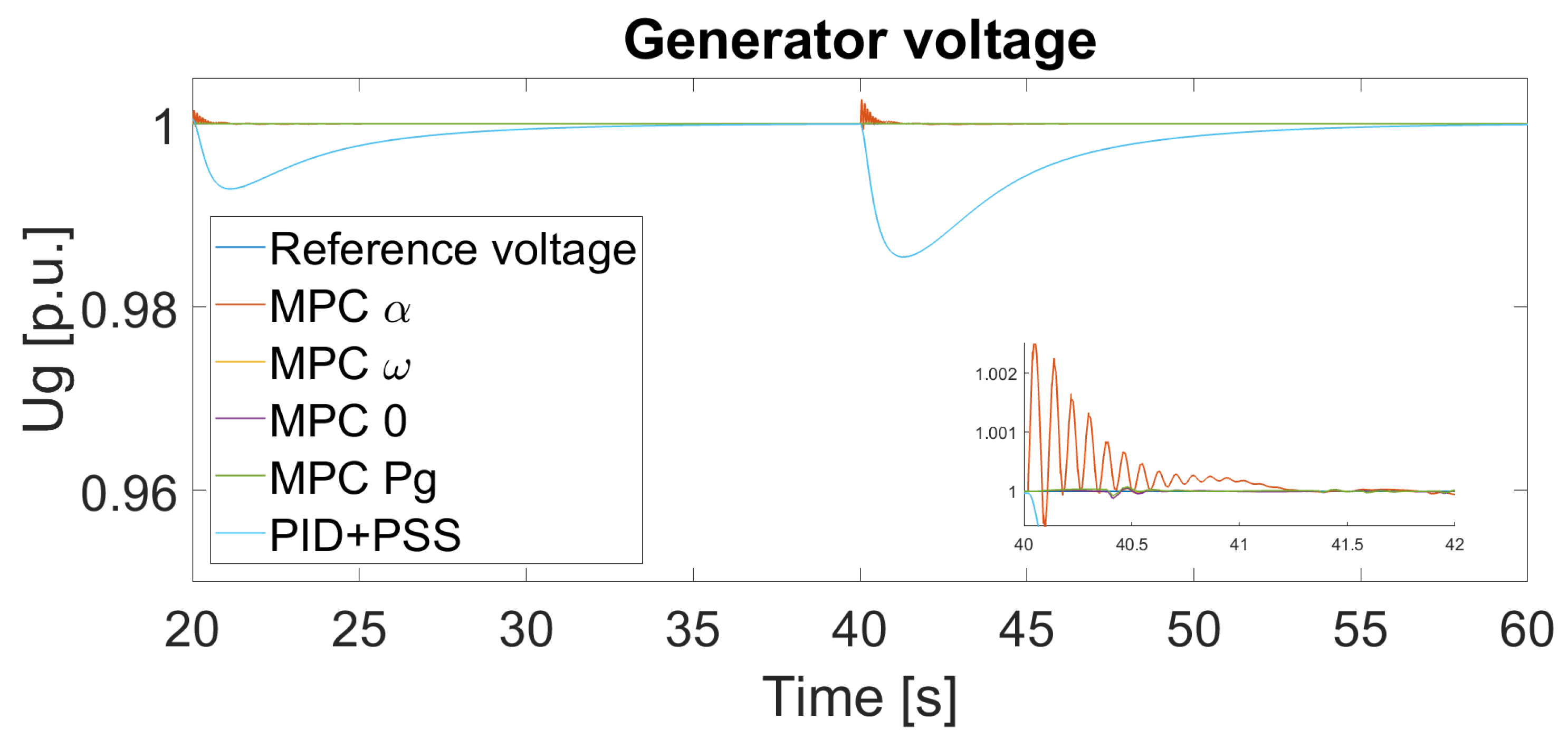
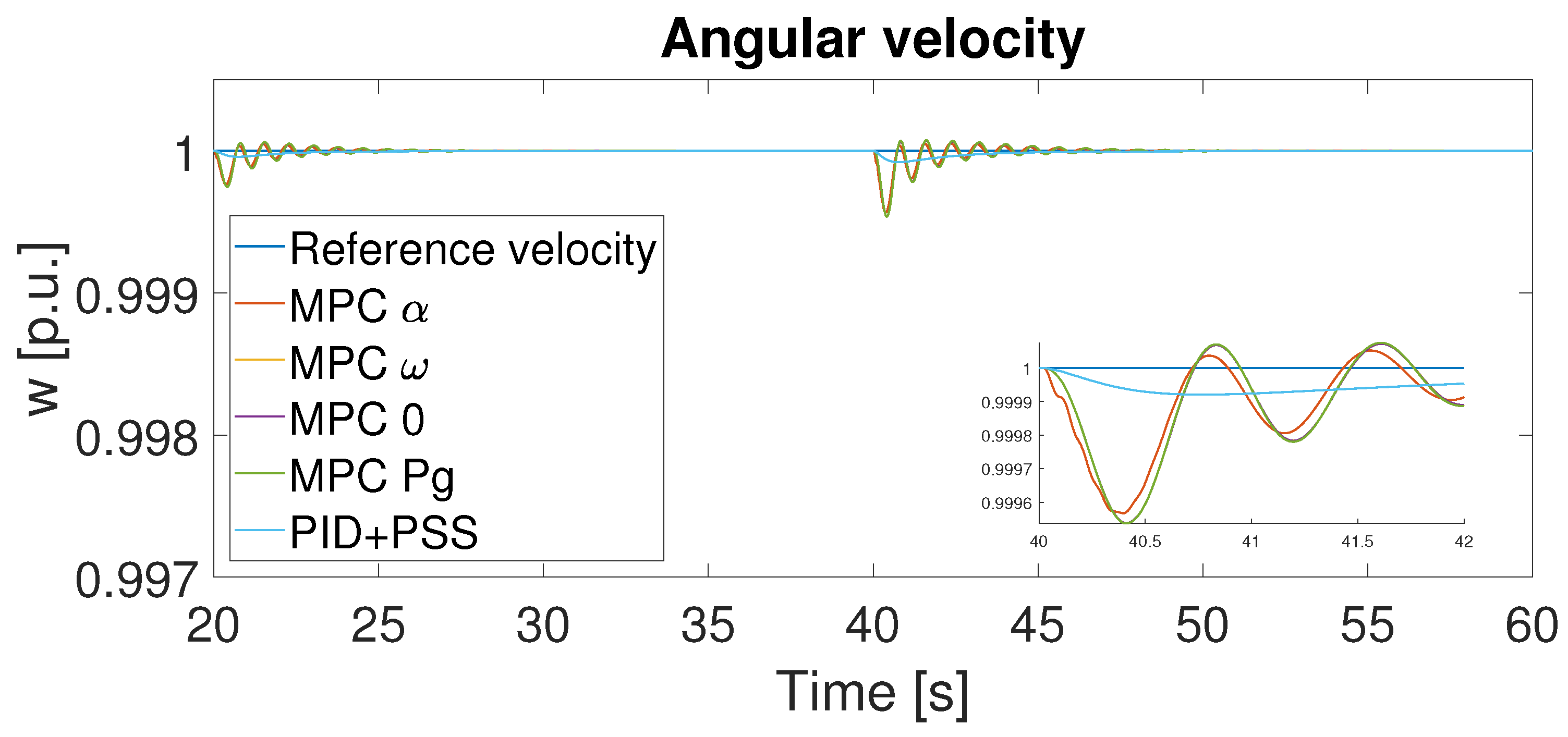
4. Simulation Test Results
- —an MPC controller with turbine’s control valve opening as an external auxiliary input,
- —an MPC controller with rotational speed as an external auxiliary input,
- —an MPC controller with active power as an external auxiliary input,
- —an MPC controller without any external auxiliary input, and
- —a simple controller based on PID and a simple system stabilizer.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Polish Power Networks (In Polish: Polskie Sieci Elektroenergetyczne S.A.). Annual Reports. Available online: https://www.pse.pl/dane-systemowe/funkcjonowanie-kse/raporty-roczne-z-funkcjonowania-kse-za-rok/raporty-za-rok-2020 (accessed on 13 June 2021).
- Energy Policy of Poland until 2040 Appendix 2 Conclusions from Forecast Analyses for the Energy Sector. Available online: https://www.gov.pl/web/klimat/polityka-energetyczna-polski (accessed on 20 June 2021).
- National Energy and Climate Plans, Assessment of the Final National Energy and Climate Plan of Poland. Available online: https://ec.europa.eu/energy/sites/default/files/documents/staff_working_document_assessment_necp_poland_en.pdf (accessed on 25 June 2021).
- Commission Implementing Decision (EU) 2017/ 1442-of 31 July 2017-Establishing Best Available Techniques (BAT) Conclusions, under Directive 2010/ 75/ EU of the European Parliament and of the Council, for Large Combustion Plants- (Notified Under Document C (2017) 5225). Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32017D1442&from=EN (accessed on 25 June 2021).
- Forecast of Peak Demand for Power in 2016–2035. Available online: https://www.pse.pl/-/prognoza-pokrycia-zapotrzebowania-szczytowego-na-moc-w-latach-2016-2035 (accessed on 27 June 2021). (In Polish).
- Polish Power Networks (In Polish: Polskie Sieci Elektroenergetyczne S.A.). Daily Reports. Available online: https://www.pse.pl/dane-systemowe/funkcjonowanie-kse/raporty-dobowe-z-pracy-kse (accessed on 28 June 2021).
- The Polish Nuclear Power Programme 2020. Available online: https://www.gov.pl/web/polski-atom/program-polskiej-energetyki-jadrowej (accessed on 27 June 2021).
- Oettingen, M. Assessment of the Radiotoxicity of Spent Nuclear Fuel from a Fleet of PWR Reactors. Energies 2021, 14, 3094. [Google Scholar] [CrossRef]
- Koltun, P.; Tsykalo, A.; Novozhilov, V. Life Cycle Assessment of the New Generation GT-MHR Nuclear Power Plant. Energies 2018, 11, 3452. [Google Scholar] [CrossRef]
- Sroka, K.; Grządzielski, I. Nuclear power plants in conditions of a catastrophic failure of power system (in Polish) Elektrownie jądrowe w warunkach awarii katastrofalnej. Acta Energy 2011, 1, 5–10. [Google Scholar]
- Hovsapian, R.; Osorio, J.D.; Panwar, M.; Chryssostomidis, C.; Ordonez, J.C. Grid-Scale Ternary-Pumped Thermal Electricity Storage for Flexible Operation of Nuclear Power Generation under High Penetration of Renewable Energy Sources. Energies 2021, 14, 3858. [Google Scholar] [CrossRef]
- Vajpayee, V.; Top, E.; Becerra, V.M. Analysis of Transient Interactions between a PWR Nuclear Power Plant and a Faulted Electricity Grid. Energies 2021, 14, 1573. [Google Scholar] [CrossRef]
- Peakman, A.; Merk, B.; Hesketh, K. The Potential of Pressurised Water Reactors to Provide Flexible Response in Future Electricity. Energies 2020, 13, 941. [Google Scholar] [CrossRef]
- Power, I.; Society, E. IEEE Recommended Practice for Excitation System Models for Power System Stability Studies; IEEE Std 421.5-2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- Tianshuo, S.; Ying, L.; Bin, H.; Dan, L.; Xiaoming, L. Simulation Study on Fuzzy Controller for Main Circuit of the Excitation Control System. In Proceedings of the 2013 IEEE International Conference on Vehicular Electronics and Safety, Dongguan, China, 28–30 July 2013. [Google Scholar]
- Ramya, R.; Selvi, K. A Simple Fuzzy Excitation Control System for Synchronous Generator. In Proceedings of the 2011 International Conference on Emerging Trends in Electrical and Computer Technology, Nagercoil, India, 23–24 March 2011. [Google Scholar]
- Gunes, M.; Dogru, N. Fuzzy Control of Brushless Excitation System for Steam Turbogenerators. IEEE Trans. Energy Convers. 2010, 25, 844–852. [Google Scholar] [CrossRef]
- Kitauchi, Y.; Taniguchi, H. Experimental Verification of Fuzzy Excitation Control System for Multi-machine Power System. IEEE Trans. Energy Convers. 1997, 12, 94–99. [Google Scholar] [CrossRef]
- Hiyama, T.; Miyazaki, K.; Satoh, H. A Fuzzy Logic Excitation System for Stability Enhancement of Power Systems with Multi-mode Oscillations. IEEE Trans. Energy Convers. 1996, 11, 449–454. [Google Scholar] [CrossRef]
- Cheng, Y.; Jiang, Z.; Xu, D.; Liu, Y. Nonlinear Analytical Fuzzy Logic Control of Generator Excitation. In Proceedings of the 2008 Third International Conference on Electric Utility Deregulation and Restructuring and Power Technologies, Nanjing, China, 6–9 April 2008. [Google Scholar]
- Al-Turki, Y.A.; Attia, A.F.; Soliman, H.F. Optimization of Fuzzy Logic Controller for Supervisory Power System Stabilizers. Acta Polytech. 2012, 52, 7–16. [Google Scholar] [CrossRef]
- Kim, K.; Rao, P.; Burnworth, J. Application of Swarm Intelligence to a Digital Excitation Control System. In Proceedings of the 2008 IEEE Swarm Intelligence Symposium, St. Louis, MO, USA, 21–23 September 2008. [Google Scholar]
- Hema’ndez, J.A.; Botero, H.A.; Ospina, J.D.; Perez, J.C. Excitation System Parameters Estimation Using Evolutionary Algorithms. In Proceedings of the 2006 IEEE/PES Transmission & Distribution Conference and Exposition: Latin America, Caracas, Venezuela, 15–18 August 2006. [Google Scholar]
- Gong, R.; Huang, Y.; Wei, H.; Meng, X.; Xie, L. Design of PID Excitation Controllers for Synchronous Generators Based on Fuzzy RBF Neural Network. In Proceedings of the 2008 International Conference on Electrical Machines and Systems, Wuhan, China, 8 August 2008. [Google Scholar]
- He, H.; Zhou, J.; Lei, H.; Li, C.; Yang, L. Research on fuzzy-PID excitation controller of synchronous generator based on improved PSO algorithm. In Proceedings of the Eighth International Conference on Machine Learning and Cybernetics, Baoding, China, 12–15 July 2009. [Google Scholar]
- Sun, L.; Feng, J.; Dimirovski, G.M.; Zhao, J. Adaptive Robust H∞ Control of the Generator Excitation System. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009. [Google Scholar]
- Suminal, D.; Erceg, G.; Idzotic, T. Excitation control of a synchronous generator using fuzzy logic stabilizing controller. In Proceedings of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005. [Google Scholar]
- Park, Y.M.; Choi, M.S.; Lee, K. A neural network-based power system stabilizer using power flow characteristics. IEEE Trans. Energy Convers. 1996, 11, 435–441. [Google Scholar] [CrossRef]
- Keskes, S.; Bouchiba, N.; Sallem, S.; Chrifi-Alaoui, L.; Kammoun, M.B.A. Optimal tuning of power system stabilizer using genetic algorithm to improve power system stability. In Proceedings of the 2017 International Conference on Green Energy Conversion Systems (GECS), Hammamet, Tunisia, 23–25 March 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar] [CrossRef]
- Löfberg, J. YALMIP: A Toolbox for Modeling and Optimization in MATLAB. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 2–4 September 2004. [Google Scholar]
- Heemels, W.P.M.H.; Donkers, M.C.F.; Teel, A.R. Periodic Event-Triggered Control for Linear Systems. IEEE Trans. Autom. Control 2013, 58, 847–861. [Google Scholar] [CrossRef]
- Sokólski, P.; Rutkowski, T.; Duzinkiewicz, K. The distributed model predictive controller for the nuclear power plant turbo-generator set. Adv. Intell. Syst. Comput. 2017, 577, 682–687. [Google Scholar]
- Sokolski, P.; Rutkowski, T.; Duzinkiewicz, K. Simplified, multiregional fuzzy model of a nuclear power plant steam turbine. In Proceedings of the 21ST International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 29 August–1 September 2016; pp. 379–384. [Google Scholar]
- Sokólski, P.; Kobylarz, A.; Kulkowski, K.; Duzinkiewicz, K.; Rutkowski, T.; Grochowski, M. Advanced control structures of turbo generator system of nuclear power plant. Acta Energy 2015, 3, 83–96. [Google Scholar] [CrossRef][Green Version]
- Sokolski, P.; Rutkowski, T.; Duzinkiewicz, K. The excitation controller with gain scheduling mechanism for synchronous generator control. In Proceedings of the 2015 20TH International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 24–27 August 2015; pp. 23–28. [Google Scholar]
- Sokólski, P.; Rutkowski, T.; Duzinkiewicz, K. The QDMC Model Predictive Controller for the Nuclear Power Plant Steam Turbine Control. In Krajowa Konferencja Automatyki; Advances in Intelligent Systems and Computing Book Series (AISC); Springer International Publishing: Berlin/Heidelberg, Germany, 2017; Volume 577, pp. 241–250. [Google Scholar]
- Imieliński, A. Mathematical Model of Synchronous Generator for Full-Scope Simulator; Gdańsk University of Technology, Faculty of Electrical and Control Engineering: Gdańsk, Poland, 1987. [Google Scholar]
- Perycz, S.; Próchnicki, W. The Mathematical Model of a Nuclear Power Plant VVER Block Steam Turbine Allowing to Study Transient Processes with w=var; Gdańsk University of Technology, Faculty of Electrical and Control Engineering: Gdańsk, Poland, 1989. [Google Scholar]
- Power System Dynamic Performance Committee. Dynamic Models for Turbine–Governors in Power System Studies. In IEEE Power & Energy Society; The Institute of Electrical and Electronic Engineers, Inc.: Piscataway, NJ, USA, 2013. [Google Scholar]
- Soderstrom, T.; Stoica, P. System Identification; Prentice Hall: Hemel Hempstead, UK, 1989. [Google Scholar]
- Sokolski, P. Implementacja Krzepkich Metod Estymacji Dla Celów Regulacji Predykcyjnej Typu MPC. Bachelor’s Thesis, Politechnika Gdańska, Gdańsk, Poland, 2010. (In Polish). [Google Scholar]
- Söderström, T.; Ljung, L.; Gustavsson, I. A Theoretical Analysis of Recursive Identification Methods. Automatica 1978, 14, 231–244. [Google Scholar] [CrossRef]
- Sokólski, P. Implementation of robust estimation methods for regulatory purposes predictive MPC type. Innov. Solut. Autom. Area 2011, 22, 44–52. [Google Scholar]
- Garcia, C.E.; Morshedi, A. Quadratic Programming Solution of Dynamic Matrix Control (QDMC). Chem. Eng. Commun. 1986, 46, 73–87. [Google Scholar] [CrossRef]
- Iranmanesh, H.; Afshar, A. MPC-Based Control of a Large-Scale Power System Subject to Consecutive Pulse Load Variations. IEEE Access 2017, 5, 26318–26327. [Google Scholar] [CrossRef]
- Maciejowski, J.M. Predictive Control: With Constraints; Prentice Hall: London, UK, 2002. [Google Scholar]
- Ba-Muqabel, A.A.; Abido, M.A. Review of conventional power system stabilizer design methods. In Proceedings of the 2006 IEEE GCC Conference (GCC), Manama, Bahrain, 20–22 March 2006; pp. 1–7. [Google Scholar] [CrossRef]
- Camacho, E.; Alba, C. Model Predictive Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Tatjewski, P. Advanced Control of Industrial Processes; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Hakvoort, R. System Identification for Robust Process Control: Nominal Models and Error Bounds. Ph.D. Thesis, Technische Universitet Delft, Delft, The Netherlands, 1994. [Google Scholar]
- Loo, C.; Vanfretti, L.; Liceaga-Castro, E.; Acha, E.E. Synchronous Generators Modeling and Control Using the Framework of Individual Channel Analysis and Design: Part 1. Int. J. Emerg. Electr. Power Syst. 2007, 8, 1–26. [Google Scholar]
- Wojtulewicz, A. Implementation of Dynamic Matrix Control Algorithm Using Field Programmable Gate Array: Preliminary Results. In Trends in Advanced Intelligent Control, Optimization and Automation; Springer International Publishing: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Wojtulewicz, A. Implementation of DMC algorithm in embedded controller-resources, memory and numerical modifications. In Trends in Advanced Intelligent Control, Optimization and Automation; Springer International Publishing: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Chaber, P.; Ławryńczuk, M. Implementation of Analytical Generalized Predictive Controller for Very Fast Applications Using Microcontrollers: Preliminary Results. In Trends in Advanced Intelligent Control, Optimization and Automation; Springer International Publishing: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Nebeluk, R.; Ławryńczuk, M. Tuning of Multivariable Model Predictive Control for Industrial Tasks. Algorithms 2021, 14, 10. [Google Scholar] [CrossRef]
- Commission Regulation (EU) 2016/631 of 14 April 2016 Establishing a Network Code on Requirements for Grid Connection of Generators. Available online: https://eur-lex.europa.eu/legal-content/en/ALL/?uri=CELEX%3A32016R0631 (accessed on 29 September 2021).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| outputs | power, voltage, frequency | |
| set values | reference power, constant set voltage and frequency values | |
| control signals | control valve opening, excitation voltage | |
| constraints | , | minimum/maximum: valve opening (0–100%), excitation system voltage ( |
| 40 | 41 | 42 | 43 | 44 | 45 | 46 | 47 | |
|---|---|---|---|---|---|---|---|---|
| 10 | 2.4387 | 2.3790 | 2.4315 | 2.5688 | 2.7062 | 2.9677 | 3.2324 | 3.7393 |
| 11 | 2.0458 | 1.9942 | 2.0383 | 2.1829 | 2.3395 | 2.5497 | 2.8270 | 3.1587 |
| 12 | 1.0768 | 0.9138 | 1.6176 | 1.8004 | 1.9839 | 2.2141 | 2.4476 | 2.7803 |
| 13 | 0.9638 | 0.7808 | 0.6702 | 0.6220 | 1.6392 | 1.8816 | 2.1633 | 2.4560 |
| 14 | 0.9500 | 0.7409 | 0.6182 | 0.5472 | 0.5179 | 0.5505 | 1.8418 | 2.1968 |
| 15 | 0.9486 | 0.7307 | 0.5993 | 0.5207 | 0.4783 | 0.4673 | 0.5076 | 1.9037 |
| 16 | 0.9495 | 0.7288 | 0.5900 | 0.5067 | 0.4619 | 0.4432 | 0.4552 | 0.5451 |
| 17 | 0.9509 | 0.7288 | 0.5867 | 0.4990 | 0.4517 | 0.4308 | 0.4383 | 0.4871 |
| 18 | 0.9534 | 0.7300 | 0.5862 | 0.4956 | 0.4446 | 0.4231 | 0.4287 | 0.4721 |
| 19 | 0.9571 | 0.7320 | 0.5870 | 0.4940 | 0.4401 | 0.4173 | 0.4226 | 0.4646 |
| 20 | 0.9614 | 0.7346 | 0.5886 | 0.4942 | 0.4380 | 0.4137 | 0.4186 | 0.4604 |
| 21 | 0.9659 | 0.7375 | 0.5905 | 0.4951 | 0.4373 | 0.4116 | 0.4162 | 0.4584 |
| 22 | 0.9705 | 0.7404 | 0.5927 | 0.4967 | 0.4377 | 0.4107 | 0.4156 | 0.4583 |
| 23 | 0.9750 | 0.7435 | 0.5951 | 0.4987 | 0.4389 | 0.4112 | 0.4159 | 0.4596 |
| ISE\ | 21 | 22 | 23 |
|---|---|---|---|
| 3.4 | 3.4 | 3.4 | |
| 3.5 | 3.5 | 3.5 | |
| 3.5 | 3.5 | 3.5 | |
| 3.5 | 3.5 | 3.5 |
| ITSE \ | 21 | 22 | 23 |
|---|---|---|---|
| 0.999 | 1.001 | 1.003 | |
| 1.086 | 1.086 | 1.086 | |
| 1.098 | 1.098 | 1.098 | |
| 1.087 | 1.087 | 1.087 |
| PID + PSS [57] | 12.82 | 29.03 | 0 | 0.65 | 1.74 | ||
| T | |||||||
| MPC | 22 | 1 | 1 | 0.01 | 1;1;1 | 0 |
| ISE | ITSE | |
|---|---|---|
| 33.76 | 10.01 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sokólski, P.; Rutkowski, T.A.; Ceran, B.; Horla, D.; Złotecka, D. Power System Stabilizer as a Part of a Generator MPC Adaptive Predictive Control System. Energies 2021, 14, 6631. https://doi.org/10.3390/en14206631
Sokólski P, Rutkowski TA, Ceran B, Horla D, Złotecka D. Power System Stabilizer as a Part of a Generator MPC Adaptive Predictive Control System. Energies. 2021; 14(20):6631. https://doi.org/10.3390/en14206631
Chicago/Turabian StyleSokólski, Paweł, Tomasz A. Rutkowski, Bartosz Ceran, Dariusz Horla, and Daria Złotecka. 2021. "Power System Stabilizer as a Part of a Generator MPC Adaptive Predictive Control System" Energies 14, no. 20: 6631. https://doi.org/10.3390/en14206631
APA StyleSokólski, P., Rutkowski, T. A., Ceran, B., Horla, D., & Złotecka, D. (2021). Power System Stabilizer as a Part of a Generator MPC Adaptive Predictive Control System. Energies, 14(20), 6631. https://doi.org/10.3390/en14206631