
Design and Implementation of Frequency Controller for Wind Energy-Based Hybrid Power System Using Quasi-Oppositional Harmonic Search Algorithm

 , , ,
, , ,  ,
,
Abstract
:1. Introduction
- (a)
- For the end-users, an alternative source of electricity may be the modelling of an IHPS.
- (b)
- For delivering the uninterrupted power supply for the ultimate consumer with quality, the appropriateness of SMES as an ESD may be investigated.
- (c)
- In designing the controller, the effectiveness of both FO calculus and IO calculus may be studied and the most suitable one may be adopted.
- (d)
- A new modified HS algorithm considers the concept of quasi-oppositional learning, i.e., the QOHS algorithm, recognized for efficient optimization process in regulating the deviations of frequency and power. This may be achieved by appropriately optimizing the vital optimizable variables of the IHPS system under study.
- (a)
- Improve the stability and reliability of IHPS (consists of WTG, DEG and SMES) for rural as well as urban areas with nil effects on the environment.
- (b)
- Enhance the quality of governor-regulated DEG supply power and the pitch-controlled WTG power output together with power obtained from SMES.
- (c)
- Implement the theory of fractional calculus for controller design to regulate its working principle.
- (d)
- Enhance the objective function-based convergence profile while employing the QOHS algorithm (a new HS algorithm variant, inspired by the concept of quasi-oppositional learning) for optimizing the tuning purpose of the optimizable variables of the controllers with additional vital variables of the system under study.
- (e)
- Evaluating the efficacy of the system while dealing with ambiguities, random load demand deviation and stochastic variation in step.
- (f)
- Analyze the QOHS algorithm and controllers’ robustness. Furthermore, the system robustness is also verified with load mismatch variation and the insertion of rate constraint-type non-linearity.
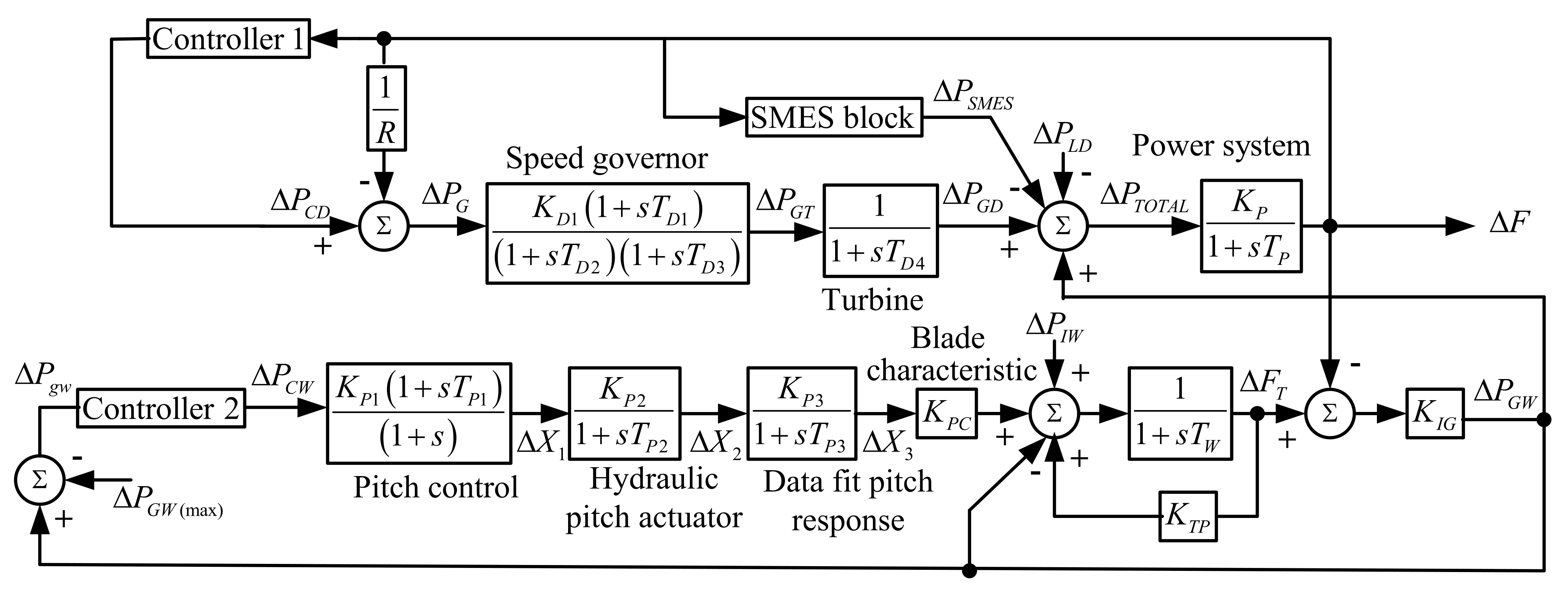
2. System Model
2.1. Wind Turbine Generator (WTG)
2.2. Diesel Engine Generators (DEG)
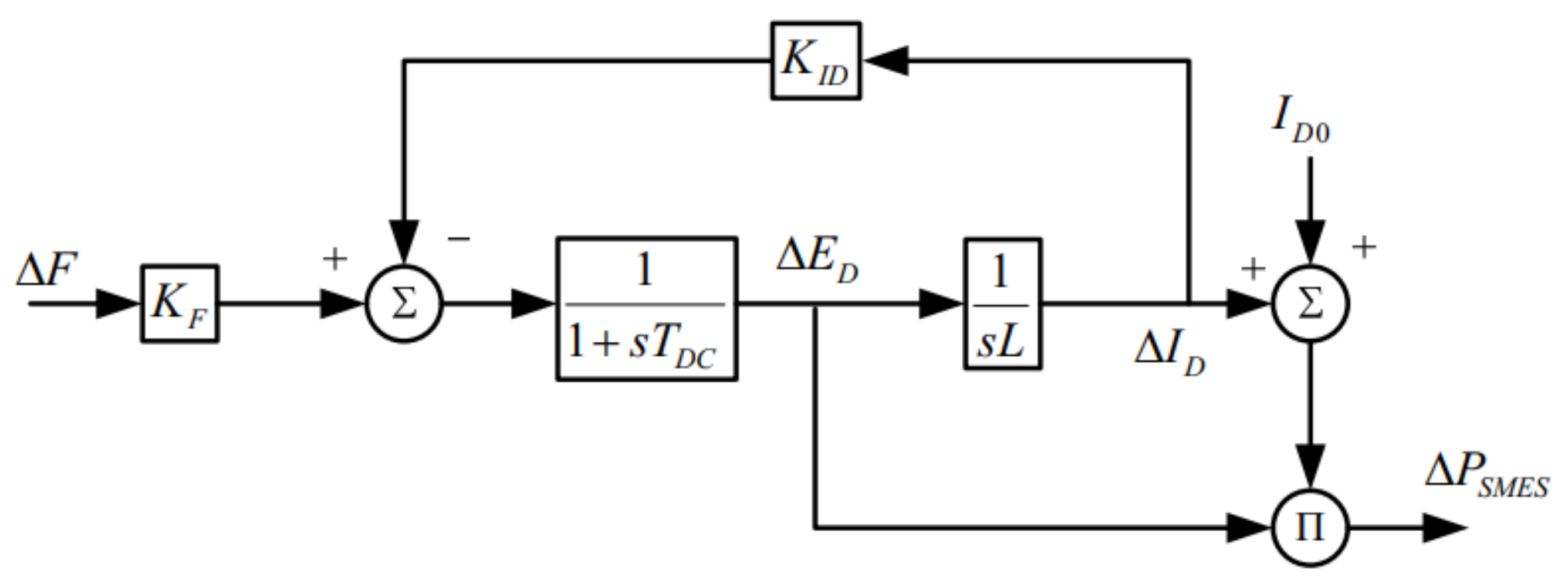
2.3. SMES Configuration
3. Designing of the System Controller
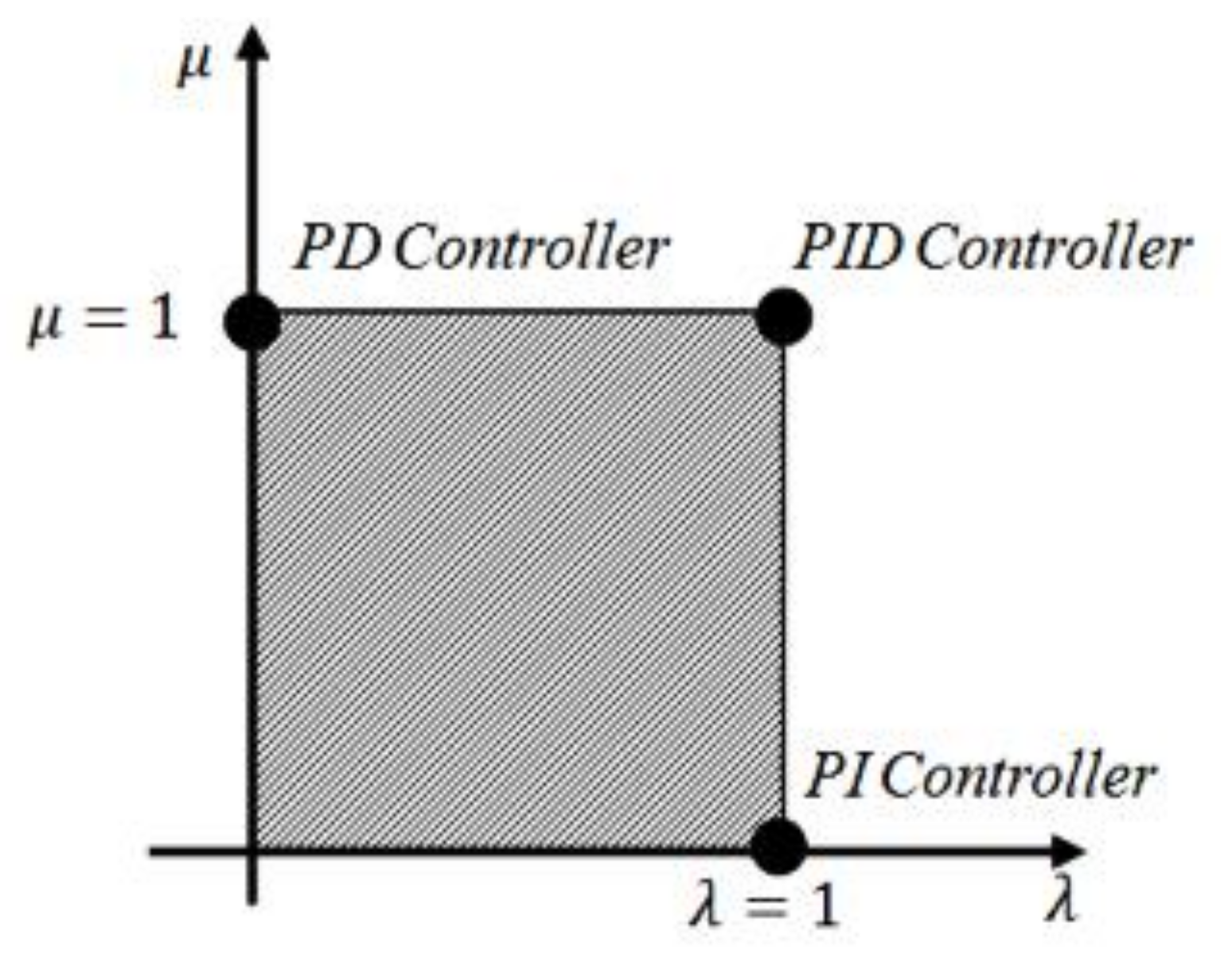
3.1. Essentials of FO Calculus
3.2. IO and FO Based PID Controllers
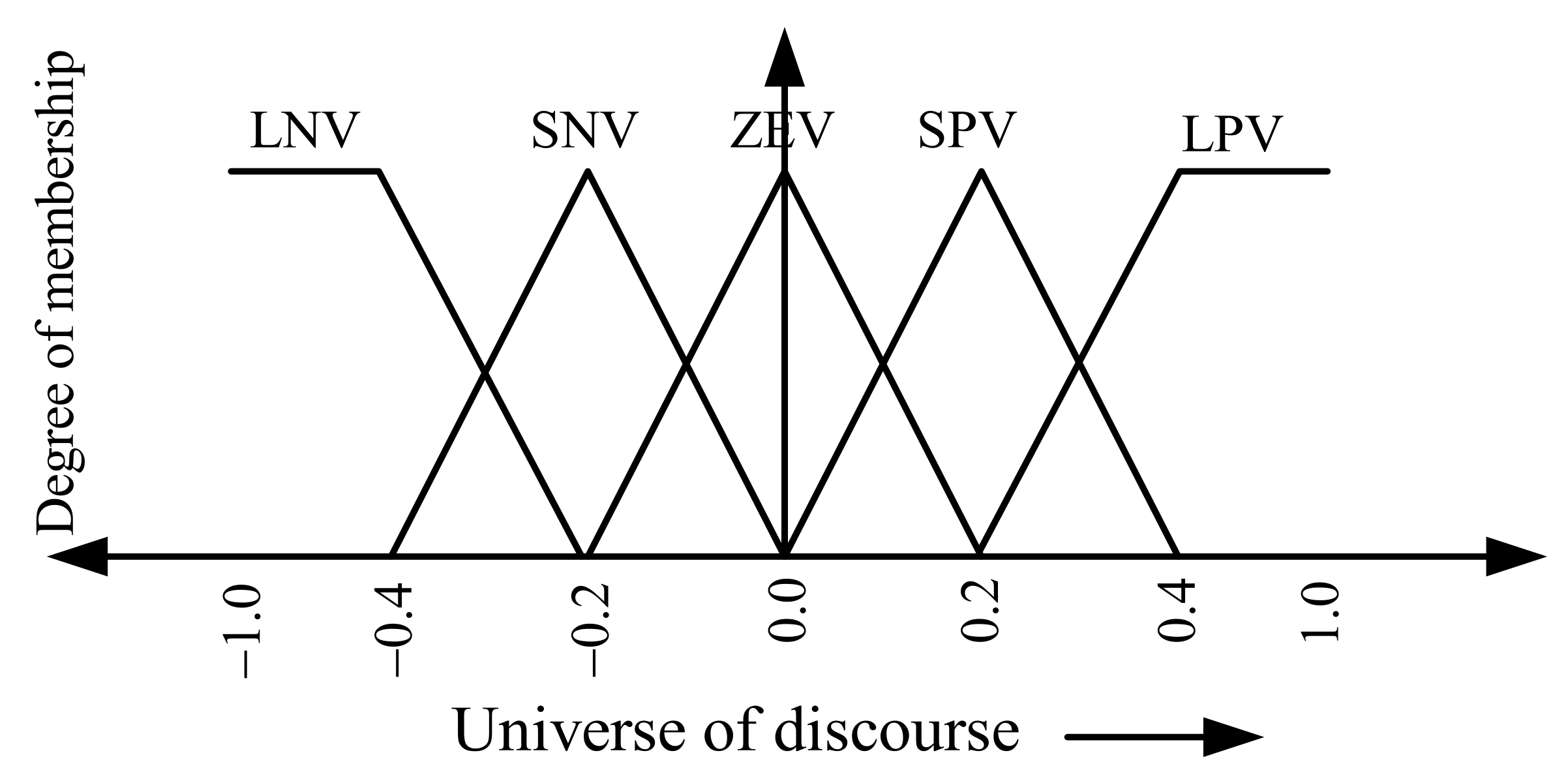
3.3. IO and FO Fuzzy-PID Controllers
4. Performance Index
- (a)
- For classical controllers:
- (b)
- For SMES unit:
- (c)
- For SFs of FLC:
- (i)
- Input
- (ii)
- Output
5. Quasi-Oppositional Harmony Search (QOHS) Algorithm
5.1. HS Algorithm
- Initialization: The variables of the algorithm along with the objective function is specified. The initial condition for the harmony memory (HM) may also be defined.
- Harmony improvisation: The novel vector solution is generated by adjusting the pitch and manner of randomization. Additionally, they are associated with the HM vector solution.
- Selection: Until terminating norms are met, the HM continues to find the best solution vector (harmony).
5.2. Quasi-Oppositional Learning: A Concept
5.3. Quasi-Oppositional Population Initialization
- (a)
- initialization of the evenly spread random population;
- (b)
- establishment of the population with the quasi-opposite learning concept;
- (c)
- evaluation of the objective function for each variable; and
- (d)
- best fitting population selection from the early population of a set.
5.4. Quasi-Oppositional Generation Jumping
5.5. QOHS Algorithm
6. Simulation and Result Analysis
- (a)
- Controllers 1 and 2 are considered as “PID controller” and the studied model is labelled as “PID”;
- (b)
- Controllers 1 and 2 are weighted by “FO-PID controller” and the studied model is labelled as “FO-PID”;
- (c)
- Controllers 1 and 2 are chosen as “IO-F-PID controller” and the studied model is labelled as “IO-F-PID”; and
- (d)
- Controllers 1 and 2 are realized as “FO-F-PID controller” and the model is labelled as “FO-F-PID”.
- Performance Analysis
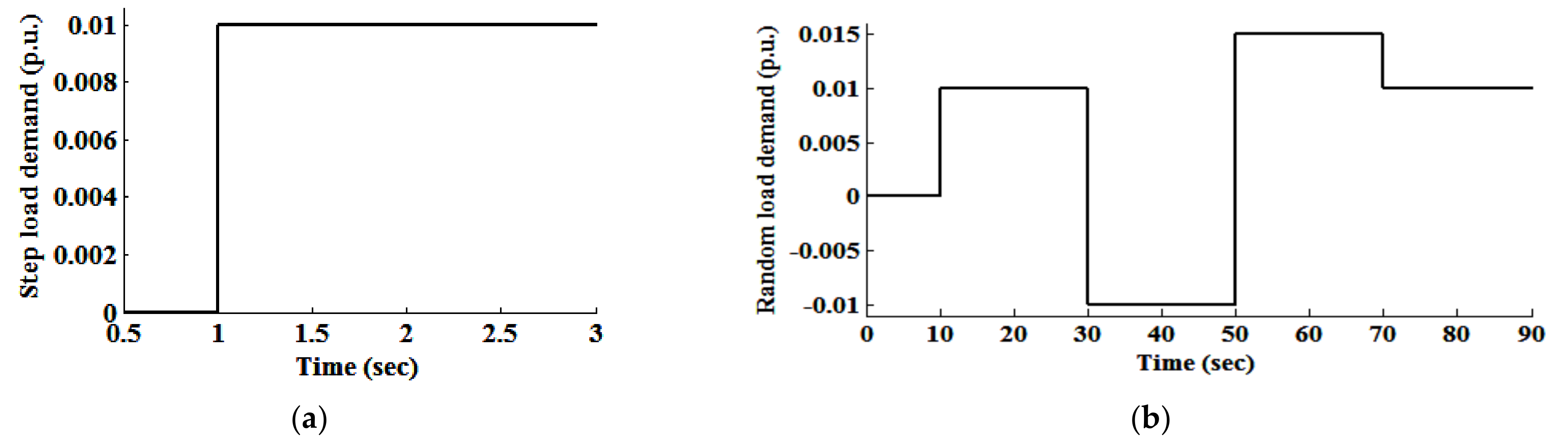
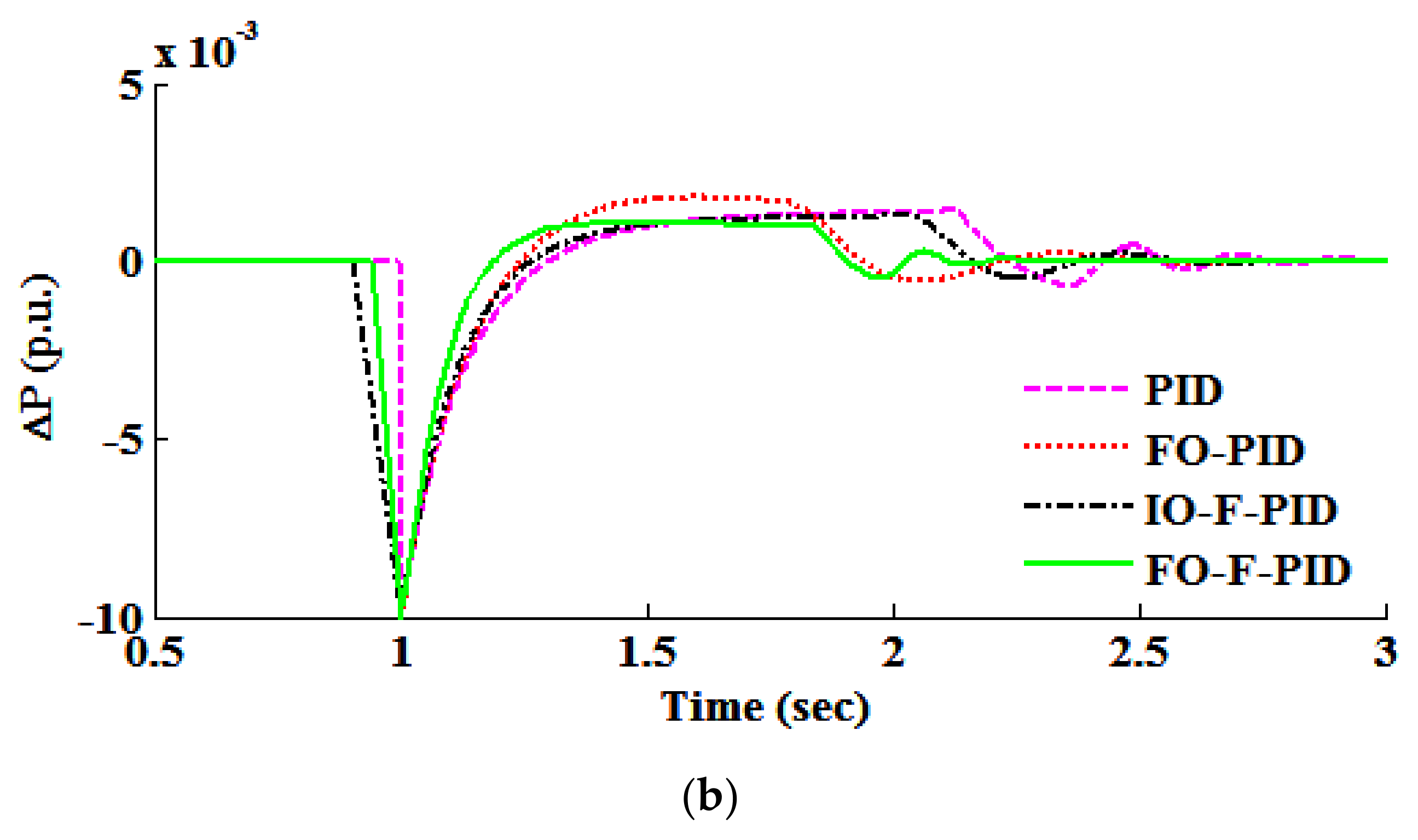
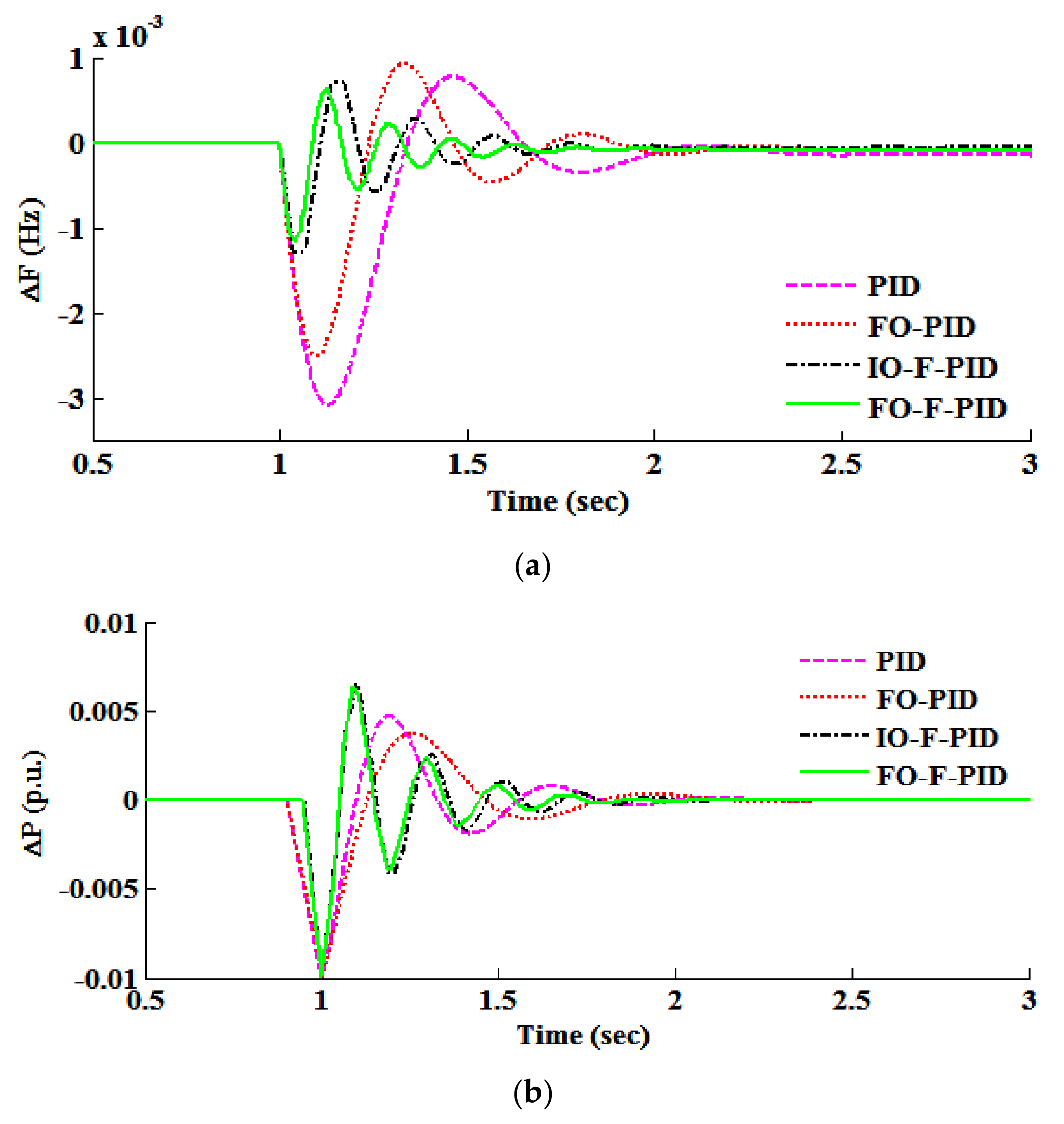
- Case I: Analyze the functioning for input load demand of 1% step
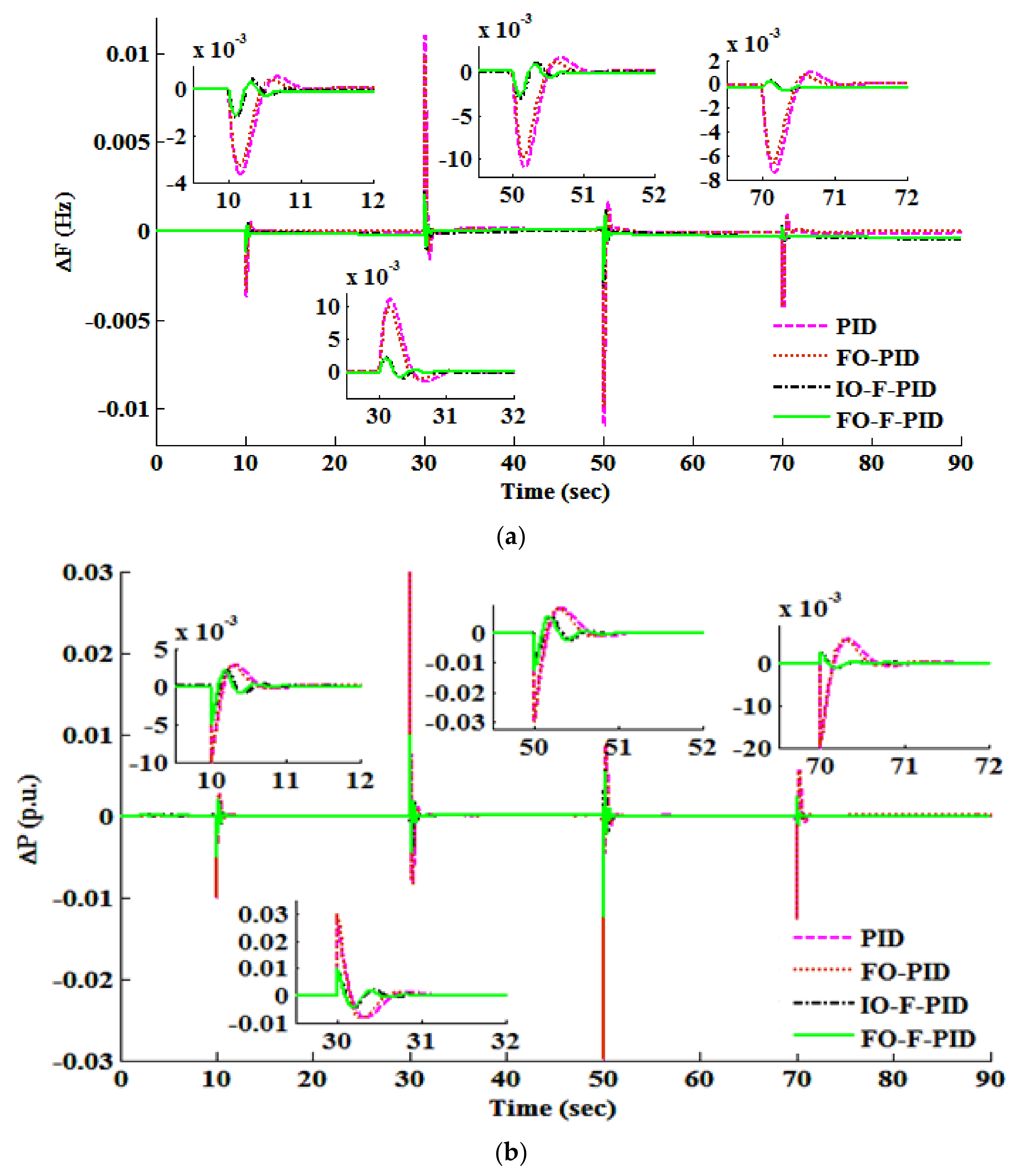
- Case II: Analyze the functioning for input random load demand
- Rate Constraint type
- Case III: Rate constraint type non-linear ESD operation
- Case IV: Rate constraint type non-linear DEG operation
- Effect of loading mismatch
- Case V: Lesser loading state
- Case VI: Higher loading state
6.1. Performance Analysis of Different Controller-Based Configurations
6.1.1. Case Study I: Performance Analysis for 1% Step Input Load Demand Condition
6.1.2. Case Study II: Performance Analysis under Random Load Demand Condition
6.2. Robustness Analysis of Different Controller-Based Configurations
6.2.1. Case Study III: Rate Constraint Type Non-Linear ESD Operation
6.2.2. Case Study IV: Rate Constraint Type Non-Linear DEG Operation
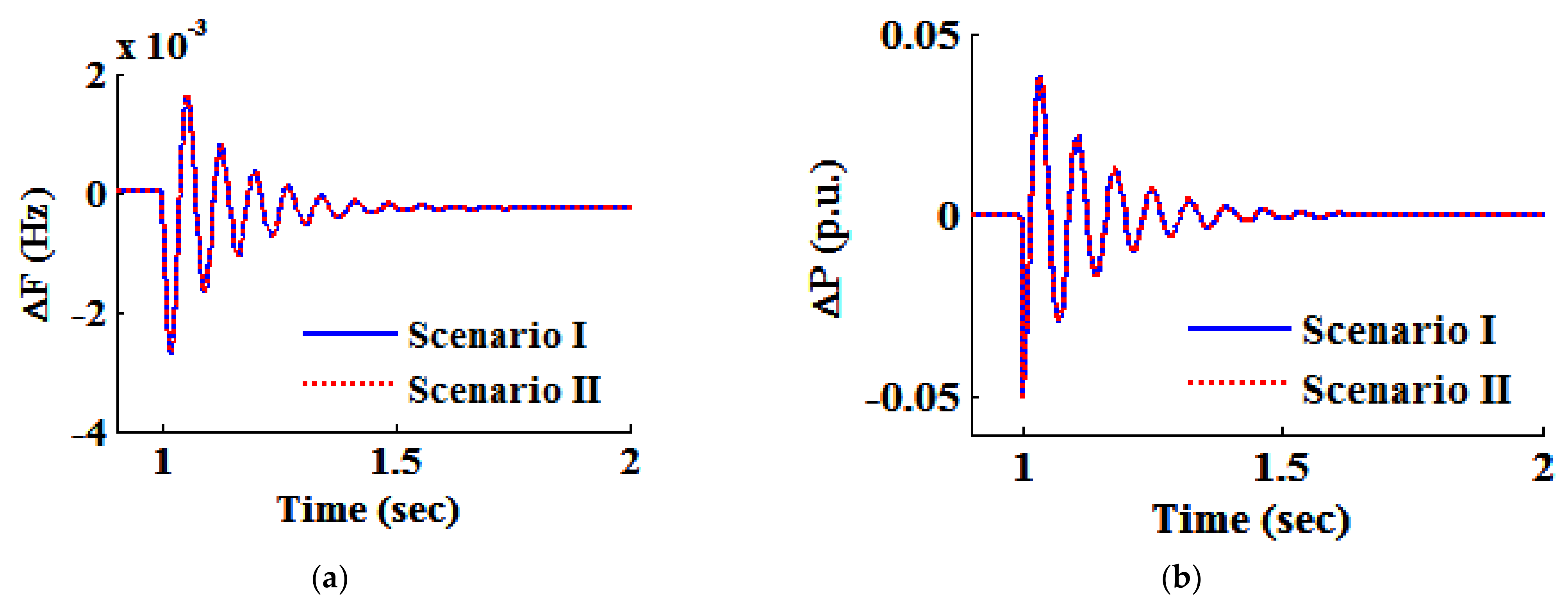
6.2.3. Case Study V: Lesser Loading State
6.2.4. Case Study VI: Higher Loading Mismatch State
7. Conclusions
- (a)
- For the studied IHPS, the hybridized classical fuzzy controller using the concept of FO of calculus is projected and the discrete system configurations framed are labelled as “PID”, “FO-PID”, “IO-F-PID” and “FO-F-PID”.
- (b)
- The FO concept applied in the controllers upholds its capability in governing the dynamics of the system.
- (c)
- For the IHPS application, the priority is to set up a static configuration for MF and the rule base of FLCs.
- (d)
- In the context of the considered associated power engineering problems, the utilization of the QOHS scheme proves to be effective in generating close proximity to the global optimal solution.
- (e)
- For the studied IHPS model, the “FO-PID” configuration’s performance and robustness are no less than that of the “IO-F-PID” arrangement.
- (f)
- In governing the deviations for both power and frequency in rate constraint-centered robustness analysis, the FO controllers proved their effectiveness and were found to be more competitive compared to the IO controller.
- (g)
- The complete performance and robustness analysis conclude that under the changing load conditions, the “FO-F-PID” controller is the most effective in limiting the changes for both power and frequency, followed by “IO-F-PID”, “FO-PID” and “PID” controllers.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nock, D.; Levin, T.; Baker, E. Changing the policy paradigm: A benefit maximization approach to electricity planning in developing countries. Appl. Energy 2020, 264, 114583. [Google Scholar] [CrossRef]
- Kirubi, C.; Jacobson, A.; Kammen, D.M.; Mills, A. Community-Based Electric Micro-Grids Can Contribute to Rural Development: Evidence from Kenya. World Dev. 2009, 37, 1208–1221. [Google Scholar] [CrossRef]
- Kaabeche, A.; Ibtiouen, R. Techno-economic optimization of hybrid photovoltaic/wind/diesel/battery generation in a stand-alone power system. Sol. Energy 2014, 103, 171–182. [Google Scholar] [CrossRef]
- Byrne, J.; Shen, B.; Wallace, W. The economics of sustainable energy for rural development: A study of renewable energy in rural China. Energy Policy 1998, 26, 45–54. [Google Scholar] [CrossRef]
- Bajpai, P.; Dash, V. Hybrid renewable energy systems for power generation in stand-alone applications: A review. Renew. Sustain. Energy Rev. 2012, 16, 2926–2939. [Google Scholar] [CrossRef]
- Holttinen, H.; Hirvonen, R. Power System Requirements for Wind Power; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Sebastián, R.; Castro, M.; Sancristobal, E.; Yeves, F.; Peire, J.; Quesada, J. Approaching hybrid wind-diesel systems and controller area network. IECON Proc. Ind. Electron. Conf. 2002, 3, 2300–2305. [Google Scholar]
- Li, W.; Joós, G. Comparison of energy storage system technologies and configurations in a wind farm. In Proceedings of the PESC Rec. IEEE Annual Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007; pp. 1280–1285. [Google Scholar]
- Tripathy, S.C.; Kalantar, M.; Balasubramanian, R. Dynamics and Stability of Wind and Diesel Turbine Generators with Superconducting Magnetic Energy Storage Unit on an Isolated Power System. IEEE Trans. Energy Convers. 1991, 6, 579–585. [Google Scholar] [CrossRef]
- Senjyu, T.; Hayashi, D.; Urasaki, N.; Funabashi, T. Oscillation frequency control based on H∞ controller for a small power system using renewable energy facilities in isolated island. In Proceedings of the 2002 IEEE Power Engineering Society General Meeting, Tokyo, Japan, 18–22 June 2002; pp. 117–124. [Google Scholar]
- Simoes, M.G.; Bose, B.K.; Spiegel, R.J. Design and performance evaluation of a fuzzy-logic-based variable-speed wind generation system. IEEE Trans. Ind. Appl. 1997, 33, 956–965. [Google Scholar] [CrossRef] [Green Version]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Li, W. Design of a hybrid fuzzy logic proportional plus conventional integral-derivative controller. IEEE Trans. Fuzzy Syst. 1998, 6, 449–463. [Google Scholar] [CrossRef] [Green Version]
- Carvajal, J.; Chen, G.; Ogmen, H. Fuzzy PID controller: Design, performance evaluation, and stability analysis. Inf. Sci. 2000, 123, 249–270. [Google Scholar] [CrossRef]
- Das, S. Functional Fractional Calculus for System Identification and Controls; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Podlubny, I. Fractional-order systems and PIλDµ-controllers. IEEE Trans Autom. Control 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Melício, R.; Mendes, V.M.F.; Catalão, J.P.S. Fractional-order control and simulation of wind energy systems with PMSG/full-power converter topology. Energy Convers. Manag. 2010, 51, 1250–1258. [Google Scholar] [CrossRef]
- Das, S.; Pan, I.; Das, S. Fractional order fuzzy control of nuclear reactor power with thermal-hydraulic effects in the presence of random network induced delay and sensor noise having long range dependence. Energy Convers. Manag. 2013, 68, 200–218. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Yuan, X.; Ji, B.; Wang, P.; Tian, H. Design of a fractional order PID controller for hydraulic turbine regulating system using chaotic non-dominated sorting genetic algorithm II. Energy Convers. Manag. 2014, 84, 390–404. [Google Scholar] [CrossRef]
- Das, S.; Pan, I.; Das, S. Performance comparison of optimal fractional order hybrid fuzzy PID controllers for handling oscillatory fractional order processes with dead time. ISA Trans. 2013, 52, 550–566. [Google Scholar] [CrossRef] [Green Version]
- Das, S.; Pan, I.; Das, S.; Gupta, A. A novel fractional order fuzzy PID controller and its optimal time domain tuning based on integral performance indices. Eng. Appl. Artif. Intell. 2012, 25, 430–442. [Google Scholar] [CrossRef] [Green Version]
- Pan, I.; Das, S. Chaotic multi-objective optimization based design of fractional order PI λD μ controller in AVR system. Int. J. Electr. Power Energy Syst. 2012, 43, 393–407. [Google Scholar] [CrossRef] [Green Version]
- Pan, I.; Das, S. Fractional-order load-frequency control of interconnected power systems using chaotic multi-objective optimization. Appl. Soft Comput. J. 2015, 29, 328–344. [Google Scholar] [CrossRef] [Green Version]
- Pan, I.; Das, S. Kriging based surrogate modeling for fractional order control of microgrids. IEEE Trans. Smart Grid 2015, 6, 36–44. [Google Scholar] [CrossRef] [Green Version]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A new heuristic optimization algorithm: Harmony search. Simulations 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Omran, M.G.H. Global-best harmony search. Appl. Math. Comput. 2008, 198, 643–656. [Google Scholar] [CrossRef]
- Mahdavi, M.; Fesanghary, M.; Damangir, E. An improved harmony search algorithm for solving optimization problems. Appl. Math. Comput. 2007, 188, 1567–1579. [Google Scholar] [CrossRef]
- Banerjee, A.; Mukherjee, V.; Ghoshal, S.P. An opposition-based harmony search algorithm for engineering optimization problems. Ain Shams Eng. J. 2014, 5, 85–101. [Google Scholar] [CrossRef] [Green Version]
- Tarkeshwar, M.; Mukherjee, V. Quasi-oppositional harmony search algorithm and fuzzy logic controller for load frequency stabilisation of an isolated hybrid power system. IET Gener. Transm. Distrib. 2015, 9, 427–444. [Google Scholar] [CrossRef]
- Bhatti, T.S.; Al-Ademi, A.A.F.; Bansal, N.K. Load frequency control of isolated wind diesel hybrid power systems. Energy Convers. Manag. 1997, 38, 829–837. [Google Scholar] [CrossRef]
- Yang, H.; Wei, Z.; Chengzhi, L. Optimal design and techno-economic analysis of a hybrid solar-wind power generation system. Appl. Energy 2009, 86, 163–169. [Google Scholar] [CrossRef]
- Ismail, M.S.; Moghavvemi, M.; Mahlia, T.M.I. Techno-economic analysis of an optimized photovoltaic and diesel generator hybrid power system for remote houses in a tropical climate. Energy Convers. Manag. 2013, 69, 163–173. [Google Scholar] [CrossRef]
- Sedaghat, B.; Jalilvand, A.; Noroozian, R. Design of a multilevel control strategy for integration of stand-alone wind/diesel system. Int. J. Electr. Power Energy Syst. 2012, 35, 123–137. [Google Scholar] [CrossRef]
- Tripathy, S.C.; Balasubramanian, R.; Nair, P.S.C. Effect of Superconducting Magnetic Energy Storage on Automatic Generation Control Considering Governor Deadband and Boiler Dynamics. IEEE Trans. Power Syst. 1992, 7, 1266–1273. [Google Scholar] [CrossRef]
- Monje, C.A.; Chen, Y.Q.; Vinagre, B.M.; Xue, D.; Feliu-Batlle, V. Fractional-Order Systems and Controls: Fundamentals and Applications; Springer: London, UK, 2010. [Google Scholar]
- Maiti, D.; Biswas, S.; Konar, A. Design of a fractional order PID controller using particle swarm optimization technique. In Proceedings of the 2nd National Conference on Recent Trends in Information Systems, Jadavpur University, Kolkata, India, 9–11 July 2015; pp. 1–5. [Google Scholar]
- Mudi, R.K.; Pal, N.R. A robust self-tuning scheme for PI- and PD-type fuzzy controllers. IEEE Trans. Fuzzy Syst. 1999, 7, 2–16. [Google Scholar] [CrossRef] [Green Version]
- Yeşil, E.; Güzelkaya, M.; Eksin, I. Self tuning fuzzy PID type load and frequency controller. Energy Convers. Manag. 2004, 45, 377–390. [Google Scholar] [CrossRef]
- Woo, Z.W.; Chung, H.Y.; Lin, J.J. A PID type fuzzy controller with self-tuning scaling factors. Fuzzy Sets Syst. 2000, 115, 321–326. [Google Scholar] [CrossRef]
- Banerjee, A.; Mukherjee, V.; Ghoshal, S.P. Modeling and seeker optimization based simulation for intelligent reactive power control of an isolated hybrid power system. Swarm Evol. Comput. 2013, 13, 85–100. [Google Scholar] [CrossRef]
- Yang, X.S.; Geem, Z.W. Harmony Search as a Metaheuristic Algorithm. In Music-Inspired Harmony Search Algorithm: Theory and Applications; Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2009; Volume 191, pp. 1–14. [Google Scholar]
- Tizhoosh, H.R. Opposition-based learning: A new scheme for machine intelligence. In Proceedings of the International Conference on Intelligent Agents, Web Technologies and Internet, CIMCA, Vienna, Austria, 28–30 November 2005; Volume 1, pp. 695–701. [Google Scholar]
- Rahnamayan, S.; Tizhoosh, H.R.; Salama, M.M.A. Opposition versus randomness in soft computing techniques. Appl. Soft Comput. J. 2008, 8, 906–918. [Google Scholar] [CrossRef]
- Rahnamayan, S.; Tizhoosh, H.R.; Salama, M.M.A. Quasi-oppositional differential evolution. In Proceedings of the 2007 IEEE Congress on Evolutionary Computation, CEC 2007, Singapore, 25–28 September 2007; pp. 2229–2236. [Google Scholar]
- Chatterjee, A.; Ghoshal, S.P.; Mukherjee, V. Solution of combined economic and emission dispatch problems of power systems by an opposition-based harmony search algorithm. Int. J. Electr. Power Energy Syst. 2012, 39, 9–20. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, R.; Wen, C. Robust load-frequency controller design for power systems. IEE Proc. C Gener. Transm. Distrib. 1993, 140, 11–16. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| e | LNV | SNV | ZEV | SPV | LPV | |
|---|---|---|---|---|---|---|
| LPV | ZEV | SPV | LPV | LPV | LPV | |
| SPV | SNV | ZEV | SPV | LPV | LPV | |
| ZEV | LNV | SNV | ZEV | SPV | LPV | |
| SNV | LNV | LNV | SNV | ZEV | SPV | |
| LNV | LNV | LNV | LNV | SNV | ZEV | |
| Unit | Parameters | Various Configurations of IHPS with Load Type | |||
|---|---|---|---|---|---|
| PID | FO-PID | ||||
| Gains of Different Controllers | Step | Random | Step | Random | |
| WTG | KPW | 0.3705 | 13.5215 | 16.0379 | 4.5142 |
| KIW | 1.0086 | 26.6082 | 11.0892 | 4.3424 | |
| KDW | 0.5738 | 4.0462 | 1.0083 | 4.1194 | |
| Wµ | 1.0 | 1.0 | 0.3323 | 0.5218 | |
| Wλ | 1.0 | 1.0 | 0.4199 | 0.6462 | |
| DEG | KPD | 1.0673 | 34.3797 | 3.3648 | 12.9453 |
| KID | 1.0296 | 14.4839 | 18.7786 | 25.9908 | |
| KDD | 1.0264 | 4.2786 | 0.0248 | 10.3135 | |
| Dµ | 1.0 | 1.0 | 0.6307 | 0.8277 | |
| Dλ | 1.0 | 1.0 | 0.2159 | 0.9191 | |
| SMES block | KSMES | 98.8751 | 78.5629 | 82.4721 | 95.8835 |
| TDC (sec) | 0.1243 | 0.0294 | 0.0368 | 0.2663 | |
| KID | 0.2699 | 0.7064 | 0.2857 | 0.0778 | |
| Unit | Parameters | Various Configurations of IHPS with Load Type | ||||
|---|---|---|---|---|---|---|
| IO-F-PID | FO-F-PID | |||||
| Gains of Different Controllers | Step | Random | Step | Random | Case V | |
| WTG | Ka1 | 0.8954 | 0.9813 | 0.5708 | 0.4462 | 0.7036 |
| Kb1 | 0.5092 | 0.6532 | 0.6291 | 0.1092 | 0.7553 | |
| KPIW | 5.4566 | 4.3456 | 3.9421 | 2.1884 | 4.3827 | |
| KPDW | 0.6651 | 0.8108 | 23.899 | 2.7175 | 2.3244 | |
| Wµ | 1.00 | 1.00 | 0.5273 | 1.0554 | 1.0447 | |
| Wλ | 1.00 | 1.00 | 0.9789 | 0.6416 | 0.5466 | |
| DEG | Ka2 | 0.2164 | 0.9291 | 1.0264 | 0.5513 | 0.9432 |
| Kb2 | 0.0553 | 0.7134 | 0.9207 | 0.5419 | 0.8003 | |
| KPID | 9.9449 | 2.8693 | 0.8971 | 0.579 | 10.826 | |
| KPDD | 0.9106 | 2.7937 | 27.254 | 2.3813 | 2.5427 | |
| Dµ | 1.00 | 1.00 | 1.0054 | 0.3507 | 0.8342 | |
| Dλ | 1.00 | 1.00 | 0.8203 | 0.5407 | 0.8754 | |
| SMES block | KSMES | 99.589 | 71.408 | 84.631 | 94.805 | 99.965 |
| TDC (sec) | 0.2673 | 0.0496 | 0.2542 | 0.1086 | 0.2395 | |
| KID | 2.2253 | 0.0605 | 2.4085 | 0.3194 | 2.1828 | |
| Controller Type | System Parameter | Mp (×10−3) | tr (sec) | ts (sec) | Ess (×10−4) | IAE (×10−4) | ISE (×10−7) | ITSE (×10−7) | ITAE (×10−4) |
|---|---|---|---|---|---|---|---|---|---|
| PID | ΔF | 0.859 | 0.398 | 1.425 | 8.703 | 2.279 | 1.217 | 3.677 | 4.673 |
| FO-PID | ΔF | 0.579 | 0.382 | 1.153 | 5.806 | 1.777 | 1. 108 | 3.004 | 3.957 |
| IO-F-PID | ΔF | 0.447 | 0.429 | 0.896 | 3.687 | 0.956 | 0.871 | 2.285 | 3.278 |
| FO-F-PID | ΔF | 0.344 | 0.417 | 0.764 | 1.585 | 0.851 | 0.629 | 2.289 | 2.810 |
| Controller Type | System Parameter | Mp (×10−3) | tr (sec) | ts (sec) | Ess (×10−4) | IAE (×10−4) | ISE (×10−7) | ITSE (×10−7) | ITAE (×10−4) |
|---|---|---|---|---|---|---|---|---|---|
| PID | ΔF | 0.205 | 1.192 | 1.755 | 0.877 | 3.726 | 1.275 | 1.811 | 6.099 |
| FO-PID | ΔF | 0.148 | 1.132 | 1.535 | 0.942 | 2.248 | 0.499 | 0.659 | 4.326 |
| IO-F-PID | ΔF | 0.325 | 0.921 | 1.415 | 0.521 | 3.709 | 1.166 | 1.656 | 6.519 |
| FO-F-PID | ΔF | 0.019 | 0.884 | 1.167 | 0.495 | 3.717 | 0.128 | 0.181 | 6.064 |
| Controller Type | System Parameter | Mp (×10−3) | tr (sec) | ts (sec) | Ess (×10−4) | IAE (×10−4) | ISE (×10−7) | ITSE (×10−7) | ITAE (×10−4) |
|---|---|---|---|---|---|---|---|---|---|
| PID | ΔF | 0.763 | 0.392 | 1.367 | 1.516 | 3.132 | 2.741 | 8.447 | 9.978 |
| FO-PID | ΔF | 0.931 | 0.288 | 1.163 | 1.021 | 3.099 | 2.595 | 8.114 | 9.596 |
| IO-F-PID | ΔF | 0.725 | 0.138 | 0.946 | 0.633 | 2.262 | 1.331 | 3.938 | 6.828 |
| FO-F-PID | ΔF | 0.620 | 0.108 | 0.791 | 0.947 | 1.864 | 1.263 | 2.121 | 5.295 |
| Scenario | Loading Consideration under Parameter Optimization | Practical Loading |
|---|---|---|
| I | 90.00% | 90.00% |
| II | 90.00% | 85.00% |
| Considered Case | Scenario | Frequency Deviation | Mp (×10−3) | Ess (×10−4) | tr (sec) | ts (sec) |
|---|---|---|---|---|---|---|
| Case V | Scenario I | ΔF | 1.619 | 2.775 | 0.054 | 0.63 |
| Scenario II | ΔF | 1.617 | 2.775 | 0.054 | 0.63 | |
| Case VI | Scenario I | ΔF | 1.619 | 2.775 | 0.054 | 0.63 |
| Scenario II | ΔF | 1.621 | 2.775 | 0.054 | 0.63 |
| Scenario | Loading Consideration under Parameter Optimization | Practical Loading |
|---|---|---|
| I | 90.00% | 90.00% |
| II | 90.00% | 95.00% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahto, T.; Kumar, R.; Malik, H.; Khan, I.A.; Al Otaibi, S.; Albogamy, F.R. Design and Implementation of Frequency Controller for Wind Energy-Based Hybrid Power System Using Quasi-Oppositional Harmonic Search Algorithm. Energies 2021, 14, 6459. https://doi.org/10.3390/en14206459
Mahto T, Kumar R, Malik H, Khan IA, Al Otaibi S, Albogamy FR. Design and Implementation of Frequency Controller for Wind Energy-Based Hybrid Power System Using Quasi-Oppositional Harmonic Search Algorithm. Energies. 2021; 14(20):6459. https://doi.org/10.3390/en14206459
Chicago/Turabian StyleMahto, Tarkeshwar, Rakesh Kumar, Hasmat Malik, Irfan Ahmad Khan, Sattam Al Otaibi, and Fahad R. Albogamy. 2021. "Design and Implementation of Frequency Controller for Wind Energy-Based Hybrid Power System Using Quasi-Oppositional Harmonic Search Algorithm" Energies 14, no. 20: 6459. https://doi.org/10.3390/en14206459
APA StyleMahto, T., Kumar, R., Malik, H., Khan, I. A., Al Otaibi, S., & Albogamy, F. R. (2021). Design and Implementation of Frequency Controller for Wind Energy-Based Hybrid Power System Using Quasi-Oppositional Harmonic Search Algorithm. Energies, 14(20), 6459. https://doi.org/10.3390/en14206459