Integrated Offshore Seismic Survey Using an Unmanned Wave Glider


Abstract
1. Introduction
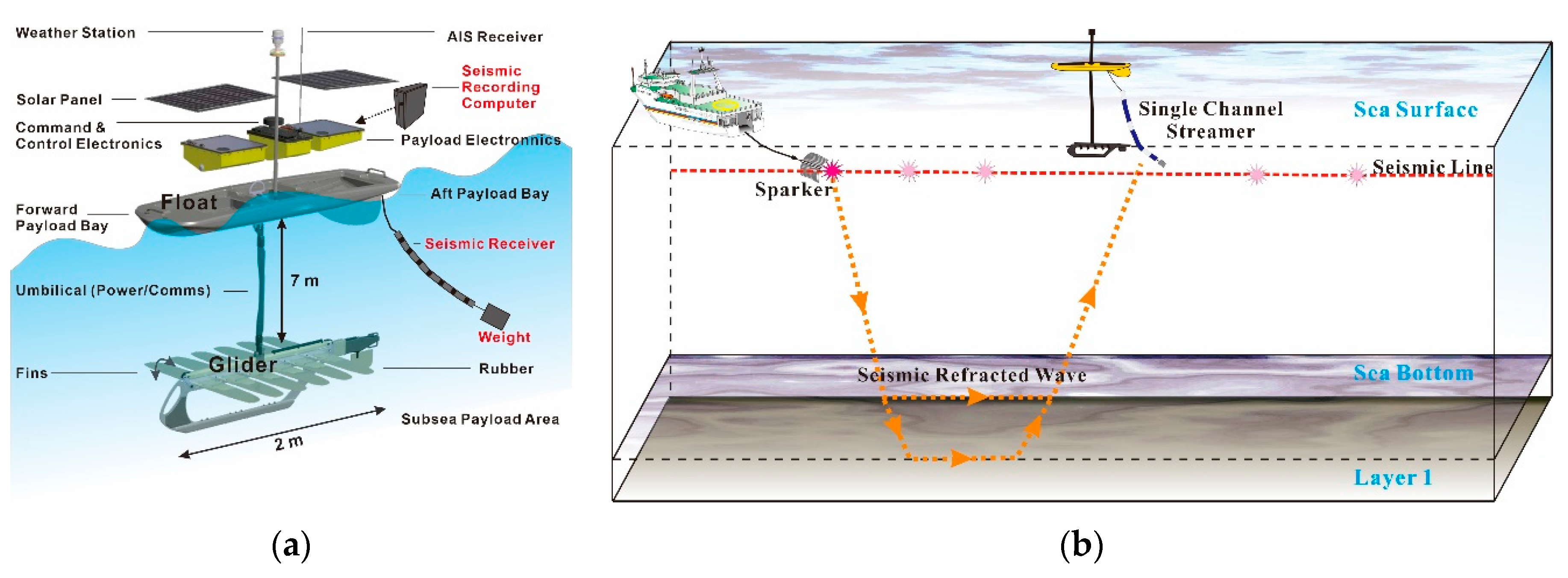
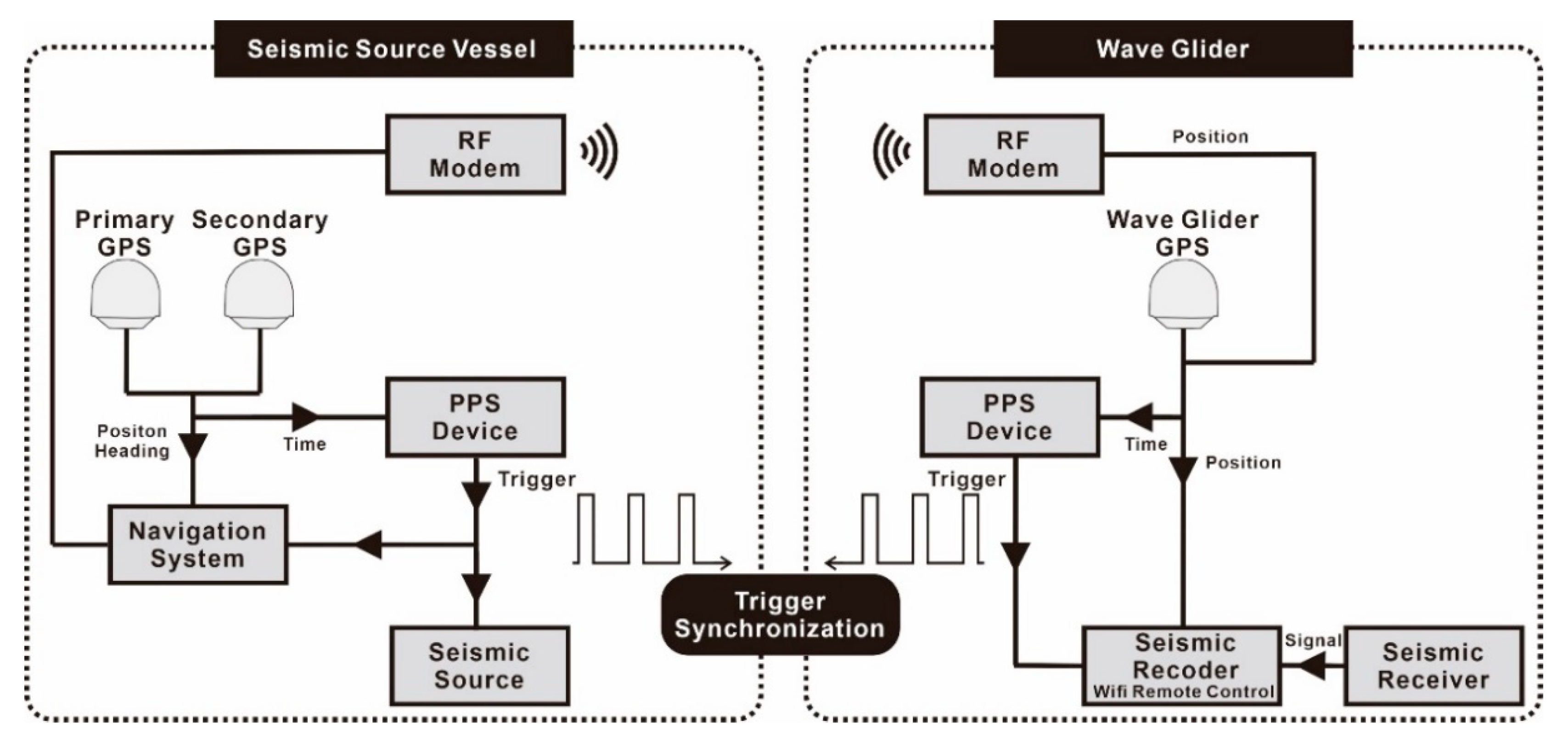
2. Configuration of the Wave Glider and Seismic Survey
3. Field Survey and Seismic Data
3.1. Study Area
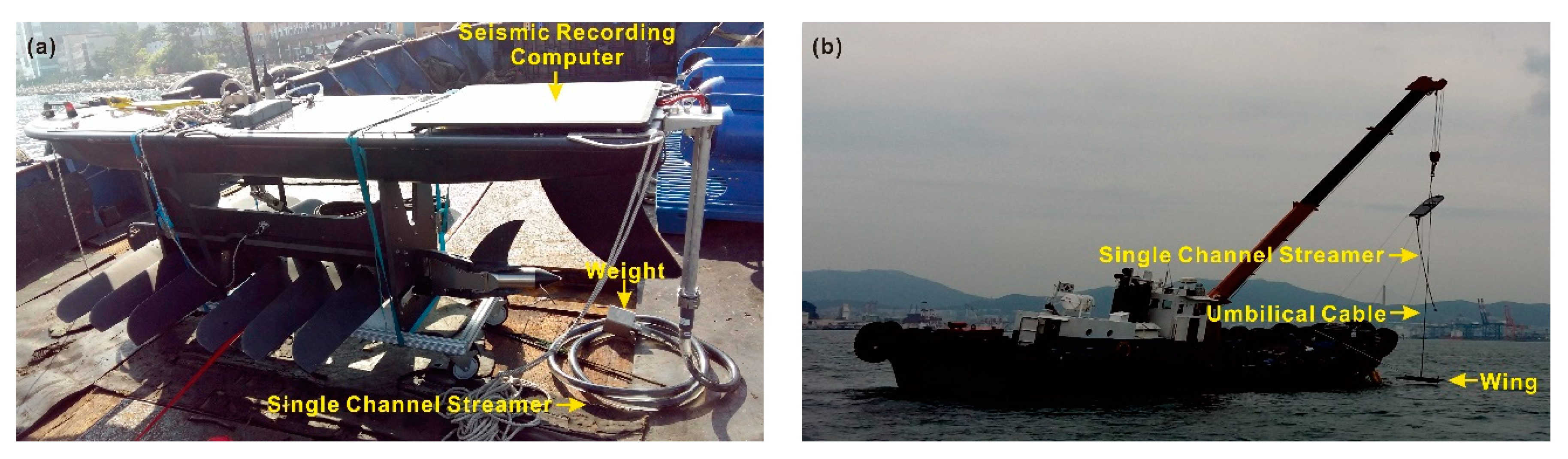
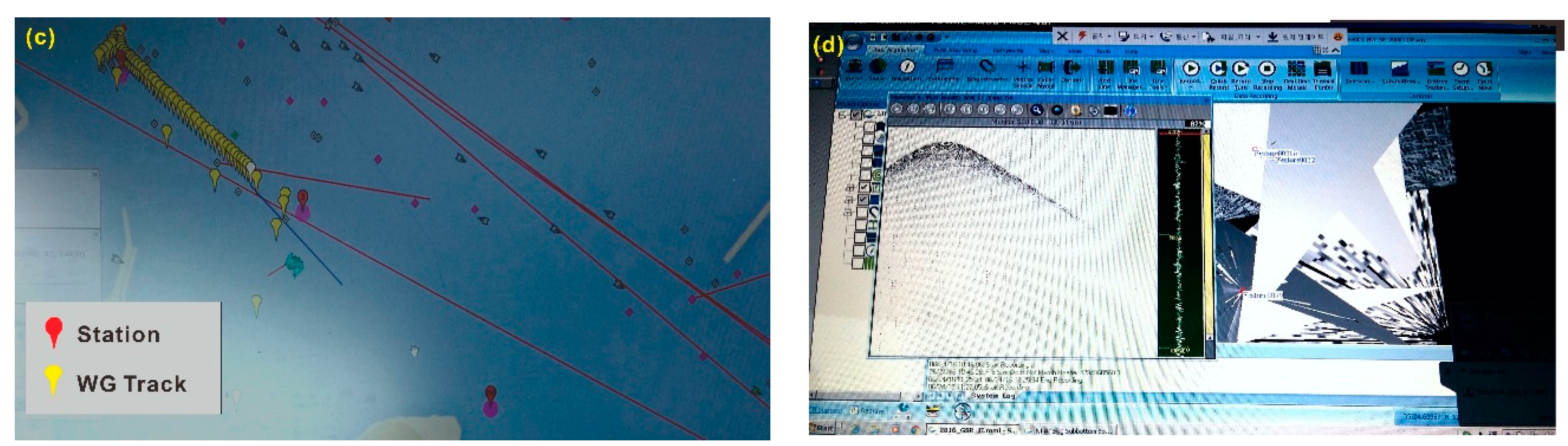
3.2. Field Acquisition
4. Data Processing
4.1. Refraction Data Processing
4.2. Reflection Data Processing
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wynn, R.B.; Huvenne, V.A.I.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous under water vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef]
- Paull, C.K.; Normark, W.R.; Ussler, W., III; Caress, D.W.; Keaten, R. Association among active seafloor deformation, mound formation, and gas hydrate growth and accumulation within the seafloor of the Santa Monica Basin, offshore California. Mar. Geol. 2008, 250, 258–275. [Google Scholar] [CrossRef]
- Maier, K.L.; Brothers, D.S.; Paull, C.K.; McGann, M.; Caress, D.W.; Conrad, J.E. Records of continental slope sediment flow morphodynamic responses to gradient and active faulting from integrated AUV and ROV data, offshore Palos Verdes, southern California Borderland. Mar. Geol. 2017, 393, 47–66. [Google Scholar] [CrossRef]
- Campbell, K.J.; Kinnear, S.; Thame, A. AUV technology for seabed characterization and geohazards assessment. Lead. Edge 2015, 34, 170–178. [Google Scholar] [CrossRef]
- Jakobsson, M.; Gyllencreutz, R.; Mayer, L.A.; Dowdeswell, J.A.; Canals, M.; Todd, B.J.; Dowdeswell, E.K.; Hogan, K.A.; Larter, R.D. Mapping submarine glacial landforms using acoustic methods. Geol. Soc. Lond. 2016, 46, 17–40. [Google Scholar] [CrossRef]
- Austin, J. The potential for Autonomous Underwater Gliders in large lake research. J. Great Lakes Res. 2013, 39, 8–13. [Google Scholar] [CrossRef]
- Villareal, T.A.; Wilson, C. A comparison of the Pac-X Trans-Pacific Wave Glider data and satellite data (MODIS, Aquarius, TRMM and VIIRS). PLoS ONE 2014, 9, e92280. [Google Scholar] [CrossRef] [PubMed]
- Dolman, S.J.; Green, M.; Simmonds, M.P. Marine renewable energy and cetaceans. In Report for Scientific Committee; Whale and Dolphin Conservation Society: Wiltshire, UK, 2007. [Google Scholar]
- Guinan, J.; McKeon, C.; O’Keefee, E.; Monteys, X.; Sacchetti, F.; Coughlan, M.; Aonghusa, C.N. INFOMAR data in the EMODnet geology data portal supports marine spatial planning and offshore energy development in the Irish offshore. Qt. J. Eng. Geol. Hyd. 2020, 51. [Google Scholar] [CrossRef]
- Cha, Y.H.; Jo, C.H.; Suh, J.H. Water bottom seismic refraction survey for engineering applications. Geosys. Eng. 2003, 6, 40–45. [Google Scholar] [CrossRef]
- Hamilton, E.L. Sound velocity as a function of depth in marine sediments. J. Acoust. Soc. Am. 1985, 78, 1348–1355. [Google Scholar] [CrossRef]
- Barr, F.J. New seismic technique is improving hydrocarbon recovery. J. Pet. Tech. 1996, 48, 592. [Google Scholar]
- Mitchell, S. Nodes improve seismic quality, cost. In The American Oil and Gas Report; AOGR: Derby, KS, USA, 2011. [Google Scholar]
- Summers, T.; Michell, S.; Barley, B.; Foster, M. Recent advances in the development and application of wide azimuth seismic technology. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 6 May 2010. [Google Scholar]
- Long, A.S.; Pramik, W.; Fromyr, E.; Laurain, R.; Page, C. Multi-azimuth and wide azimuth lessons for better seismic imaging in complex settings. ASEG Ext. Abstr. 2006, 1–5. [Google Scholar] [CrossRef]
- Moldoveanu, N.; Salama, A.; Lien, O.; Muyzert, E.; Pai, S.; Monk, D. Marine acquisition using autonomous marine vehicles: A field experiment. In Proceedings of the SEG Technical Program Expanded Abstracts, Denver, CO, USA, 26–31 October 2014; p. 5183. [Google Scholar]
- Moldoveanu, N.; Caprioli, P.; Kjellesvig, B.A.; Ishak, M.; Beecher, M.; Mulisheva, L.; Pai, S. Marine seismic acquisition with autonomous marine vehicles towing 3D sensor arrays. Lead. Edge 2017, 36, 558–565. [Google Scholar] [CrossRef]
- Palmer, D. The Generalized Reciprocal Method of Seismic Refraction Interpretation; Society of Exploration Geopysicists: Houston, TX, USA, 1980. [Google Scholar]
- Lankston, R.W. High-resolution refraction data acquisition and interpretation. In Geotechnical and Environmental Geophysics; Review and Tutorial; Ward, S.H., Ed.; Society of Exploration Geophysicists: Tulsa, OK, USA, 1990; Volume I, pp. 45–73. [Google Scholar]
- Ewing, J.; Leyden, R.; Ewing, E. Refraction shooting with expendable sonobuoys: Geological notes. AAPG Bull. 1969, 53, 174–181. [Google Scholar]
- Pei, Y.; Kan, G.; Zhang, L.; Huang, Y.; Liu, Z.; Liu, B.; Yan, K. Characteristics of source wavelets generated by two sparkers. J. Appl. Geoph. 2019, 170, 103819. [Google Scholar] [CrossRef]
- Shin, S.R.; Kim, Y.J. Development of high resolution seismic data acquisition system with shallow marine source and its field applications. J. Korean Soc. Min. Energy Res. Eng. 2005, 42, 454–464. [Google Scholar]
- Shin, S.R.; Kim, C.S.; Jo, C.H. A study on the shallow marine site survey using seismic reflection and refraction method. Mulli-Tamsa 2008, 11, 109–115. [Google Scholar]
- Kim, Y.; Cheong, S.; Koo, N.; Chun, J.; Kim, J.; Hwang, K.; Lee, H.; Heo, S.; Moon, K.; Jeong, C.; et al. Case study of the shallow seismic refraction survey using wave glider. Geoph. Geoph. Exp. 2017, 20, 43–48. [Google Scholar]
- Ha, J.; Ko, H.; Cho, H.; Chung, W.; Ahn, D.; Shin, S. A proposal of marine geophysical exploration techniques for offshore plant installation. J. Korean Soc. Mar. Eng. 2013, 37, 242–251. [Google Scholar]
- Hawkins, L.V. The reciprocal method of routine shallow seismic refraction investigations. Geophysics 1961, 26, 806–819. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Version | Wave Glider SV2 |
|---|---|
| Dimension | |
| 210 cm × 60 cm 40 cm × 191 cm 107 cm wide |
| Weight | 90 kg |
| Power | |
| 665 Wh Li-Ion 112 W (peak) |
| Water Speed | 0.5–1.6 knots |
| Station-Keeping | 40 m radius |
| WAS (Red Curved Line) | Seismic Reflection Survey (Light Blue Line) | |
|---|---|---|
| Sparker (SIG) | ||
| 2 kJ | 2 kJ |
| 2 s | 2 s |
| Recording | ||
| SonarWiz 6.0 | Mini-Trace |
| - Sampling interval | (Chesapeake Technology) 0.1 ms | (Geo Marine Survey Systems) 0.066 ms |
| Streamer | ||
| 3 m | 7 m |
| 10 | 24 |
| Parameters | |
|---|---|
| Time-Frequency Domain Noise Reduction | |
| 0–400 ms |
| 10–1000 Hz |
| Spike and Noise Burst Edit | |
| 3.0 |
| 5 samples |
| Bandpass filter | |
| Ormsby bandpass |
| 60–120–400–600 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheong, S.; Kim, Y.-J.; Chun, J.-H.; Kim, J.-K.; Huh, S. Integrated Offshore Seismic Survey Using an Unmanned Wave Glider. Energies 2021, 14, 297. https://doi.org/10.3390/en14020297
Cheong S, Kim Y-J, Chun J-H, Kim J-K, Huh S. Integrated Offshore Seismic Survey Using an Unmanned Wave Glider. Energies. 2021; 14(2):297. https://doi.org/10.3390/en14020297
Chicago/Turabian StyleCheong, Snons, Young-Jun Kim, Jong-Hwa Chun, Jung-Ki Kim, and Shin Huh. 2021. "Integrated Offshore Seismic Survey Using an Unmanned Wave Glider" Energies 14, no. 2: 297. https://doi.org/10.3390/en14020297
APA StyleCheong, S., Kim, Y.-J., Chun, J.-H., Kim, J.-K., & Huh, S. (2021). Integrated Offshore Seismic Survey Using an Unmanned Wave Glider. Energies, 14(2), 297. https://doi.org/10.3390/en14020297