
Effects of Positioning of Multi-Sensor Devices on Occupancy and Indoor Environmental Monitoring in Single-Occupant Offices





Abstract
:1. Introduction
- Investigating the effects of positioning of PIR sensors on the accuracy of occupancy detection by evaluating the factors such as distance from seated area and exposure to windows.
- Investigating the effects of sensor positioning on the accuracy of occupancy detection when fusing (combining) PIR sensor data.
- Investigating the effects of sensor positioning on the measurements of indoor environmental parameters, including temperature, relative humidity (RH), CO2 concentration, and illuminance.
2. Sensing Technologies for Occupancy and Environmental Monitoring
2.1. Occupancy Monitoring
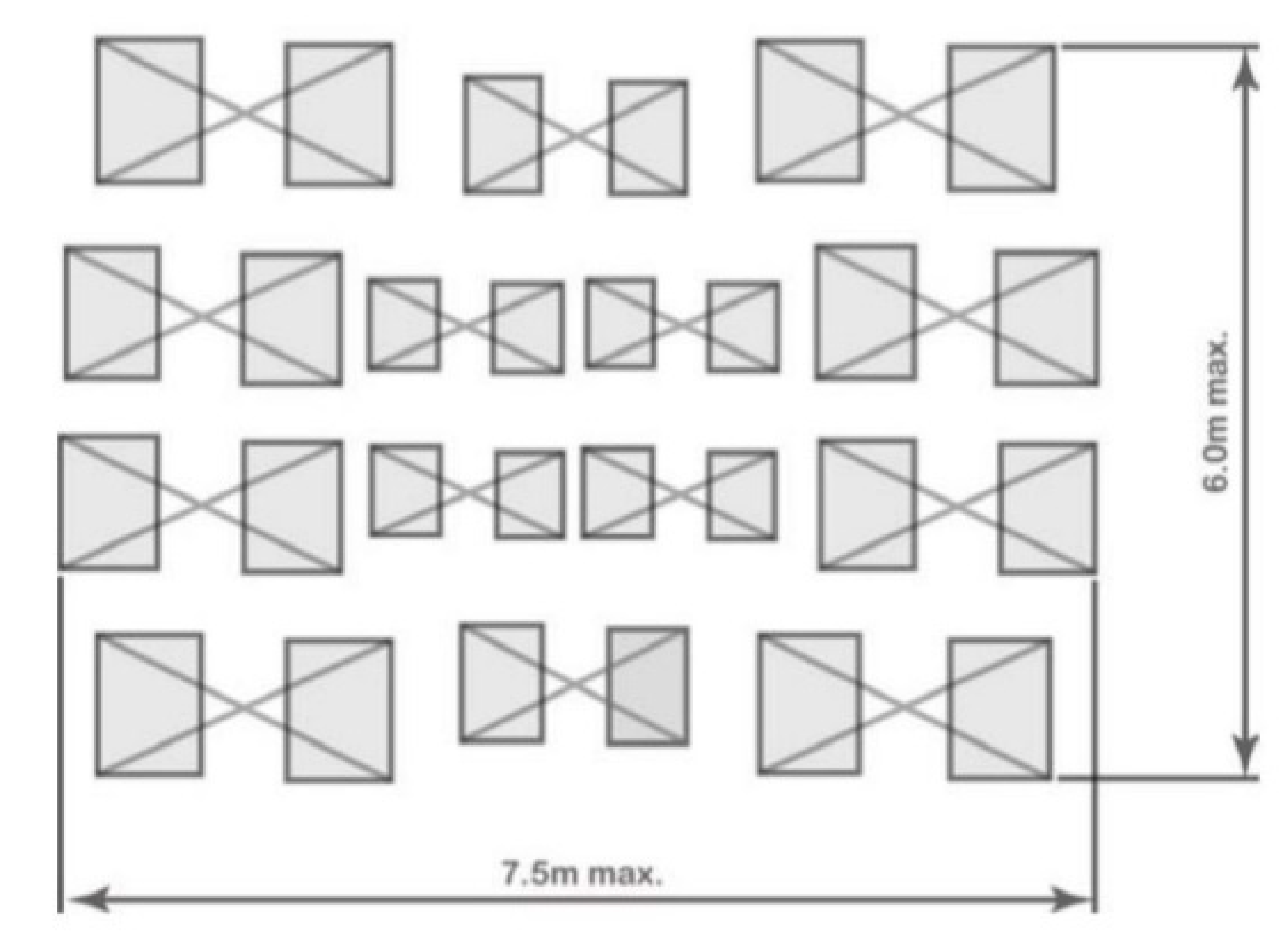
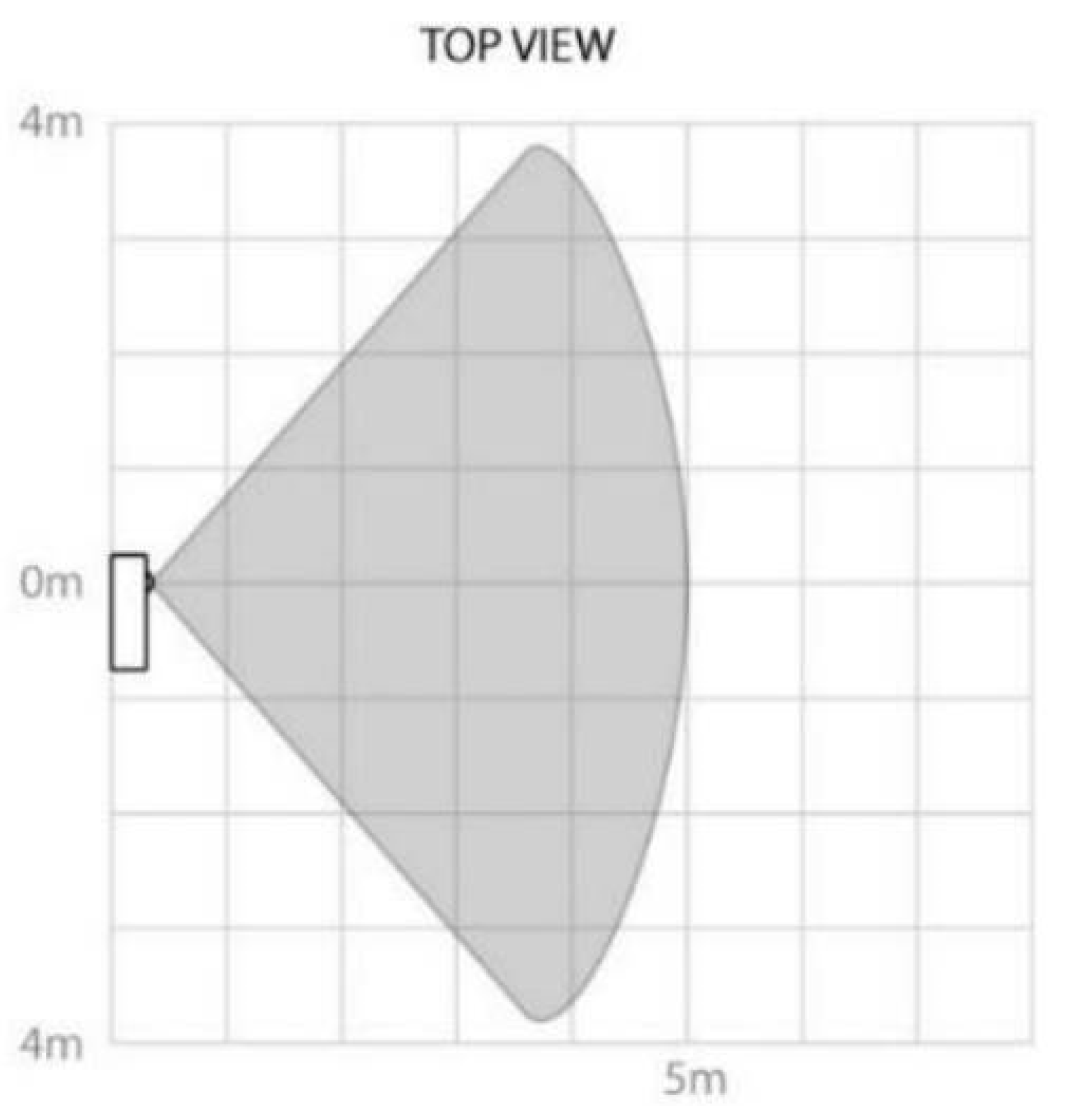
Quality of Occupancy Detection by PIR Sensors
2.2. Indoor Environmental Monitoring
3. Method
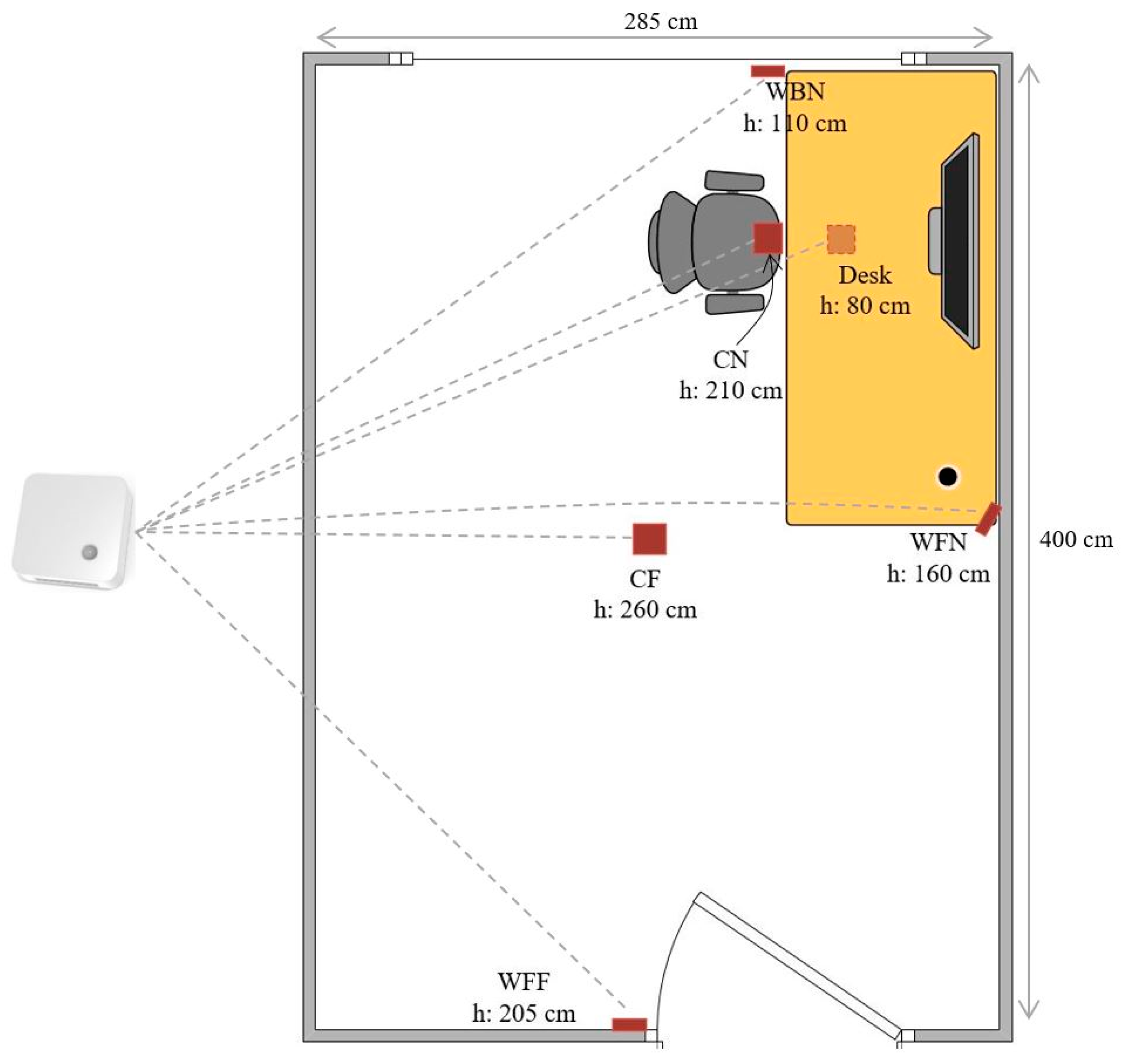
3.1. Data Collection
3.2. Data Pre-Processing
- if at least half of the PIR sensors (i.e., three out of six sensors) have detected occupant’s presence, and
- if one of these sensors is either the Desk or CF sensor.
3.3. Data Analysis
4. Results and Discussion
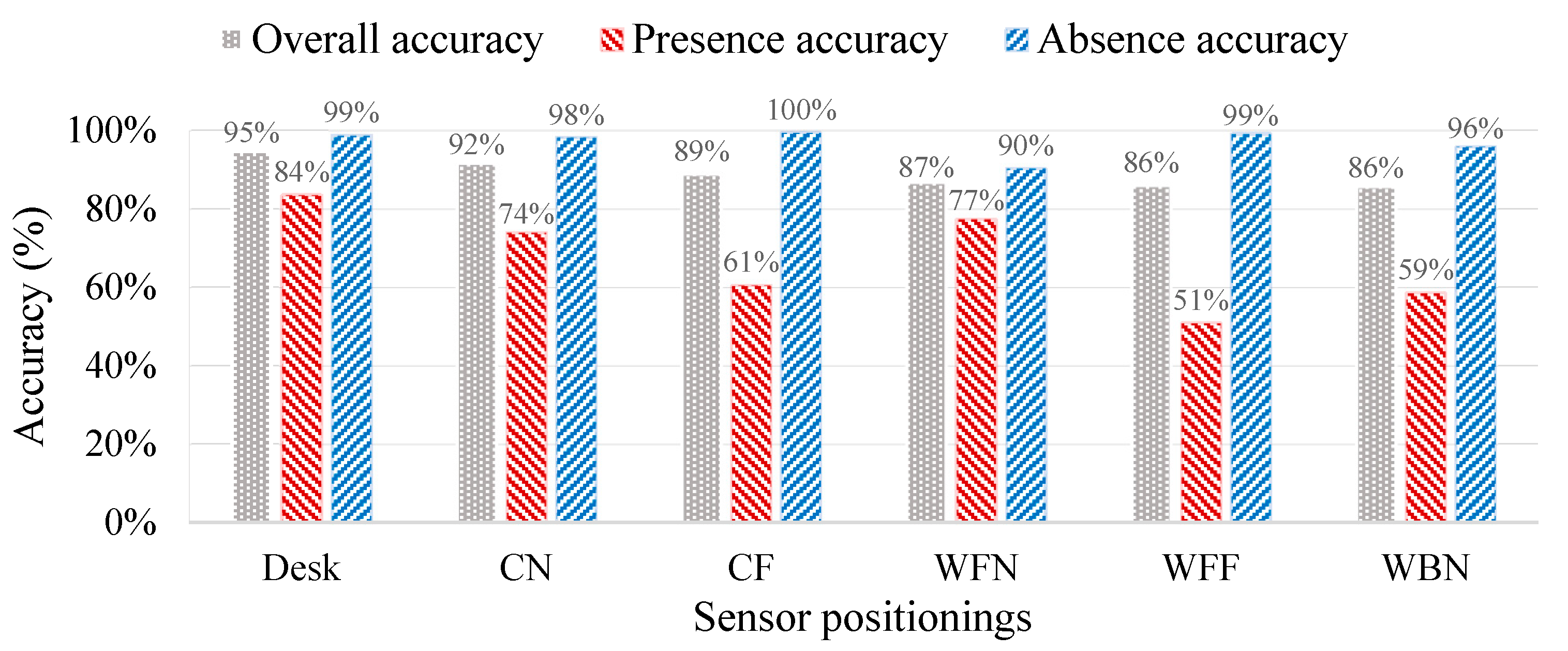
4.1. Effect of Positioning on the Accuracy of PIR Sensors
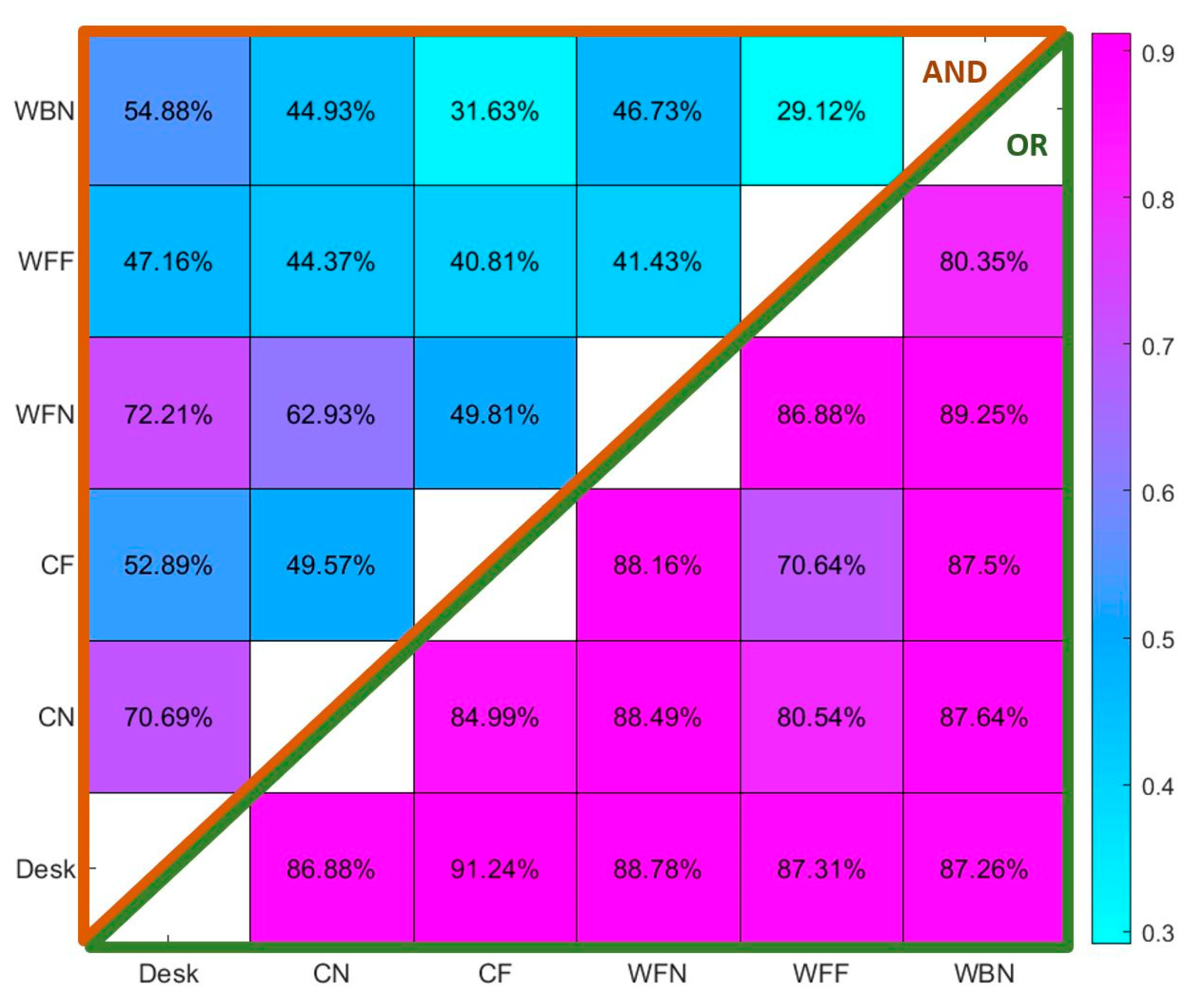
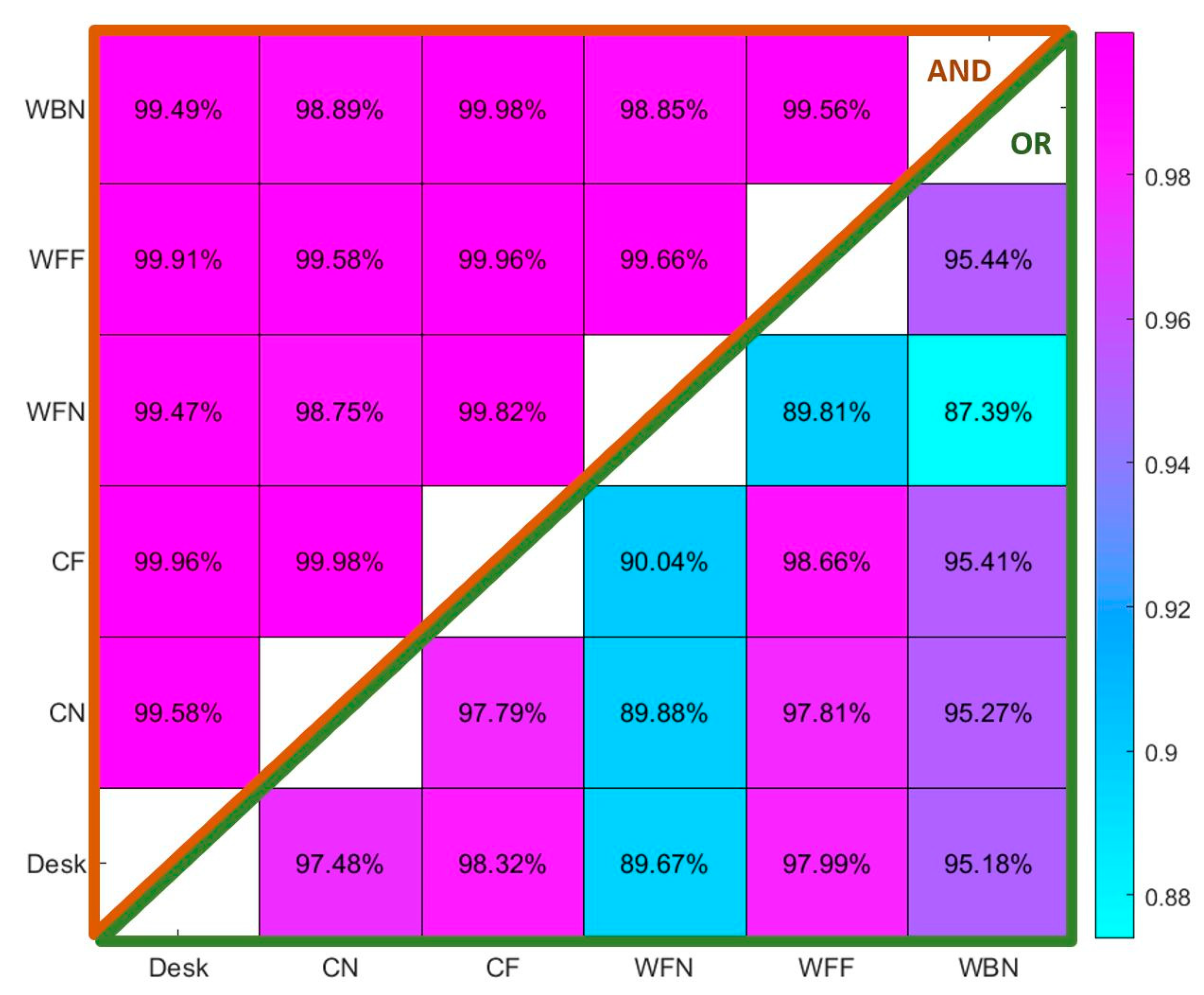
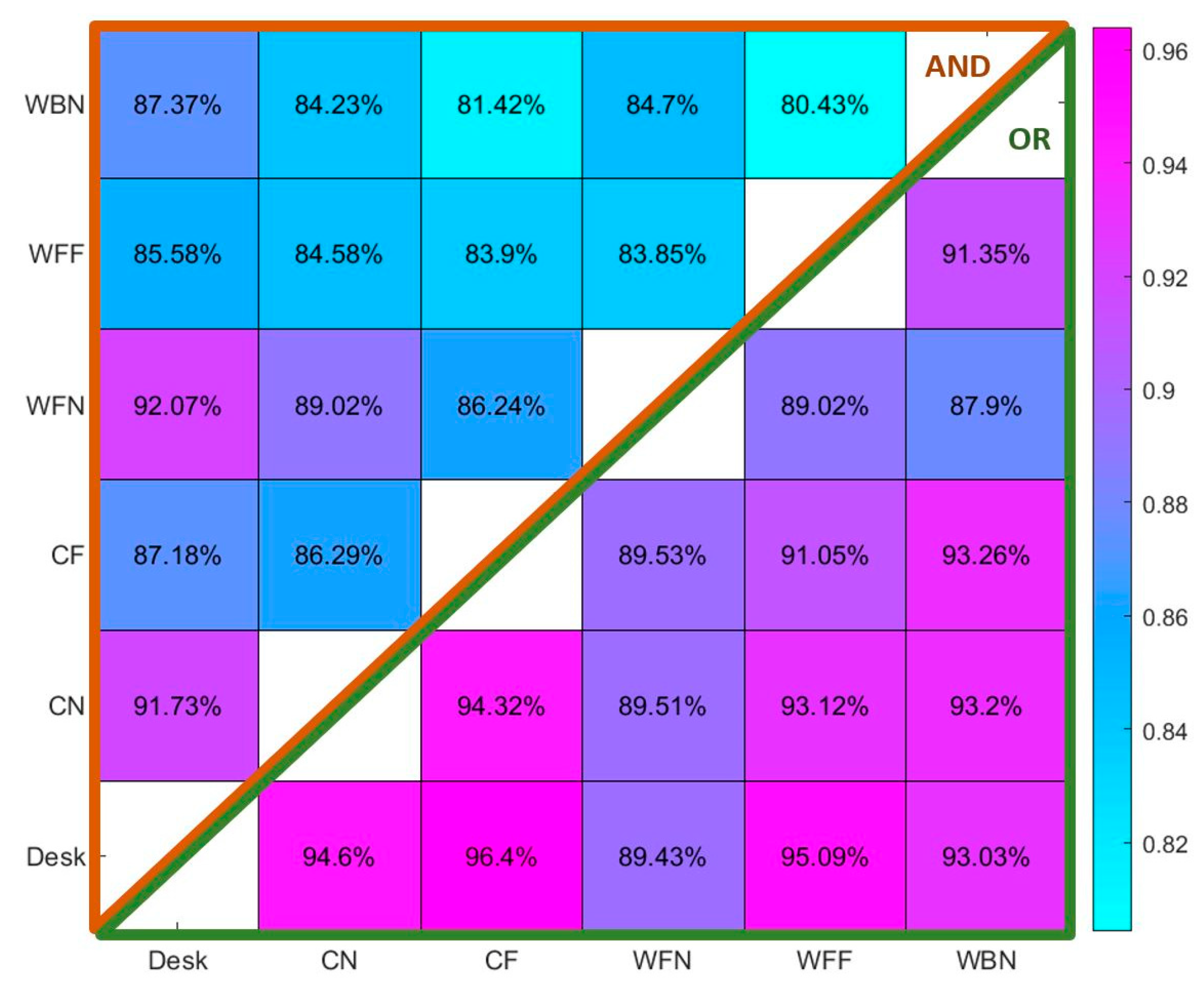
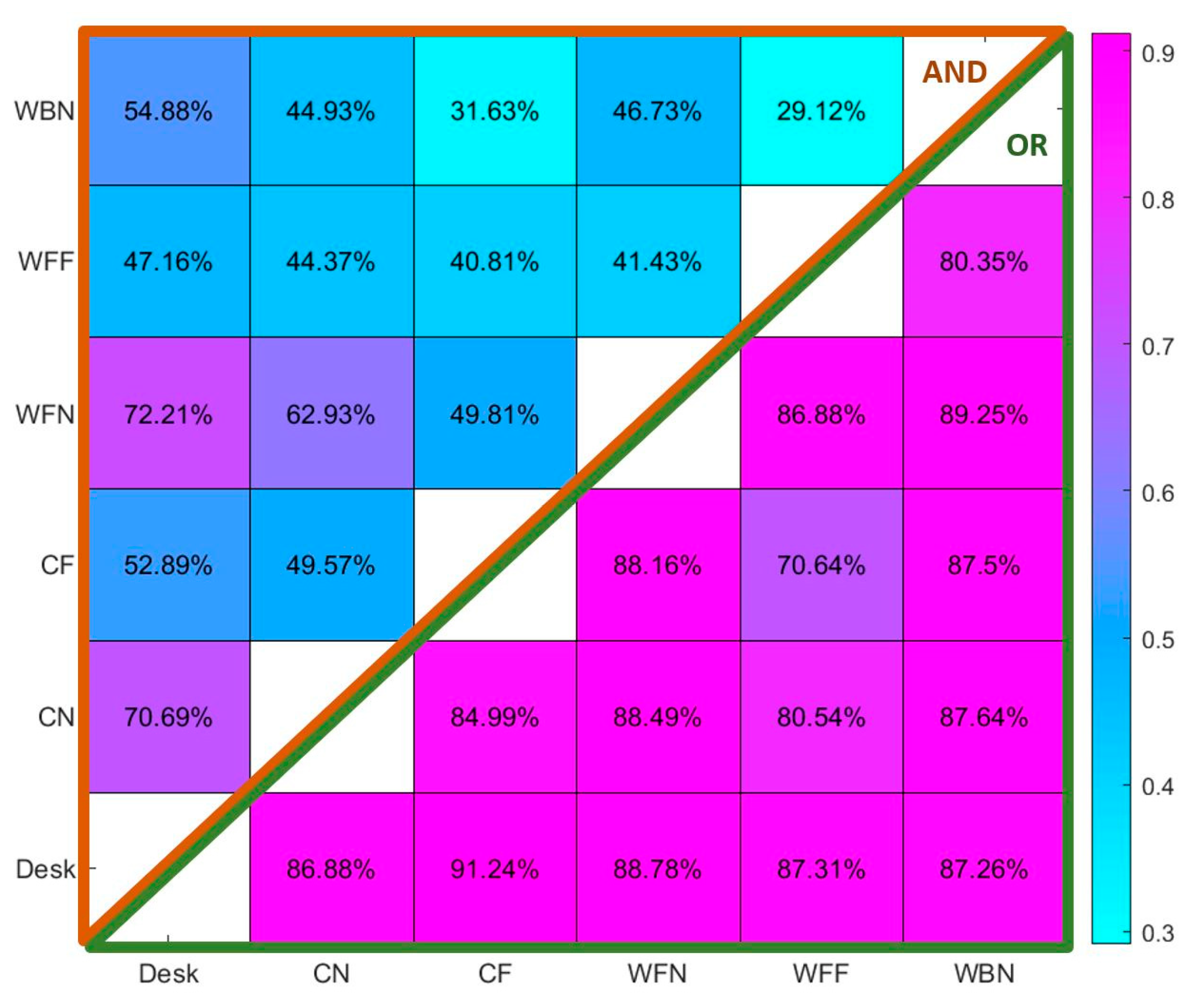
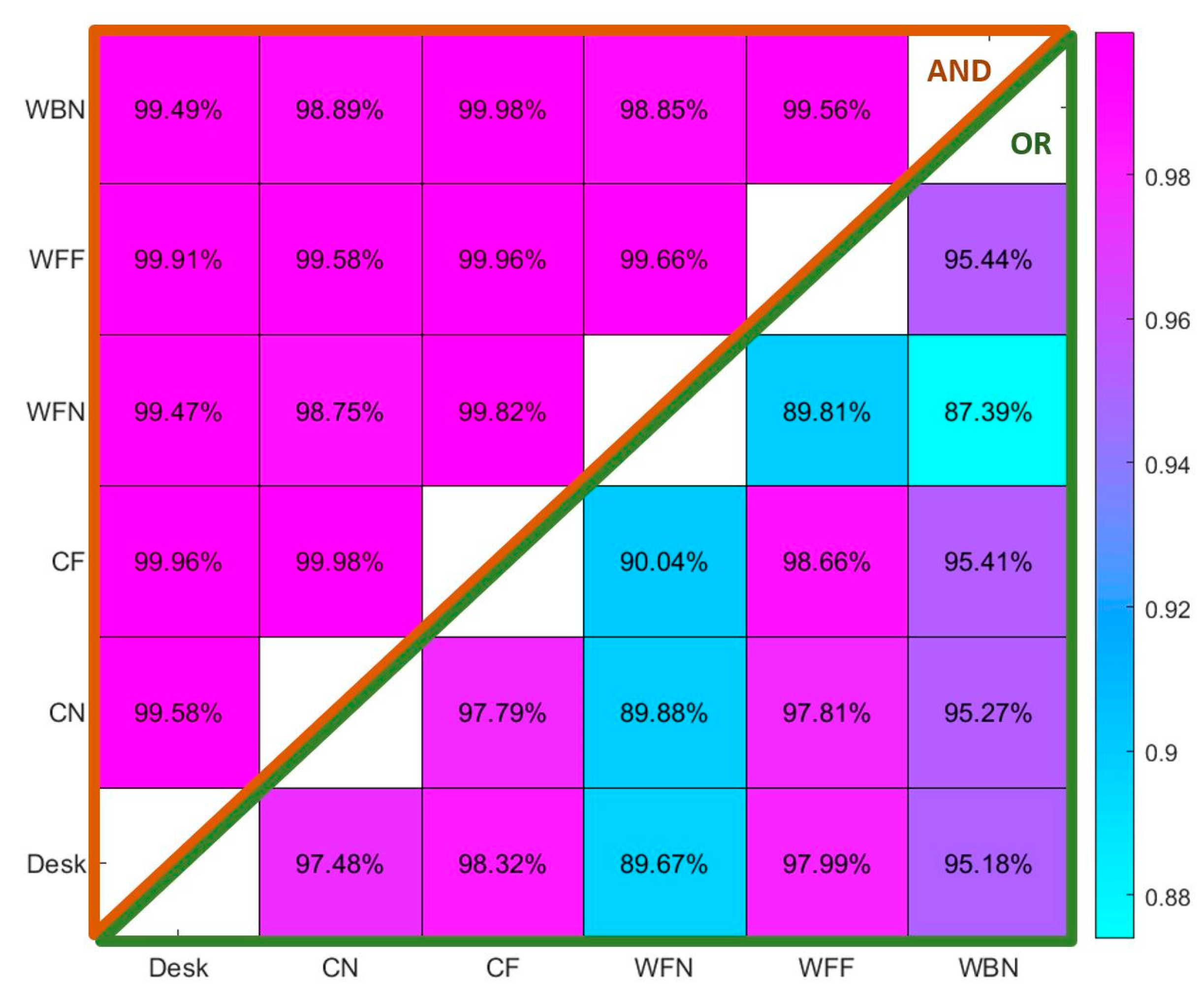
4.2. Fusion of PIR Sensors in Various Positions
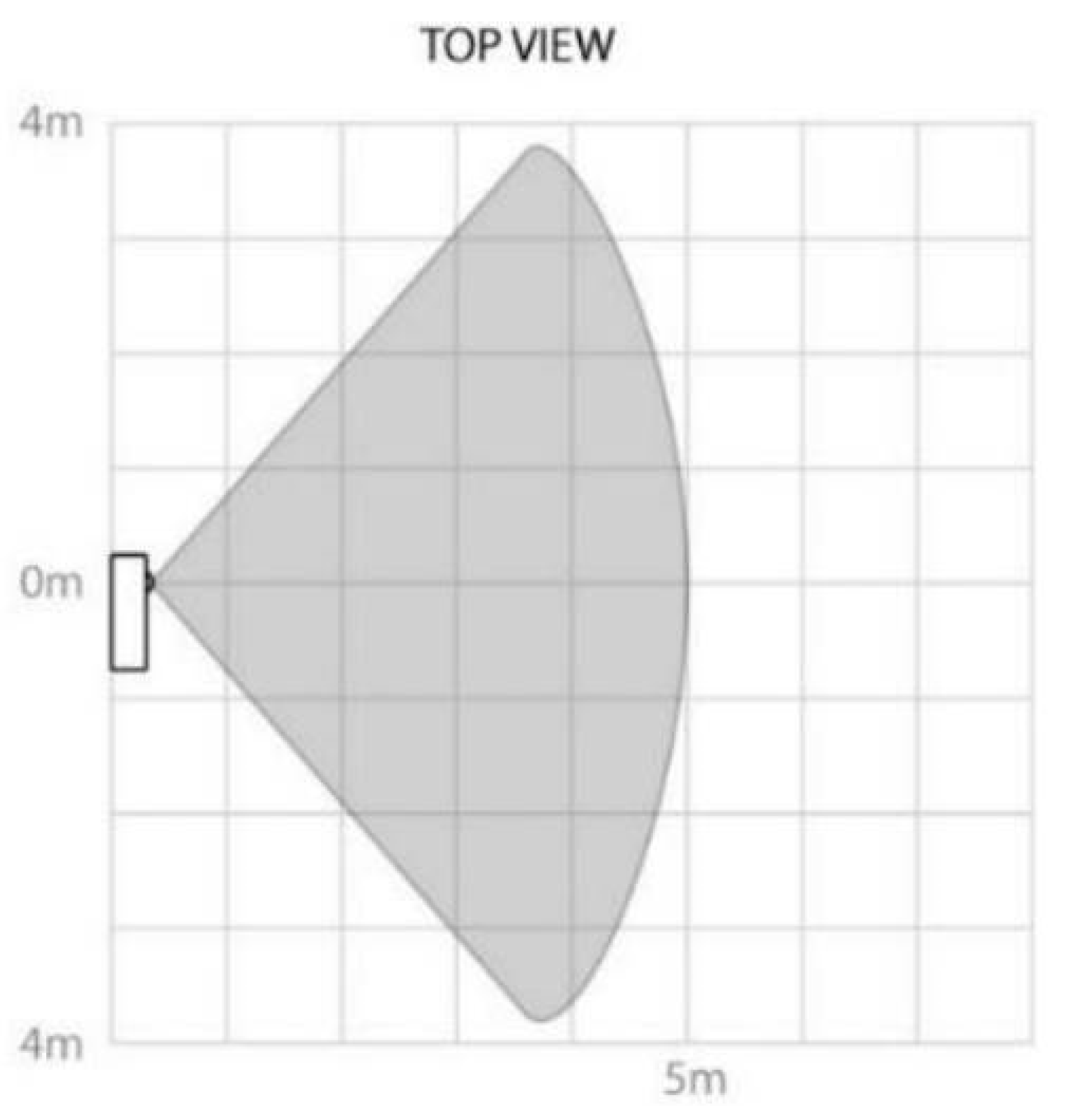
- The FOV is limited to the area in front of the desk.
- The FOV can be easily blocked with the chair when the occupants are not seated.
- It is positioned under the desk, which makes it susceptible to displacement by unintentional physical contact.
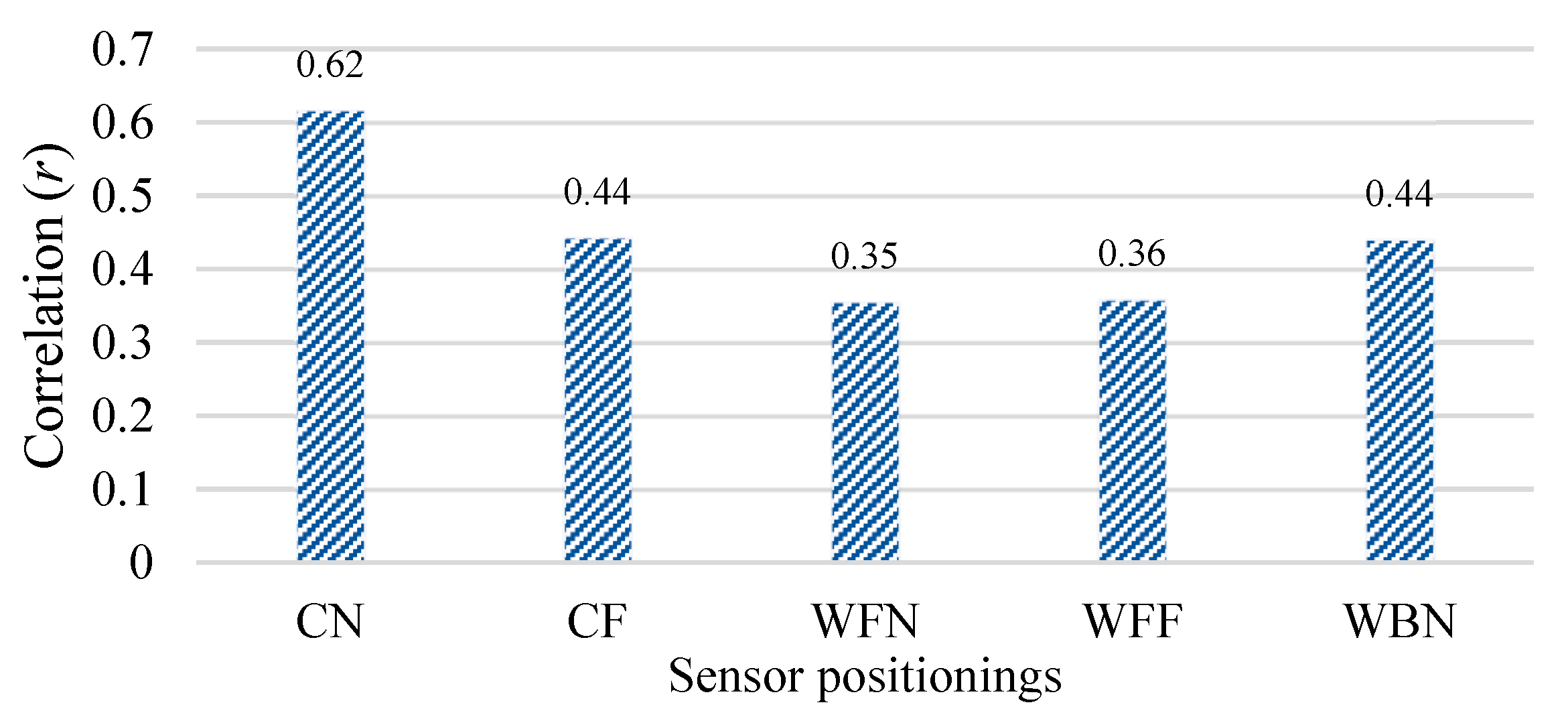
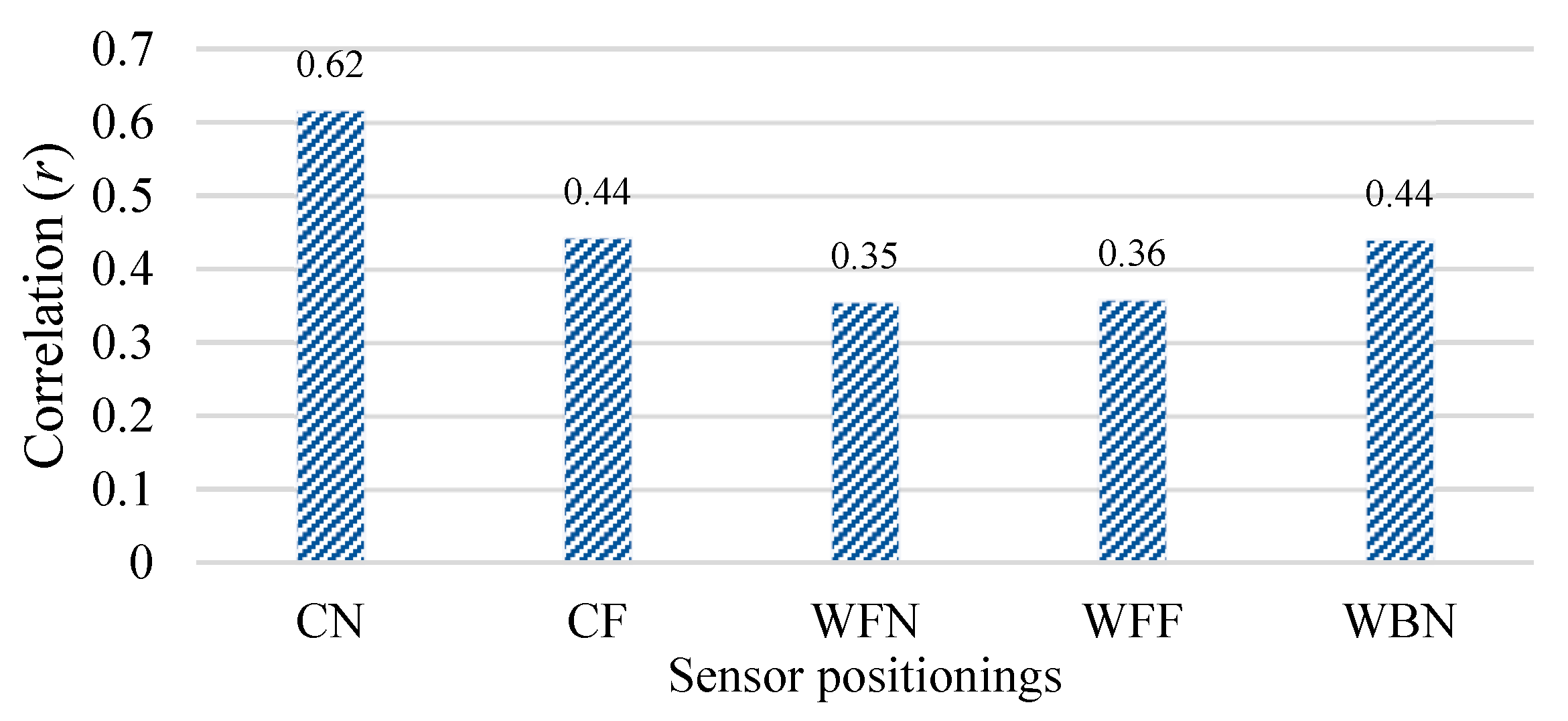
4.3. Occupancy Detection by CO2 Sensors in Various Positions
4.4. Effect of Sensor Positioning on Indoor Environmental Monitoring
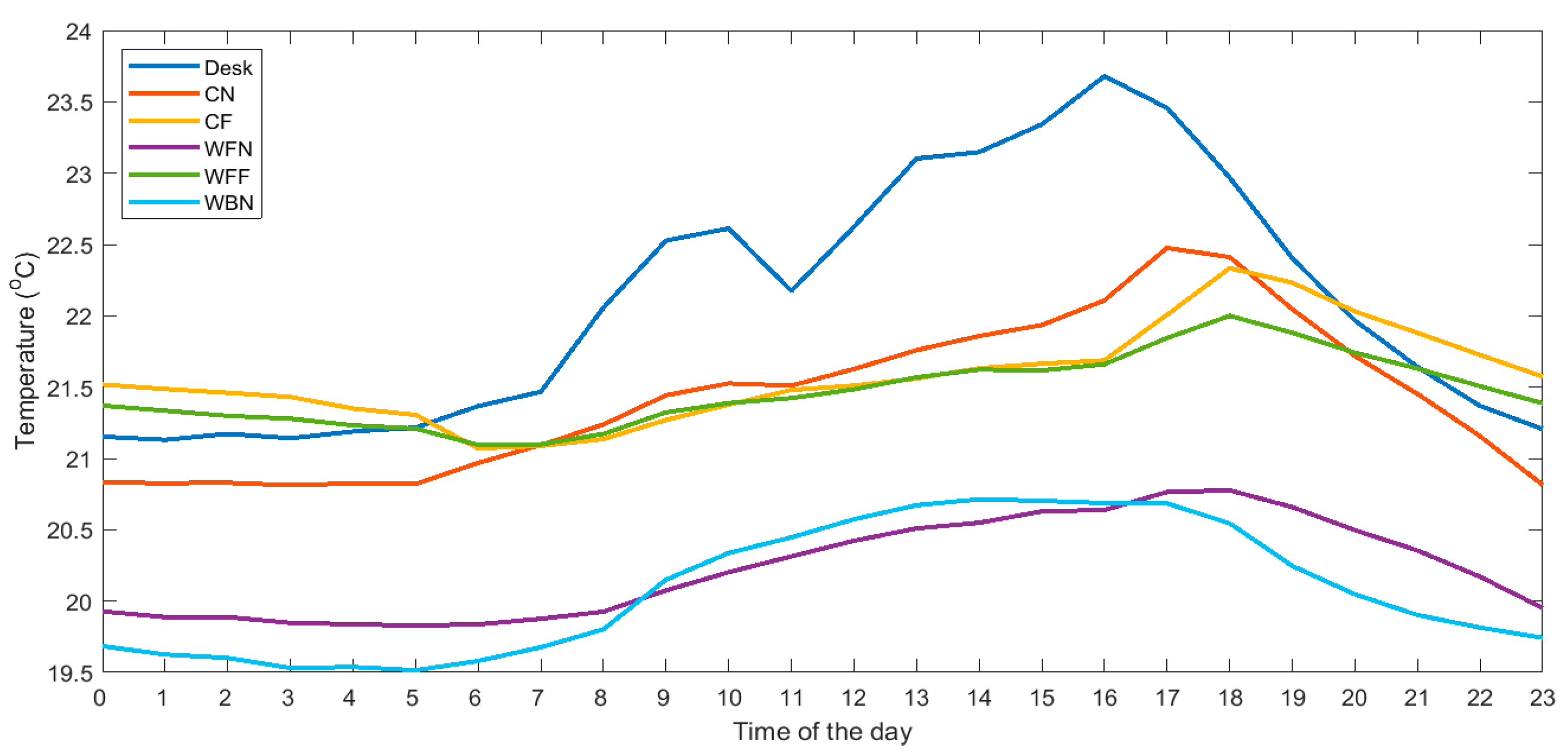
4.4.1. Temperature
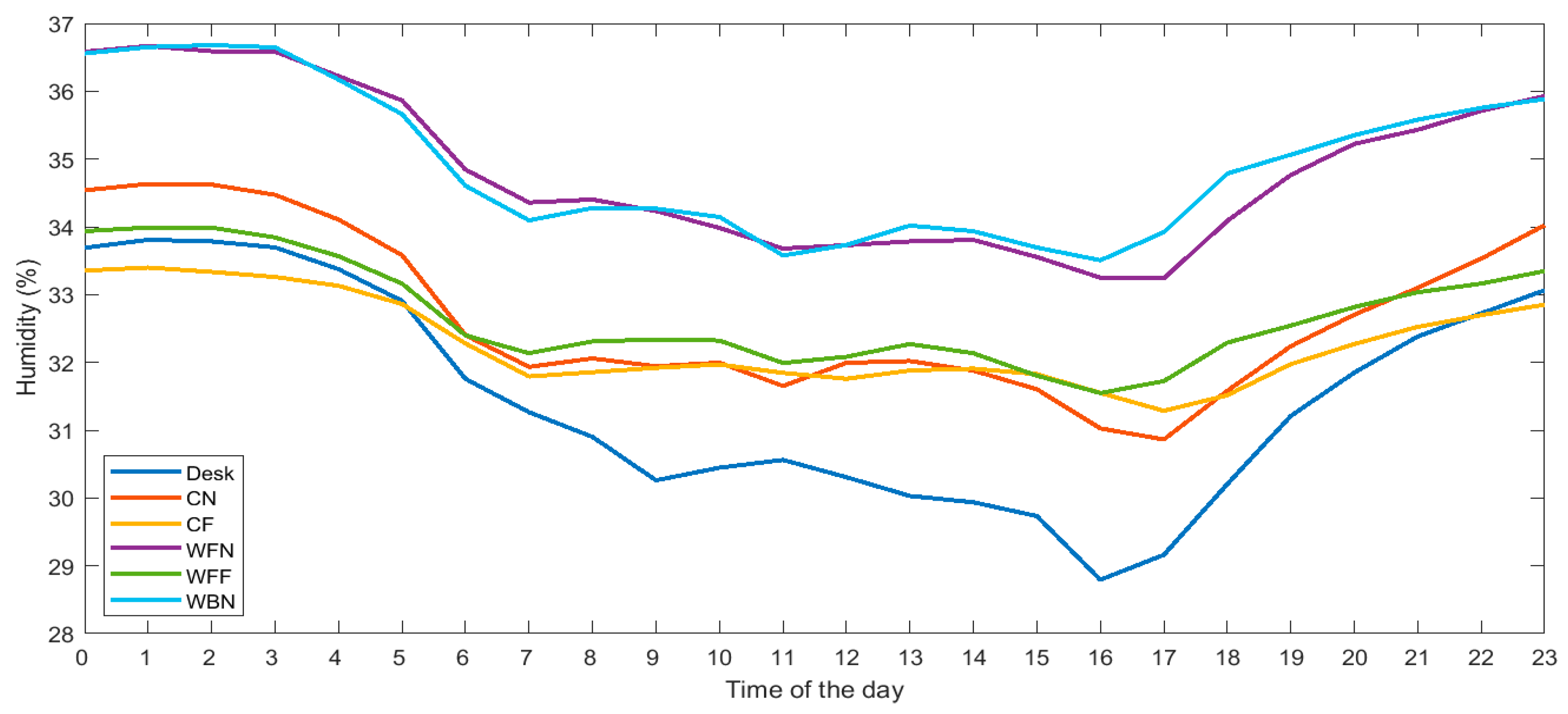
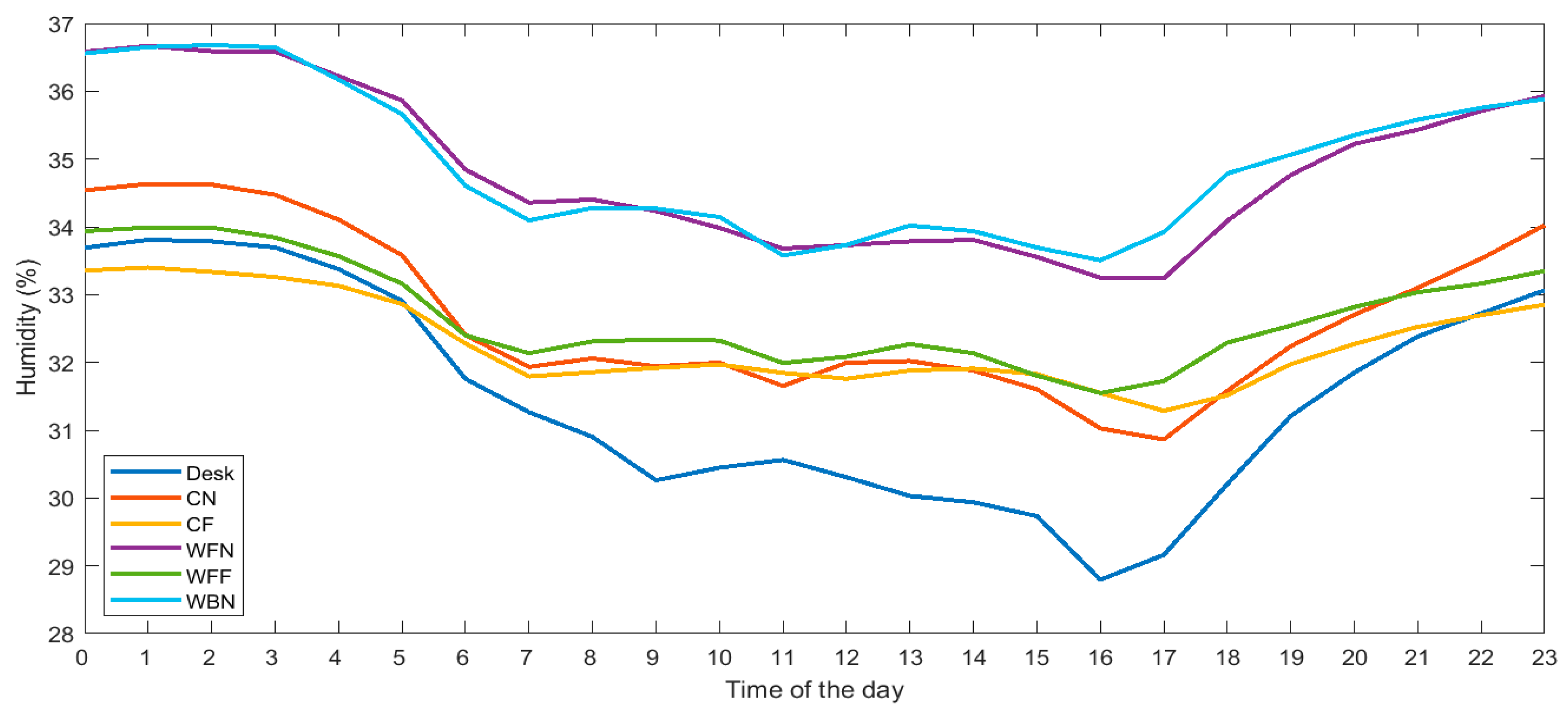
4.4.2. Relative Humidity (RH)
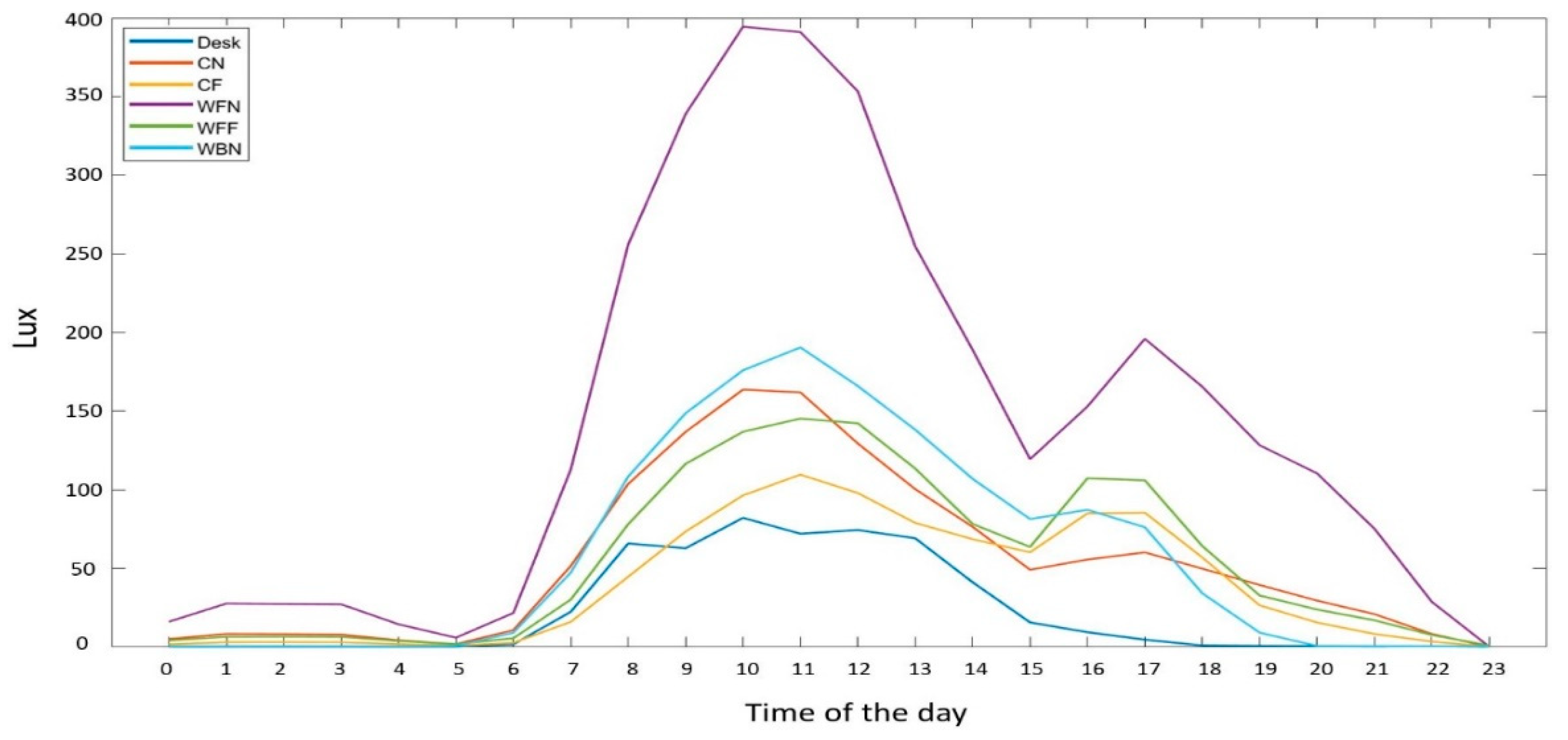
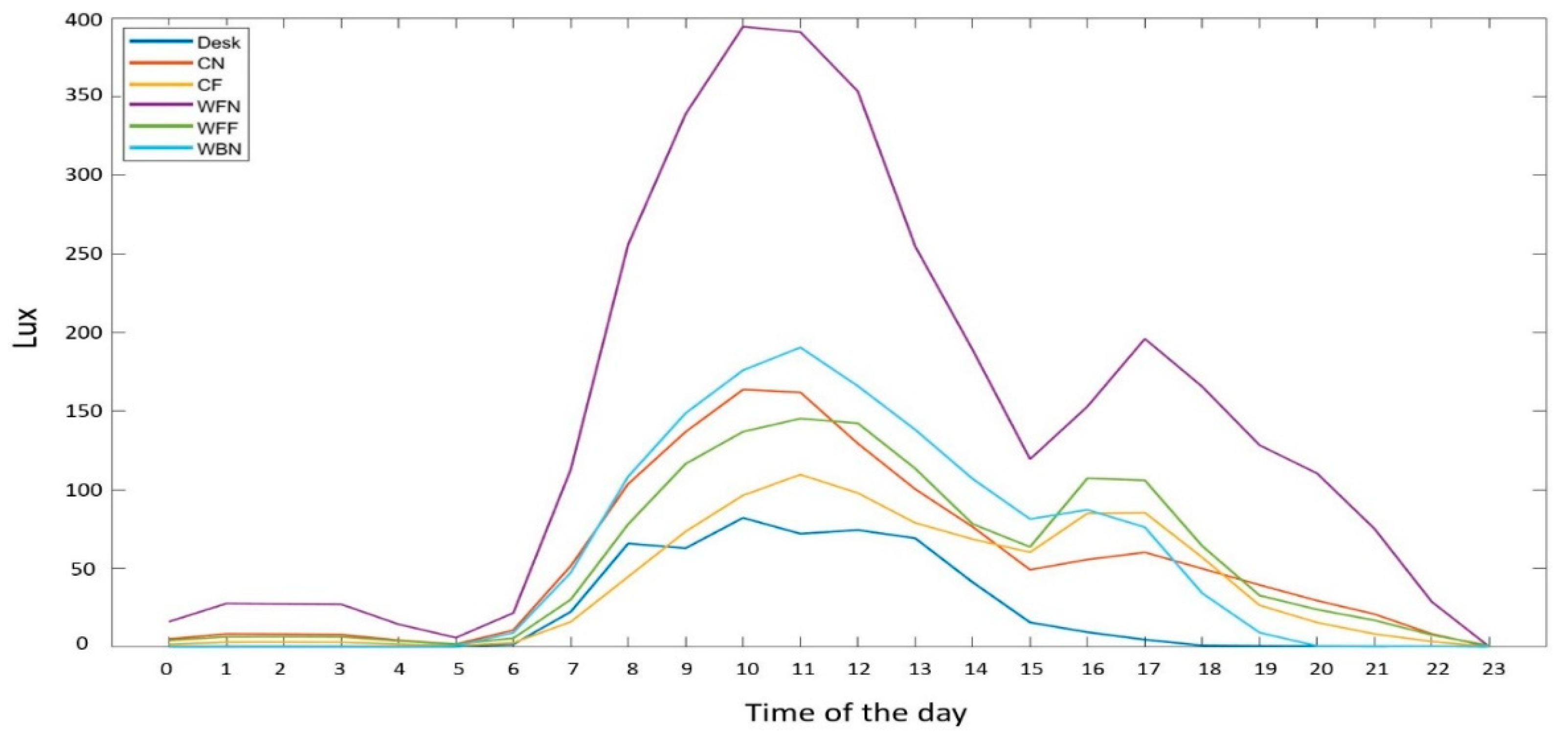
4.4.3. Illuminance
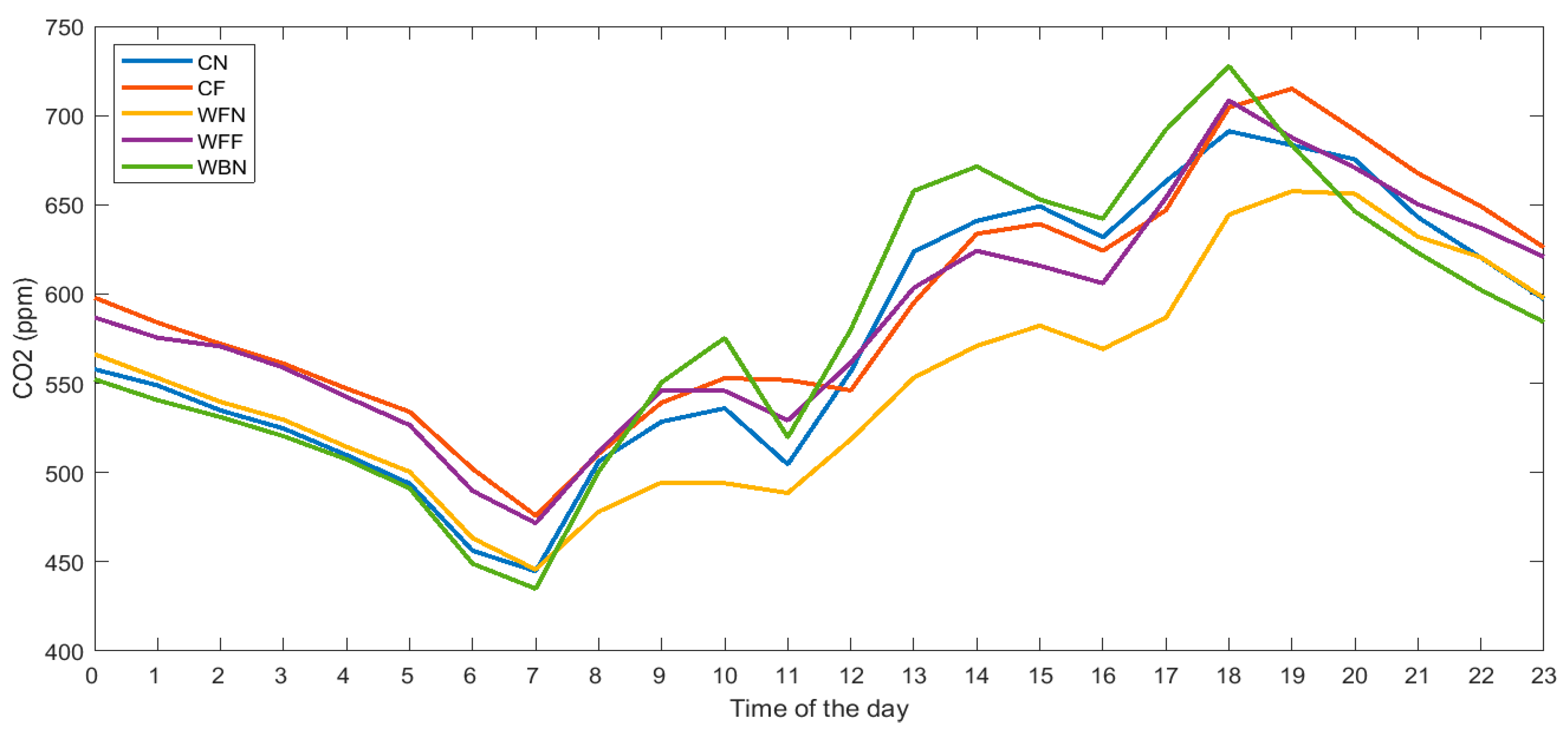
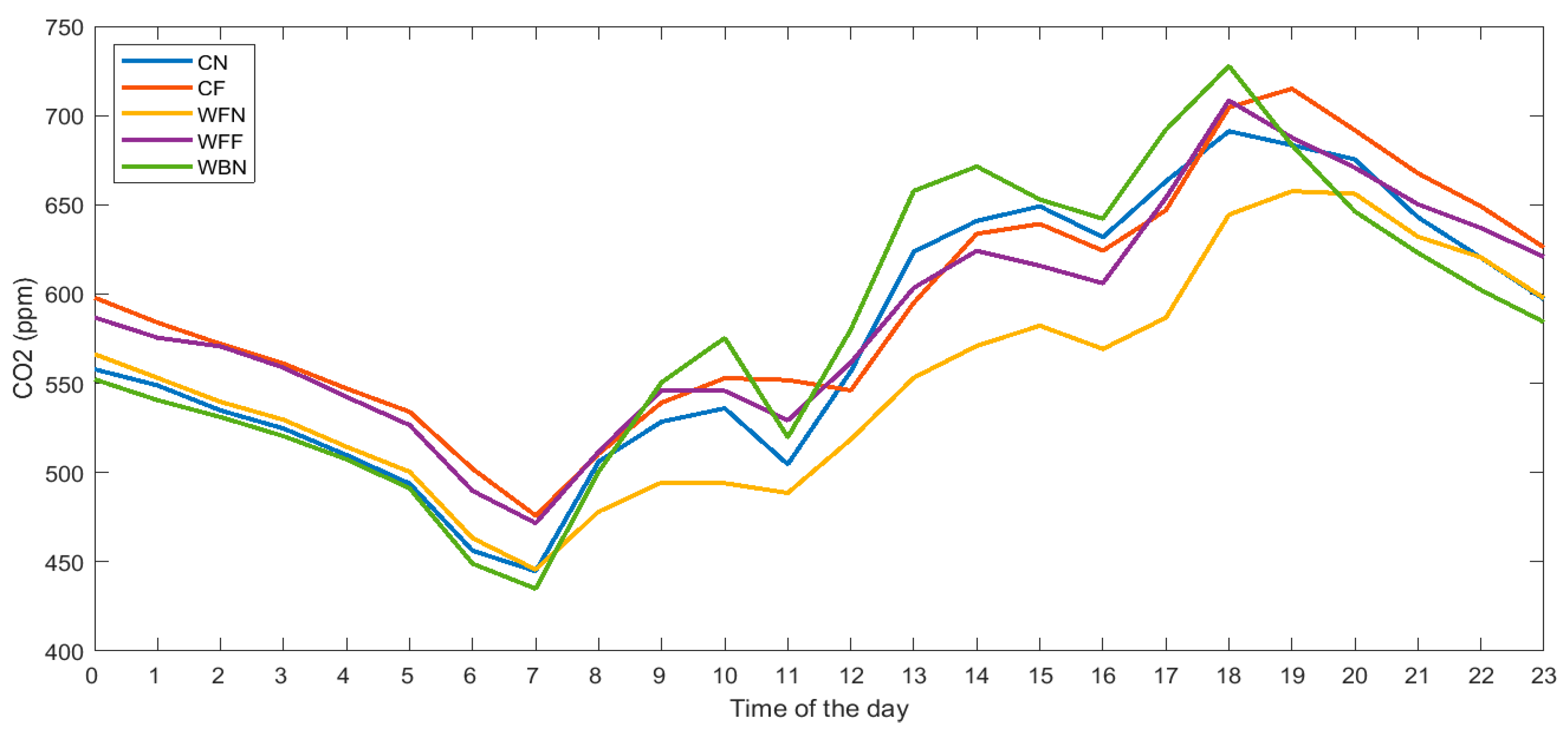
4.4.4. CO2 Concentration
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Sensors Specifications
Appendix A.1. PIR Sensor
Appendix A.2. CO2 Sensor
Appendix A.3. Temperature Sensor
Appendix A.4. Humidity Sensor
Appendix A.5. Light Sensor
References
- Park, E.; Del Pobil, A.P.; Kwon, S.J. The role of internet of things (IoT) in smart cities: Technology roadmap-oriented approaches. Sustainability 2018, 10, 1388. [Google Scholar] [CrossRef] [Green Version]
- Park, J.Y.; Ouf, M.M.; Gunay, B.; Peng, Y.; O’Brien, W.; Kjærgaard, M.B.; Nagy, Z. A critical review of field implementations of occupant-centric building controls. Build. Environ. 2019, 165, 106351. [Google Scholar] [CrossRef]
- Azar, E.; O’Brien, W.; Carlucci, S.; Hong, T.; Sonta, A.; Kim, J.; Andargie, M.; Abuimara, T.; El Asmar, M.; Jain, R.K.; et al. Simulation-aided occupant-centric building design: A critical review of tools, methods, and applications. Energy Build. 2020, 224, 110292. [Google Scholar] [CrossRef]
- Mahdavi, A.; Taheri, M. An ontology for building monitoring. J. Build. Perform. Simul. 2017, 10, 499–508. [Google Scholar] [CrossRef]
- Azizi, S.; Nair, G.; Rabiee, R.; Olofsson, T. Application of internet of things in academic buildings for space use efficiency using occupancy and booking data. Build. Environ. 2020, 186, 107355. [Google Scholar] [CrossRef] [PubMed]
- Azizi, S.; Nair, G.; Olofsson, T. Demand-controlled energy systems in commercial and institutional buildings: A review of methods and potentials. In Proceedings of the Eceee 2019 Summer Study, Belambra Presqu’île de Giens, France, 3–8 June 2019; pp. 1443–1450. [Google Scholar]
- Chaney, J.; Owens, E.H.; Peacock, A.D. An evidence based approach to determining residential occupancy and its role in demand response management. Energy Build. 2016, 125, 254–266. [Google Scholar] [CrossRef] [Green Version]
- Timm, S.; Deal, B.M. Effective or ephemeral? The role of energy information dashboards in changing occupant energy behaviors. Energy Res. Soc. Sci. 2016, 19, 11–20. [Google Scholar] [CrossRef]
- EU EPBD. Directive (EU) 2018/844 of the European Parliament and of the council of 30 May 2018. Off. J. Eur. Union 2018, L156/75. [Google Scholar]
- O’Brien, W.; Tahmasebi, F.; Andersen, R.K.; Azar, E.; Barthelmes, V.; Belafi, Z.D.; Berger, C.; Chen, D.; De Simone, M.; D’Oca, S.; et al. An international review of occupant-related aspects of building energy codes and standards. Build. Environ. 2020, 179, 106906. [Google Scholar] [CrossRef]
- Ahmad, M.W.; Mourshed, M.; Mundow, D.; Sisinni, M.; Rezgui, Y. Building energy metering and environmental monitoring—A state-of-the-art review and directions for future research. Energy Build. 2016, 120, 85–102. [Google Scholar] [CrossRef] [Green Version]
- Rabiee, R.; Karlsson, J. Multi-bernoulli tracking approach for occupancy monitoring of smart buildings using low-resolution infrared sensor array. Remote. Sens. 2021, 13, 3127. [Google Scholar] [CrossRef]
- ASHRAE. Standard 55: Thermal Environmental Conditions for Human Occupancy; ASHRAE: Washington, DC, USA, 2020. [Google Scholar]
- Legrand Putting a Stop to Energy Waste—Motion and Lighting Management Sensors; Design and Application Guide. Available online: http://www.legrand.com.mm/fileadmin/user_upload/PDF/Building_Systems/LMS/Catalogue_Motion_and_Lighting_Management_Sensors.pdf (accessed on 23 July 2020).
- Elsys, A. Best Practise Guide Executive Summary. Available online: https://www.elsys.se/en/ers/ (accessed on 15 January 2021).
- Lurton Occupancy/Vacancy Sensor Design and Application Guide. Available online: https://www.lutron.com/TechnicalDocumentLibrary/3683197.pdf (accessed on 23 July 2020).
- Gunay, H.B.; Fuller, A.F.; O’Brien, W.; Beausoleil-Morrison, I. Detecting occupants’ presence in office spaces: A case study. eSim 2016. [Google Scholar] [CrossRef]
- Shen, W.; Newsham, G.; Gunay, B. Leveraging existing occupancy-related data for optimal control of commercial office buildings: A review. Adv. Eng. Inform. 2017, 33, 230–242. [Google Scholar] [CrossRef] [Green Version]
- Ioannidis, D.; Zikos, S.; Krinidis, S.; Tryferidis, A.; Tzovaras, D.; Likothanassis, S. Occupancy-driven facility management and building performance analysis. Int. J. Sustain. Dev. Plan. 2017, 12, 1155–1167. [Google Scholar] [CrossRef]
- Ekwevugbe, T.; Brown, N.; Pakka, V.; Fan, D.; Pakka, V. Improved occupancy monitoring in non-domestic buildings. Sustain. Cities Soc. 2017, 30, 97–107. [Google Scholar] [CrossRef]
- Valks, B.; Arkesteijn, M.H.; Koutamanis, A.; Heijer, A.D. Towards a smart campus: Supporting campus decisions with internet of things applications. Build. Res. Inf. 2021, 49, 1–20. [Google Scholar] [CrossRef]
- Weyers, R.; Jang-Jaccard, J.; Moses, A.; Wang, Y.; Boulic, M.; Chitty, C.; Phipps, R.; Cunningham, C. Low-cost indoor air quality (IAQ) platform for healthier classrooms in New Zealand: Engineering issues. In Proceedings of the 4th Asia-Pacific World Congress on Computer Science and Engineering (APWC on CSE), Mana Island, Fiji, 10–12 December 2017; pp. 208–215. [Google Scholar] [CrossRef]
- Roozeboom, C.L.; Hill, B.E.; Hong, V.A.; Ahn, C.H.; Ng, E.J.; Yang, Y.; Kenny, T.W.; Hopcroft, M.A.; Pruitt, B.L. Multifunctional integrated sensors for multiparameter monitoring applications. J. Microelectromech. Syst. 2014, 24, 810–821. [Google Scholar] [CrossRef]
- Saralegui, U.; Antón, M.Á.; Arbelaitz, O.; Muguerza, J. Smart meeting room usage information and prediction by modelling occupancy profiles. Sensors 2019, 19, 353. [Google Scholar] [CrossRef] [Green Version]
- Pipattanasomporn, M.; Chitalia, G.; Songsiri, J.; Aswakul, C.; Pora, W.; Suwankawin, S.; Audomvongseree, K.; Hoonchareon, N. CU-BEMS, smart building electricity consumption and indoor environmental sensor datasets. Sci. Data 2020, 7, 241. [Google Scholar] [CrossRef]
- Kintner-Meyer, M. Opportunities of wireless sensors and controls for building operation. Energy Eng. 2005, 102, 27–48. [Google Scholar] [CrossRef]
- Gentile, N.; Laike, T.; Dubois, M.-C. Lighting control systems in individual offices rooms at high latitude: Measurements of electricity savings and occupants’ satisfaction. Sol. Energy 2016, 127, 113–123. [Google Scholar] [CrossRef]
- Fang, J.-S.; Hao, Q.; Brady, D.J.; Shankar, M.; Guenther, B.D.; Pitsianis, N.P.; Hsu, K.Y. Path-dependent human identification using a pyroelectric infrared sensor and fresnel lens arrays. Opt. Express 2006, 14, 609–624. [Google Scholar] [CrossRef] [PubMed]
- Yan, J.; Lou, P.; Li, R.; Hu, J.; Xiong, J. Research on the multiple factors influencing human identification based on pyroelectric infrared sensors. Sensors 2018, 18, 604. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, Z.; Jiang, C.; Xie, L. Building occupancy estimation and detection: A review. Energy Build. 2018, 169, 260–270. [Google Scholar] [CrossRef]
- Lin, H.-W.; Hong, T. On variations of space-heating energy use in office buildings. Appl. Energy 2013, 111, 515–528. [Google Scholar] [CrossRef] [Green Version]
- Salimi, S.; Hammad, A. Critical review and research roadmap of office building energy management based on occupancy monitoring. Energy Build. 2019, 182, 214–241. [Google Scholar] [CrossRef]
- Ngamakeur, K.; Yongchareon, S.; Yu, J.; Rehman, S.U. A survey on device-free indoor localization and tracking in the multi-resident environment. ACM Comput. Surv. 2020, 53, 1–29. [Google Scholar] [CrossRef]
- Yan, D.; Hong, T.; Dong, B.; Mahdavi, A.; D’Oca, S.; Gaetani, I.; Feng, X. IEA EBC Annex 66: Definition and simulation of occupant behavior in buildings. Energy Build. 2017, 156, 258–270. [Google Scholar] [CrossRef] [Green Version]
- Hoes, P.-J.; Hensen, J.; Loomans, M.; de Vries, B.; Bourgeois, D. User behavior in whole building simulation. Energy Build. 2009, 41, 295–302. [Google Scholar] [CrossRef] [Green Version]
- Hafer, M. Quantity and electricity consumption of plug load equipment on a university campus. Energy Effic. 2017, 10, 1013–1039. [Google Scholar] [CrossRef] [Green Version]
- Menezes, A.C.; Cripps, A.; Bouchlaghem, D.; Buswell, R. Predicted vs. actual energy performance of non-domestic buildings: Using post-occupancy evaluation data to reduce the performance gap. Appl. Energy 2012, 97, 355–364. [Google Scholar] [CrossRef] [Green Version]
- De Wilde, P. The gap between predicted and measured energy performance of buildings: A framework for investigation. Autom. Constr. 2014, 41, 40–49. [Google Scholar] [CrossRef]
- Szczurek, A.; Maciejewska, M.; Pietrucha, T. Occupancy determination based on time series of CO2 concentration, temperature and relative humidity. Energy Build. 2017, 147, 142–154. [Google Scholar] [CrossRef]
- Yang, J.; Santamouris, M.; Lee, S.E. Review of occupancy sensing systems and occupancy modeling methodologies for the application in institutional buildings. Energy Build. 2016, 121, 344–349. [Google Scholar] [CrossRef]
- Kjærgaard, M.B.; Sangogboye, F. Categorization framework and survey of occupancy sensing systems. Pervasive Mob. Comput. 2017, 38, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Rodiet, C.; Remy, B.; Degiovanni, A. Optimal wavelengths obtained from laws analogous to the Wien’s law for monospectral and bispectral methods, and general methodology for multispectral temperature measurements taking into account global transfer function including non-uniform emissivity of surfaces. Infrared Phys. Technol. 2016, 76, 444–454. [Google Scholar] [CrossRef]
- Gilani, S.; O’Brien, W. Review of current methods, opportunities, and challenges for in-situ monitoring to support occupant modelling in office spaces. J. Build. Perform. Simul. 2016, 10, 444–470. [Google Scholar] [CrossRef]
- Peng, Y.; Nagy, Z.; Schlüter, A. Temperature-preference learning with neural networks for occupant-centric building indoor climate controls. Build. Environ. 2019, 154, 296–308. [Google Scholar] [CrossRef]
- Nagy, Z.; Yong, F.Y.; Frei, M.; Schlueter, A. Occupant centered lighting control for comfort and energy efficient building operation. Energy Build. 2015, 94, 100–108. [Google Scholar] [CrossRef]
- Azizi, S.; Rabiee, R.; Nair, G.; Olofsson, T. Application of occupancy and booking information to optimize space and energy use in higher education institutions. E3S Web Conf. 2020, 172, 25010. [Google Scholar] [CrossRef]
- Surantha, N.; Wicaksono, W.R. Design of smart home security system using object recognition and PIR sensor. Procedia Comput. Sci. 2018, 135, 465–472. [Google Scholar] [CrossRef]
- Melfi, R.; Rosenblum, B.; Nordman, B.; Christensen, K. Measuring building occupancy using existing network infrastructure. In Proceedings of the 2011 International Green Computing Conference and Workshops, Orlando, FL, USA, 25–28 July 2011; pp. 1–8. [Google Scholar]
- Christensen, K.; Melfi, R.; Nordman, B.; Rosenblum, B.; Viera, R. Using existing network infrastructure to estimate building occupancy and control plugged-in devices in user workspaces. Int. J. Commun. Netw. Distrib. Syst. 2014, 12, 4–29. [Google Scholar] [CrossRef] [Green Version]
- Dong, B.; Andrews, B.; Lam, K.P.; Höynck, M.; Zhang, R.; Chiou, Y.-S.; Benitez, D. An information technology enabled sustainability test-bed (ITEST) for occupancy detection through an environmental sensing network. Energy Build. 2010, 42, 1038–1046. [Google Scholar] [CrossRef]
- Han, J.; Lee, E.; Cho, H.; Yoon, Y.; Lee, H.; Rhee, W. Improving the energy saving process with high-resolution data: A case study in a university building. Sensors 2018, 18, 1606. [Google Scholar] [CrossRef] [Green Version]
- Wyon, D.P. The effects of indoor air quality on performance and productivity. Indoor Air 2004, 14, 92–101. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; de Dear, R. Nonlinear relationships between individual IEQ factors and overall workspace satisfaction. Build. Environ. 2012, 49, 33–40. [Google Scholar] [CrossRef] [Green Version]
- Azizi, S.; Nair, G.; Olofsson, T. Analysing the house-owners’ perceptions on benefits and barriers of energy renovation in Swedish single-family houses. Energy Build. 2019, 198, 187–196. [Google Scholar] [CrossRef]
- O’Brien, W.; Wagner, A.; Schweiker, M.; Mahdavi, A.; Day, J.; Kjærgaard, M.B.; Carlucci, S.; Dong, B.; Tahmasebi, F.; Yan, D.; et al. Introducing IEA EBC annex 79: Key challenges and opportunities in the field of occupant-centric building design and operation. Build. Environ. 2020, 178, 106738. [Google Scholar] [CrossRef]
- Schell, M.; Int-Hout, D. Demand control ventilation using CO2. ASHRAE J. 2001, 43, 18–29. [Google Scholar]
- Park, J.; Loftness, V.; Aziz, A.; Wang, T.-H. Critical factors and thresholds for user satisfaction on air quality in office environments. Build. Environ. 2019, 164, 106310. [Google Scholar] [CrossRef]
- O’Neill, Z.D.; Li, Y.; Cheng, H.C.; Zhou, X.; Taylor, S.T. Energy savings and ventilation performance from CO2-based demand controlled ventilation: Simulation results from ASHRAE RP-1747 (ASHRAE RP-1747). Sci. Technol. Built Environ. 2019, 26, 257–281. [Google Scholar] [CrossRef] [Green Version]
- Lee, S. CO2-based demand-controlled ventilation and its implications for interior design. J. Inter. Des. 2012, 37, 19–36. [Google Scholar] [CrossRef]
- Meyn, S.; Surana, A.; Lin, Y.; Oggianu, S.M.; Narayanan, S.; Frewen, T.A. A sensor-utility-network method for estimation of occupancy in buildings. In Proceedings of the 48h IEEE Conference on Decision and Control (CDC) held jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 1494–1500. [Google Scholar]
- Hobson, B.; Lowcay, D.; Gunay, H.B.; Ashouri, A.; Newsham, G.R. Opportunistic occupancy-count estimation using sensor fusion: A case study. Build. Environ. 2019, 159, 106154. [Google Scholar] [CrossRef]
- Dong, B.; Prakash, V.; Feng, F.; O’Neill, Z. A review of smart building sensing system for better indoor environment control. Energy Build. 2019, 199, 29–46. [Google Scholar] [CrossRef]
- Cheng, C.-C.; Lee, D. Enabling smart air conditioning by sensor development: A review. Sensors 2016, 16, 2028. [Google Scholar] [CrossRef] [Green Version]
- Georgiou, O.; Raza, U. Low power wide area network analysis: Can LoRa scale? IEEE Wirel. Commun. Lett. 2017, 6, 162–165. [Google Scholar] [CrossRef] [Green Version]
- Gunay, H.; O’Brien, W.; Beausoleil-Morrison, I.; Bisaillon, P.; Shi, Z. Development and implementation of control-oriented models for terminal heating and cooling units. Energy Build. 2016, 121, 78–91. [Google Scholar] [CrossRef]
- Petersen, S.; Pedersen, T.H.; Nielsen, K.U.; Knudsen, M.D. Establishing an image-based ground truth for validation of sensor data-based room occupancy detection. Energy Build. 2016, 130, 787–793. [Google Scholar] [CrossRef]
- Rabiee, R. Signal Processing for Cooperative Cognitive Radio Networks; Nanyang Technological University: Singapore, 2020. [Google Scholar]
- Luo, J.; He, X. A soft-hard combination decision fusion scheme for a clustered distributed detection system with multiple sensors. Sensors 2018, 18, 4370. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- ELSYS Sensor Datasheet. 2019. Available online: https://elsys.se/public/datasheets/ (accessed on 26 September 2021).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
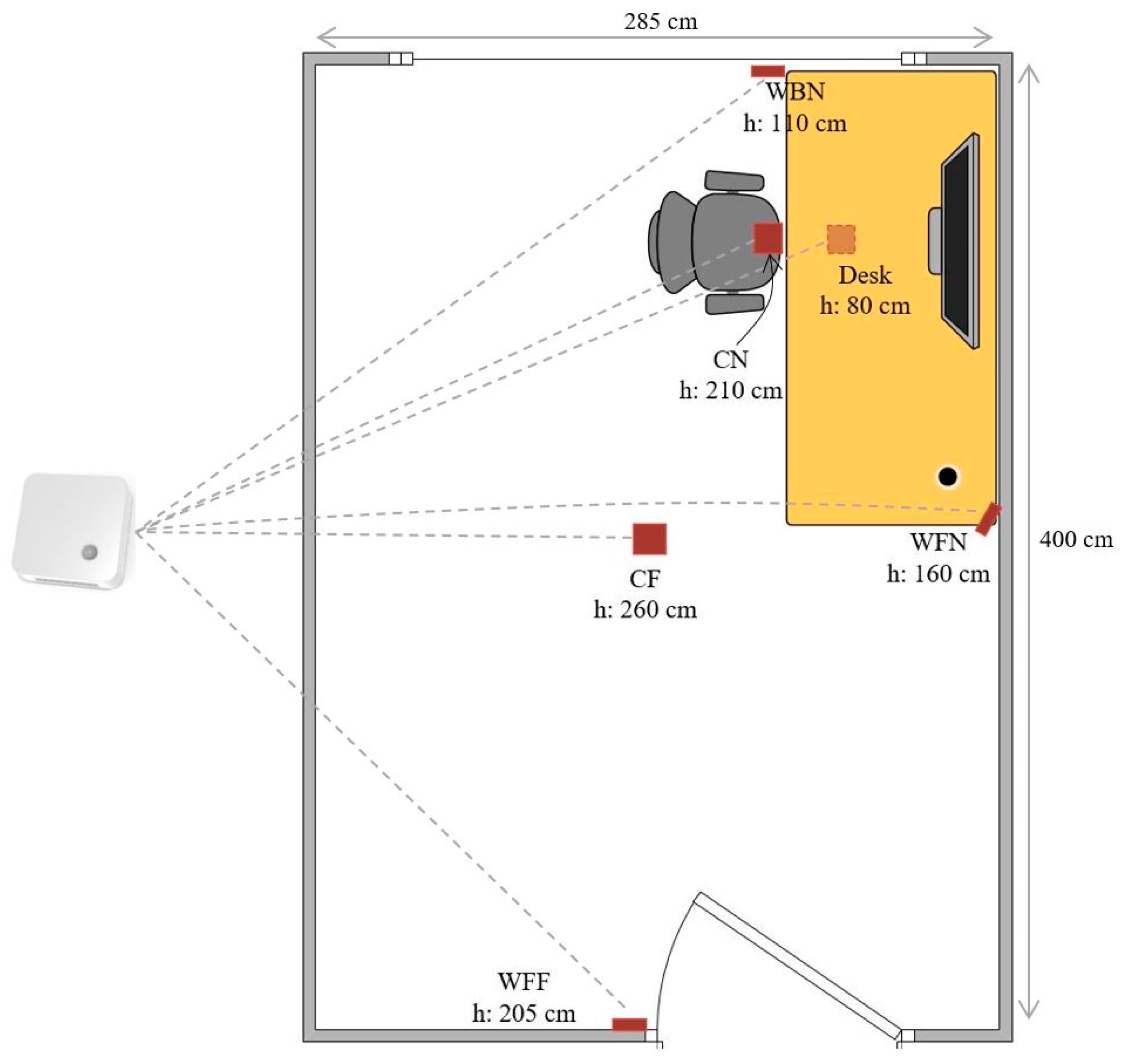
| Sensor Position | Desk | CN | CF | WFN | WFF | WBN |
|---|---|---|---|---|---|---|
| Distance (cm) | 50 | 80 | 170 | 110 | 300 | 90 |
| Accuracy of Presence Detection | 84% | 74% | 61% | 77% | 51% | 59% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azizi, S.; Rabiee, R.; Nair, G.; Olofsson, T. Effects of Positioning of Multi-Sensor Devices on Occupancy and Indoor Environmental Monitoring in Single-Occupant Offices. Energies 2021, 14, 6296. https://doi.org/10.3390/en14196296
Azizi S, Rabiee R, Nair G, Olofsson T. Effects of Positioning of Multi-Sensor Devices on Occupancy and Indoor Environmental Monitoring in Single-Occupant Offices. Energies. 2021; 14(19):6296. https://doi.org/10.3390/en14196296
Chicago/Turabian StyleAzizi, Shoaib, Ramtin Rabiee, Gireesh Nair, and Thomas Olofsson. 2021. "Effects of Positioning of Multi-Sensor Devices on Occupancy and Indoor Environmental Monitoring in Single-Occupant Offices" Energies 14, no. 19: 6296. https://doi.org/10.3390/en14196296
APA StyleAzizi, S., Rabiee, R., Nair, G., & Olofsson, T. (2021). Effects of Positioning of Multi-Sensor Devices on Occupancy and Indoor Environmental Monitoring in Single-Occupant Offices. Energies, 14(19), 6296. https://doi.org/10.3390/en14196296