
An Enhanced Distributed Voltage Regulation Scheme for Radial Feeder in Islanded Microgrid



 ,
, 
Abstract
:1. Introduction
- An enhanced distributed control scheme is presented, which can be used for a limited number of grid-forming nodes;
- A distributed secondary control layer is employed to restore the load voltage and frequency deviations. Modeling and analysis of an autonomous operation of inverter-based MG being verified through stability analysis using system-wide mathematical small-signal models;
- MATLAB/Simulink and experimental results are discussed with a comparison of conventional control schemes under load disturbances.
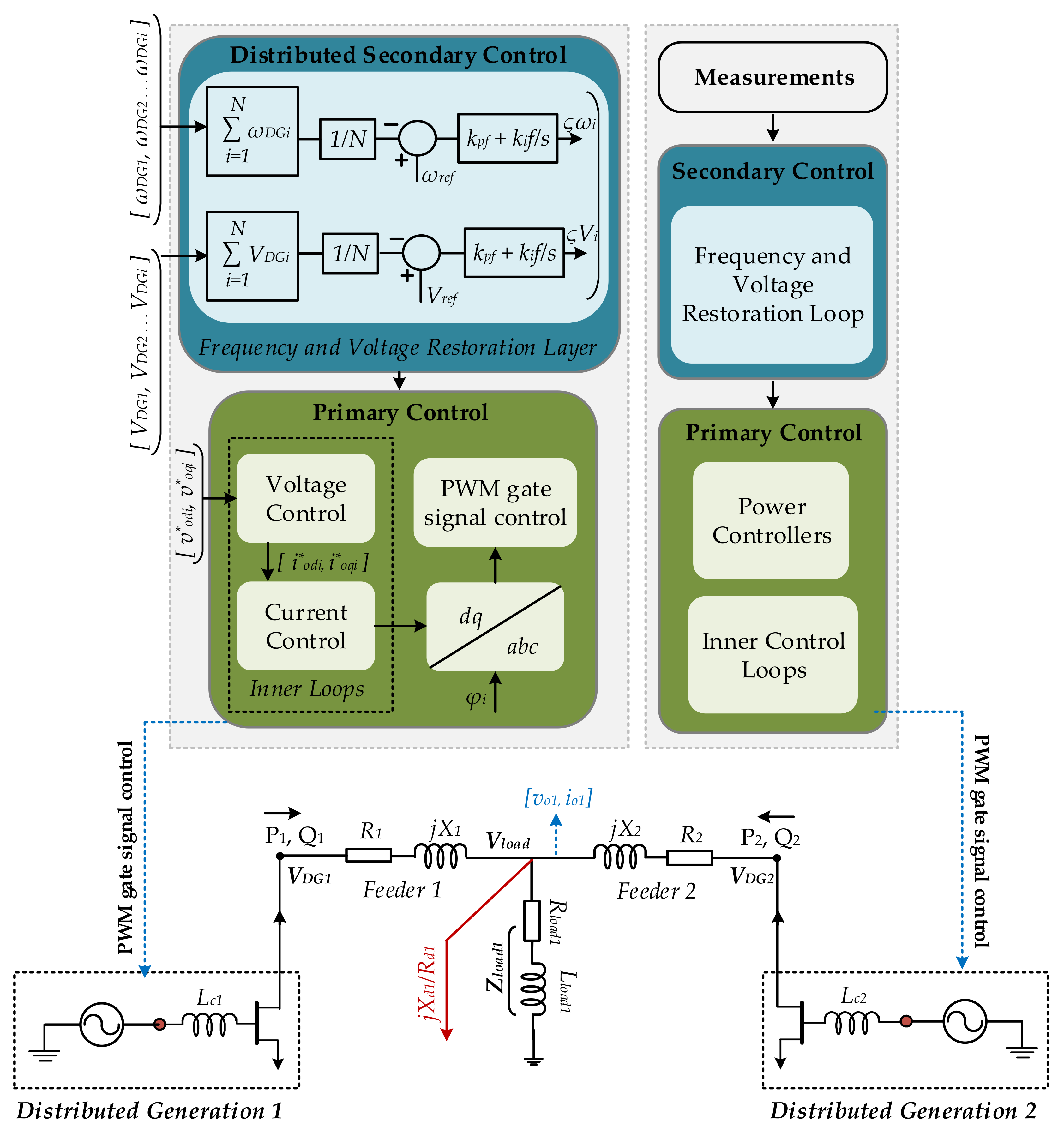
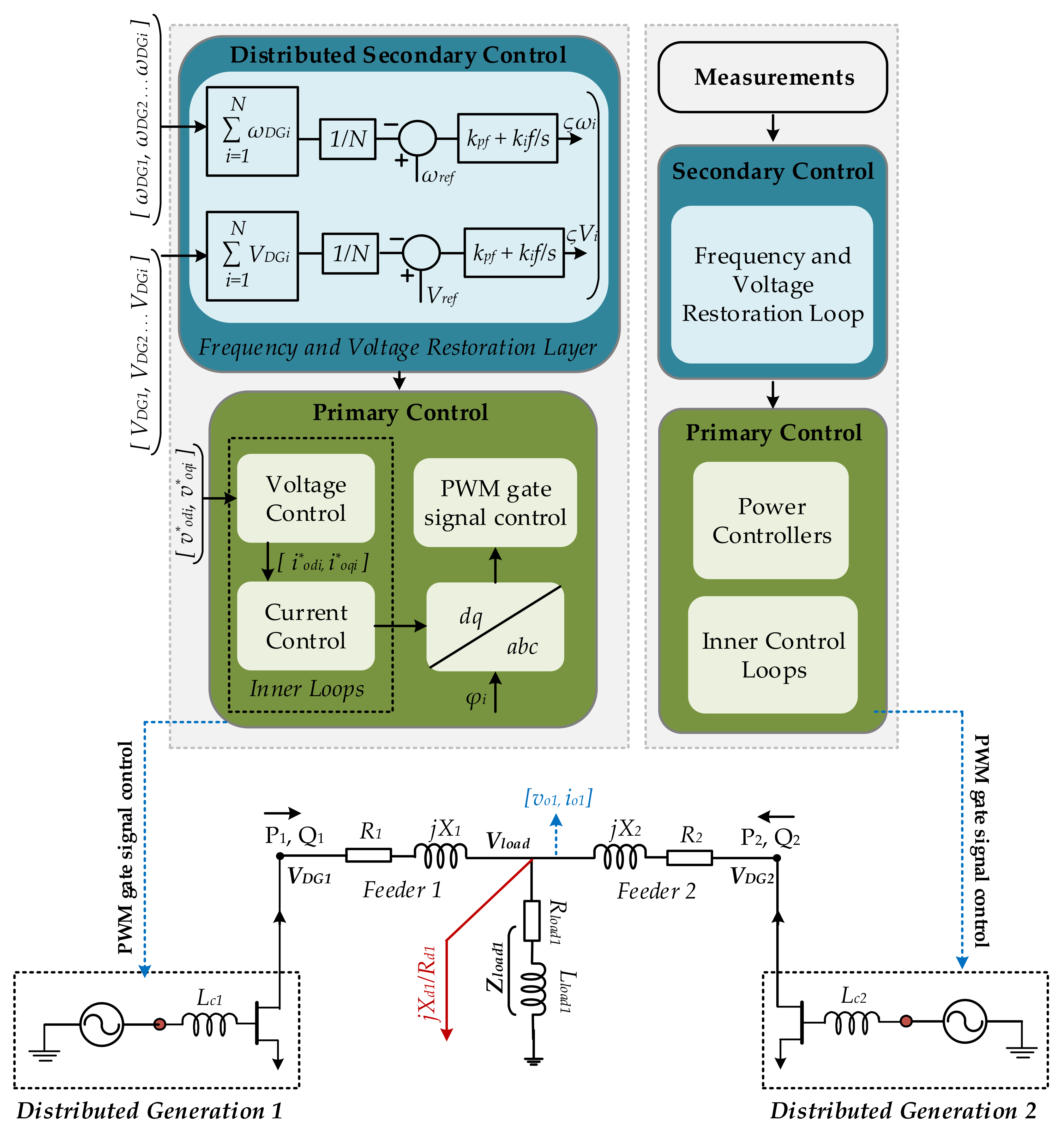
2. Proposed Control Strategy
2.1. Microgrid Power Network Model
2.2. Mathematical Model
2.3. Power Flow Control
2.4. Distributed Secondary Control Layer: Voltage and Frequency Regulation
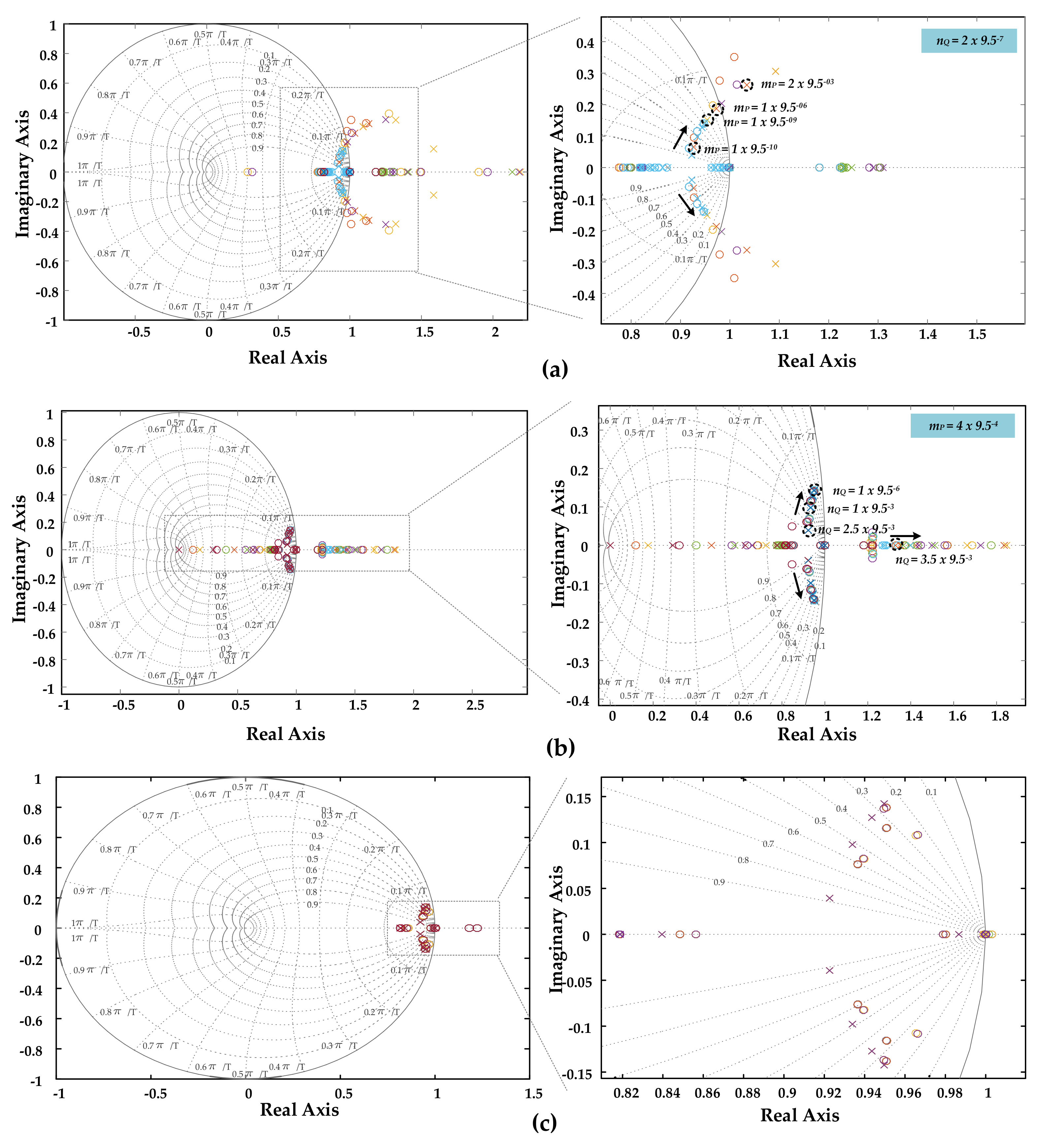
3. Small-Signal Analysis of the Microgrid System
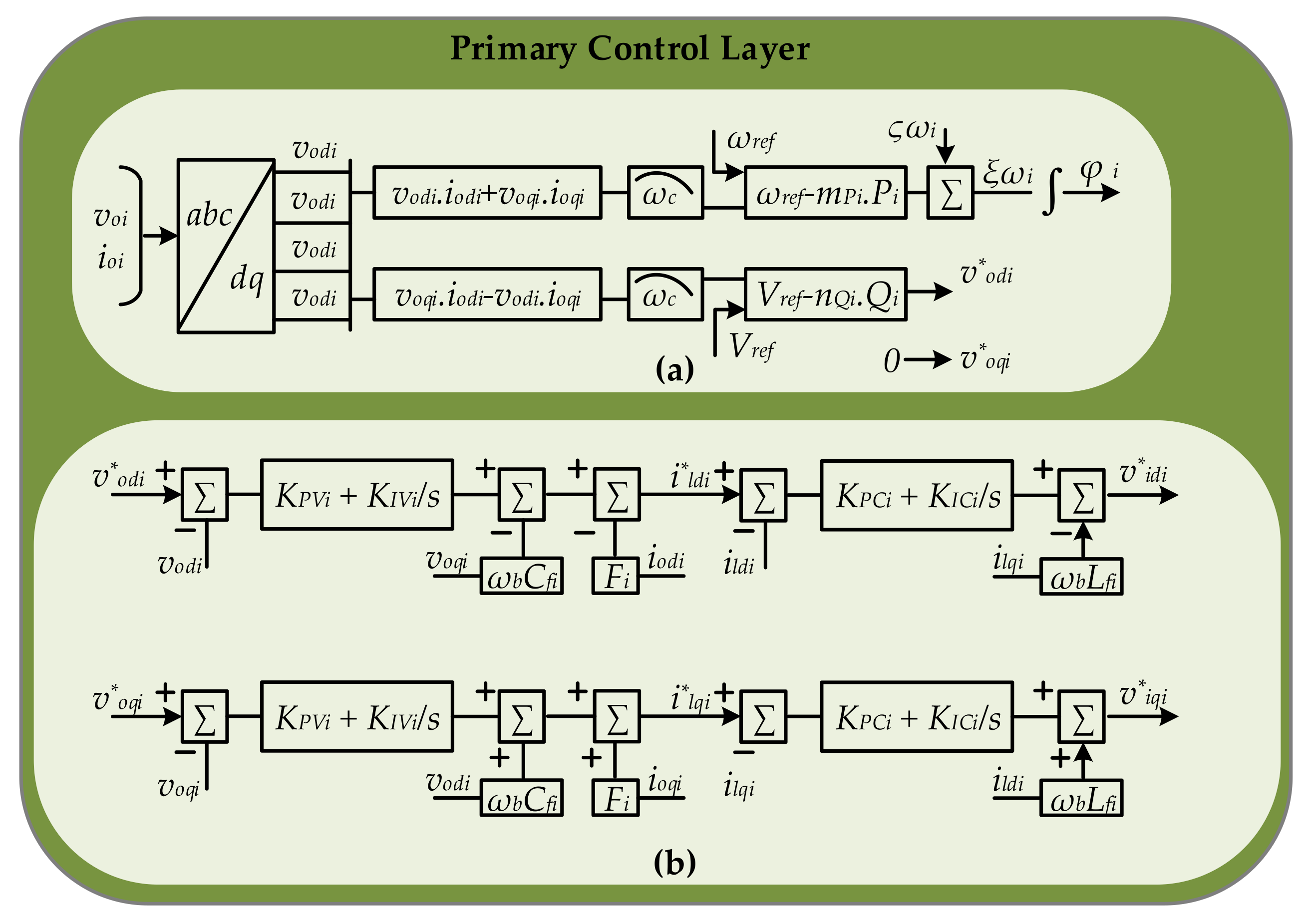
3.1. Primary Controller
3.2. Grid Side Filter Model
3.3. Complete Model of an ith Inverter
3.4. Combined Model of N Inverters
3.5. Network and Load Model
3.6. Complete Microgrid Model
4. Results and Discussion
4.1. Modeling Results
4.2. Simulation Results
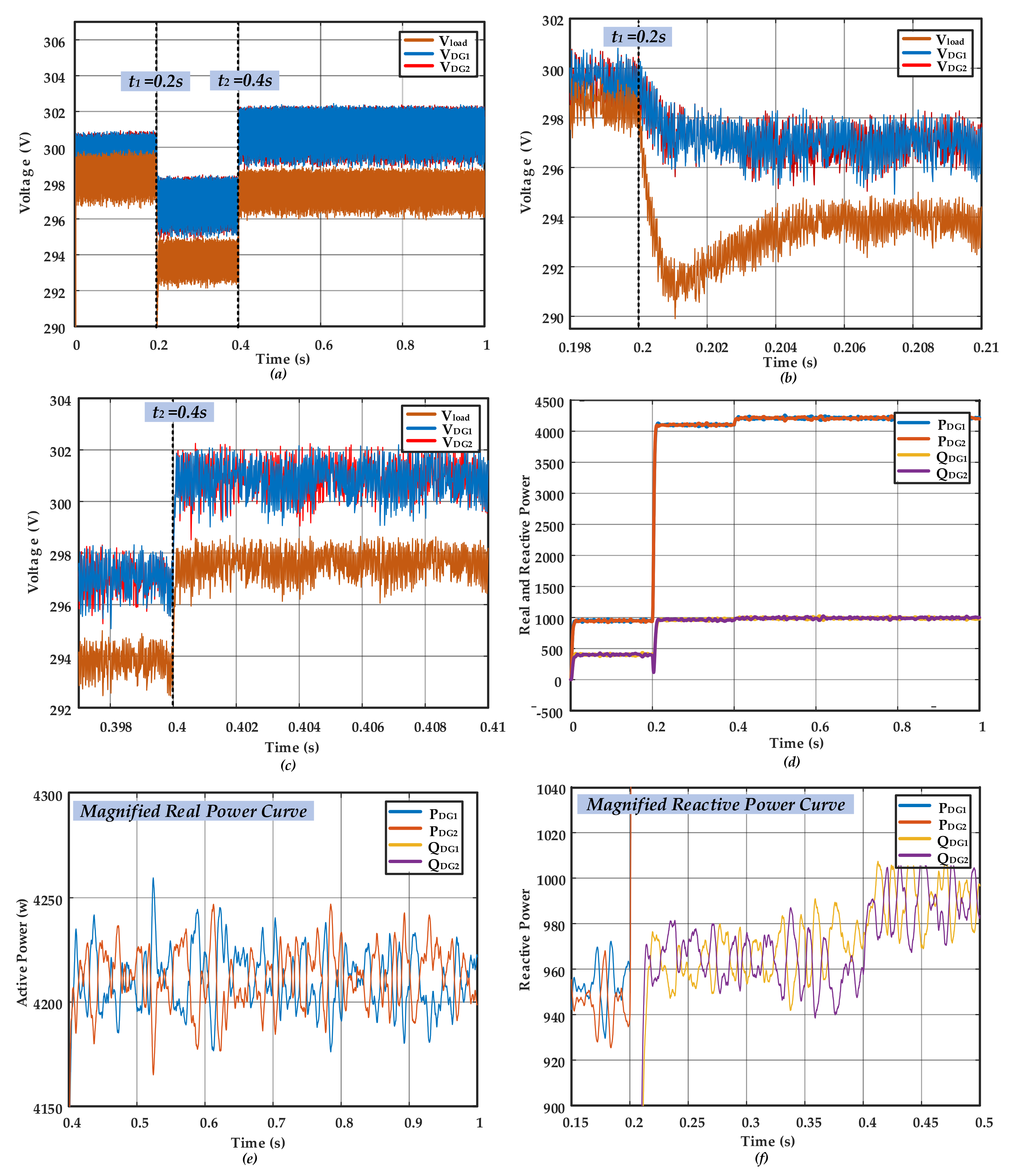
4.2.1. Case 1: MATLAB/Simulink Results with Conventional Control Strategy
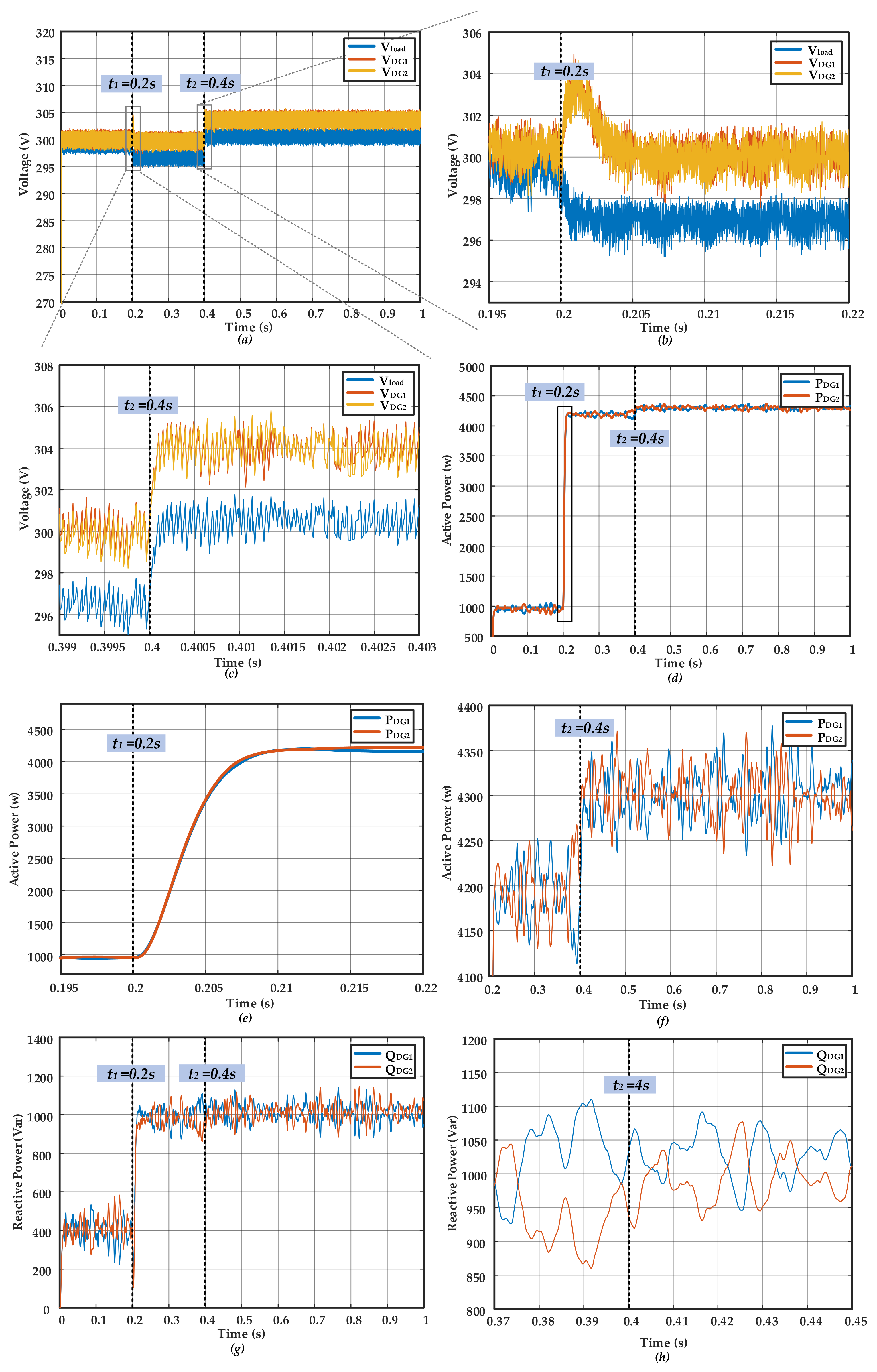
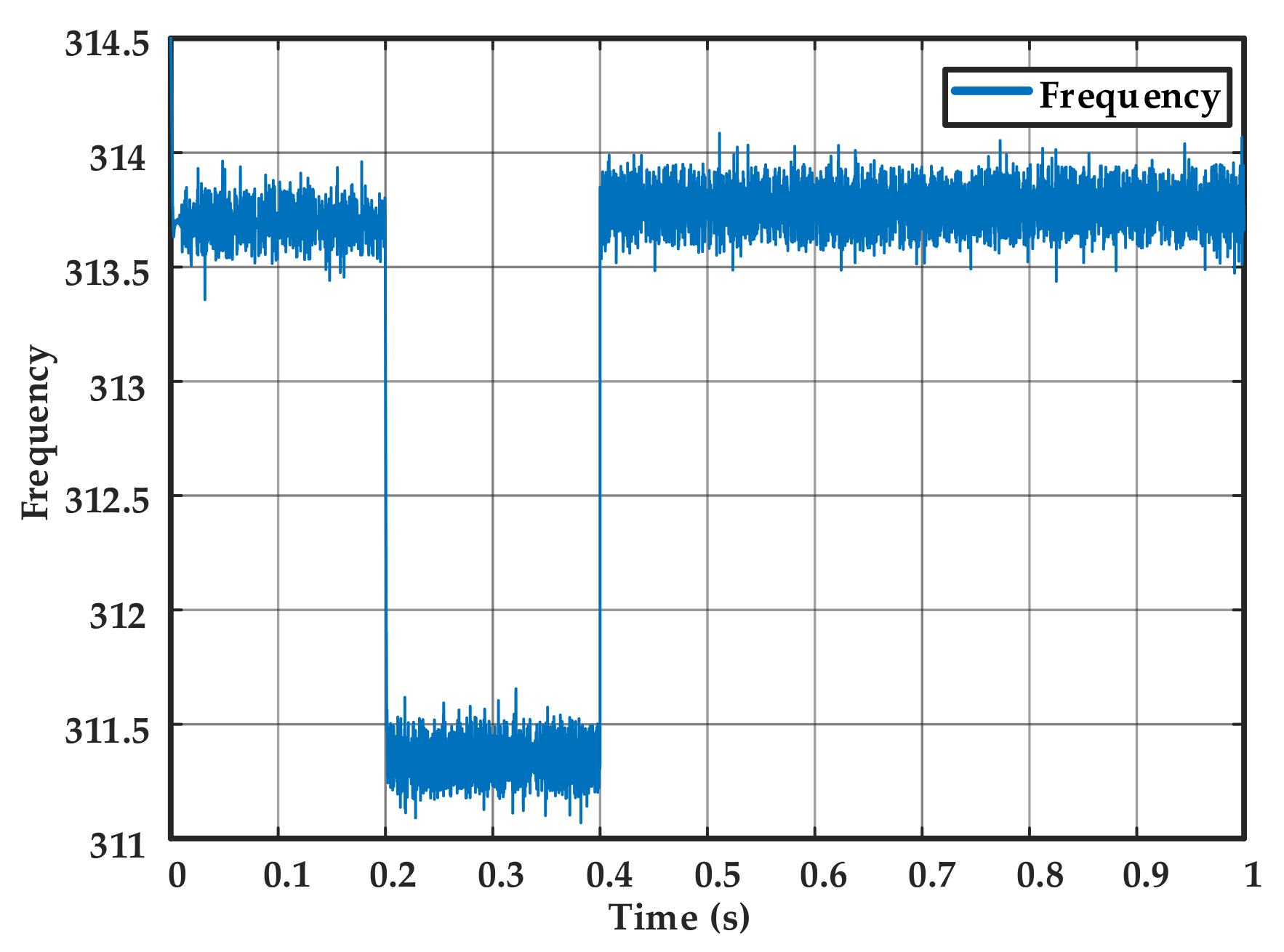
4.2.2. Case 2: MATLAB/Simulink Results with Proposed Control Strategy
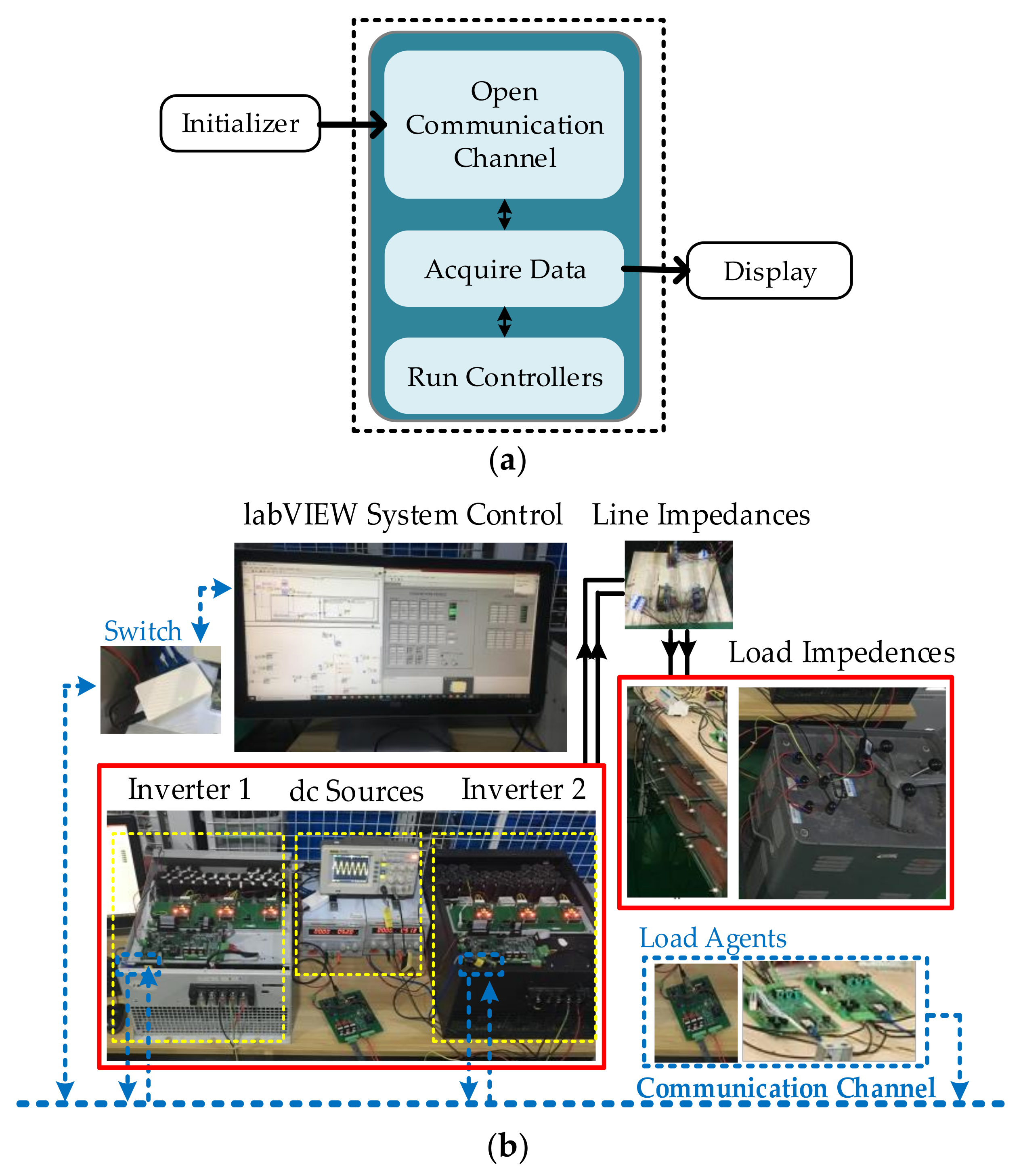
4.3. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
Appendix C. System Matrices
Appendix D. Inner Zero Control: Voltage and Current Controller Matrices
Appendix E. Grid Side Filter Model
Appendix E.1. Complete Model of an ith Inverter
Appendix F. Combined Model of N Inverters
Appendix F.1. Network and Load Model
Appendix G. Network and Load Model
References
- Zurich, C. Power System Models, Objectives and Constraints in Optimal Power Flow Calculations Rainer Bacher; 1993; pp. 217–218. Available online: http://people.ee.ethz.ch/~bacher/publications/thun_paper.pdf (accessed on 18 September 2021).
- Marcos, F.E.P.; Domingo, C.M.; Roman, T.G.S.; Palmintier, B.; Hodge, B.-M.; Krishnan, V.; García, F.D.C.; Mather, B. A Review of Power Distribution Test Feeders in the United States and the Need for Synthetic Representative Networks. Energies 2017, 10, 1896. [Google Scholar] [CrossRef] [Green Version]
- Kazmi, S.A.; Shahzad, M.K.; Khan, A.Z.; Shin, D.R. Smart Distribution Networks: A Review of Modern. Energies 2017, 10, 501. [Google Scholar] [CrossRef]
- El-Khattam, W.; Salama, M. Distributed generation technologies, definitions and benefits. Electr. Power Syst. Res. 2004, 71, 119–128. [Google Scholar] [CrossRef]
- Ranjan, R.; Das, D. Voltage Stability Analysis of Radial Distribution Networks. Electr. Power Compon. Syst. 2003, 31, 501–511. [Google Scholar] [CrossRef]
- Bina, M.T.; Kashefi, A. Electrical Power and Energy Systems Three-phase unbalance of distribution systems: Complementary analysis and experimental case study. Int. J. Electr. Power Energy Syst. 2011, 33, 817–826. [Google Scholar] [CrossRef]
- Bullich-Massagué, E.; Díaz-González, F.; Aragüés-Peñalba, M.; Girbau-Llistuella, F.; Olivella-Rosell, P.; Sumper, A. Microgrid clustering architectures. Appl. Energy 2018, 212, 340–361. [Google Scholar] [CrossRef]
- The Path of the Smart Grid 18. 2010. Available online: https://ieeexplore.ieee.org/document/5357331 (accessed on 18 September 2021).
- Habib, S.; Khan, M.M.; Abbas, F.; Ali, A.; Hashmi, K.; Shahid, M.U.; Bo, Q.; Tang, H. Risk Evaluation of Distribution Networks Considering Residential Load Forecasting with Stochastic Modeling of Electric Vehicles. Energy Technol. 2019, 7, 1900191. [Google Scholar] [CrossRef]
- Nandi, R. Research Papers Impacts of Micro-Grid and dg On Radial. 2019. Available online: https://imanagerpublications.com/article/15500/20 (accessed on 18 September 2021).
- Han, H.; Hou, X.; Yang, J.; Wu, J.; Su, M.; Guerrero, J. Review of power sharing control strategies for islanding operation of AC microgrids. IEEE Trans. Smart Grid 2016, 7, 200–215. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.Z.; Khan, M.M.; Xiangming, X.; Khalid, U.; Ahmed, M. An optimal control load demand sharing strategy for multi-feeders in islanded microgrid. Int. J. Adv. Comput. Sci. Appl. 2018, 9, 18–25. [Google Scholar] [CrossRef]
- Eid, B.M.; Rahim, N.A.; Selvaraj, J.; El Khateb, A.H. Control Methods and Objectives for Electronically Coupled Distributed Energy Resources in Microgrids: A Review. IEEE Syst. J. 2016, 10, 446–458. [Google Scholar] [CrossRef]
- Han, Y.; Li, H.; Shen, P.; Coelho, E.; Guerrero, J. Review of Active and Reactive Power Sharing Strategies in Hierarchical Controlled Microgrids. IEEE Trans. Power Electron. 2017, 32, 2427–2451. [Google Scholar] [CrossRef] [Green Version]
- Hashmi, K.; Khan, M.M.; Shahid, M.U.; Nawaz, A.; Khan, A.; Jun, J.; Tang, H. An energy sharing scheme based on distributed average value estimations for islanded AC microgrids. Int. J. Electr. Power Energy Syst. 2020, 116, 105587. [Google Scholar] [CrossRef]
- Guerrero, J.; Chandorkar, M.; Lee, T.-L.; Loh, P.C. Advanced Control Architectures for Intelligent MicroGrids—Part I: Decentralized and Hierarchical Control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.Z.; Khan, M.M.; Jiang, H.; Hashmi, K.; Shahid, M.U. An improved control strategy for three-phase power inverters in islanded ac microgrids. Inventions 2018, 3, 47. [Google Scholar] [CrossRef] [Green Version]
- Shahid, M.U.; Khan, M.M.; Yuning, J.; Hashmi, K.; Mumtaz, M.A.; Tang, H. An adaptive droop technique for load sharing in islanded DC micro grid with faulty communication. EPE J. 2021, 1–15. [Google Scholar] [CrossRef]
- Hashmi, K.; Khan, M.M.; Xu, J.; Shahid, M.U.; Habib, S.; Faiz, M.T.; Tang, H. A Quasi-average estimation aided hierarchical control scheme for power electronics-based islanded microgrids. Electronics 2019, 8, 39. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.T.; Chuang, C.C.; Chu, C.C.; Cheng, P.T. Control Strategies for Distributed Energy Resources Interface Converters in the Low Voltage Microgrid. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 2022–2029. [Google Scholar]
- Chandorkar, M.C.; Divan, D.M.; Adapa, R. Control of Parallel Connected Inverters in Standalone ac Supply Systems. IEEE Trans. Ind. Appl. 1993, 29, 136–143. [Google Scholar] [CrossRef]
- Byun, Y.B.; Koo, T.G.; Joe, K.Y.; Kim, E.S.; Seo, J.I.; Kim, D.H. Parallel Operation of Three-phase UPS Inverters by Wireless Load Sharing Control. In Proceedings of the INTELEC Twenty-Second International Telecommunications Energy Conference (Cat. No.00CH37131), Phoenix, AZ, USA, 10–14 September 2000; pp. 526–532. [Google Scholar]
- Guerrero, J.; De Vicuña, L.G.; Matas, J.; Miret, J.; Castilla, M. Output impedance design of parallel-connected UPS inverters. IEEE Int. Symp. Ind. Electron. 2004, 2, 1123–1128. [Google Scholar] [CrossRef]
- Tuladhar, A.; Jin, H.; Unger, T.; Mauch, K. Control of Parallel Inverters in Distributed AC Power Systems with Consideration of Line Impedance Effect. IEEE Trans. Ind. Appl. 2000, 36, 131–138. [Google Scholar] [CrossRef]
- Salman, H.; Khan, M.M.; Abbas, F.; Ali, A.; Faiz, M.T.; Ehsan, F.; Tang, H. Contemporary trends in power electronics converters for charging solutions of electric vehicles. CSEE J. Power Energy Syst. 2020, 6, 911–929. [Google Scholar] [CrossRef]
- Pei, Y.; Jiang, G.; Yang, X.; Wang, Z. Auto-Master-Slave Control Technique of Par allel Inverters in Distributed AC Power Systems and UPS. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No.04CH37551), Aachen, Germany, 20–25 June 2004; pp. 2050–2053. [Google Scholar]
- Divshali, P.H.; Alimardani, A.; Hosseinian, S.H.; Abedi, M. Decentralized Cooperative Control Strategy of Microsources for Stabilizing Autonomous VSC-based microgrids. IEEE Trans. Power Syst. 2012, 27, 1949–1959. [Google Scholar] [CrossRef]
- Banda, J.; Siri, K. Improved central-limit control for parallel-operation of DC-DC power converters. In Proceedings of the PESC ’95—Power Electronics Specialist Conference, Atlanta, GA, USA, 18–22 June 1995; pp. 1104–1110. Available online: https://ieeexplore.ieee.org/document/474953/authors#authors (accessed on 18 September 2021).
- Sun, X.; Lee, Y.-S.; Xu, D. Modeling, Analysis, and Implementation of Parallel Multi-Inverter Systems with Instantaneous. IEEE Trans. Power Electron. 2003, 18, 844–856. [Google Scholar]
- Yao, W.; Chen, M.; Matas, J.; Guerrero, J.; Qian, Z.-M. Design and analysis of the droop control method for parallel inverters considering the impact of the complex impedance on the power sharing. IEEE Trans. Ind. Electron. 2011, 58, 576–588. [Google Scholar] [CrossRef]
- Guerrero, J.; Vasquez, J.C.; Matas, J.; de Vicuña, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W.; Guerrero, J.M.; Blaabjerg, F.; Vasquez, J.C. An Islanding Microgrid Power Sharing Approach Using Enhanced Virtual Impedance Control Scheme. IEEE Trans. Power Electron. 2013, 28, 5272–5282. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.W. Decoupled Power Control for an Inverter Based Low Voltage Microgrid in Autonomous Operation. In Proceedings of the 2009 IEEE 6th International Power Electronics and Motion Control Conference, Wuhan, China, 17–20 May 2009; Volume 3, pp. 2490–2496. [Google Scholar]
- Li, Y.; Li, Y.W. Virtual Frequency-Voltage Frame Control of Inverter Based Low Voltage Microgrid. In Proceedings of the 2009 IEEE Electrical Power & Energy Conference (EPEC), Montreal, QC, Canada, 22–23 October 2009; pp. 1–6. [Google Scholar]
- Li, Y.; Li, Y.W. Power management of inverter interfaced autonomous microgrid based on virtual frequency-voltage frame. IEEE Trans. Smart Grid 2011, 2, 30–40. [Google Scholar] [CrossRef]
- Perreault, D.; Selders, R.; Kassakian, J. Frequency-Based Current-Sharing Techniques for Paralleled Power Converters. IEEE Trans. Power Electron. 1998, 13, 626–634. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W. An Enhanced Microgrid Load Demand Sharing Strategy. IEEE Trans. Power Electron. 2012, 27, 3984–3995. [Google Scholar] [CrossRef]
- Vasquez, J.C.; Guerrero, J.; Luna, A.; Rodriguez, P.; Teodorescu, R. Adaptive Droop Control Applied to Voltage-Source Inverters Operating in Grid-Connected and Islanded Modes. IEEE Trans. Ind. Electron. 2009, 56, 4088–4096. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W. An accurate reactive power sharing control strategy for DG units in a microgrid. In Proceedings of the 8th International Conference Power Electron—ECCE Asia Green World with Power Electron, ICPE 2011-ECCE Asia, Jeju, Korea, 30 May–3 June 2011; pp. 551–556. [Google Scholar] [CrossRef]
- Habib, S.; Khan, M.M.; Abbas, F.; Numan, M.; Ali, Y.; Tang, H.; Yan, X. A framework for stochastic estimation of electric vehicle charging behavior for risk assessment of distribution networks. Front. Energy 2019, 14, 298–317. [Google Scholar] [CrossRef]
- Majumder, R.; Member, S.; Ghosh, A. Angle Droop versus Frequency Droop in a Voltage Source Converter Based Autonomous Microgrid. In Proceedings of the 2009 IEEE Power & Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009. [Google Scholar]
- Majumder, R.; Member, S.; Chaudhuri, B.; Ghosh, A. Improvement of Stability and Load Sharing in an Autonomous Microgrid Using Supplementary Droop Control Loop. IEEE Trans. Power Syst. 2010, 25, 796–808. [Google Scholar] [CrossRef] [Green Version]
- Guerrero, J.M.; Matas, J.; de Vicuña, L.G.; Castilla, M.; Miret, J. Decentralized Control for Parallel Operation of Distributed Generation Inverters Using Resistive Output Impedance. IEEE Trans. Ind. Electron. 2007, 54, 994–1004. [Google Scholar] [CrossRef]
- Lee, C.T.; Chu, C.C.; Cheng, P.T. A new droop control method for the autonomous operation of distributed energy resource interface converters. IEEE Trans. Power Electron. 2013, 28, 1980–1993. [Google Scholar] [CrossRef]
- Bidram, A.; Member, S.; Davoudi, A. Hierarchical Structure of Microgrids Control System. IEEE Trans. Smart Grid 2012, 3, 1963–1976. [Google Scholar] [CrossRef]
- Arboleya, P.; Diaz, D.; Guerrero, J.M.; Garcia, P.; Briz, F.; Aleixandre, J.G. An improved control scheme based in droop characteristic for microgrid converters. Electr. Power Syst. Res. 2010, 80, 1215–1221. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sr. No. | Control Parameters for Stability Analysis | |||
| 1 | Droop Gains | Min | Max | |
| mP | 0.02 | 0.32 | ||
| 2 | Consensus frequency | |||
| kpf | 0.45 | - | ||
| kif | 4.5 × e−04 | - | ||
| 3 | Consensus voltage | |||
| kpV | 0.3 | 2.5 | ||
| kiV | 0.08 | 0.48 | ||
| 4 | Time delay | |||
| τdelay | 0 | 6 × e−03 | ||
| Sr. No. | Control Parameters for Experimental Prototype | |||
| Components | Units | Components | Units | |
| 1 | Operating frequency | 50 Hz | Sampling rate | 1 ms |
| 2 | DG units ratings | 3 A, 30 V | jXi1, jXi2 | 200 uH |
| 3 | jXc1, jXc2 | 20 uF | jXg1, jXg2 | 60 uH |
| 4 | Lline1/Rline1 | 2 mH/0.2 Ω | Lload/Rload | 2 mH/10 Ω |
| 5 | Lline2/Rline2 | 2 mH/0.2 Ω | Ld1/Rd1 | 1 mH/5 Ω |
| Sr. | Components | Units | Components | Units |
|---|---|---|---|---|
| 1 | Nominal frequency | 50 Hz | Lload/Rload | 80 mH/60 Ω |
| 2 | Simulations Vref | 300 V | Ld1/Rd1 | 10 mH/20 Ω |
| 3 | Lline1/Rline1; Lline2/Rline2 | 2 mH/0.2 Ω; 2 mH/0.2 Ω | Switching-Frequency | 16 kHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, M.Z.; Mu, C.; Habib, S.; Alhosaini, W.; Ahmed, E.M. An Enhanced Distributed Voltage Regulation Scheme for Radial Feeder in Islanded Microgrid. Energies 2021, 14, 6092. https://doi.org/10.3390/en14196092
Khan MZ, Mu C, Habib S, Alhosaini W, Ahmed EM. An Enhanced Distributed Voltage Regulation Scheme for Radial Feeder in Islanded Microgrid. Energies. 2021; 14(19):6092. https://doi.org/10.3390/en14196092
Chicago/Turabian StyleKhan, Muhammad Zahid, Chaoxu Mu, Salman Habib, Waleed Alhosaini, and Emad M. Ahmed. 2021. "An Enhanced Distributed Voltage Regulation Scheme for Radial Feeder in Islanded Microgrid" Energies 14, no. 19: 6092. https://doi.org/10.3390/en14196092
APA StyleKhan, M. Z., Mu, C., Habib, S., Alhosaini, W., & Ahmed, E. M. (2021). An Enhanced Distributed Voltage Regulation Scheme for Radial Feeder in Islanded Microgrid. Energies, 14(19), 6092. https://doi.org/10.3390/en14196092