
Frequency Control of Large-Scale Interconnected Power Systems via Battery Integration: A Comparison between the Hybrid Battery Model and WECC Model



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- State space representation of the WECC model for frequency regulation study.
- Hybrid and WECC model battery integration into the power system.
- Decentralized control design for interconnected systems for case study model considering the hybrid and WECC battery models.
- Hybrid control design for the hybrid battery model to utilize the switching between the charging and discharging scenarios.
2. Problem Statement and System Description
3. Decentralized Optimal Control for Interconnected Systems
4. Battery Integration into the Power System
4.1. Case 1: Hybrid Battery Model
4.2. Case 2: Western Electricity Coordinating Council (WECC) Battery Model
5. Simulation Results
5.1. Case 1: Hybrid Battery Model
5.2. Case 2: WECC Battery Model
5.3. Result Discussion
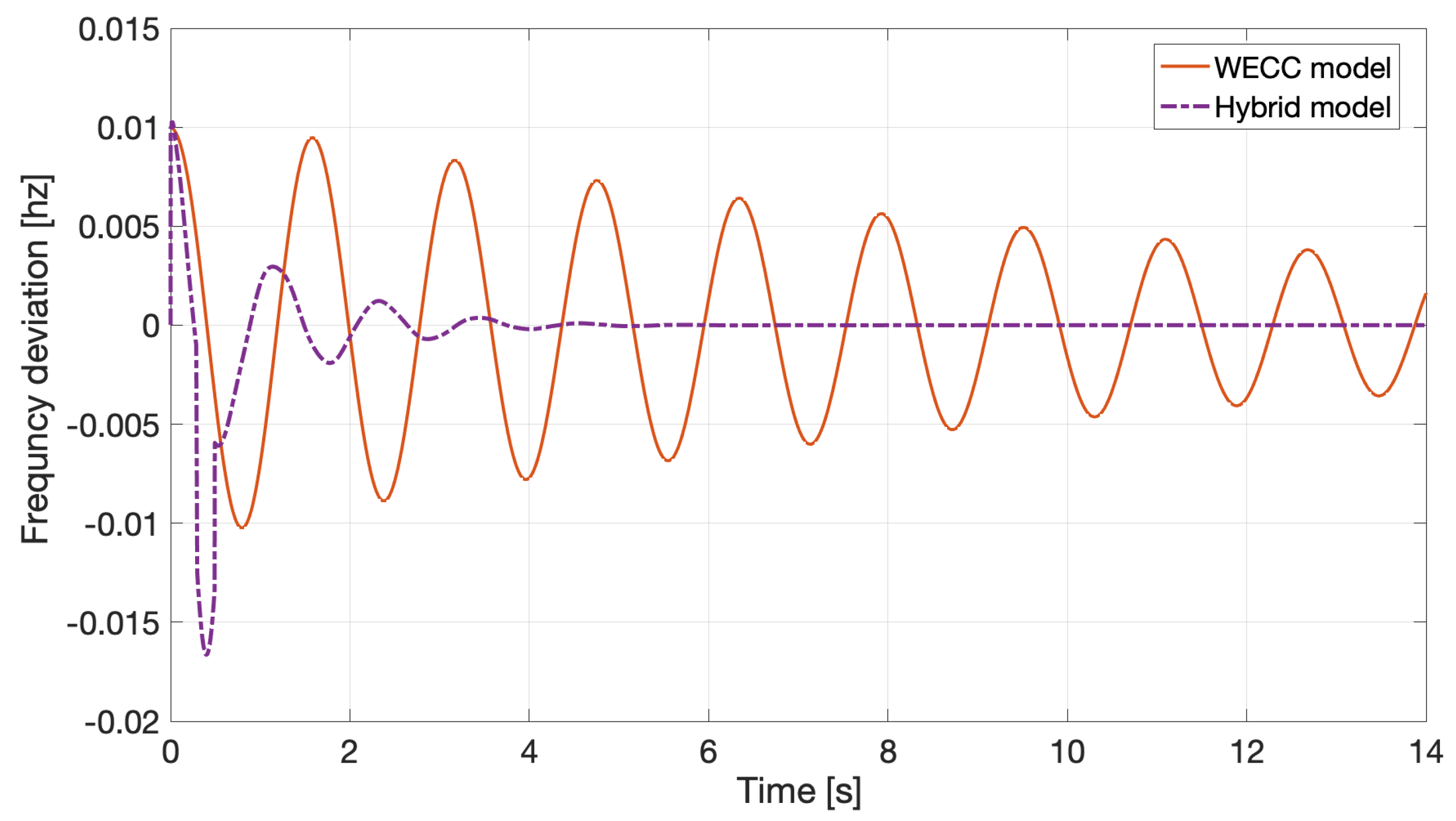
- Frequency deviations for the system with batteries modeled via hybrid model are suppressed faster, compared to the system with the WECC model for batteries.
- Although the WECC model has two control inputs, the control design is more challenging, compared to the hybrid battery model.
- Since the WECC model has fifth order dynamics, it has a strong inter-connectivity matrix, which serves as a major perturbation in the system.
- The optimality index in the WECC model is , which is lower than the smallest optimality index in the hybrid model.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Aditya, S.K.; Das, D. Battery energy storage for load frequency control of an interconnected power system. Electr. Power Syst. Res. 2001, 58, 179–185. [Google Scholar] [CrossRef]
- Liang, L.; Zhong, J.; Jiao, Z. Frequency regulation for a power system with wind power and battery energy storage. In Proceedings of the IEEE International Conference on Power System Technology (POWERCON), Auckland, New Zealand, 30 October–2 November 2012; pp. 1–6. [Google Scholar]
- Strbac, G. Demand side management: Benefits and challenges. Energy Policy 2008, 36, 4419–4426. [Google Scholar] [CrossRef]
- Divya, K.C.; Østergaard, J. Battery energy storage technology for power systems—An overview. Electr. Power Syst. Res. 2009, 79, 511–520. [Google Scholar] [CrossRef]
- Integrating Renewable Electricity on the Grid, A Report by the American Physical Society (APS) Panel on Public Affairs. Available online: www.aps.org/policy/reports/popareports/upload/integratingelec.pdf (accessed on 5 August 2021).
- Setiadi, H.; Krismanto, A.U.; Mithulananthan, N. Influence of BES system on local and inter-area oscillation of power system with high penetration of PV plants. In Proceedings of the 2017 International Conference on Applied System Innovation (ICASI), Sapporo, Japan, 13–17 May 2017. [Google Scholar]
- Souvik, C.; Gayme, D.F.; Chakrabortty, A. Coordinating wind farms and battery management systems for inter-area oscillation damping: A frequency-domain approach. IEEE Trans. Power Syst. 2013, 29, 1454–1462. [Google Scholar]
- Héctor, P.P.; Wang, Y.; Silva-Saravia, H. On inertia distribution, inter-area oscillations and location of electronically-interfaced resources. IEEE Trans. Power Syst. 2017, 33, 995–1003. [Google Scholar]
- Boukarim, G.E.; Wang, S.; Chow, J.H.; Taranto, G.N.; Martins, N. A comparison of classical, robust, and decentralized control designs for multiple power system stabilizers. IEEE Trans. Power Syst. 2000, 15, 1287–1292. [Google Scholar] [CrossRef]
- Zecevic, A.; Siljak, D.D. Control of Complex Systems: Structural Constraints and Uncertainty; Springer Science & Business Media: New York, NY, USA, 2010. [Google Scholar]
- Singh, A.K.; Pal, B.C. Decentralized control of oscillatory dynamics in power systems using an extended LQR. IEEE Trans. Power Syst. 2015, 31, 1715–1728. [Google Scholar] [CrossRef] [Green Version]
- AlRifai, M.; Zribi, M. A robust decentralized controller for power system load frequency control. In Proceedings of the 39th International Universities Power Engineering Conference 2004 (UPEC 2004), Bristol, UK, 6–8 September 2004; Volume 2. [Google Scholar]
- Weitenberg, E.; Jiang, Y.; Zhao, C.; Mallada, E.; De Persis, C.; Dörfler, F. Robust decentralized secondary frequency control in power systems: Merits and tradeoffs. IEEE Trans. Autom. Control 2018, 64, 3967–3982. [Google Scholar] [CrossRef] [Green Version]
- Rezvantalab, J.; Kazemi, M.H.; Khaki Seddigh, A. Multi-area robust decentralized Load Frequency Controller design in a restructured power system using Quantitative Feedback Theory. In Proceedings of the 2009 International Conference on Electric Power and Energy Conversion Systems (EPECS), Sharjah, United Arab Emirates, 10–12 November 2009. [Google Scholar]
- Hamzeh, M.; Mokhtari, H.; Karimi, H. A decentralized self-adjusting control strategy for reactive power management in an islanded multi-bus MV microgrid. Can. J. Electr. Comput. Eng. 2013, 36, 18–25. [Google Scholar] [CrossRef]
- Xu, X.; Bishop, M.; Oikarinen, D.G.; Hao, C. Application and modeling of battery energy storage in power systems. CSEE J. Power Energy Syst. 2016, 2, 82–90. [Google Scholar] [CrossRef]
- Benigni, A.; D’Antona, G.; Ghisla, U.; Monti, A.; Ponci, F. A decentralized observer for ship power system applications: Implementation and experimental validation. IEEE Trans. Instrum. Meas. 2009, 59, 440–449. [Google Scholar] [CrossRef]
- Siljak, D.D. Decentralized Control of Complex Systems; Dover publications, Inc.: Mineola, NY, USA, 2018. [Google Scholar]
- WECC Second Generation Wind Turbine Models 012314. Available online: https://www.wecc.org (accessed on 5 August 2021).
- WECC Renewable Energy Modeling Task Force. WECC Battery Storage Dynamic Modeling Guideline. In Proceedings of the Western Electricity Coordinating Council Modeling and Validation Work Group, Denver, CO, USA, November 2016.
- Lu, C.F.; Liu, C.-C.; Wu, C.J. Dynamic modelling of battery energy storage system and application to power system stability. IEE Proc. Gener. Transm. Distrib. 1995, 142, 429–435. [Google Scholar] [CrossRef] [Green Version]
- Biroon, R.A.; Pisu, P.; Schoenwald, D. Large-Scale Battery Energy Storage System Dynamic Model for Power System Stability Analysis. In Proceedings of the Texas Power & Energy Conference (TPEC), College Station, TX, USA, 6–7 February 2020. [Google Scholar]
- Biroon, R.A.; Abdollahi, Z.; Hadidi, R. Frequency Control by Tariff Regulation: A comparison between the MPC and Tariff Modification. In Proceedings of the 2020 IEEE Texas Power and Energy Conference (TPEC), College Station, TX, USA, 6–7 February 2020. [Google Scholar]
- Hannu, L.; Saari, P.; Komulainen, R. Voltage and frequency control of inverter based weak LV network microgrid. In Proceedings of the 2005 International Conference on Future Power Systems, Amsterdam, The Netherlands, 18 November 2005. [Google Scholar]
- Biroon, R.A.; Pisu, P.; Schoenwald, D. A Hybrid Control Framework for Large-Scale Battery Integration to the Power System for Stability Analysis. In Proceedings of the American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020. [Google Scholar]
- Shubhanga, K.N. Power System Analysis, a Dynamic Presentation; Pearson: New Delhi, India, 2018. [Google Scholar]
- Padyar, K.R. Power System Dynamics Stability and Control; John Wiley & Sons: Hyderabad, AP, India, 2002. [Google Scholar]
- Biroon, R.A. Battery Integration to the Power Grid and Frequency Regulation. Ph.D. Thesis, Clemson University, Clemson, SC, USA, 2020. [Google Scholar]
- Chow, J.H. Power System Coherency and Model Reduction; Springer: New York, NY, USA, 2013; Volume 84. [Google Scholar]
- Rogers, G. Power System Oscillations; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Yukai, C.; Macii, E.; Poncino, M. A circuit-equivalent battery model accounting for the dependency on load frequency. In Proceedings of the Design, Automation & Test in Europe Conference & Exhibition (DATE), Lausanne, Switzerland, 27–31 March 2017. [Google Scholar]
- Baek, D.; Chen, Y.; Bocca, A.; Bottaccioli, L.; Di Cataldo, S.; Gatteschi, V.; Pagliari, D.J.; Patti, E.; Urgese, G.; Chang, N.; et al. Battery-aware operation range estimation for terrestrial and aerial electric vehicles. IEEE Trans. Veh. Technol. 2019, 68, 5471–5482. [Google Scholar] [CrossRef]
- Liberzon, D.; Morse, A.S. Basic problems in stability and design of switched systems. IEEE Control Syst. Mag. 1999, 19, 59–70. [Google Scholar]
- Morse, A.S. Supervisory control of families of linear set-point controllers—Part 1: Exact matching. IEEE Trans. Autom. Control 1996, 41, 1413–1431. [Google Scholar] [CrossRef]
- Lin, H.; Panos, A.J. Stability and stabilizability of switched linear systems: A survey of recent results. IEEE Trans. Autom. Control 2009, 54, 308–322. [Google Scholar] [CrossRef]
- Pourbeik, P.; Williams, S.E.; Weber, J.; Sanchez-Gasca, J.; Senthil, J.; Huang, S.; Bolton, K. Modeling and dynamic behavior of battery energy storage: A simple model for large-scale time-domain stability studies. IEEE Electrif. Mag. 2015, 3, 47–51. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdollahi Biroon, R.; Pisu, P.; Schoenwald, D. Frequency Control of Large-Scale Interconnected Power Systems via Battery Integration: A Comparison between the Hybrid Battery Model and WECC Model. Energies 2021, 14, 5605. https://doi.org/10.3390/en14185605
Abdollahi Biroon R, Pisu P, Schoenwald D. Frequency Control of Large-Scale Interconnected Power Systems via Battery Integration: A Comparison between the Hybrid Battery Model and WECC Model. Energies. 2021; 14(18):5605. https://doi.org/10.3390/en14185605
Chicago/Turabian StyleAbdollahi Biroon, Roghieh, Pierluigi Pisu, and David Schoenwald. 2021. "Frequency Control of Large-Scale Interconnected Power Systems via Battery Integration: A Comparison between the Hybrid Battery Model and WECC Model" Energies 14, no. 18: 5605. https://doi.org/10.3390/en14185605
APA StyleAbdollahi Biroon, R., Pisu, P., & Schoenwald, D. (2021). Frequency Control of Large-Scale Interconnected Power Systems via Battery Integration: A Comparison between the Hybrid Battery Model and WECC Model. Energies, 14(18), 5605. https://doi.org/10.3390/en14185605