
An Optimized Adaptive Protection Scheme for Numerical and Directional Overcurrent Relay Coordination Using Harris Hawk Optimization

 ,
, 
 ,
, 
Abstract
:1. Introduction
2. DOCR Problem Formulation
2.1. Coordination Criteria
2.2. Relay Setting Bounds
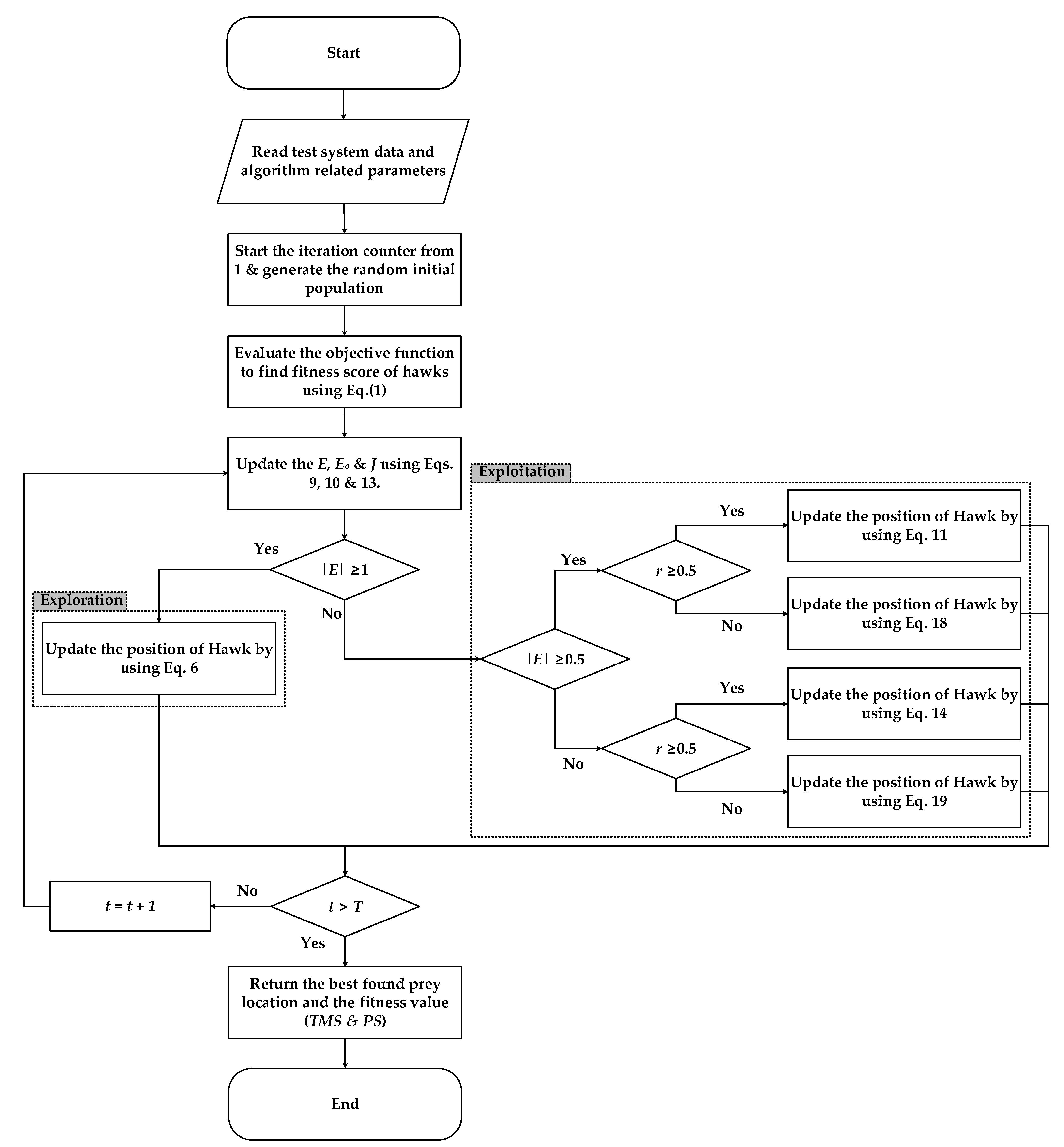
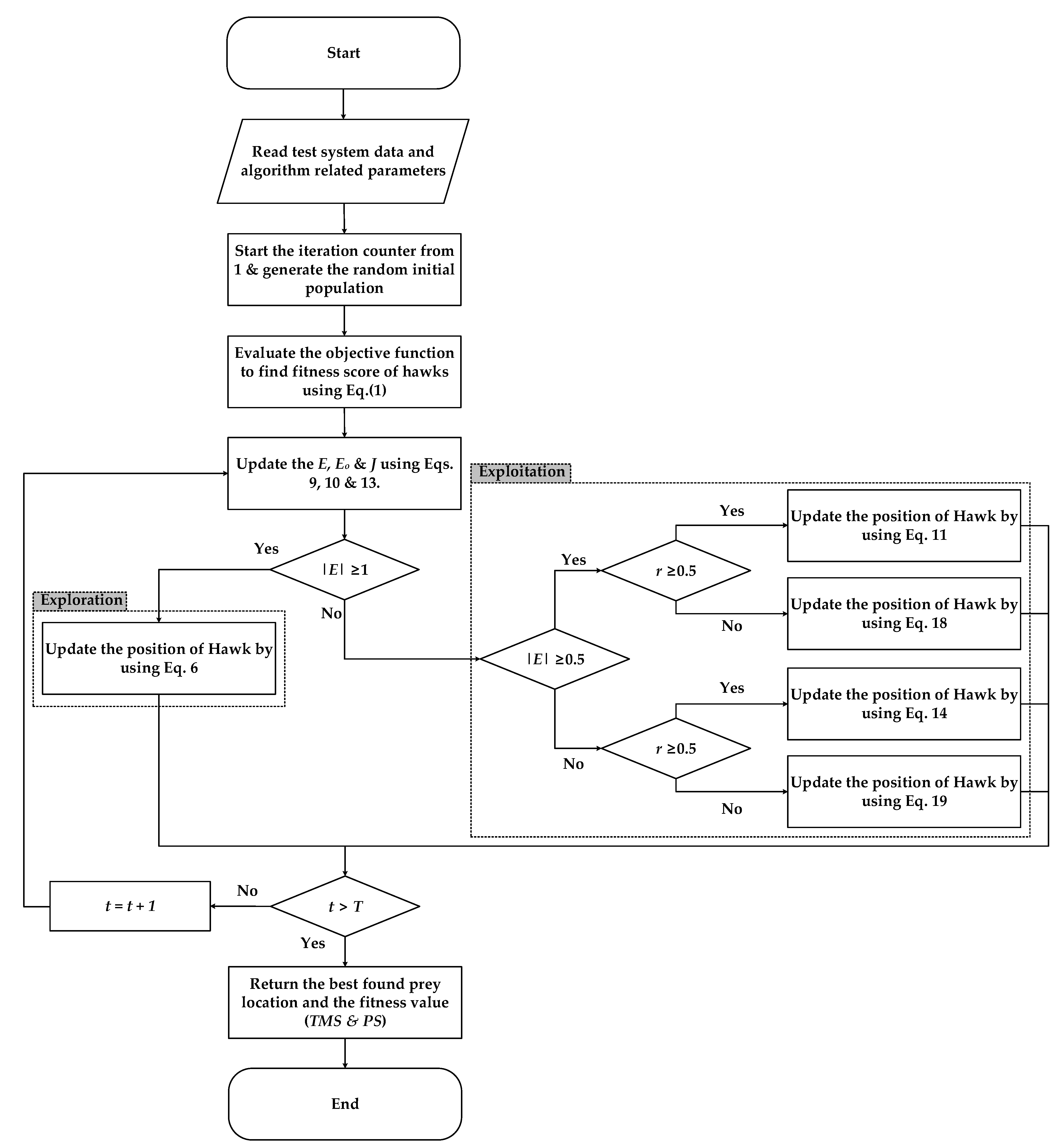
3. Harris Hawks Optimization (HHO) Algorithm
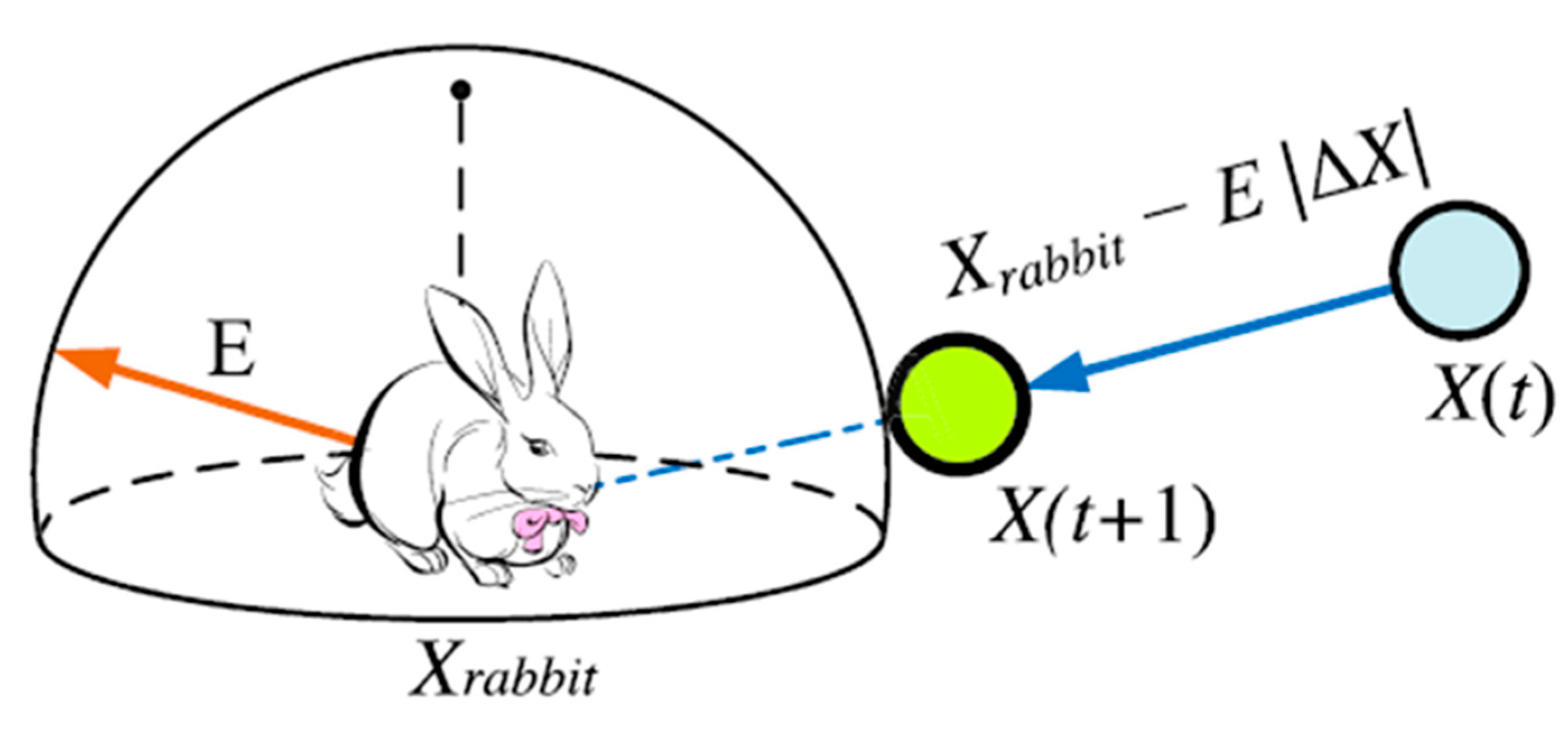
3.1. Exploration Phase
3.2. Transition from Exploration to Exploitation
3.3. Exploitation Phase
3.3.1. Soft Siege
3.3.2. Hard Siege
3.3.3. Soft Siege with Progressive Rapid Dives
3.3.4. Hard Siege with Progressive Rapid Dives
3.4. Computational Complexity
4. Results and Discussion
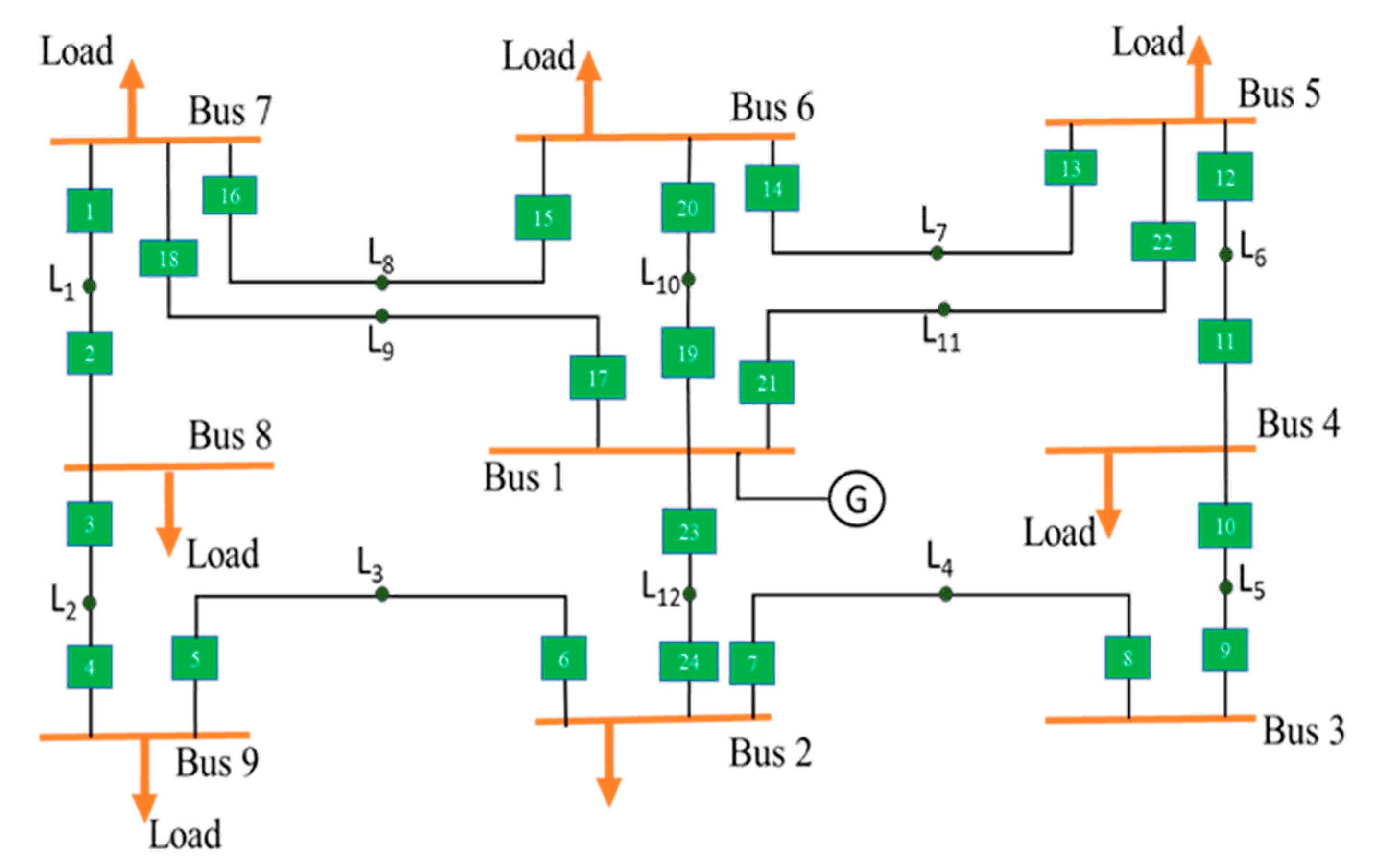
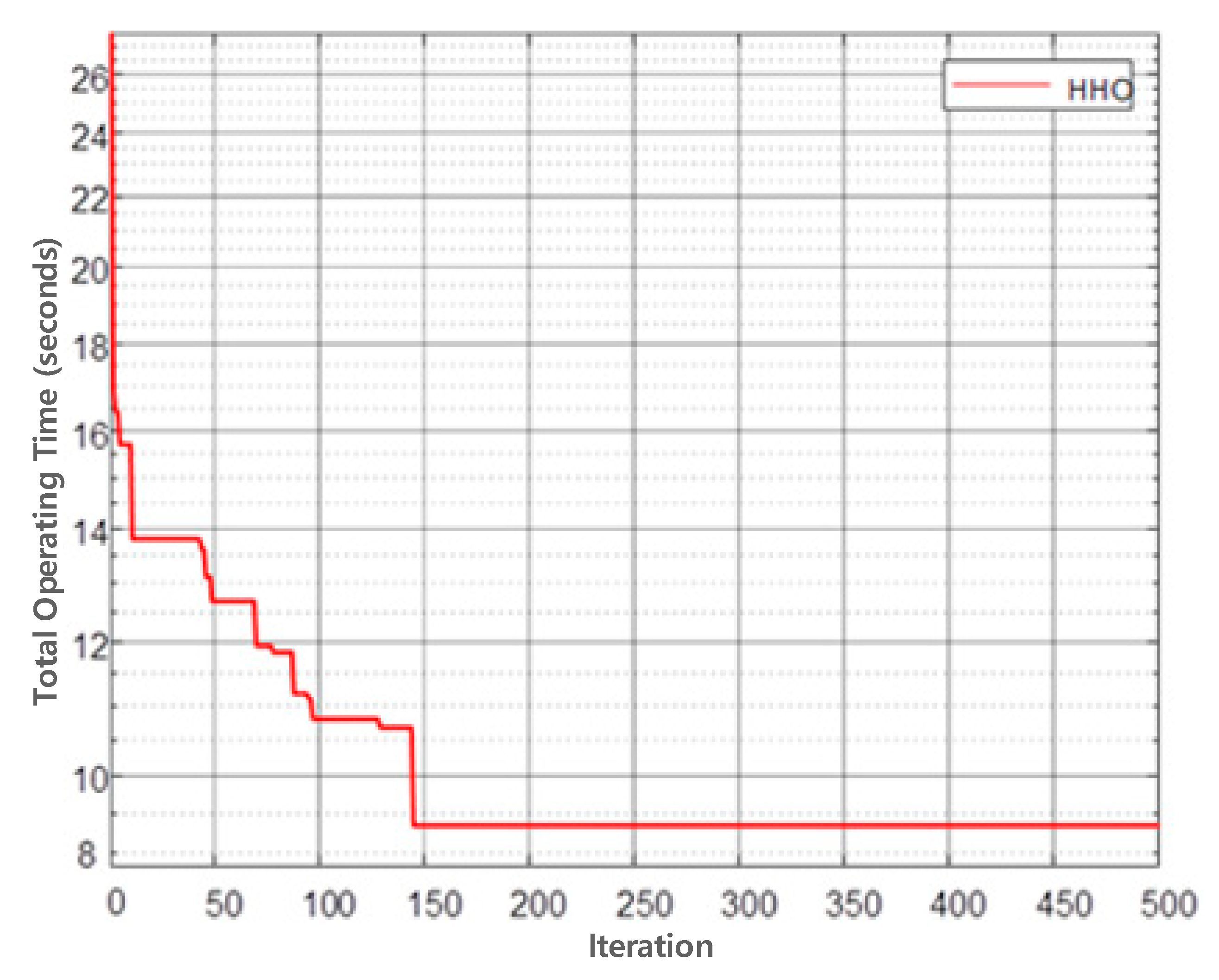
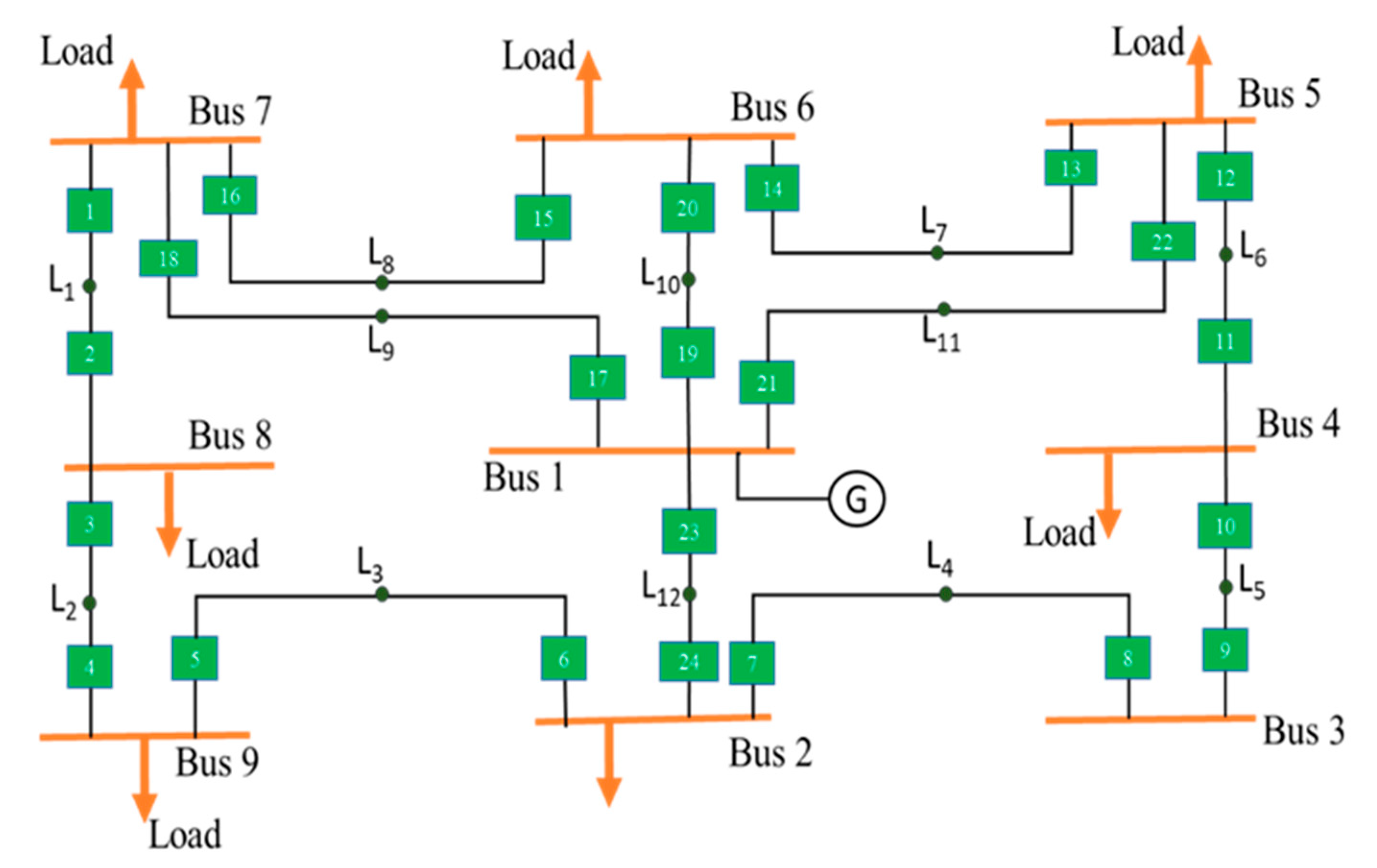
4.1. IEEE Nine Bus System for DOCRs
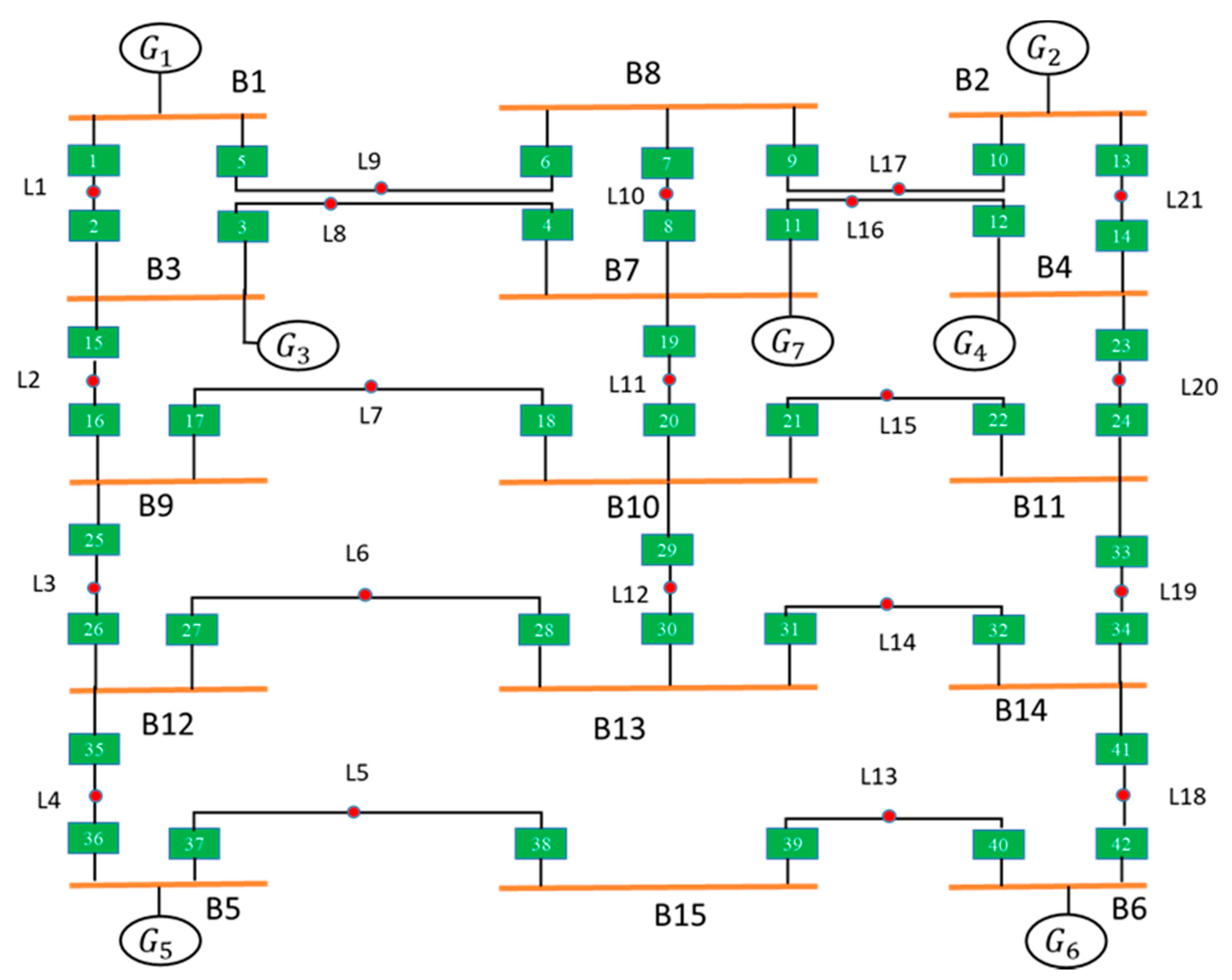
4.2. IEEE 15 Bus System for DOCRs
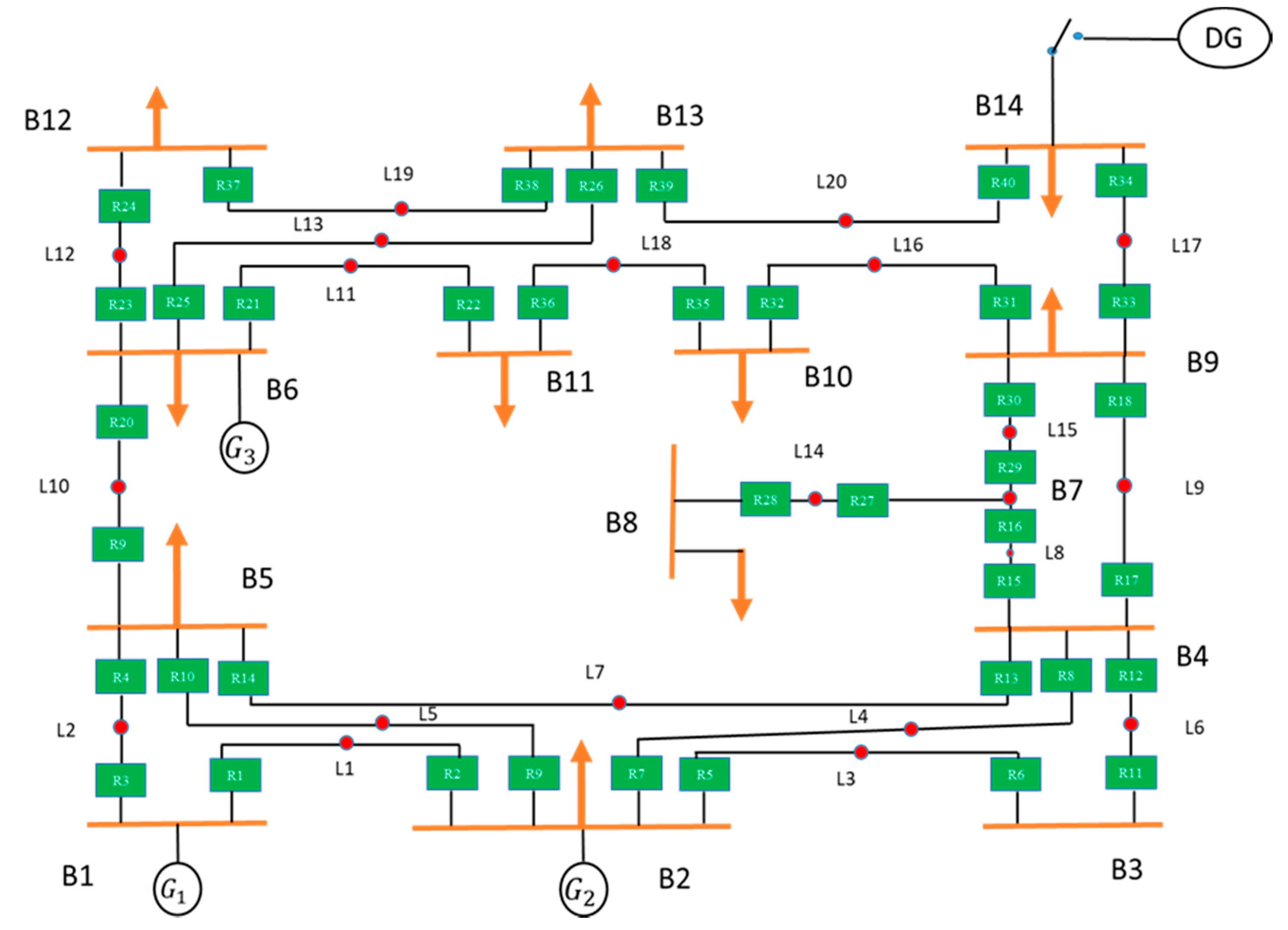
4.3. IEEE 14 Bus System Using Numerical Relays
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameter | Value |
|---|---|---|
| PSO | Max. iteration | 100 |
| Population size | 60 | |
| (c1, c2) | (2.025, 2.025) | |
| (wmin, wmax) | (0.4, 0.9) | |
| GA | Max. iteration | 100 |
| Population size | 256 | |
| Crossover rate | 0.5 | |
| Mutation rate | 0.1 | |
| IDE | Max. iteration | 500 |
| Population size | 48 | |
| Crossover rate | 0.8 | |
| (F1, F2) | (0.7, 0.3) | |
| BBO | Max. iteration | 40 |
| Population size | 100 | |
| MTLBO | Max. iteration | 500 |
| Population size | 100 | |
| No. of cycles | 20 | |
| SA | Max. iteration | 1000 |
| Population size | 120 | |
| (µmin, µmax) | (0.95, 0.0111) | |
| (wmin, wmax) | (0.1, 0.9) | |
| DE | Max. iteration | 100 |
| Population size | 30 | |
| Crossover rate | 0.4 | |
| Mutation factor | 0.5 | |
| HS | Max. iteration | 100 |
| Population size | 10 | |
| HMCR | 0.9 | |
| (BWmin, BWmax) | (0.0001, 1.0) | |
| (PARmin, PARmax) | (0.4, 0.7) | |
| GSO | Max. iteration | 1000 |
| IGSO | Max. iteration | 1000 |
| Threshold value | 0.01 | |
| MAPSO | (α1, α2) | (1, 1) |
| (β1, β2) | (100, 50) |
References
- Lu, Y.; Chung, J.-L. Detecting and solving the coordination curve intersection problem of overcurrent relays in subtransmission systems with a new method. Electr. Power Syst. Res. 2013, 95, 19–27. [Google Scholar] [CrossRef]
- Ezzeddine, M.; Kaczmarek, R.; Iftikhar, M. Coordination of directional overcurrent relays using a novel method to select their settings. IET Gener. Transm. Distrib. 2011, 5, 743–750. [Google Scholar] [CrossRef]
- Sharifian, H.; Abyaneh, H.A.; Salman, S.K.; Mohammadi, R.; Razavi, F. Determination of the minimum break point set using expert system and genetic algorithm. IEEE Trans. Power Deliv. 2010, 25, 1284–1295. [Google Scholar] [CrossRef]
- Yu, J.T.; Kim, C.H.; Wadood, A.; Khurshiad, T.; Rhee, S. Self-adaptive multi-population JAYA algorithm with lévy flights for solving economic load dispatch problems. IEEE Access 2019, 7, 21372–21384. [Google Scholar] [CrossRef]
- Yu, J.; Kim, C.H.; Wadood, A.; Khurshiad, T.; Rhee, S.B. A novel multi-population based chaotic JAYA algorithm with application in solving economic load dispatch problems. Energies 2018, 11, 1946. [Google Scholar] [CrossRef] [Green Version]
- Gholami Farkoush, S.; Khurshaid, T.; Wadood, A.; Kim, C.H.; Kharal, K.H.; Kim, K.H.; Rhee, S.B. Investigation and optimization of grounding grid based on lightning response by using ATP-EMTP and genetic algorithm. Complexity 2018, 2018, 1–8. [Google Scholar] [CrossRef]
- Khurshaid, T.; Wadood, A.; Farkoush, S.G.; Yu, J.; Kim, C.H.; Rhee, S.B. An improved optimal solution for the directional overcurrent relays coordination using hybridized whale optimization algorithm in complex power systems. IEEE Access 2019, 7, 90418–90435. [Google Scholar] [CrossRef]
- Haider, Z.M.; Mehmood, K.K.; Khan, S.U.; Khan, M.O.; Wadood, A.; Rhee, S.B. Optimal management of a distribution feeder during contingency and overload conditions by harnessing the flexibility of smart loads. IEEE Access 2021, 9, 40124–40139. [Google Scholar] [CrossRef]
- Wadood, A.; Khurshaid, T.; Farkoush, S.G.; Yu, J.; Kim, C.H.; Rhee, S.B. Nature-inspired whale optimization algorithm for optimal coordination of directional overcurrent relays in power systems. Energies 2019, 12, 2297. [Google Scholar] [CrossRef] [Green Version]
- Wadood, A.; Farkoush, S.G.; Khurshaid, T.; Yu, J.T.; Kim, C.H.; Rhee, S.B. Application of the JAYA Algorithm in solving the problem of the optimal coordination of overcurrent relays in single-and multi-loop distribution systems. Complexity 2019, 2019, 1–13. [Google Scholar] [CrossRef]
- Bhattacharya, S.K.; Goswami, S.K. Distribution network reconfiguration considering protection coordination constraints. Electr. Power Compon. Syst. 2008, 36, 1150–1165. [Google Scholar] [CrossRef]
- Abyaneh, H.; Al-Dabbagh, M.; Karegar, H.; Sadeghi, S.; Khan, R. A new optimal approach for coordination of overcurrent relays in interconnected power systems. IEEE Trans. Power Deliv. 2003, 18, 430–435. [Google Scholar] [CrossRef]
- Bedekar, P.P.; Bhide, S.R. Optimum coordination of directional overcurrent relays using the hybrid GA-NLP approach. IEEE Trans. Power Deliv. 2010, 26, 109–119. [Google Scholar] [CrossRef]
- Noghabi, A.S.; Sadeh, J.; Mashhadi, H.R. Considering different network topologies in optimal overcurrent relay coordination using a hybrid GA. IEEE Trans. Power Deliv. 2009, 24, 1857–1863. [Google Scholar] [CrossRef]
- Urdaneta, A.; Perez, L.; Restrepo, H. Optimal coordination of directional overcurrent relays considering dynamic changes in the network topology. IEEE Trans. Power Deliv. 1997, 12, 1458–1464. [Google Scholar] [CrossRef]
- Noghabi, A.S.; Mashhadi, H.R.; Sadeh, J. Optimal coordination of directional overcurrent relays considering different network topologies using interval linear programming. IEEE Trans. Power Deliv. 2010, 25, 1348–1354. [Google Scholar] [CrossRef]
- Afzal, M.M.; Khan, M.A.; Hassan, M.A.S.; Wadood, A.; Uddin, W.; Hussain, S.; Rhee, S.B. A comparative study of supercapacitor-based statcom in a grid-connected photovoltaic system for regulating power quality issues. Sustainability 2020, 12, 6781. [Google Scholar] [CrossRef]
- Najy, W.K.; Zeineldin, H.H.; Woon, W.L. Optimal protection coordination for microgrids with grid-connected and islanded capability. IEEE Trans. Ind. Electron. 2012, 60, 1668–1677. [Google Scholar] [CrossRef]
- Saleh, K.A.; Zeineldin, H.H.; El-Saadany, E.F. Optimal protection coordination for microgrids considering N-1 contingency. IEEE Trans. Ind. Inform. 2017, 13, 2270–2278. [Google Scholar] [CrossRef]
- Saleh, K.A.; Zeineldin, H.H.; Al-Hinai, A.; El-Saadany, E.F. Optimal coordination of directional overcurrent relays using a new time-current-voltage characteristic. IEEE Trans. Power Syst. 2014, 30, 537–544. [Google Scholar] [CrossRef]
- Saleh, K.A.; El-Saadany, E.F.; Al-Hinai, A.; Zeineldin, H.H. Dual-setting characteristic for directional overcurrent relays considering multiple fault locations. IET Gener. Transm. Distrib. 2015, 9, 1332–1340. [Google Scholar] [CrossRef]
- Wadood, A.; Kim, C.-H.; Farkoush, S.G.; Rhee, S.B. An adaptive protective coordination scheme for distribution system using digital overcurrent relays. In Proceedings of the Korean Institute of Illuminating and Electrical Installation Engineers, Gangwon, Korea, 30 August 2017; p. 53. [Google Scholar]
- Zeineldin, H.H.; El-Saadany, E.F.; Salama, M.M.A. Optimal coordination of overcurrent relays using a modified particle swarm optimization. Electr. Power Syst. Res. 2006, 76, 988–995. [Google Scholar] [CrossRef]
- Amraee, T. Coordination of directional overcurrent relays using seeker algorithm. IEEE Trans. Power Deliv. 2012, 27, 1415–1422. [Google Scholar] [CrossRef]
- Urdaneta, A.; Nadira, R.; Jimenez, L.P. Optimal coordination of directional overcurrent relays in interconnected power systems. IEEE Trans. Power Deliv. 1988, 3, 903–911. [Google Scholar] [CrossRef]
- Wadood, A.; Farkoush, S.G.; Khurshaid, T.; Kim, C.-H.; Yu, J.; Geem, Z.W.; Rhee, S.-B. An optimized protection coordination scheme for the optimal coordination of overcurrent relays using a nature-inspired root tree algorithm. Appl. Sci. 2018, 8, 1664. [Google Scholar] [CrossRef] [Green Version]
- Wadood, A.; Khurshaid, T.; Farkoush, S.G.; Kim, C.H.; Rhee, S.B. A bio-inspired rooted tree algorithm for optimal coordination of overcurrent relays. In Proceedings of the International Conference on Intelligent Technologies and Applications, Bahawalpur, Pakistan, 23–25 October 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 188–201. [Google Scholar]
- Wadood, A.; Kim, C.-H.; Khurshiad, T.; Farkoush, S.G.; Rhee, S.-B. Application of a continuous particle swarm optimization (CPSO) for the optimal coordination of overcurrent relays considering a penalty method. Energies 2018, 11, 869. [Google Scholar] [CrossRef] [Green Version]
- Khurshaid, T.; Wadood, A.; Farkoush, S.G.; Kim, C.-H.; Cho, N.; Rhee, S.-B. Modified particle swarm optimizer as optimization of time dial settings for coordination of directional overcurrent relay. J. Electr. Eng. Technol. 2019, 14, 55–68. [Google Scholar] [CrossRef]
- Mansour, M.M.; Mekhamer, S.F.; El-Kharbawe, N. A modified particle swarm optimizer for the coordination of directional overcurrent relays. IEEE Trans. Power Deliv. 2007, 22, 1400–1410. [Google Scholar] [CrossRef]
- Baghaee, H.R.; Mirsalim, M.; Gharehpetian, G.B.; Talebi, H.A.; Aghamirsalim, M. MOPSO/FDMT-basedpareto-optimal solution for coordination of overcurrent relays in interconnected networks and multi-DER microgrids. IET Gener. Transm. Distrib. 2018, 12, 2871–2886. [Google Scholar] [CrossRef]
- Darabi, A.; Bagheri, M.; Gharehpetian, G.B. Highly accurate directional overcurrent coordination via combination of Rosen’s gradient projection–complex method with GA-PSO algorithm. IEEE Syst. J. 2019, 14, 1171–1182. [Google Scholar] [CrossRef]
- Thangaraj, R.; Pant, M.; Deep, K. Optimal coordination of over-current relays using modified differential evolution algorithms. Eng. Appl. Artif. Intell. 2010, 23, 820–829. [Google Scholar] [CrossRef]
- Kim, C.H.; Khurshaid, T.; Wadood, A.; Farkoush, S.G.; Rhee, S.B. Gray wolf optimizer for the optimal coordination of directional overcurrent relay. J. Electr. Eng. Technol. 2018, 13, 1043–1051. [Google Scholar]
- Singh, M.; Panigrahi, B.; Abhyankar, A. Optimal coordination of directional over-current relays using teaching learning-based optimization (TLBO) algorithm. Int. J. Electr. Power Energy Syst. 2013, 50, 33–41. [Google Scholar] [CrossRef]
- Albasri, F.A.; Alroomi, A.R.; Talaq, J.H. Optimal Coordination of directional overcurrent relays using biogeography-based optimization algorithm. IEEE Trans. Power Deliv. 2015, 30, 1810–1820. [Google Scholar] [CrossRef]
- El-Hana Bouchekara, H.R.; Zellagui, M.; Abido, M.A. Coordination of directional overcurret relays using the backtracking search algorithm. J. Electr. Syst. 2016, 12, 387–405. [Google Scholar]
- Damchi, Y.; Dolatabadi, M.; Mashhadi, H.R.; Sadeh, J. MILP approach for optimal coordination of directional overcurrent relays in interconnected power systems. Electr. Power Syst. Res. 2018, 158, 267–274. [Google Scholar] [CrossRef]
- Khurshaid, T.; Wadood, A.; Farkoush, S.G.; Kim, C.H.; Yu, J.; Rhee, S.B. Improved firefly algorithm for the optimal coordination of directional overcurrent relays. IEEE Access 2019, 7, 78503–78514. [Google Scholar] [CrossRef]
- Bouchekara, H.; Zellagui, M.; Abido, M.; Bouchekara, H.R.E.-H. Optimal coordination of directional overcurrent relays using a modified electromagnetic field optimization algorithm. Appl. Soft Comput. 2017, 54, 267–283. [Google Scholar] [CrossRef]
- Kalage, A.A.; Ghawghawe, N.D. Optimum coordination of directional overcurrent relays using modified adaptive teaching learning based optimization algorithm. Intell. Ind. Syst. 2016, 2, 55–71. [Google Scholar] [CrossRef] [Green Version]
- Mahari, A.; Seyedi, H. An analytic approach for optimal coordination of overcurrent relays. IET Gener. Transm. Distrib. 2013, 7, 674–680. [Google Scholar] [CrossRef]
- Alipour, M.; Teimourzadeh, S.; Seyedi, H. Improved group search optimization algorithm for coordination of directional overcurrent relays. Swarm Evol. Comput. 2015, 23, 40–49. [Google Scholar] [CrossRef]
- Alam, M.N.; Das, B.; Pant, V. A comparative study of metaheuristic optimization approaches for directional overcurrent relays coordination. Electr. Power Syst. Res. 2015, 128, 39–52. [Google Scholar] [CrossRef]
- Farzinfar, M.; Jazaeri, M.; Razavi, F. A new approach for optimal coordination of distance and directional over-current relays using multiple embedded crossover PSO. Int. J. Electr. Power Energy Syst. 2014, 61, 620–628. [Google Scholar] [CrossRef]
- Saremi, S.; Mirjalili, S.; Lewis, A. Grasshopper optimization algorithm: Theory and application. Adv. Eng. Softw. 2017, 105, 30–47. [Google Scholar] [CrossRef] [Green Version]
- Singh, M.; Panigrahi, B.K.; Abhyankar, A.R.; Das, S. Optimal coordination of directional over-current relays using informative differential evolution algorithm. J. Comput. Sci. 2014, 5, 269–276. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef] [Green Version]
- Gers, J.M.; Holmes, E.J. Protection of Electricity Distribution Networks; IET: London, UK, 2004; Volume 47. [Google Scholar]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Bednarz, J.C. Cooperative hunting in Harris’ Hawks (parabuteo unicinctus). Science 1988, 239, 1525. [Google Scholar] [CrossRef] [PubMed]
- Humphries, N.E.; Queiroz, N.; Dyer, J.R.; Pade, N.G.; Musyl, M.K.; Schaefer, K.M.; Fuller, D.W.; Brunnschweiler, J.M.; Doyle, T.K.; Houghton, J.D.; et al. Environmental context explains Lévy and brownian movement patterns of marine predators. Nature 2010, 465, 1066–1069. [Google Scholar] [CrossRef] [Green Version]
- Viswanathan, G.M.; Afanasyev, V.; Buldyrev, S.V.; Murphy, E.J.; Prince, P.A.; Stanley, H.E. Lévy flight search patterns of wandering albatrosses. Nature 1996, 381, 413. [Google Scholar] [CrossRef]
- Sims, D.W.; Southall, E.J.; Humphries, N.E.; Hays, G.C.; Bradshaw, C.J.; Pitchford, J.W.; James, A.; Ahmed, M.Z.; Brierley, A.S.; Hindell, M.A.; et al. Scaling laws of marine predator search behaviour. Nature 2008, 451, 1098–1102. [Google Scholar] [CrossRef] [PubMed]
- Gautestad, A.O.; Mysterud, I. Complex animal distribution and abundance from memory-dependent kinetics. Ecol. Complex. 2006, 3, 44–55. [Google Scholar] [CrossRef]
- Shlesinger, M.F. Levy flights: Variations on a theme. Physica D 1989, 38, 304–309. [Google Scholar] [CrossRef]
- Viswanathan, G.M.; Afanasyev, V.; Buldyrev, S.V.; Havlin, S.; Da Luz, M.G.E.; Raposo, E.P.; Stanley, H.E. Lévy flights in random searches. Physica A 2000, 282, 1–12. [Google Scholar] [CrossRef]
- Alam, M.N. Adaptive protection coordination scheme using numerical directional overcurrent relays. IEEE Trans. Ind. Inform. 2019, 15, 64–73. [Google Scholar] [CrossRef]
- Alam, M.N.; Das, B.; Pant, V. An interior point method based protection coordination scheme for directional overcurrent relays in meshed networks. Int. J. Electr. Power Energy Syst. 2016, 81, 153–164. [Google Scholar] [CrossRef]



| Parameter | Values |
|---|---|
| Population Size, N | 200 |
| Maximum Iterations, T | 500 |
| Random Jump Strength, J | [0, 2] |
| Number of Variables, N_Var: | |
| For 9-Bus network | 96 |
| For 15-bus network | 84 |
| For 14-bus network | 80 |
| Relay No | TDS | PS |
|---|---|---|
| 1 | 0.1004 | 0.5018 |
| 2 | 0.1000 | 0.7857 |
| 3 | 0.1010 | 0.5048 |
| 4 | 0.1000 | 0.5000 |
| 5 | 0.1004 | 0.9900 |
| 6 | 0.1003 | 0.5016 |
| 7 | 0.1015 | 0.5426 |
| 8 | 0.1001 | 1.5942 |
| 9 | 0.1021 | 0.5287 |
| 10 | 0.1001 | 0.5004 |
| 11 | 0.1000 | 1.9928 |
| 12 | 0.1000 | 0.8153 |
| 13 | 0.1005 | 0.5477 |
| 14 | 0.1000 | 0.5800 |
| 15 | 0.1000 | 0.5530 |
| 16 | 0.1000 | 0.5048 |
| 17 | 0.1030 | 0.5000 |
| 18 | 0.1011 | 0.5154 |
| 19 | 0.1000 | 0.8906 |
| 20 | 0.1012 | 0.5000 |
| 21 | 0.1013 | 0.6588 |
| 22 | 0.1045 | 0.5067 |
| 23 | 0.1000 | 0.5226 |
| 24 | 0.1000 | 0.5000 |
| Total Operating Time | 8.7266 (s) | |
| Algorithm | Objective Function |
|---|---|
| PSO [44] | 13.9742 |
| GA [13] | 32.6058 |
| NLP [13] | 19.4041 |
| IDE [41] | 59.6741 |
| HS [40] | 9.838 |
| BBO [36] | 28.8348 |
| MTLBO [41] | 41.9041 |
| Proposed HHO | 8.7266 |
| Relay No. | CTR |
|---|---|
| 18, 20, 21, 29 | 1600:5 |
| 2–4–8–11–12–14–15–23 | 1200:5 |
| 1–3–5–10–13–19–36–37–40–42 | 800:5 |
| 6–7–9–16–24–25–26–27–28–31–32–33–35 | 600:5 |
| 17–22–30–34–38–39–41 | 400:5 |
| Relay No | HHO | Relay No | HHO | ||
|---|---|---|---|---|---|
| TDS | PS | TDS | PS | ||
| 1 | 0.1005 | 0.5027 | 22 | 0.1120 | 0.5600 |
| 2 | 0.1598 | 0.5782 | 23 | 0.1036 | 1.9400 |
| 3 | 0.1000 | 0.5000 | 24 | 0.1006 | 0.5031 |
| 4 | 0.1010 | 0.5051 | 25 | 0.1000 | 0.5000 |
| 5 | 0.1000 | 0.5000 | 26 | 0.1059 | 0.5297 |
| 6 | 0.1657 | 0.8469 | 27 | 0.1014 | 0.5072 |
| 7 | 0.2052 | 0.5006 | 28 | 0.2052 | 1.0258 |
| 8 | 0.1009 | 0.5045 | 29 | 0.1011 | 0.5054 |
| 9 | 0.1003 | 0.5015 | 30 | 0.1033 | 0.5166 |
| 10 | 0.2152 | 0.5000 | 31 | 0.2152 | 1.0760 |
| 11 | 0.1000 | 0.5000 | 32 | 0.1074 | 0.5372 |
| 12 | 0.1013 | 1.7029 | 33 | 0.1002 | 0.5010 |
| 13 | 0.1221 | 0.7558 | 34 | 0.1028 | 0.5142 |
| 14 | 0.1017 | 2.4487 | 35 | 0.1000 | 0.5000 |
| 15 | 0.1000 | 0.5000 | 36 | 0.1022 | 0.5109 |
| 16 | 0.1031 | 0.5064 | 37 | 0.1333 | 0.6666 |
| 17 | 0.1000 | 0.5000 | 38 | 0.1000 | 0.5000 |
| 18 | 0.1031 | 2.1313 | 39 | 0.1201 | 2.4678 |
| 19 | 0.1003 | 0.5016 | 40 | 0.1024 | 0.5121 |
| 20 | 0.6044 | 2.3997 | 41 | 0.1000 | 0.5000 |
| 21 | 0.1377 | 0.6885 | 42 | 0.1000 | 0.500 |
| Total Operating Time | 11.537 (s) | ||||
| Algorithm | Objective Function |
|---|---|
| SA [24] | 12.227 |
| MINLP [24] | 15.335 |
| AA [42] | 11.6618 |
| DE [44] | 11.7591 |
| HS [44] | 12.6225 |
| BSA [37] | 16.293 |
| MTLBO [41] | 52.5039 |
| GSO [43] | 13.6542 |
| IGSO [43] | 12.135 |
| MEFO [40] | 13.953 |
| Proposed HHO | 11.537 |
| CT Ratio | Relay No | CT Ratio | Relay No |
|---|---|---|---|
| 8000/5 | 1 | 1000/5 | 20, 35, 38 |
| 5000/5 | 29 | 800/5 | 16, 18 |
| 4000/5 | 5, 25 | 600/5 | 22, 32, 37, 40 |
| 3500/5 | 3, 14 | 500/5 | 17, 26, 34 |
| 3000/5 | 21 | 400/5 | 2, 4, 8, 10, 13, 24 |
| 2500/5 | 7 | 250/5 | 11 |
| 2000/5 | 12, 36, 39 | 200/5 | 6 |
| 1600/5 | 9, 19, 23, 27, 31 | 50/5 | 28 |
| 1200/5 | 15, 30, 33 | - | - |
| Relay No | HHO | Relay No | HHO | ||
|---|---|---|---|---|---|
| TDS | PS | TDS | PS | ||
| 1 | 0.1000 | 0.5898 | 21 | 0.1007 | 0.5842 |
| 2 | 0.1000 | 0.5120 | 22 | 0.1081 | 0.5606 |
| 3 | 0.1001 | 0.5000 | 23 | 0.1003 | 0.9667 |
| 4 | 0.1000 | 0.5021 | 24 | 0.1021 | 0.6392 |
| 5 | 0.1000 | 0.7892 | 25 | 0.1089 | 0.6451 |
| 6 | 0.1101 | 0.5001 | 26 | 0.1021 | 0.6667 |
| 7 | 0.1012 | 0.5000 | 27 | 0.1013 | 0.5799 |
| 8 | 0.1000 | 0.7204 | 28 | 0.1049 | 0.5959 |
| 9 | 0.1018 | 0.5353 | 29 | 0.1052 | 0.5462 |
| 10 | 0.1010 | 0.8633 | 30 | 0.1071 | 0.5622 |
| 11 | 0.2196 | 0.7160 | 31 | 0.1000 | 0.6141 |
| 12 | 0.1000 | 0.5779 | 32 | 0.1001 | 0.5601 |
| 13 | 0.100 | 0.5000 | 33 | 0.1014 | 0.5000 |
| 14 | 0.1012 | 0.9390 | 34 | 0.1048 | 0.5443 |
| 15 | 0.1131 | 0.7789 | 35 | 0.1040 | 0.5970 |
| 16 | 0.1004 | 0.6082 | 36 | 0.1000 | 0.9009 |
| 17 | 0.1115 | 0.5263 | 37 | 0.1028 | 0.6388 |
| 18 | 0.1028 | 0.5023 | 38 | 0.1029 | 0.5727 |
| 19 | 0.1193 | 0.8656 | 39 | 0.1049 | 0.5014 |
| 20 | 0.1015 | 0.7498 | 40 | 0.1095 | 0.5376 |
| Total Operating Time | 12.9274 (s) | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Irfan, M.; Wadood, A.; Khurshaid, T.; Khan, B.M.; Kim, K.-C.; Oh, S.-R.; Rhee, S.-B. An Optimized Adaptive Protection Scheme for Numerical and Directional Overcurrent Relay Coordination Using Harris Hawk Optimization. Energies 2021, 14, 5603. https://doi.org/10.3390/en14185603
Irfan M, Wadood A, Khurshaid T, Khan BM, Kim K-C, Oh S-R, Rhee S-B. An Optimized Adaptive Protection Scheme for Numerical and Directional Overcurrent Relay Coordination Using Harris Hawk Optimization. Energies. 2021; 14(18):5603. https://doi.org/10.3390/en14185603
Chicago/Turabian StyleIrfan, Muhammad, Abdul Wadood, Tahir Khurshaid, Bakht Muhammad Khan, Ki-Chai Kim, Seung-Ryle Oh, and Sang-Bong Rhee. 2021. "An Optimized Adaptive Protection Scheme for Numerical and Directional Overcurrent Relay Coordination Using Harris Hawk Optimization" Energies 14, no. 18: 5603. https://doi.org/10.3390/en14185603
APA StyleIrfan, M., Wadood, A., Khurshaid, T., Khan, B. M., Kim, K.-C., Oh, S.-R., & Rhee, S.-B. (2021). An Optimized Adaptive Protection Scheme for Numerical and Directional Overcurrent Relay Coordination Using Harris Hawk Optimization. Energies, 14(18), 5603. https://doi.org/10.3390/en14185603