1. Introduction
The offshore wind industry provides a reduced-emissions form of energy production that is continuously gaining importance. Its annual growth rate averaged 24% between 2013 and 2020 [
1]. With the newly installed capacity of 6.1 GW offshore wind, the total installed capacity reached 35.3 GW globally in 2020 [
1,
2]. The global offshore wind market outlook illustrates this continuous importance of the wind industry: annual installations of around 20 GW are expected in 2025, and up to 30 GW in installations are expected in 2030 [
1]. Key government and industry bodies are setting their sights significantly higher for offshore wind in 2050. In the EU, 450 GW is the target capacity for 2050, assuming industrial clusters in the North Sea, Atlantic Ocean, Baltic Sea, and southern European water areas [
1]. As for global development, the Ocean Renewable Energy Action Coalition (OREAC)—a global group of leading offshore wind development companies, technology providers, and turbine suppliers—announced, in March 2019, their expectation of more than 1400 GW of installed capacity worldwide within the next 30 years [
3]. Furthermore, the Global Wind Energy Council (GWEC) predicts more than 70 GW of offshore capacity will be added worldwide in 2021–2025 [
1]. In 2020, Europe had total offshore wind electricity production of 83 TWh, which corresponds to 2.9% of the EU’s total electricity consumption in 2020 (2.797 TWh consumption in the EU) [
4]. This trend also has economic implications, reflected by the prediction that by 2030 offshore wind power shall be responsible for 8% of the total ocean economy, adding USD 230 billion in value [
5].
Besides the economic implications, offshore wind farms (OWFs) are confronted with safety and security threats. These threats are recognized as risks relate to, but are not limited to, (I) personal safety, (II) the environment, (III) assets, and/or (IV) organizations [
6]. These are the results, in part, of their harsh marine environment—e.g., distance to shore, weather impact, access, and egress. Further, the considerable complexity of the assets and stakeholders, and their role in power generation contribute to the safety and security threats and risks. For example, during the operation and maintenance (O&M) phase, failing components are recurring obstacles in OWFs, requiring well-established maintenance processes [
7]. These failing components could be risks to the health and safety of employees on site. As the O&M phase progresses, the risk of, e.g., material fatigue, increases. Consequently, these processes are prone to further challenges in terms of safety and security. The earlier (ideally during the planning phase) safety and security threats and their associated risks are identified and classified, the higher the chances of reducing the risks to acceptable levels by implementing measures. This can be done, for example, as part of a risk assessment, and as part of further studies, such as hazard identification studies (HAZIDs) and hazard and operability studies (HAZOPs). Inevitably, risks and measures undertaken must be continuously examined for their effectiveness, and if necessary, improved.
Generally, a key performance indicator (KPI) is used as a performance metric for a specific business activity [
8]. It contains information relevant to the application context, which is determined by specific stakeholder interests: e.g., operation, finance, maintenance, and safety [
9]. It is used to define goals or evaluate what has been achieved. KPIs can be measured directly, are determined using performance indicators of the subsystems involved and other factors, or are derived from expert surveys [
9,
10]. In order to achieve clear statements and comparability, it is important that the measurement and formation rules of KPIs are well defined. In the best case, a KPI is standardized, traceable over time, and comprehensible in its meaning. Comparisons between achieved and target KPIs provide stakeholders the information needed to assume that problems have occurred or are emerging. The differences observed can be considered as key risk identifiers (KRIs), describing the current risk profile of the system or organization [
11]. This makes KPIs attractive for evaluating and monitoring safety and security.
Meanwhile, KPIs are also widely used in the wind industry to define performance metrics in contracts, for operations management, and in decision support systems. A comprehensive list of OWF KPIs is presented in [
9,
12]. There, KPIs are classified in terms of their applications: OWF performance; maintenance; reliability; and health, safety, and environment (HSE). The International Electrotechnical Commission (IEC) has already developed guidelines and standards that define KPIs for wind turbine design and operation [
13,
14]. In addition, several studies have discussed the use of KPIs for operations management and maintenance of offshore and onshore wind turbines [
12,
15]. Safety-related KPIs discussed in [
9,
12,
16,
17] refer either to more technical aspects (reliability), to the occupational safety of the O&M personnel (health, injury prevention), or to the handling of disruptive environmental influences (weather). The relationships between safety and security requirements and economic, environmental, and regulatory compliance requirements are rarely discussed [
16,
18]. These interrelations become more important when the resilience of OWFs as part of the transnational energy supply becomes the focus of an investigation [
19]. In this study, the main stakeholder goals in OWFs were classified on a functional level, the interrelations were elaborated using the functional resonance analysis method [
20], and Monte-Carlo simulations were performed to determine the functions of OWFs with highest vulnerability potential. In [
21], the authors proposed an extension of that model by adopting Bayesian network (BN) analysis. That approach made the first steps in enabling the exploration of cross-system interrelations.
In this work, and based on the work presented by [
19], we continue to improve the BN-model presented in [
21]. The aim is to end up with a more formal approach for exploring relations within OWFs in terms of safety and security. Using the resulting model, and with help of expert knowledge, one can determine how a failing function impacts other functions in this complex system and can design changes—e.g., the hardening of selected functions—influencing the system’s stability.
The rest of this work is structured as follows.
Section 2 reviews the important items, such as OWFs (see
Section 2.1), BNs (see
Section 2.2), the functional resonance analysis method (FRAM; see
Section 2.3), and the stakeholder view (see
Section 2.4).
Section 3 describes the methodology adopted in this work.
Section 4 presents the expert knowledge and stakeholder goals. The model is presented on
Section 5. The results and implications are discussed in
Section 6. Conclusions are summarized in
Section 7.
3. Methodology
This section outlines the proposed methodology of the expert-driven probabilistic assessment of the safety and security of OWFs. The development of the methodology was driven by the observation that the high complexity of socio-technical systems such as OWFs, in combination with the assessment of safety and security, does not allow for purely quantitative solutions, as discussed by [
34]. Nevertheless, we believe that the access to expert knowledge should be realized in a structured manner to provide an applicable outcome of the assessment. It is important to note that this analysis is not meant to replace a classical risk assessment. However, it offers the application of expert knowledge to improve the assessment of the safety and security of this complex socio-technical system.
The first step of the proposed methodology is the
survey and analysis of stakeholder goals, which is a standard procedure for stakeholder assessment [
35]. Therefore, the stakeholders and experts were consulted for general goals and objectives in terms of safety and security in OWF. Next, specific goals and related measures and sensor systems were identified. Due to the complexity of these goals, measures and sensor systems are only described on a high level (abstractly). Consequently, one has to understand the results produced by this methodology as a qualitative measure of the safety and security aspects.
The following step is the
expert-driven structuring, which focuses on determining and characterizing the interrelations among specific goals, measures, and senors systems. Therefore, the type of interrelation between each function is determined by applying the categories (aspects) provided by FRAM (see also
Section 2.3), i.e., input, output, precondition, resource, control, and time. The following characterization was motivated by the intention of this work to assess how failing elements and services of an OWF can impact its safety and security. Therefore, for each function, a failure probability was defined. The available options were restricted to a discrete set of values, i.e., low, medium, and high, to acknowledge the high level of abstraction. Furthermore, the impact a failure of a function has on the operability of the depending functions was weighted, too. Again, only a discrete set of options existed.
In the third and final step, the generation of probabilistic model, the generated FRAM model is transferred into a BN. This allows one to estimate impact of failing functions on the safety and security of the whole system in probabilistic terms. Note, this analysis does not replace a classical risk assessment but offers the use of expert knowledge for simulating and thus predicting possible critical situations.
5. The Transfer to a Probabilistic Model
This section presents the third and final step, i.e., the transfer of the functional model to a probabilistic model (see also
Section 3). From now on, the words node and function are used indistinguishably. With the functional model and the relevant functions at hand, it is time to define their failure probabilities and the parameterized interrelations. This information must be used to analyze how the failure probabilities of functions are interconnected. Therefore, BNs are employed, which enable this kind of analysis.
In a first step, the architecture of the functional model (see also
Figure 2) is converted into a BN one by transforming each function into a node
and the exchange connections into edges of the BN. Each node can take one of two distinct states:
, i.e., working, and
, i.e., broken.
In the second step, the probabilities of the nodes are defined. As already mentioned, the probability of a given node depends on whether it is an
independent or
dependent one. For the former case, the probability of failure (
) is given by:
where
refers to the probability of failure of node
given in
Table 8.
As for the dependent nodes, CPTs are generated for every node by combining the inherent failure probability and the influencing factors.
As discussed in the previous section, a
supportive dependence means that a failure of a parent node
increases the
inherent failure probability by a factor
; i.e.,
. In contrast, a
compulsory dependence means that a failure of a parent node
increases the probability that
enters the failure state
, too, by the value
, i.e.,
. Consequently, for each combination of parent states, the respective row in the CPT can be computed in the following way:
with
and
being the sets of supportive and compulsory relations between nodes, respectively. In order to have a better understanding of Equation (
3),
Appendix A picks up two exemplary cases of a network with two and three nodes, respectively, and shows their explicit forms.
Having defined the probabilistic model (i.e., Equations (
2) and (
3)), the failure probability
of a node
can be obtained by considering the discrete values of
and
of low, medium, and high, respectively, presented in
Table 8.
Table 9 lists the respective numeric values according to
supportive and
compulsory dependence.
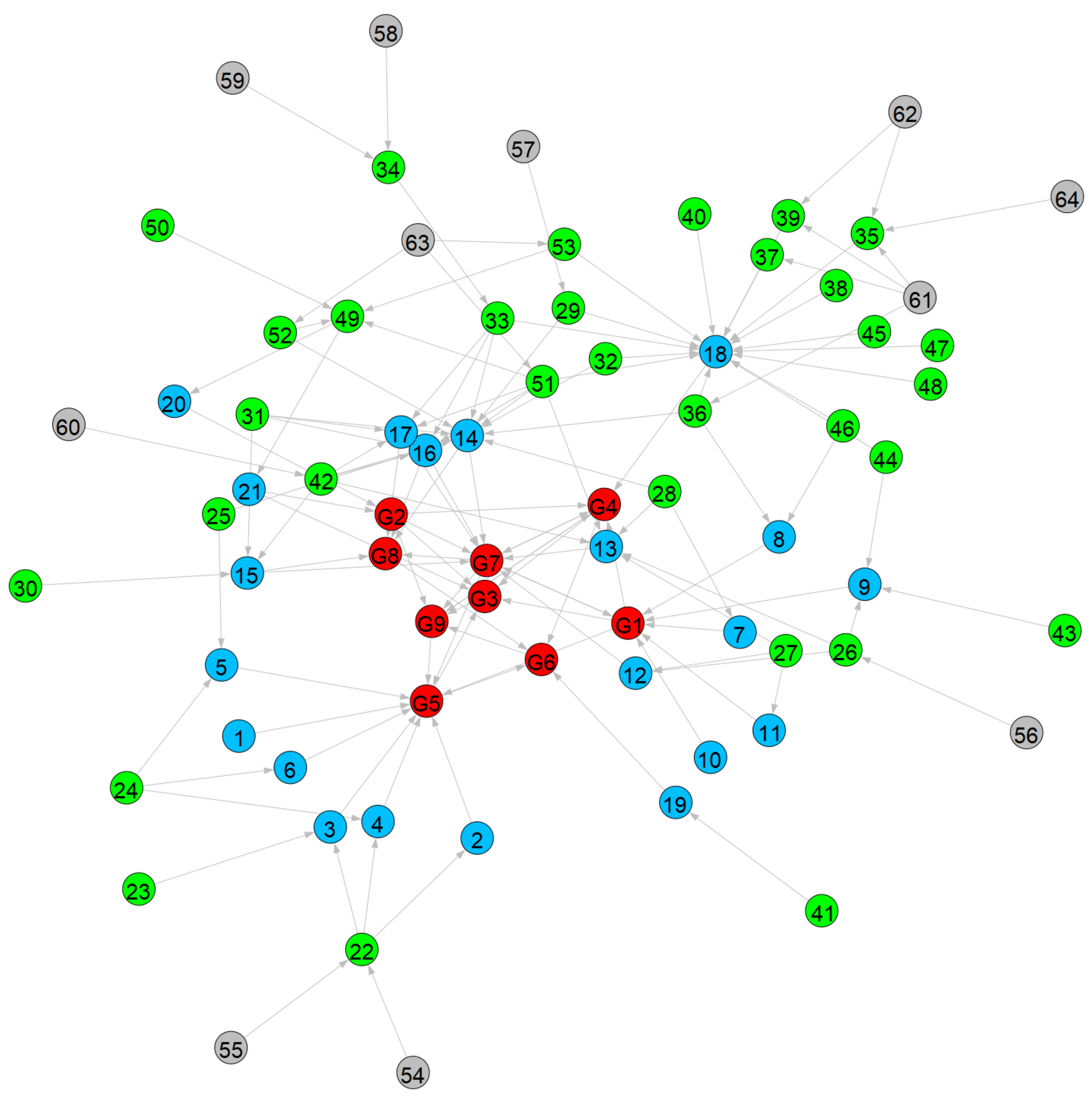
Figure 3 shows the resulting BN model in the context of the safety and security of OWFs. The network has a total of twenty seven
independent nodes and thirty seven
dependent nodes (see also
Section 4.1 of [
21]). The edges are presented in different colors according to their
dependence.
Compulsory dependence corresponds to the FRAM aspect: input (black).
Supplementary dependence consists on the following FRAM aspects: preconditions (red), controls (orange), and resource (purple).


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







