1. Introduction
The advancement of technology and automation has led to the widespread use of electric motors in many applications. Brushed DC motors are used in various industrial sectors and a wide range of consumer products such as pumps, air fans, and so on. These drives are also commonly used in the automotive industry, as automobile starters, window lifters, windshield wipers, etc. However, brushed DC motors require more attention to maintenance due to the commutator and brushes. The mechanical commutator is the most vulnerable component and the main practical problem of these motors. This component may also limit the maximum speed of the DC motor due to its mechanical endurance. A mechanical sensor coupled to a motor shaft is required to obtain information about the speed or position of the motor. Sensors such as the resolver, encoder, Hall effect sensor, and tachometer are commonly used. However, the overall cost of a DC drive system increases significantly with the addition of such a sensor, which is prone to failure in industrial environments. The sensor reliability is remarkably affected by environmental conditions that the sensor is exposed to, such as dust, pollution, vibrations, and temperature. A sensorless speed or position estimation can be used to minimize the cost and issues associated with the sensors in a DC drive system. The main advantages of the removal of such sensors and using a sensorless algorithm are decreased maintenance, decreased drive volume, a reduced number of connections, and a reduced cost of the final system. The sensorless algorithms are also used as a redundant solution in case of a sudden failure of the mechanical sensor. These algorithms can be divided into two groups: those based on the dynamic model of the DC motor and those based on the ripple component of the motor current.
The methods based on the dynamic model of DC motor depend on the parameters of the brushed DC motor such as the resistance, inductance, and back-emf constant. However, these parameters are not constant, and they vary under different operational conditions, for example, with temperature. Varying parameters then lead to uncertainty in speed estimation. Nevertheless, these parameters can be estimated dynamically [
1], but this approach usually leads to a nonlinear model, which is more difficult, and increased computational time is required. Some techniques indirectly model a motor with the use of neural networks [
2] or the Kalman filter [
3]. The combination of neural networks and Sliding mode control was used in [
4]. Sensorless speed control for very small, brushed DC motors with an adaptive estimator was presented in [
5].
The methods based on the ripple component of motor current do not require any knowledge of motor parameters to obtain information about the rotor speed because the motor current already contains this information. The measured motor current is mainly composed of two components: a DC component and an AC component, also known as the ripple component. The DC component is responsible for providing torque to the motor, and its amplitude depends on a motor load. The AC component is created by converting the DC current supplied by a stationary source into an AC current in an armature coil by the commutator and brushes. It should be noted that the AC component contains a ripple, which is directly proportional to the rotor speed. According to the fact that the number of ripples in the measured motor current per one rotation is constant, the rotor speed can be estimated. There are some methods that use the ripple component of the brushed DC motor to estimate the rotor speed.
An adaptive filter was used to estimate the rotational speed in [
6], specifically Adaptive Line Enhancer (ALE). Simulation studies of the ALE are presented within the paper but without experimental verification. The authors stated in the paper that they would like to examine the range and the accuracy of the estimated speed as well as the load effect in practice.
The support vector machines were applied in [
7], where the rotor speed was estimated by using the inverse distance between the detected pulses, and the position was estimated by counting all detected pulses. The paper shows good results, but there is no explanation for why the results were not presented for the low speeds, specifically under 501 rpm. In the paper, a response of the proposed method to the applied load is not available either. The paper presented an interesting sensorless method with speed detection from ripple current but without controlling the speed. The complexity of the proposed method also requires a microcontroller with higher computational power, due to plenty of mathematical operations.
The method based on measuring the inductive spikes generated when the motor is turned off was proposed in [
8]. The estimated speed was used as a feedback value to the speed controller, while the speed was measured in steady state. The authors declare that it would be of great interest to have an analysis of dynamic behavior and how to optimize a speed controller.
Another approach [
9] used the spectral components of the motor current. This method is also useful for the brushed DC motors with a large number of coils where the ripple component is almost negligible. The proposed method was tested within a small speed range, specifically from 2000 rpm to 3000 rpm, without a control structure. The proposed method contains a lot of mathematical operations, which could lead to higher computational requirements.
Texas Instruments made an application note [
10] where an analog bandpass filter was used to count ripples in the form of pulses, which requires the use of additional hardware. This approach used the pulse counting technique without controlling the motor speed or position.
Microchip made a similar application note [
11], where a ripple counting technique was proposed. They also provide a software implementation of the proposed sensorless method to the microcontroller unit. The main goal of this counting implementation is to count all the ripples until the number of expected ripples is reached. This approach is very suitable to control the motor position by counting pulses. However, a way to control the rotor speed was not the scope and purpose of the application note, so it was not presented.
In [
12], the comparison between the model-based and non-model-based methods is presented. The model-based methods experimentally verified in this article are specifically the pseudo-sliding mode observer and the observer with a PI controller. However, limited accuracy was detected for these methods. According to this fact, they were compared to the non-model-based method, which is deeply investigated in this article.
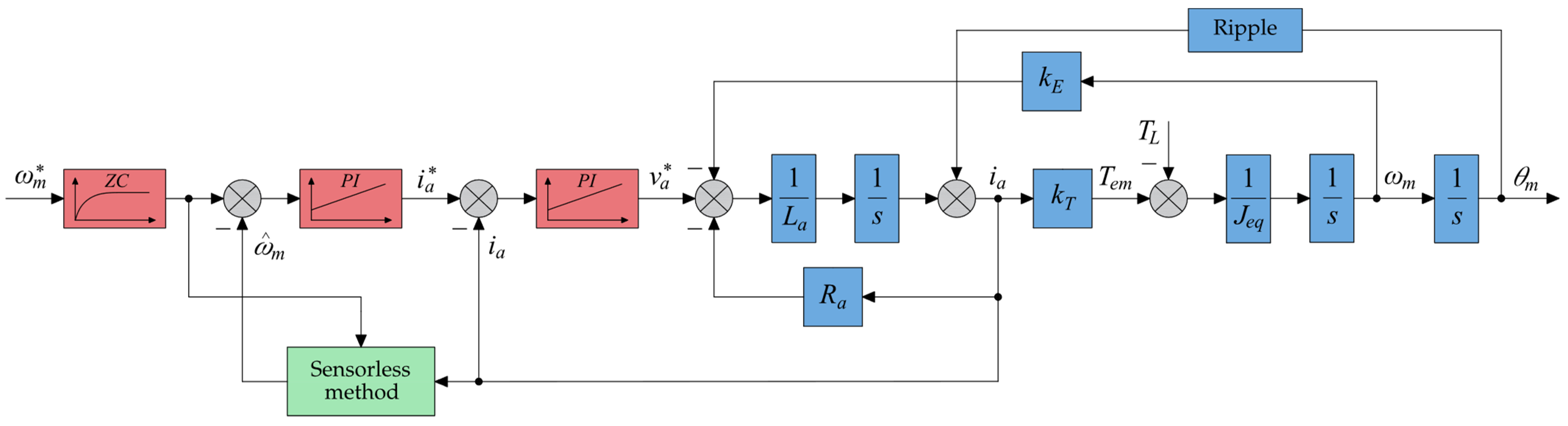
The above-mentioned methods have shown some advantages and disadvantages. The main idea of this paper is to provide low-cost sensorless speed control of brushed DC motor independent of the motor parameters. In the above-mentioned methods, there was not a clear statement about the motor operation at low speeds. This article provides an analysis of the proposed sensorless method in the whole speed range. The method of optimizing the controllers will be also revealed, as well as a detailed analysis of the ripple occurrence in the brushed DC motor current. The main parts of the current ripple signal processing are composed of a discrete bandpass filter with floating bandwidth, discrete comparator, and timer peripheral on the microcontroller unit. The discrete bandpass filter with floating bandwidth as well as the discrete comparator will be used to perform the conversion of the ripple current to the pulses. Afterward, pulses will not be counted, but their length will be measured with a timer peripheral to estimate the rotor speed. The estimated speed will be used as a feedback value for a speed controller. The cascade control structure with the speed and current controller is used to provide sensorless speed control.
3. Proposed Sensorless Method
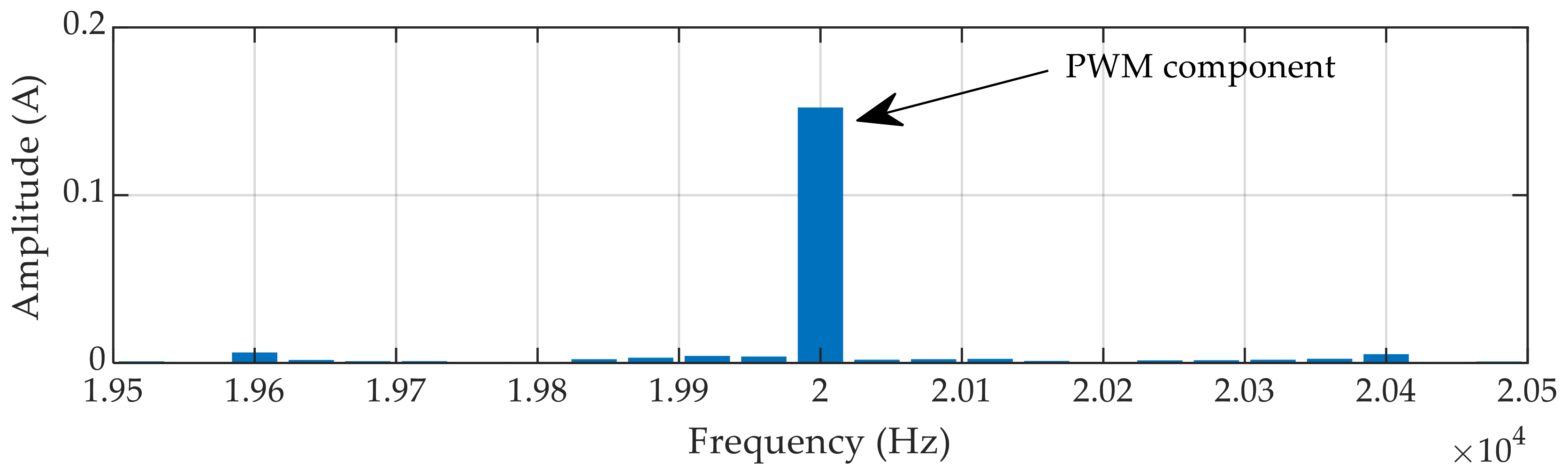
This section presents the non-model-based sensorless method used to estimate the speed of the brushed DC motor from the measured motor current. The purpose of employing the non-model-based method is to have a parameter-independent method which is accurate, simple to implement, and does not have large computational requirements. In this method, it is necessary to know the exact frequency of the current ripple to extract information about the rotor speed from the measured motor current. It is clear from Equation (11) that the frequency of the current ripple is proportional to the rotor speed and therefore changes in the frequency domain. This frequency can be extracted by the discrete bandpass filter, which is used for eliminating the DC component with frequency , the PWM component with frequency , and the other spectral components from the motor current. A bandwidth of the bandpass filter has to be chosen appropriately to eliminate frequencies, which are not coupled to the rotor speed.
The first option is to use a wide bandwidth, with the bottom and top cut-off frequencies
and
, respectively (
Figure 8). The purpose of this approach is to cover an area of the ripple component for the lower rotational speed
and the higher rotational speed
. However, this may lead to uncertainties in speed estimation because the ripple component coupled to the rotational speed is influenced by the other spectral components with smaller amplitude, as can be seen practically from the FFT in
Figure 6. This approach can be performed either externally with the analogue bandpass filter or internally by the discrete bandpass filter.
The second option is to use a narrower bandwidth whose position is floating in the frequency domain according to the required rotor speed (
Figure 9). Therefore, the ripple component at rotational speed
or
no longer contains most of the other spectral components, which are not corresponding to the rotor speed, and the speed can be estimated more accurately. This approach can be performed only by the discrete bandpass filter, which allows for appropriate bandwidth variation according to the rotor speed. The bandwidth variation is provided by means of the offline precalculated coefficients of the discrete bandpass filter. The coefficients can be calculated with the following MATLAB function:
which returns the transfer function coefficients for the
filter, for example, lowpass, highpass, bandpass, or bandstop. The resulting bandpass and bandstop designs are of order
with normalized cut-off frequency
. Solving Equation (13) for a given type of filter and cut-off frequency will produce five coefficients:
,
,
,
,
. These coefficients can be implemented into a microcontroller unit with the polynomial approximation or Look-up-table (LUT). In this paper, polynomial approximation was used, yielding lower computational requirements.
The output of the bandpass filter then provides a clean AC signal, which corresponds to the actual rotor speed. This signal is compared to a reference value to convert the ripples to pulses with a frequency equal to the frequency of the current ripple. The timer peripheral on a microcontroller unit is used to measure the length of each pulse, and the rotor speed can be estimated. The processing of the ripple current is performed by the microcontroller unit, thus without the use of any external components. The conversion of the measured motor current to the pulses is shown in
Figure 10.
The block diagram of the current signal processing is presented in
Figure 11 and the corresponding flowchart in
Figure 12. The created pulses are used as an input to the timer peripheral (Low power interrupt timer—LPIT) to obtain information about the estimated speed. The variable
in the flowchart represents the estimated speed scale constant. The data (
Figure 10) were measured by a real-time debug monitor and the data visualization tool FreeMASTER. This tool has a limit for the number of recorded samples, so the high-frequency signal from PWM, as it is visible in
Figure 5, is not presented in
Figure 10.
5. Experimental Results
The tests were performed on the 3-phase low voltage power stage controlled as a full bridge DC/DC converter with apparent power up to 420 VA. The nominal apparent power and nominal current of the power stage are 300 VA and 20 A, respectively. The power stage was made by the author for the dual-motor control applications. However, as
Table 2 yields, the no-load current of the experimental motor is 1.2 A. It has to be pointed out that the apparent power of 300 VA is just the nominal value of the power stage, but not the nominal power of the experimental system. The brushed DC motor with a stationary magnetic field generated by permanent magnets was used for the experiments. The motor parameters are given in
Table 2. As the microcontroller unit, a S32K144EVB from NXP Semiconductors was used, which is a low-cost evaluation and development board for general purpose automotive applications. The S32K144EVB is based on the 32-bit Arm
® Cortex
®-M4F S32K14 and offers a standard-based form factor compatible with the Arduino
® UNO pin layout, providing a broad range of expansion board options for quick application prototyping and demonstration. The communication between S32K144EVB and PC is provided by serial and debug adapter OpenSDA. It secures a bridge between PC and the embedded target processor, which can be used for debugging, flash programming and serial communication. The control algorithm was created in the S32 Design Studio for Arm
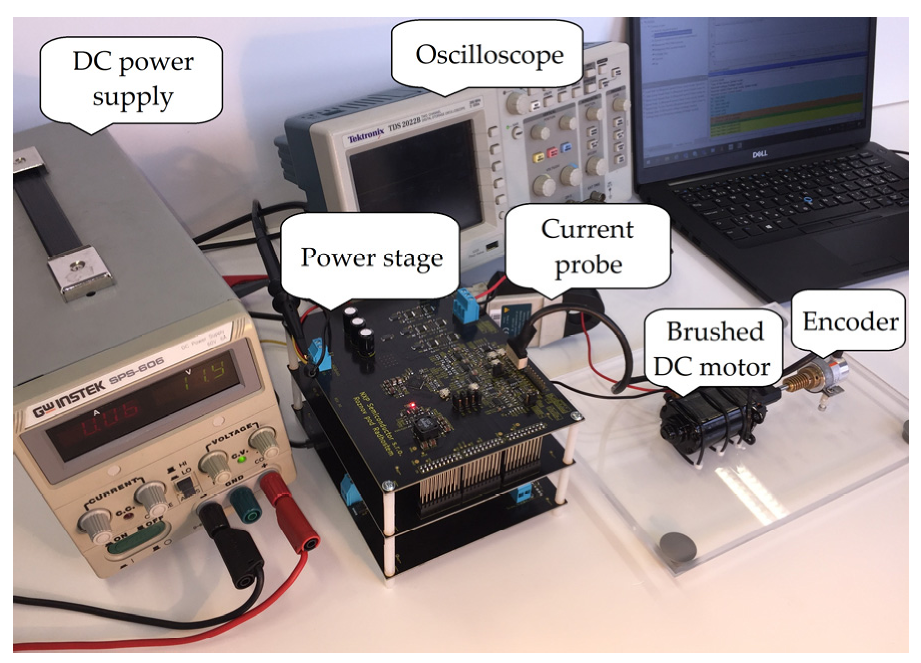
®, which is a complimentary Integrated Development Environment (IDE) for automotive and ultra-reliable Arm-based microcontrollers that enable editing, compiling, and debugging of designs. The current was measured on the low voltage power stage by the 5 mΩ shunt resistor with the sampling frequency equal to 20 kHz. An incremental encoder with 2048 pulses per one rotation was attached to the motor shaft to provide reliable information about the actual rotor speed. The oscilloscope Tektronix TDS 2022B was used to provide motor current figures with a high number of samples. The speed data was measured by a real-time debug monitor and data visualization tool FreeMASTER. The photo of an experimental setup is shown in
Figure 22 and
Figure 23.
Figure 24 shows the comparison between the actual and estimated rotor speed for a speed step from 0 rpm to 3000 rpm, and
Figure 25 shows the error between these speeds.
A motor start-up was provided in the open loop. At the speed of 700 rpm, the estimated speed was set as a feedback value to the speed controller. This method is not suitable for speeds below 700 rpm, which is the main limitation of this method. The reason is that below this speed, the frequency of the current ripple is small enough. Therefore, the control algorithm does not have enough information about the rotor speed from the measured current to provide reliable speed control. It can be compared to a sensor having a low number of references about the rotor speed per one rotation. The value of the threshold speed for controlling the motor speed appropriately depends on the motor construction parameters from Equation (9). For example, motors with a larger number of commutator segments provide enough information about the rotor speed also at the low speeds. That is due to the higher frequency of the current ripple. However, as was already mentioned in
Section 2, a larger number of commutator segments will lead to a smaller amplitude of the current ripple, which may lead to more difficult signal processing.
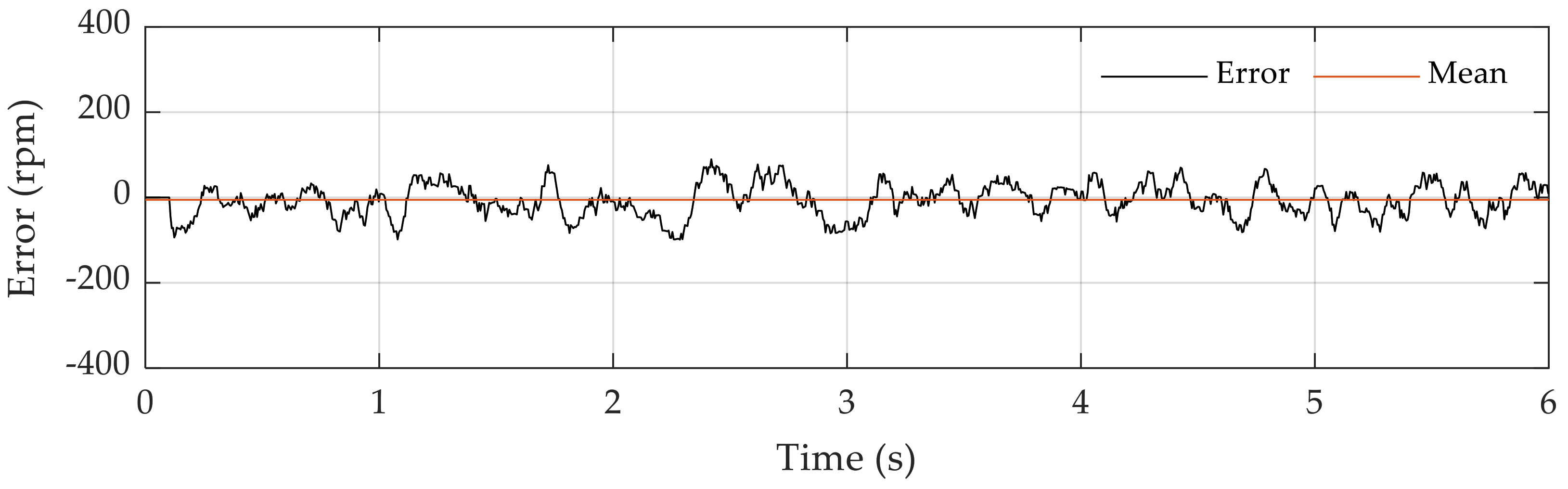
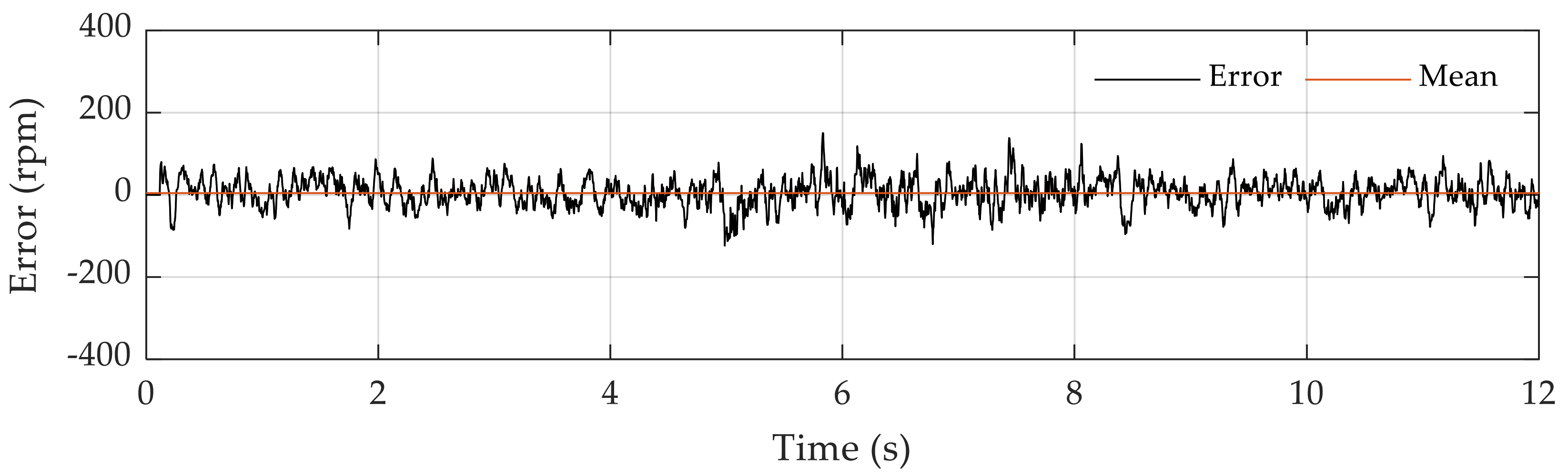
Figure 26 shows the comparison between the same speeds, but for stepped changes of required speed from 0 rpm to 6000 rpm.
As in the previous case, the estimated speed was set as a feedback value at 700 rpm. This test was performed to show the accuracy of the proposed method for a wide speed range. The error between the actual and estimated speed is shown in
Figure 27, where the mean value of the error is about 1.907 rpm, which is 0.032%. According to the results obtained from
Figure 26 and
Figure 27, it can be said that this method works accurately in a tested speed range, which was from 700 rpm to speed 6000 rpm. The tested range presents 88.333% of the whole speed range. It is worth mentioning that this method has the potential to work also for very high-speed DC motors. At very high speeds, the number of ripples per one rotation is adequate to control the motor speed.
One can observe that the ripple of the estimated speed is increasing with a higher rotational speed. This phenomenon is a result of the DC motor nonlinearities. In the higher speeds, there are frequencies, which are very close to the frequency of the current ripple related to the commutation process. As a result, the output of the discrete band-pass filter is not a clean AC signal. According to this fact, pulses created by the comparator will have different lengths. These lengths are measured by the timer, leading to the presence of the ripple in the estimated speed. However, it is possible to reduce the ripple in the estimated speed by choosing the smaller bandwidth of the proposed filter. Nevertheless, it is not a necessary condition because the ripple is not presented in the actual rotor speed, measured by the mechanical sensor, due to the PI controllers located in the cascade control structure. The PI controller acts as a filter, which is eliminating the ripple from the feedback estimated speed.
Figure 28 and
Figure 29 reveal that the proposed sensorless method also works correctly under load conditions. During the motor operation, a load of 0.002 Nm was applied to the rotor shaft. It shows the robustness of the proposed sensorless method against step change of the load torque.
The proposed sensorless method works even better under load conditions due to the current ripple resolvability (
Figure 30). This figure shows the motor current at three different load conditions. It can be seen from the figure that with the higher applied load, not just the amplitude of the DC component is increased but also the amplitude of the presented AC component due to the commutation process.
Most of the motors are used in applications where the load is coupled to the rotor shaft or its value changes during motor operation. According to this fact, the proposed sensorless method is suitable for such applications. The experimental motor is primarily used for window lifter applications in the automotive sector, where the Hall effect sensor is used as a mechanical sensor. The applications where the proposed sensorless approach would see a real benefit in the case of speed control are applications such as pumps, fans, and so on. The position control with the proposed sensorless approach could expand an application area to the automotive industry in applications such as window lifters, seat positioning, sunroofs, and so on.
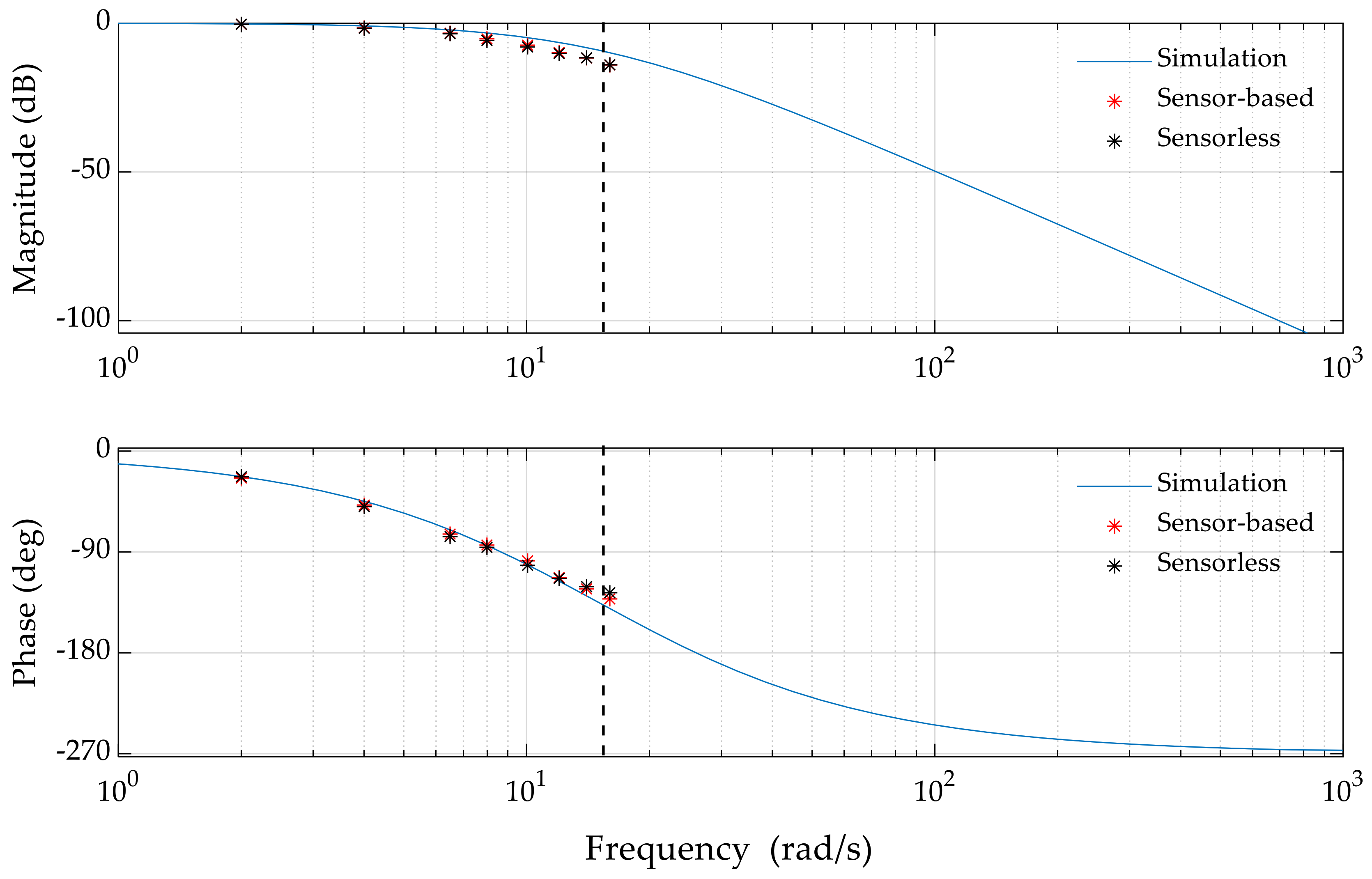
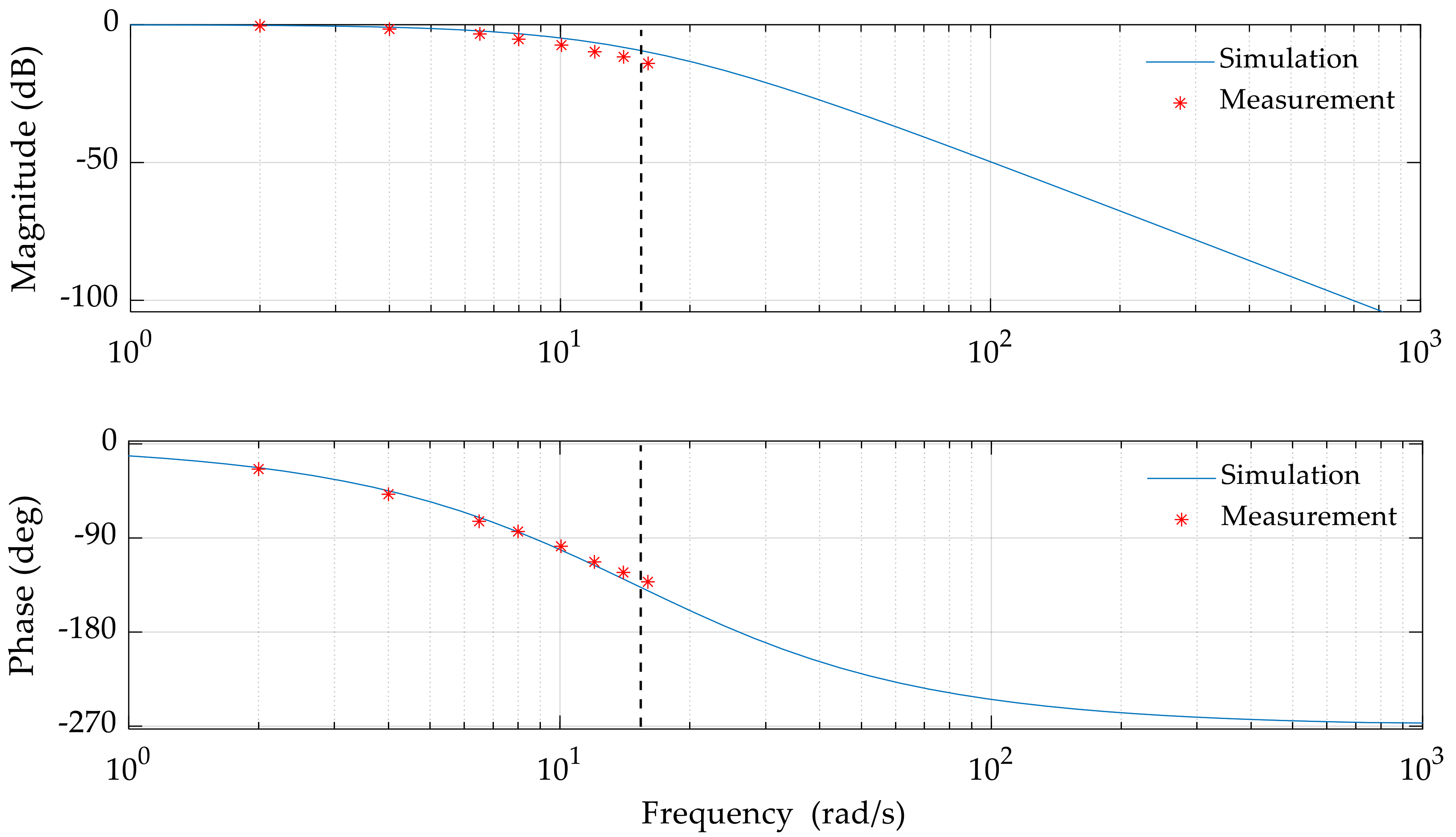
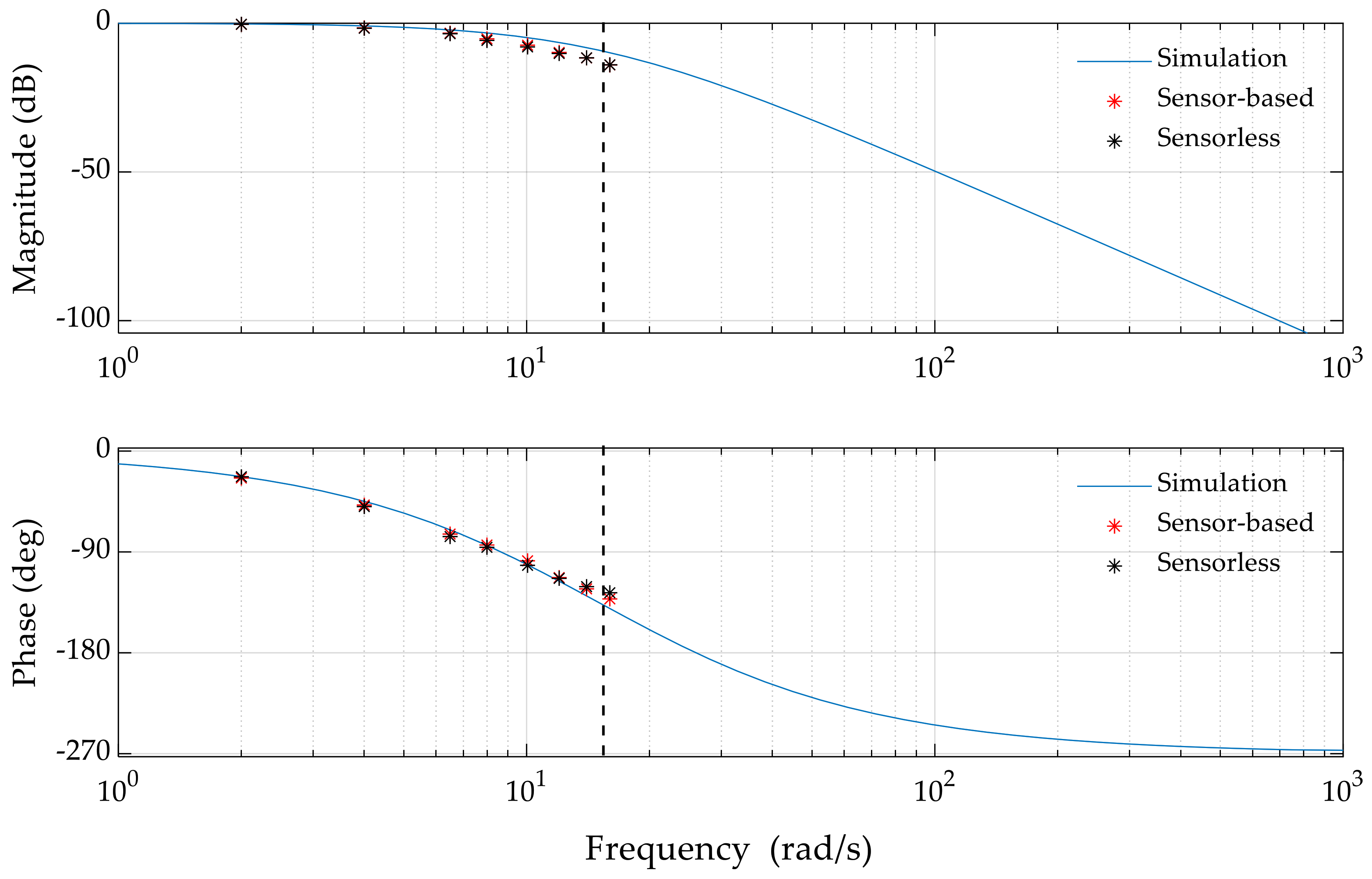
Figure 31 shows the Bode plot of the speed loop for sensor-based and sensorless control with a very good match. The results were compared to the ideal transfer function from the simulation. The dashed line in the figure shows the natural frequency of the speed loop, which is 15 rad/s in both cases.


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}