
Modeling and Control Design Based on Petri Nets Tool for a Serial Three-Phase Five-Level Multicellular Inverter Used as a Shunt Active Power Filter

 , , , and
, , , and 
Abstract
:1. Introduction
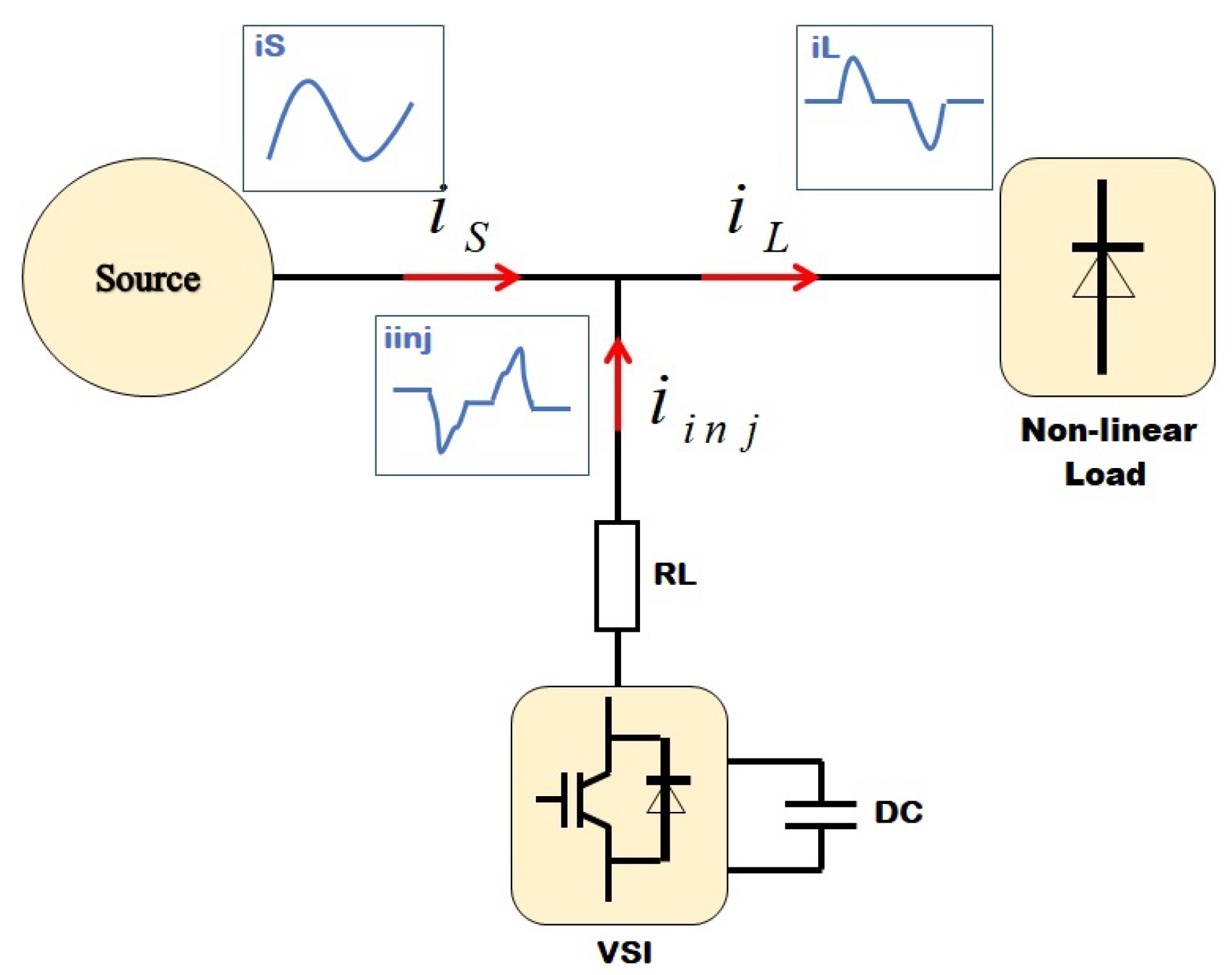
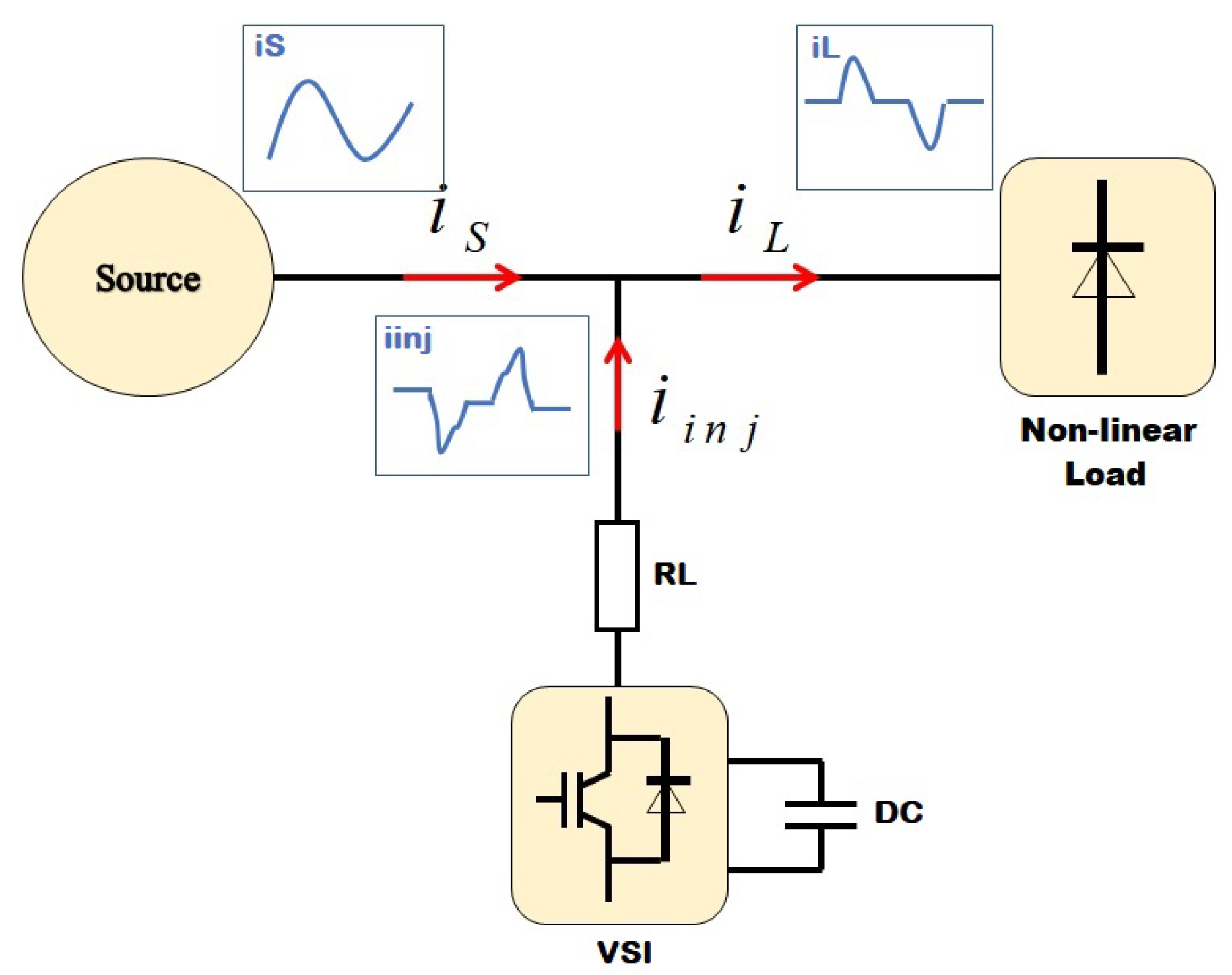
2. General Description of a Shunt Active Power Filter
3. Modeling and Control of the SAPF
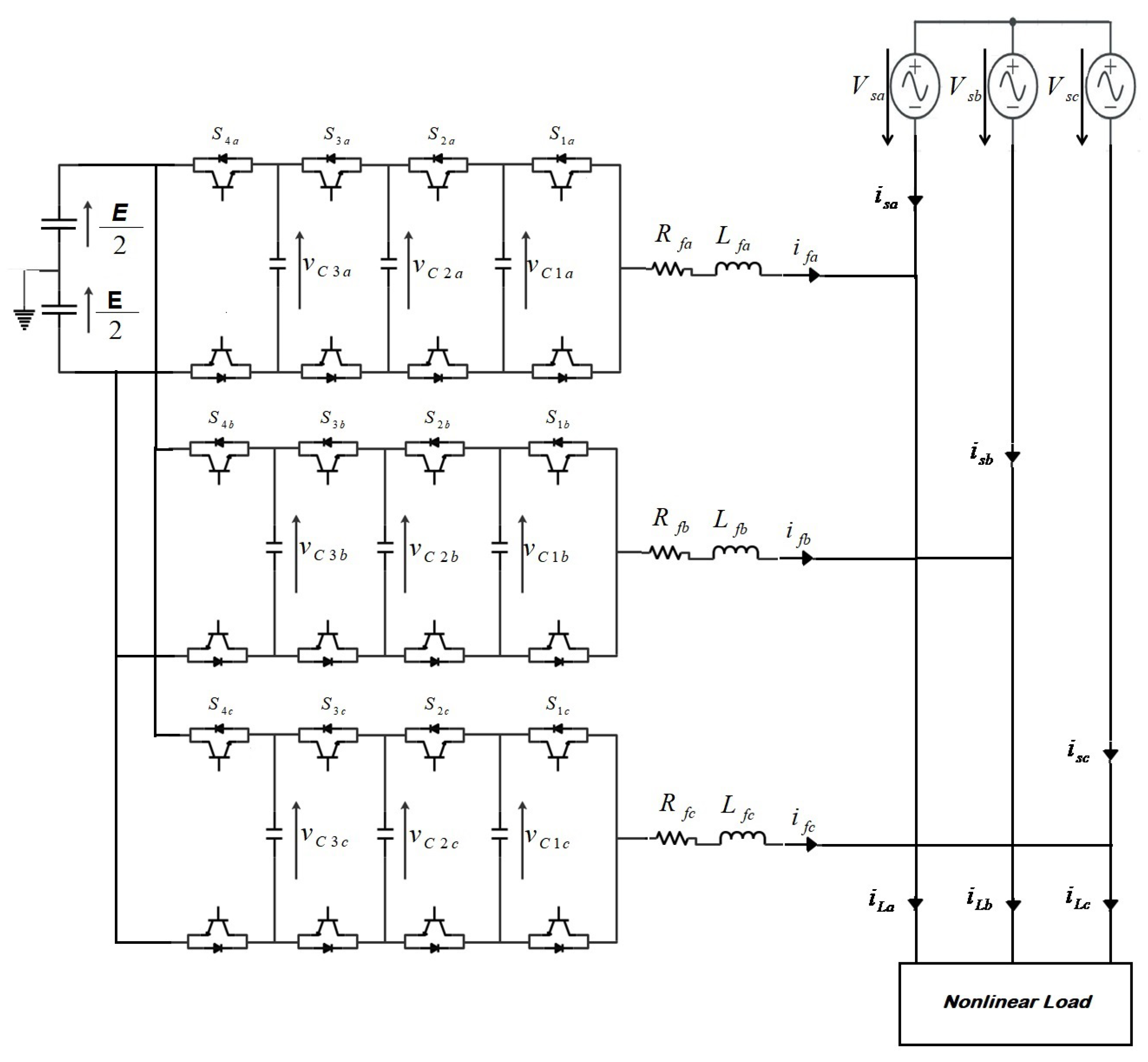
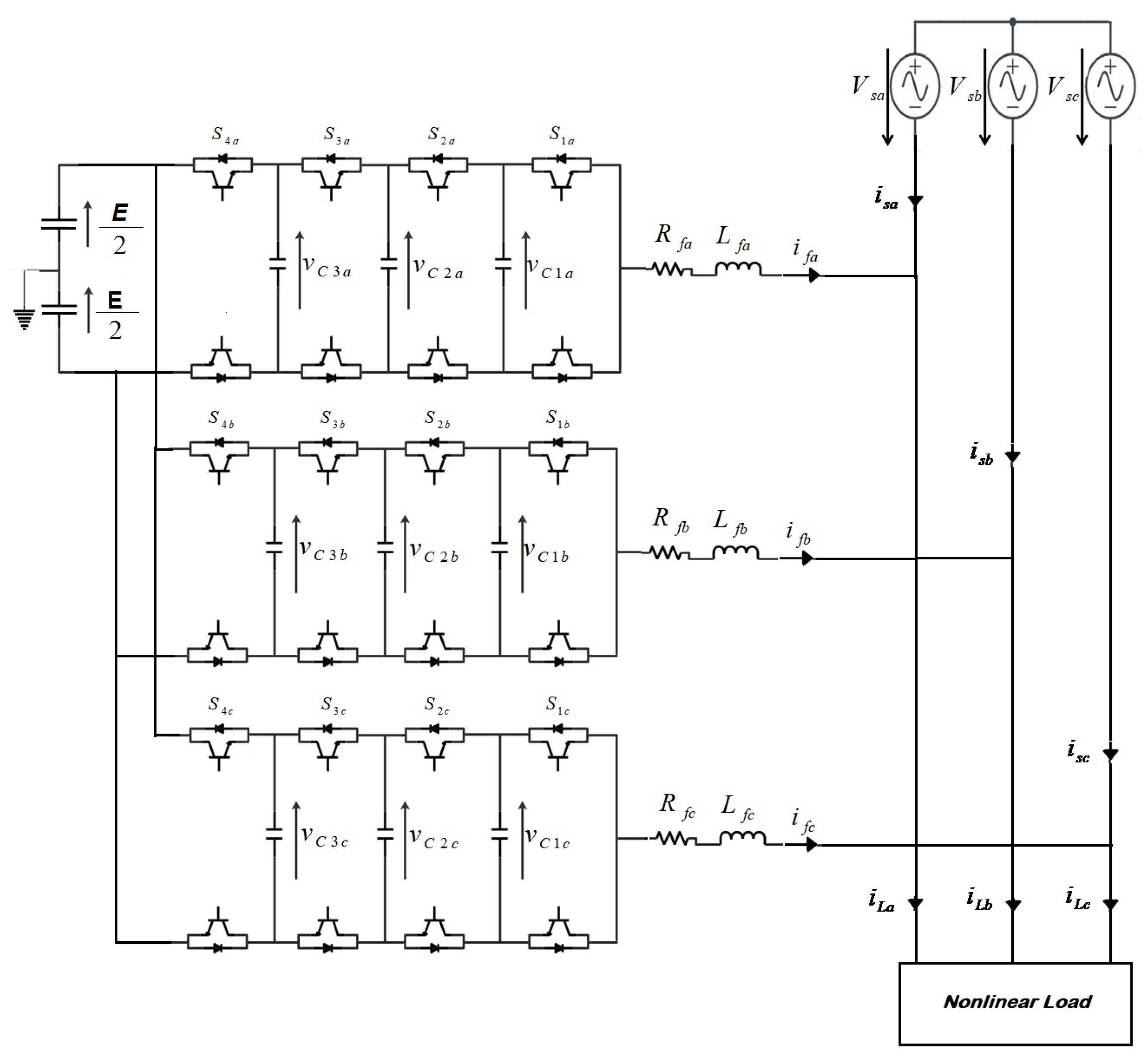
3.1. SAPF Modeling and Description
Sizing of the DC Bus Voltage
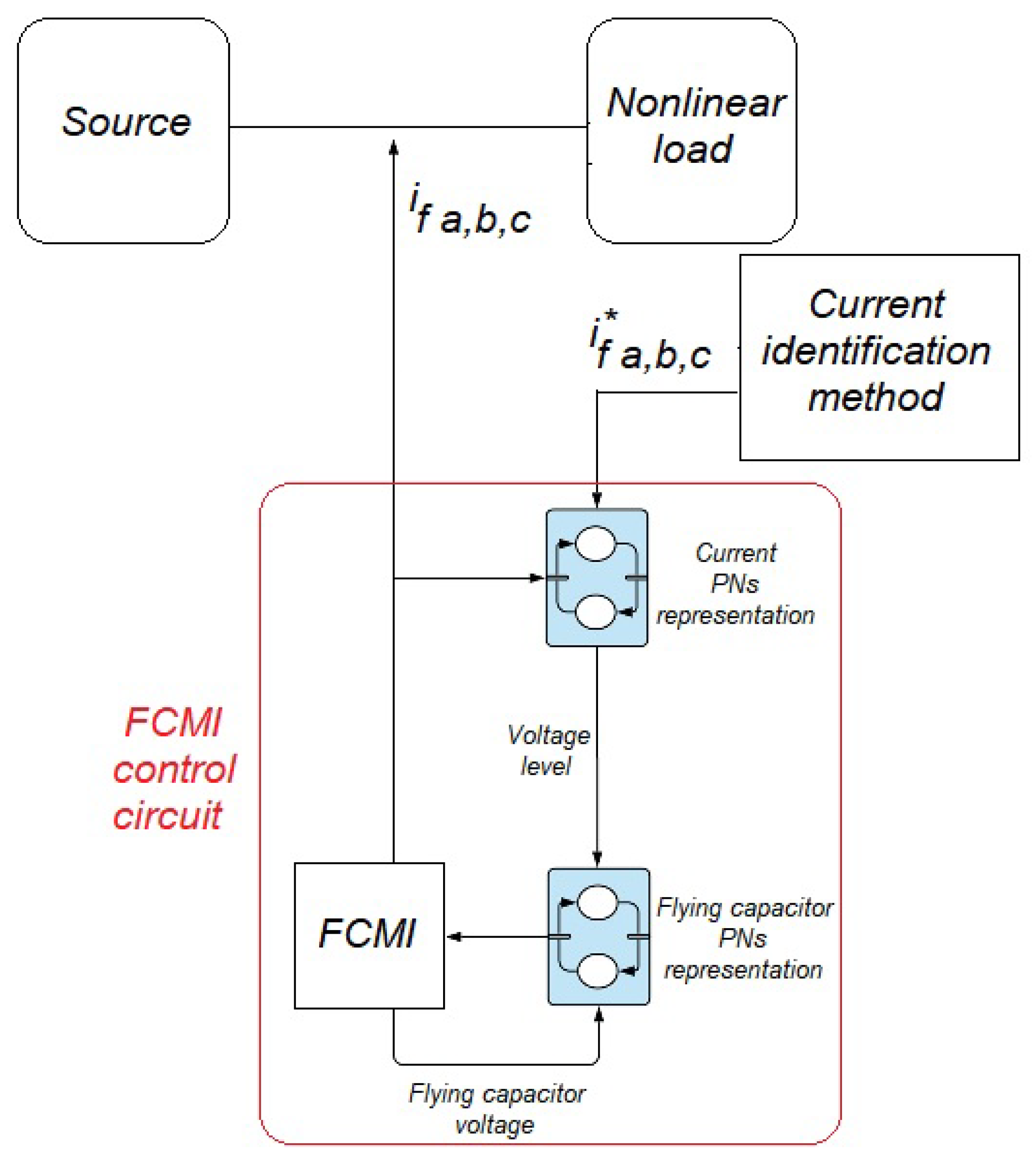
3.2. Hybrid Control Design Based on Petri Nets Modelization
- SDD selection:The selection of the SDD must ensure simultaneously the output current regulation and the capacitor voltage regulation. The following control property make it possible to establish the conditions ensuring the convergence of current error and capacitor voltages errors to zero then we can determine the appropriate SDD that should be selected.
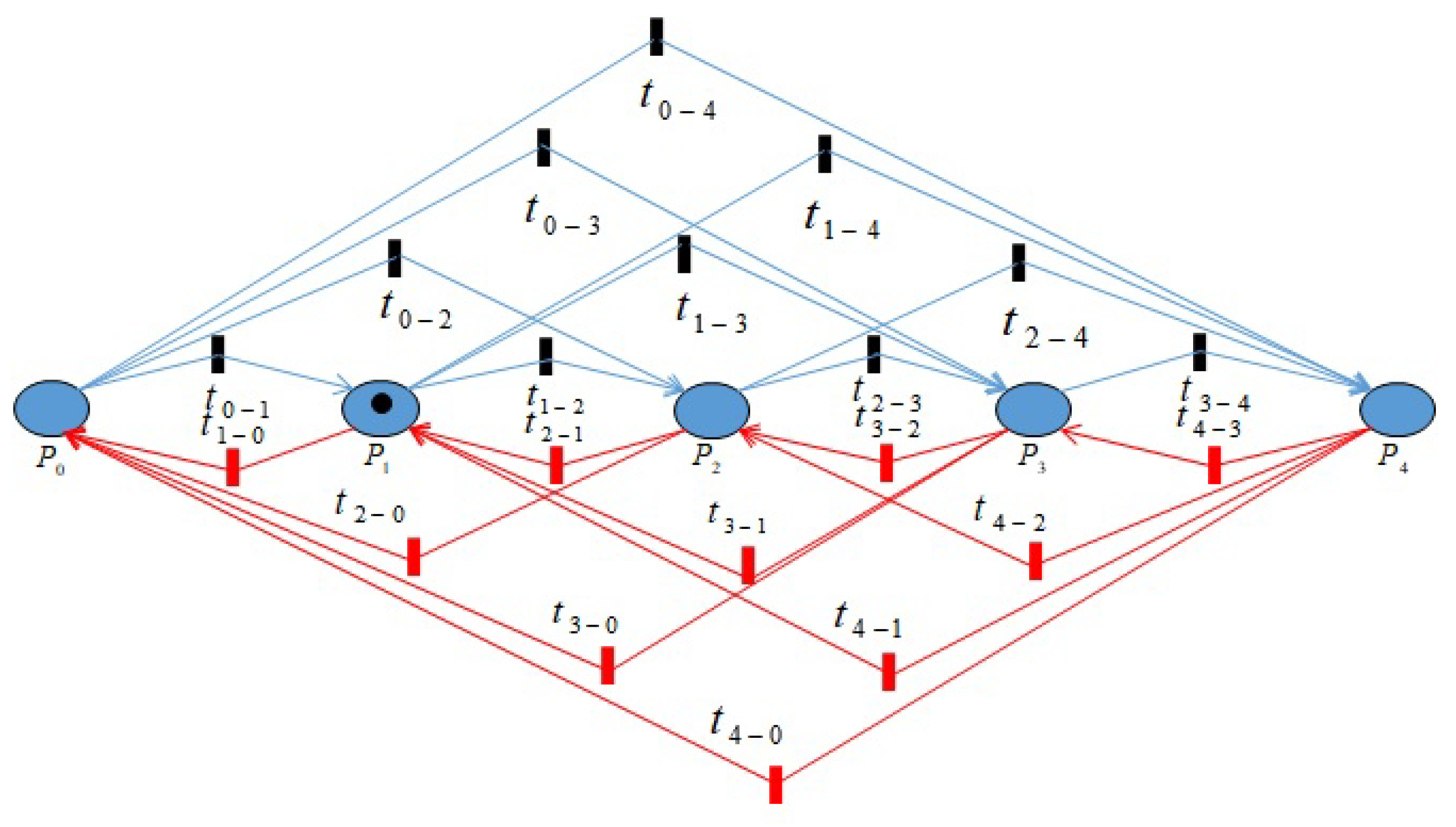
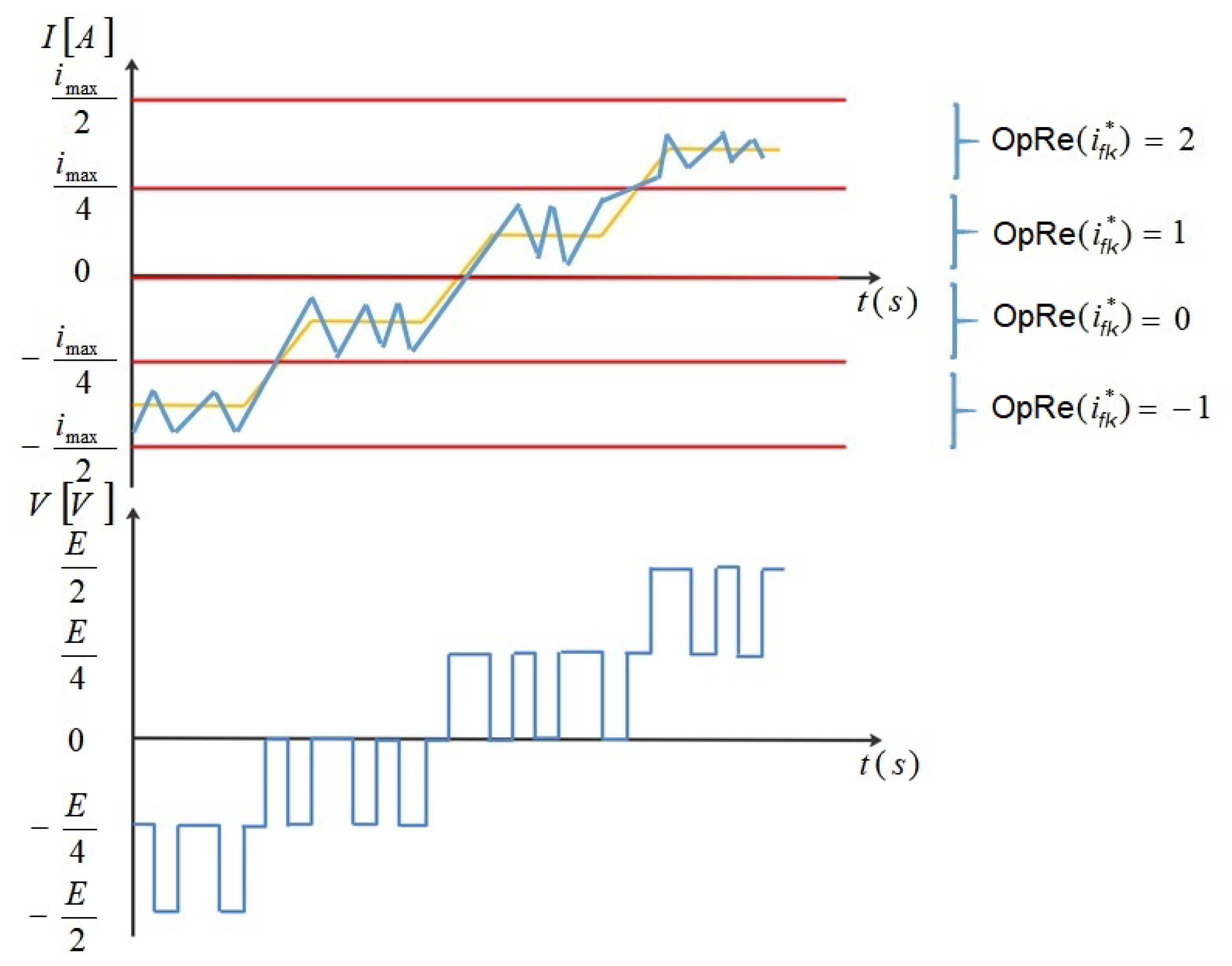
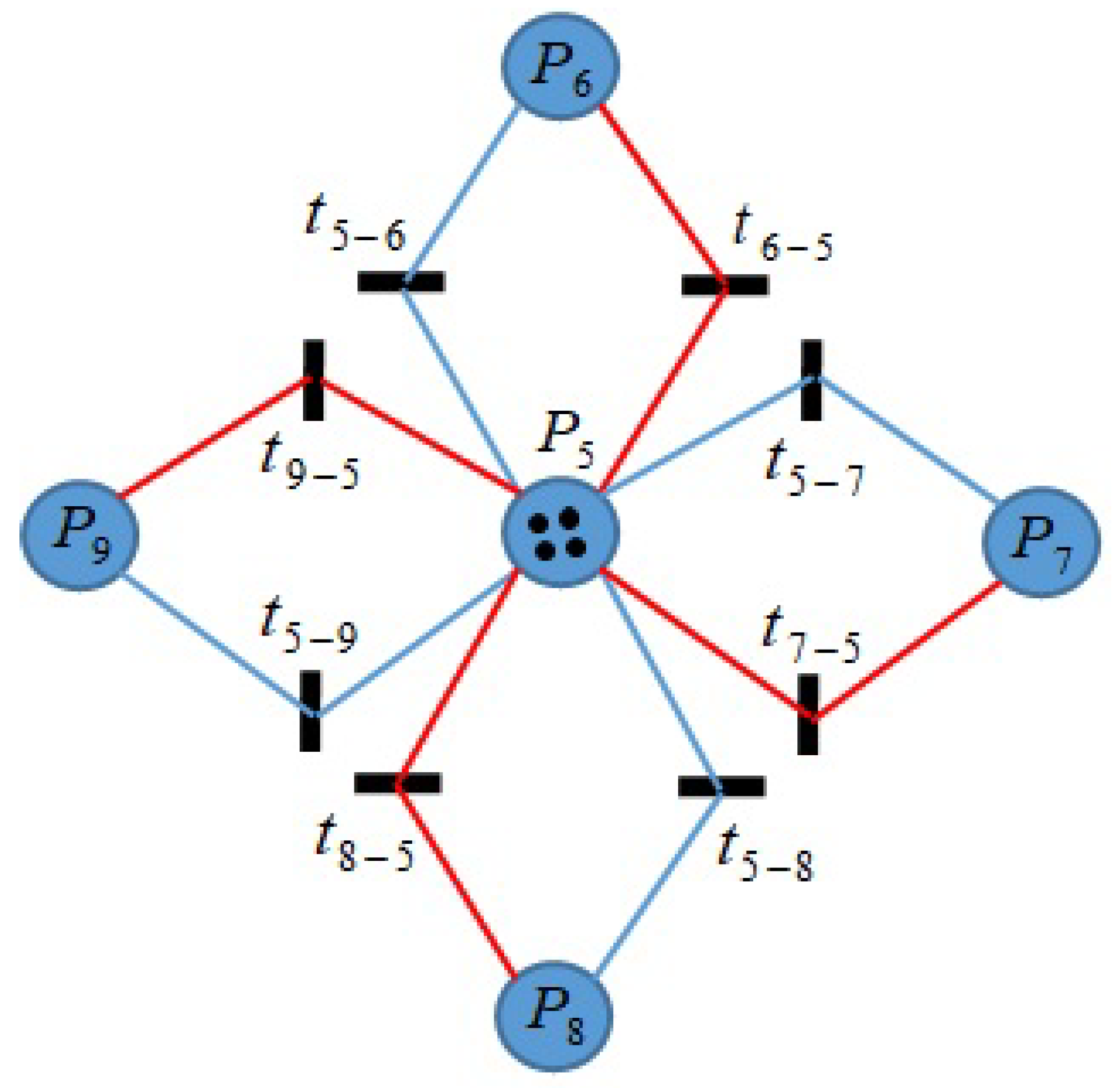
- First Petri Nets representation:The objective of this PNs representation is to select the appropriate voltage level to reach the current reference. As shown in Figure 4, the behavior of the output current follows the corresponding voltage level for a five-level FCMI, with imax = . With is the maximum supply voltage.

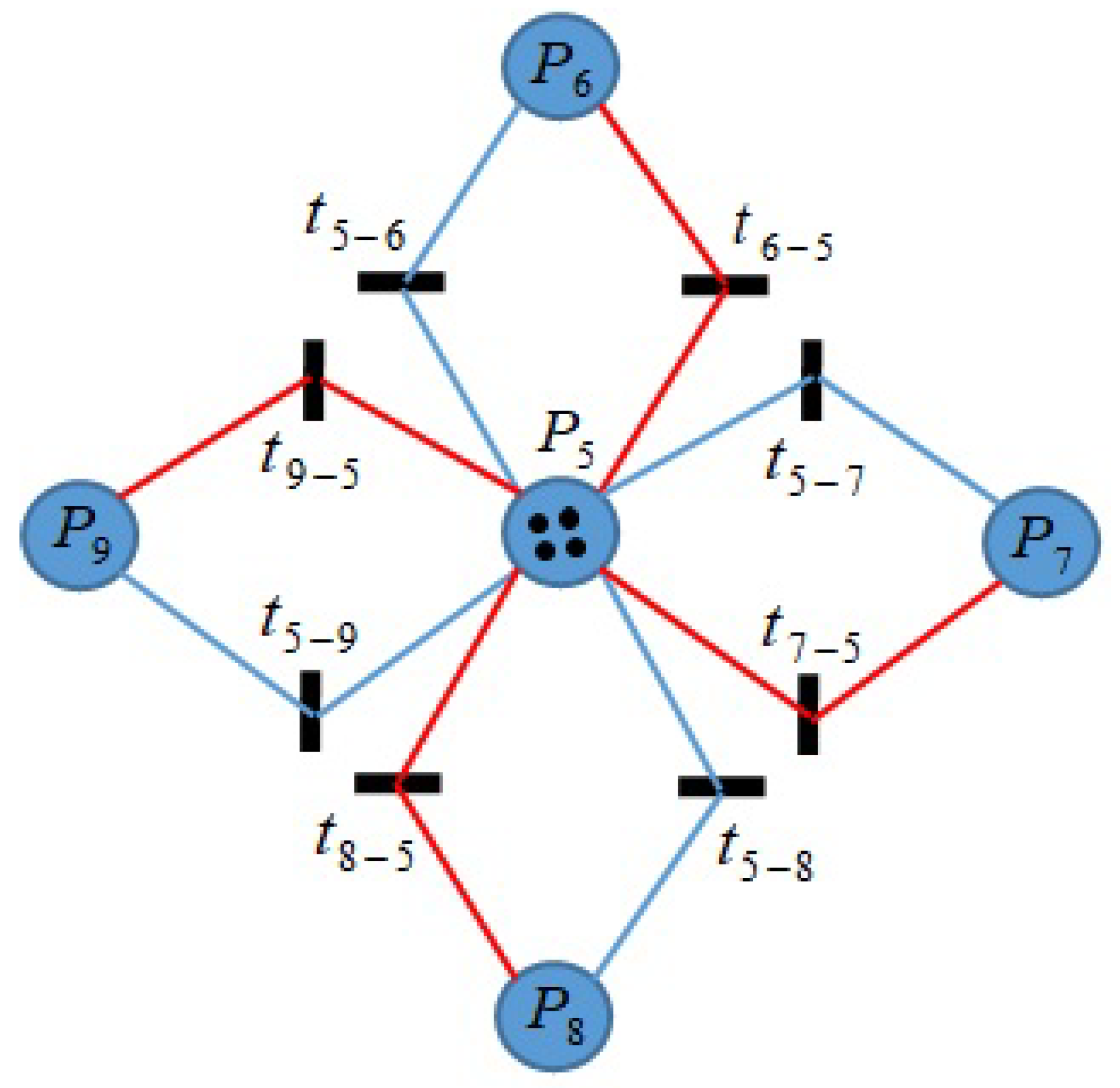
- Second Petri Nets representation:Considering the required voltage level determined by the first PNs, a second PNs representation was established to select the SDD to ensure simultaneously the pursuit of the reference current and the balance of the capacitor voltages. Table 4 shows the conditions in order to choose the equivalent SDD. The symbol (–) represents when no change is taking place and represents when the error voltage of the jth capacitor tends to zero.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SDD | → 0 | → 0 | → 0 | |
|---|---|---|---|---|
| – | – | – | ||
| – | – | – | ||
| – | – | |||
| – | – | |||
| – | ||||
| – | ||||
| – | – | |||
| – | – | |||
| – | ||||
| – | ||||
| – | ||||
| – | ||||
| – | – | |||
| – | – | |||
| – | – | |||
| – | – | |||
| – | ||||
| – | ||||
| – | ||||
| – | ||||
| – | – | |||
| – | – | |||
| – | ||||
| – | ||||
| – | – | |||
| – | – | |||
| – | – | – | ||
| – | – | – |
- –
- Step 1: Choose the subset that contains all SDDs of the desired voltage level L.
- –
- Step 2: Select an SDD that reduces the error in the capacitor voltages as described in Table 4.
- –
- Step 3: In the case where exists more than one SDD, the one that reduces the greater number of voltage errors will be selected.
- –
- Step 4: The SDD which allows the reduction of errors by increasing the voltages of the capacitors will be chosen among the rest of the existing choices.
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, W.; Chau, K.T.; Lee, C.H.; Jiang, C.; Han, W. A switched-capacitorless energy-encrypted transmitter for roadway-charging electric vehicles. IEEE Trans. Magn. 2018, 54, 1–6. [Google Scholar]
- Torki, W.; Barbot, J.P.; Ghanes, M.; Sbita, L. Sparse Recovery Diagnosis Method Applied to Hybrid Dynamical System: The Case of Three-Phase DC-AC Inverter for Wind Turbine. Open Access Libr. J. 2020, 7, 1–15. [Google Scholar] [CrossRef]
- Othman, S.; Allali, M.A.E.; Mrad, I.; Chariag, D.E.; Ghanes, M.; Sbita, L.; Barbot, J.P. Robust hybrid control based on Petri Nets for a multicellular inverter. In Proceedings of the 2020 6th IEEE International Energy Conference (ENERGYCon), Gammarth, Tunisia, 28 September–1 October 2020; pp. 143–148. [Google Scholar]
- Krommydas, K.F.; Alexandridis, A.T. Nonlinear Analysis Methods Applied on Grid-Connected Photovoltaic (PV) Systems Driven by Power Electronic Converters. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 3293–3306. [Google Scholar] [CrossRef]
- Koley, E.; Shukla, S.K.; Ghosh, S.; Mohanta, D.K. Protection scheme for power transmission lines based on SVM and ANN considering the presence of non-linear loads. IET Gener. Transm. Distrib. 2017, 11, 2333–2341. [Google Scholar] [CrossRef]
- Khawla, E.M.; Chariag, D.E.; Sbita, L. A control strategy for a three-phase grid connected PV system under grid faults. Electronics 2019, 8, 906. [Google Scholar] [CrossRef] [Green Version]
- Issa, W.; Sharkh, S.; Mallick, T.; Abusara, M. Improved reactive power sharing for parallel-operated inverters in islanded microgrids. J. Power Electron. 2016, 16, 1152–1162. [Google Scholar] [CrossRef] [Green Version]
- Bhattacharya, S.; Divan, D.M.; Banerjee, B.B. Control and reduction of terminal voltage total harmonic distortion (THD) in a hybrid series active and parallel passive filter system. In Proceedings of the IEEE Power Electronics Specialist Conference (PESC’93), Seattle, WA, USA, 20–24 June 1993; pp. 779–786. [Google Scholar]
- Karafotis, P.A.; Evangelopoulos, V.A.; Georgilakis, P.S. Evaluation of harmonic contribution to unbalance in power systems under non-stationary conditions using wavelet packet transform. Electr. Power Syst. Res. 2020, 178, 106026. [Google Scholar] [CrossRef]
- Dehghani, M.; Mardaneh, M.; Guerrero, J.M.; Malik, O.P.; Ramirez-Mendoza, R.A.; Matas, J.; Vasquez, J.C.; Parra-Arroyo, L. A new “Doctor and Patient” optimization algorithm: An application to energy commitment problem. Appl. Sci. 2020, 10, 5791. [Google Scholar] [CrossRef]
- Alali, M.A.E. Contribution à l’Etude des Compensateurs Actifs des Réseaux Electriques Basse Tension (Automatisation des systèMes de Puissance éLectriques). Ph.D. Thesis, University of Strasbourg, Strasbourg, France, 2002. [Google Scholar]
- Wang, X.; Blaabjerg, F. Harmonic stability in power electronic-based power systems: Concept, modeling, and analysis. IEEE Trans. Smart Grid 2018, 10, 2858–2870. [Google Scholar] [CrossRef] [Green Version]
- Alali, M.A.; Shtessel, Y.B.; Barbot, J.P. Grid-Connected Shunt Active LCL Control via Continuous SMC and HOSMC Techniques. In Variable-Structure Systems and Sliding-Mode Control; Springer: Cham, Switzerland, 2020; pp. 275–308. [Google Scholar]
- Mrad, I. Observabilité et Inversion à Gauche des systèmes Dynamiques Hybrides. Ph.D. Thesis, École Nationale D’ingéNieurs de Gabès, Cergy-Pontoise, France, 2019. [Google Scholar]
- Barbot, J.P.; Saadaoui, H.; Djemai, M.; Manamanni, N. Nonlinear observer for autonomous switching systems with jumps. Nonlinear Anal. Hybrid Syst. 2007, 1, 537–547. [Google Scholar] [CrossRef]
- Meynard, T.; Foch, H. Electronic Device for Electrical Energy Conversion between a Voltage Source and a Current Source by Means of Controllable Switching Cells. U.S. Patent 5,737,201, 7 April 1998. [Google Scholar]
- Depenbrock, M. Direct self-control (DSC) of inverter fed induktion machine. In Proceedings of the 1987 IEEE Power Electronics Specialists Conference, Blacksburg, VA, USA, 21–26 June 1987; pp. 632–641. [Google Scholar]
- Zouari, M.; Baklouti, N.; Sanchez-Medina, J.; Kammoun, H.M.; Ayed, M.B.; Alimi, A.M. PSO-Based Adaptive Hierarchical Interval Type-2 Fuzzy Knowledge Representation System (PSO-AHIT2FKRS) for Travel Route Guidance. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Jin, Z.; Meng, L.; Guerrero, J.M.; Han, R. Hierarchical control design for a shipboard power system with DC distribution and energy storage aboard future more-electric ships. IEEE Trans. Ind. Inform. 2017, 14, 703–714. [Google Scholar] [CrossRef] [Green Version]
- Gateau, G. Contribution à la Commande des Convertisseurs Statiques Multicellulaires Série: Commande non linéaire et Commande Floue. Ph.D. Thesis, Institut National Polytechnique de Toulouse, Toulouse, France, 1997. [Google Scholar]
- Delmas, L.; Gateau, G.; Meynard, T.A.; Foch, H. Stacked multicell converter (SMC): Control and natural balancing. In Proceedings of the 2002 IEEE 33rd Annual IEEE Power Electronics Specialists Conference, Cairns, Australia, 23–27 June 2002; Volume 2, pp. 689–694. [Google Scholar]
- Tachon, O. Commande Découplante Linéaire des Convertisseurs Multicellulaires Série: Modélisation, Synthèse et Expérimentation. Ph.D. Thesis, Institut National Polytechnique de Toulouse, Toulouse, France, 1998. [Google Scholar]
- Xiong, R.; Cao, J.; Yu, Q.; He, H.; Sun, F. Critical review on the battery state of charge estimation methods for electric vehicles. IEEE Access 2017, 6, 1832–1843. [Google Scholar] [CrossRef]
- Alali, M.; Saadate, S.; Chapuis, Y.; Braun, F. Energetic study of a series active conditioner compensating voltage dips, unbalanced voltage and voltage harmonics. In Proceedings of the 7th IEEE International Power Electronics Congress, Technical Proceedings, CIEP 2000 (Cat. No.00TH8529), Acapulco, Mexico, 15–19 October 2000. [Google Scholar]
- Djondiné, P.; Barbot, J.P.; Ghanes, M. Comparison of Sliding Mode and Petri Nets Control for Multicellular Chopper. Int. J. Nonlinear Sci. 2018, 25, 67–75. [Google Scholar]
- Amghar, B.; Darcherif, A.; Barbot, J.P. Z(TN)-Observability and control of parallel multicell chopper using Petri nets. IET Power Electron. 2013, 6, 710–720. [Google Scholar] [CrossRef]
- Barbot, J.P.; Levant, A.; Livne, M.; Lunz, D. Discrete differentiators based on sliding modes. Automatica 2020, 112, 108633. [Google Scholar] [CrossRef]
- Salinas, F.; Ghanes, M.; Barbot, J.P.; Escalante, M.F.; Amghar, B. Modeling and control design based on petri nets for serial multicellular choppers. IEEE Trans. Control. Syst. Technol. 2014, 23, 91–100. [Google Scholar] [CrossRef]
- Vázquez, M.A.G.; Salinas, F.S.; Gutiérrez, M.F.E. Capacitor and Input Voltage Estimation Scheme for Flying Capacitor Multilevel Converters Modelled as a Petri Net. ISA Transactions; Elsevier: Amsterdam, The Netherlands, 2021. [Google Scholar]
- Petri, C.A. Kommunikation Mit Automaten; Mathematisches Institut der Universität Bonn: Bonn, Germany, 1962. [Google Scholar]
- Reveliotis, S.A. Real-Time Management of Resource Allocation Systems: A Discrete Event Systems Approach; Springer Science & Business Media: Berlin, Germany, 2006; Volume 79. [Google Scholar]
- Silva, M. On the history of discrete event systems. Annu. Rev. Control 2018, 45, 213–222. [Google Scholar] [CrossRef]
- Farhat, M.; Barambones, O.; Sbita, L. A new maximum power point method based on a sliding mode approach for solar energy harvesting. Appl. Energy 2017, 185, 1185–1198. [Google Scholar] [CrossRef]
- Alali, M.A.; Barbot, J.P. A Lyapunov approach based higher order sliding mode controller for grid connected shunt active compensators with a LCL filter. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017. [Google Scholar]
- Akagi, H.; Kanazawa, Y.; Nabae, A. Instantaneous reactive power compensators comprising switching devices without energy storage components. IEEE Trans. Ind. Appl. 1984, IA-20, 625–630. [Google Scholar] [CrossRef]
- Sadigh, A.K.; Dargahi, V.; Corzine, K.A. New active capacitor voltage balancing method for flying capacitor multicell converter based on logic-form-equations. IEEE Trans. Ind. Electron. 2016, 64, 3467–3478. [Google Scholar] [CrossRef]





| SDD | |
|---|---|
| Place | Designation |
|---|---|
| Level , corresponding to the minimum voltage | |
| Level , corresponding to the voltage | |
| Level , corresponding to the voltage | |
| Level , corresponding to the voltage | |
| Level , corresponding to the maximum voltage |
| Transition | Transition Rule | Reached Level |
|---|---|---|
| −1 | ||
| −2 | ||
| 0 | ||
| −2 | ||
| 1 | ||
| −2 | ||
| 2 | ||
| −2 | ||
| 0 | ||
| −1 | ||
| 1 | ||
| −1 | ||
| 2 | ||
| −1 | ||
| 1 | ||
| 0 | ||
| 2 | ||
| 0 | ||
| 2 | ||
| 1 |
| Place | Designation |
|---|---|
| Initial state | |
| Closing of the first switch | |
| Closing of the second switch | |
| Closing of the third switch | |
| Closing of the fourth switch |
| Transition | Transition Rule |
|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Othman, S.; Alali, M.A.; Sbita, L.; Barbot, J.-P.; Ghanes, M. Modeling and Control Design Based on Petri Nets Tool for a Serial Three-Phase Five-Level Multicellular Inverter Used as a Shunt Active Power Filter. Energies 2021, 14, 5335. https://doi.org/10.3390/en14175335
Othman S, Alali MA, Sbita L, Barbot J-P, Ghanes M. Modeling and Control Design Based on Petri Nets Tool for a Serial Three-Phase Five-Level Multicellular Inverter Used as a Shunt Active Power Filter. Energies. 2021; 14(17):5335. https://doi.org/10.3390/en14175335
Chicago/Turabian StyleOthman, Sana, Mohamad Alaaeddin Alali, Lassaad Sbita, Jean-Pierre Barbot, and Malek Ghanes. 2021. "Modeling and Control Design Based on Petri Nets Tool for a Serial Three-Phase Five-Level Multicellular Inverter Used as a Shunt Active Power Filter" Energies 14, no. 17: 5335. https://doi.org/10.3390/en14175335
APA StyleOthman, S., Alali, M. A., Sbita, L., Barbot, J.-P., & Ghanes, M. (2021). Modeling and Control Design Based on Petri Nets Tool for a Serial Three-Phase Five-Level Multicellular Inverter Used as a Shunt Active Power Filter. Energies, 14(17), 5335. https://doi.org/10.3390/en14175335