
Control Strategy of 1 kV Hybrid Active Power Filter for Mining Applications

 ,
,  , ,
, , 
Abstract
:1. Introduction
- partial or total loss of one or more processes (e.g., loss of control due to a voltage dip);
- poor long-term performance or poor product quality (e.g., employee fatigue due to flicker);
- cost increase due to reduction of equipment life leading to premature failure (e.g., overheating of transformers due to harmonics);
- increased power losses resulting from distorted voltages and currents.
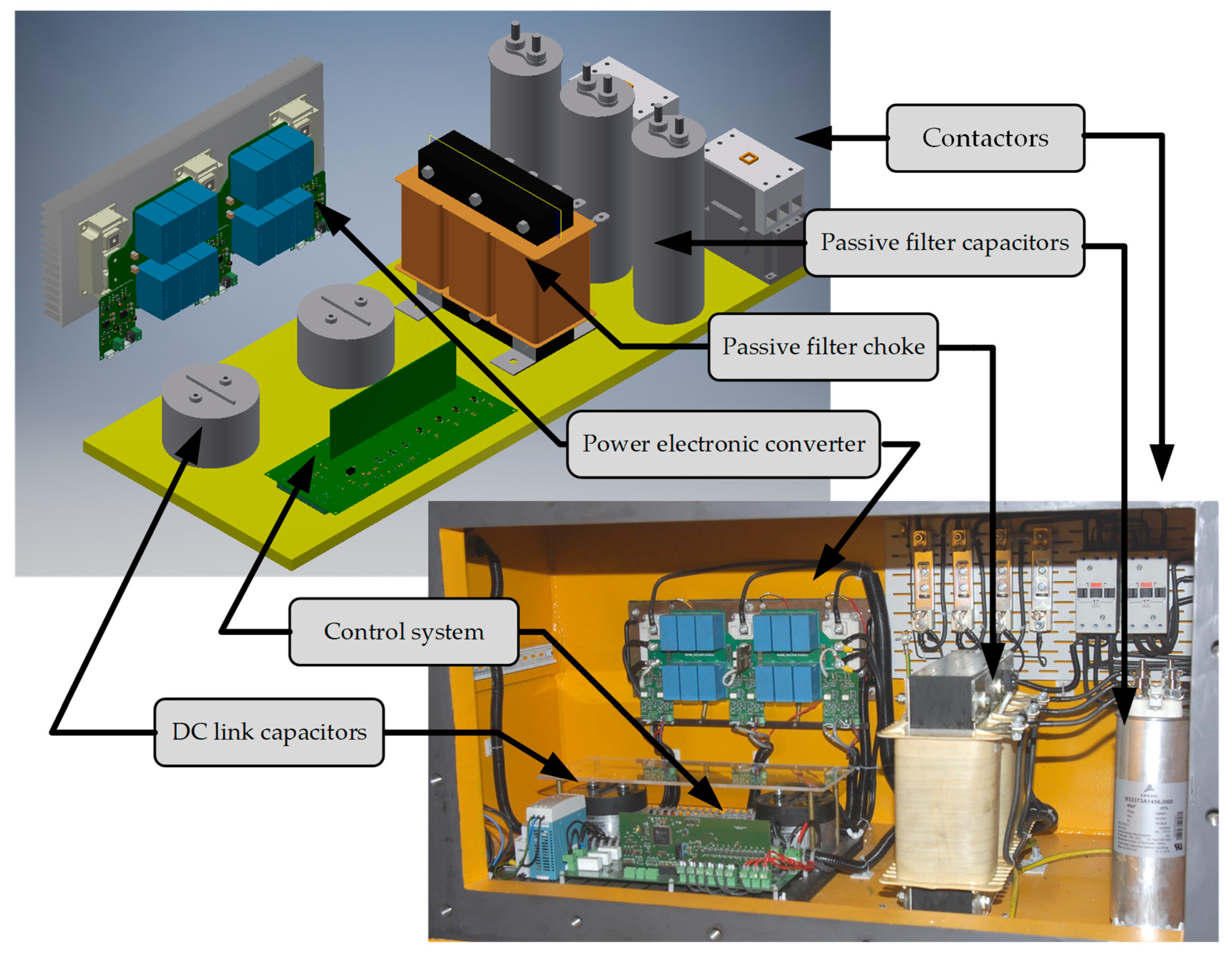
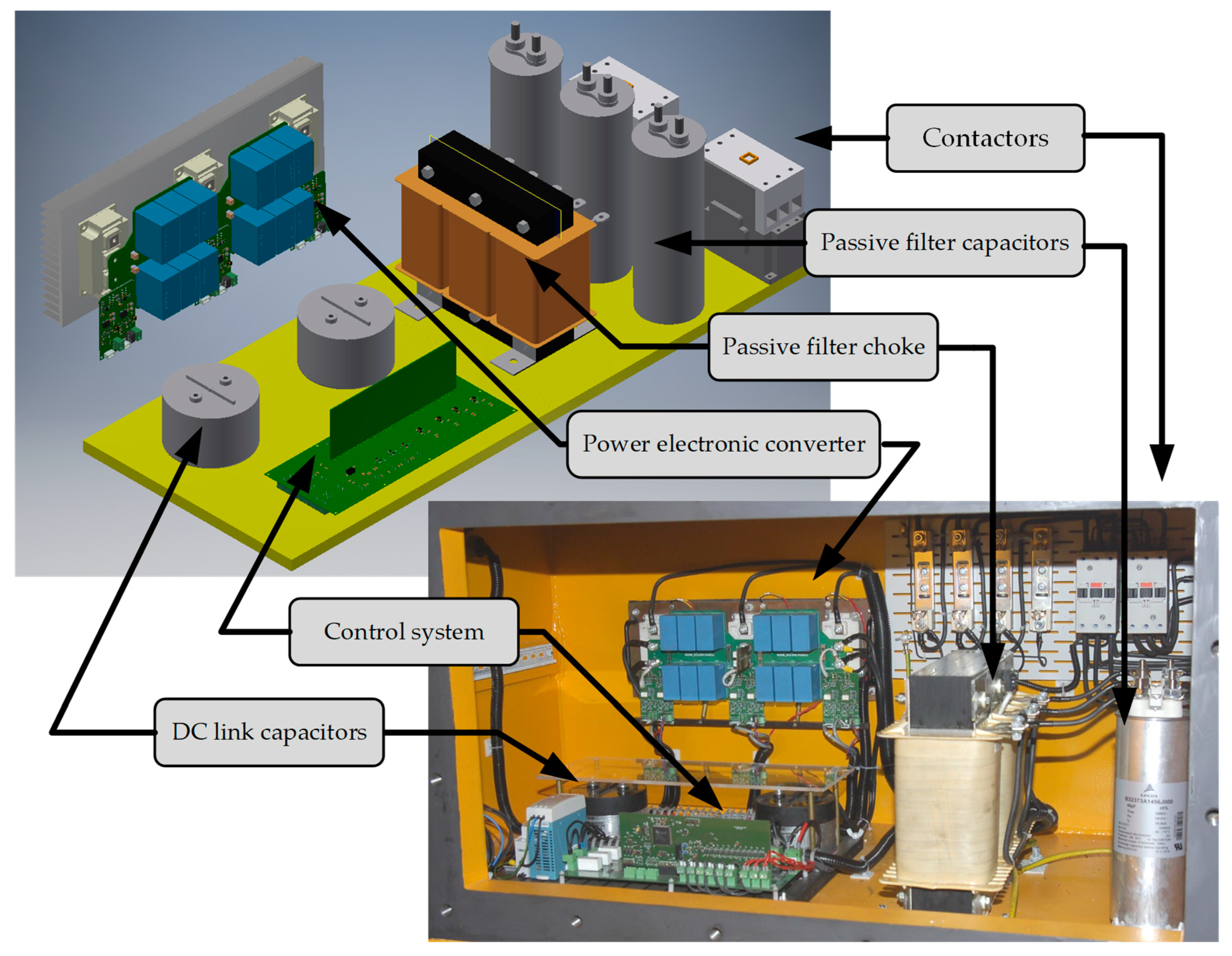
2. Analyzed Hybrid Active Power Filter
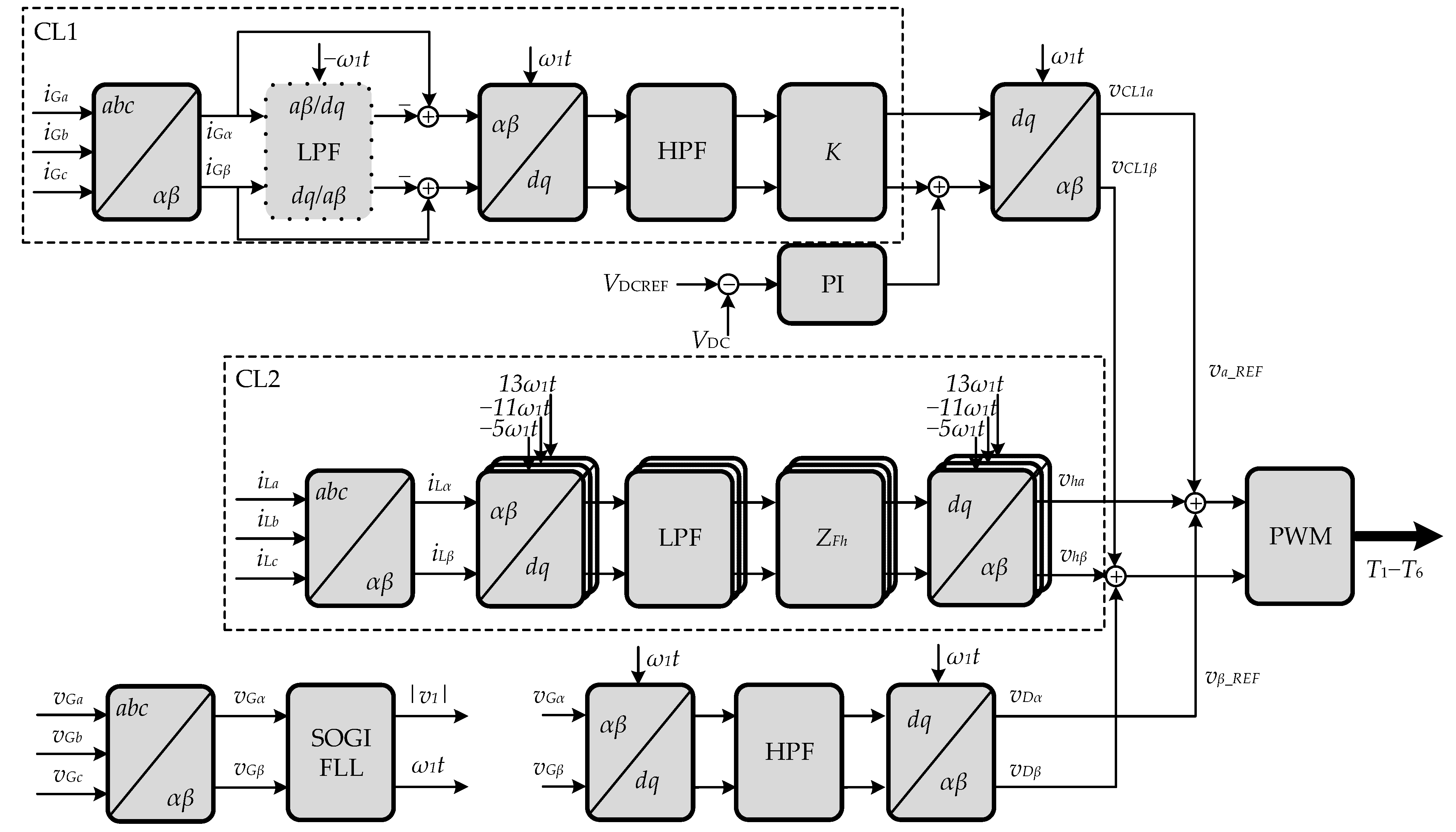
3. Control Algorithm of the Hybrid Active Power Filters (HAPF)
4. Analysis of Time Delay Influence on Operation of Control System
5. Parameter Selection for the Control Algorithm
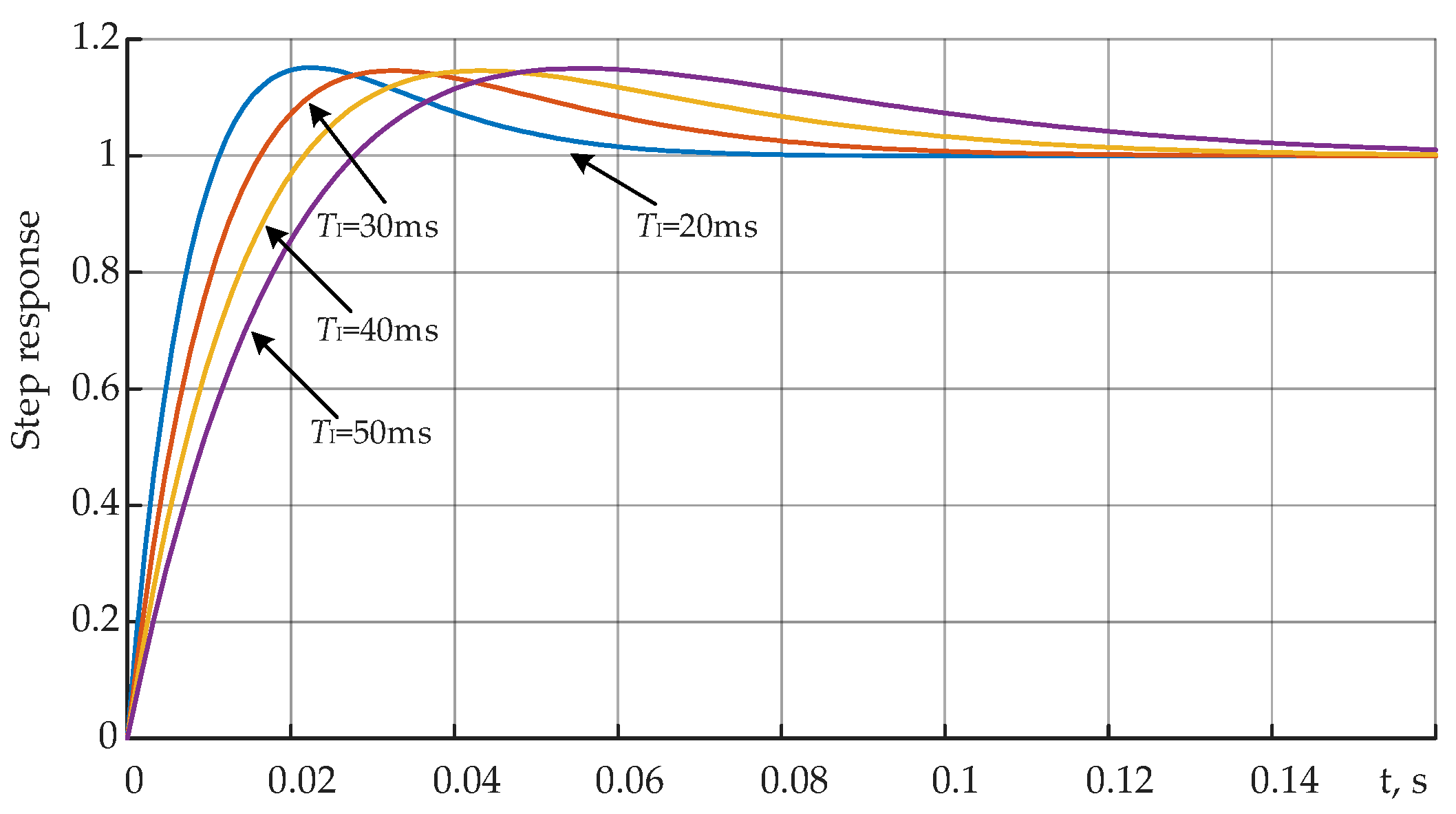
5.1. Parameter Selection for dc Link Voltage Controller
5.2. Parameter Selection for Signal Filters in Current Control Loops
5.3. Selection of the Gain K for the Hybrid Active Power Filter
6. Experimental Results
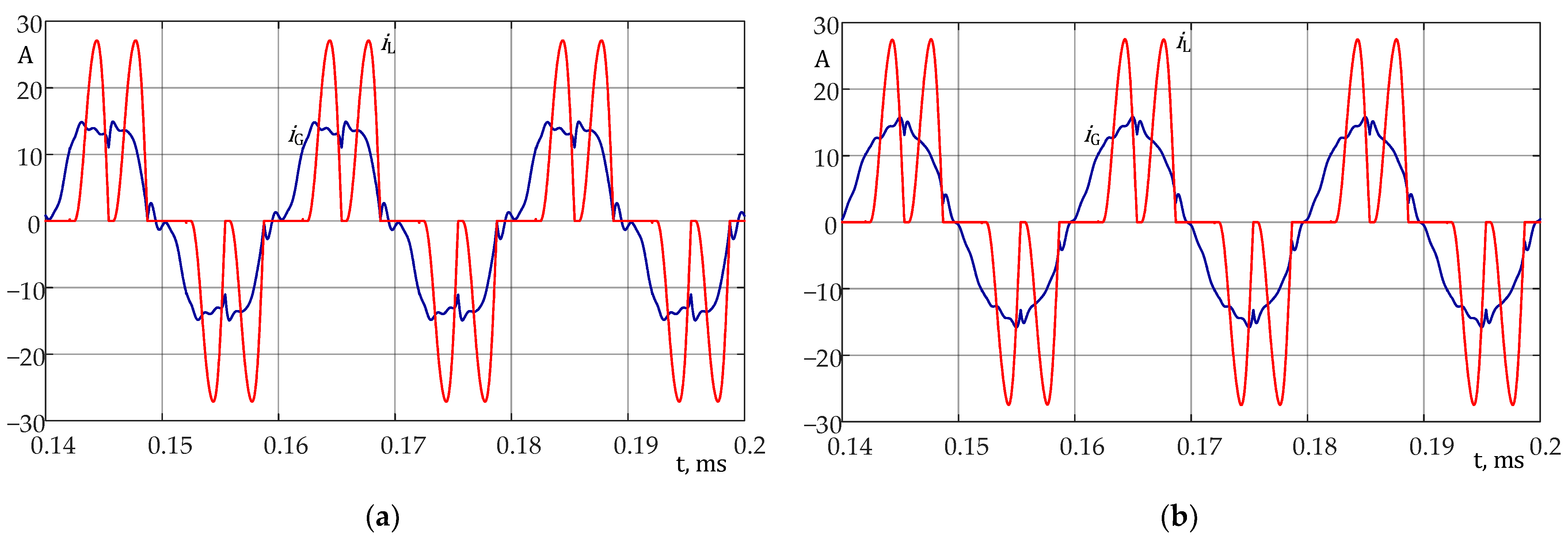
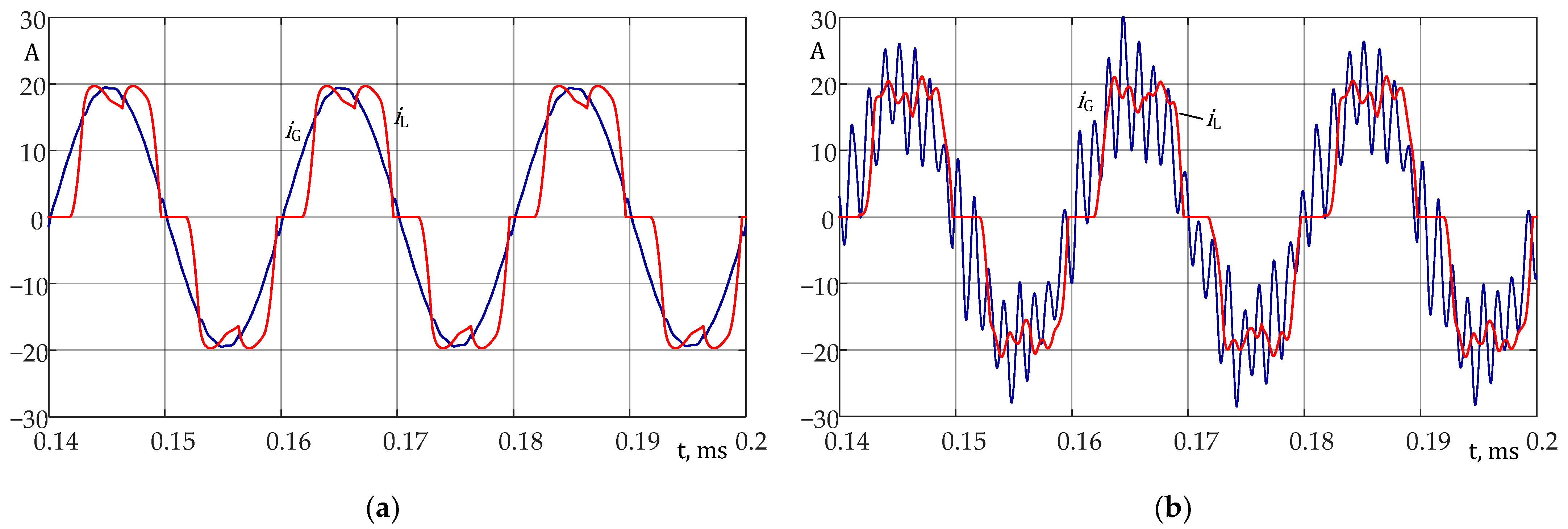
6.1. Verification of Appropriateness of the Control Algorithm Modifications
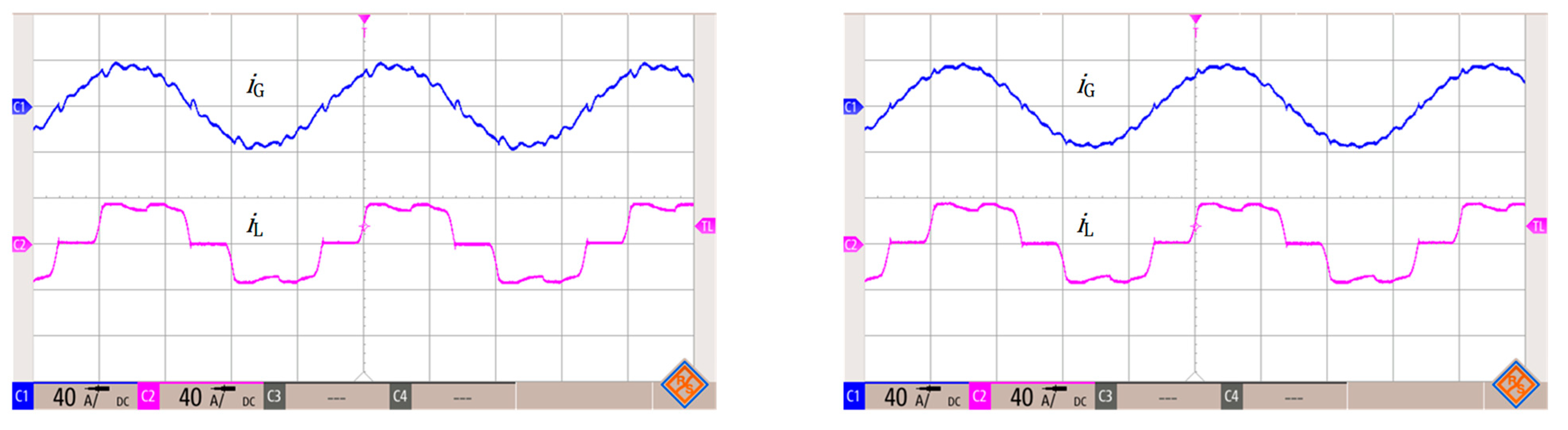
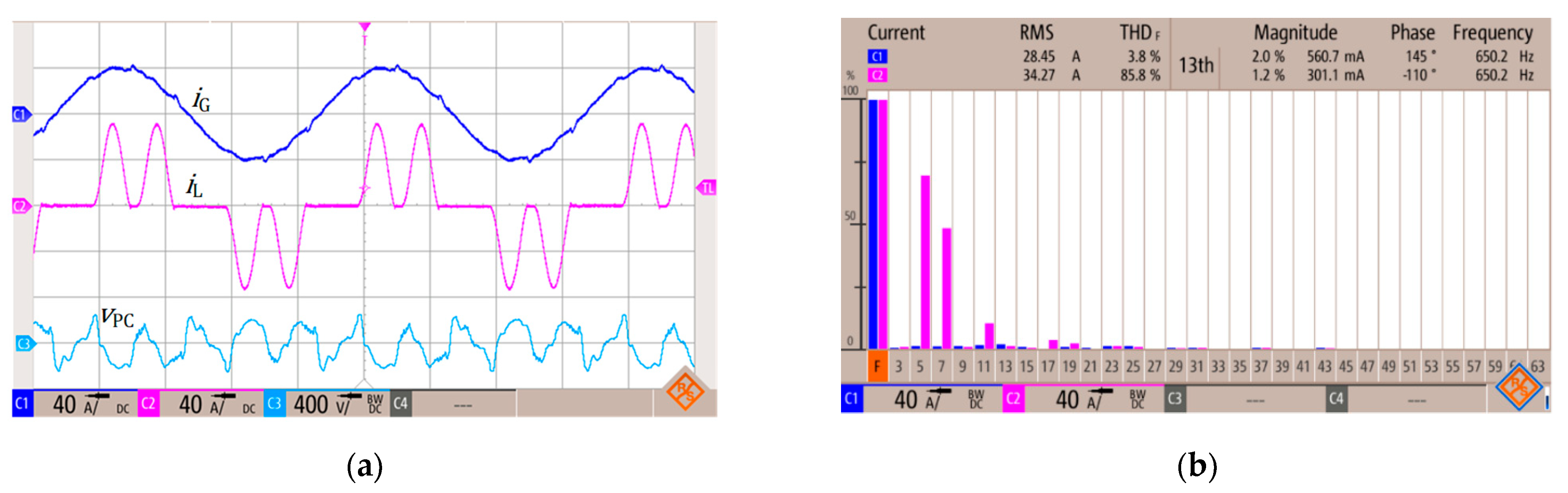
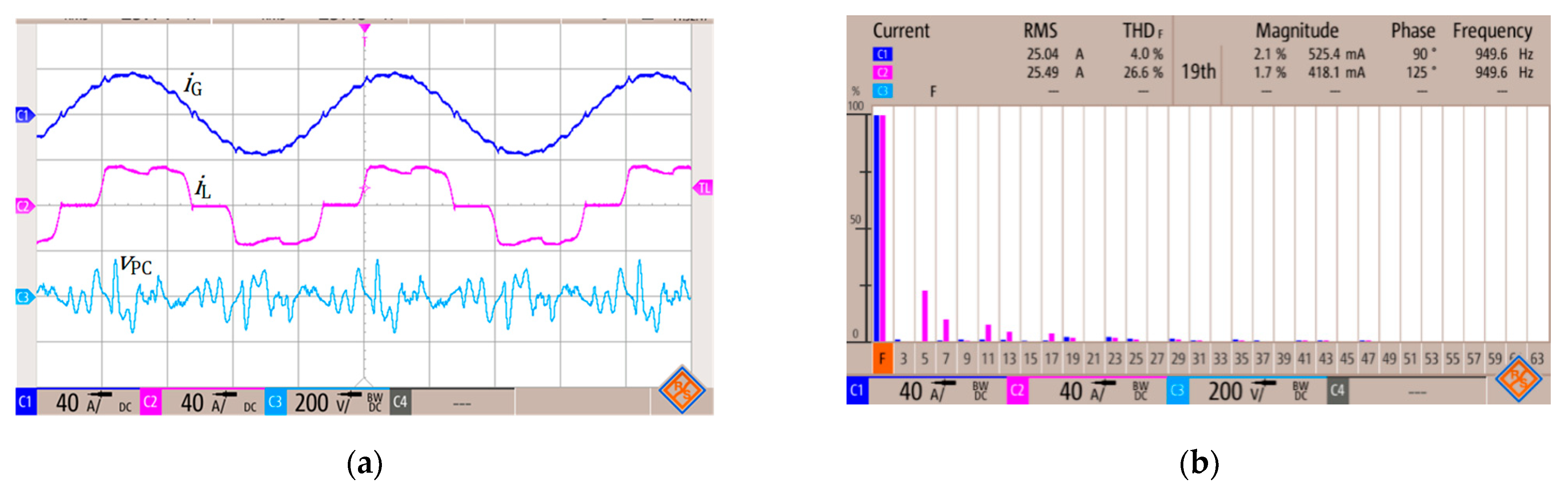
6.2. Harmonics Reduction Performance for Different Loads
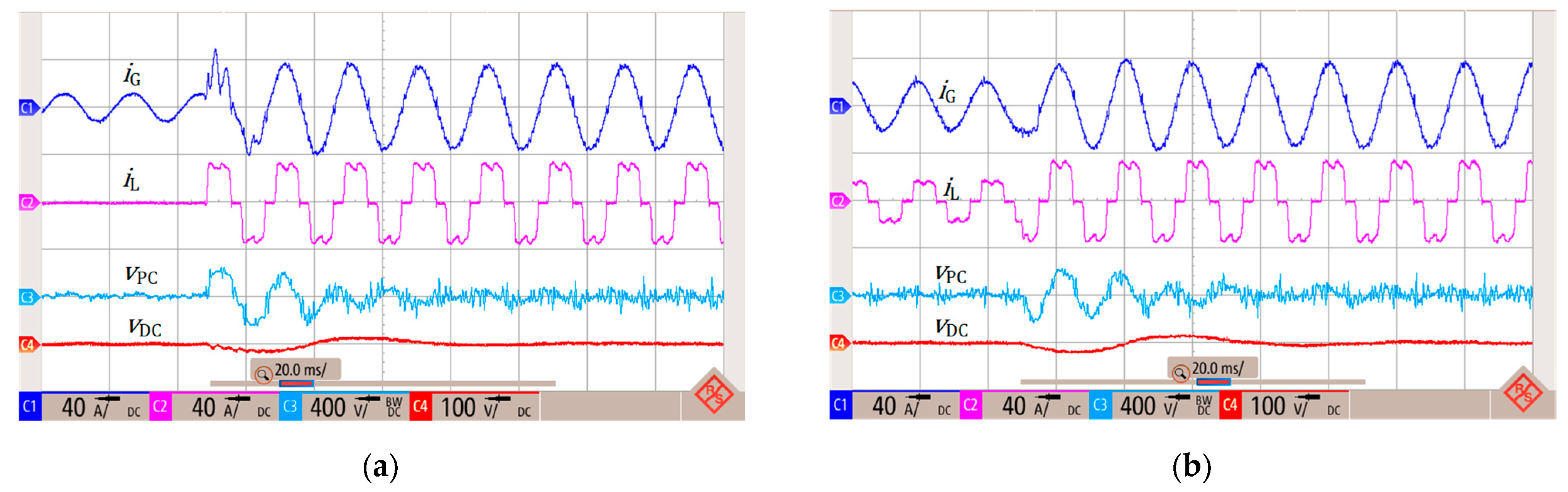
6.3. Transient Tests
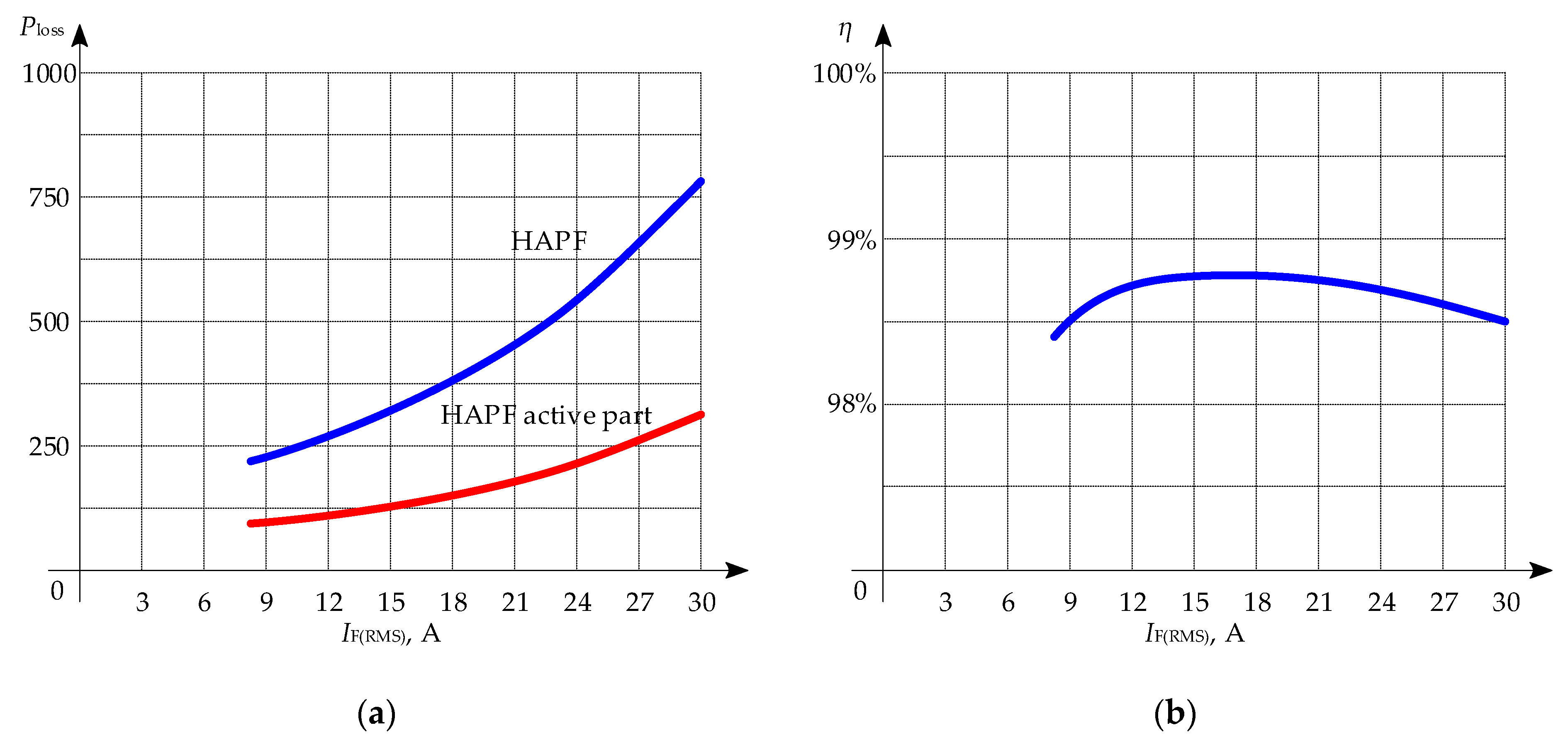
6.4. Power Losses
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Research and Markets Ltd. Variable Frequency Drive Market Size, Share & Trends Analysis Report by Product (AC, DC, Servo), by Power Range (Micro, Low, Medium, High), by Application, by End Use, by Region, and Segment Forecasts, 2020–2027. Available online: https://www.researchandmarkets.com/reports/4613371/variable-frequency-drive-market-size-share-and (accessed on 12 July 2021).
- Beleiu, H.G.; Beleiu, I.N.; Pavel, S.G.; Darab, C.P. Management of Power Quality Issues from an Economic Point of View. Sustainability 2018, 10, 2326. [Google Scholar] [CrossRef] [Green Version]
- Targosz, R.; Manson, J. Pan-European Power Quality Survey. In Proceedings of the 2007 9th International Conference on Electrical Power Quality and Utilisation, Barcelona, Spain, 9–11 October 2007; pp. 1–6. [Google Scholar]
- IEEE 519 Working Group. 519-2014—IEEE Recommended Practice and Requirements for Harmonic Control in Electric Power Systems—Redline; Revision of IEEE STD 519–1992; IEEE: Manhattan, NY, USA, 2014; pp. 1–213. [Google Scholar]
- IEC Webstore. IEC 61000-3-2:2018. Electromagnetic Compatibility, EMC, Smart City, Rural Electrification. Available online: https://webstore.iec.ch/publication/28164 (accessed on 12 July 2021).
- IEC Webstore. IEC 61000-3-12:2011. Electromagnetic Compatibility, EMC, Smart City. Available online: https://webstore.iec.ch/publication/4144 (accessed on 12 July 2021).
- Takeda, M.; Ikeda, K.; Teramoto, A.; Aritsuka, T. Harmonic current compensation with active filter. In Proceedings of the IEEE/IAS Annual Meeting, Atlanta, GA, USA, 18–23 October 1987. [Google Scholar]
- The Electric Power Engineering Handbook—Five Volume Set. Available online: https://www.routledge.com/The-Electric-Power-Engineering-Handbook---Five-Volume-Set/Grigsby/p/book/9781439856352 (accessed on 12 July 2021).
- Peng, F.Z.; Akagi, H.; Nabae, A. A New Approach to Harmonic Compensation in Power Systems—A Combined System of Shunt Passive and Series Active Filters. IEEE Trans. Ind. Appl. 1990, 26, 983–990. [Google Scholar] [CrossRef]
- Fujita, H.; Akagi, H. A Practical Approach to Harmonic Compensation in Power Systems-Series Connection of Passive and Active Filters. IEEE Trans. Ind. Appl. 1991, 27, 1020–1025. [Google Scholar] [CrossRef] [Green Version]
- Bhattacharya, S.; Cheng, P.-T.; Divan, D.M. Hybrid Solutions for Improving Passive Filter Performance in High Power Applications. IEEE Trans. Ind. Appl. 1997, 33, 732–747. [Google Scholar] [CrossRef]
- Tareen, W.U.K.; Mekhielf, S. Three-Phase Transformerless Shunt Active Power Filter with Reduced Switch Count for Harmonic Compensation in Grid-Connected Applications. IEEE Trans. Power Electron. 2018, 33, 4868–4881. [Google Scholar] [CrossRef]
- Deng, Y.; Tong, X.; Jia, H. A Bidirectional Control Principle of Active Tuned Hybrid Power Filter Based on the Active Reactor Using Active Techniques. IEEE Trans. Ind. Inform. 2015, 11, 141–154. [Google Scholar] [CrossRef]
- Luo, A.; Shuai, Z.; Shen, Z.; Zhu, W.; Xu, X. Design Considerations for Maintaining DC-Side Voltage of Hybrid Active Power Filter with Injection Circuit. IEEE Trans. Power Electron. 2009, 24, 75–84. [Google Scholar] [CrossRef]
- Xiang, Z.; Pang, Y.; Wang, L.; Wong, C.; Lam, C.-S.; Wong, M.C. Design, Control and Comparative Analysis of a LCLC Coupling Hybrid Active Power Filter. IET Power Electron. 2020, 13, 1207–1217. [Google Scholar] [CrossRef]
- Marques, H.; Anunciada, A.V. A New Hybrid Power Filter Topology Enabling Low Voltage Switching Devices and Storage Capacitors. In Proceedings of the 2005 IEEE 36th Power Electronics Specialists Conference, Dresden, Germany, 16 July 2005; pp. 1935–1940. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Chakraborty, C.; Bhattacharya, S. Parallel-Connected Shunt Hybrid Active Power Filters Operating at Different Switching Frequencies for Improved Performance. IEEE Trans. Ind. Electron. 2012, 59, 4007–4019. [Google Scholar] [CrossRef]
- Han, Y.; Xu, L.; Khan, M.M.; Chen, C.; Yao, G.; Zhou, L.-D. Robust Deadbeat Control Scheme for a Hybrid APF With Resetting Filter and ADALINE-Based Harmonic Estimation Algorithm. IEEE Trans. Ind. Electron. 2011, 58, 3893–3904. [Google Scholar] [CrossRef]
- Iqbal, M.; Jawad, M.; Jaffery, M.; Akhtar, S.; Rafiq, M.; Qureshi, M.; Ansari, A.; Nawaz, R. Neural Networks Based Shunt Hybrid Active Power Filter for Harmonic Elimination. IEEE Access 2021, 9, 69913–69925. [Google Scholar] [CrossRef]
- Nguyen, T.N.; Luo, A.; Shuai, Z.; Chau, M.T.; Li, M.; Zhou, L. Generalised Design Method for Improving Control Quality of Hybrid Active Power Filter with Injection Circuit. IET Power Electron. 2014, 7, 1204–1215. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, J.; Feng, L.; Wang, C. A Novel Hybrid Modular Three-Level Shunt Active Power Filter. IEEE Trans. Power Electron. 2018, 33, 7591–7600. [Google Scholar] [CrossRef]
- Asiminoael, L.; Blaabjerg, F.; Hansen, S. Detection Is Key—Harmonic Detection Methods for Active Power Filter Applications. IEEE Ind. Appl. Mag. 2007, 13, 22–33. [Google Scholar] [CrossRef]
- Cleary-Balderas, A.; Medina-Rios, A.; Cruz-Hernéndez, O. Hybrid Active Power Filter Based on the IRP Theory for Harmonic Current Mitigation. In Proceedings of the 2016 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 9–11 November 2016; pp. 1–5. [Google Scholar]
- Khalid, S.; Kumar, N.; Mishra, V. Performance Evaluation of Adaptive Tabu Search Algorithm Optimized Sinusoidal Fryze Voltage Control Based Hybrid Series Active Power Filter. Int. J. Electr. Eng. Inform. 2014, 6, 511–520. [Google Scholar] [CrossRef]
- Abdullah, A.; Biswal, G.R.; Roy, A.K. Modeling and Control of Hybrid Power Filter Using P-q Theory. In Proceedings of the 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016; pp. 1–6. [Google Scholar]
- Luo, A.; Shuai, Z.; Zhu, W.; Fan, R.; Tu, C. Development of Hybrid Active Power Filter Based on the Adaptive Fuzzy Dividing Frequency-Control Method. IEEE Trans. Power Deliv. 2009, 24, 424–432. [Google Scholar] [CrossRef]
- Somlal, J.; Rao, M.V.G.; Karthikeyan, S.P. Experimental Investigation of an Indirect Current Controlled Fuzzy-SVPWM Based Shunt Hybrid Active Power Filter. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 801–806. [Google Scholar]
- Durna, E. Adaptive Fuzzy Hysteresis Band Current Control for Reducing Switching Losses of Hybrid Active Power Filter. IET Power Electron. 2018, 11, 937–944. [Google Scholar] [CrossRef]
- Zhou, X.; Cui, Y.; Ma, Y. Fuzzy Linear Active Disturbance Rejection Control of Injection Hybrid Active Power Filter for Medium and High Voltage Distribution Network. IEEE Access 2021, 9, 8421–8432. [Google Scholar] [CrossRef]
- Mekhilef, S.; Tarek, M.; Abd Rahim, N. Rahim Single-Phase Hybrid Active Power Filter with Adaptive Notch Filter for Harmonic Current Estimation. IETE J. Res. 2011, 57, 20–28. [Google Scholar] [CrossRef] [Green Version]
- Rahmani, S.; Hamadi, A.; Al-Haddad, K. A Lyapunov-Function-Based Control for a Three-Phase Shunt Hybrid Active Filter. IEEE Trans. Ind. Electron. 2012, 59, 1418–1429. [Google Scholar] [CrossRef]
- Wong, M.-C.; Pang, Y.; Xiang, Z.; Wang, L.; Lam, C.-S. Assessment of Active and Hybrid Power Filters Under Space Vector Modulation. IEEE Trans. Power Electron. 2021, 36, 2947–2963. [Google Scholar] [CrossRef]
- Gong, C.; Sou, W.-K.; Lam, C.-S. Second-Order Sliding-Mode Current Controller for LC-Coupling Hybrid Active Power Filter. IEEE Trans. Ind. Electron. 2021, 68, 1883–1894. [Google Scholar] [CrossRef]
- Das, S.R.; Ray, P.; Sahoo, A.; Ramasubbareddy, S.; Thanikanti, S.B.; Manoj Kumar, N.; Haes Alhelou, H.; Siano, P. Performance of Hybrid Filter in a Microgrid Integrated Power System Network Using Wavelet Techniques. Appl. Sci. 2020, 10, 6792. [Google Scholar] [CrossRef]
- Choi, W.-H.; Lam, C.-S.; Wong, M.-C.; Han, Y.-D. Analysis of DC-Link Voltage Controls in Three-Phase Four-Wire Hybrid Active Power Filters. IEEE Trans. Power Electron. 2013, 28, 2180–2191. [Google Scholar] [CrossRef]
- Wang, Y.; Xie, Y.-X.; Liu, X. Analysis and Design of DC-Link Voltage Controller in Shunt Active Power Filter. J. Power Electron. 2015, 15, 763–774. [Google Scholar] [CrossRef]
- Pazhanimuthu, C.; Baranilingesan, I.; Karthick, A. An Improved Control Algorithm for Series Hybrid Active Power Filter Based on SOGI-PLL under Dynamic Load Conditions. Solid State Commun. 2021, 333, 114357. [Google Scholar] [CrossRef]
- Daniel, J.P.; Nagarajan, C. Hybrid Filter for Distorted Voltage Source in Microgrids. In Proceedings of the 2018 Conference on Emerging Devices and Smart Systems (ICEDSS), Tiruchengode, India, 2–3 March 2018; pp. 11–15. [Google Scholar]
- Hui, N.; Luo, Z.; Feng, Y.; Han, X. A Novel Grid Synchronization Method Based on Hybrid Filter under Distorted Voltage Conditions. IEEE Access 2020, 8, 65636–65648. [Google Scholar] [CrossRef]
- Akagi, H.; Kondo, R. A Transformerless Hybrid Active Filter Using a Three-Level Pulse width Modulation (PWM) Converter for a Medium-Voltage Motor Drive. IEEE Trans. Power Electron. 2010, 25, 1365–1374. [Google Scholar] [CrossRef]
- Hatti, N.; Hasegawa, K.; Akagi, H. A 6.6-KV Transformerless Motor Drive Using a Five-Level Diode-Clamped PWM Inverter for Energy Savings of Pumps and Blowers. IEEE Trans. Power Electron. 2009, 24, 352–358. [Google Scholar] [CrossRef]
- Lu, J.; Fu, P.; Li, J.; Mao, H.; Shen, X.; Xu, L.; Wu, Y. A New Hybrid Filter Based on Differential Current Control Method for Low-Order Harmonic Suppression in Tokamak Power System. Int. J. Energy Res. 2017, 42, 82–90. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.; Yinyu, C.; Wei, M. Modeling and Control of a Novel Hybrid Power Quality Compensation System for 25-KV Electrified Railway. Energies 2019, 12, 3303. [Google Scholar] [CrossRef] [Green Version]
- Gong, C.; Sou, W.-K.; Lam, C.-S. Design and Analysis of Vector Proportional–Integral Current Controller for LC-Coupling Hybrid Active Power Filter With Minimum DC-Link Voltage. IEEE Trans. Power Electron. 2021, 36, 9041–9056. [Google Scholar] [CrossRef]
- Cui, G.; Luo, L.; Li, Y.; Liang, C.; Hu, S.; Xie, B.; Xu, J.; Zhang, Z.; Liu, Y.; Wang, T. YN/VD Connected Balance Transformer-Based Hybrid Power Quality Compensator for Harmonic Suppression and Reactive Power Compensation of Electrical Railway Power Systems. Int. J. Electr. Power Energy Syst. 2019, 113, 481–491. [Google Scholar] [CrossRef]
- Da, N.; Montoya, F.; Ababssi, N.; Djeghader, Y. A Hybrid Active Filter Using the Backstepping Controller for Harmonic Current Compensation. Symmetry 2019, 11, 1161. [Google Scholar] [CrossRef] [Green Version]
- Xue, G.; Chen, B.; Tian, C.; Yuan, J.; Zhou, Y.; Chen, G.; Luo, Y.; Chen, Y. A Novel Hybrid Active Power Filter with Multi-Coupled Coils. Electronics 2021, 10, 998. [Google Scholar] [CrossRef]
- Luo, Z.; Liu, Y.; Li, S.; Luo, Q. Selective harmonic active tuning control method for hybrid active power filters. J. Power Electron. 2021, 21, 932–940. [Google Scholar] [CrossRef]
- IEC Webstore. IEC 60079-0:2017. Explosive Atmospheres—Part 0: Equipment—General Requirements. Available online: https://webstore.iec.ch/publication/32878 (accessed on 12 July 2021).
- IEC Webstore. IEC 60079-1:2014. Explosive Atmospheres—Part 1: Equipment Protection by Flameproof Enclosures “d”. Available online: https://webstore.iec.ch/publication/621 (accessed on 12 July 2021).
- IEC Webstore. IEC 60079-11:2011. Explosive Atmospheres—Part 11: Equipment Protection by Intrinsic Safety “i”. Available online: https://webstore.iec.ch/publication/626 (accessed on 12 July 2021).
- Intrinsically Safe (IS) Active Power Supplies. Available online: https://docplayer.net/55981159-Intrinsically-safe-is-active-power-supplies.html (accessed on 12 July 2021).
- Pontt, J.; Rodriguez, J.; Martin, J.S.; Aguilera, R.; Robles, H. Dynamic and Steady Behavior of Harmonic Filter for Compensating Resonance in Mining Systems. IFAC Proc. Vol. 2009, 42, 342–347. [Google Scholar] [CrossRef]
- Simpson, J.; Paredes, A.; Pontt, J.; Silva, C. Predictive Control of Active Filtering for Industrial Mining Installations. In Proceedings of the 2009 IEEE Industry Applications Society Annual Meeting, Houston, TX, USA, 4–8 October 2009; pp. 1–7. [Google Scholar]
- Hung, B.; Kovernikova, L. Analyzing the Potential for Using Active Filters to Reduce Voltage Nonsinusoidality in the Electric Power Supply System of a Coal Open-Cut in Vietnam. E3S Web Conf. 2019, 114, 04006. [Google Scholar] [CrossRef]
- Luiz, A.-S.A.; de Jesus Cardoso Filho, B. Improving Power Quality in Mining Industries with a Three-Level Active Front End. In Proceedings of the 2015 IEEE Industry Applications Society Annual Meeting, Addison, TX, USA, 18–22 October 2015; pp. 1–9. [Google Scholar]
- Roos, F.; Bansal, R.C. Reactive Power and Harmonic Compensation: A Case Study for the Coal-Mining Industry. J. Energy South. Afr. 2019, 30, 34–48. [Google Scholar] [CrossRef]
- Pogorelov, A.V. Improving Filter-Compensating Devices in Power Supply Systems of Mine Hoists. In Proceedings of the 2019 International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon), Vladivostok, Russia, 1–4 October 2019; pp. 1–4. [Google Scholar]
- Yaghoobi, J.; Abdullah, A.; Kumar, D.; Zare, F.; Soltani, H. Power Quality Issues of Distorted and Weak Distribution Networks in Mining Industry: A Review. IEEE Access 2019, 7, 162500–162518. [Google Scholar] [CrossRef]
- Buła, D.; Grabowski, D.; Lewandowski, M.; Maciążek, M.; Piwowar, A. Software Solution for Modeling, Sizing, and Allocation of Active Power Filters in Distribution Networks. Energies 2021, 14, 133. [Google Scholar] [CrossRef]
- Liu, K.; Cao, W.; Zhao, J. Dual-Loop-Based Harmonic Current Control Strategy and Admittance Modeling for a Multimodular Parallel SAPFs System. IEEE Trans. Ind. Electron. 2020, 67, 5456–5466. [Google Scholar] [CrossRef]
- Buła, D.; Pasko, M. Model of Hybrid Active Power Filter in the Frequency Domain. In Proceedings of the Analysis and Simulation of Electrical and Computer Systems, Czarna, Poland, 27–30 September 2013; Gołębiowski, L., Mazur, D., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 15–26. [Google Scholar]
- Golestan, S.; Guerrero, J.M.; Vasquez, J.C.; Abusorrah, A.M.; Al-Turki, Y. Modeling, Tuning, and Performance Comparison of Second-Order-Generalized-Integrator-Based FLLs. IEEE Trans. Power Electron. 2018, 33, 10229–10239. [Google Scholar] [CrossRef] [Green Version]
- Pasko, M.; Maciażek, M.; Bula, D. Performance and Accuracy Comparison of Fixed and Floating-Point Realizations of the Active Power Filter Control Algorithm. In Proceedings of the 2008 International School on Nonsinusoidal Currents and Compensation, Lagow, Poland, 10–13 June 2008; pp. 1–4. [Google Scholar]
- Buła, D.; Pasko, M. Stability Analysis of Hybrid Active Power Filter. Bull. Pol. Acad. Sci. Tech. Sci. 2014, 62, 279–286. [Google Scholar] [CrossRef] [Green Version]
- Du, X.; Zhao, C.; Xu, J. The Use of the Hybrid Active Power Filter in LCC-HVDC Considering the Delay-Dependent Stability. IEEE Trans. Power Deliv. 2021, 1. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Harmonic | Load Current | Grid Current, CL2 without Delay Compensation | Grid Current, CL2 with Delay Compensation |
|---|---|---|---|
| 1 | 15.3 A/100% | 14.8 A/100% | 14.9 A/100% |
| 5 | 10.0 A/65.7% | 2.3 A/15.5% | 0.24 A/1.6% |
| 7 | 6.3 A/41.3% | 0.60 A/4.1% | 0.60 A/3.7% |
| 11 | 1.3 A/8.3% | 0.36 A/2.4% | 0.04 A/0.3% |
| 13 | 1.2 A/7.6% | 0.40 A/2.7% | 0.04 A/0.3% |
| 17 | 0.76 A/5.0% | 0.36 A/2.4% | 0.03 A/0.4% |
| THD | 78.8% | 17.1% | 5.3% |
| Parameter | Description | Value |
|---|---|---|
| VN | Rated line-to-line voltage RMS value | 1000 V |
| IN | Rated phase current RMS value | 30 A |
| VDCN | dc link rated voltage | 400 V |
| fsw | Switching frequency | 20 kHz |
| LF | Passive filter inductance | 4.6 mH |
| CF | Passive filter capacitance | 45 μF |
| CDC | dc link capacitance | 1.2 mF |
| K | Gain factor | 25–35 |
| KP | dc voltage controller proportional gain | 1 |
| TI | dc voltage controller integration time | 40 ms |
| fc | LPF and HPF cutoff frequency | 25 Hz |
| Harmonic | Load Current | Grid Current |
|---|---|---|
| 1 | 26.0 A/100% | 28.4 A/100% |
| 5 | 18.2 A/70.0% | 0.36 A/1.3% |
| 7 | 12.7 A/48.8% | 0.32 A/1.1% |
| 11 | 2.81 A/10.8% | 0.47 A/1.7% |
| 13 | 0.30 A/1.2% | 0.56 A/2.0% |
| 17 | 0.97 A/3.7% | 0.03 A/0.1% |
| 19 | 0.58 A/2.2% | 0.3 A/1.0% |
| THD | 85.8% | 3.8% |
| Harmonic | Load Current | Grid Current |
|---|---|---|
| 1 | 24.6 A/100% | 25.0 A/100% |
| 5 | 5.58 A/22.7% | 0.08 A/0.3% |
| 7 | 2.47 A/10.0% | 0.11 A/0.4% |
| 11 | 1.88 A/7.6% | 0.29 A/1.2% |
| 13 | 1.19 A/4.5% | 0.19 A/0.8% |
| 17 | 0.9 A/3.7% | 0.17 A/0.7% |
| 19 | 0.42 A/1.7% | 0.52 A/2.1% |
| THD | 26.0% | 4.0% |
| Harmonic | Load Current | Grid Current |
|---|---|---|
| 1 | 24.7 A/100% | 25.6 A/100% |
| 5 | 6.57 A/26.6% | 0.25 A/1.0% |
| 7 | 6.29 A/23.5% | 0.21 A/0.9% |
| 11 | 3.35 A/13.5% | 0.38 A/1.5% |
| 13 | 0.9 A/3.6% | 0.21 A/0.9% |
| 17 | 0.82 A/3.3% | 0.1 A/0.4% |
| 19 | 0.41 A/1.7% | 0.34 A/1.3% |
| THD | 39.4% | 4.2% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buła, D.; Michalak, J.; Zygmanowski, M.; Adrikowski, T.; Jarek, G.; Jeleń, M. Control Strategy of 1 kV Hybrid Active Power Filter for Mining Applications. Energies 2021, 14, 4994. https://doi.org/10.3390/en14164994
Buła D, Michalak J, Zygmanowski M, Adrikowski T, Jarek G, Jeleń M. Control Strategy of 1 kV Hybrid Active Power Filter for Mining Applications. Energies. 2021; 14(16):4994. https://doi.org/10.3390/en14164994
Chicago/Turabian StyleBuła, Dawid, Jarosław Michalak, Marcin Zygmanowski, Tomasz Adrikowski, Grzegorz Jarek, and Michał Jeleń. 2021. "Control Strategy of 1 kV Hybrid Active Power Filter for Mining Applications" Energies 14, no. 16: 4994. https://doi.org/10.3390/en14164994
APA StyleBuła, D., Michalak, J., Zygmanowski, M., Adrikowski, T., Jarek, G., & Jeleń, M. (2021). Control Strategy of 1 kV Hybrid Active Power Filter for Mining Applications. Energies, 14(16), 4994. https://doi.org/10.3390/en14164994