2.2. Selection of Optimal AC Motor–Gearhead Ratio
The selection procedure aims to find an optimal coupled pair of an AC motor and gearhead to ensure the maximum efficiency of the entire driving system. In this optimization task, three main independent components comprising the electric drive system—the AC motor’s nominal power, number of stator poles, and gear ratio—should be chosen from the manufacturer’s nomenclature. This task is intricate because the AC motor is managed with VFD. The voltage and frequency of VFD should be independently controlled under the necessary motion at each moment. Besides, restrictions related to the AC motor’s admissible parameters (maximum allowable voltage and frequency range) are imposed. It is worth pointing out that the minimum losses on the entire load cycle following the principle of the maximum are ensured by the minimal losses in each time segment. Therefore, the criterion of the optimal selection (Equation (1)) for any AC motor–gearbox pair with the obligatory construction (Equation (2)) and restrictions (Equation (3)) can be represented as follows:
where
is the total motor–gear losses in the
ith time interval,
is the rotation velocity in the
ith time interval,
is torque, (
) are the voltage and frequency supplied by the VFD in the
ith time interval,
is the maximum admissible motor voltage supply, and (
,
) are frequencies that are the minimum affordable with VFD and the maximum permissible for the AC motor.
Therefore, the above-mentioned optimization procedure for any AC motor–gear ratio combination for which construction (2) can be accomplished by the minimization of losses in each segment of time can ensure a minimum of the summarized average losses in the entire driving cycle:
The selection can be recognized as the appropriate choice for a given driving cycle if the average power losses are not more than the nominal ones.
where
and
are the rated motor power and efficiency.
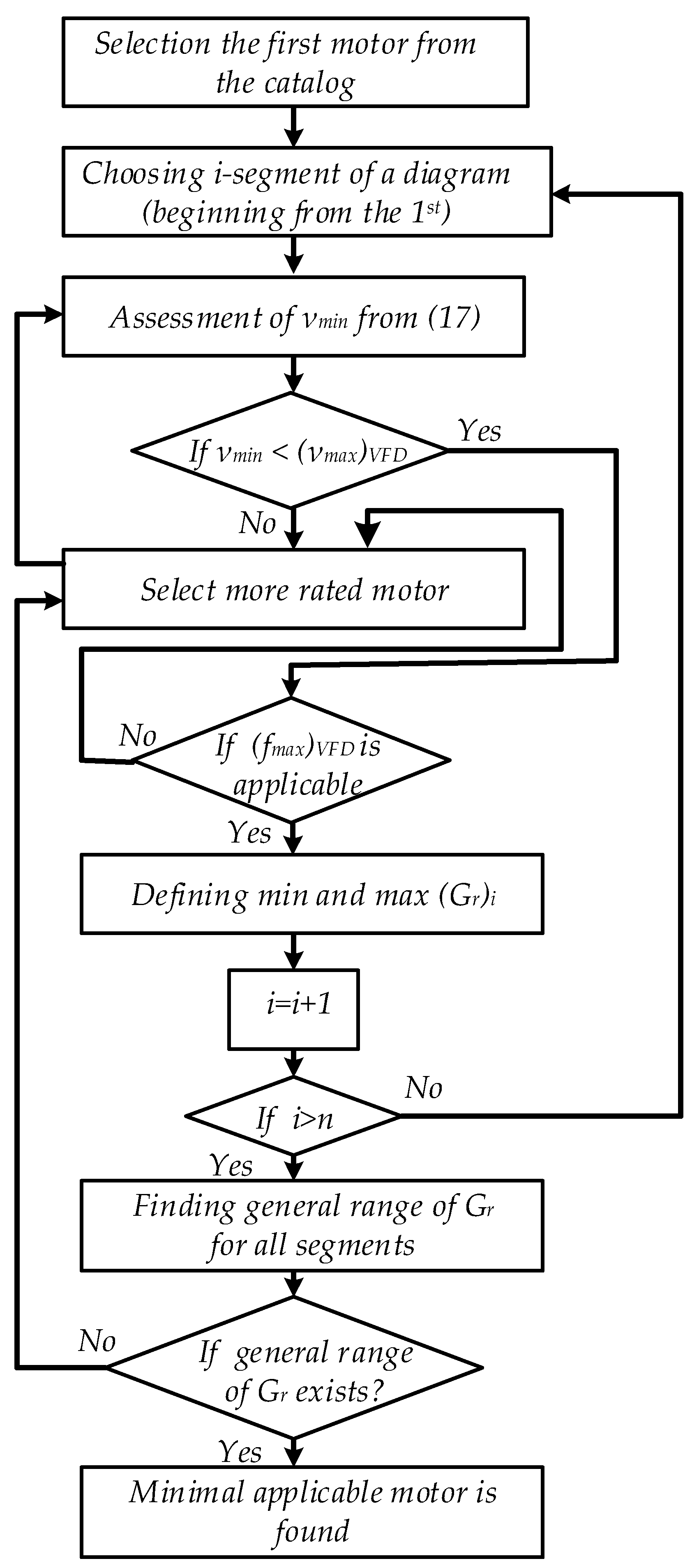
The motors located in the manufacturer’s catalog in ascending order of power are applicable for the task. However, the optimal motor is the one with the minimum size. Therefore, the first motor in the manufacturer’s catalog should be taken as the optimal solution, which satisfies Equation (5).
The proposed solution signifies a combinatorial optimization in which one parameter for the selection (gear ratio) should have a permanent value for the average driving cycle and therefore for the vehicle functionality. The two others (voltage magnitude and supply frequency) are permanently controlled. The possible gear ratio values must be selected at the first step of the solution.
2.3. Matching of AC Motor–Gearbox Coupling
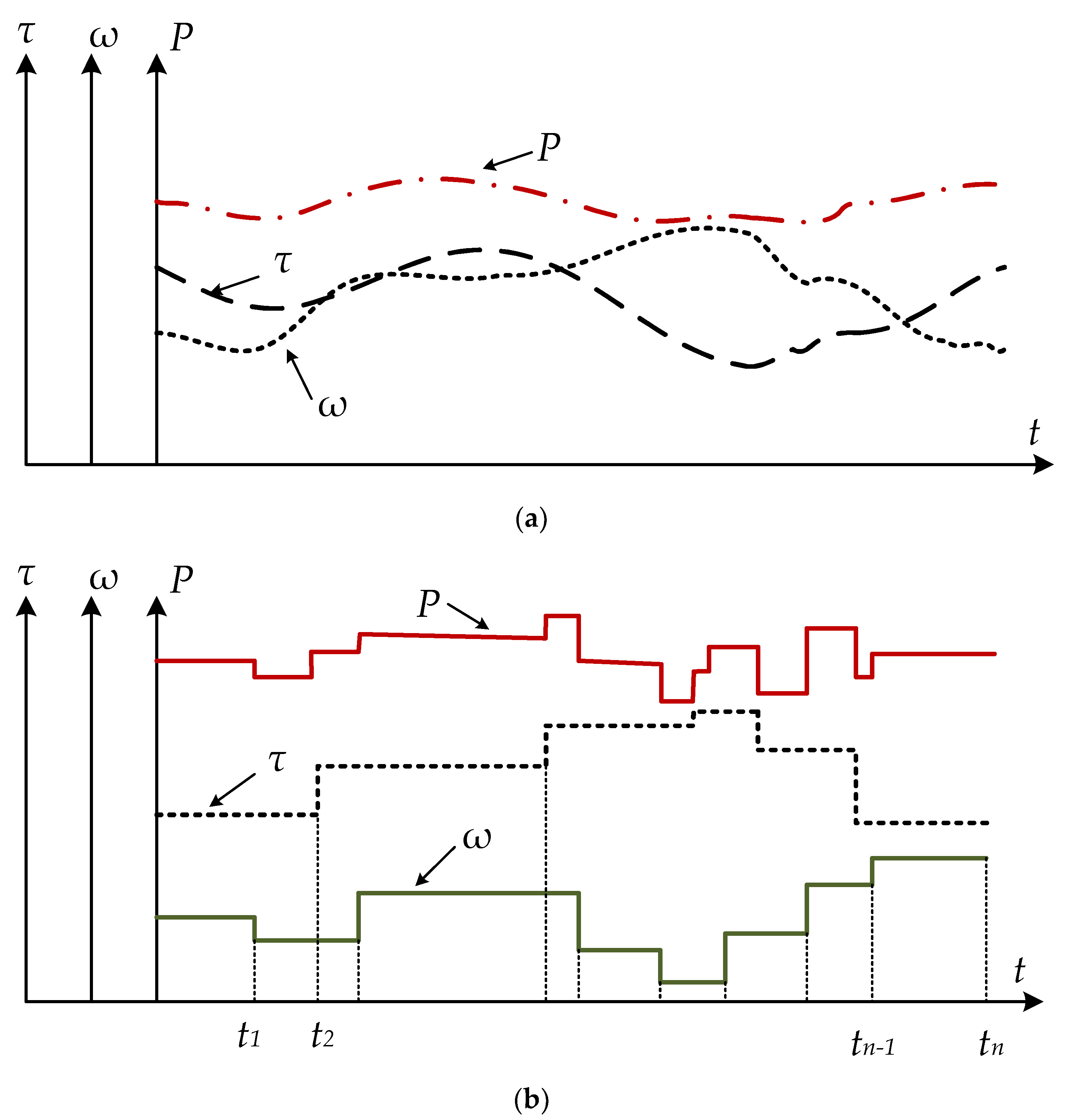
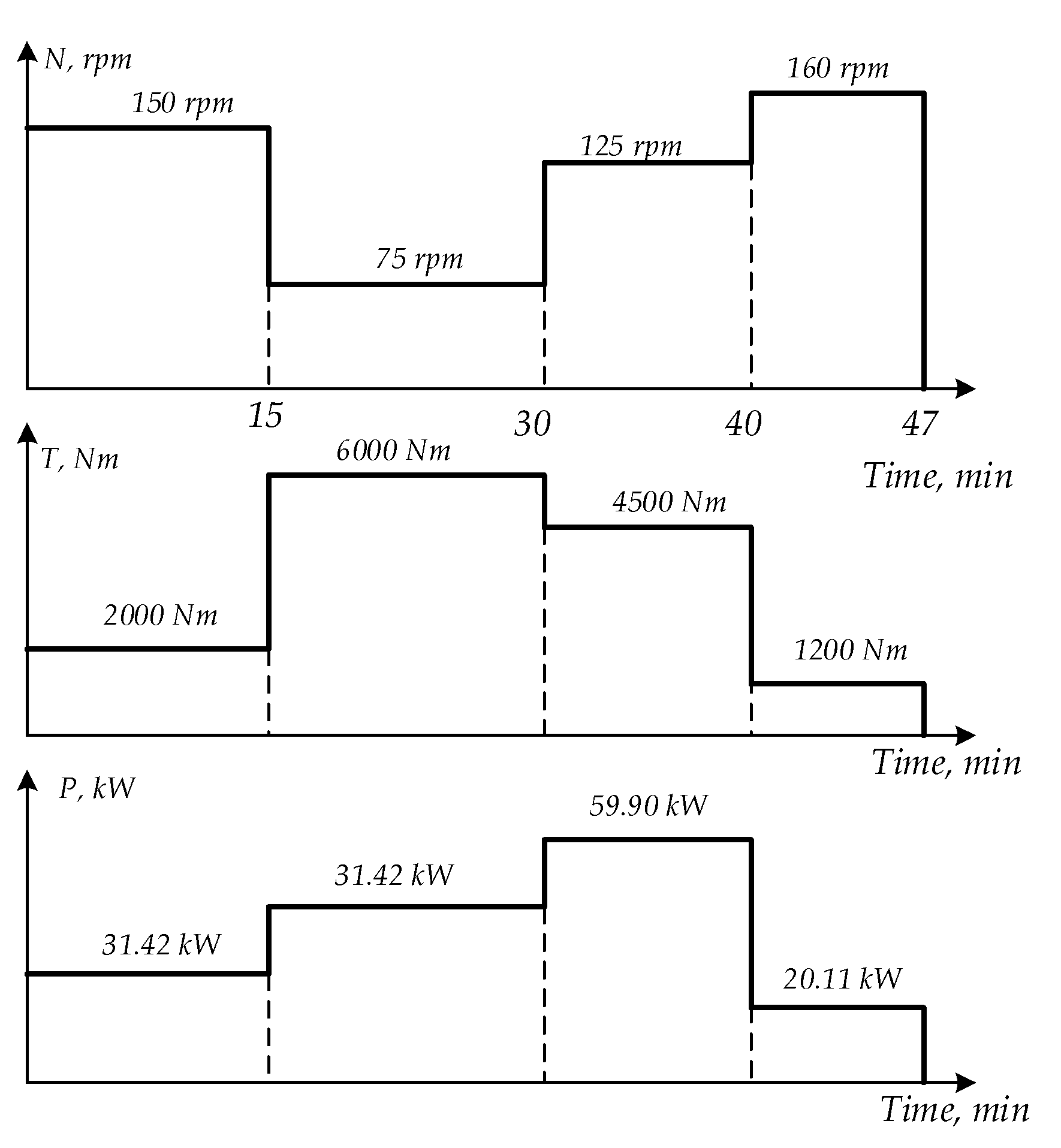
Considering a rapid and significant change of the required rotation velocity, torque, and driving power during the transportation cycle, the choice of an appropriate motor coupled with a gearbox represents an important challenge. Therefore, the approach based on the energy conservation law was chosen for the solution of this task. Thus, each segment of power required by vehicle is taken into consideration. A motor provides this power through a gearbox. The power needed in each driving segment is bigger than the net driving efforts because of the inevitable losses in a gearbox:
where
is the power of the driving efforts in the
ith time interval of the transportation diagram,
is the rotation velocity in the
ith time interval,
is the rotation velocity and torque in the
ith time interval, and
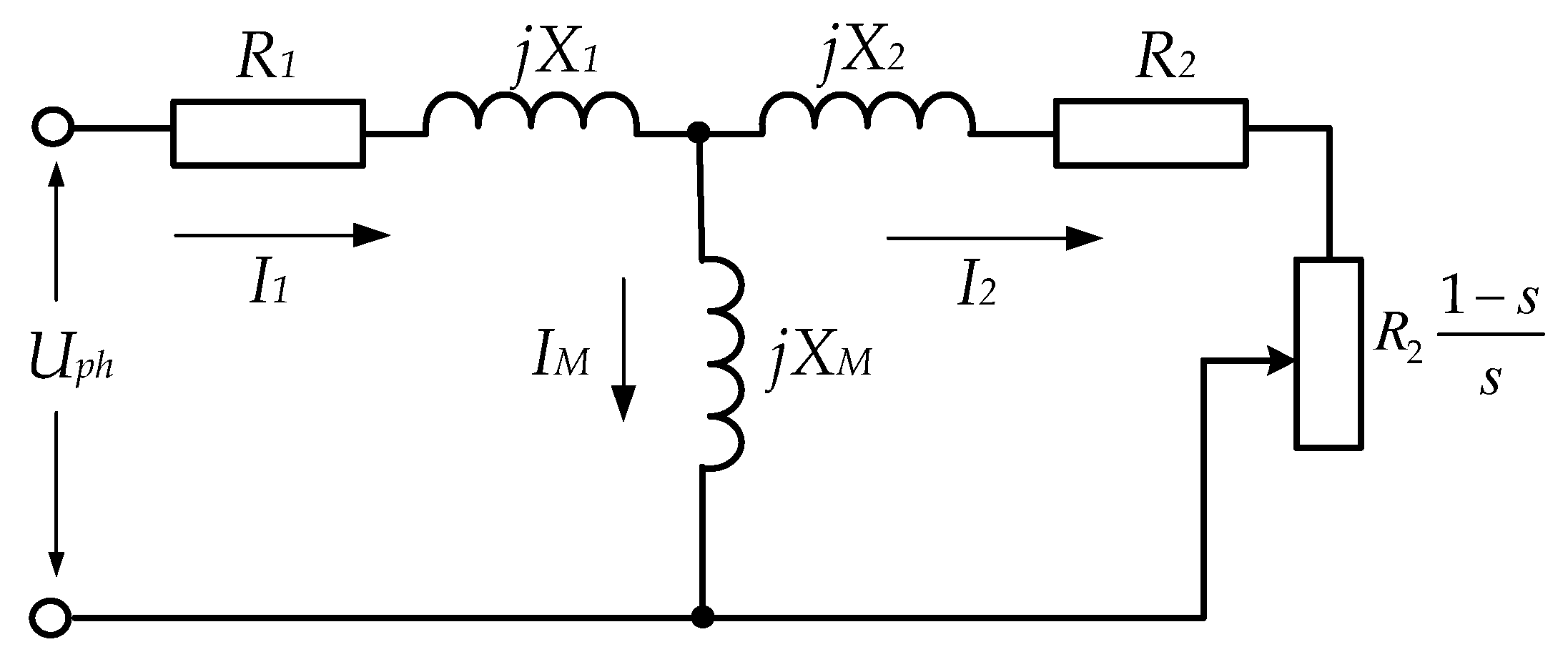
is the efficiency of the gearbox. The ransportation diagram of a vehicle is a time-dependent function of the required torque vs. a driving velocity. It is challenging to select motor feeding parameters because of the uncertain choice. Numerous combinations of voltages and frequency can ensure the necessary power. Therefore, the AC motor parameters are analysed by the T-equivalent circuit (
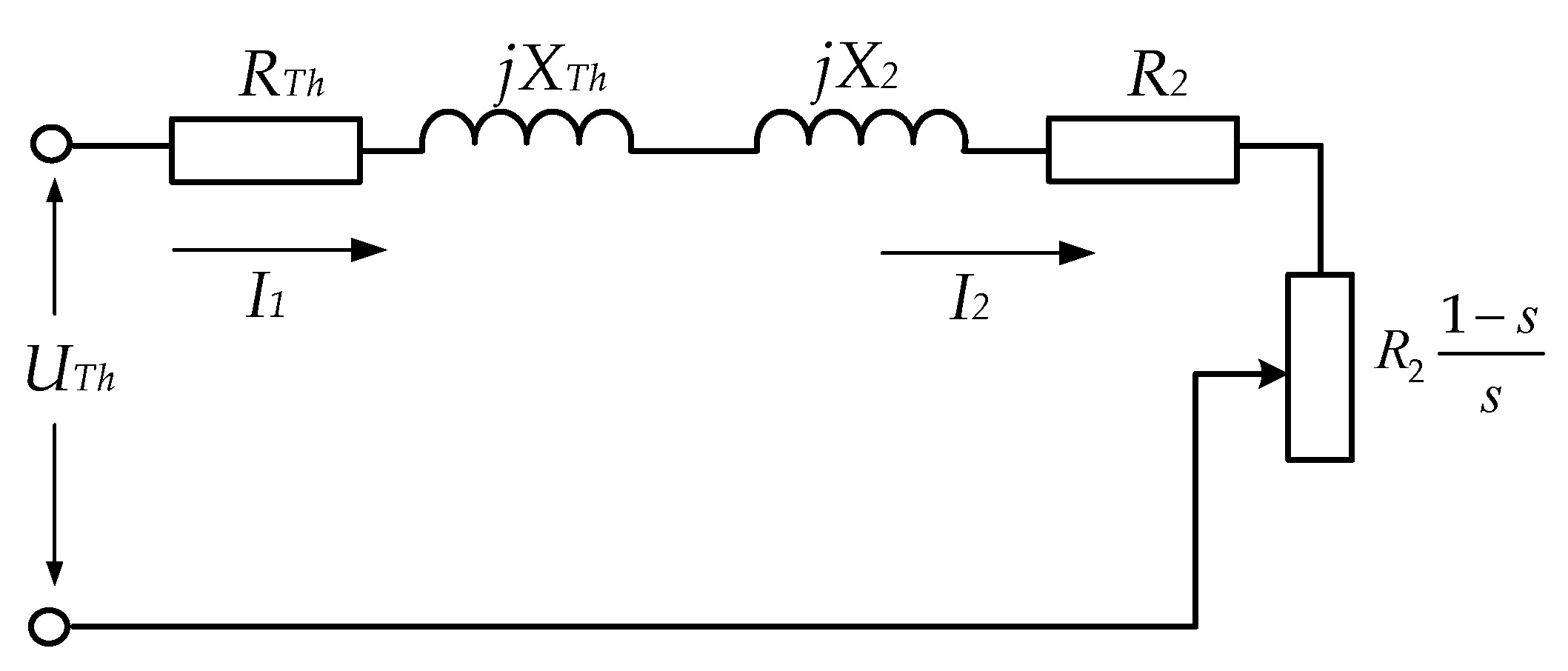
Figure 2). The equivalent circuit can be simplified for convenience with the Thevenin approach [
40]. The simplified equivalent circuit is demonstrated in
Figure 3.
Parameters
,
, and
are determined with the Kirchhoff circuit rules as follows:
wre
,
, and
operators signify absolute, real, and imagined magnitudes of the complex variables. Simplified expressions for
,
, and
are suitable for the calculations when the AC motor is supplied with nominal or slightly deviated voltages and frequencies.
Motor parameters (torque, velocity slip) vs. the applied voltage and frequency can be connected by the following expression [
40]:
where
and
are synchronous and current motor rotation velocities, respectively.
Motor power and other motor characteristics can be defined based on Equation (8).
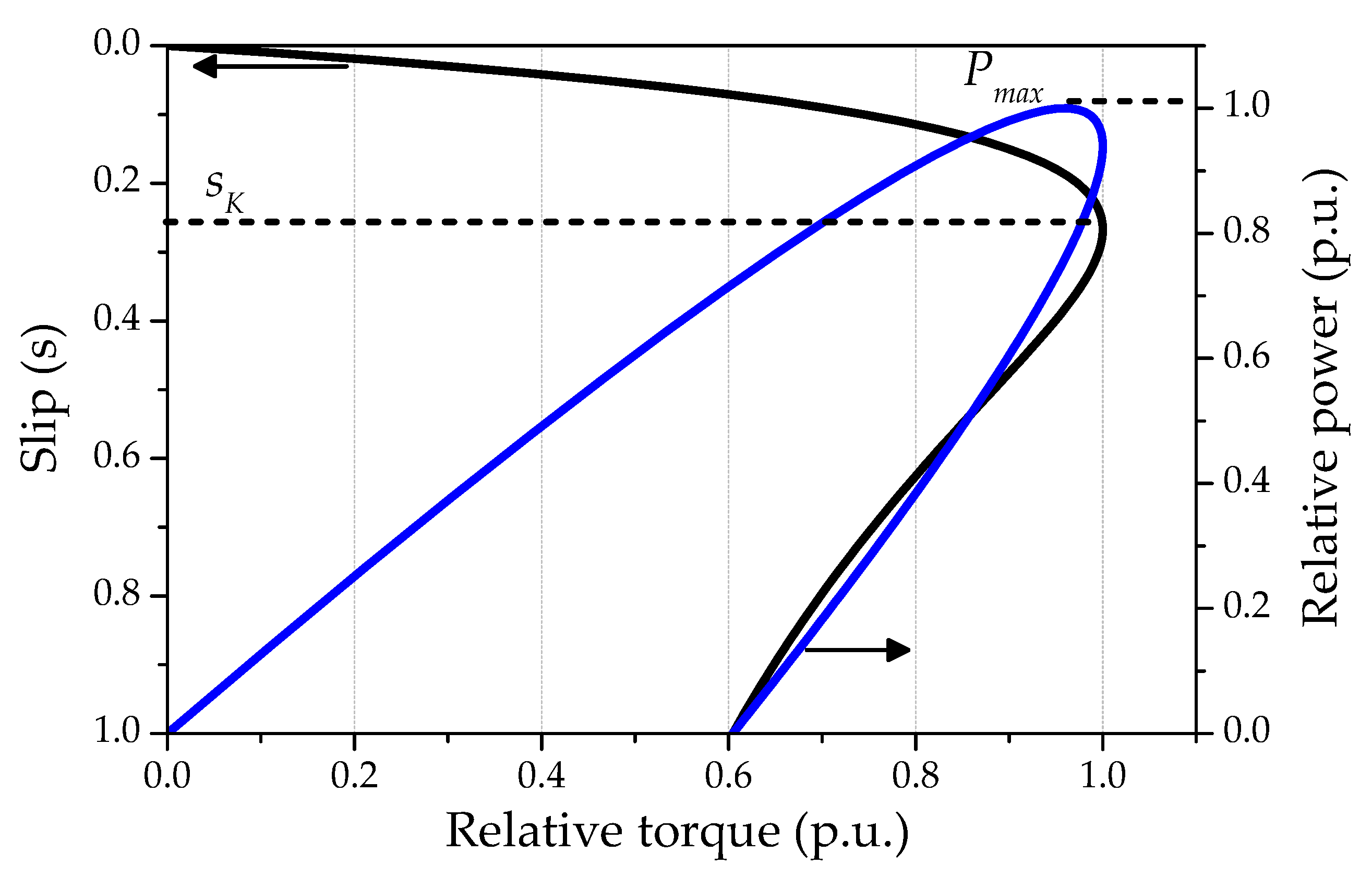
Figure 4 displays the typical AC motor parameters: critical slip (
) and maximum power (
). The critical slip is the velocity slip corresponding to the maximum achievable torque (
). The power increases with motor loading until the power attains a maximum value (
), which should take place before the torque achieves a maximum value (
). The motor power depends on the feeding voltage and current frequency. The specific relation of the motor power is influenced by individual VFD characteristics. Most VFDs provide a voltage that is proportional to the frequency (
is constant). This relation provides the control of an AC induction motor with a constant magnetic flux and has well-known advantages such as maximum power and efficiency. Voltage increases with a frequency to some maximum limit (
450–480 V), which is restricted by the insulation breakdown capacity of a motor. After this point, even though the frequency increases, the voltage remains constant. The frequency range of a supplied voltage in VFD is also limited. The minimal frequency of the existing VFDs begins as usual from 5–10 Hz. The maximum frequency is limited in modern VFD below 80–100 Hz. This circumstance is defined by the maximal rotating ability of motor bearings and the ability of the conventional induction motors to operate at higher frequencies.
The power for the induction AC motor based on Equation (8) can be obtained as
where
p is the number of stator poles pairs; (
,
,
) are nondimensional parameters of resistance, reactance, and rotation velocity;
is the nominal electrical frequency of the motor supply; and
is the mechanical synchronous motor speed (rad/s).
In the initial range for most of the existing VFDs, the supply voltage depends on the frequency and can be described functionally as
. The linear approximation is accurate enough:
where
. is the magnitude of phase voltage, which depends on the frequency supplied by VFD,
is the initial voltage,
is the aspect ratio between the voltage magnitude and frequency value (
),
is the nominal frequency of the AC motor,
. is the relative frequency (
), and
is the nondimensional coefficient.
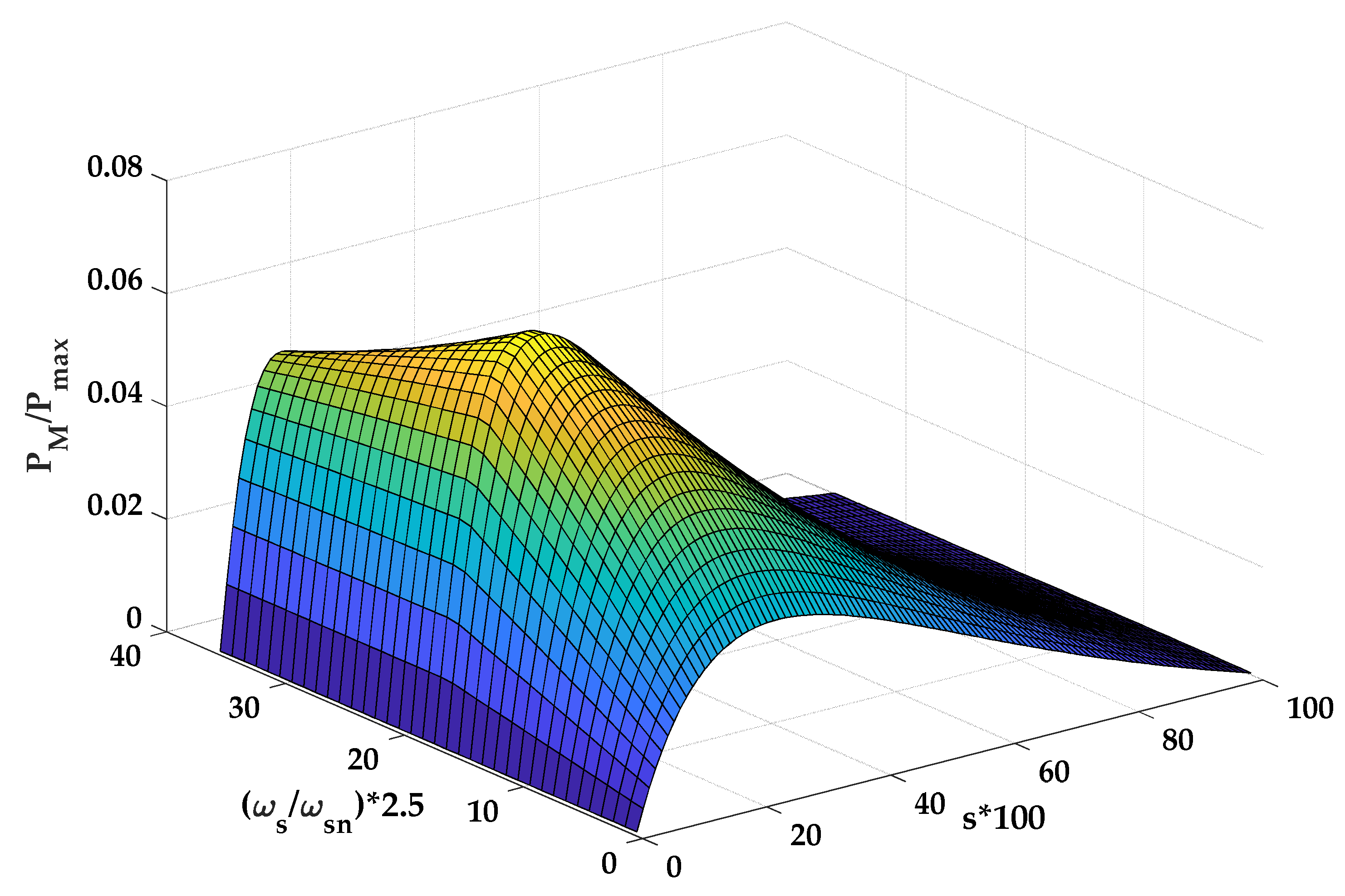
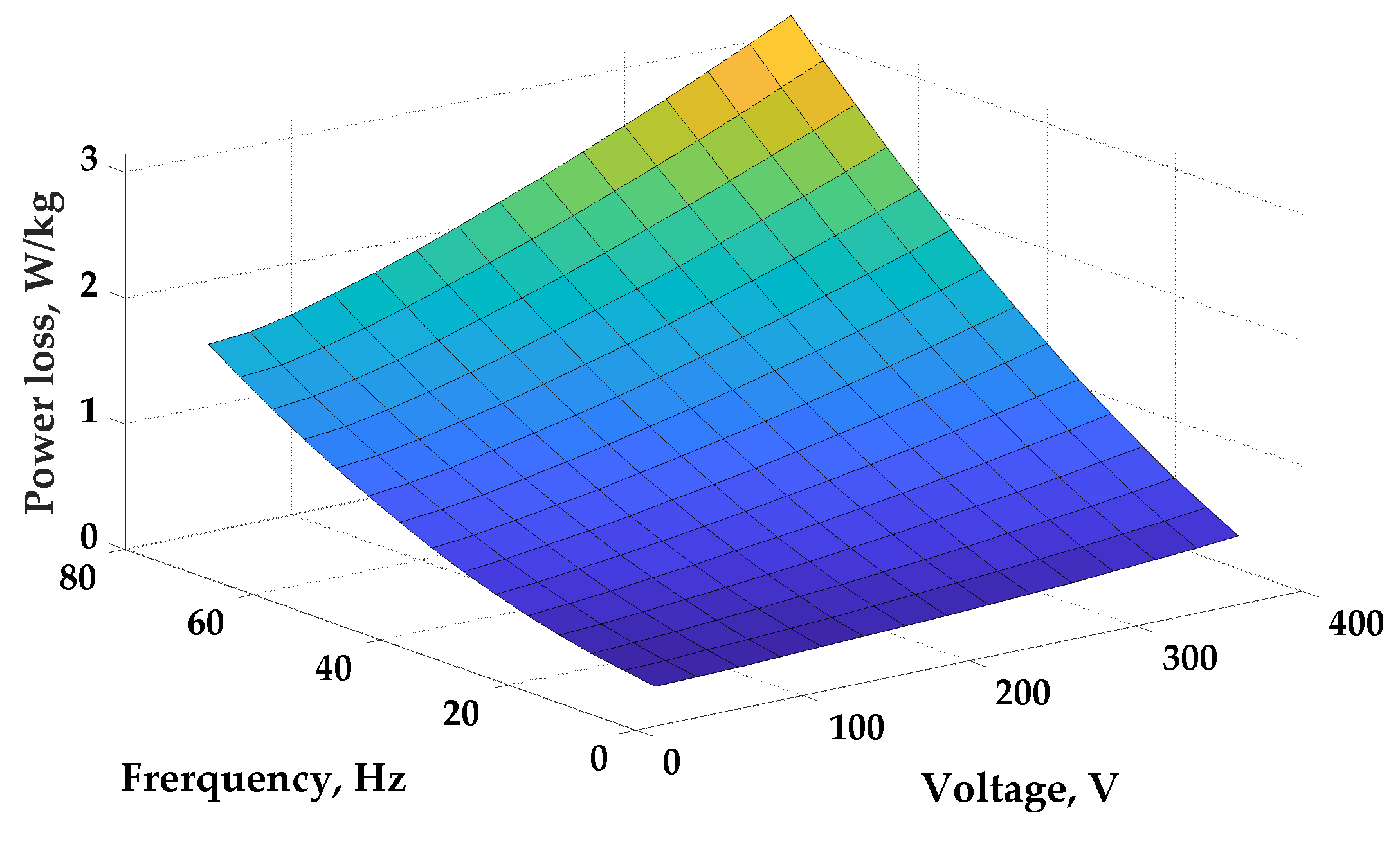
The supply voltage throughout the frequency range achieves a maximum permissible level of
. As a result, the Thevenin voltage and achievable motor power do not remain constant. Accordingly, the motor power increases until
and then slowly decreases. A 3D graph of relative power vs. frequency and slip alterations for typical VFD is presented in
Figure 5.
Equation (9) can be rearranged as follows:
A nondimensional equation that is valid for the
ith interval of a loading diagram is compiled for the variable
:
After the simplification, a quadratic Equation (12) takes the form:
There are two possible solutions for
:
Two roots of
should be real and positive. As a result, the determinant in Equation (14) should be positive, together with the positivity of the third member in Equation (13). These conditions ensure both positive roots of
if
The requirement for the positivity of the determinant in Equation (14) is
The above equation shows bi-quadratic inequality for
. After the arrangement, and considering positive conditions only, we arrive at
The fulfillment of condition (17) automatically ensures inequality (15) as
Equation (17) determines the lower applicable limit of frequency for the
-segment of a motor operation:
The value of the minimum frequency should be well inside the frequency range of VFD. If this condition is not fulfilled, then a more powerful motor should be selected for consideration. If the condition of Equation (19) is satisfied, then the slip (
) has two positive roots. The smallest root should be chosen since only this causes stable motor functionality. The second positive root is bigger than the critical slip
and cannot provide regular motor operation. Therefore, the solution for feasible slip is
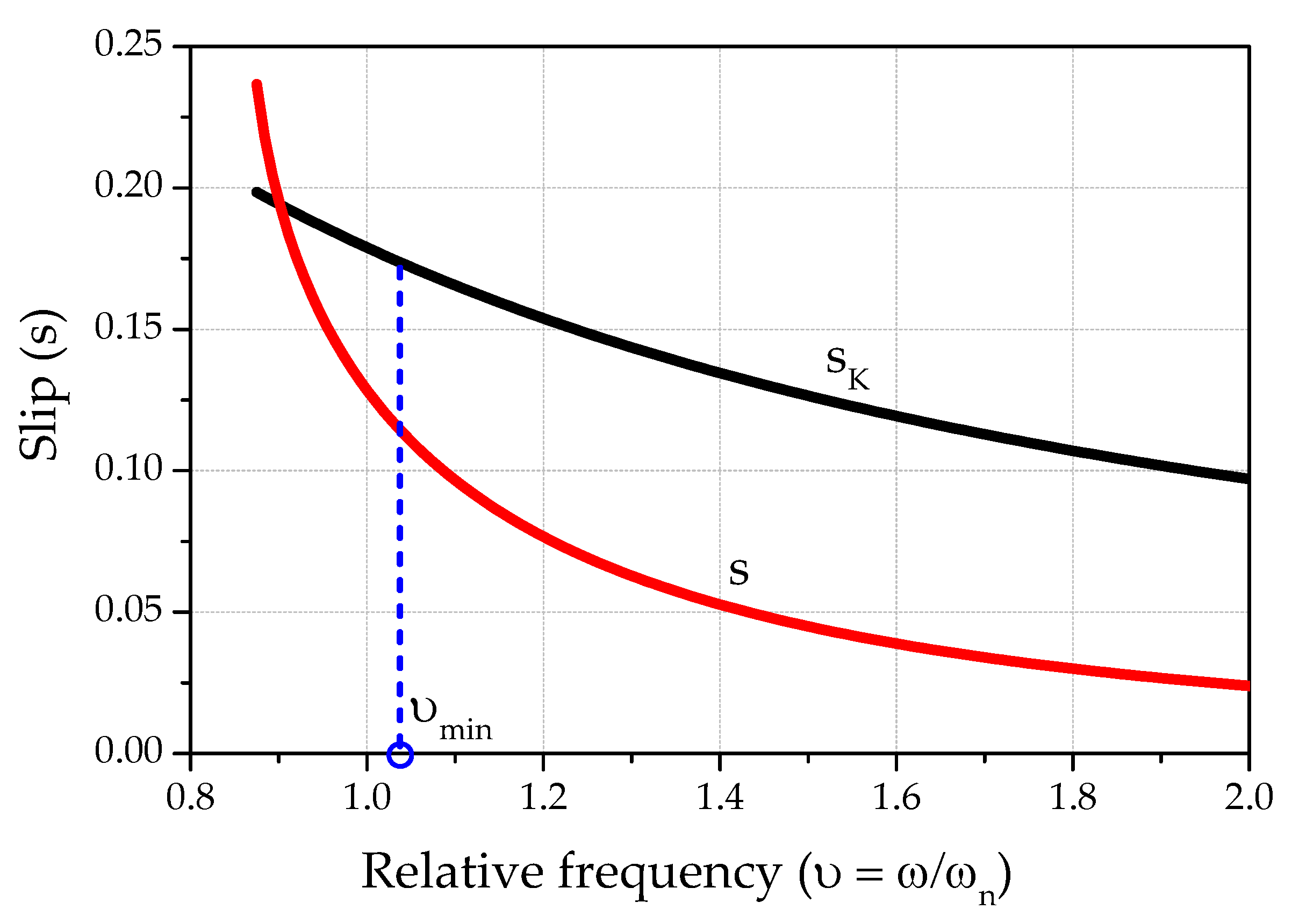
Motor slip (
) ensures the required output power and depends on the VFD frequency. Slip tends to diminish during increases in frequency, as evidenced by a negative derivative of Equation (20). The obtained slip should ensure stable and reliable motor functionality. For this purpose, it must be 1.5–1.7 times less than the critical slip (
). The critical slip is represented by nondimensional variables (
,
,
) as follows [
40]:
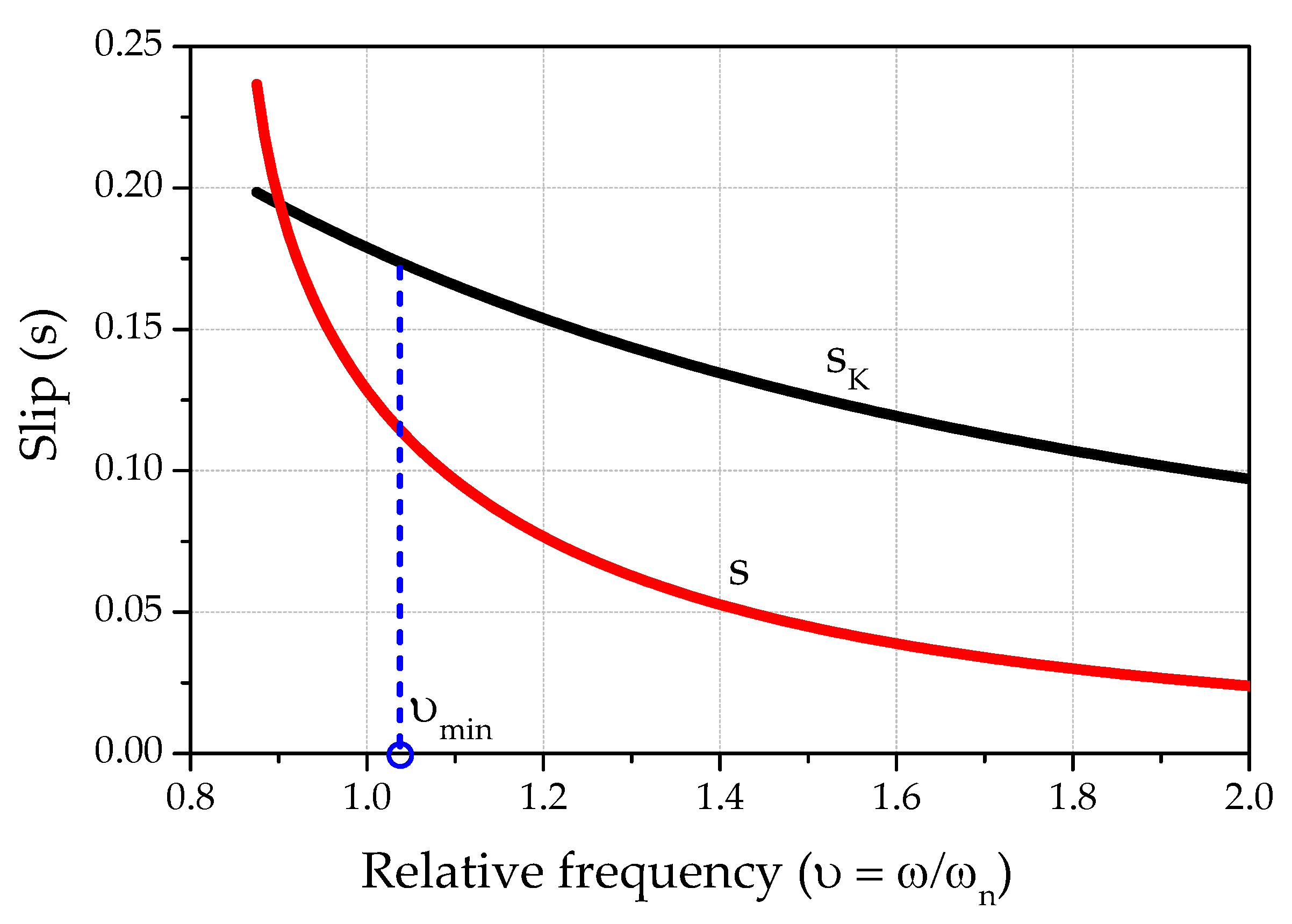
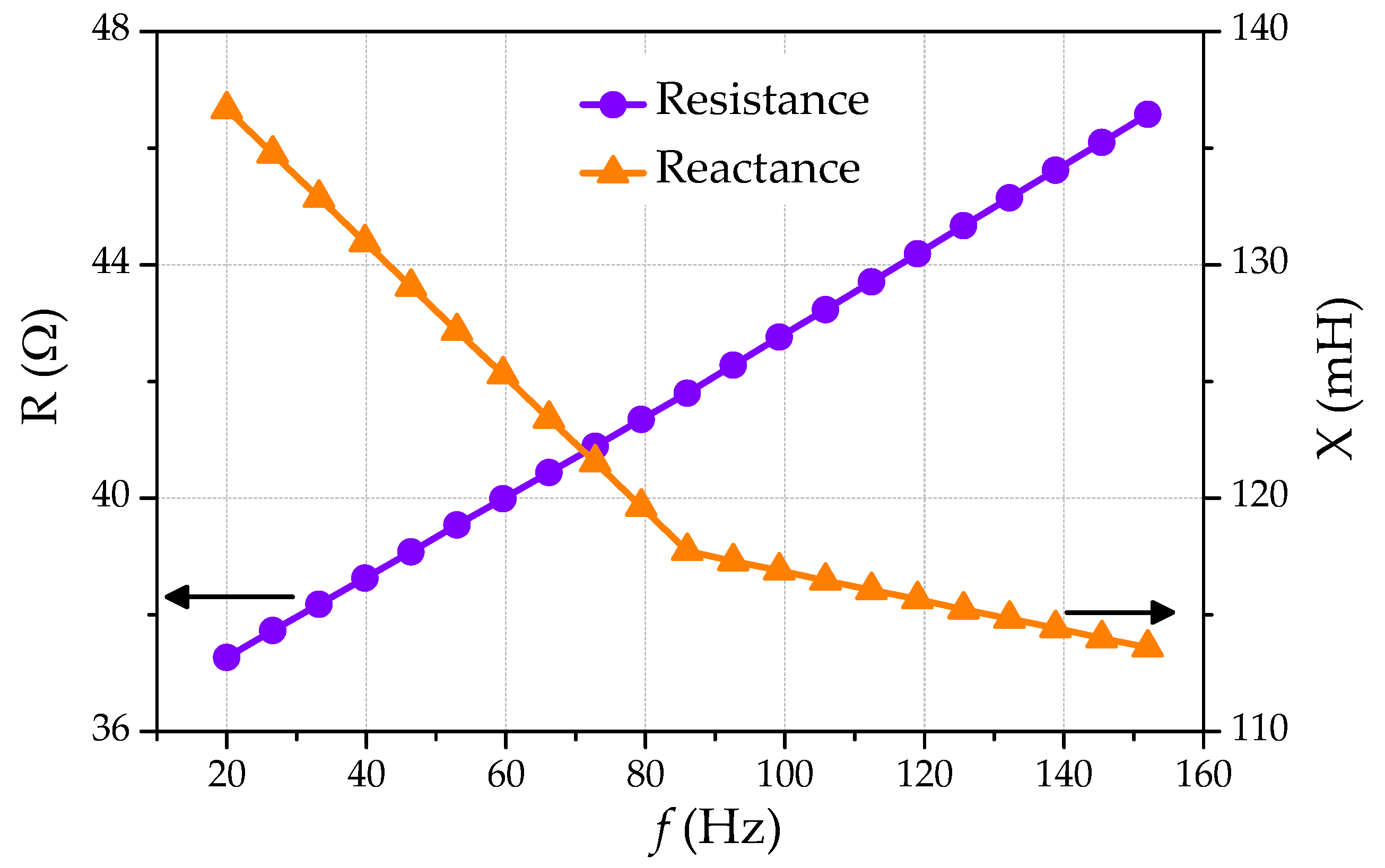
The relationship of
and
with the nondimensional parameter of frequency (
) is shown in
Figure 6. The curves were obtained for
1.5,
5, and
0.05. It is noticed that the
value diminishes as frequency increases; however, with a lower rate. Therefore, to guarantee the required clearance between
and
, a more rigorous inequality should be taken into consideration (Equation (22)).
This minimum applicable relative frequency (
) can be found from the following difference:
This equation can be solved with a numerical approach only because of its algebraic complexity. Importantly, it must be evaluated at the first step of the algorithm selection.
The VFD voltage control algorithm is significantly changed after the voltage attains the highest permissible value. As the voltage achieves maximum magnitude, it remains constant despite the increase in frequency. For many low-voltage VFDs, the maximum voltage limits are up to 450–480V. Equation (9) is modified to consider voltage permanence in this range of control:
For steady motor operation, the solution of Equation (23) is
Motor power decreases as frequency increases after the voltage achieves its maximum and remains constant. In principle, Equation (19) defines the maximum theoretically applicable frequency. Its relative value (
) can be found according to the requirement for the expression under the square root to be positive:
The vehicle motion control should ensure the required power (
) on each segment of the loading diagram for the entire frequency range if
[
] is less than the upper-frequency limit of VFD. If this condition cannot be ensured, then a more powerful electric motor should be chosen for consideration. The lower relative (Equation (22)) and upper (Equation (25)) frequencies provide the calculation of achievable slips
(Equation (14)) and
(Equation (24)), respectively. Motor rotation velocities corresponding to these slips are calculated as
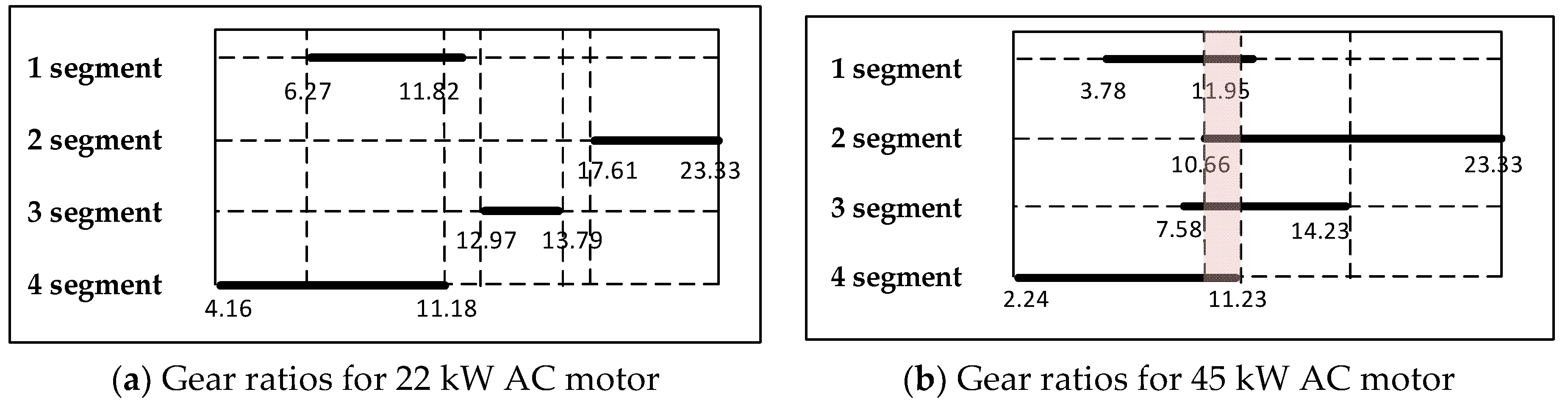
Finally, the gear ratio range
for each
-segment of a loading diagram is as follows:
The comparison of all ranges provides a generic span of gear ratios that is valid for the entire loading diagram. If a generic range is an empty set, then a more powerful motor should be selected.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}