
Comparison and Validation of Hydrodynamic Theories for Wave Energy Converter Modelling


Abstract
:1. Introduction
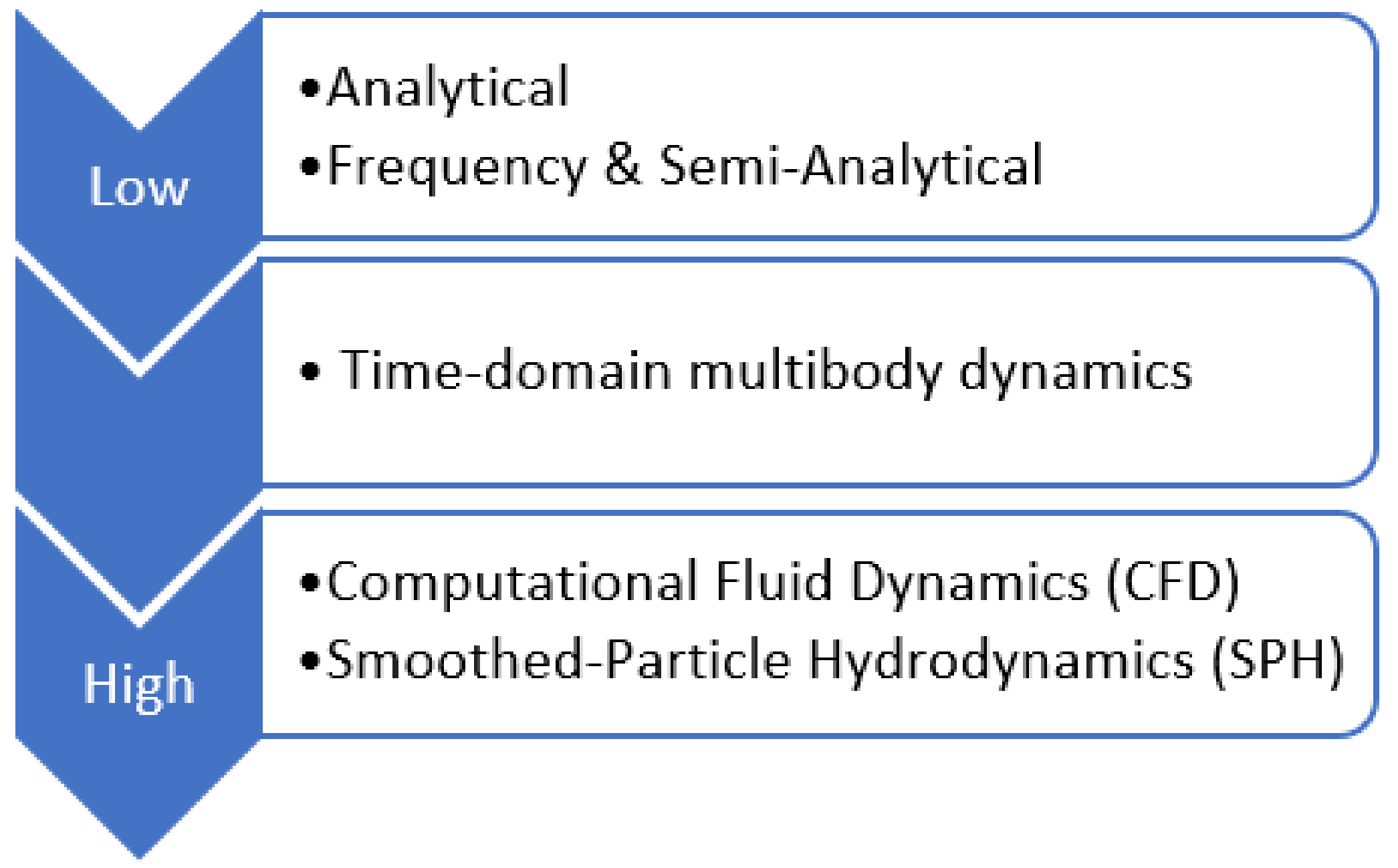
2. Wave Energy Converter Numerical Modelling Theory
2.1. Baseline WEC Modelling Theory
2.1.1. Excitation Force
2.1.2. Hydrostatic Force
2.1.3. Radiation Force
2.1.4. Power Take-Off (PTO) Force
2.1.5. Viscous Drag Force
2.1.6. Cable Force
2.2. Refined Numerical Theories
2.2.1. Weakly Nonlinear Froude-Krylov and Hydrostatic Forces
2.2.2. Body-to-Body Interactions
2.2.3. Dynamic Cables
3. Numerical Theory Implementations
3.1. ProteusDS
3.2. WEC-Sim
4. Case Study WEC and Field Campaign
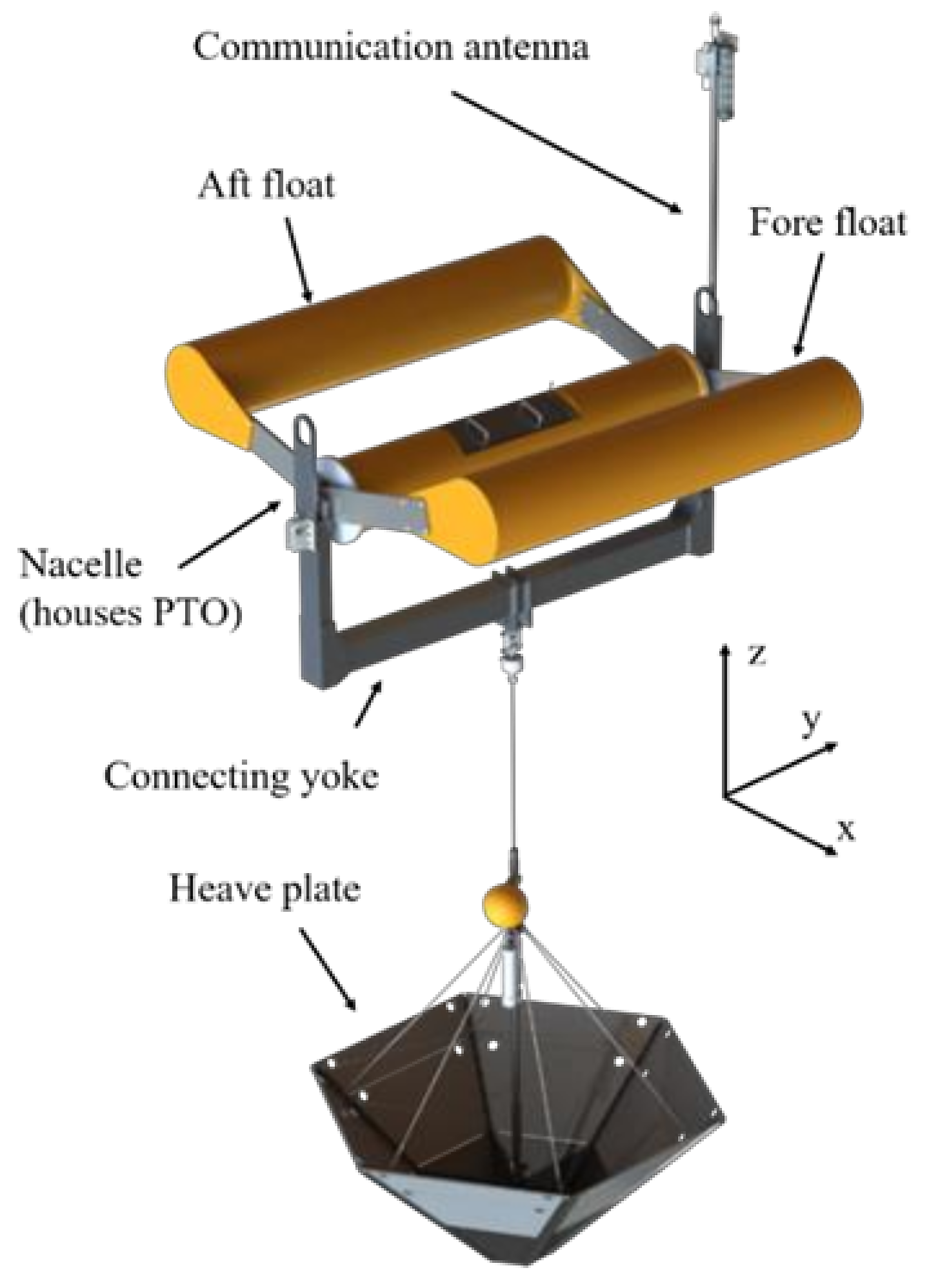
4.1. Wave Energy Buoy That Self-Deploys (WEBS)
4.2. Field Campaign Details
Wave Reconstruction Methods
5. Results and Discussion
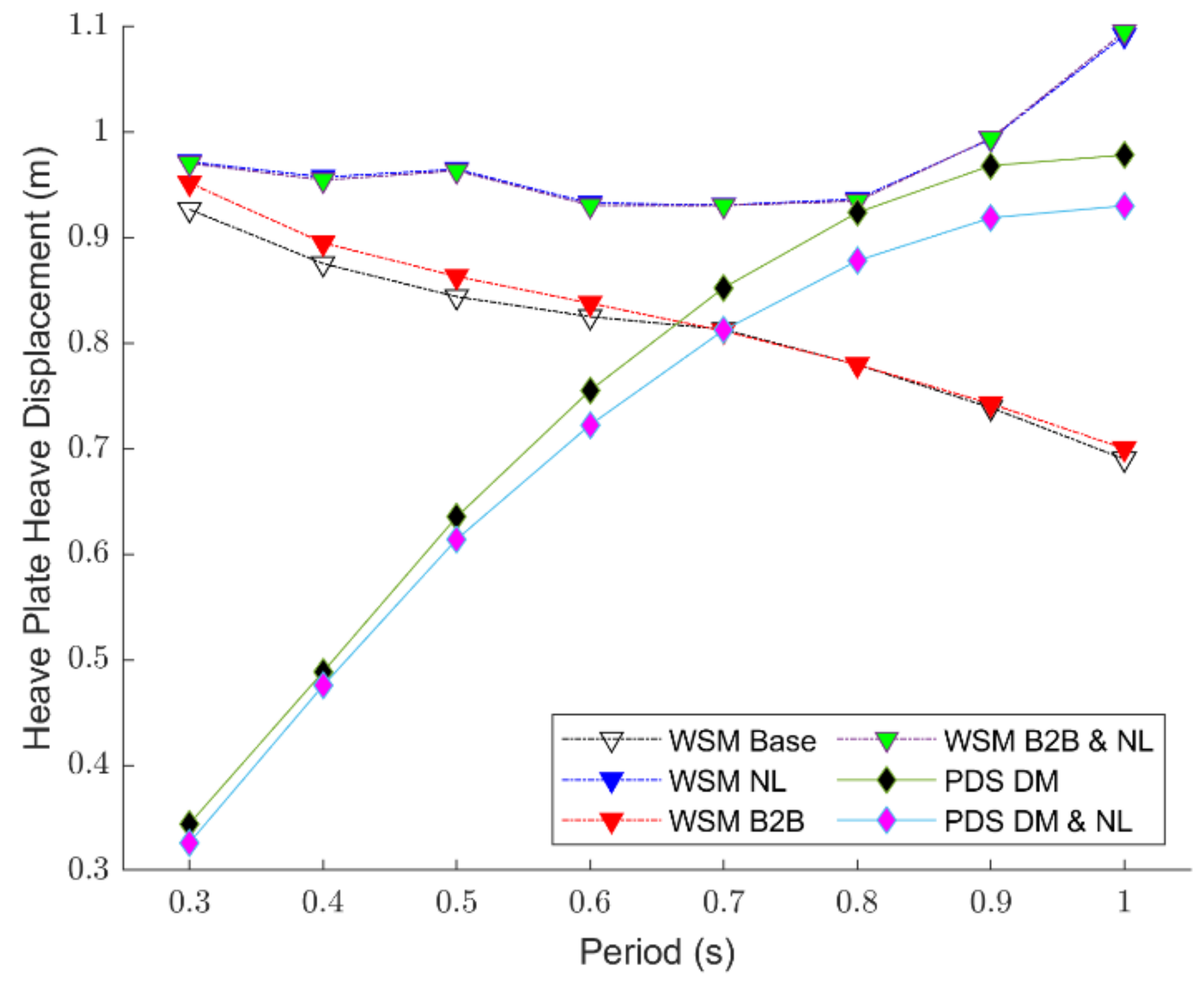
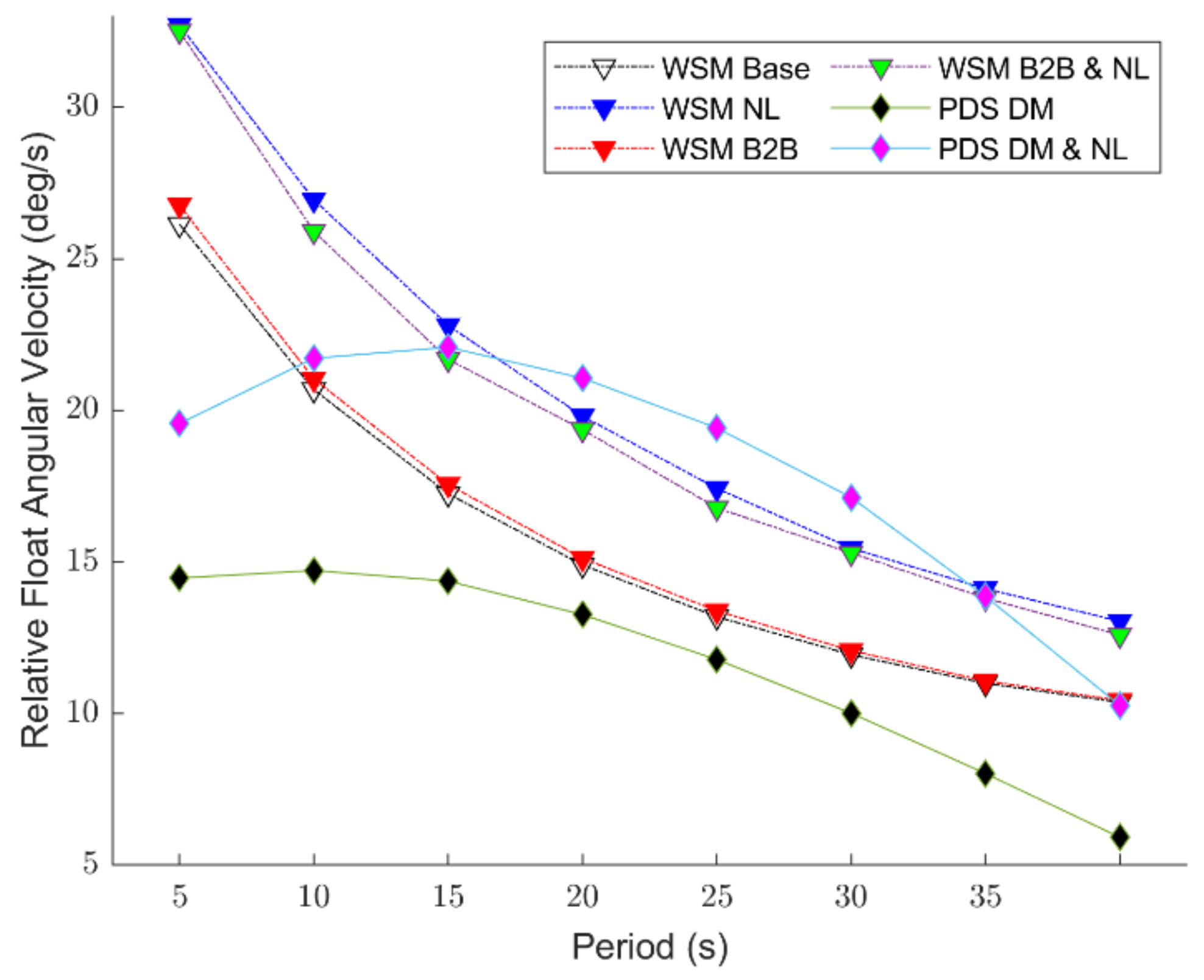
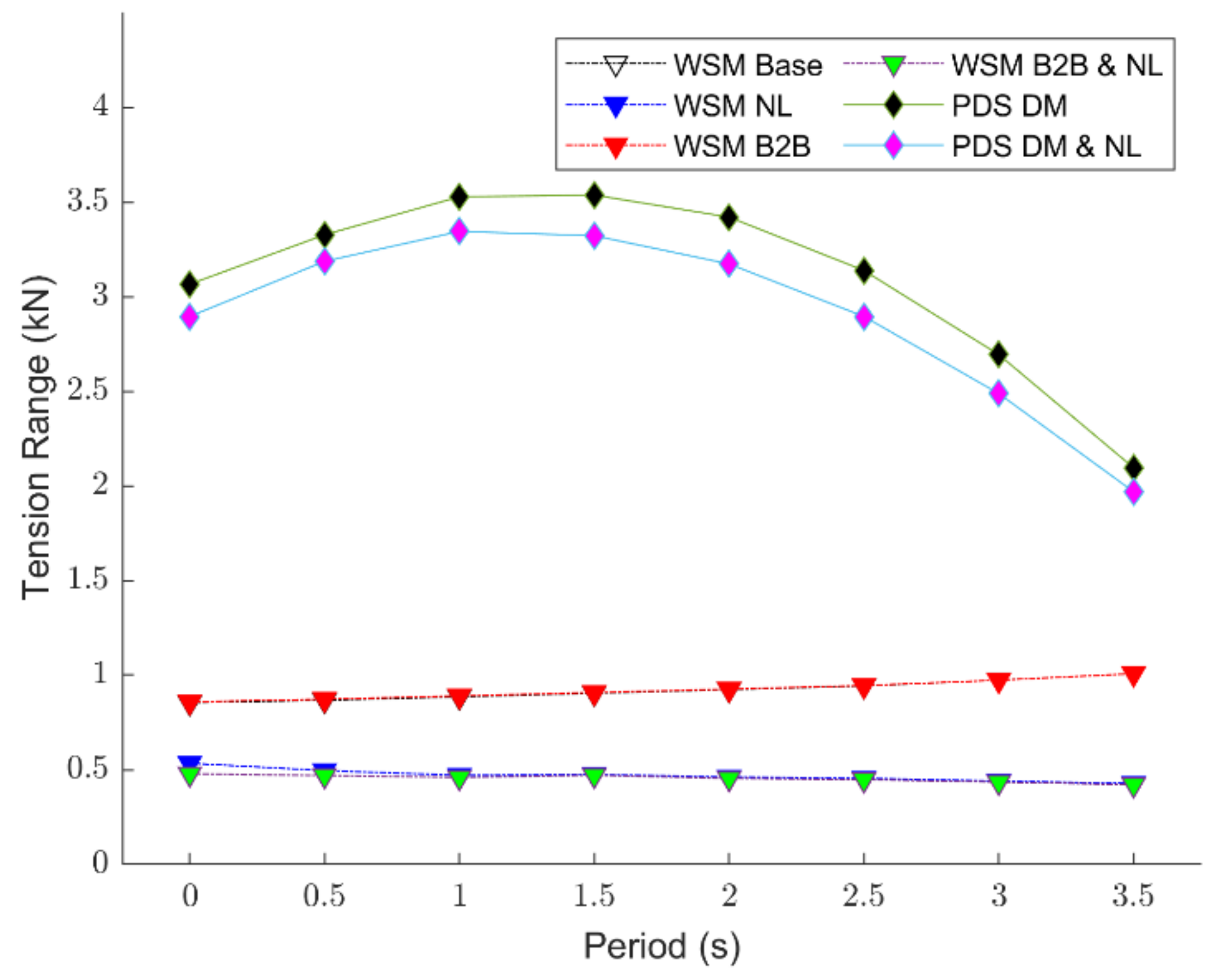
5.1. Code-to-Code Comparison
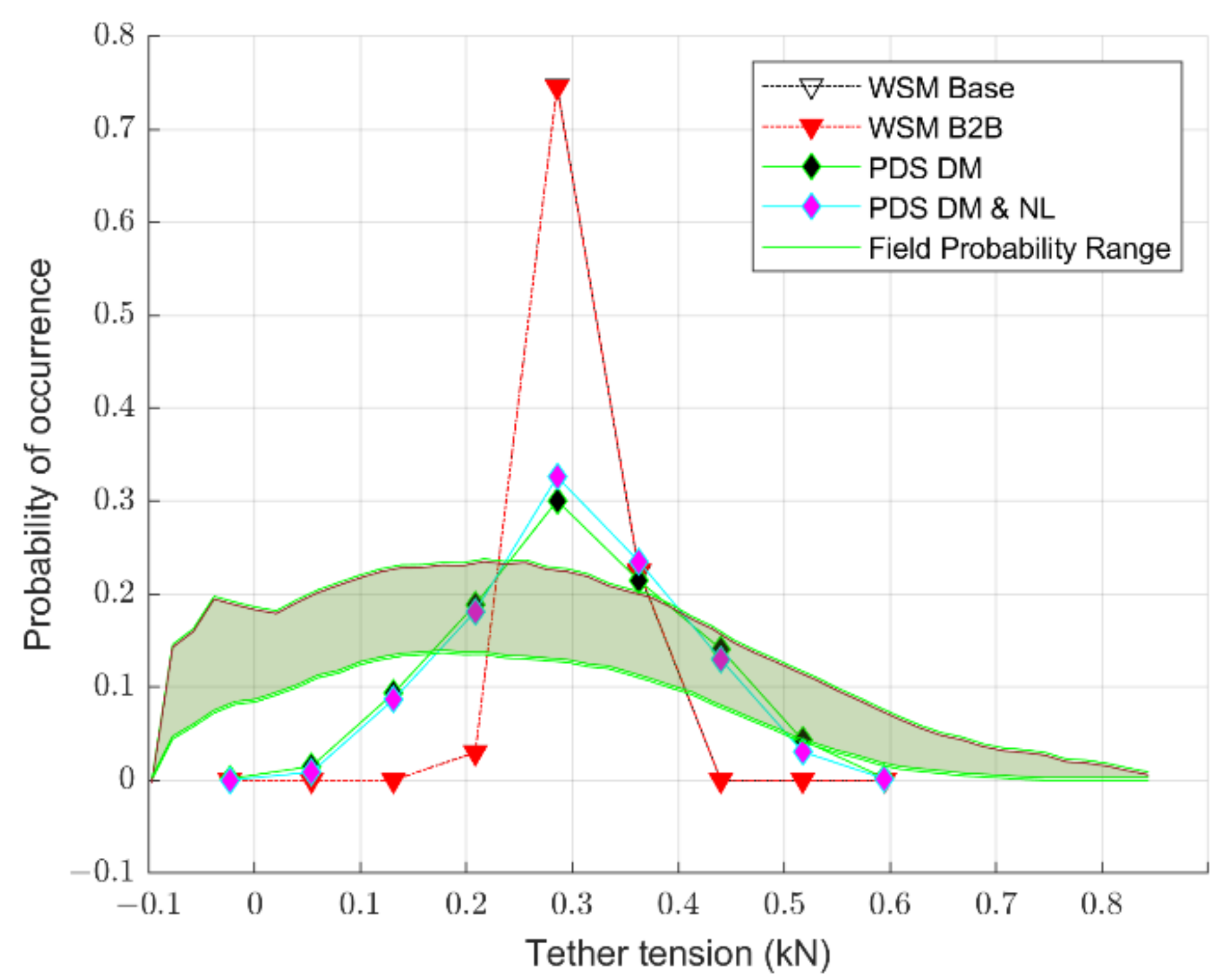
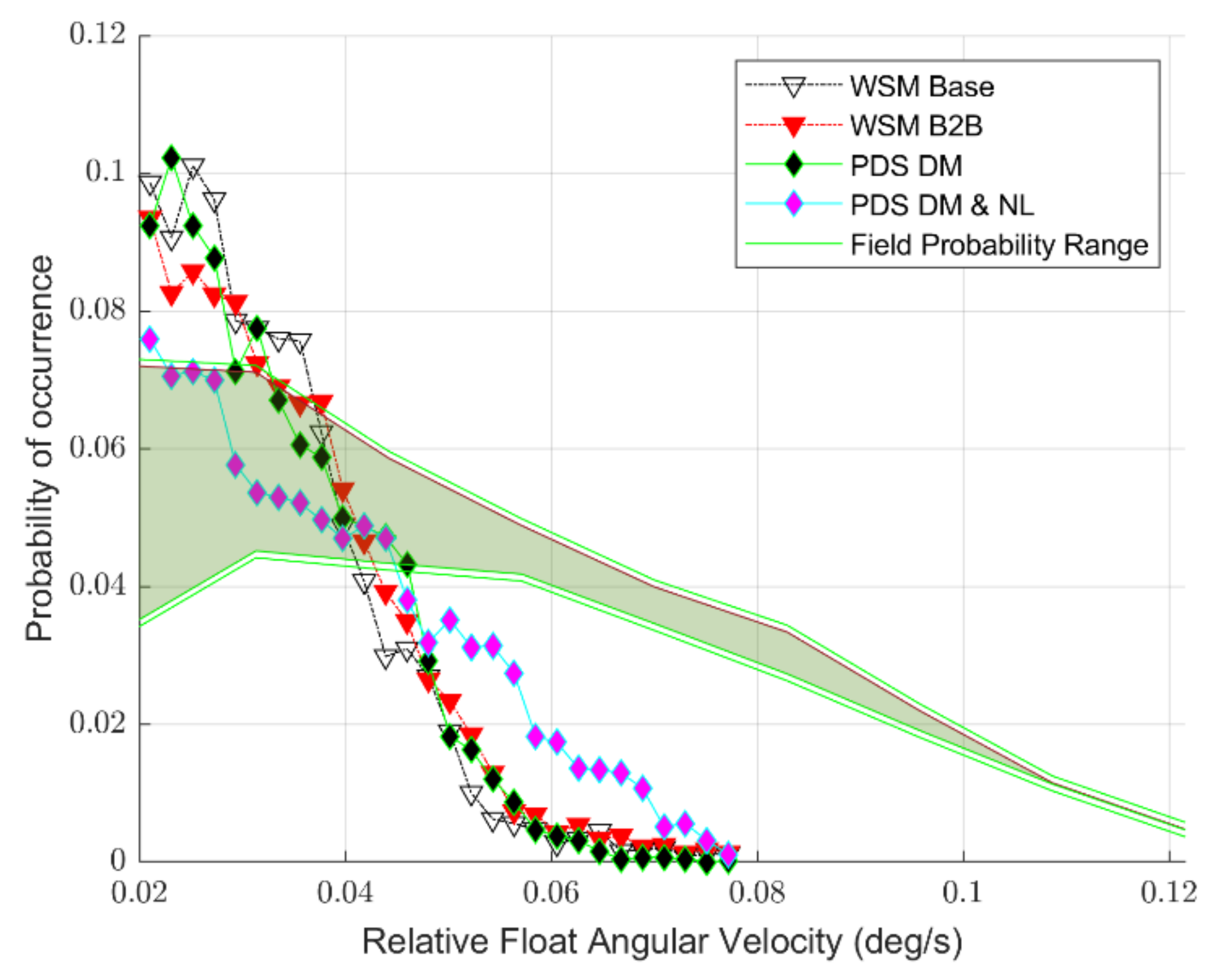
5.2. Code-to-Field Campaign Comparison
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Combourieu, A.; Lawson, M.; Babarit, A.; Ruehl, K.; Roy, A.; Costello, R.; Laporte-Weywada, P.; Bailey, H. WEC3: Wave Energy Converter Code Comparison Project. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC2015), Nantes, France, 6–11 September 2015; pp. 1–10. [Google Scholar]
- Newman, J.N. Marine Hydrodynamics; The MIT Press: Cambridge, UK, 2018. [Google Scholar]
- Wendt, F.; Nielsen, K.; Yu, Y.-H.; Bingham, H.; Eskilsson, C.; Kramer, M.; Babarit, A.; Bunnik, T.; Costello, R.; Crowley, S.; et al. Ocean Energy Systems Wave Energy Modelling Task: Modelling, Verification and Validation of Wave Energy Converters. J. Mar. Sci. Eng. 2019, 7, 379. [Google Scholar] [CrossRef] [Green Version]
- Starrett, M.; So, R.; Brekken, T.K.; McCall, A. Development of a state space model for wave energy conversion systems. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Davidson, J.; Ringwood, J.V. Mathematical Modelling of Mooring Systems for Wave Energy Converters—A Review. Energies 2017, 10, 666. [Google Scholar] [CrossRef] [Green Version]
- Paduano, B.; Giorgi, G.; Gomes, R.P.F.; Pasta, E.; Henriques, J.C.C.; Gato, L.M.C.; Mattiazzo, G. Experimental Validation and Comparison of Numerical Models for the Mooring System of a Floating Wave Energy Converter. J. Mar. Sci. Eng. 2020, 8, 565. [Google Scholar] [CrossRef]
- Zhao, X.; Xue, R.; Geng, J.; Göteman, M. Analytical investigation on the hydrodynamic performance of a multi-pontoon breakwater-WEC system. Ocean Eng. 2021, 220, 108394. [Google Scholar] [CrossRef]
- Pastor, J.; Liu, Y. Frequency and time domain modeling and power output for a heaving point absorber wave energy converter. Int. J. Energy Environ. Eng. 2014, 5, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Bailey, H.; Ortiz, J.P.; Robertson, B.; Buckhamn, B.J.; Nicoll, R.S. A Methodology for Wave-to-Wire WEC Simulations. In Proceedings of the 2nd Marine Energy Technology Symposium, Seattle, WA, USA, 15–18 April 2014; pp. 1–15. Available online: https://vtechworks.lib.vt.edu//handle/10919/49238 (accessed on 22 February 2021).
- Robertson, B.; Bailey, H.; Leary, M.; Buckham, B. A methodology for architecture agnostic and time flexible representations of wave energy converter performance. Appl. Energy 2021, 287, 116588. [Google Scholar] [CrossRef]
- Windt, C.; Davidson, J.; Ringwood, J.V. High-fidelity numerical modelling of ocean wave energy systems: A review of computational fluid dynamics-based numerical wave tanks. Renew. Sustain. Energy Rev. 2018, 93, 610–630. [Google Scholar] [CrossRef] [Green Version]
- Yeylaghi, S.; Beatty, S.; Crawford, C.; Oshkai, P.; Buckham, B.; Moa, B. SPH Modeling of Hydrodynamic Loads on a Point Absorber Wave Energy Converter Hull. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC2015), Nantes, France, 6–11 September 2015; pp. 1–7. [Google Scholar]
- Coe, R.G.; Bull, D.L. Nonlinear time-domain performance model for a wave energy converter in three dimensions. In Proceedings of the 2014 Oceans-St. John’s, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–10. [Google Scholar] [CrossRef]
- Ahamed, R.; McKee, K.; Howard, I. Advancements of wave energy converters based on power take off (PTO) systems: A review. Ocean Eng. 2020, 204, 107248. [Google Scholar] [CrossRef]
- Têtu, A. Power Take-Off Systems for WECs. Handbook of Ocean Wave Energy; Springer: New York, NY, USA, 2016; pp. 203–220. [Google Scholar]
- Morison, J.; Johnson, J.; Schaaf, S. The Force Exerted by Surface Waves on Piles. J. Pet. Technol. 1950, 2, 149–154. [Google Scholar] [CrossRef]
- Bergdahl, L. Mooring Design for WECs. In Handbook of Ocean Wave Energy; Springer: New York, NY, USA, 2016; pp. 159–202. [Google Scholar]
- Lee, J.N.; Newman, C.H. Wamit User Manual; WAMIT, Inc.: Chestnut Hill, MA, USA, 2006; p. 42. [Google Scholar]
- Anderson, E. Application of the Open Source Code Nemoh for Modelling of Added Mass and Damping in Ship Motion Simulations. 2018. Available online: http://urn.kb.se/resolve?urn=urn:nbn:se:kth:diva-239044 (accessed on 27 March 2021).
- Penalba, M.; Giorgi, G.; Ringwood, J.V. Mathematical modelling of wave energy converters: A review of nonlinear approaches. Renew. Sustain. Energy Rev. 2017, 78, 1188–1207. [Google Scholar] [CrossRef] [Green Version]
- Davidson, J.; Costello, R. Efficient Nonlinear Hydrodynamic Models for Wave Energy Converter Design—A Scoping Study. J. Mar. Sci. Eng. 2020, 8, 35. [Google Scholar] [CrossRef] [Green Version]
- Michele, S.; Sammarco, P.; D’Errico, M. Weakly nonlinear theory for oscillating wave surge converters in a channel. J. Fluid Mech. 2017, 834, 55–91. [Google Scholar] [CrossRef] [Green Version]
- Penalba-Retes, M.; Mérigaud, A.; Gilloteaux, J.C.; Ringwood, J. Nonlinear Froude-Krylov force modelling for two heaving wave energy point absorbers. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC2015), Nantes, France, 6–11 September 2015; pp. 1–10. [Google Scholar]
- Wheeler, J. Method for Calculating Forces Produced by Irregular Waves. J. Pet. Technol. 1970, 22, 359–367. [Google Scholar] [CrossRef]
- Lo, J.-M.; Dean, R.G. Evaluation of a Modified Stretched Linear Wave Theory. In Coastal Engineering; ACSE: Reston, VA, USA, 1986; pp. 522–536. [Google Scholar]
- Tom, N.; Lawson, M.; Yu, Y.-H. Demonstration of the Recent Additions in Modeling Capabilities for the WEC-Sim Wave Energy Converter Design Tool. American Society of Mechanical Engineers Digital Collection. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, St. John’s, NL, Canada, 31 May–5 June 2015; ASME International: St. John’s, NL, Canada, 2015; Volume 9, pp. 1–11. [Google Scholar]
- Starrett, M.; So, R.; Brekken, T.K.; McCall, A. Increasing power capture from multibody wave energy conversion systems using model predictive control. In Proceedings of the 2015 IEEE Conference on Technologies for Sustainability (SusTech), Ogden, UT, USA, 30 July–1 August 2015; pp. 20–26. [Google Scholar] [CrossRef]
- Sigrist, J.-F. Fluid-Structure Interaction: An Introduction to Finite Element Coupling; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Buckham, B.J. Dynamics Modelling of Low-Tension Tethers for Submerged Remotely Operated Vehicles. Ph.D. Thesis, University of Victoria, Victoria, Canada, 2003. [Google Scholar]
- Walton, T.S.; Polachek, H. Calculation of Transient Motion of Submerged Cables. Math. Comput. 1960, 14, 27–46. [Google Scholar] [CrossRef]
- Reid, R.O. Dynamics of Deep-Sea Mooring Lines; Department of Oceanography; Texas A and M University: College Station, TX, USA, 1968. [Google Scholar]
- Hicks, J.B.; Clark, L.G. On the Dynamic Response of Buoy-Supported Cables and Pipes to Currents and Waves. All Days 1972, 30. [Google Scholar] [CrossRef]
- Hall, M.; Goupee, A. Validation of a lumped-mass mooring line model with DeepCwind semisubmersible model test data. Ocean Eng. 2015, 104, 590–603. [Google Scholar] [CrossRef] [Green Version]
- Huang, S. Dynamic analysis of three-dimensional marine cables. Ocean Eng. 1994, 21, 587–605. [Google Scholar] [CrossRef]
- Triantafyllou, M.; Howell, C. Dynamic Response of Cables Under Negative Tension: An Ill-Posed Problem. J. Sound Vib. 1994, 173, 433–447. [Google Scholar] [CrossRef]
- Ferri, F.; Palm, J. Implementation of a Dynamic Mooring Solver (MOODY) into a Wave to Wire Model of a Simple WEC; Department of Civil Engineering; Aalborg University: Aalborg, Denmark, 2015. [Google Scholar]
- Triantafyllou, M.S.; Howell, C.T. Nonlinear Impulsive Motions of Low Tension Cables. J. Eng. Mech. 1992, 118, 807–830. [Google Scholar] [CrossRef]
- Buckham, B.; Driscoll, F.R.; Nahon, M. Development of a Finite Element Cable Model for Use in Low-Tension Dynamics Simulation. J. Appl. Mech. 2004, 71, 476–485. [Google Scholar] [CrossRef]
- DSA, L. Dynamic Systems Analysis, ProteusDS Manual. 2015. Available online: http://http://downloads.dsa-ltd.ca/documentation/ProteusDS%202015%20Manual.pdf (accessed on 12 July 2020).
- WEC-Sim. Version 4.2. 2014. Available online: http://en.openei.org/wiki/WECSim (accessed on 27 March 2021).
- Systèmes, D.; Corporation, S.; Street, W. SOLIDWORKS Mold Design Using SOLIDWORKS. 1995. Dassault Systèmes Solidworks Corportation, Waltham, MA, USA. Available online: https://www.solidworks.com/ (accessed on 1 July 2020).
- McNeel, R. Rhinoceros User Guide. 2020. Available online: http://docs.mcneel.com/rhino/6/usersguide/en-us/index.htm (accessed on 15 March 2021).
- McTaggart, K. ShipMo3D Version 3.0 User Manual for Computing Ship Motions in the Time and Frequency Domains; DRDC Atlantic TM 2011-308; Atlantic Research Centre: Dartmouth, NS, Canada, 2011. [Google Scholar]
- Babarit, A.; Delhommeau, G. Theoretical and numerical aspects of the open source BEM solver NEMOH. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC2015), Nantes, France, 6–11 September 2015; pp. 1–12. [Google Scholar]
- DSA, L. Dynamic Systems Analysis, ProteusDS API Manual. 2017. Available online: http://downloads.dsa-ltd.ca/documentation/ProteusDS_API_Manual.pdf (accessed on 22 February 2021).
- Hall, M. “MoorDyn User’ s Guide,” Manual. 2017. Available online: http://www.matt-hall.ca/files/MoorDyn-Users-Guide-2017-08-16.pdf (accessed on 15 March 2021).
- Rusch, C.J. Wave Energy Buoy the Self-Deploys; Pacific Marine Energy Center: Seattle, WA, USA, 2021; pp. 1–23. Available online: https://www.pmec.us/technical-reports (accessed on 22 April 2021).
- Thomson, J. Wave Breaking Dissipation Observed with “SWIFT” Drifters. J. Atmos. Ocean. Technol. 2012, 29, 1866–1882. [Google Scholar] [CrossRef]
- Korde, U.A.; Robinett, R.D.; Wilson, D.G.; Bacelli, G.; Abdelkhalik, O.O. Wave-by-Wave Control of a Wave Energy Converter with Deterministic Wave Prediction. In Proceedings of the European Wave and Tidal Energy Conference (EWTEC2017), Cork, Ireland, 27 August–1 September 2017; pp. 1–10. [Google Scholar]
- Fisher, A.; Thomson, J.; Schwendeman, M. Rapid deterministic wave prediction using a sparse array of buoys. Ocean Eng. 2021, 228, 108871. [Google Scholar] [CrossRef]
- Davis, A.F.; Thomson, J.; Mundon, T.R.; Fabien, B.C. Modeling and Analysis of a Multi Degree of Freedom Point Absorber Wave Energy Converter. In Proceedings of the 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; pp. 1–10. [Google Scholar] [CrossRef] [Green Version]
- Whitmer, A.R.; Klamo, J.T.; Kwon, Y.W. On the Validity of Predicting Wave-induced Loads on a Submerged Body Using the Superposition of Regular Wave Results. In Proceedings of the Oceans 2019 MTS/IEEE Seattle, Seattle, WA, USA, 27–31 October 2019. [Google Scholar] [CrossRef]
- Rusch, C.J.; Mundon, T.R.; Maurer, B.D.; Polagye, B.L. Hydrodynamics of an asymmetric heave plate for a point absorber wave energy converter. Ocean Eng. 2020, 215, 107915. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rigid Body | CDx | CDy | CDz |
|---|---|---|---|
| Aft Float | 1 | 1.9 | 1 |
| Fore Float | 1 | 1.9 | 1 |
| Nacelle | 1 | 1 | 1 |
| Heave Plate | 1.4 | 1.4 | 4.5 |
| Modelling Scenario | Theory | ||
|---|---|---|---|
| Weakly Nonlinear (NL) | Body-to-Body Interactions (B2B) | Dynamic Cables (DM) | |
| WSM Base | |||
| WSM NL | X | ||
| WSM B2B | X | ||
| WSM B2B and NL | X | X | |
| PDS DM | X | ||
| PDS DM and NL | X | X | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leary, M.; Rusch, C.; Zhang, Z.; Robertson, B. Comparison and Validation of Hydrodynamic Theories for Wave Energy Converter Modelling. Energies 2021, 14, 3959. https://doi.org/10.3390/en14133959
Leary M, Rusch C, Zhang Z, Robertson B. Comparison and Validation of Hydrodynamic Theories for Wave Energy Converter Modelling. Energies. 2021; 14(13):3959. https://doi.org/10.3390/en14133959
Chicago/Turabian StyleLeary, Matthew, Curtis Rusch, Zhe Zhang, and Bryson Robertson. 2021. "Comparison and Validation of Hydrodynamic Theories for Wave Energy Converter Modelling" Energies 14, no. 13: 3959. https://doi.org/10.3390/en14133959
APA StyleLeary, M., Rusch, C., Zhang, Z., & Robertson, B. (2021). Comparison and Validation of Hydrodynamic Theories for Wave Energy Converter Modelling. Energies, 14(13), 3959. https://doi.org/10.3390/en14133959