
Power Quality Improvement in Distribution Grids via Real-Time Smart Exploitation of Electric Vehicles

 ,
,  ,
,  ,
,  ,
, 
Abstract
1. Introduction
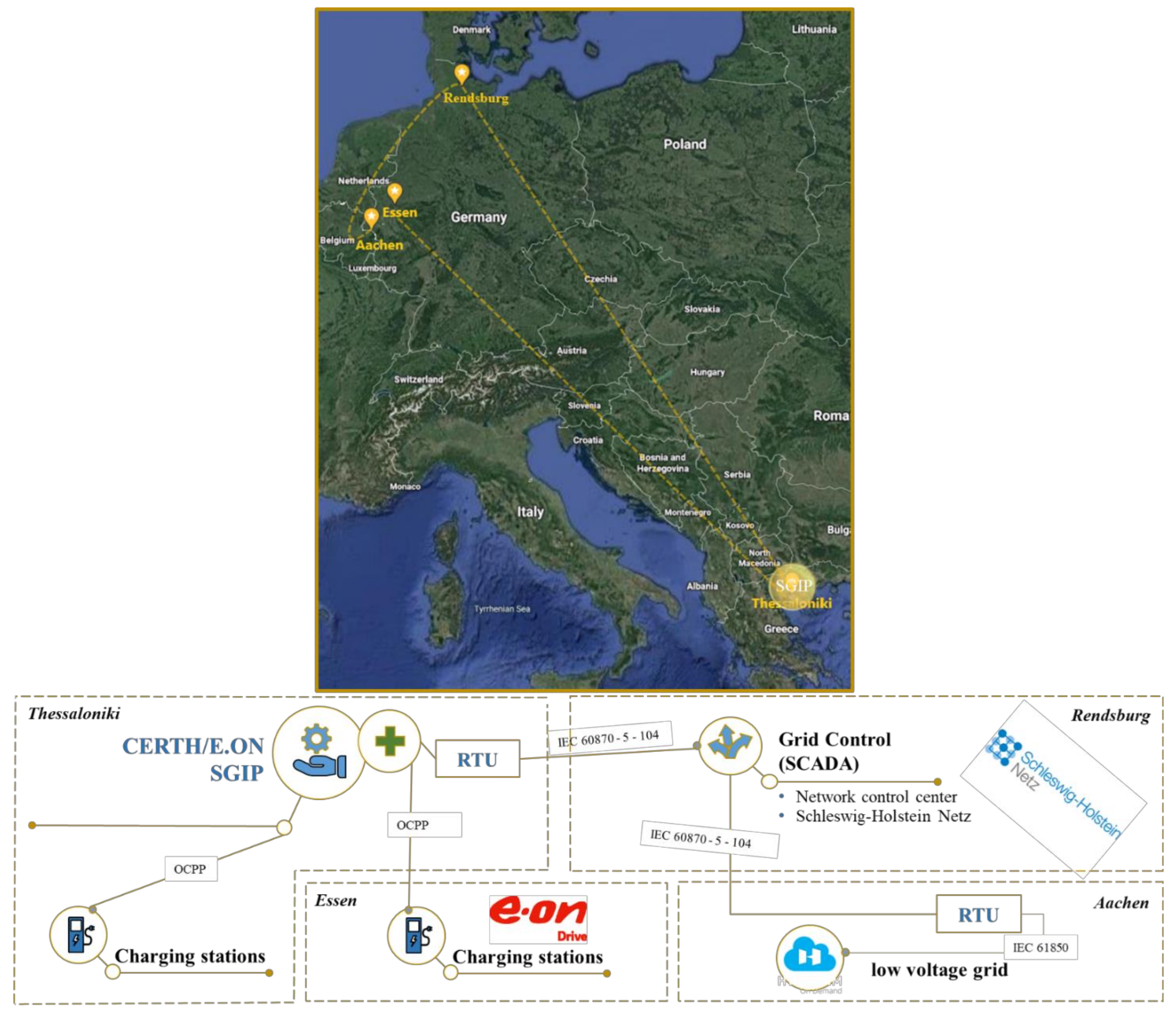
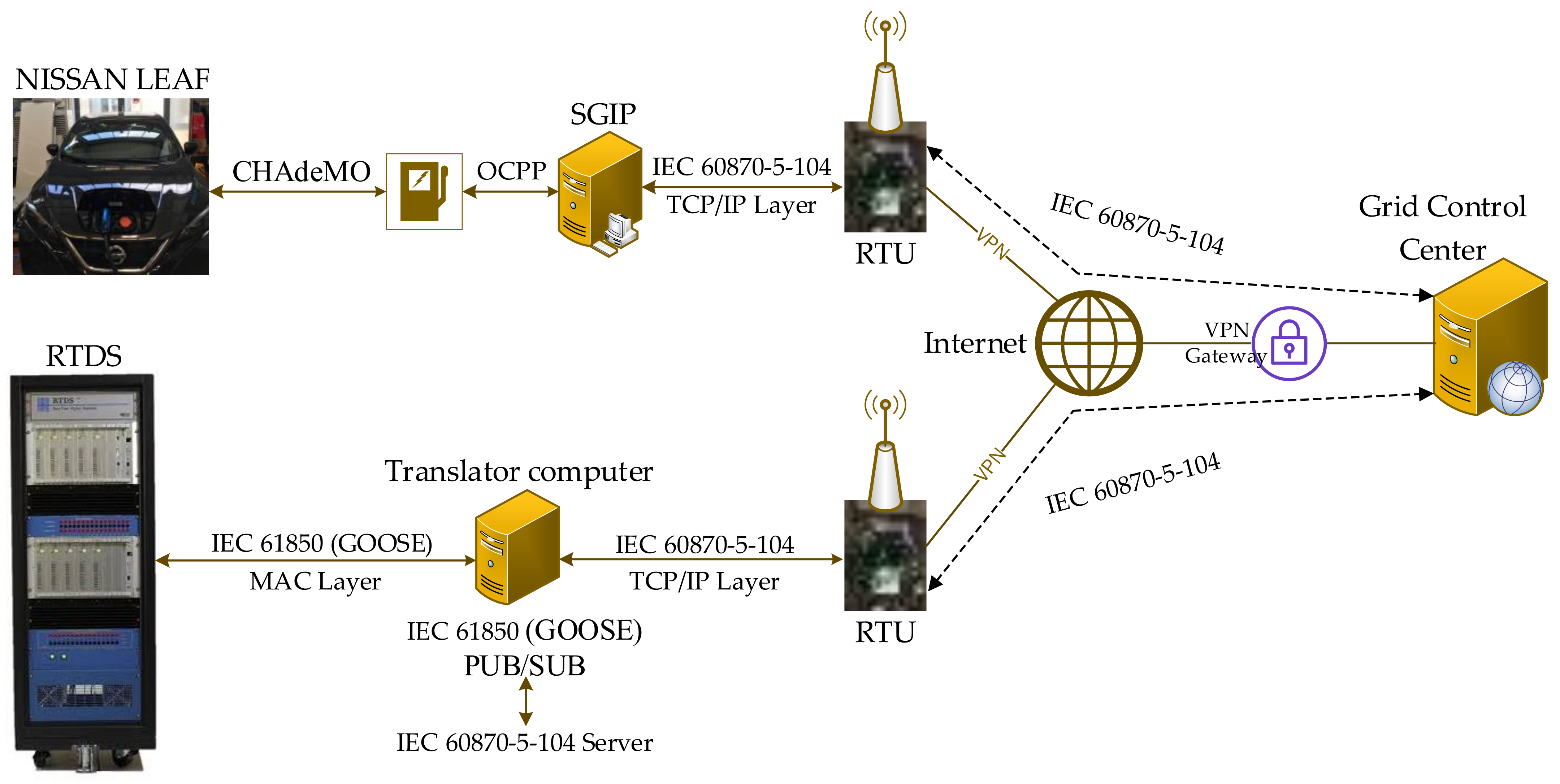
- to describe the implemented ICT system based on different communication protocols (IEC 61850, IEC 60870-5-104 and OCPP). The proposed ICT system transmits data among the field (active distribution system including EV resources), the control center and SGIPs geographically dispersed across Europe (i.e., Aachen, Essen, Rendsburg in Germany and Thessaloniki in Greece).
- to evaluate of the flexibility of the EV systems (in terms of voltage support, harmonic alleviation, RES reverse power flow and reactive power management) on the safe operation of the active distribution systems.
2. MEISTER Project Scope and ICT Platform
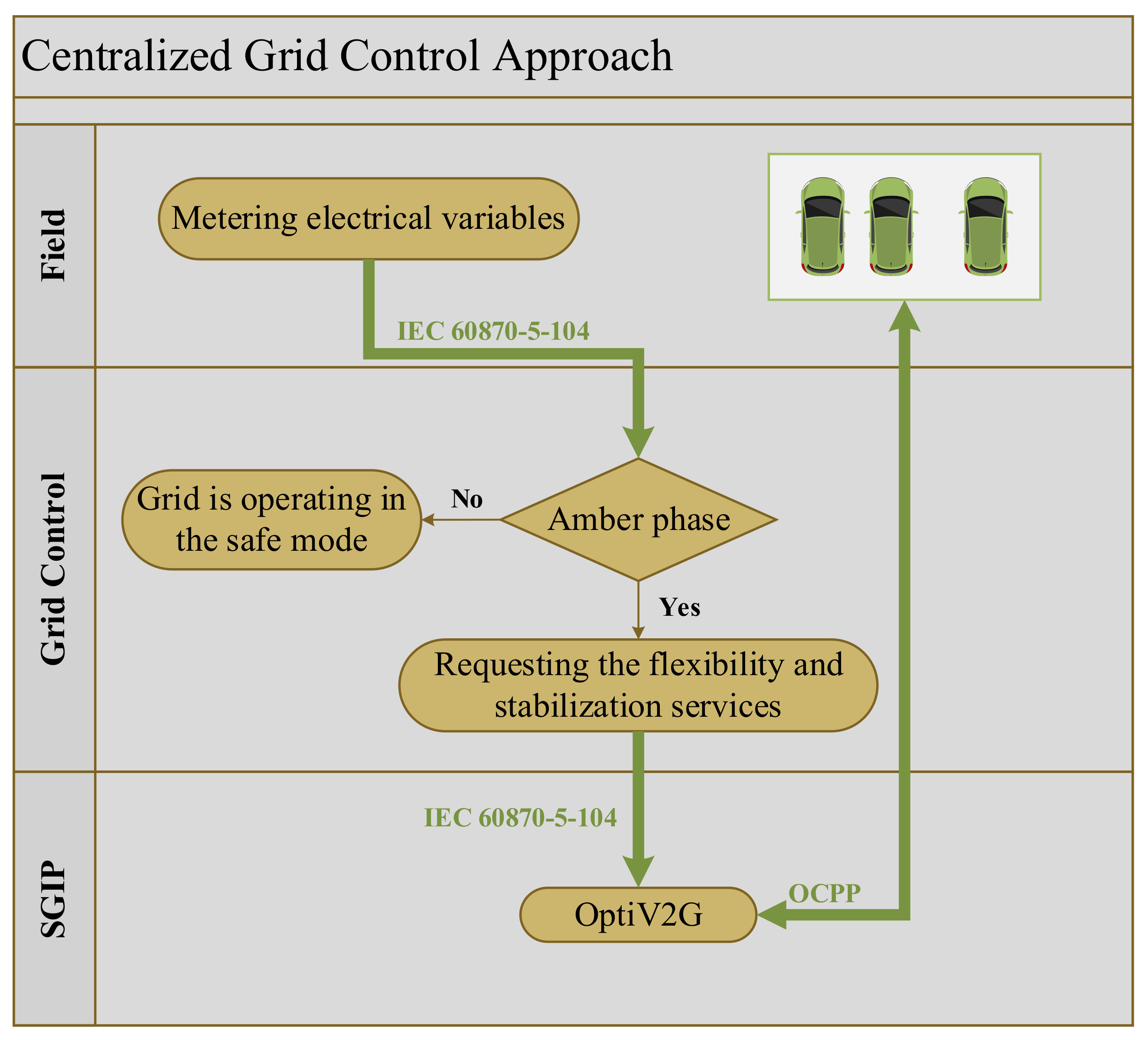
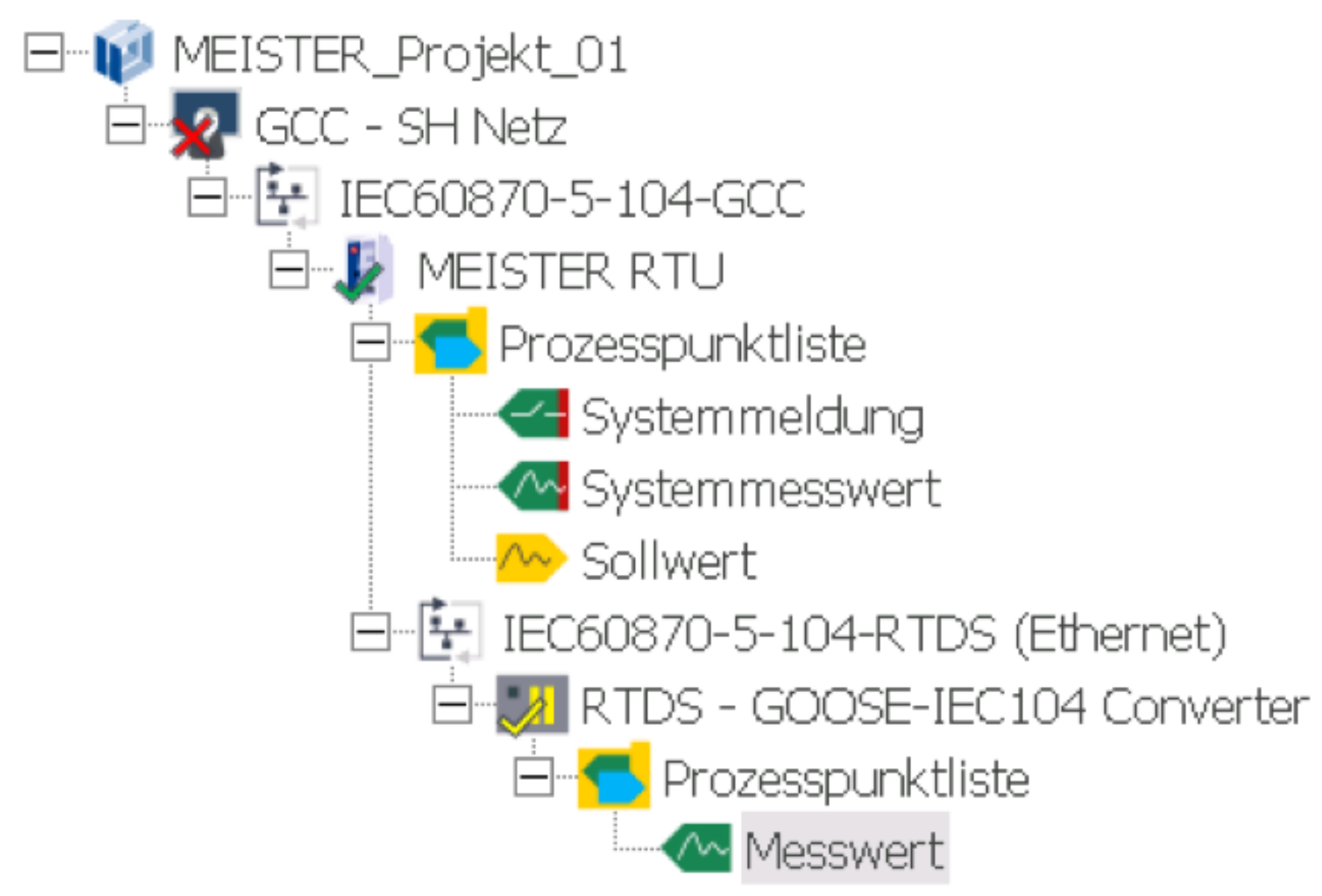
- Transmitting the measured electrical variables from RTDS in the E.ON ERC LAB site located in Aachen to the grid control center of Schleswig Holstein Netze AG (SHN, located in Rendsburg) where the system amber phase is evaluated.
- The utilized communication protocols: IEC 61850 and IEC 60870-5-104.
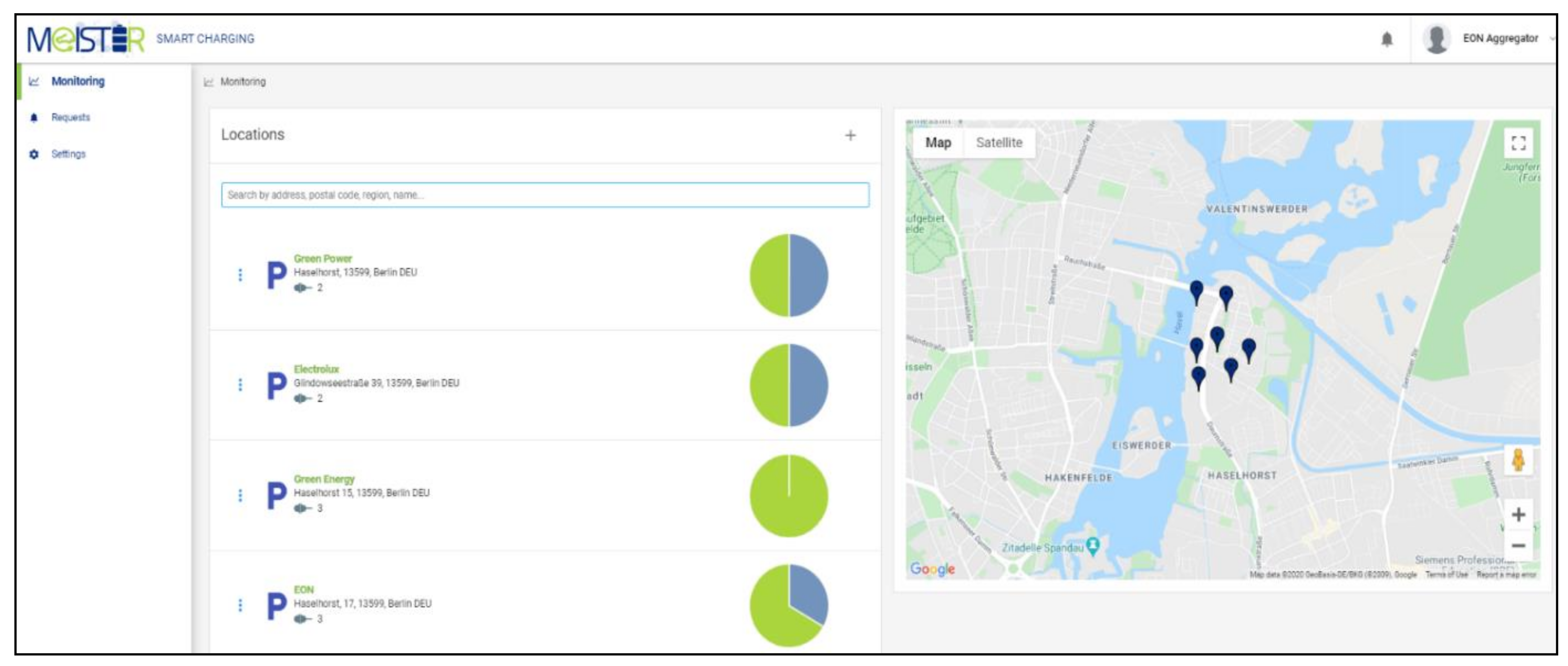
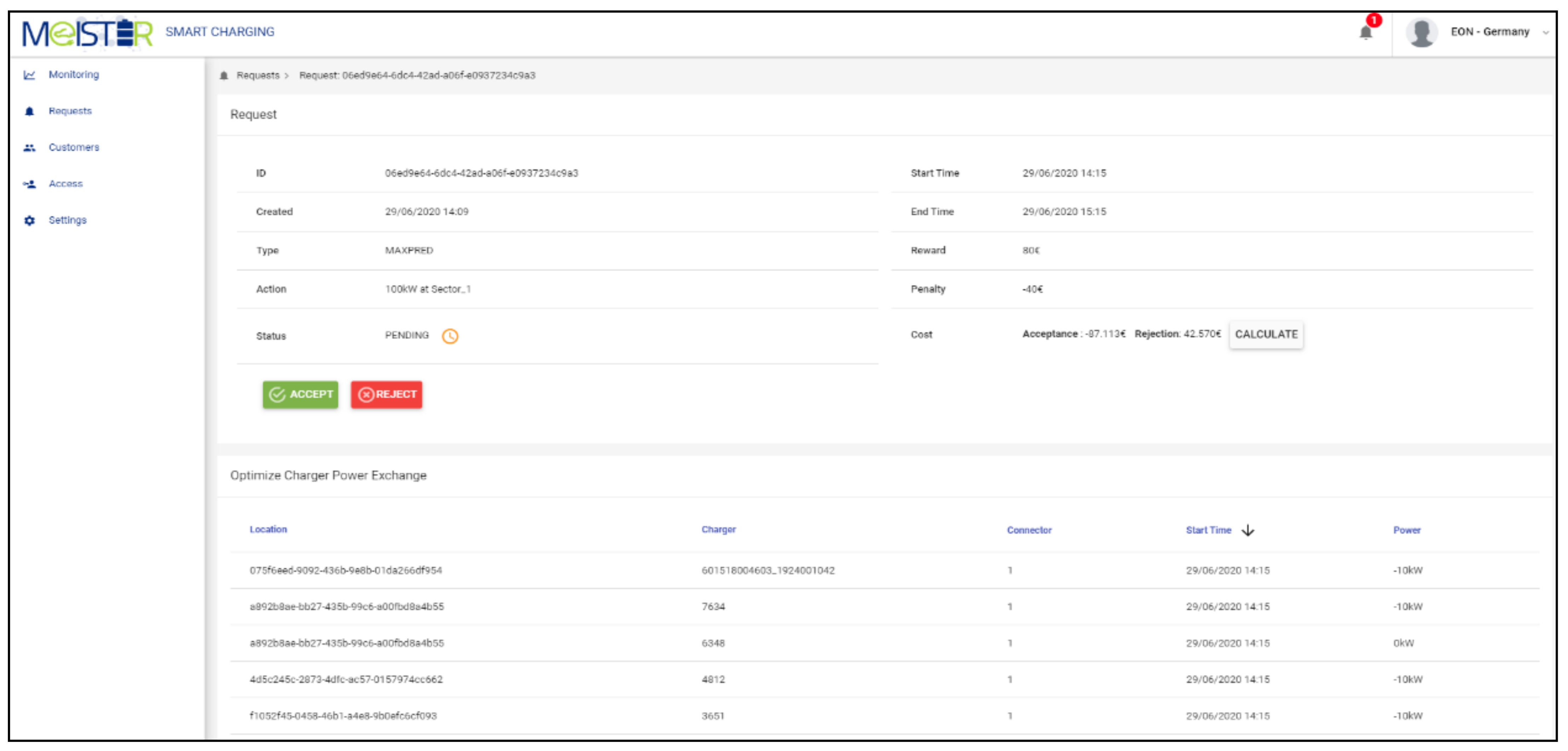
- Transmitting the grid flexibility requests from the grid control center of Schleswig Holstein Netze AG (SHN) to the smart grid integration platform (SGIP) (located in Thessaloniki) from where the operation of the EVs is managed.
- The utilized communication protocol: IEC 60870-5-104.
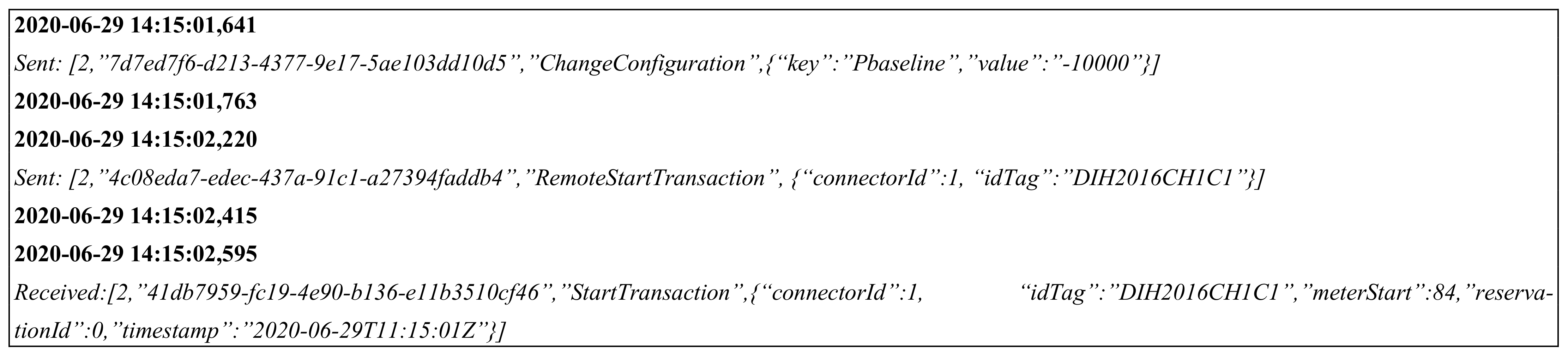
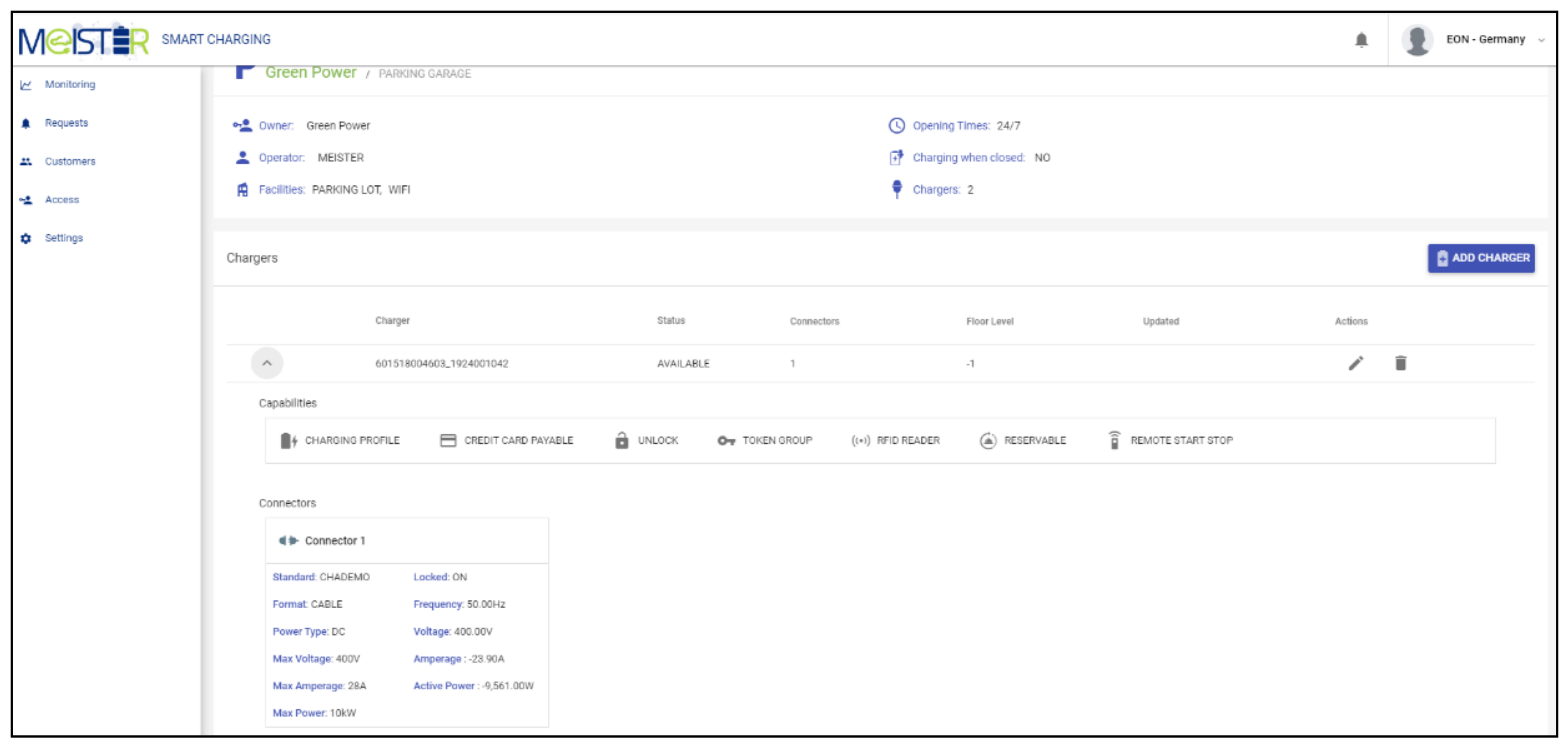
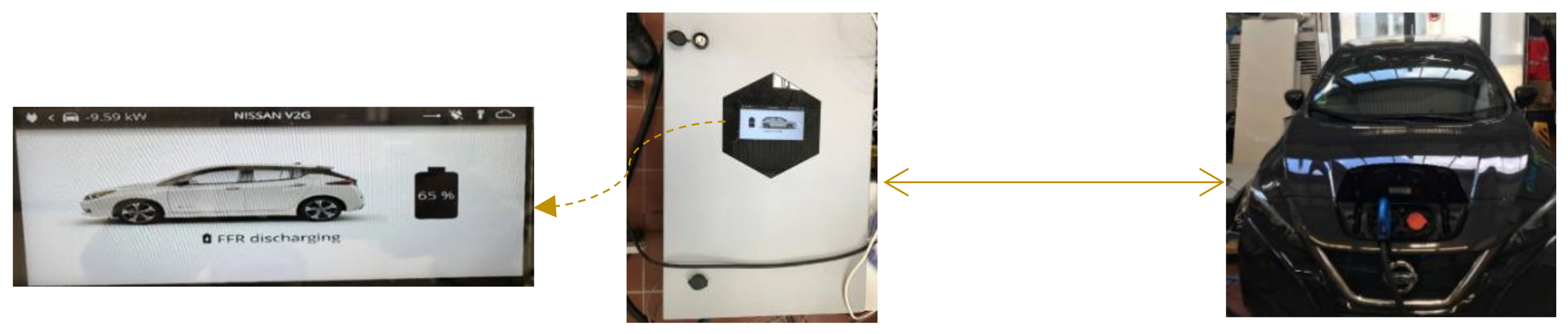
- Transmitting the charging and discharging control signals from the SGIP to the EV chargers located in E.ON Essen (Germany) and in CERTH in Thessaloniki (Greece).
- The utilized communication protocol: OCPP 1.6.
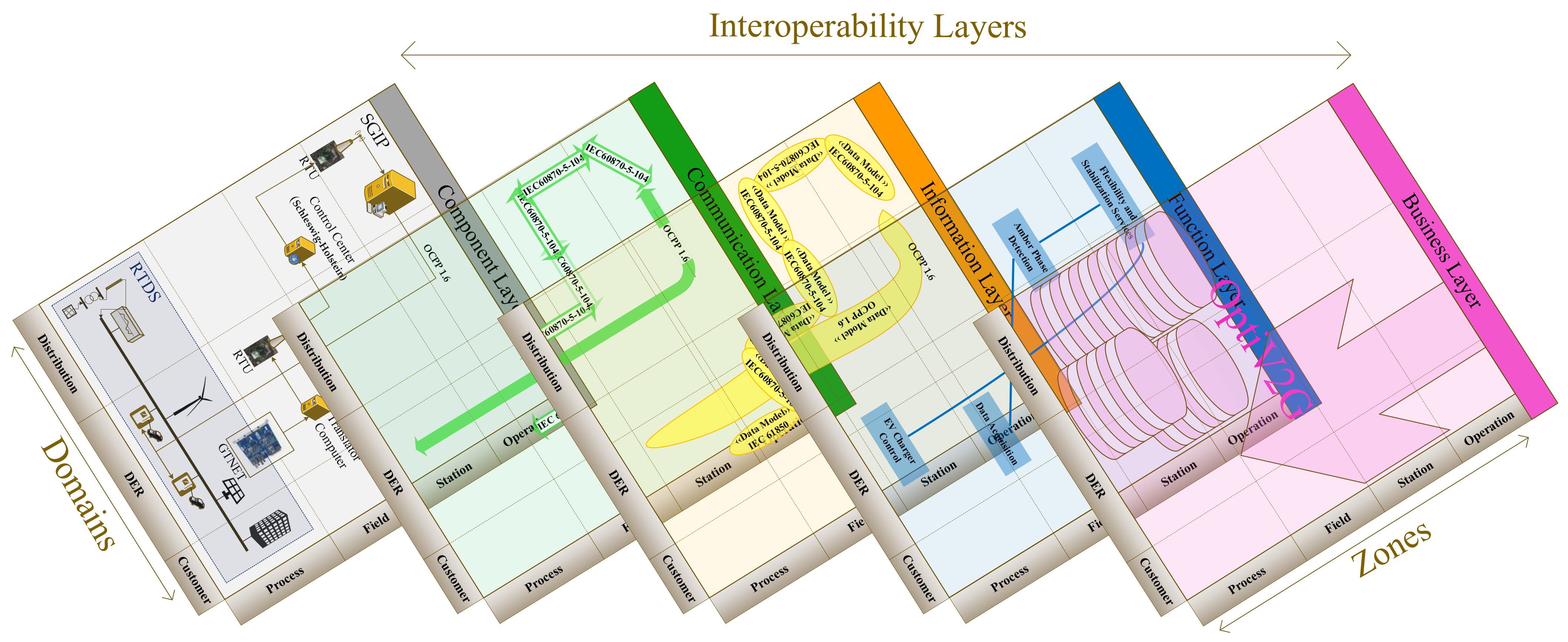
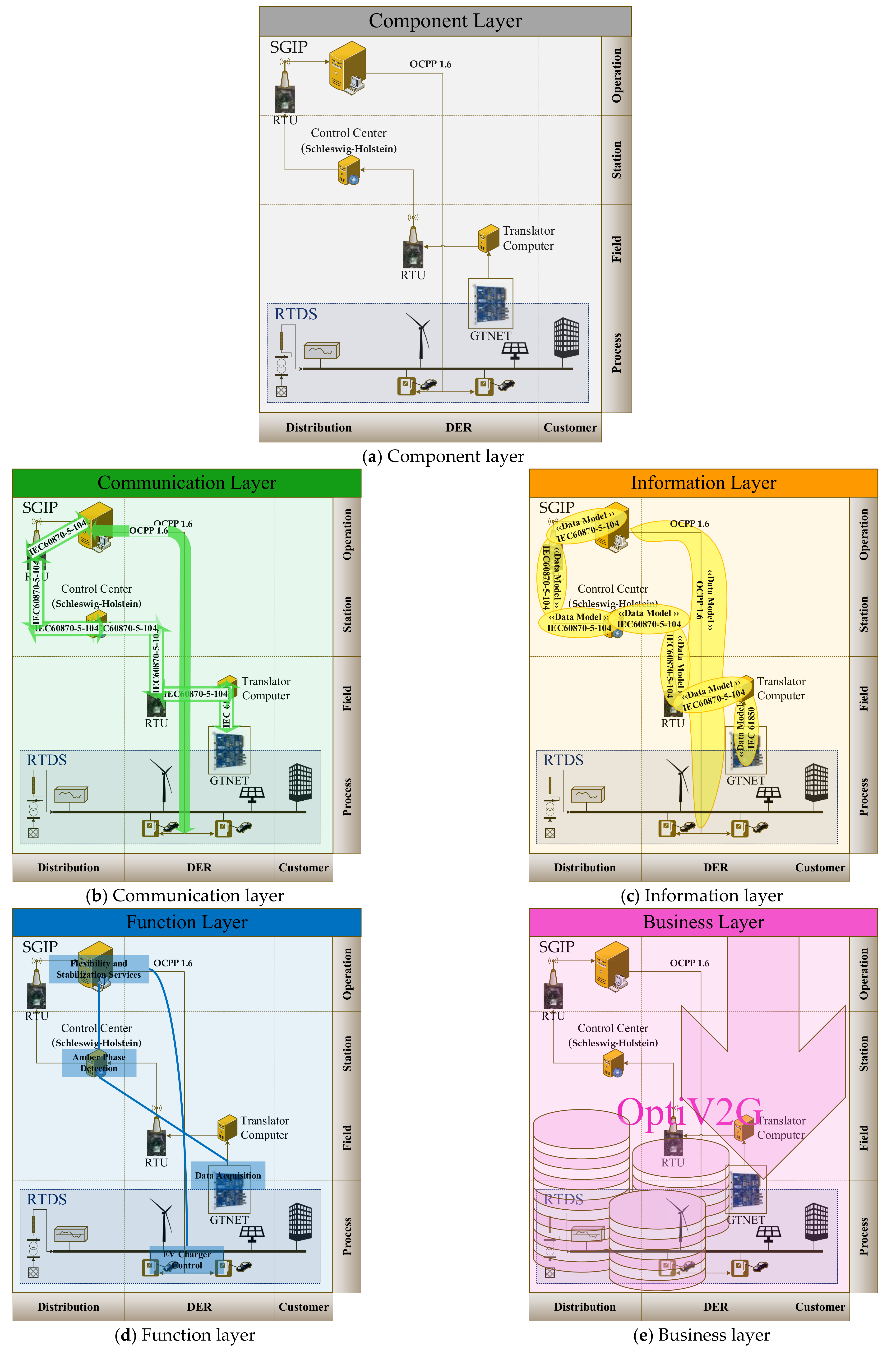
- Component Layer: the focus of this layer is on the available physical components which are exploited in operation of a smart grid. This includes system actors, applications, power system equipment (typically located at process and field levels), protection and telecontrol devices, network infrastructure (wired/wireless communication connections, routers, switches, servers) and any kind of computers. The real-time simulation component architecture involves all the zones from process to operation levels. The domain of the tests is confined to the distribution system in this work. Figure 4a shows that this layer was built under the framework of the MEISTER project.
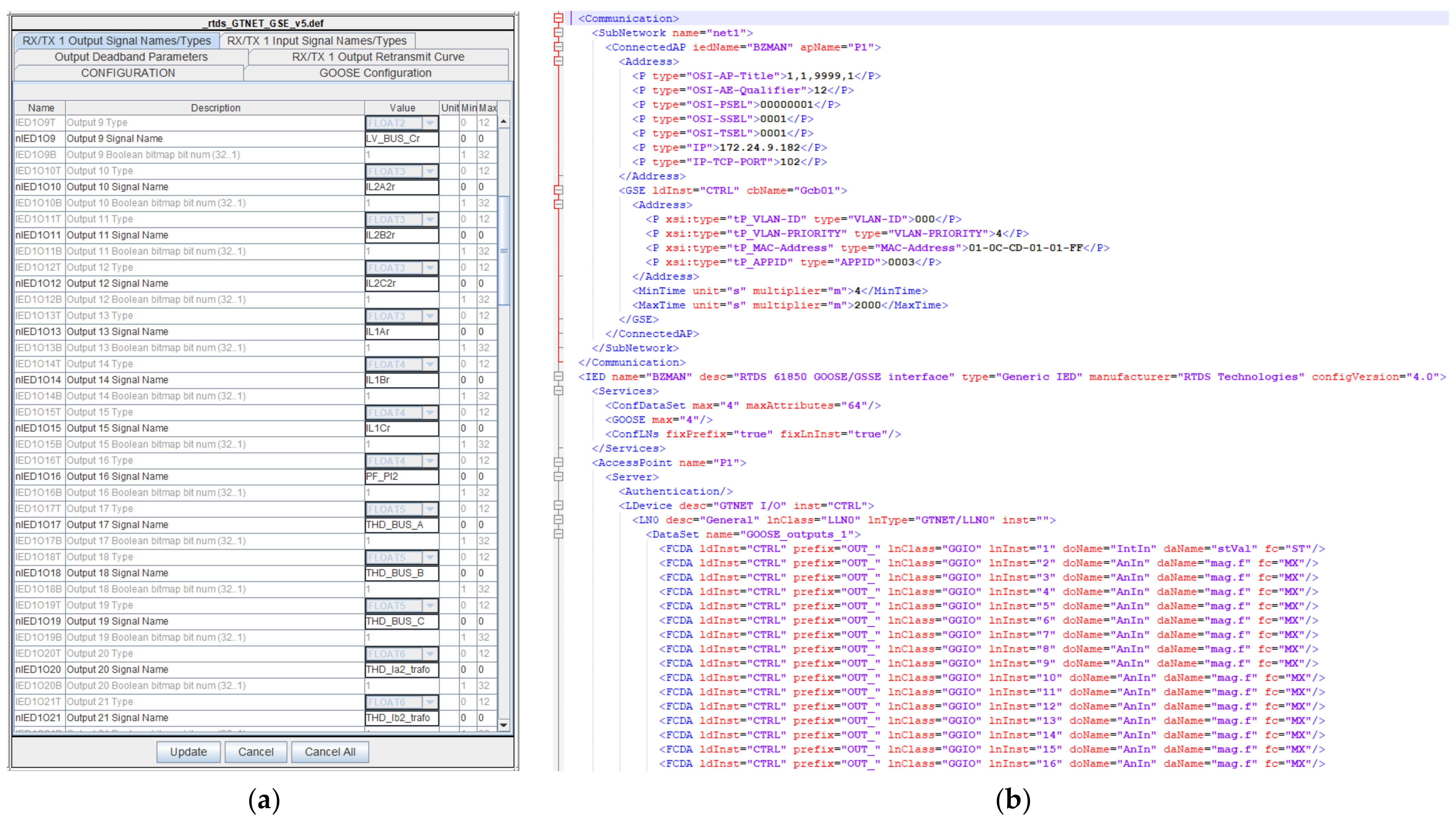
- Communication layer: the emphasis of the communication layer is to describe protocols and mechanisms for the interoperable exchange of information between components in the context of the underlying use case, function or service and the related information objects or the data models. Under the framework of the MEISTER project, the communication protocols, IEC 61850, IEC 60870-5-104 and OCPP, were utilized (as shown in Figure 4b). Section 2.1 describes this layer in more detail.
- Information layer: the required information (objects and the canonical data models) to be used and exchanged among functions, services and components are described in this layer. This information represents the common semantics for functions and services in order to allow an interoperable information exchange via communication means. As shown in Figure 4c, the standards considered to be used for data exchange are IEC 61850, IEC 60870-5-104 and OCPP in this work.
- Function layer: the function layer (Figure 4d) shows the functions and services which are needed to be considered in operation of a smart grid with respect to the domains and the zones of the SGAM diagram. Upon detecting abnormal grid conditions, the SGIP provides the system operator with flexibility measures which can be considered as different use cases in the operation of the smart grid. Each use case contains some function and the sub-functions. In this paper, four different use cases (high load reduction, local RES consumption, filtering of harmonics and reactive power injection) are studied in details in the Results section (Section 5).
2.1. Test Sites and the Communication Interface
- E.ON Research Centre, RWTH Aachen (ERC)
- b.
- Schleswig Holstein Netze AG (SHN)
- c.
- CERTH/ ITI Hellas
- d.
- E.ON Essen
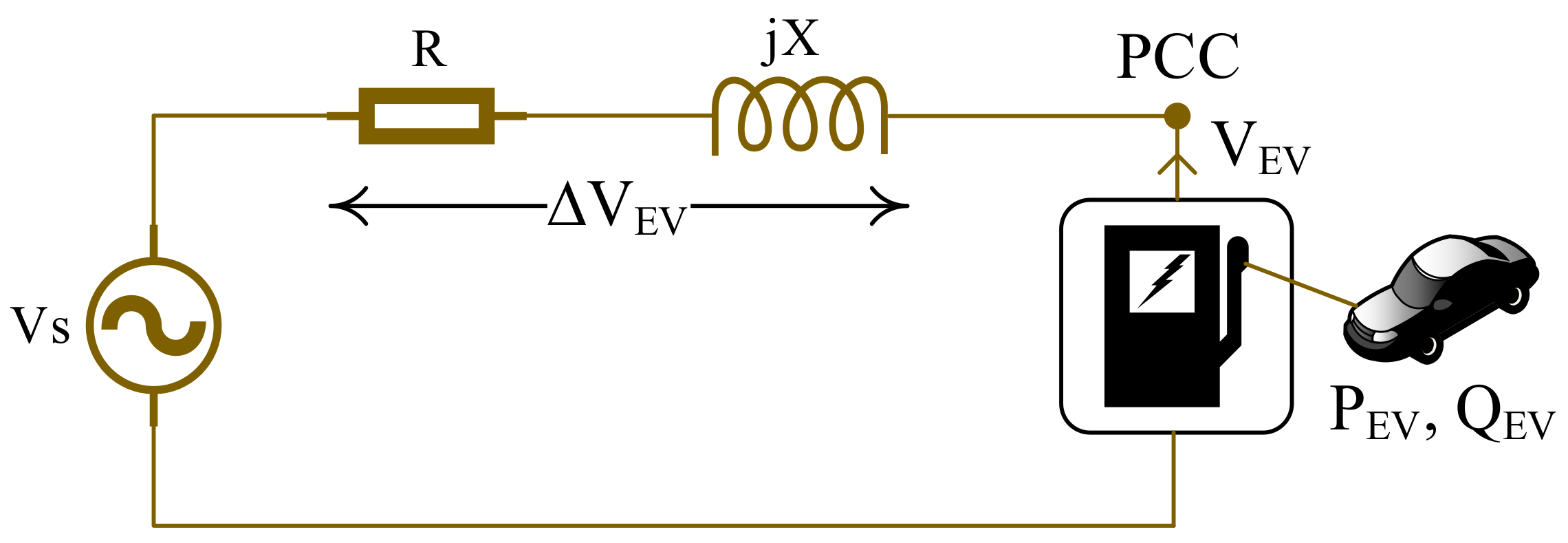
3. Power Quality Management via EV Chargers
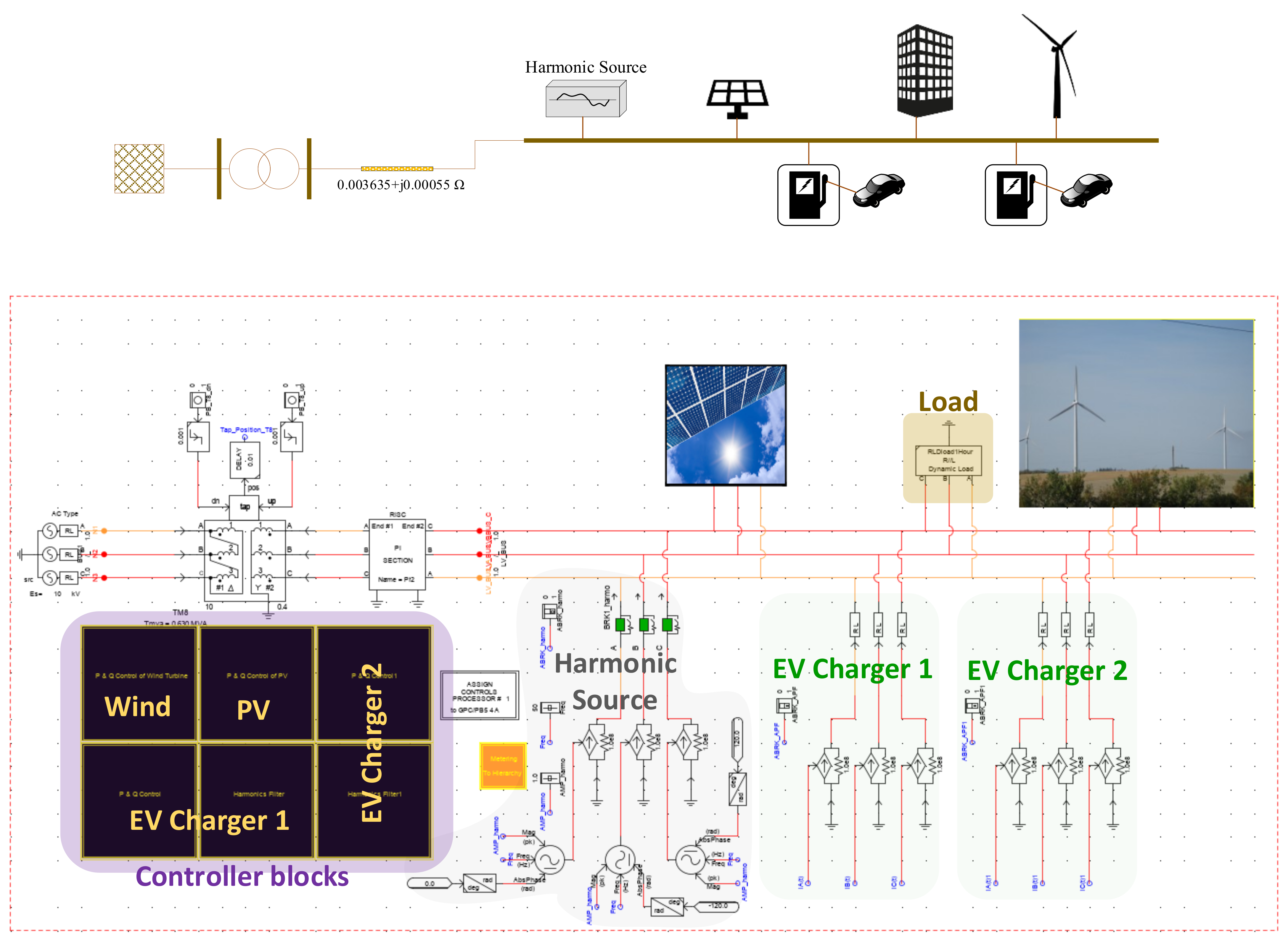
4. EV Charging Station and Grid Modelling
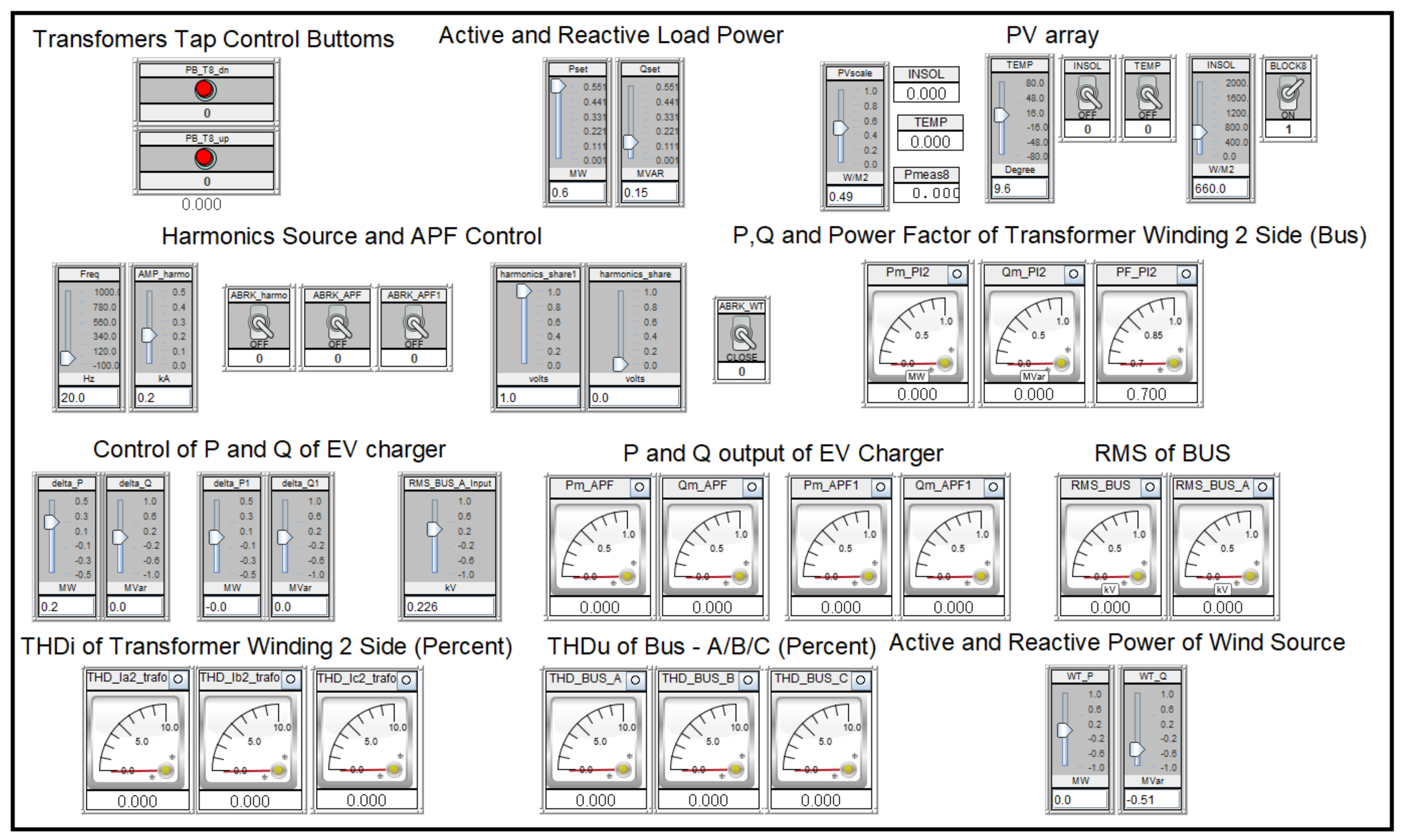
- Transformer tap control: through the “up” and “down” button, the tap of the transformer can be adjusted accordingly.
- Active and reactive load power: setting of the active and power consumption of the load.
- PV array: switching on/off of the PV device. The control input values of the PV array are the temperature and the radiation, which are regulated separately.
- Harmonics source and APF control: the three switches correspond to the harmonics source, and the filtering function of two EV chargers. The amplitude and frequency of the harmonic current injected by the harmonics source are controlled by the two sliders to the left. The contribution factors between 0 and 1 of the two EV chargers in the harmonics filtering are controlled by the two sliders to the right.
- Control of P and Q of the wind turbine: the output active and reactive power of the wind turbine are regulated separately.
- Control of P and Q of EV charger: the output active and reactive power of the EV chargers are regulated separately.
- Active and reactive power generation: the currents (I_P) and (I_Q), which are components in the EV output currents to meet the demands of active and reactive power from EV the charger, are calculated separately based on the values of required active and reactive power, and the rated system voltage level.
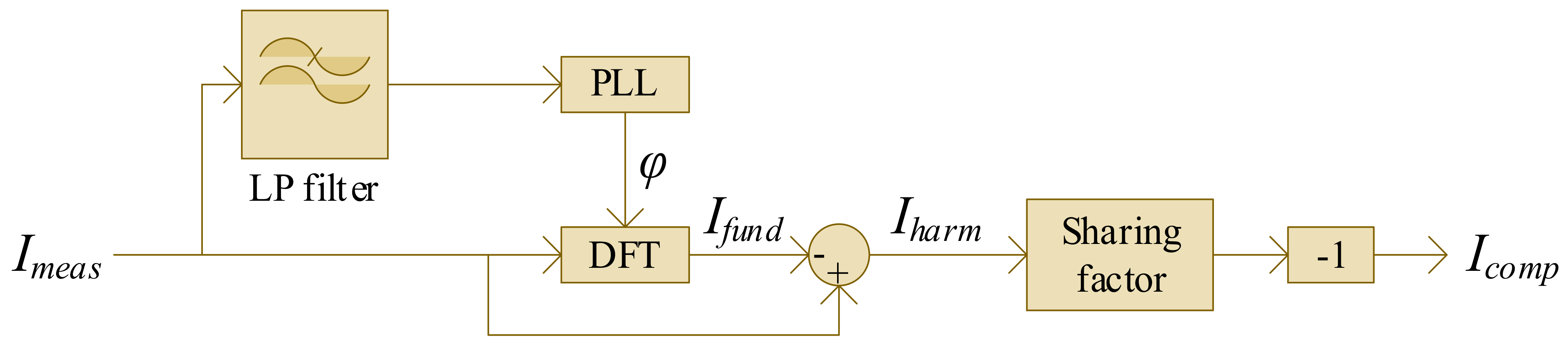
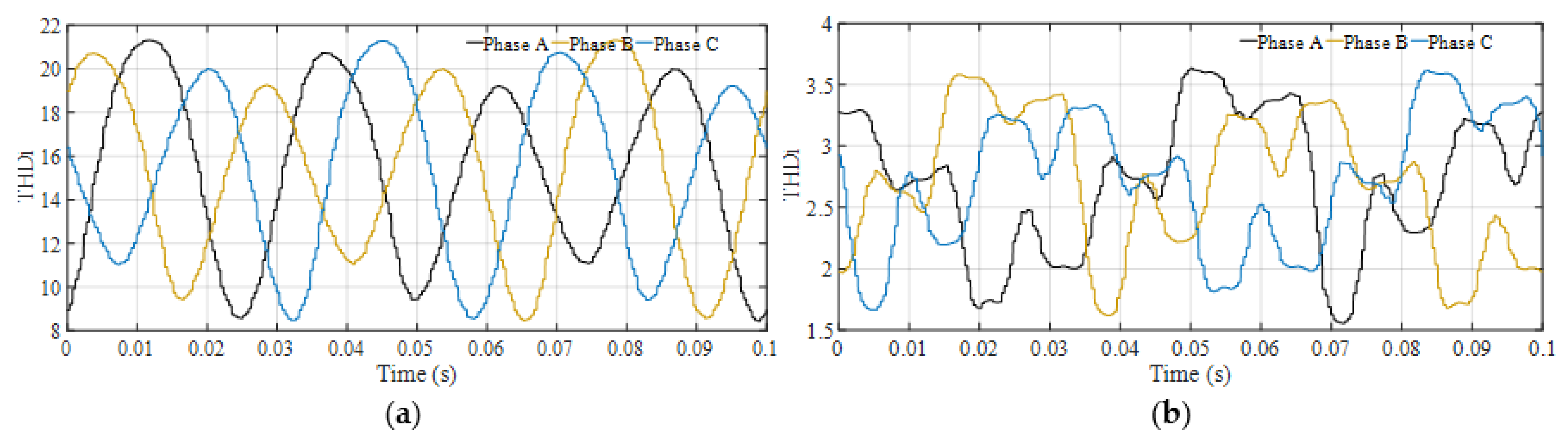
- Harmonics filtering: Through eliminating the fundamental-frequency component in the currents measured at the branch of the harmonics source with discrete Fourier transform (DFT), the three-phase harmonics currents that are injected by the harmonics source into the system are estimated. Based on these values, the filtering current (I_filter) is calculated with consideration of a contribution ratio between the two EV chargers. Finally, all the three target values of currents, (I_P), (I_Q) and (I_filter), are summed to obtain the control input of each phase of the equivalent current sources of EV chargers.
5. Results
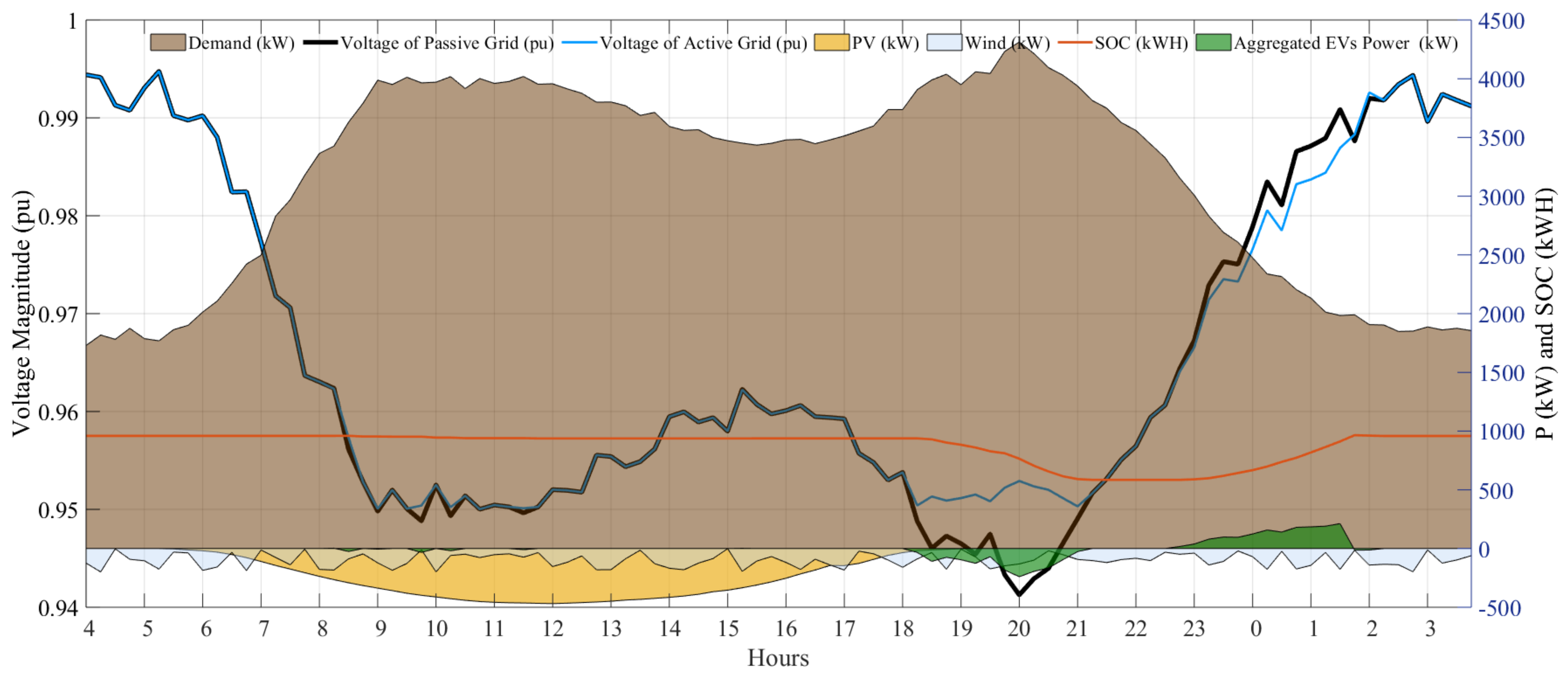
- Use Case 1: High Load Reduction
- Use Case 2: Local RES Consumption
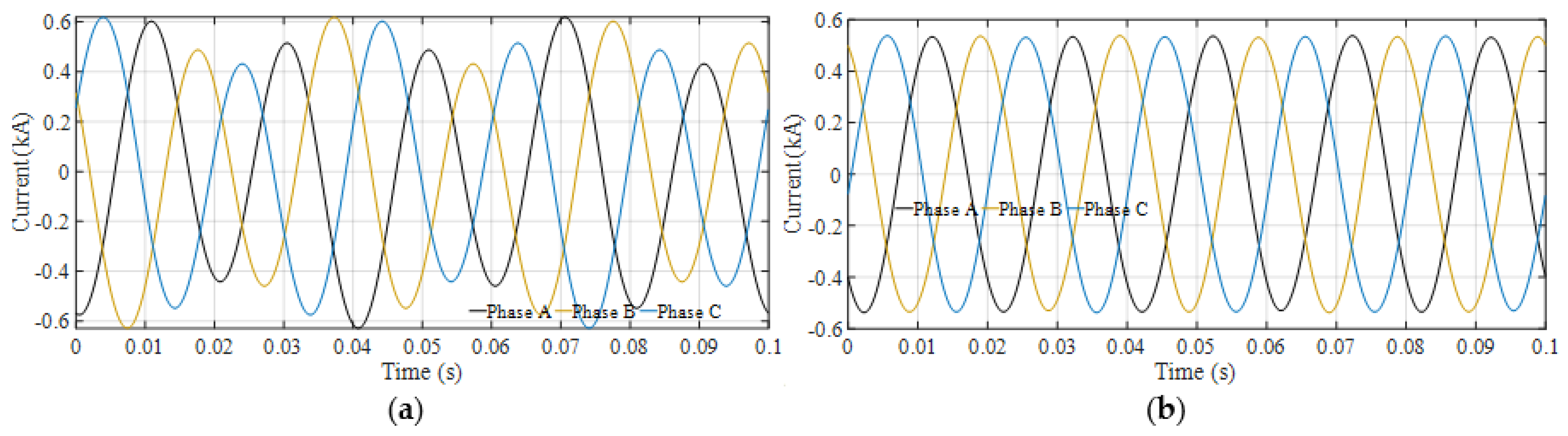
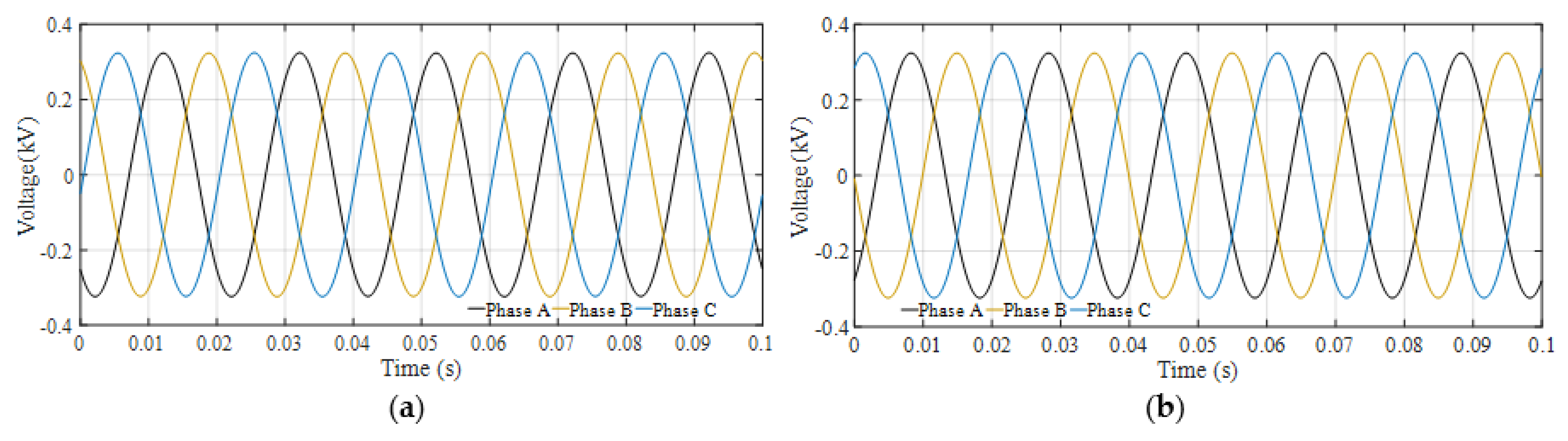
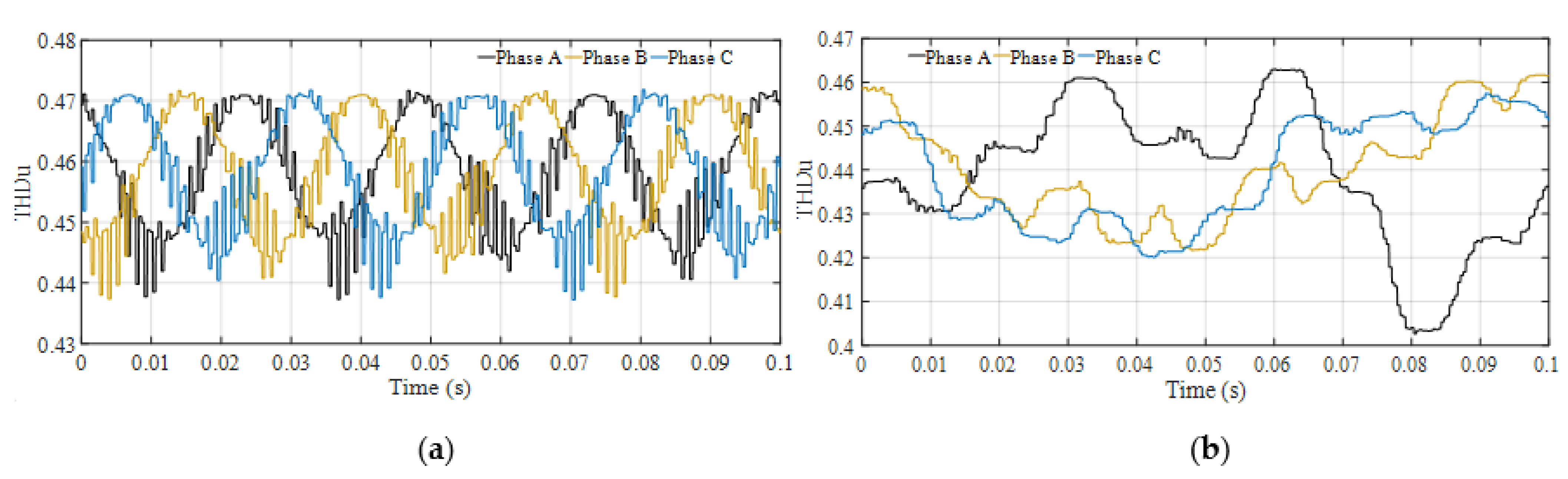
- Use Case 3: Filtering of Harmonics
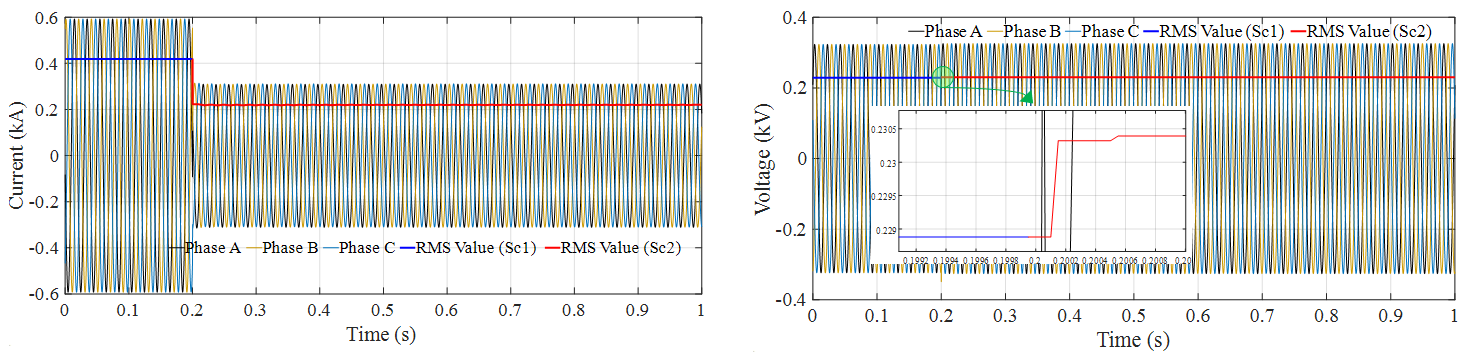
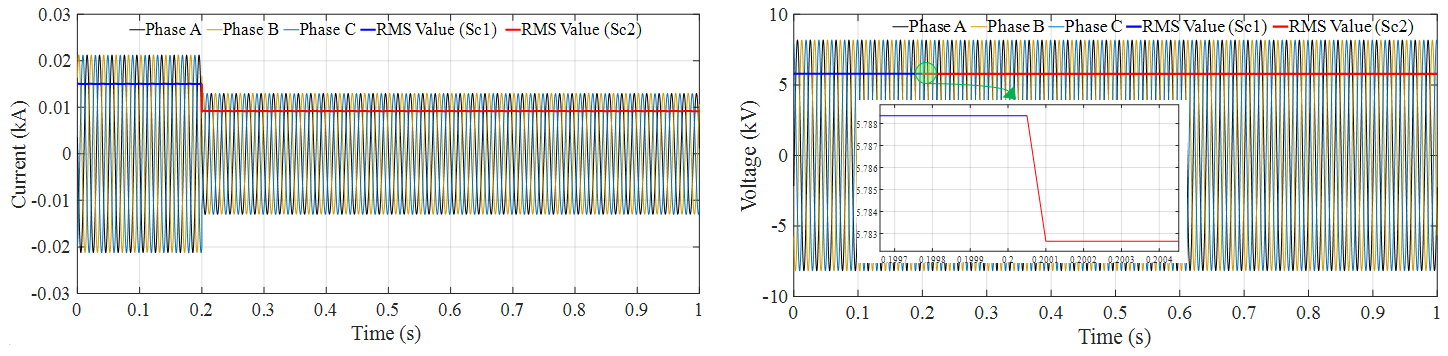
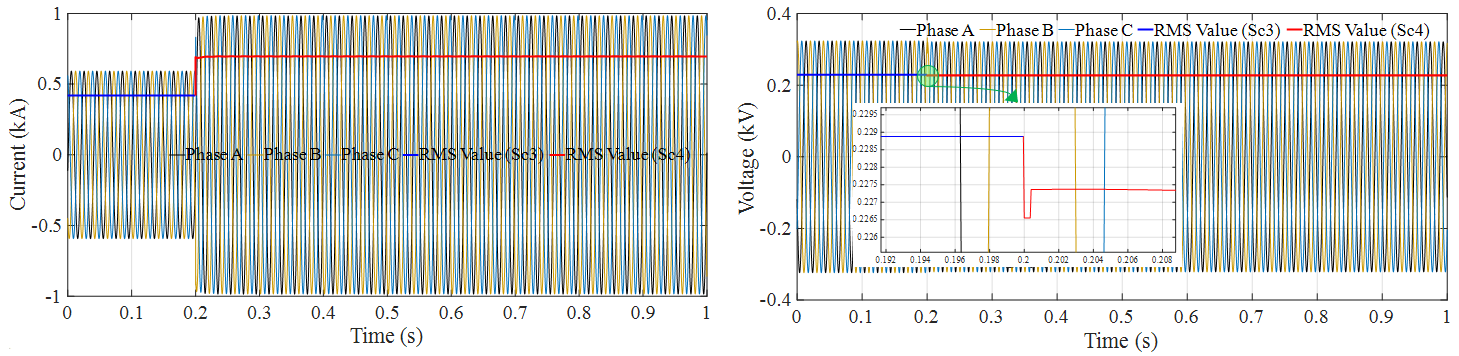
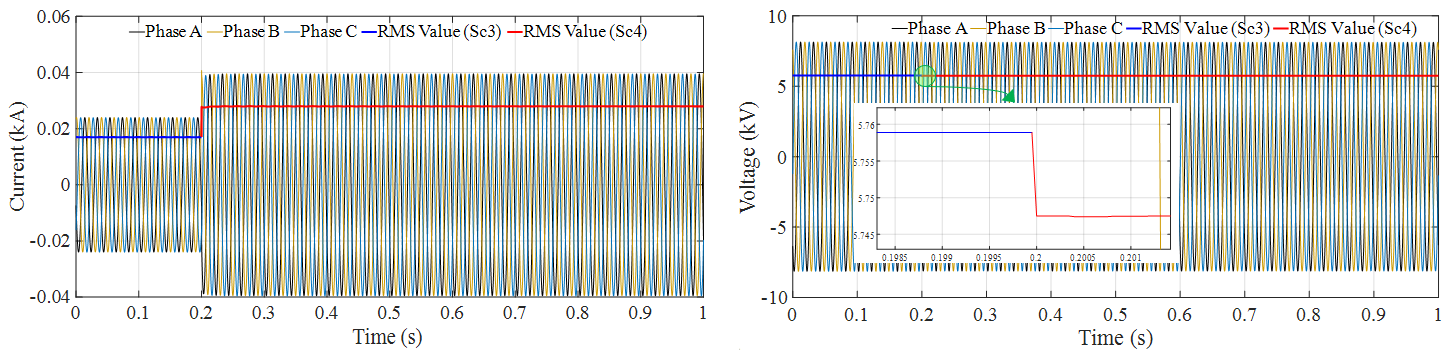
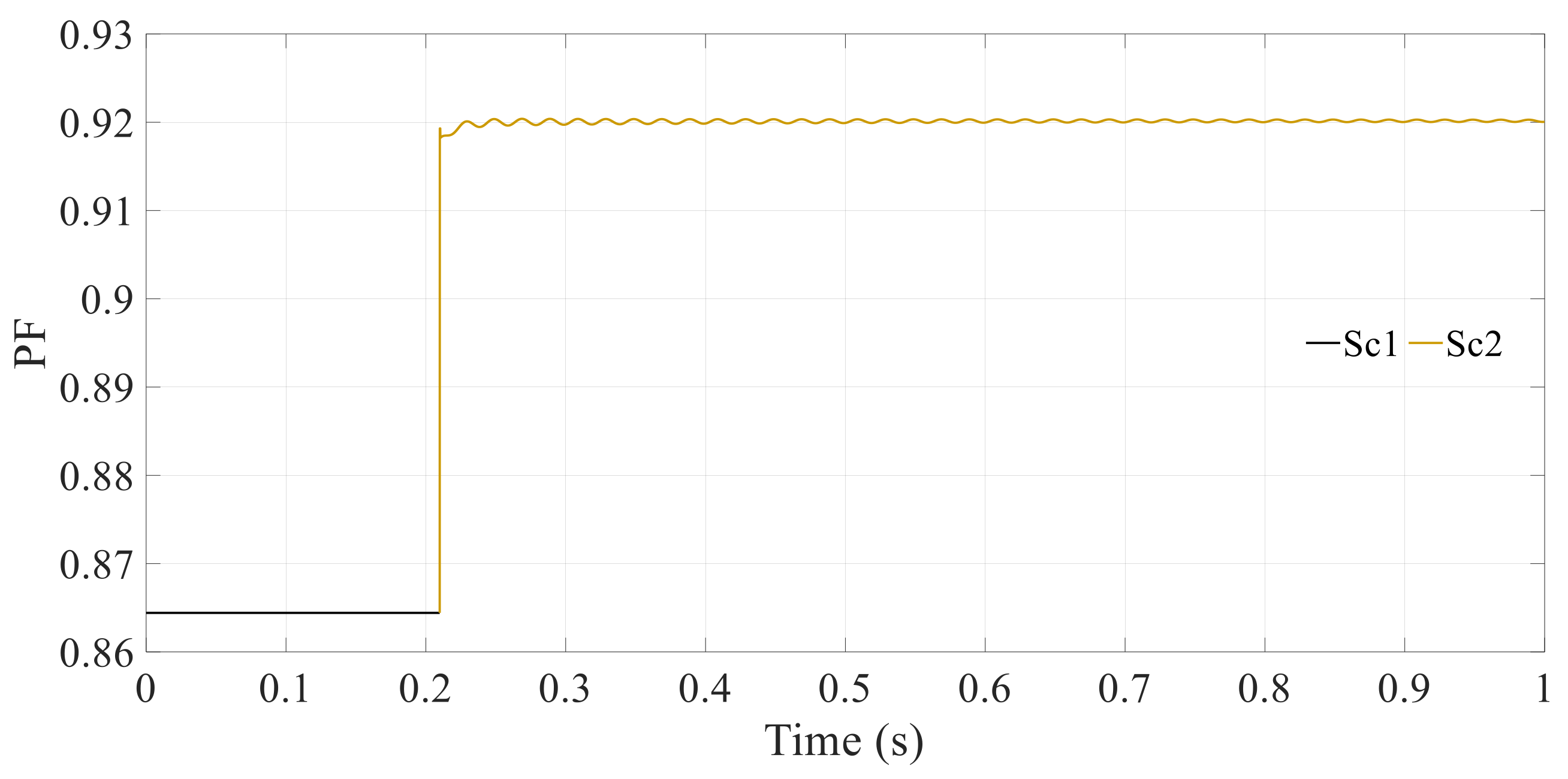
- Use case 4: Reactive Power Injection
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Ding, W.; Huang, L.; Wei, Z.; Liu, H.; Stankovic, J.A. Toward Urban Electric Taxi Systems in Smart Cities: The Battery Swapping Challenge. IEEE Trans. Veh. Technol. 2018, 67, 1946–1960. [Google Scholar] [CrossRef]
- Saldaña, G.; San Martin, J.I.; Zamora, I.; Asensio, F.J.; Oñederra, O. Electric Vehicle into the Grid: Charging Methodologies Aimed at Providing Ancillary Services Considering Battery Degradation. Energies 2019, 12, 2443. [Google Scholar] [CrossRef]
- Cheng, L.; Chang, Y.; Huang, R. Mitigating Voltage Problem in Distribution System With Distributed Solar Generation Using Electric Vehicles. IEEE Trans. Sustain. Energy 2015, 6, 1475–1484. [Google Scholar] [CrossRef]
- Kushwaha, R.; Singh, B. Design and Development of Modified BL Luo Converter for PQ Improvement in EV Charger. IEEE Trans. Ind. Appl. 2020, 56, 1. [Google Scholar] [CrossRef]
- Ferdowsi, M.; Monti, A.; Ponci, F.; Fathi, G. Demand side management verification system for electric vehicles. In Proceedings of the 2014 IEEE International Workshop on Applied Measurements for Power Systems Proceedings (AMPS), Aachen, Germany, 24–26 September 2014; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2014; pp. 1–6. [Google Scholar]
- Markiewicz, H.; Klajn, A. Voltage Disturbances Standard EN 50160-Voltage Characteristics in Public Distribution Systems. Wroc. Univ. Technol. 2004, 21, 215–224. [Google Scholar]
- International Electrotechnical Commission. IEC61000; International Electrotechnical Commission (IEC): Geneva, Switzerland, 2005. [Google Scholar]
- Mehta, R.; Srinivasan, D.; Khambadkone, A.M.; Yang, J.; Trivedi, A. Smart Charging Strategies for Optimal Integration of Plug-In Electric Vehicles Within Existing Distribution System Infrastructure. IEEE Trans. Smart Grid 2018, 9, 299–312. [Google Scholar] [CrossRef]
- Jiang, N.; Xie, C. Computing and Analyzing Mixed Equilibrium Network Flows with Gasoline and Electric Vehicles. Comput. Civ. Infrastruct. Eng. 2014, 29, 626–641. [Google Scholar] [CrossRef]
- Ma, J.; Wang, H.; Tang, T. Stochastic Electric Vehicle Network with Elastic Demand and Environmental Costs. J. Adv. Transp. 2020, 2020, 1–11. [Google Scholar] [CrossRef]
- Hussain, S.; Lee, K.-B.; Ahmed, M.A.; Hayes, B.; Kim, Y.-C. Two-Stage Fuzzy Logic Inference Algorithm for Maximizing the Quality of Performance under the Operational Constraints of Power Grid in Electric Vehicle Parking Lots. Energies 2020, 13, 4634. [Google Scholar] [CrossRef]
- Chukwu, U.C.; Mahajan, S.M. Real-Time Management of Power Systems With V2G Facility for Smart-Grid Applications. IEEE Trans. Sustain. Energy 2013, 5, 558–566. [Google Scholar] [CrossRef]
- Knezovic, K.; Martinenas, S.; Andersen, P.B.; Zecchino, A.; Marinelli, M. Enhancing the Role of Electric Vehicles in the Power Grid: Field Validation of Multiple Ancillary Services. IEEE Trans. Transp. Electrif. 2016, 3, 201–209. [Google Scholar] [CrossRef]
- Lopes, J.A.P.; Soares, F.J.; Almeida, P.M.R. Integration of Electric Vehicles in the Electric Power System. Proc. IEEE 2011, 99, 168–183. [Google Scholar] [CrossRef]
- Aravinthan, V.; Jewell, W. Controlled Electric Vehicle Charging for Mitigating Impacts on Distribution Assets. IEEE Trans. Smart Grid 2015, 6, 999–1009. [Google Scholar] [CrossRef]
- Tan, J.; Wang, L. Integration of Plug-in Hybrid Electric Vehicles into Residential Distribution Grid Based on Two-Layer Intelligent Optimization. IEEE Trans. Smart Grid 2014, 5, 1774–1784. [Google Scholar] [CrossRef]
- Hussain, S.; Ahmed, M.A.; Lee, K.-B.; Kim, Y.-C. Fuzzy Logic Weight Based Charging Scheme for Optimal Distribution of Charging Power among Electric Vehicles in a Parking Lot. Energies 2020, 13, 3119. [Google Scholar] [CrossRef]
- Kavousi-Fard, A.; Rostami, M.A.; Niknam, T. Reliability-Oriented Reconfiguration of Vehicle-to-Grid Networks. IEEE Trans. Ind. Inform. 2015, 11, 682–691. [Google Scholar] [CrossRef]
- Moham, H.A.A. A Synthetic Case Study for Analysis of the Rising Interdependency Between the Power Grid and E-Mobility. IEEE Access 2019, 7, 58802–58809. [Google Scholar] [CrossRef]
- Kallitsis, M.G.; Michailidis, G.; Devetsikiotis, M. A decentralized algorithm for optimal resource allocation in smartgrids with communication network externalities. In Proceedings of the 2011 IEEE International Conference on Smart Grid Communications (SmartGridComm), Brussels, Belgium, 17–20 October 2011; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2011; pp. 434–439. [Google Scholar]
- Kulshrestha, P.; Swaminathan, K.; Chow, M.-Y.; Lukic, S. Evaluation of ZigBee communication platform for controlling the charging of PHEVs at a municipal parking deck. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–10 September 2009; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2009; pp. 1211–1214. [Google Scholar]
- MEISTER. 2018. Available online: https://meisterproject.eu/ (accessed on 11 June 2021).
- Bachmann, R.; Wilke, C.; Zyglakis, L.; Bintoudi, A.; Pavlopoulos, V.; Ioannidis, D.; Ting, W.; Behzad, J.; Antoni, F.; Nowack, C.; et al. D5.2 Smart Grid Services Implementation. 2020. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5cd81dc64&appId=PPGMS (accessed on 11 June 2021).
- Wang, Z.; Yang, R.; Wang, L.; Tan, J. Reliability assessment of integrated residential distribution and PHEV systems using Monte Carlo simulation. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2013; pp. 1–5. [Google Scholar]
- Farzin, H.; Moeini-Aghtaie, M.; Fotuhi-Firuzabad, M. Reliability Studies of Distribution Systems Integrated With Electric Vehicles Under Battery-Exchange Mode. IEEE Trans. Power Deliv. 2015, 31, 2473–2482. [Google Scholar] [CrossRef]
- Smart Grid Traffic Light Concept; BDEW, German Association of Energy and Water Industries: Berlin, Germany, 2015.
- Bintoudi, A.; Zyglakis, L.; Tsolakis, A.; Gkaidatzis, P.; Tryferidis, A.; Ioannidis, D.; Tzovaras, D. OptiMEMS: An Adaptive Lightweight Optimal Microgrid Energy Management System Based on the Novel Virtual Distributed Energy Resources in Real-Life Demonstration. Energies 2021, 14, 2752. [Google Scholar] [CrossRef]
- Smart Grid Coordination Group. SGAM User Manual—Applying, Testing & Refining the Smart Grid Architecture Model (SGAM); CEN–CENELEC–ETSI: Brussels, Belgium, 2014. [Google Scholar]
- IEC 61850-7-1. Basic Communication Structure—Principles and Models; International Electrotechnical Commission (IEC): Geneva, Switzerland, 2003. [Google Scholar]
- IEC 61850-8-1. Specific Communication Service Mapping (SCSM)—Mappings to MMS (ISO 9506-1 and ISO 9506-2) and to ISO/IEC 8802-3; International Electrotechnical Commission (IEC): Geneva, Switzerland, 2004. [Google Scholar]
- IEC 60870-5-104. Transmission Protocols—Network Access for IEC 60870-5-101 Using Standard Transport Profiles; International Electrotechnical Commission (IEC): Geneva, Switzerland, 2006. [Google Scholar]
- Leeuw, R.D.; Lamers, R.; McMahon, B.; Muhlenberg, L.; Rademakers, P.; Tcaciuc, S.; Zuuren und, F.; Buve, K.V. Open Charge Point Protocol 1.6. Open Charge Alliance. 2015. Available online: https://www.oasis-open.org/committees/download.php/58944/ocpp-1.6.pdf (accessed on 11 June 2021).
- Kansal, P.; Bose, A. Bandwidth and Latency Requirements for Smart Transmission Grid Applications. IEEE Trans. Smart Grid 2012, 3, 1344–1352. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, X.; Cao, Y.; Wang, D.; Yang, L. Smart Choice for the Smart Grid: Narrowband Internet of Things (NB-IoT). IEEE Internet Things J. 2017, 5, 1505–1515. [Google Scholar] [CrossRef]
- RTDS Hardware Manual. Available online: https://www.rtds.com/ (accessed on 11 June 2021).
- Linux Mint. Available online: https://linuxmint.com/ (accessed on 11 June 2021).
- IEC60870 C Library. Available online: https://github.com/mz-automation/lib60870.git (accessed on 11 June 2021).
- IEC 61850 C Library. Available online: https://github.com/mz-automation/libiec61850.git (accessed on 11 June 2021).
- net-line FW-5-GATE. Available online: https://www.sae-it.com/de/produkte/fernwirktechnik/fw-5-gate.html (accessed on 11 June 2021).
- Results. Available online: https://www.acs.eonerc.rwth-aachen.de/go/id/osuwh?lidx=1#aaaaaaaaaaoszdf (accessed on 11 June 2021).
- Mahmud, M.A.; Hossain, M.J.; Pota, H.R. Analysis of Voltage Rise Effect on Distribution Network with Distributed Generation. IFAC Proc. Vol. 2011, 44, 14796–14801. [Google Scholar] [CrossRef]
- Arranz, S.R.; Romero-Cadaval, E.; Romera, E.G.; Montero, M.I.M. Study of Spread of Harmonics in an Electric Grid. In Doctoral Conference on Computing, Electrical and Industrial Systems; Springer: Berlin/Heidelberg, Germany, 2011; Volume 349, pp. 457–465. [Google Scholar]
- Liang, X.; Andalib-Bin-Karim, C. Harmonics and Mitigation Techniques Through Advanced Control in Grid-Connected Renewable Energy Sources: A Review. IEEE Trans. Ind. Appl. 2018, 54, 3100–3111. [Google Scholar] [CrossRef]
- Wilson, A.J.; Reising, D.R.; Hay, R.W.; Johnson, R.C.; Karrar, A.A.; Loveless, T.D. Automated Identification of Electrical Disturbance Waveforms Within an Operational Smart Power Grid. IEEE Trans. Smart Grid 2020, 11, 4380–4389. [Google Scholar] [CrossRef]
- Platas-Garza, M.A.; de la O Serna, J. A Polynomial Implementation of the Taylor–Fourier Transform for Harmonic Analysis. IEEE Trans. Instrum. Meas. 2014, 63, 2846–2854. [Google Scholar] [CrossRef]
- Hidalgo, R.; Fernandez, J.; Rivera, R.; Larrondo, H. A simple adjustable window algorithm to improve FFT measurements. IEEE Trans. Instrum. Meas. 2002, 51, 31–36. [Google Scholar] [CrossRef]
- VDE-AR-N 4105—Generators Connected to the Low-Voltage Distribution Network. 0100492, 2018-11. Available online: https://www.vde.com/en/fnn/topics/technical-connection-rules/power-generating-plants (accessed on 11 June 2021).
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
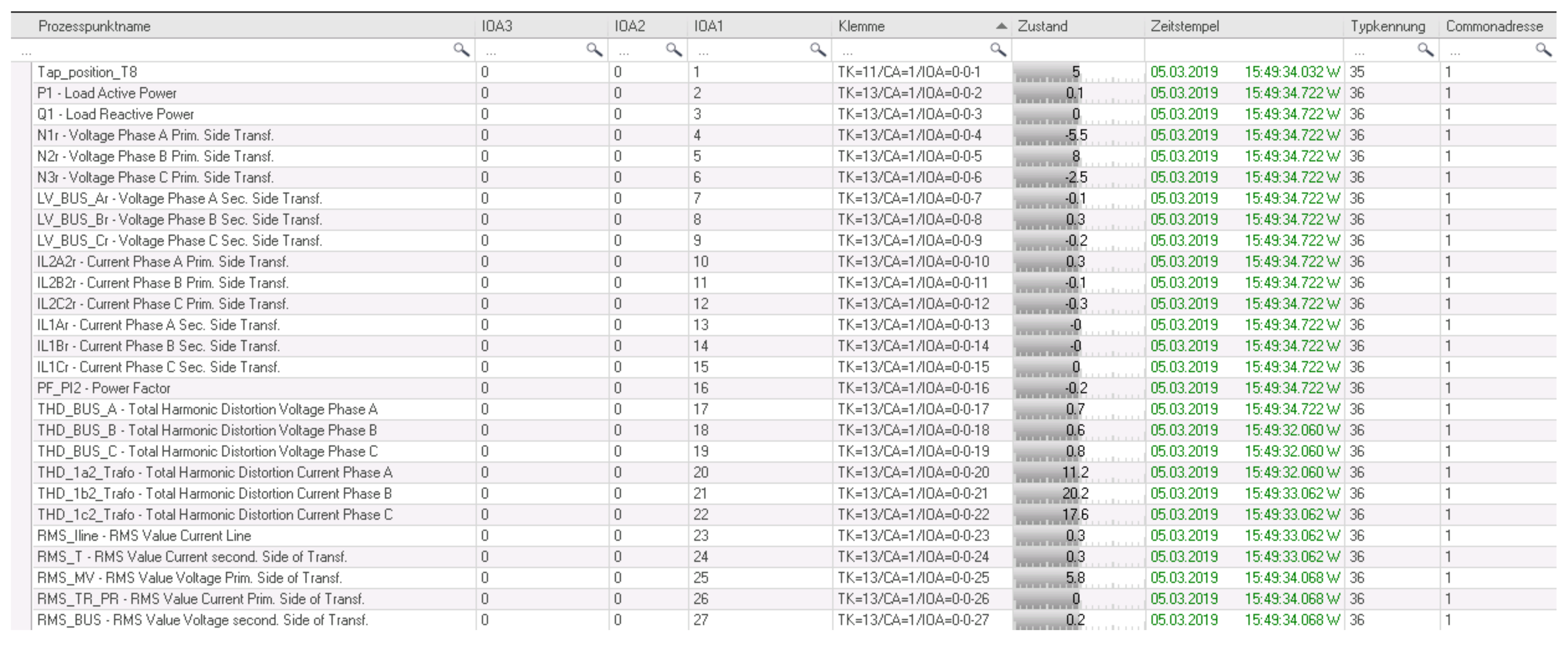
| # | Electrical Variable | # | Electrical Variable |
|---|---|---|---|
| 1 | Transformer tap position | 8 | Three-phase voltage total harmonic distortion |
| 2 | Load active and reactive power | 9 | Three-phase current total harmonic distortion |
| 3 | Three-phase voltage at the primary side of the transformer | 10 | RMS line current |
| 4 | Three-phase voltage at the secondary side of the transformer | 11 | RMS transformer current at the primary side |
| 5 | Three-phase current at the primary side of the transformer | 12 | RMS transformer current at the secondary side |
| 6 | Three-phase current at the secondary side of the transformer | 13 | RMS transformer voltage at the primary side |
| 7 | Power factor | 14 | RMS transformer voltage at the secondary side |
| # | Parameter | Measurement | Operating Range | Duration |
|---|---|---|---|---|
| 1 | Grid frequency | 10 s mean value | ±1% (49.5–50.5 Hz) −6%/+4% (47–52 Hz) | for 99.5% of the week for 100% of the week |
| 2 | Voltage magnitude | 10 min RMS values | LV, MV: ±10% | for 95% of the week |
| 3 | Flickers | 10 min RMS values | ≤1 | for 95% of the week |
| 4 | Voltage unbalance | 10 min mean of RMS values | <2% | for 95% of the week |
| 5 | Total harmonic distortion | 10 min mean of RMS values of harmonics from 1st to the 40th order | <8% | for 100% of the time |
| Scenario | Load (kW) | PF | Wind Turbine (kW) | PF | PV (kW) | p-f | EV Station (kW) | PF |
|---|---|---|---|---|---|---|---|---|
| 1 | 600 | 0.97 | −200 | 1.0 | −150 | 1.0 | 0 | 1.0 |
| 2 | 600 | 0.97 | −200 | 1.0 | −150 | 1.0 | −200 | 1.0 |
| Scenario | Load (kW) | PF | Wind Turbine (kW) | PF | PV (kW) | PF | EV Station (kW) | PF |
|---|---|---|---|---|---|---|---|---|
| 1 | 100 | 0.97 | −200 | 1.0 | −150 | 1.0 | 0 | 1.0 |
| 2 | 100 | 0.97 | −200 | 1.0 | −150 | 1.0 | +100 | 1.0 |
| 3 | 600 | 0.97 | −200 | 1.0 | −150 | 1.0 | 0 | 1.0 |
| 4 | 600 | 0.97 | −200 | 1.0 | −150 | 1.0 | +200 | 1.0 |
| Scenario | Load (kW) | PF | Wind Turbine (kW) | PF | PV (kW) | PF | EV Station 1 (kW) | PF | EV Station 2 (kW) | PF | Harmonic Source (Hz) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 100 | 0.97 | −200 | 1.0 | 0 | 1.0 | 0 | 1.0 | 0 | 1.0 | 20 |
| 2 | 100 | 0.97 | −200 | 1.0 | 0 | 1.0 | +100 | 1.0 | −100 | 1.0 | 20 |
| Scenario | Load (kW) | PF | Wind Turbine (kVA) | PF | PV (kW) | PF | Battery (kVA) | PF |
|---|---|---|---|---|---|---|---|---|
| 1 | 600 | 0.97 | −510 | 0 | 0 | 1 | 0 | 0 |
| 2 | 600 | 0.97 | −510 | 0 | 0 | 1 | +200 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zargar, B.; Wang, T.; Pitz, M.; Bachmann, R.; Maschmann, M.; Bintoudi, A.; Zyglakis, L.; Ponci, F.; Monti, A.; Ioannidis, D. Power Quality Improvement in Distribution Grids via Real-Time Smart Exploitation of Electric Vehicles. Energies 2021, 14, 3533. https://doi.org/10.3390/en14123533
Zargar B, Wang T, Pitz M, Bachmann R, Maschmann M, Bintoudi A, Zyglakis L, Ponci F, Monti A, Ioannidis D. Power Quality Improvement in Distribution Grids via Real-Time Smart Exploitation of Electric Vehicles. Energies. 2021; 14(12):3533. https://doi.org/10.3390/en14123533
Chicago/Turabian StyleZargar, Behzad, Ting Wang, Manuel Pitz, Rainer Bachmann, Moritz Maschmann, Angelina Bintoudi, Lampros Zyglakis, Ferdinanda Ponci, Antonello Monti, and Dimosthenis Ioannidis. 2021. "Power Quality Improvement in Distribution Grids via Real-Time Smart Exploitation of Electric Vehicles" Energies 14, no. 12: 3533. https://doi.org/10.3390/en14123533
APA StyleZargar, B., Wang, T., Pitz, M., Bachmann, R., Maschmann, M., Bintoudi, A., Zyglakis, L., Ponci, F., Monti, A., & Ioannidis, D. (2021). Power Quality Improvement in Distribution Grids via Real-Time Smart Exploitation of Electric Vehicles. Energies, 14(12), 3533. https://doi.org/10.3390/en14123533