
Designing a Smart Gateway for Data Fusion Implementation in a Distributed Electronic System Used in Automotive Industry


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
Related Work
2. Process Representation—Conceptual Framework
2.1. Process Definition
2.2. Process Model Design on ARM Cortex Controller
3. Software Design—Study Case
3.1. Algorithm Optimization
3.2. Hardware-Based Software Optimization
3.3. Software Optimization
4. Tests Results
4.1. User Defined Standard-Based Tests
4.2. Compatibility Issue Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Deloitte. Big Data and Analytics in the Automotive Industry. Automotive Analytics through Piece Report. Available online: https://www2.deloitte.com/content/dam/Deloitte/uk/Documents/manufacturing/deloitte-uk-automotive-analytics.pdf (accessed on 10 March 2019).
- Ustundag, A.; Cevikcan, E. Industry 4.0: Managing The Digital Transformation; Springer: Berlin/Heidelberg, Germany, 2018; ISBN 978-3-319-57869-9. [Google Scholar]
- Douaioui, K.; Fri, M.; Mabroukki, C.; Semma, E.A. The interaction between industry 4.0 and smart logistics: Concepts and perspectives. In Proceedings of the 2018 International Colloquium on Logistics and Supply Chain Management (LOGISTIQUA), Tangier, Morocco, 26–27 April 2018; pp. 128–132. [Google Scholar] [CrossRef]
- SAE J1930. Available online: https://law.resource.org/pub/us/cfr/ibr/005/sae.j1930.2002.pdf (accessed on 12 July 2019).
- Brando, G.; Dannier, A.; del Pizzo, A.; Rizzo, R. Power Electronic Transformer for advanced grid management in presence of distributed generation. Int. Rev. Electr. Eng. 2011, 6, 3009–3015. [Google Scholar]
- Rizzo, R.; Tricoli, P.; Spina, I. An innovative reconfigurable integrated converter topology suitable for distributed generation. Energies 2012, 5, 3640–3654. [Google Scholar] [CrossRef]
- Di Noia, L.P.; Genduso, F.; Miceli, R.; Rizzo, R. Optimal integration of hybrid supercapacitor and IPT system for a free-catenary tramway. IEEE Transa. Ind. Appl. 2019, 55, 794–801. [Google Scholar] [CrossRef]
- Eascy, Five Trends Transforming the Automotive Industry. Available online: www.pwc.com/auto (accessed on 22 July 2019).
- Morimoto, T. Connectivity and Big Data Analytics in Automotive; ICT Outlook Executive Briefing; Frost & Sullivan: New York, NY, USA, 2015. [Google Scholar]
- Malekian, R.; Moloisane, N.R.; Nair, L. Design and Implementation of a Wireless OBD II Fleet Management System. IEEE Sens. J. 2017, 17, 1154–1164. [Google Scholar] [CrossRef]
- Keenan, J. Creating A Wireless OBDII Scanner, Project Number: MQP-SJB-4C09. Available online: https://web.wpi.edu/Pubs/E-project/Available/E-project-043009-154526/unrestricted/JOHNKEENANIIIMQP2009.pdf (accessed on 15 February 2020).
- Risteiu, M.; Dobra, R. Designing Dedicated Electronic Systems—Mechatronics Embedded System; Universitas Publishing House: Petrosani, Romania, 2019; ISBN 978-973-741-618-6. [Google Scholar]
- Darwish, A.; Lakhtaria, K.I. The Impact of the New Web 2.0 Technologies in Communication, Development, and Revolutions of Societies. J. Adv. Inf. Technol. 2011, 2, 204–216. [Google Scholar] [CrossRef]
- Hayes, B. Cloud Computing. Commun. ACM 2008, 51, 9–11. [Google Scholar] [CrossRef]
- Liu, Q.; Sun, X. Research of Web Real-Time Communication Based on Web Socket. Int. J. Commun. Netw. Syst. Sci. 2012, 5, 797–801. [Google Scholar] [CrossRef]
- Kiszka, J. The Real-Time Driver Model and First Applications. Available online: http://www.cs.ru.nl/lab/xenomai/RTDM-and-Applications.pdf (accessed on 22 July 2019).
- Grigorik, I. High Performance Browser Networking; O’Reilly Media, Inc.: Sevastopol, CA, USA, 2013; Available online: https://hpbn.co/ (accessed on 22 July 2019).
- Jennings, N. Socket Programming in Python (Guide). Available online: https://realpython.com/python-sockets/ (accessed on 23 July 2019).
- Nakamura, G. Why Hadoop Only Solves a Third of the Growing Pains for Big Data. Available online: https://www.wired.com/insights/2014/01/hadoop-solves-third-growing-pains-big-data/ (accessed on 23 July 2019).
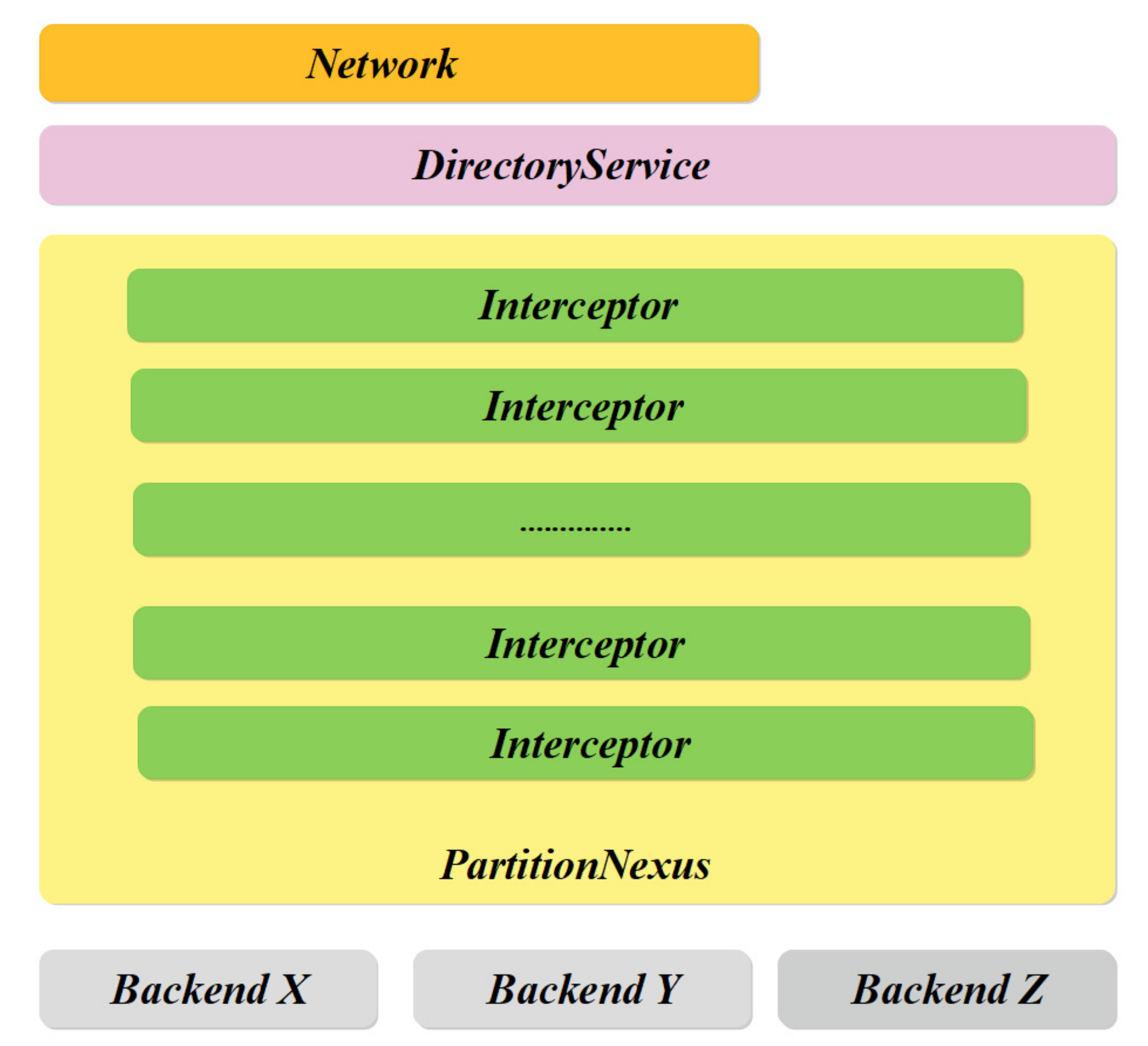
- Apache Directory. Available online: https://directory.apache.org/apacheds/advanced-ug/1.5-backend.html (accessed on 20 May 2019).
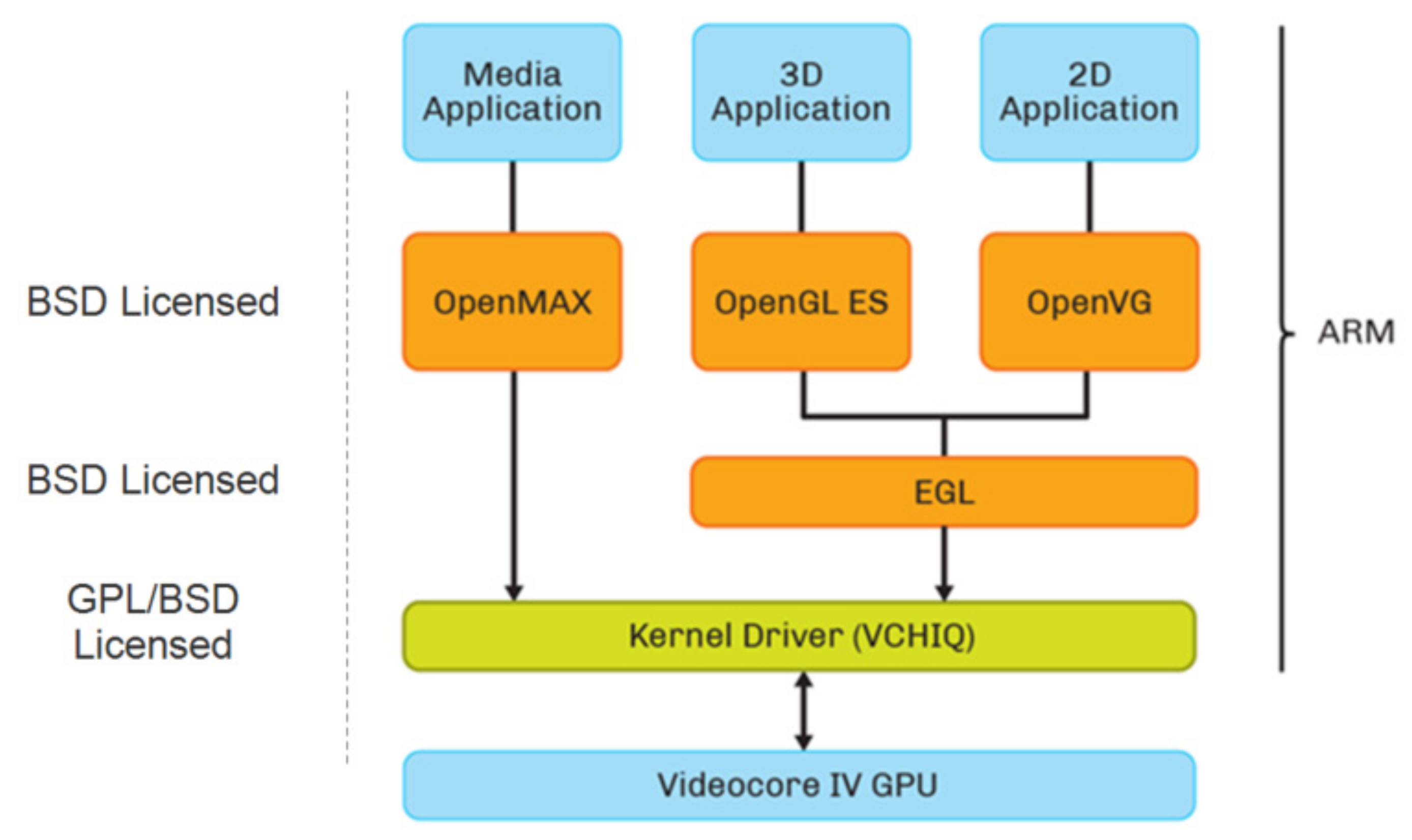
- Raspberry Pi Architecture. Available online: https://www.macs.hw.ac.uk/~hwloidl/Courses/F28HS/slides_RPi_arch.pdf (accessed on 22 May 2019).
- BCM2835 Documentation. Available online: https://www.raspberrypi.org/documentation/hardware/raspberrypi/bcm2835/README.md (accessed on 20 May 2019).
- The MagPi Magazine. Available online: https://www.raspberrypi.org/magpi/tutorials/ (accessed on 2 September 2019).
- Nayyar, A.; Puri, V. Raspberry Pi-A Small, Powerful, Cost Effective and Efficient Form Factor Computer: A Review. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2015, 5, 720–737. [Google Scholar]
- Qutqut, M.H.; Al-Sakran, A. Comprehensive survey of the IoT open source Oss. IET Wirel. Sens. Syst. 2018, 8, 323–339. [Google Scholar] [CrossRef]
- Tuan, C.C.; Lu, C.H.; Wu, Y.C.; Yeh, W.L.; Chen, M.C.; Lee, T.F.; Chen, Y.-J.; Kao, H.-K. Development of a System for Real-Time Monitoring of Pressure, Temperature, and Humidity in Casts. Sensors 2019, 19, 2417. [Google Scholar] [CrossRef]
- Viel, F.; Augusto Silva, L.; Leithardt, V.R.Q.; De Paz Santana, J.F.; Celeste Ghizoni Teive, R.; Albenes Zeferino, C. An Efficient Interface for the Integration of IoT Devices with Smart Grids. Sensors 2020, 20, 2849. [Google Scholar] [CrossRef] [PubMed]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rîșteiu, M.; Dobra, R.; Avram, A.; Samoilă, F.; Buică, G.; Rizzo, R.; Micu, D.D. Designing a Smart Gateway for Data Fusion Implementation in a Distributed Electronic System Used in Automotive Industry. Energies 2021, 14, 3300. https://doi.org/10.3390/en14113300
Rîșteiu M, Dobra R, Avram A, Samoilă F, Buică G, Rizzo R, Micu DD. Designing a Smart Gateway for Data Fusion Implementation in a Distributed Electronic System Used in Automotive Industry. Energies. 2021; 14(11):3300. https://doi.org/10.3390/en14113300
Chicago/Turabian StyleRîșteiu, Mircea, Remus Dobra, Alexandru Avram, Florin Samoilă, Georgeta Buică, Renato Rizzo, and Dan Doru Micu. 2021. "Designing a Smart Gateway for Data Fusion Implementation in a Distributed Electronic System Used in Automotive Industry" Energies 14, no. 11: 3300. https://doi.org/10.3390/en14113300
APA StyleRîșteiu, M., Dobra, R., Avram, A., Samoilă, F., Buică, G., Rizzo, R., & Micu, D. D. (2021). Designing a Smart Gateway for Data Fusion Implementation in a Distributed Electronic System Used in Automotive Industry. Energies, 14(11), 3300. https://doi.org/10.3390/en14113300