
Analysis of Effect of the Magnetization Distribution of Multi-Pole PM on SPMSM Performance Using Equivalent Magnetic Circuit Considering Dead Zone

 , , , and
, , , and 
Abstract
:1. Introduction
2. Equivalent Magnetic Circuit Considering Dead Zone of Multi-Pole PMs
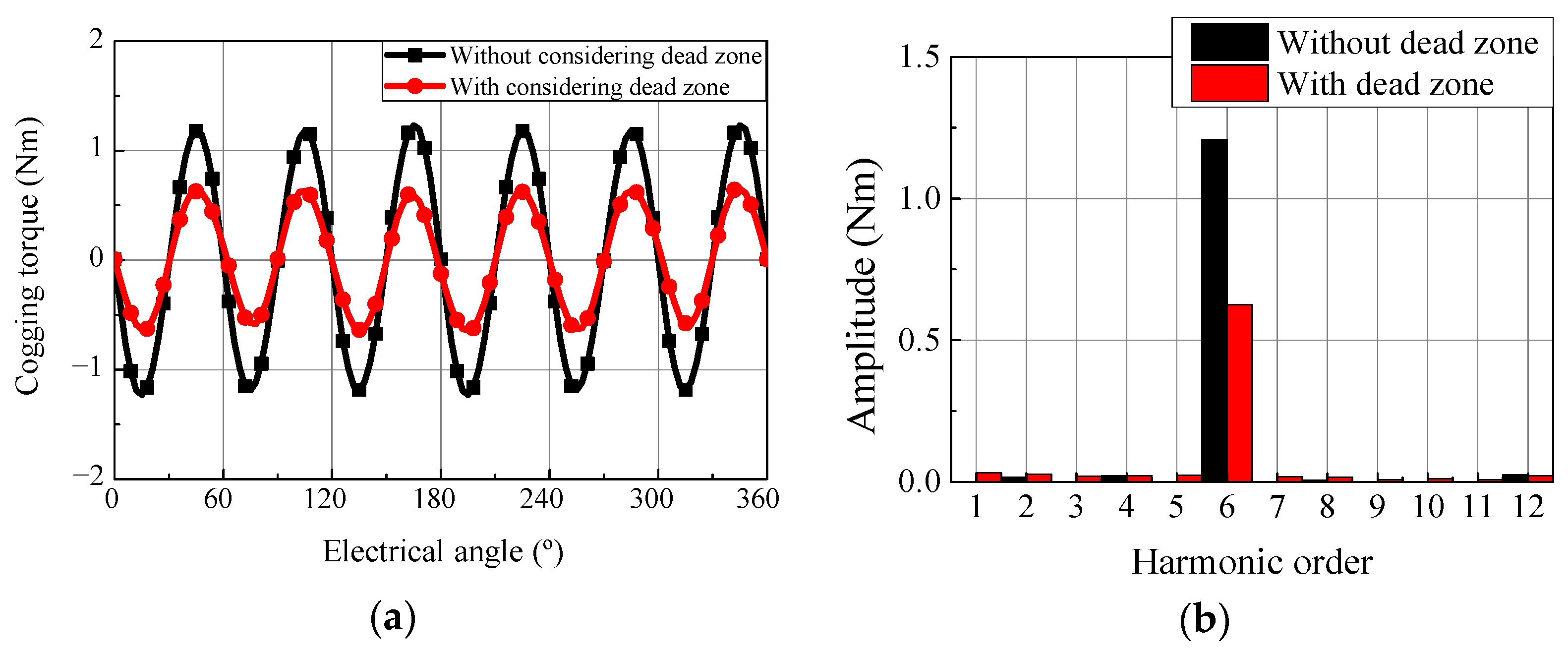
2.1. Motor Performance Analysis with/without Considering Dead Zone
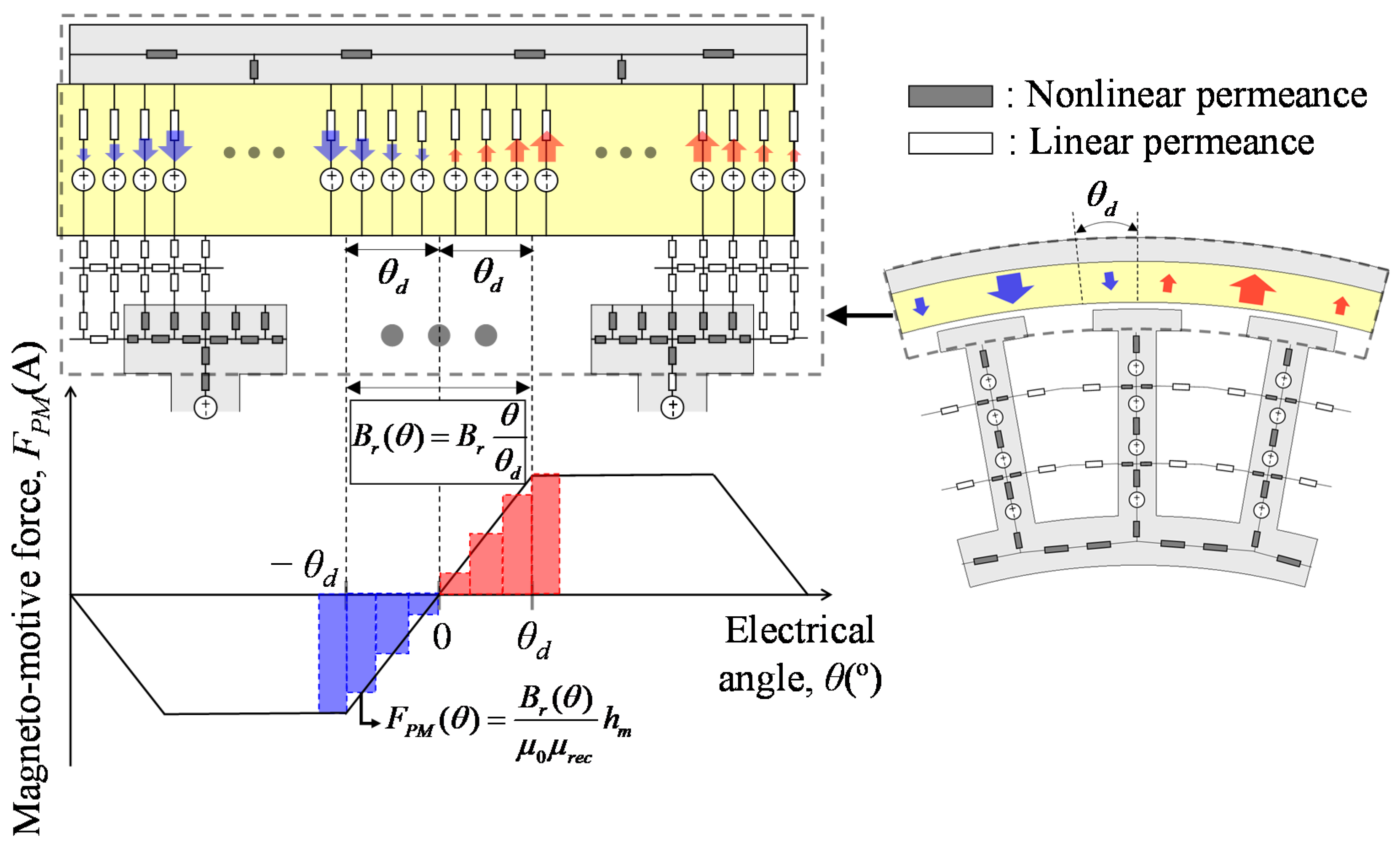
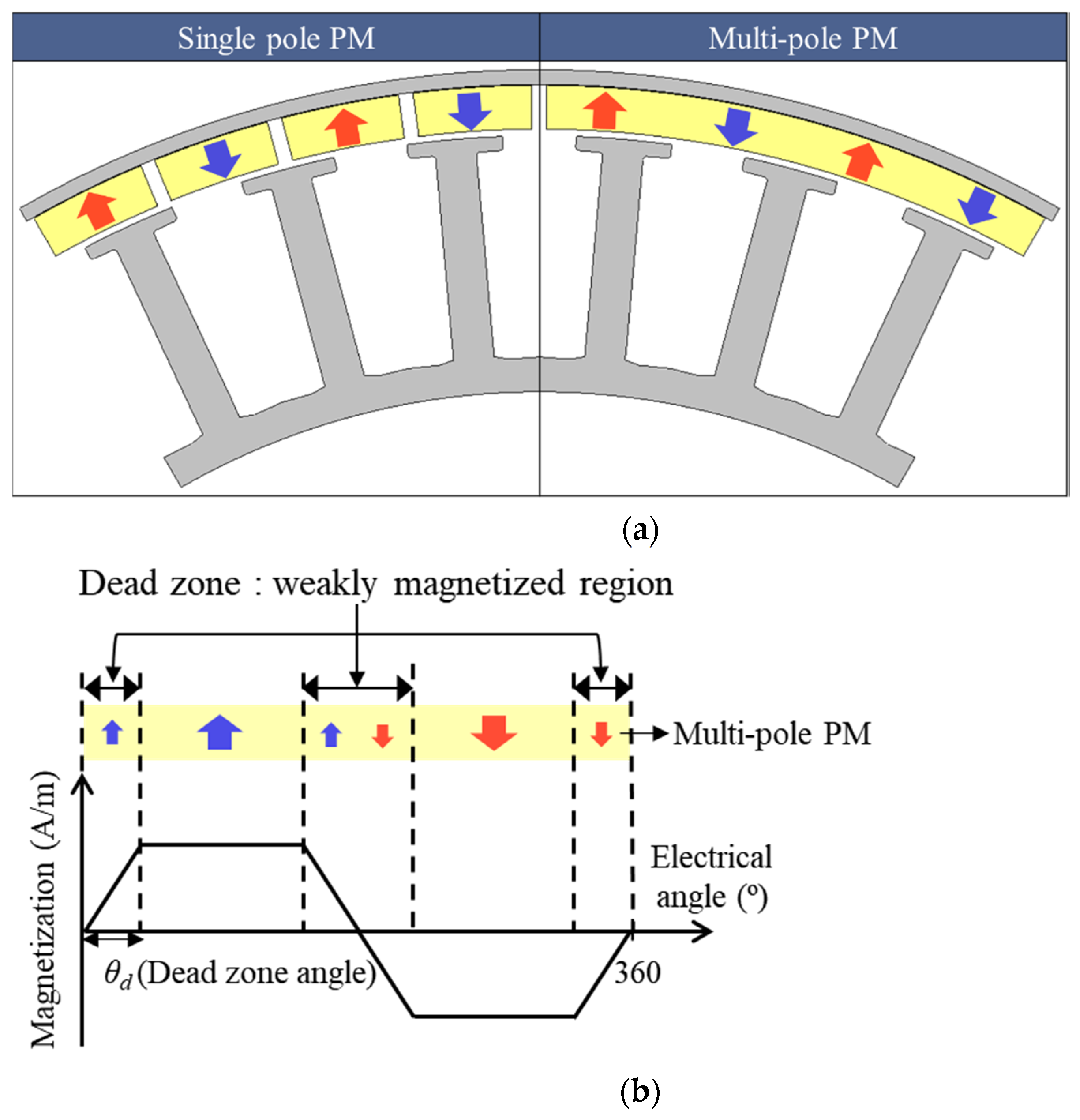
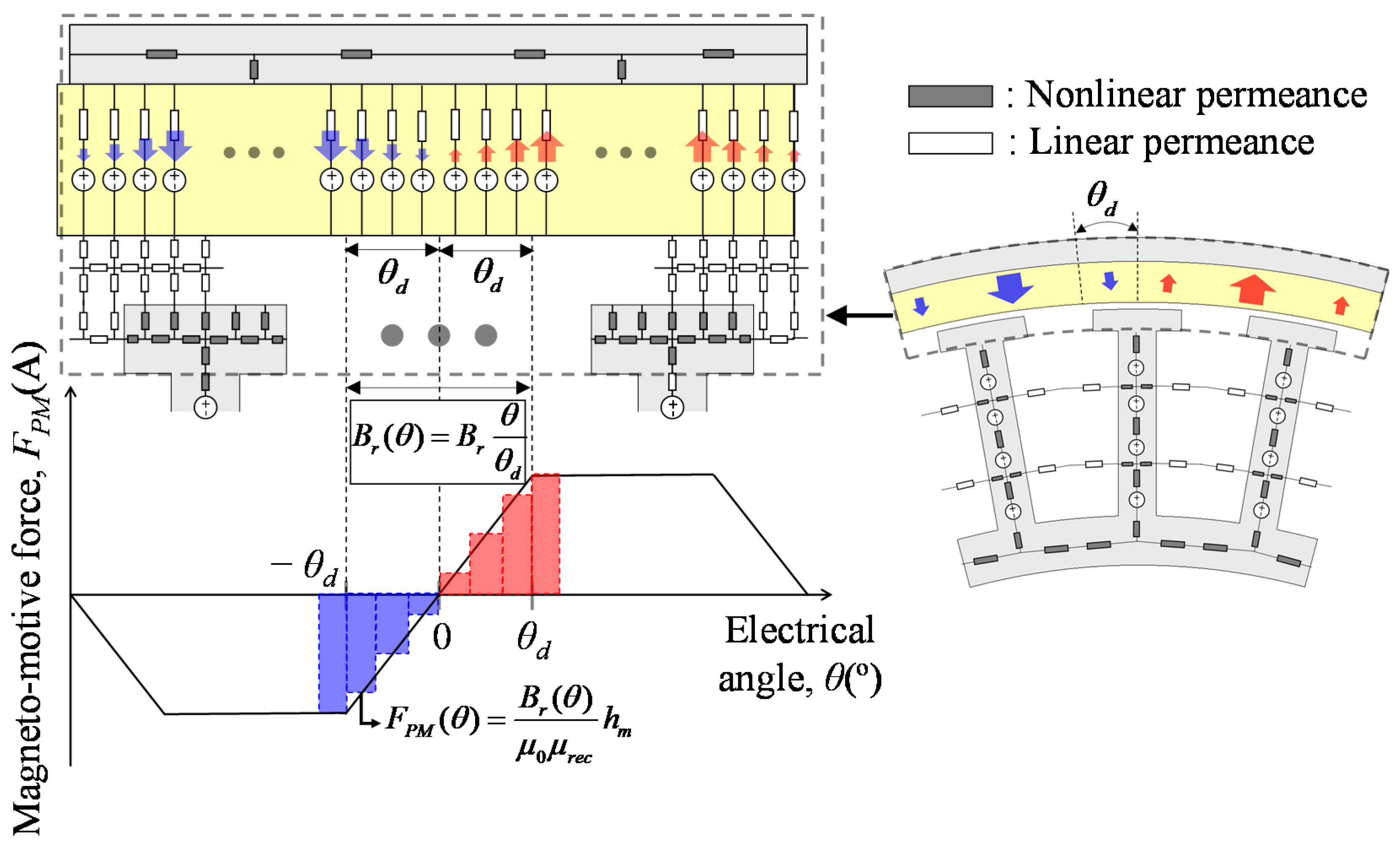
2.2. Permanent Magnet Modeling Considering Dead Zone Angle
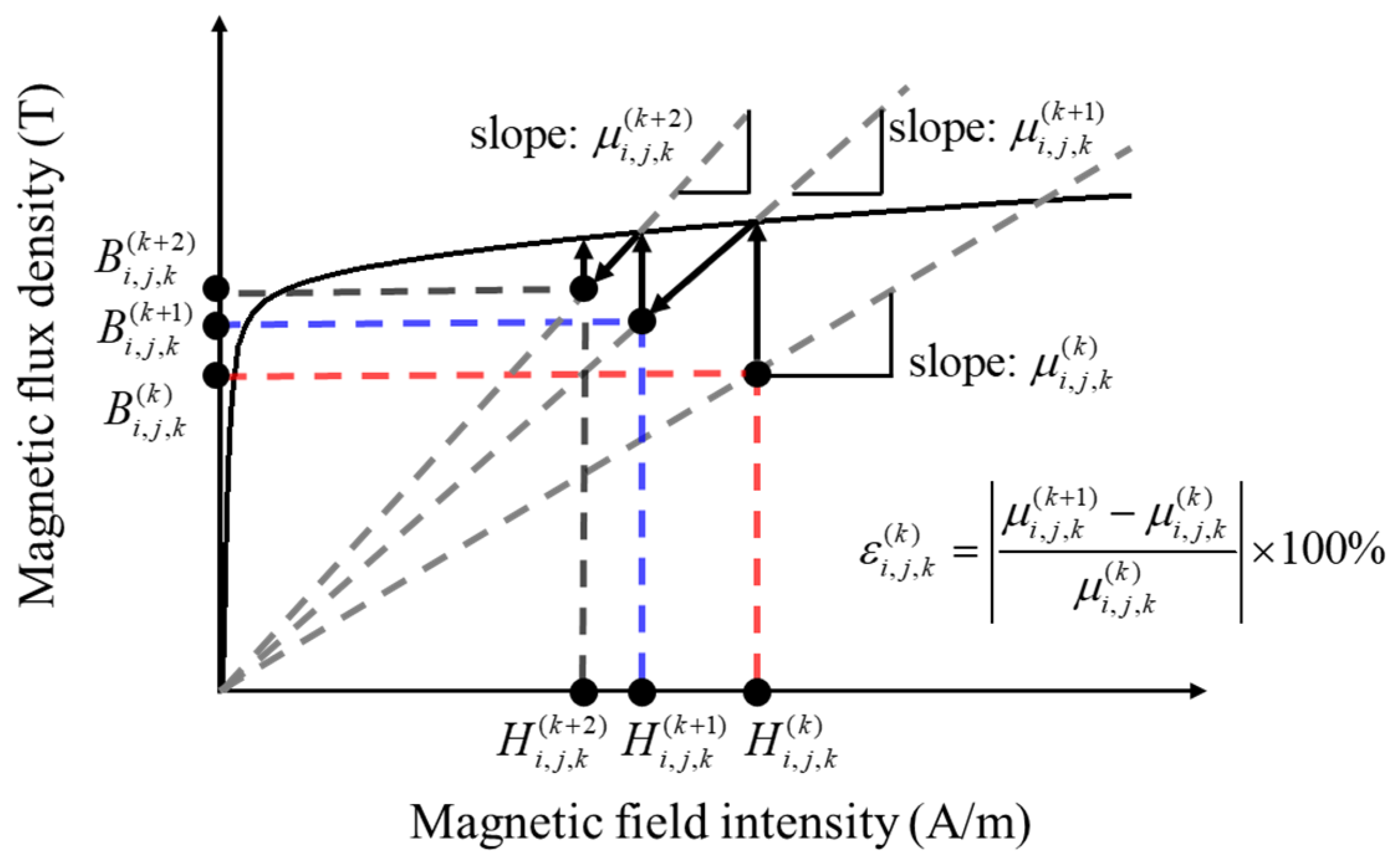
2.3. Numerical Solution of EMC
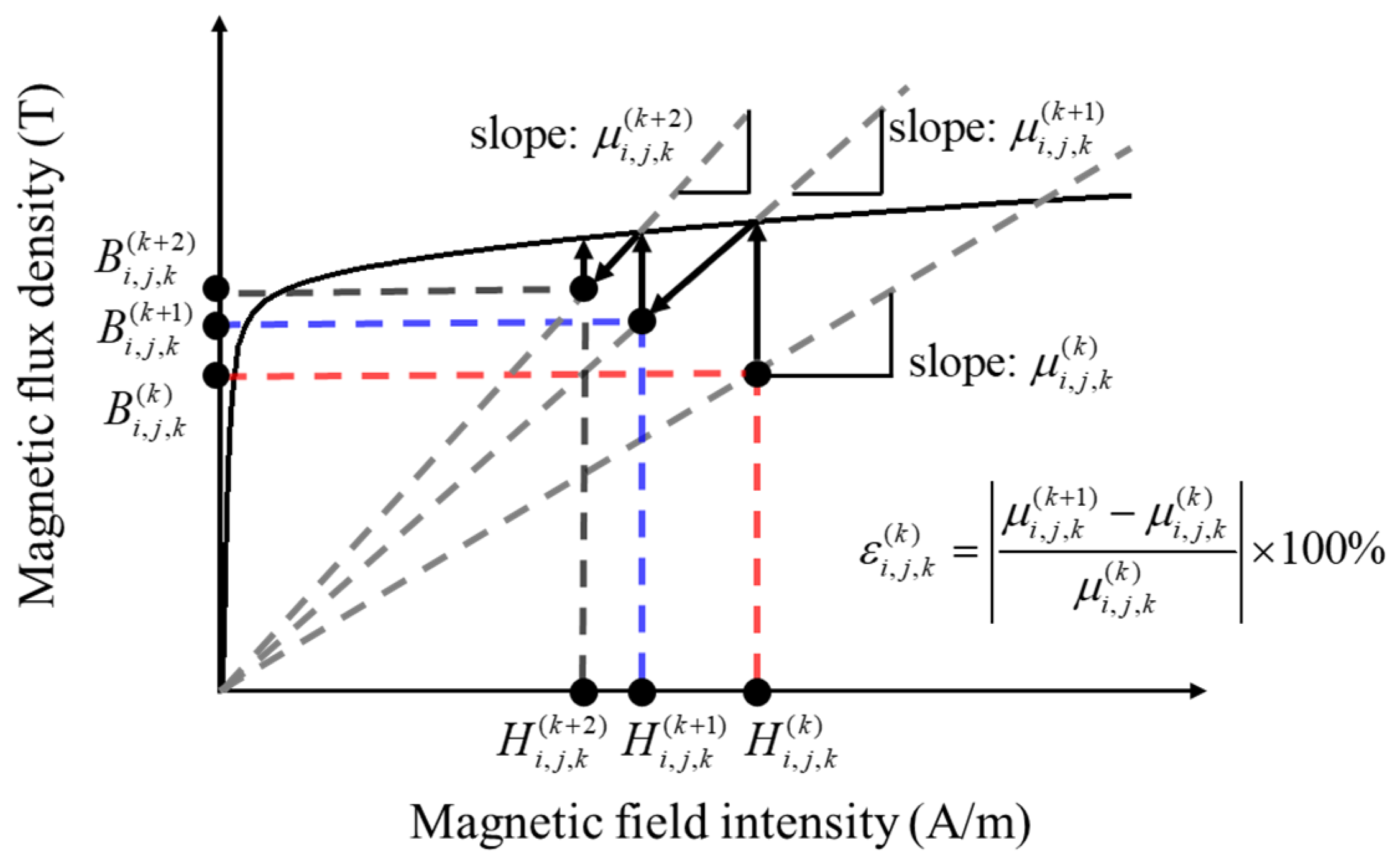
- For an arbitrary node or element (i, j, k) for the kth iteration process, magnetic flux density is calculated based on the existing permeability .
- Then, permeability is renewed as using magnetic field intensity , where is calculated by dividing into .
- If tolerance, the aforementioned procedure is performed again, and k is also renewed as k + 1, where .
- If tolerance, save the calculated parameters.
3. Analytical Results and Comparison with FEA
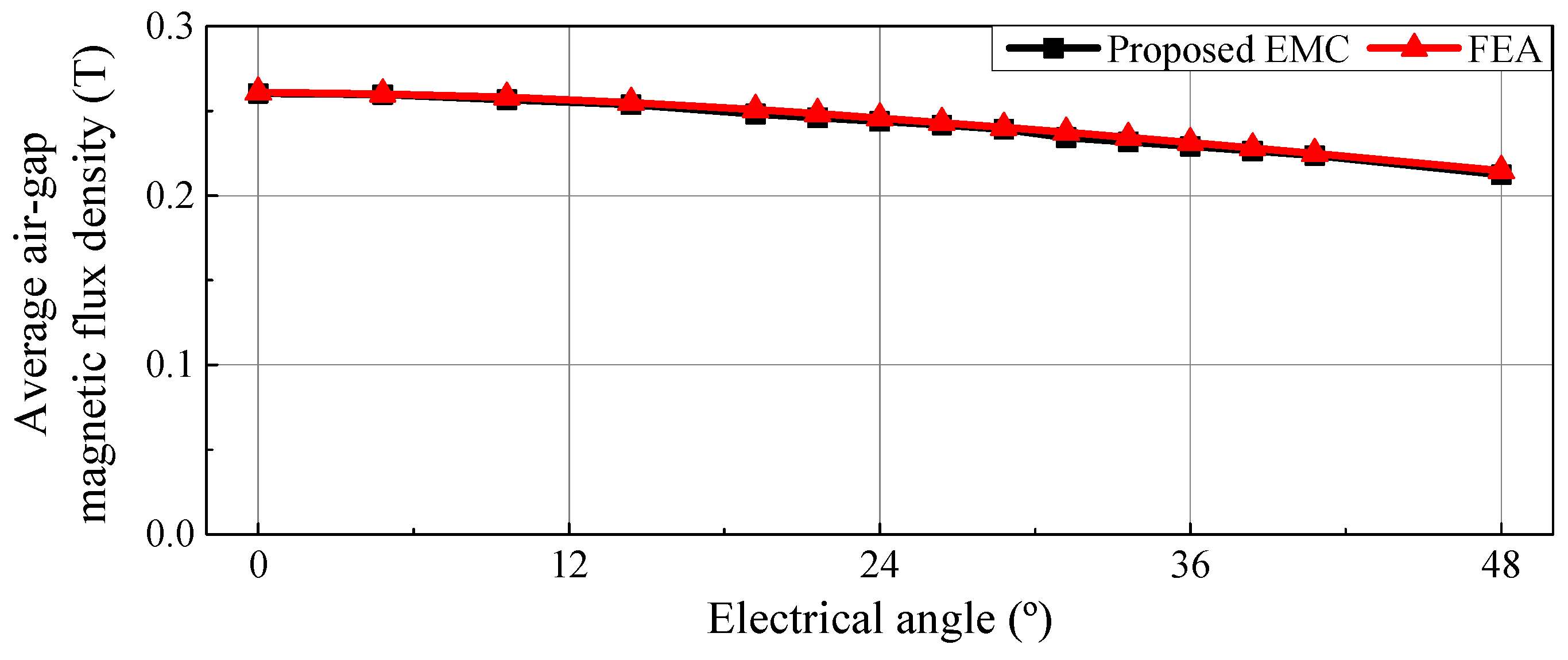
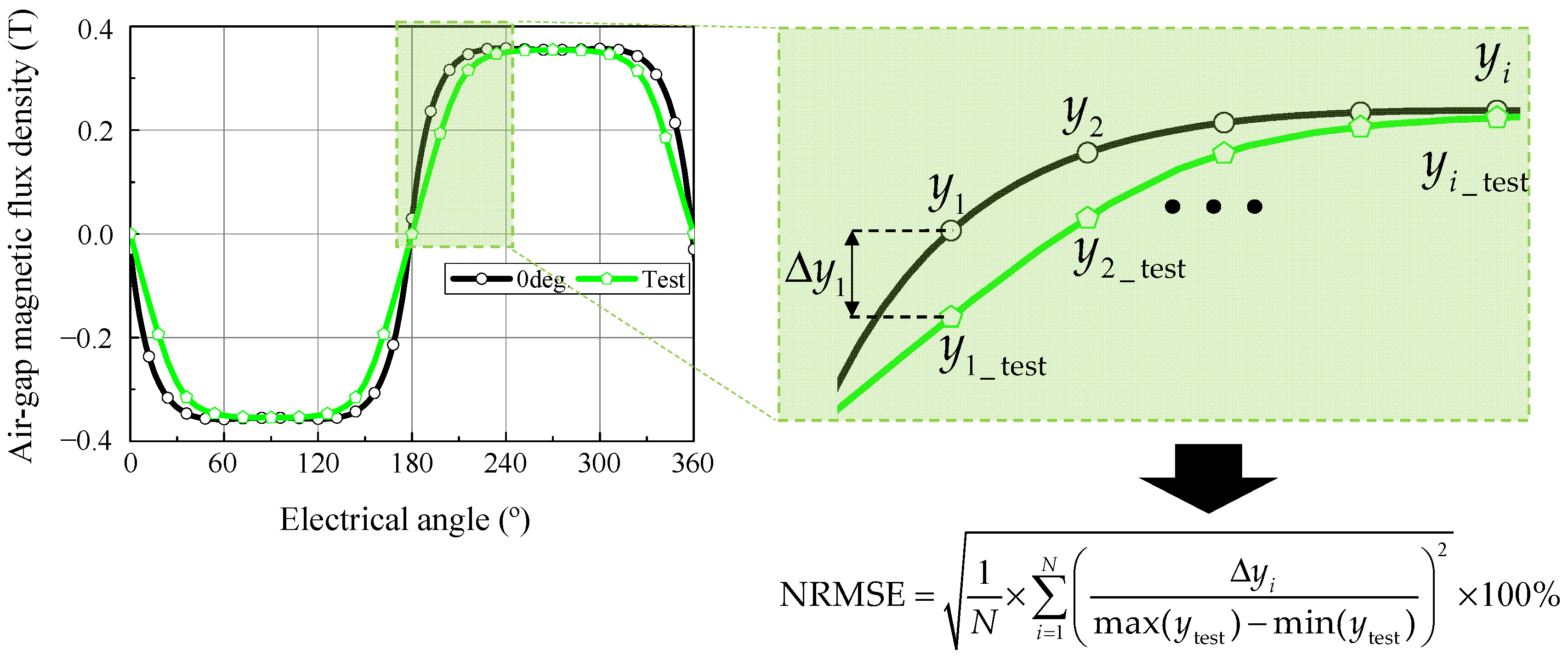
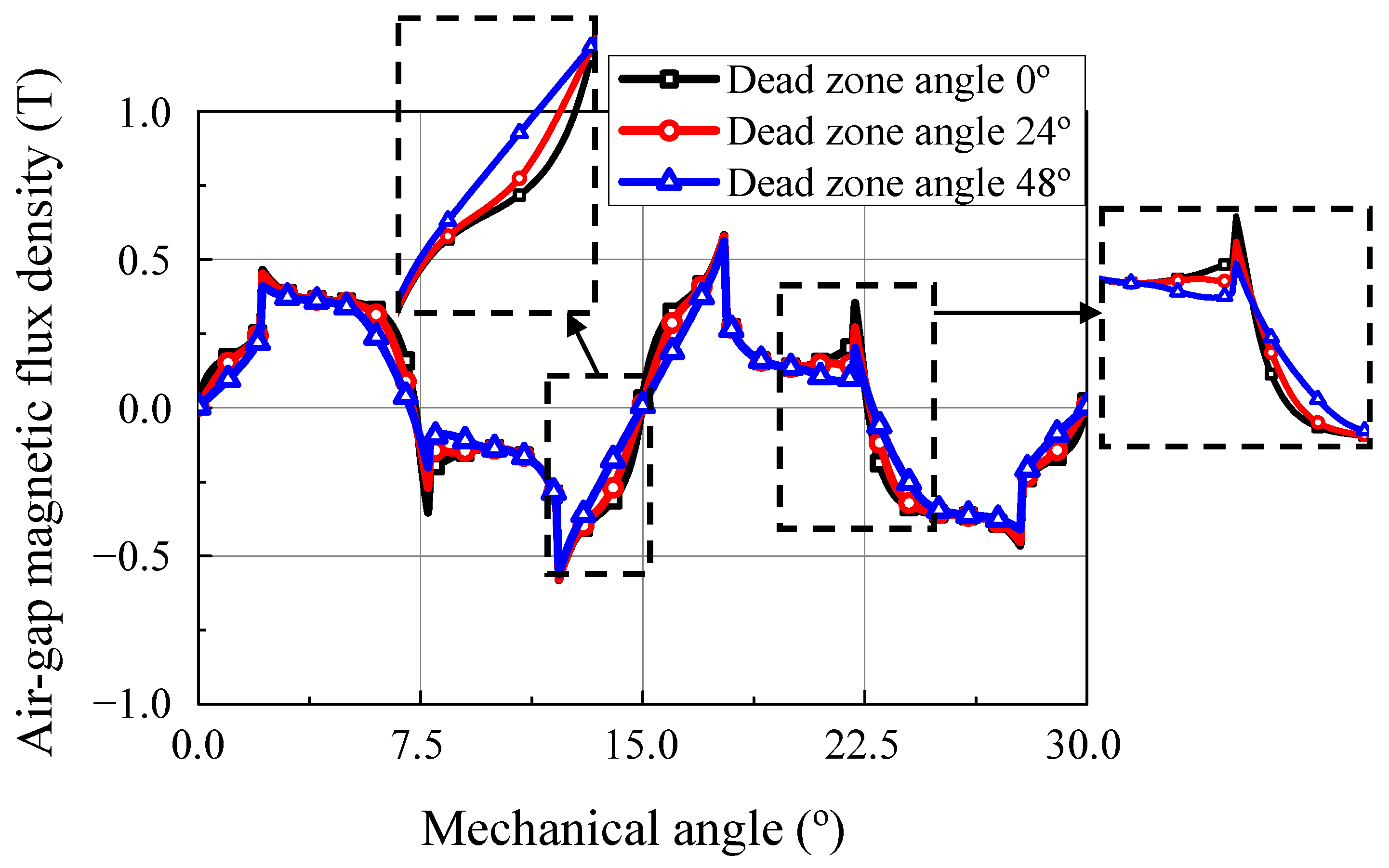
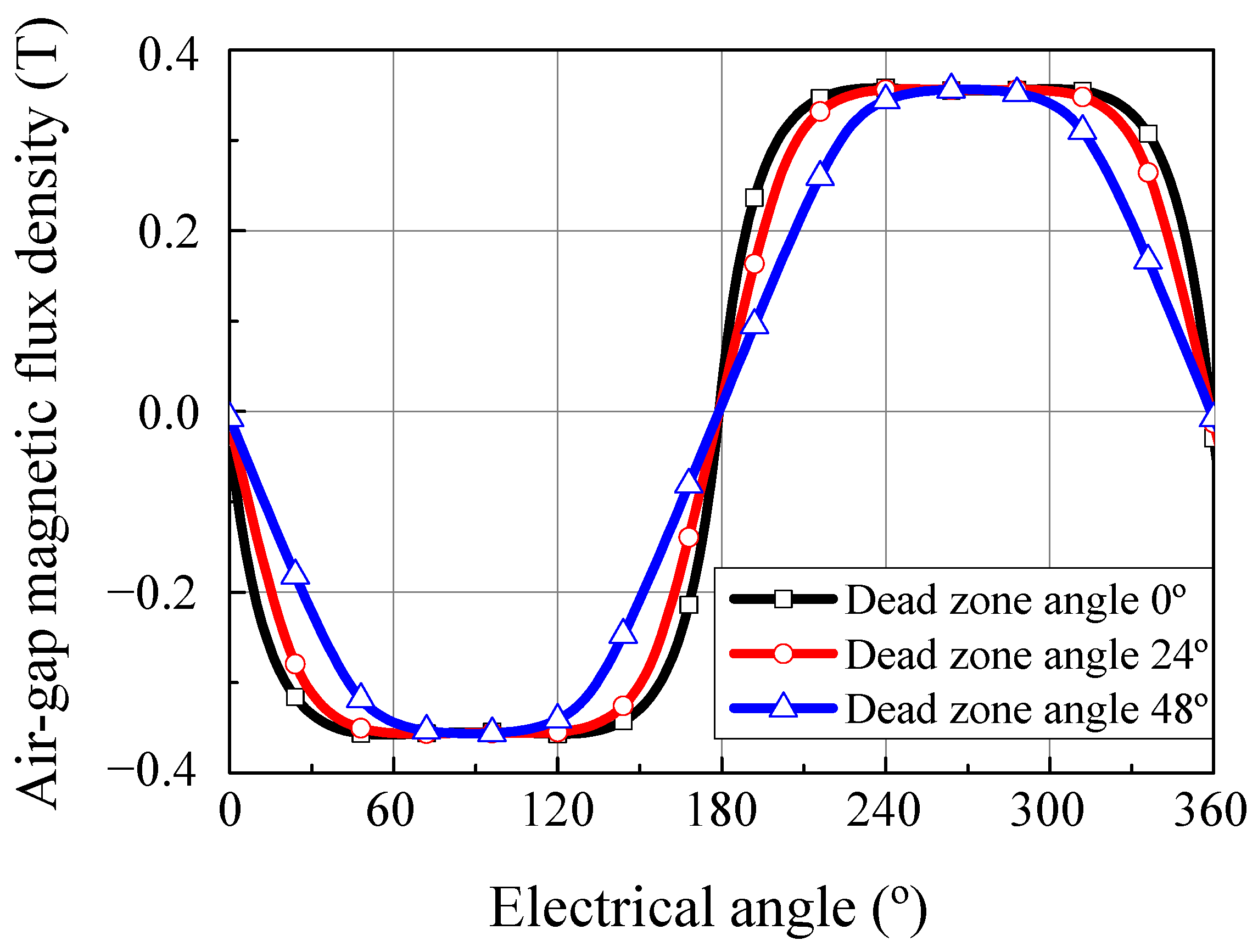
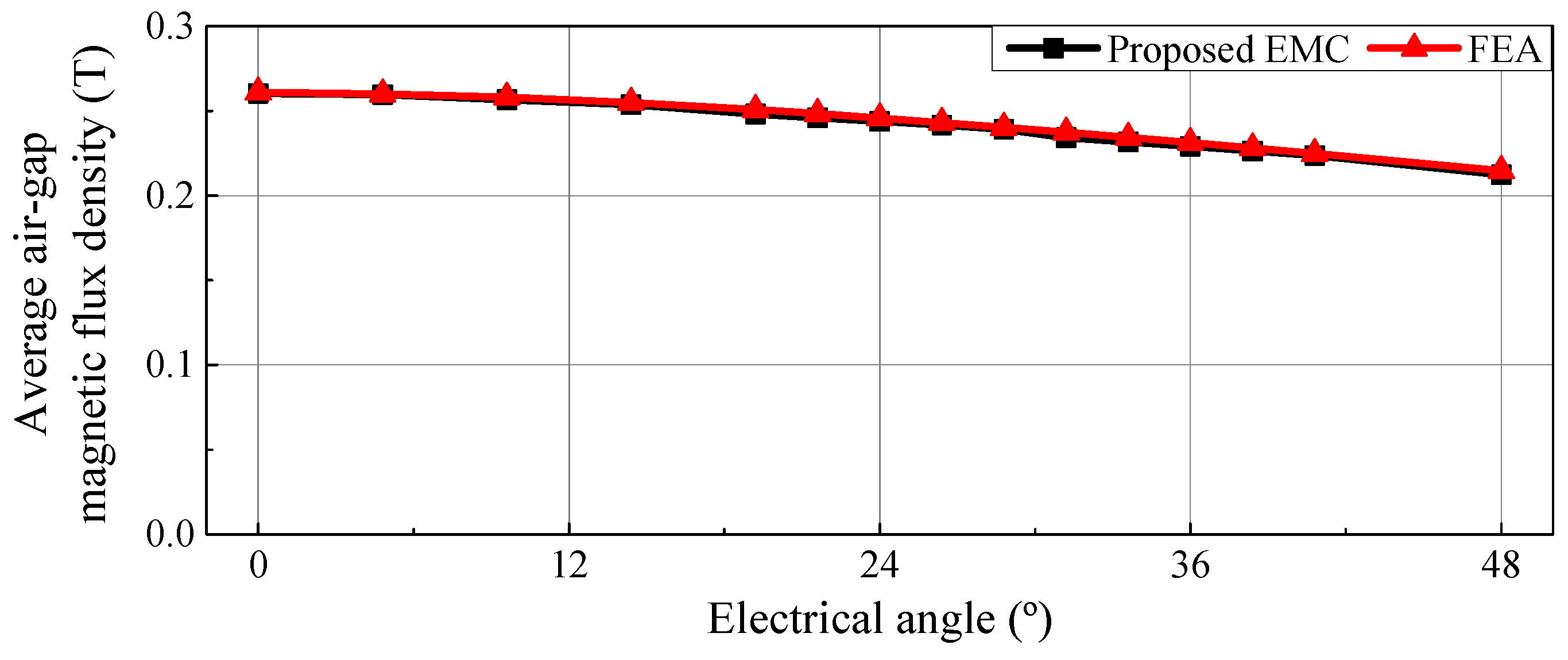
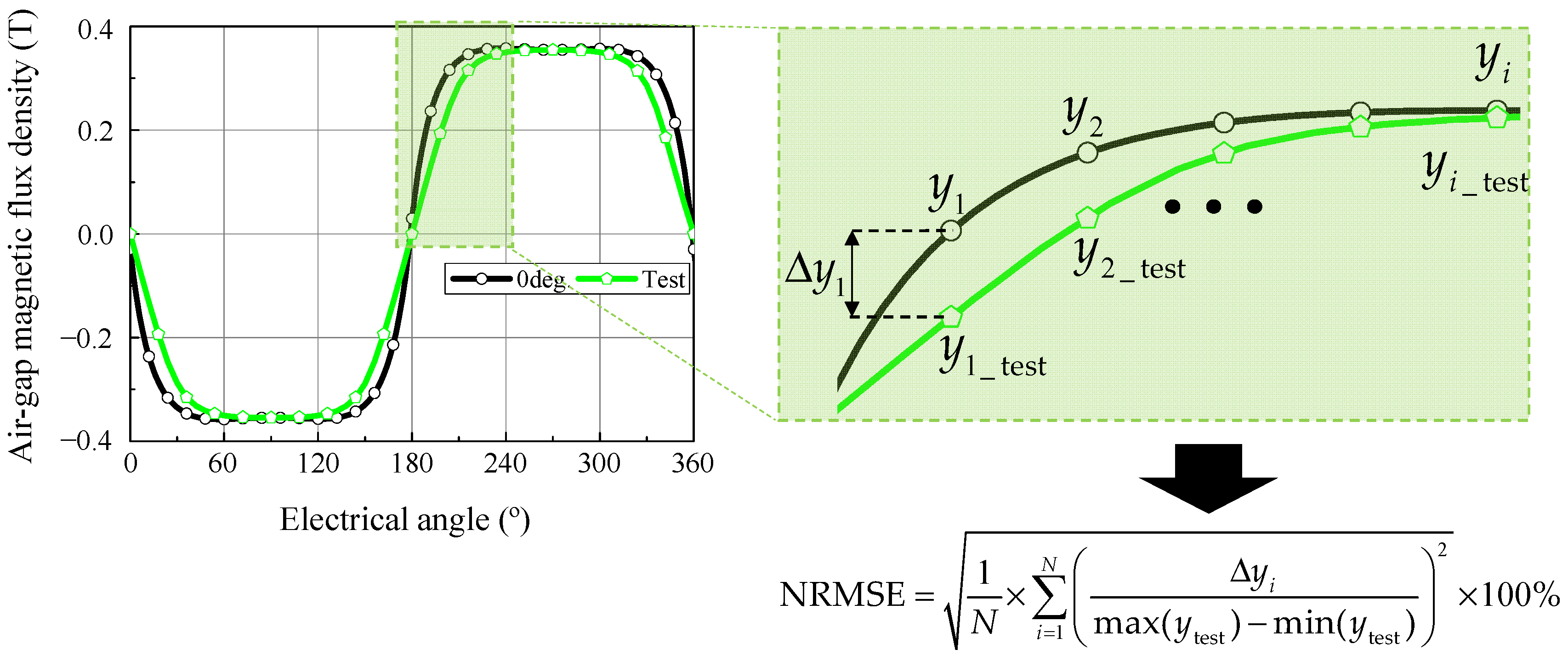
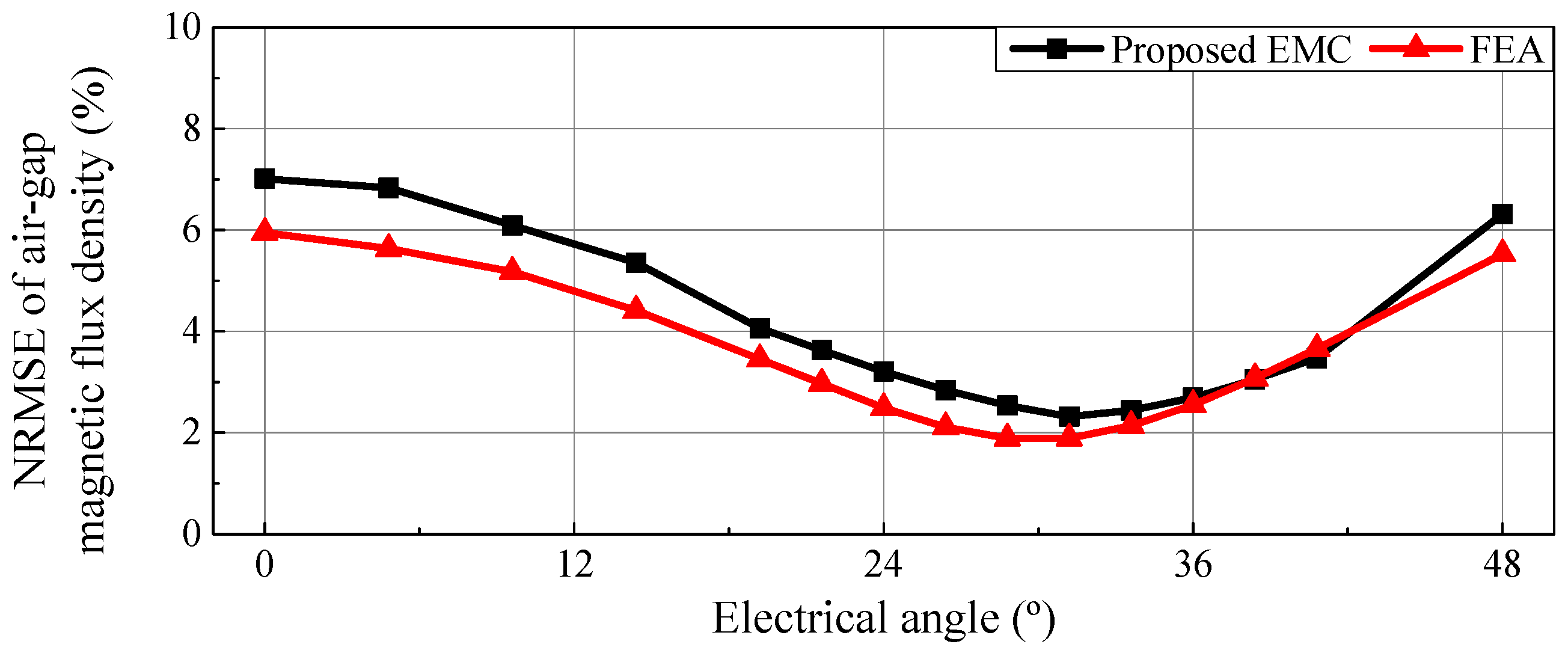
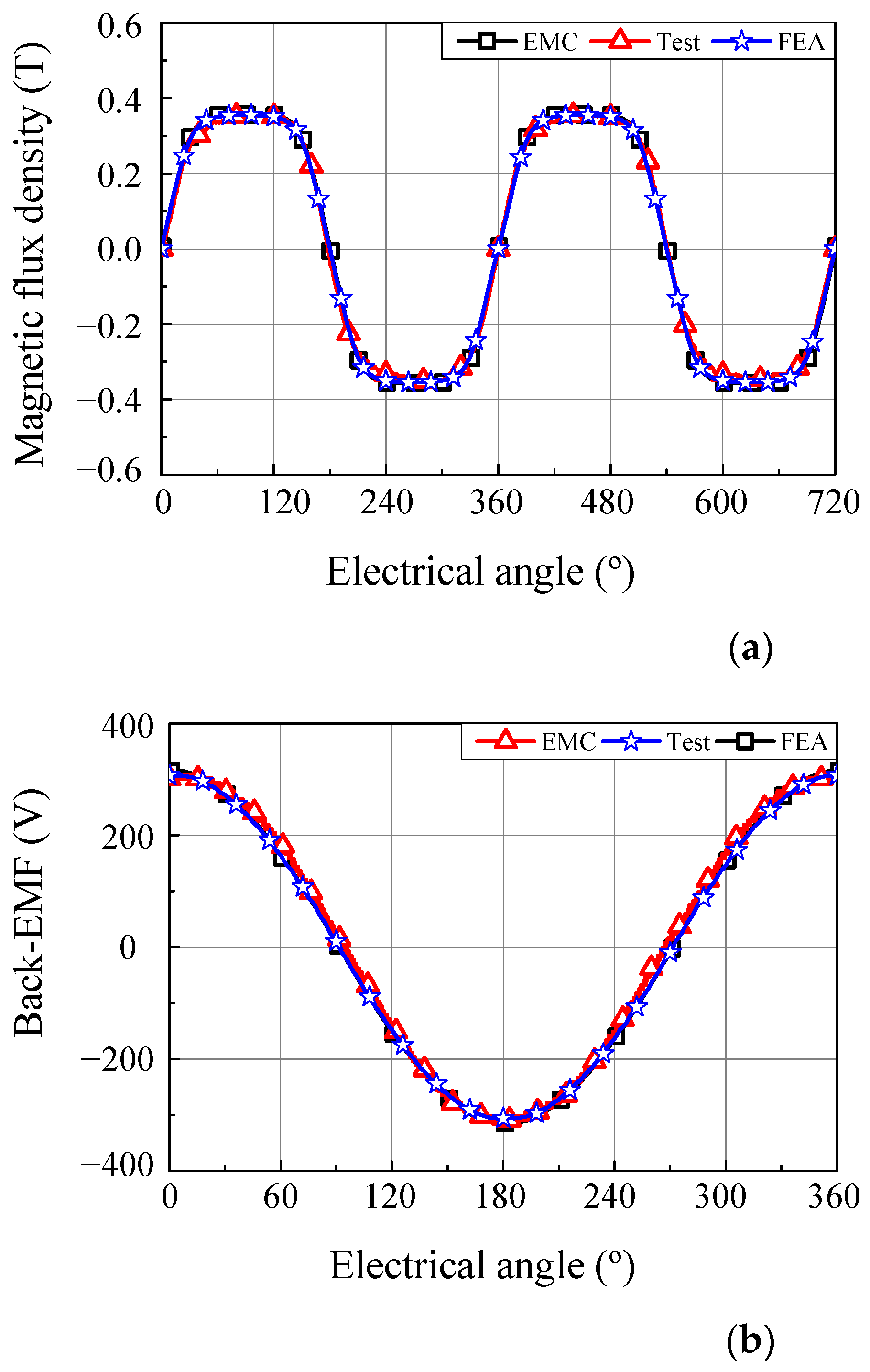
3.1. No-Load Air-Gap Magnetic Flux Density Distribution
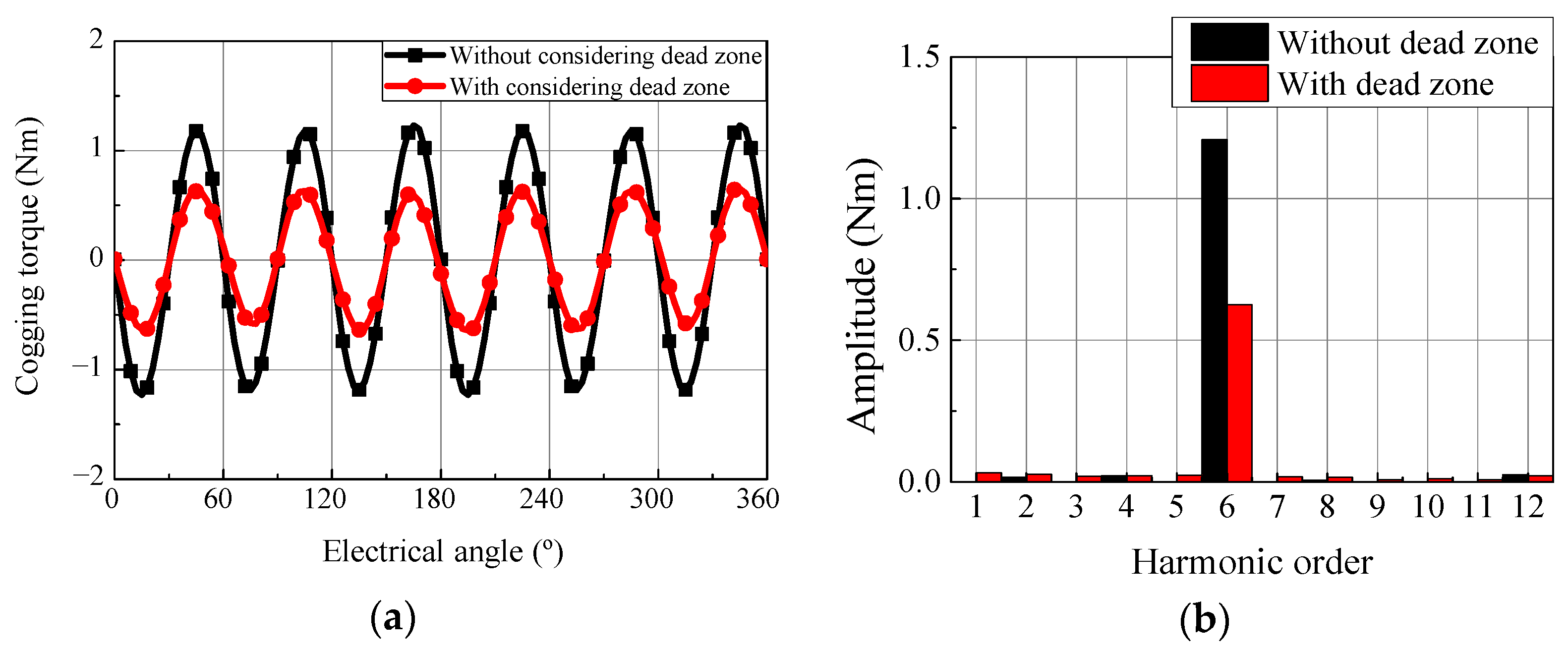
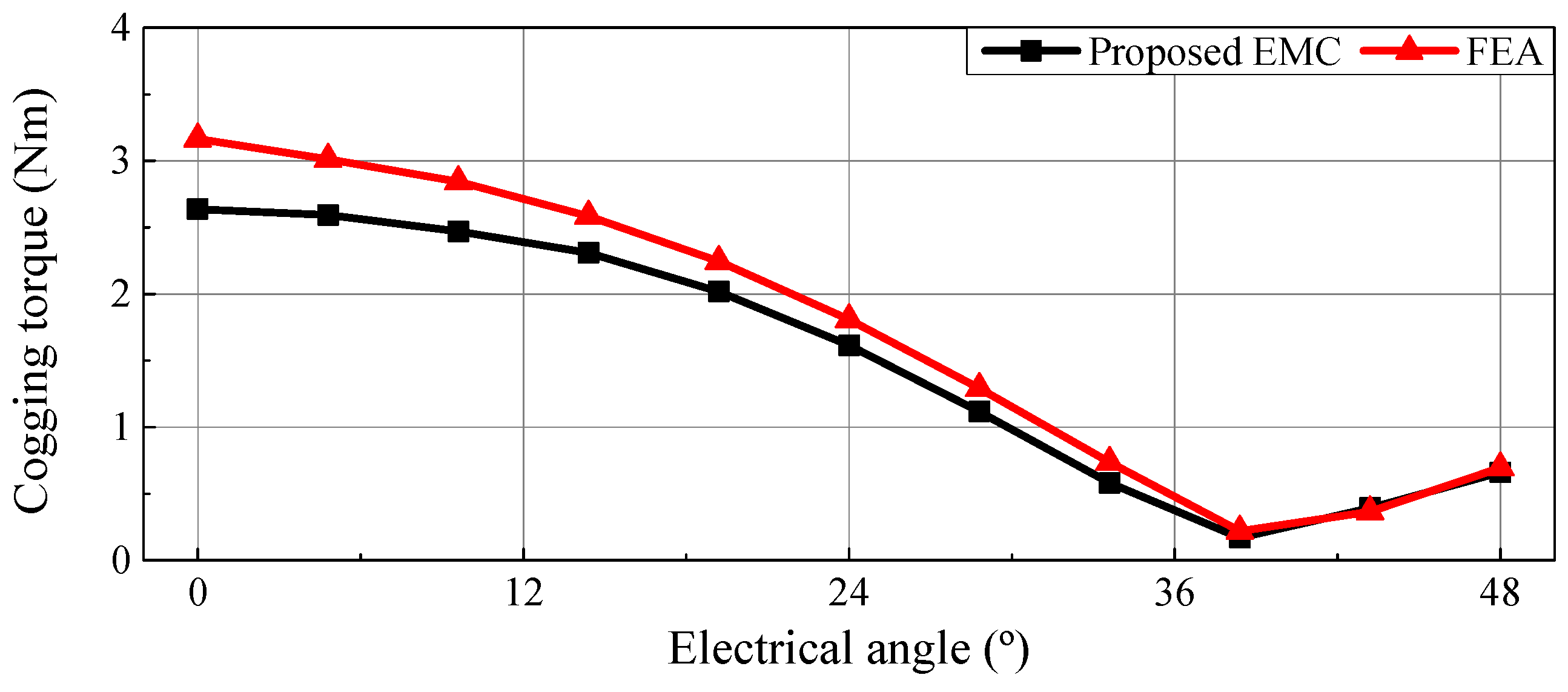
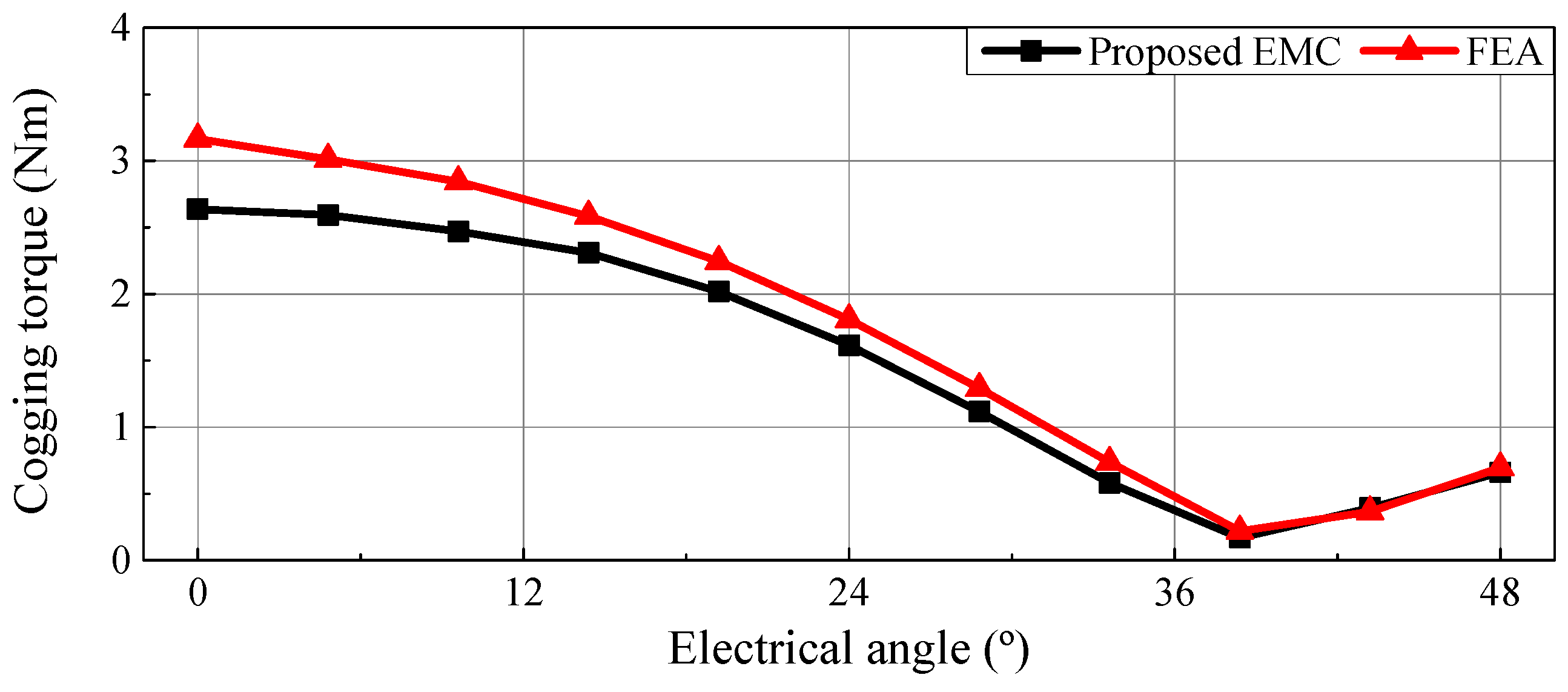
3.2. Cogging Torque
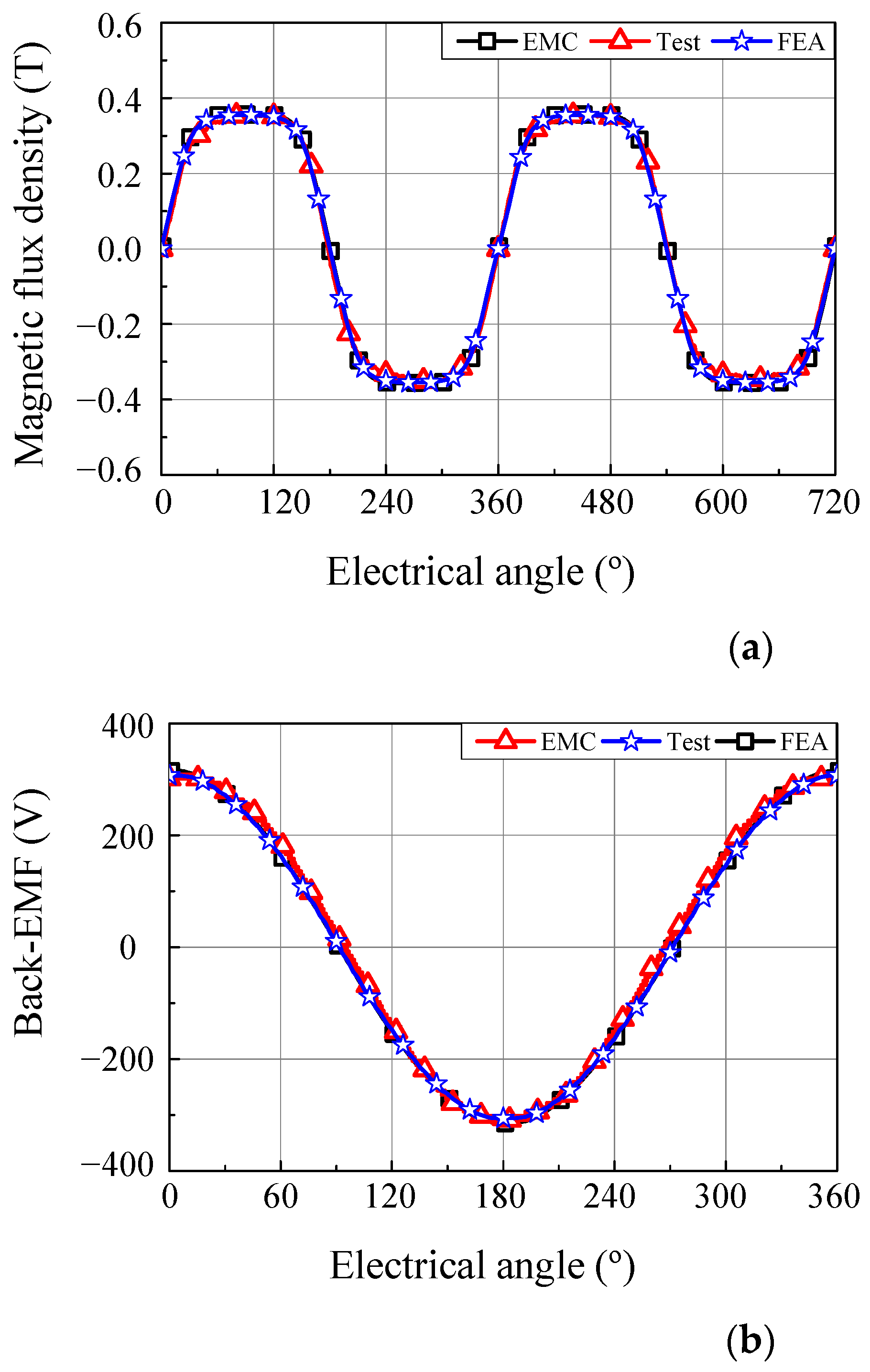
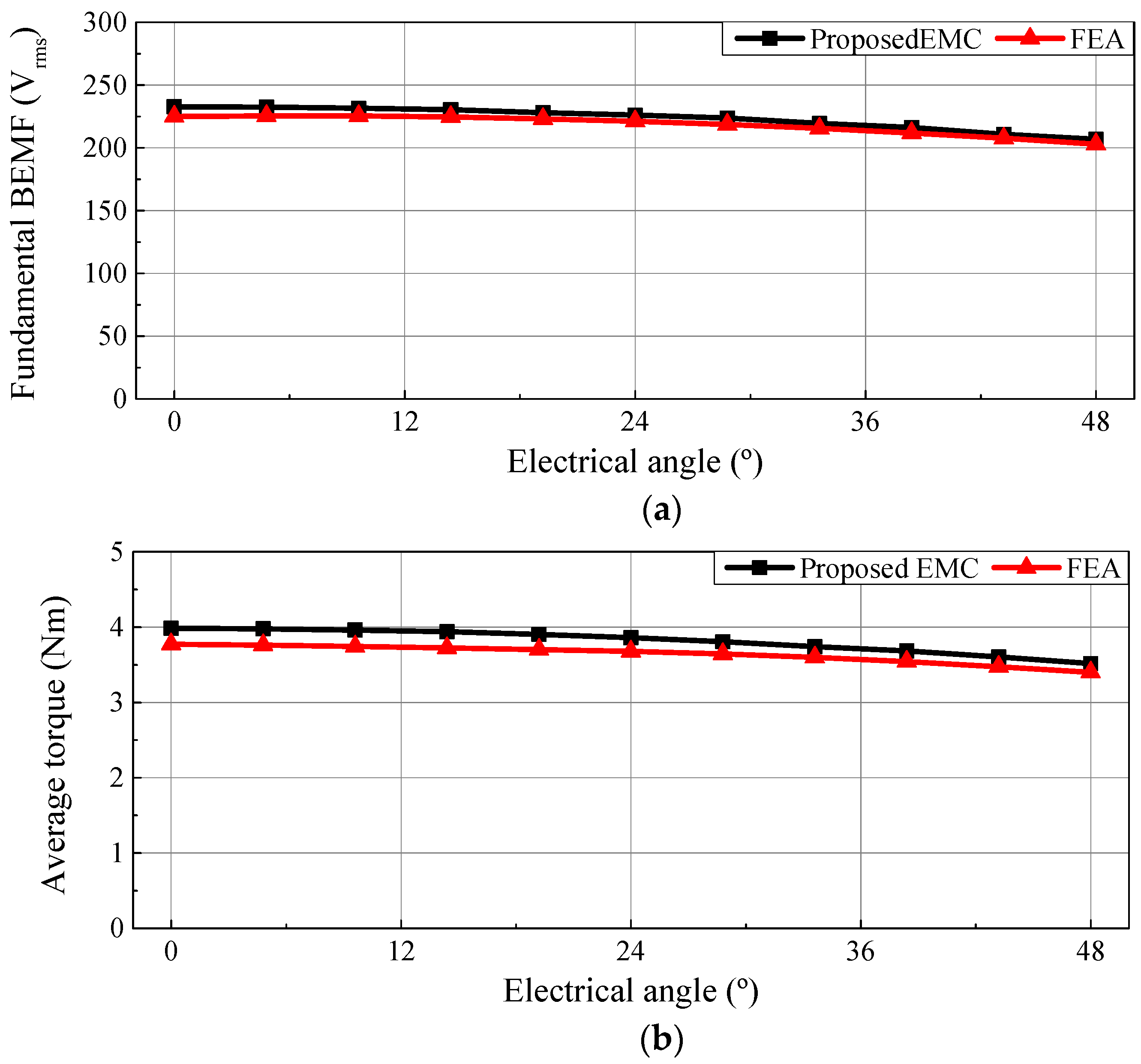
3.3. Back Electro-Motive Force and Average Torque
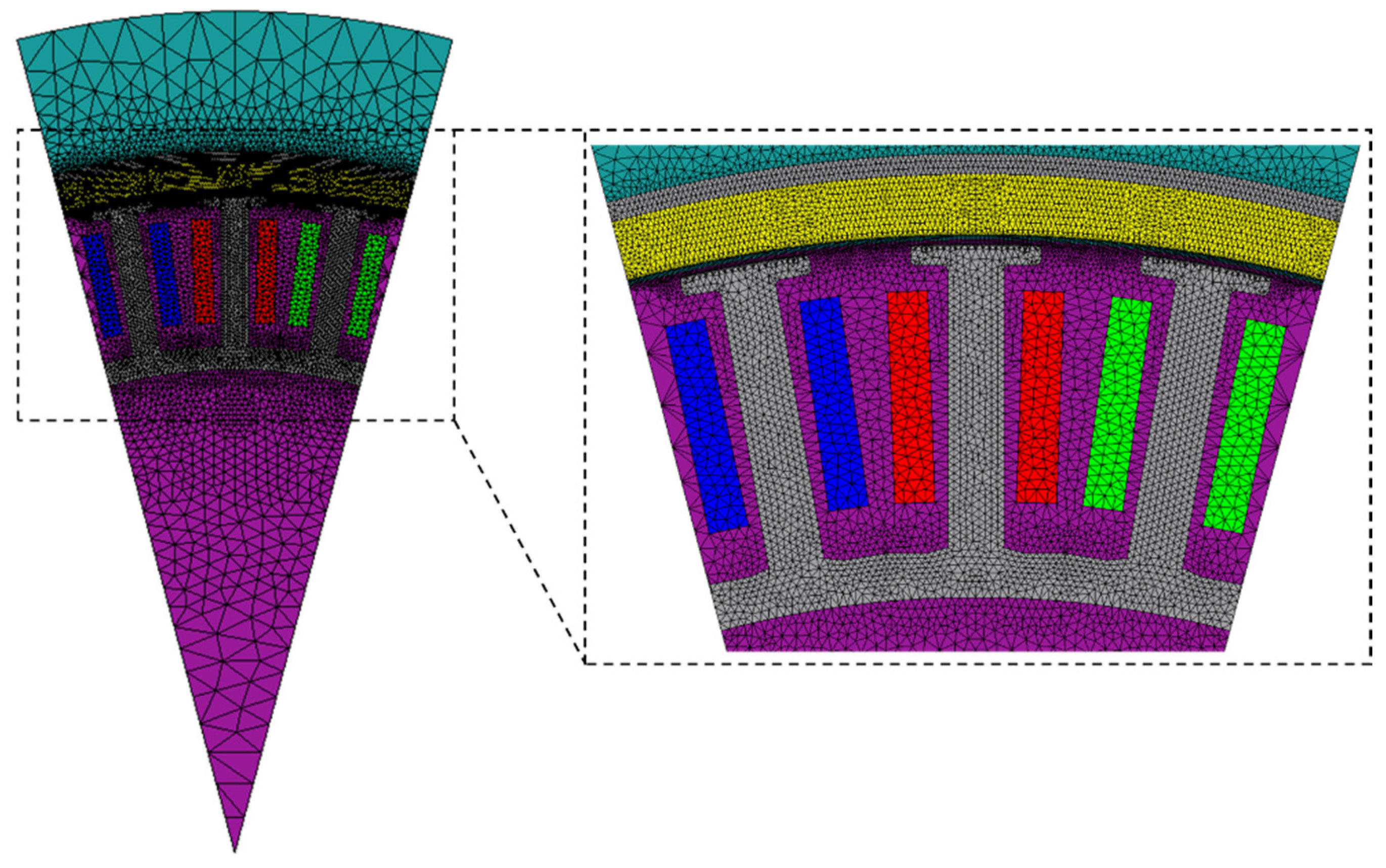
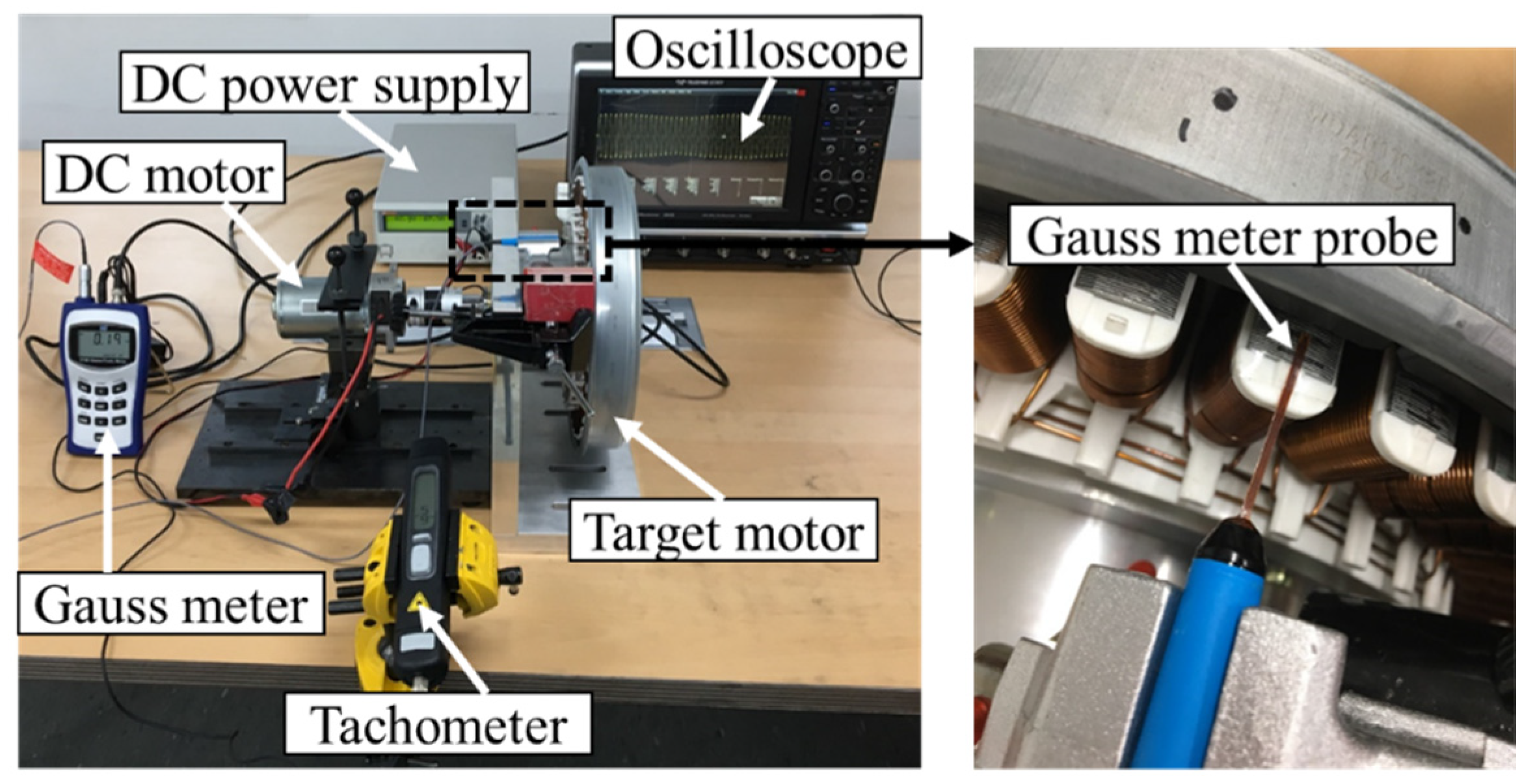
4. Verification
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lindth, P.M.; Jussila, H.K.; Niemela, M.; Paviainen, A.; Pyrhonen, J. Comparison of concentrated winding permanent magnet motors with embedded and surface-mounted rotor magnets. IEEE Trans. Magn. 2009, 45, 2085–2089. [Google Scholar] [CrossRef]
- Sun, X.; Hu, C.; Lei, G.; Yang, Z.; Guo, Y.; Zhu, J. Speed sensorless control of SPMSM drives for EVs with a binary search algorithm-based phase-locked loop. IEEE Trans. Veh. Technol. 2020, 69, 4968–4978. [Google Scholar] [CrossRef]
- Toloue, S.F.; Kamali, S.H.; Moallem, M. Torque ripple minimization and control of a permanent magnet synchronous motor using multiobjective extremum seeking. IEEE/ASME Trans. Mechatron. 2019, 24, 2151–2160. [Google Scholar] [CrossRef]
- Gundabattini, E.; Mystkowski, A.; Idzkowski, A.; R., R.S.; Solomon, D.G. Thermal mapping of a high-speed electric motor used for traction applications and analysis of various cooling methods—A Review. Energies 2021, 14, 1472. [Google Scholar] [CrossRef]
- Chin, J.W.; Cha, K.S.; Park, M.R.; Park, S.H.; Lee, E.C.; Lim, M.S. High efficiency PMSM with high slot fill factor coil for heavy-duty EV traction considering AC resistance. IEEE Trans. Energy Convers. 2021, 36, 883–894. [Google Scholar] [CrossRef]
- Park, S.H.; Park, J.C.; Hwang, S.W.; Kim, J.H.; Park, H.J.; Lim, M.S. Suppression of torque ripple caused by misalignment of the gearbox by using harmonic current injection method. IEEE/ASME Trans. Mechatron. 2020, 25, 1990–1999. [Google Scholar] [CrossRef]
- Park, S.H.; Park, J.C.; Hwang, S.W.; Kim, J.H.; Lim, M.S. Model predictive control for torque ripple suppression caused by misalignment of the gearbox. IEEE Trans. Energy Convers. 2021, 36, 1517–1527. [Google Scholar] [CrossRef]
- Hur, J.; Hyun, D.S.; Hong, J.P. A method for reduction cogging torque in brushless DC motor considering the distribution of magnetization by 3DEMCN. IEEE Trans. Magn. 1998, 34, 3532–3535. [Google Scholar]
- Raghu, C.S.; Babu, A.; Kirk, W.H.; Paul, J.V.; Nimitkumar, K.S. Comparison of two magnetizing fixture designs to achieve radial magnetization profile for isotropic-bonded neo magnets. IEEE Trans. Magn. 2018, 54, 1–4. [Google Scholar]
- Yoon, T.; Lieu, D.K. A method to verify accuracy of predicted magnetic orientation of a permanent magnet in a brushless DC motor. IEEE Trans. Magn. 2007, 43, 3638–3644. [Google Scholar] [CrossRef]
- Okamoto, Y.; Nakamura, N.; Osanai, K.; Doi, S.; Aoki, T.; Okazaki, K. Diagnosis method of magnetization distribution in permanent magnet using approximate function based on 1-D fourier series expansion. IEEE Trans. Magn. 2019, 55, 1–4. [Google Scholar] [CrossRef]
- Xu, G.H.; Liu, G.H.; Jiang, S.; Chen, Q. Analysis of a hybrid rotor permanent magnet motor based on equivalent magnetic network. IEEE Trans. Magn. 2018, 54, 1–9. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, Z.R.; Geng, W.W.; Li, J.C. A simplified finite-element model of hybrid excitation synchronous machines with radial/axial flux paths via magnetic equivalent circuit. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Yeo, H.; Lim, D.; Jung, H. Magnetic equivalent circuit model considering the overhang structure of an interior permanent-magnet machine. IEEE Trans. Magn. 2019, 55, 1–4. [Google Scholar] [CrossRef]
- Wu, L.J.; Huang, X.; Zhong, Y.; Fang, Y.; Zhu, Z.Q. A hybrid field model for open-circuit field prediction in surface-mounted PM machines considering saturation. IEEE Trans. Magn. 2018, 54, 1–12. [Google Scholar] [CrossRef]
- Manju Bhashini, R.; Ragavan, K. Magnetic equivalent circuit for surface-mounted PM motor. In Proceedings of the 2018 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Madras, India, 18–21 December 2018. [Google Scholar]
- Haschen, E.; Ponick, B. Calculation of slot leakage flux using equivalent magnetic circuits. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020. [Google Scholar]
- Lim, S.; Izui, K.; Nishiwaki, S.; Hong, J.P.; Min, S. Magnetising fixture design for optimal magnetization orientation of ring-type magnet in surface-mounted permanent magnet motor. IET Electr. Power Appl. 2018, 12, 1344–1349. [Google Scholar] [CrossRef]
- Liu, G.H.; Ding, L.; Zhao, W.X.; Chen, Q.; Jiang, S. Nonlinear equivalent magnetic network of a linear permanent magnet vernier machine with end effect consideration. IEEE Trans. Magn. 2018, 54, 1–9. [Google Scholar] [CrossRef]
- Sim, J.H.; Ahn, D.G.; Kim, D.Y.; Hong, J.P. Three-dimensional equivalent magnetic circuit network method for precise and fast analysis of PM-assisted claw-pole synchronous motor. IEEE Trans. Ind. Appl. 2018, 54, 160–171. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Unit | Values |
|---|---|---|
| Motor type | - | External rotor SPMSM |
| Number of poles | - | 48 |
| Number of slots | - | 36 |
| Number of phases | - | 3 |
| Permanent magnet type | - | Ferrite |
| Residual magnetic flux density | T | 0.42 |
| Dead zone angle | electrical degree | 0 to 48 |
| Rated torque | Nm | 3.8 |
| Rated phase current | Arms | 3.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.-H.; Cha, K.-S.; Hwang, S.-W.; Lee, S.-G.; Park, M.-R.; Yoon, Y.-D.; Lim, M.-S. Analysis of Effect of the Magnetization Distribution of Multi-Pole PM on SPMSM Performance Using Equivalent Magnetic Circuit Considering Dead Zone. Energies 2021, 14, 3279. https://doi.org/10.3390/en14113279
Kim J-H, Cha K-S, Hwang S-W, Lee S-G, Park M-R, Yoon Y-D, Lim M-S. Analysis of Effect of the Magnetization Distribution of Multi-Pole PM on SPMSM Performance Using Equivalent Magnetic Circuit Considering Dead Zone. Energies. 2021; 14(11):3279. https://doi.org/10.3390/en14113279
Chicago/Turabian StyleKim, Jae-Hyun, Kyoung-Soo Cha, Sung-Woo Hwang, Soo-Gyung Lee, Min-Ro Park, Young-Doo Yoon, and Myung-Seop Lim. 2021. "Analysis of Effect of the Magnetization Distribution of Multi-Pole PM on SPMSM Performance Using Equivalent Magnetic Circuit Considering Dead Zone" Energies 14, no. 11: 3279. https://doi.org/10.3390/en14113279
APA StyleKim, J.-H., Cha, K.-S., Hwang, S.-W., Lee, S.-G., Park, M.-R., Yoon, Y.-D., & Lim, M.-S. (2021). Analysis of Effect of the Magnetization Distribution of Multi-Pole PM on SPMSM Performance Using Equivalent Magnetic Circuit Considering Dead Zone. Energies, 14(11), 3279. https://doi.org/10.3390/en14113279