
Wind Turbine Tower Deformation Measurement Using Terrestrial Laser Scanning on a 3.4 MW Wind Turbine



Abstract
1. Introduction
2. Measurement Principle and Methodology
2.1. Measurement Principle of the Laser Scanner
2.2. Methodology
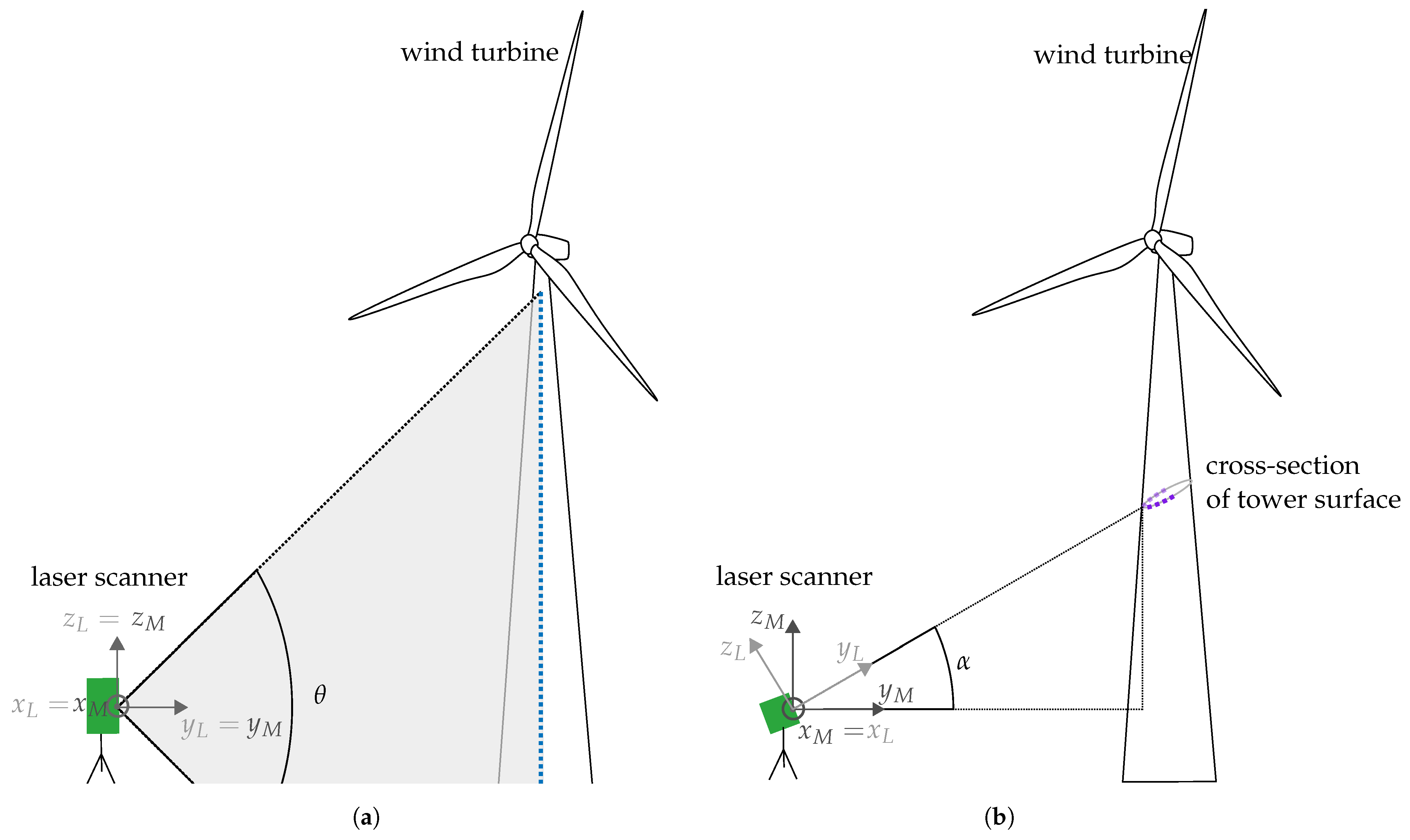
2.2.1. Vertical Laser Alignment
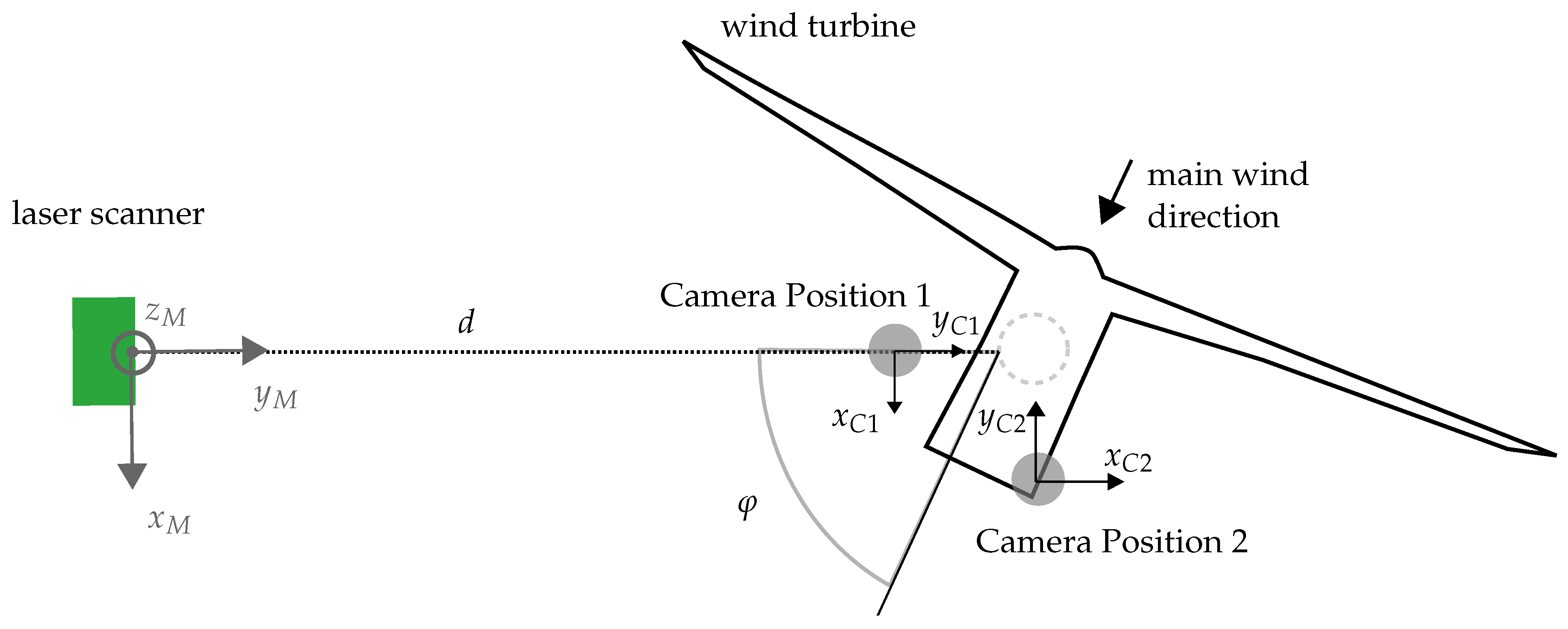
2.2.2. Horizontal Laser Alignment
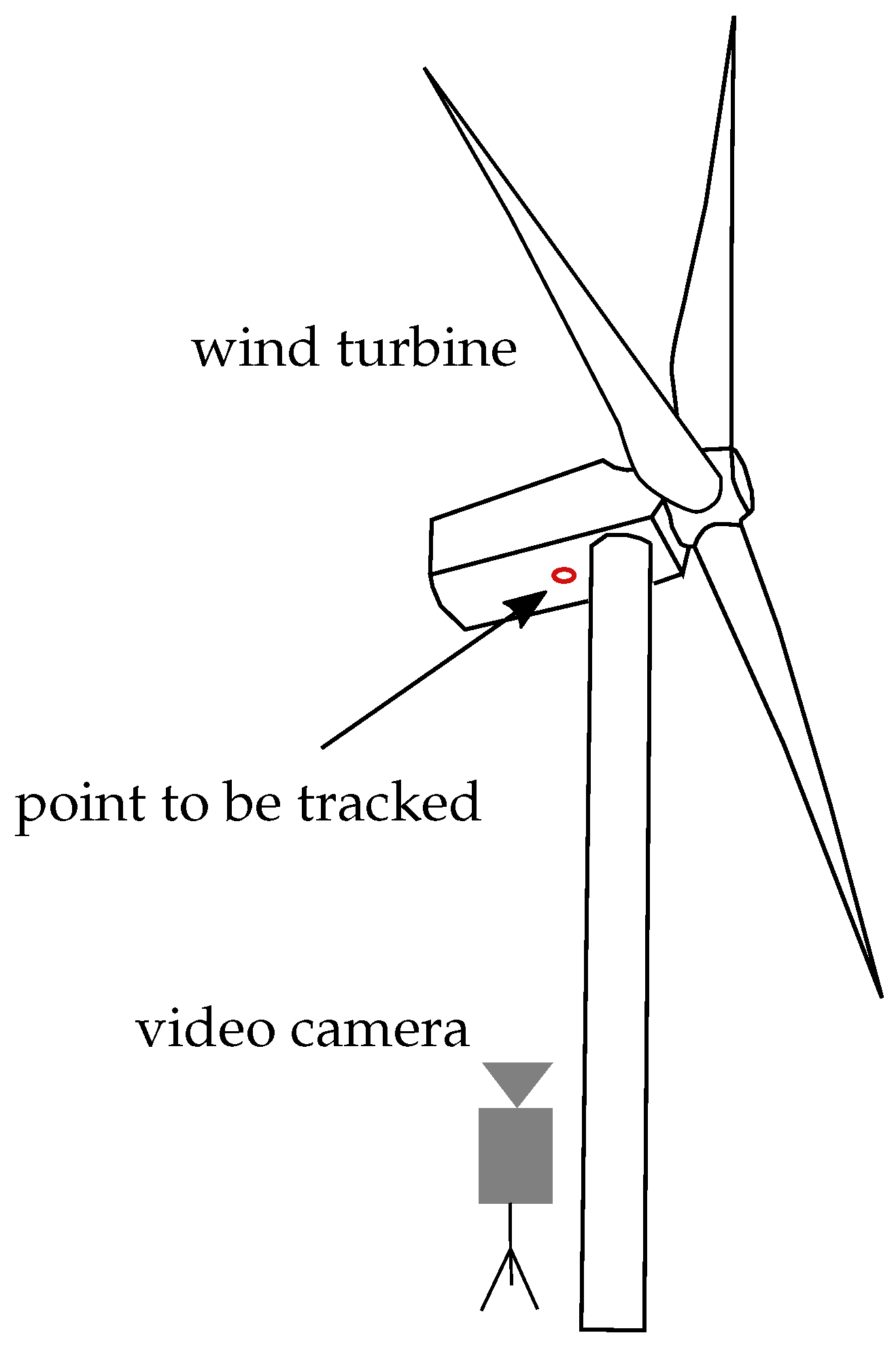
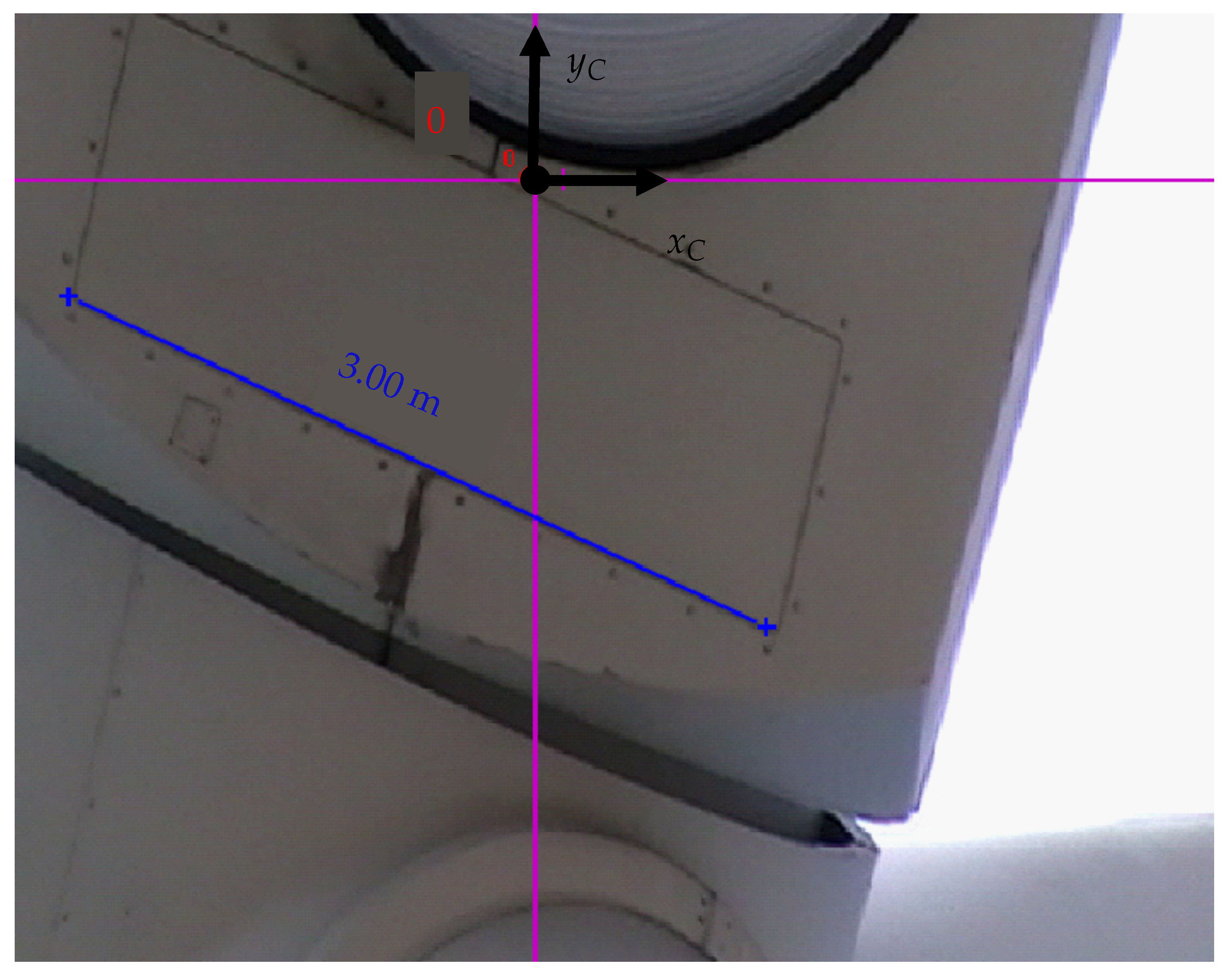
2.2.3. Reference Measurement for Tower Movement Using a Video Camera
3. Experimental Setup
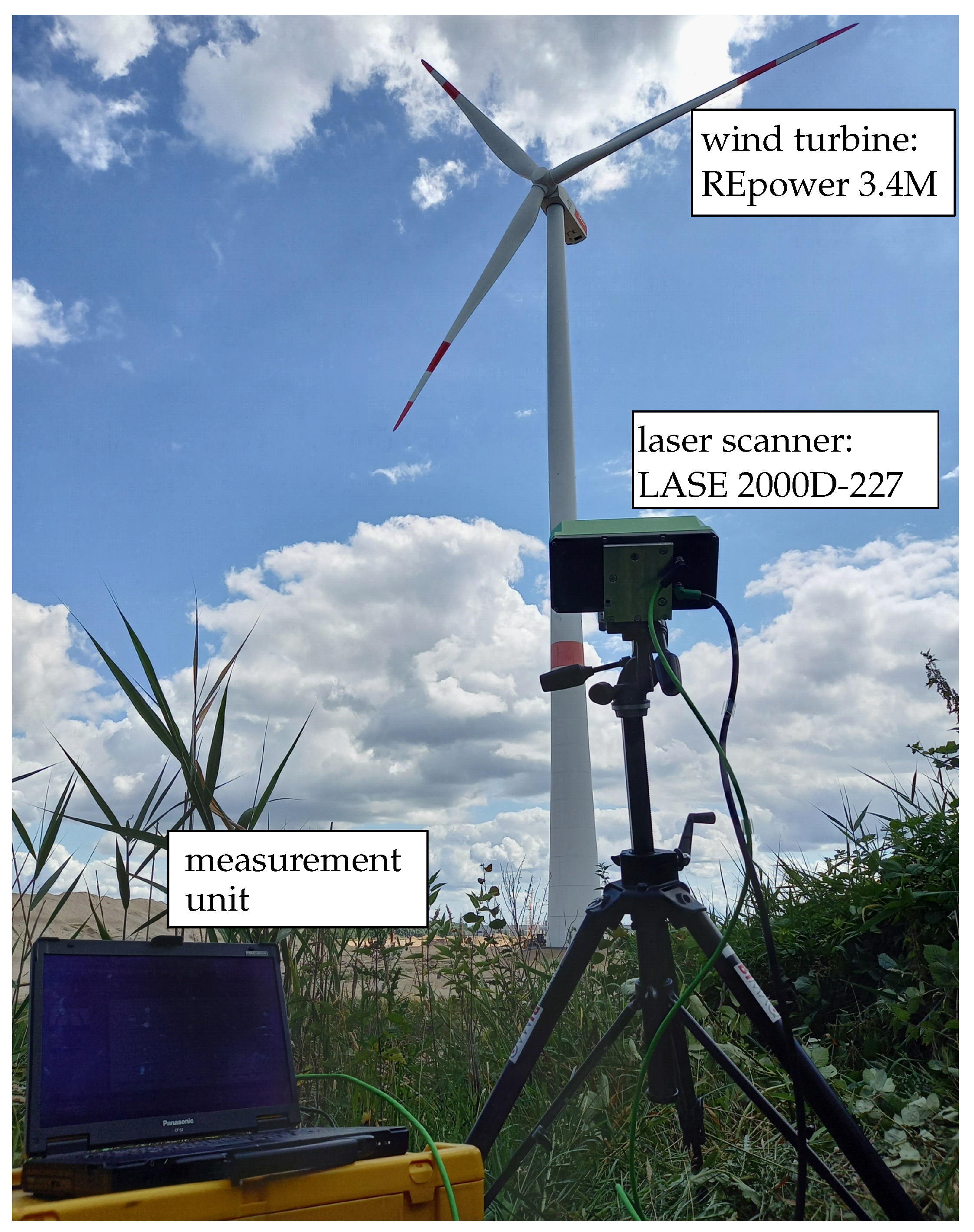
3.1. Measurement Object
3.2. Measurement System and Setup
3.3. Measurement Conditions
3.3.1. Vertical Scanner Alignment
3.3.2. Horizontal Scanner Alignment
4. Results
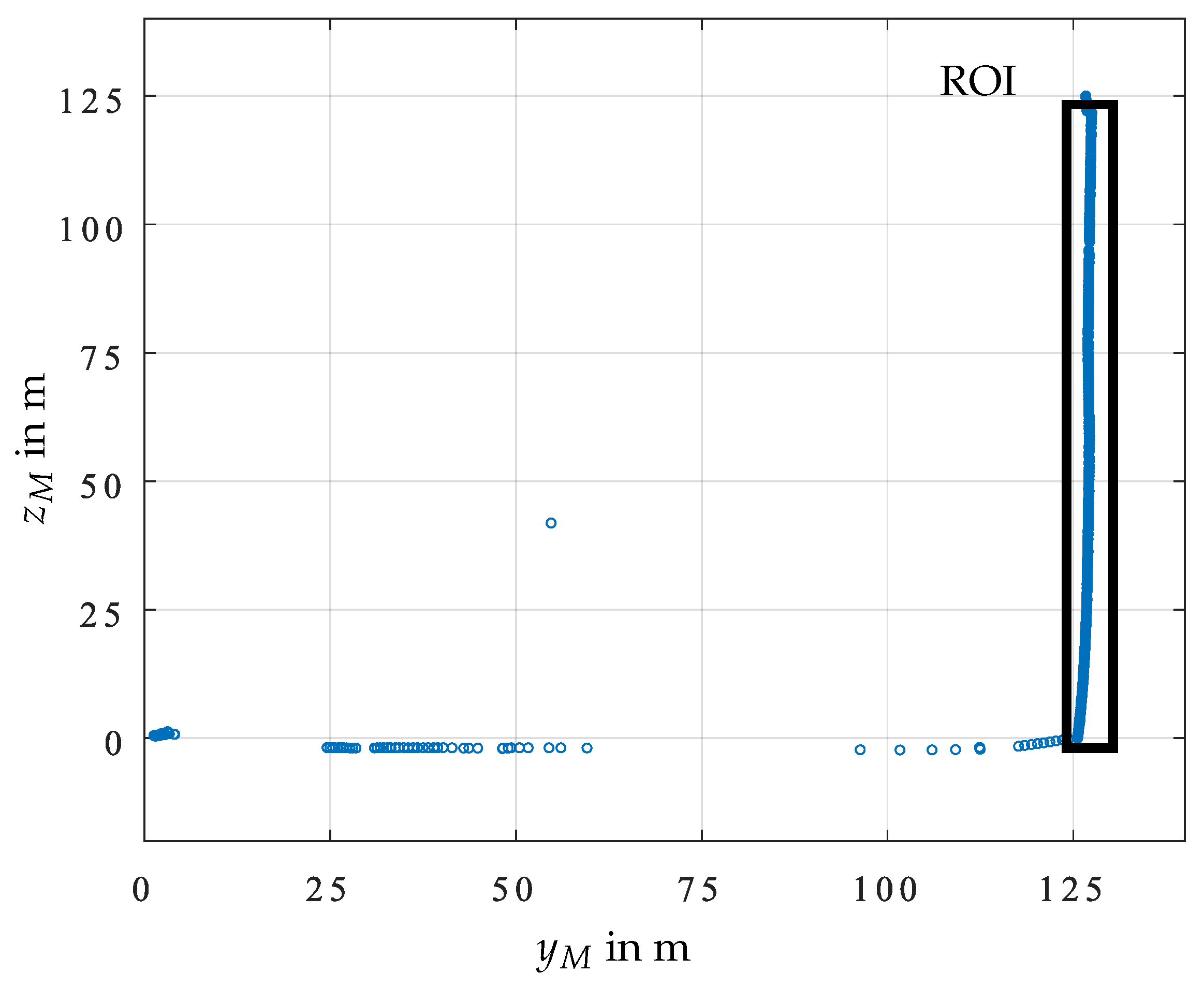
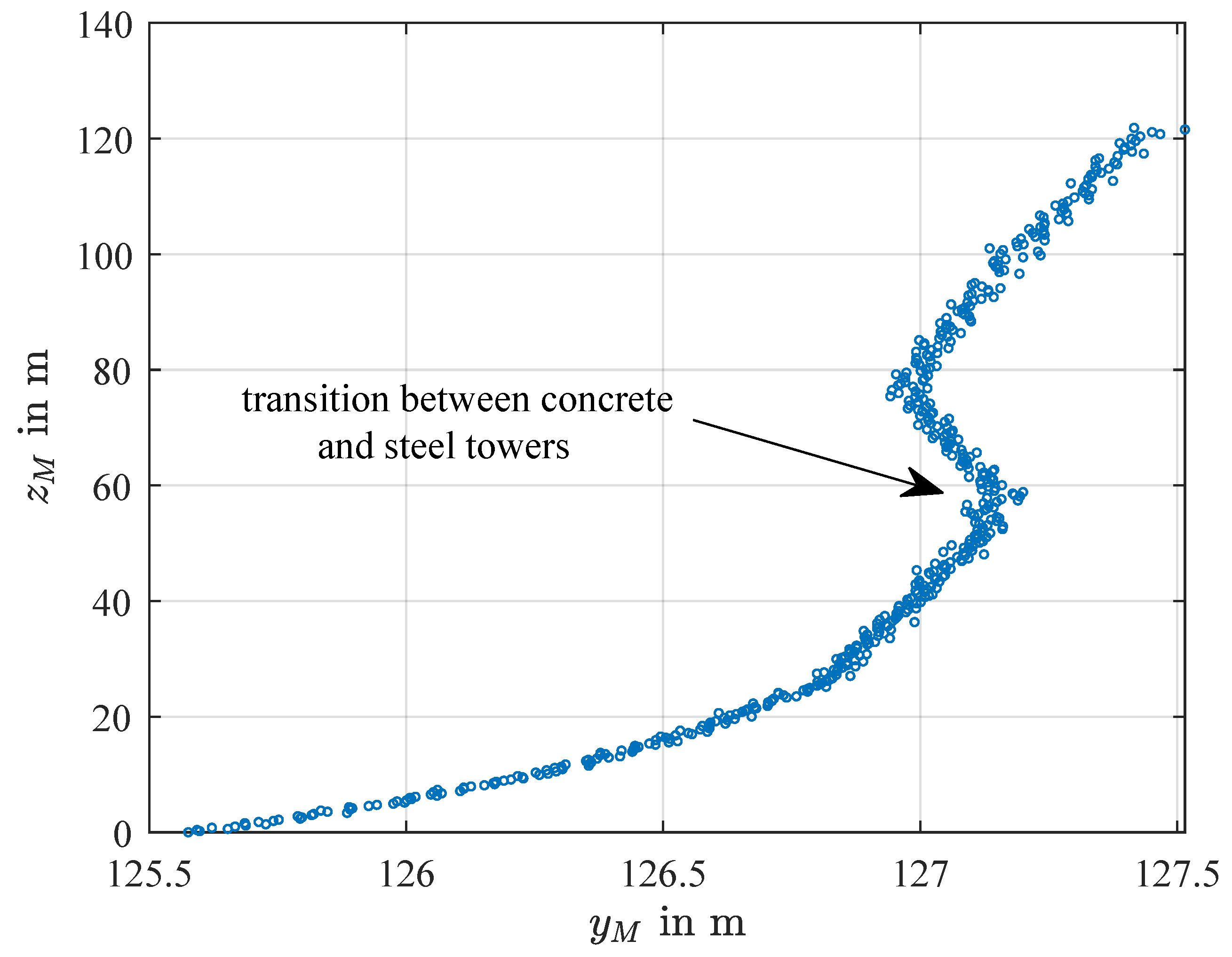
4.1. Vertical Scanner Alignment: Contour Line
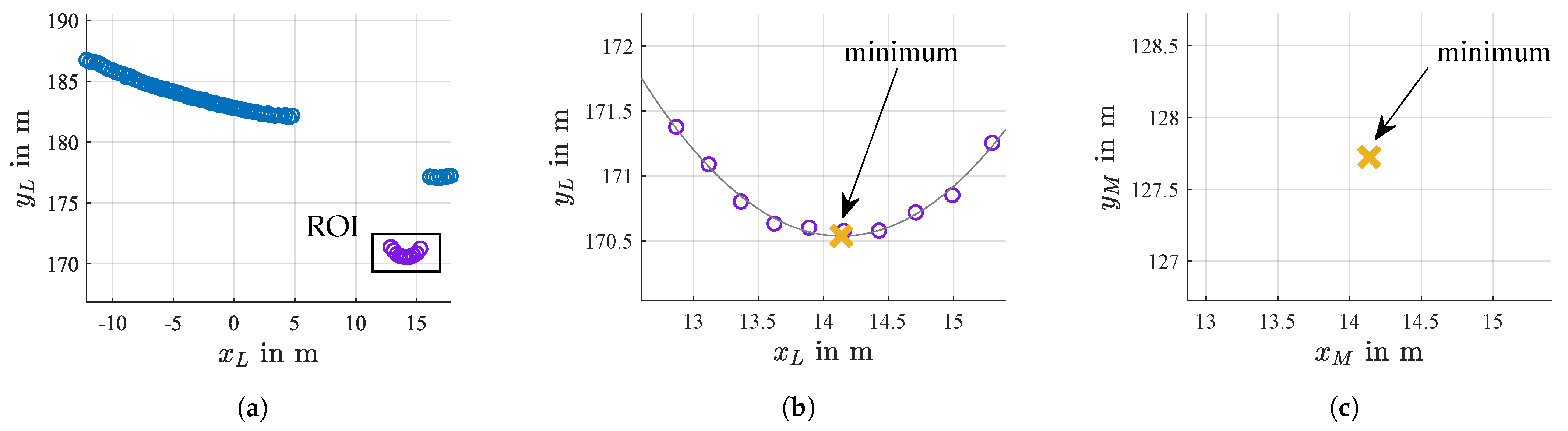
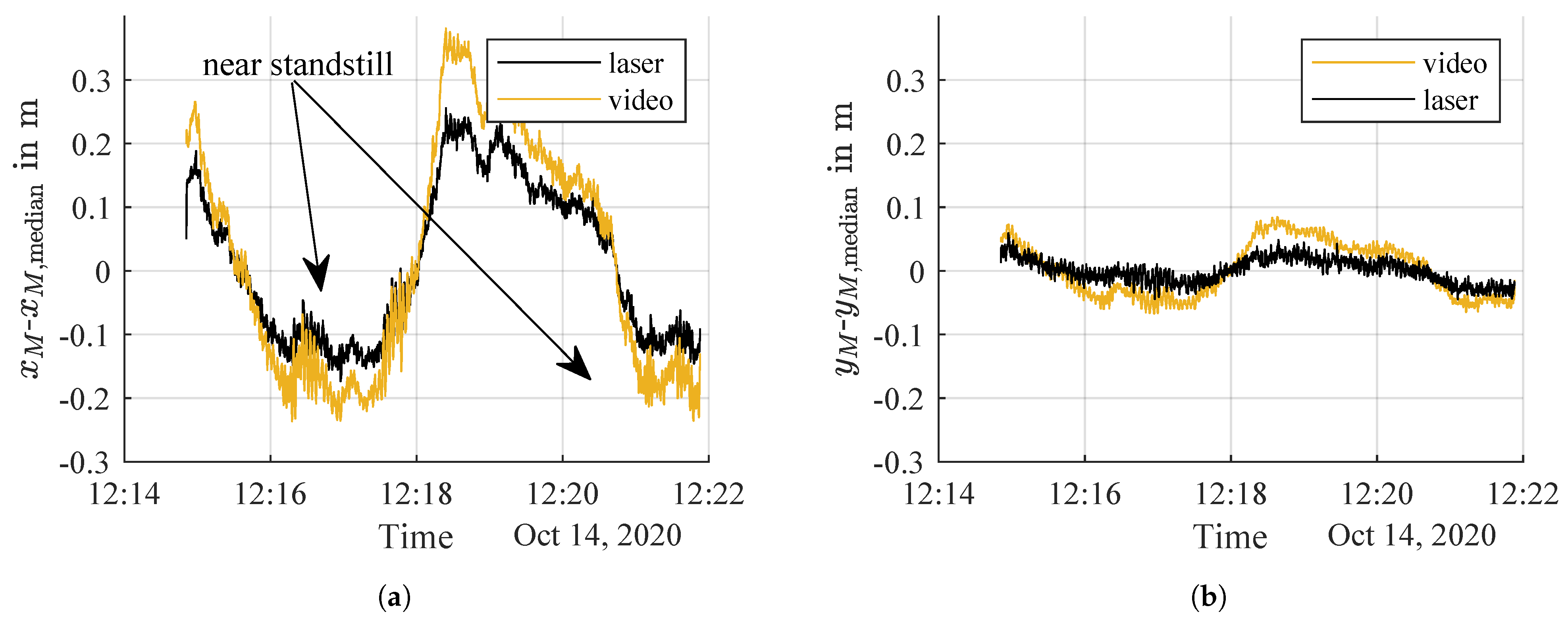
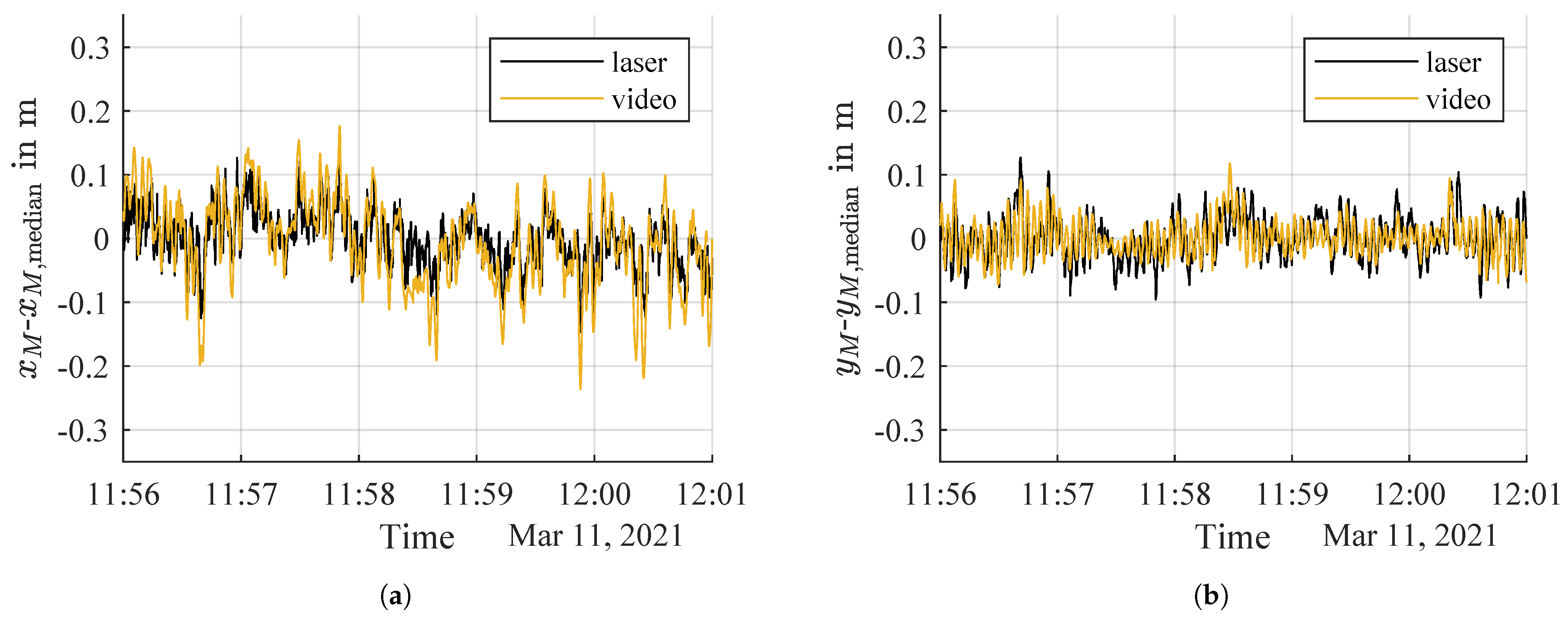
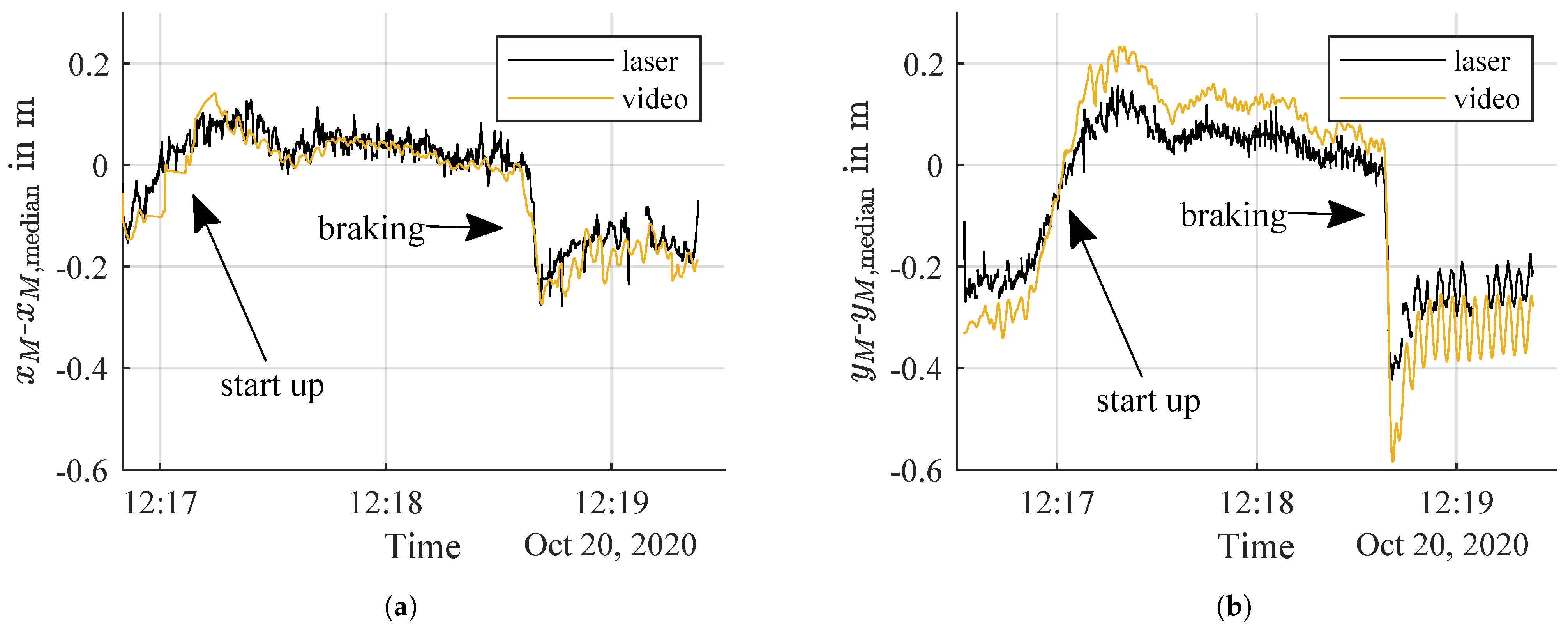
4.2. Horizontal Scanner Alignment: Tower Deformation Analysis in the Time Domain
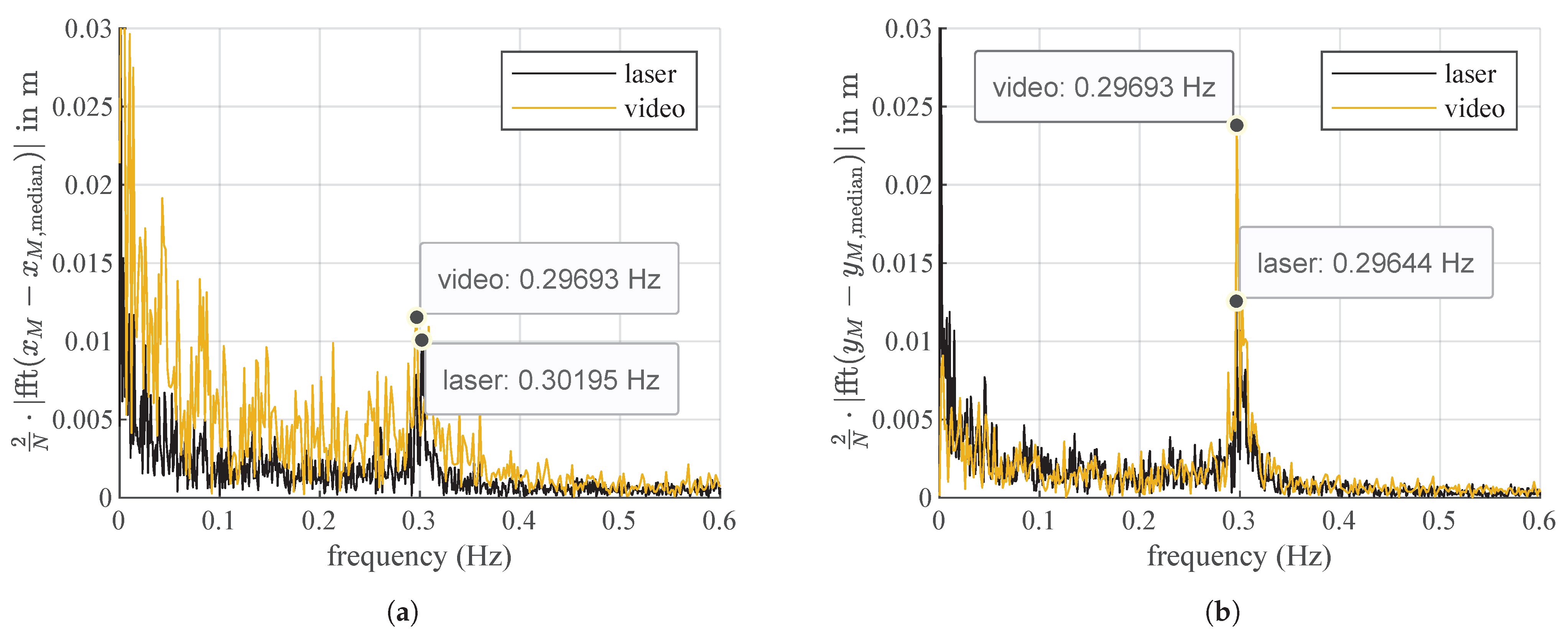
4.3. Horizontal Scanner Alignment: Analysis in the Frequency Domain
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Veers, P.; Dykes, K.; Lantz, E.; Barth, S.; Bottasso, C.L.; Carlson, O.; Clifton, A.; Green, J.; Green, P.; Holttinen, H.; et al. Grand challenges in the science of wind energy. Science 2019, 366. [Google Scholar] [CrossRef] [PubMed]
- Tchakoua, P.; Wamkeue, R.; Ouhrouche, M.; Slaoui-Hasnaoui, F.; Tameghe, T.; Ekemb, G. Wind Turbine Condition Monitoring: State-of-the-Art Review, New Trends, and Future Challenges. Energies 2014, 7, 2595–2630. [Google Scholar] [CrossRef]
- Wymore, M.L.; van Dam, J.E.; Ceylan, H.; Qiao, D. A survey of health monitoring systems for wind turbines. Renew. Sustain. Energy Rev. 2015, 52, 976–990. [Google Scholar] [CrossRef]
- Dilek, A.U.; Oguz, A.D.; Satis, F.; Gokdel, Y.D.; Ozbek, M. Condition monitoring of wind turbine blades and tower via an automated laser scanning system. Eng. Struct. 2019, 189, 25–34. [Google Scholar] [CrossRef]
- Zieger, T.; Nagel, S.; Lutzmann, P.; Kaufmann, I.; Ritter, J.; Ummenhofer, T.; Knödel, P.; Fischer, P. Simultaneous identification of wind turbine vibrations by using seismic data, elastic modeling and laser Doppler vibrometry. Wind Energy 2020, 23, 1145–1153. [Google Scholar] [CrossRef]
- Baqersad, J.; Poozesh, P.; Niezrecki, C.; Avitabile, P. Photogrammetry and optical methods in structural dynamics—A review. Mech. Syst. Signal Process. 2017, 86, 17–34. [Google Scholar] [CrossRef]
- Ozbek, M.; Meng, F.; Rixen, D.J. Challenges in testing and monitoring the in-operation vibration characteristics of wind turbines. Mech. Syst. Signal Process. 2013, 41, 649–666. [Google Scholar] [CrossRef]
- Mukupa, W.; Roberts, G.W.; Hancock, C.M.; Al-Manasir, K. A review of the use of terrestrial laser scanning application for change detection and deformation monitoring of structures. Surv. Rev. 2016, 1–18. [Google Scholar] [CrossRef]
- Schneider, D. Terrestrial laser scanning for area based deformation analysis of towers and water damns. In Proceedings of the 12th FIG Symposium, Baden, Austria, 22–24 May 2006; Volume 3rd IAG. [Google Scholar]
- Schill, F.; Eichhorn, A. (Eds.) Investigations of Low- and High-Frequency Movements of Wind Power Plants Using a Profile Laser Scanner; 2016. [Google Scholar]
- Mitka, B.; Klapa, P.; Gniadek, J. Use of Terrestrial Laser Scanning for Measurements of Wind Power Stations. Geomat. Environ. Eng. 2019, 13, 39. [Google Scholar] [CrossRef]
- Artese, S.; Nico, G. TLS and GB-RAR Measurements of Vibration Frequencies and Oscillation Amplitudes of Tall Structures: An Application to Wind Towers. Appl. Sci. 2020, 10, 2237. [Google Scholar] [CrossRef]
- Gander, W.; Golub, G.H.; Strebel, R. Least-squares fitting of circles and ellipses. BIT Numer. Math. 1994, 34, 558–578. [Google Scholar] [CrossRef]
- Brown, D.; Cox, A.J. Innovative Uses of Video Analysis. Phys. Teach. 2009, 47, 145–150. [Google Scholar] [CrossRef]
- Brown, D.; Christian, W.; Hanson, R. Tracker Video Analysis and Modeling Tool. Available online: https://physlets.org/tracker/ (accessed on 16 March 2021).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value |
|---|---|
| hub height | 128 m |
| concrete tower length | 57 m |
| steel tower length | 69 m |
| cut-in wind speed | 3.5 m s−1 |
| rated wind speed | 13.5 m s−1 |
| cut-out wind speed | 25 m s−1 |
| Name | Value |
|---|---|
| laser wave length | = 128 nm |
| laser pulse rate | 40 kHz |
| laser class | 1 M |
| laser spot size at sensor window | 12 mm2 × 16 mm2 |
| scan angle | = 90° |
| points per scan | N = 1000 |
| scan rate | 20 Hz (40 Hz) |
| uncertainty | 5 mm |
| Name | Value |
|---|---|
| date | 16 November 2020 |
| distance | = 127 m |
| measurement angle | ≈ 270° |
| average wind speed | 8.50 m s−1 |
| Low Wind Speed | High Wind Speed | Start-Up and Braking | |
|---|---|---|---|
| date | 14 October 2020 | 11 March 2021 | 20 October 2020 |
| distance | = 127 m | = 127 m | = 155 m |
| camera position | 2 | 2 | 1 |
| measurement angle | ≈ 110° | ≈ 230° | ≈ 180° |
| inclination angle | = 42.3° | = 41.8° | = 36.0° |
| corresponding height on tower | ≈ 115.5 m | ≈ 113.5 m | ≈ 112.6 m |
| average wind speed | 6.85 m s−1 | 13.89 m s−1 | ≈ 6 m s−1 |
| minimum wind speed | 2.66 m s−1 | 6.99 m s−1 | |
| maximum wind speed | 10.09 m s−1 | 22.26 m s−1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Helming, P.; von Freyberg, A.; Sorg, M.; Fischer, A. Wind Turbine Tower Deformation Measurement Using Terrestrial Laser Scanning on a 3.4 MW Wind Turbine. Energies 2021, 14, 3255. https://doi.org/10.3390/en14113255
Helming P, von Freyberg A, Sorg M, Fischer A. Wind Turbine Tower Deformation Measurement Using Terrestrial Laser Scanning on a 3.4 MW Wind Turbine. Energies. 2021; 14(11):3255. https://doi.org/10.3390/en14113255
Chicago/Turabian StyleHelming, Paula, Axel von Freyberg, Michael Sorg, and Andreas Fischer. 2021. "Wind Turbine Tower Deformation Measurement Using Terrestrial Laser Scanning on a 3.4 MW Wind Turbine" Energies 14, no. 11: 3255. https://doi.org/10.3390/en14113255
APA StyleHelming, P., von Freyberg, A., Sorg, M., & Fischer, A. (2021). Wind Turbine Tower Deformation Measurement Using Terrestrial Laser Scanning on a 3.4 MW Wind Turbine. Energies, 14(11), 3255. https://doi.org/10.3390/en14113255