
The Impact of Time Delays for Power Hardware-in-the-Loop Investigations


Abstract
1. Introduction
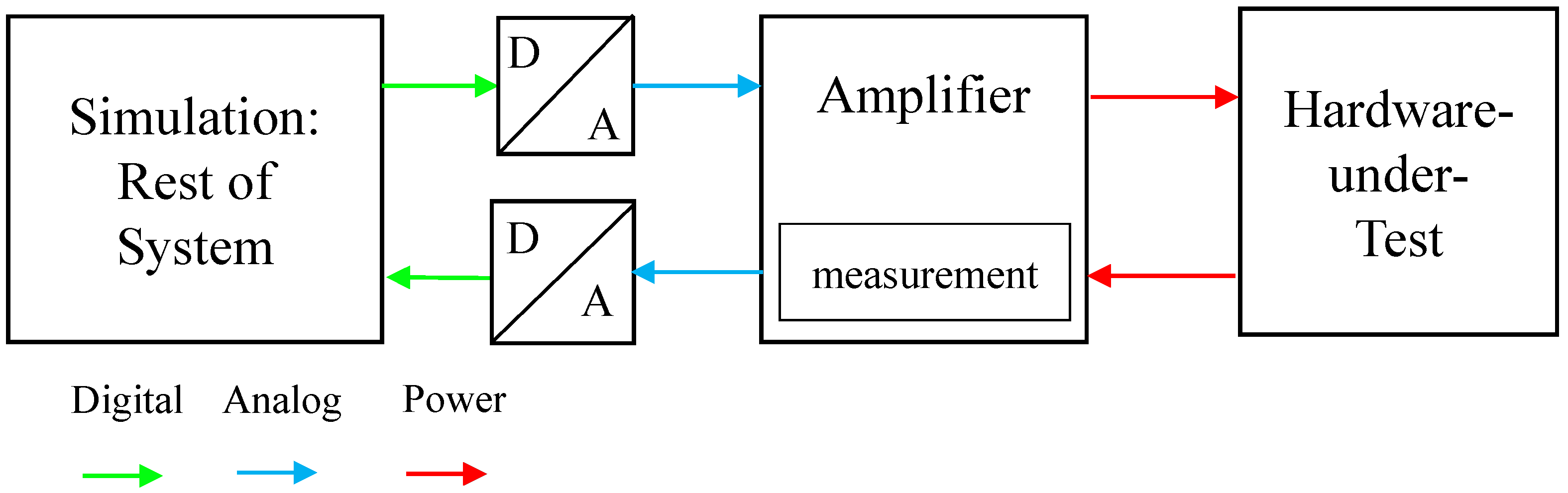
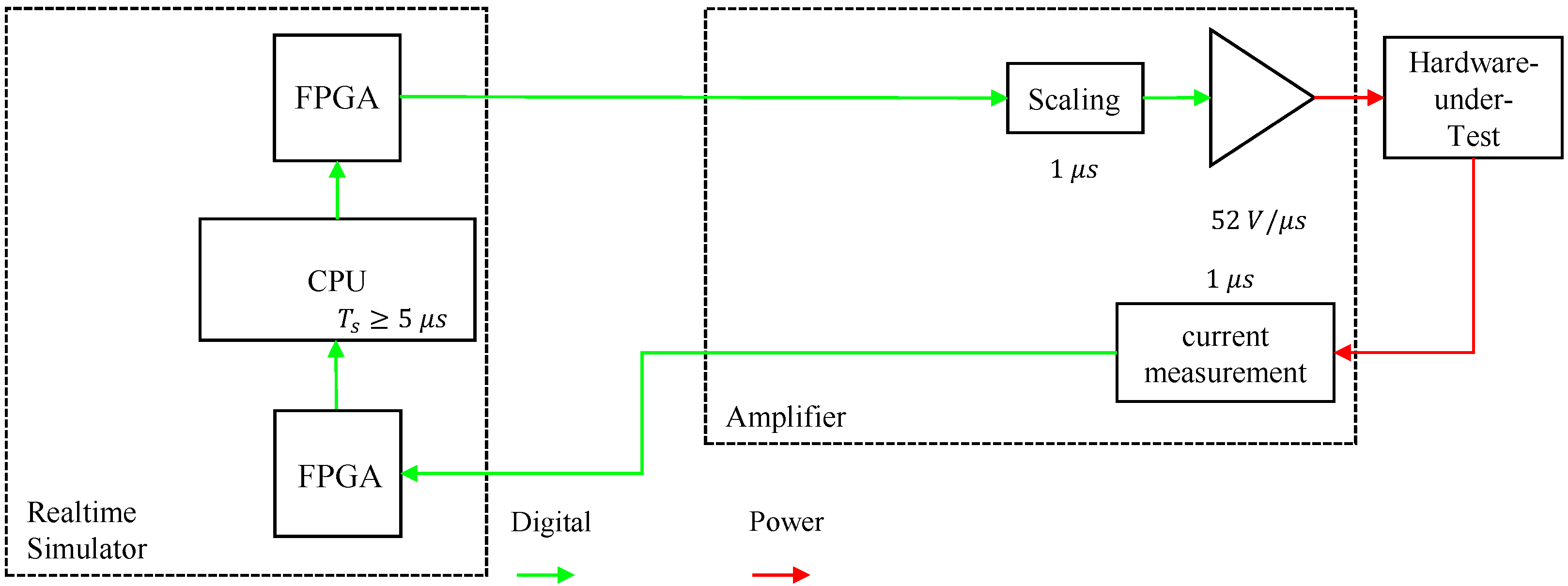
2. PHiL Device Overview
2.1. Simulator
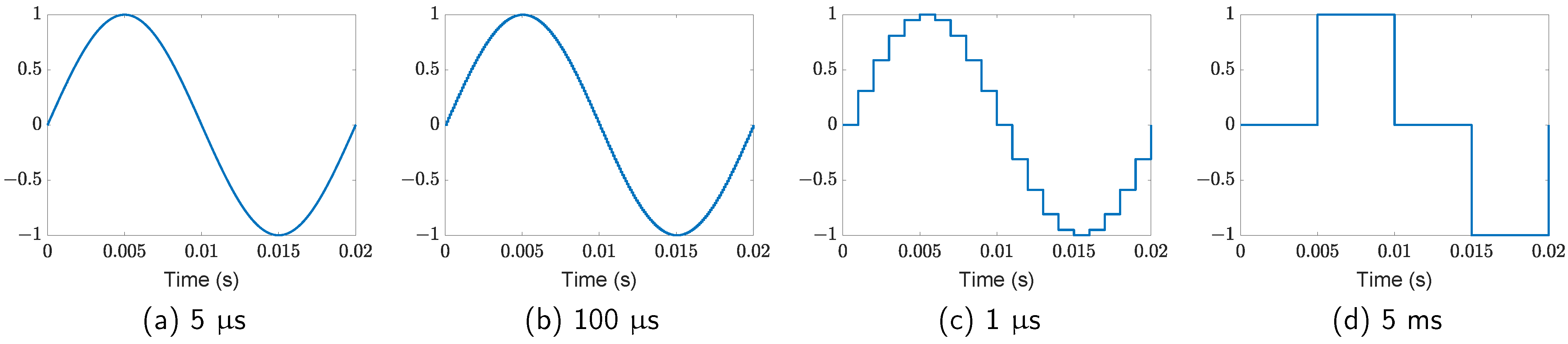
2.1.1. Real-Time Simulator
2.1.2. Programmable Logic Controller
2.2. Power Amplifier
2.3. Hardware under Test
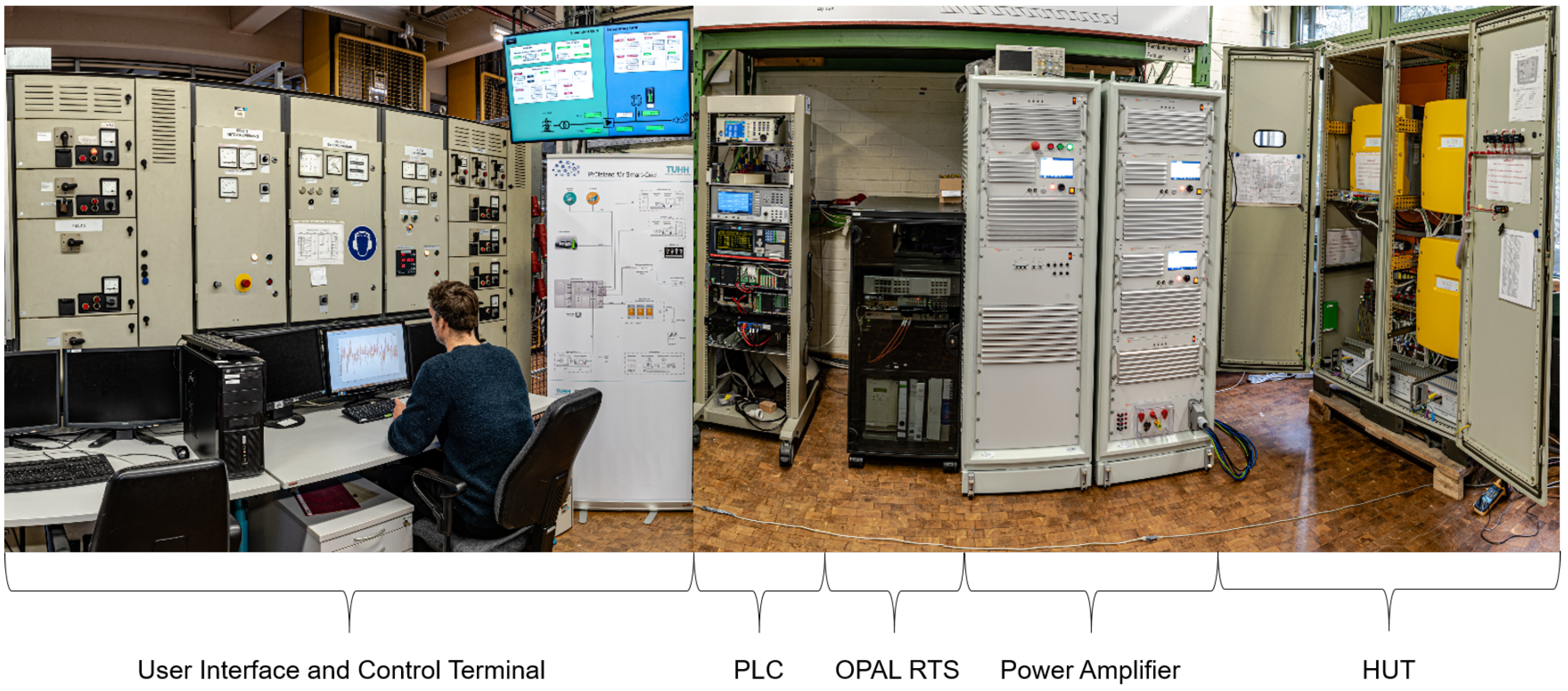
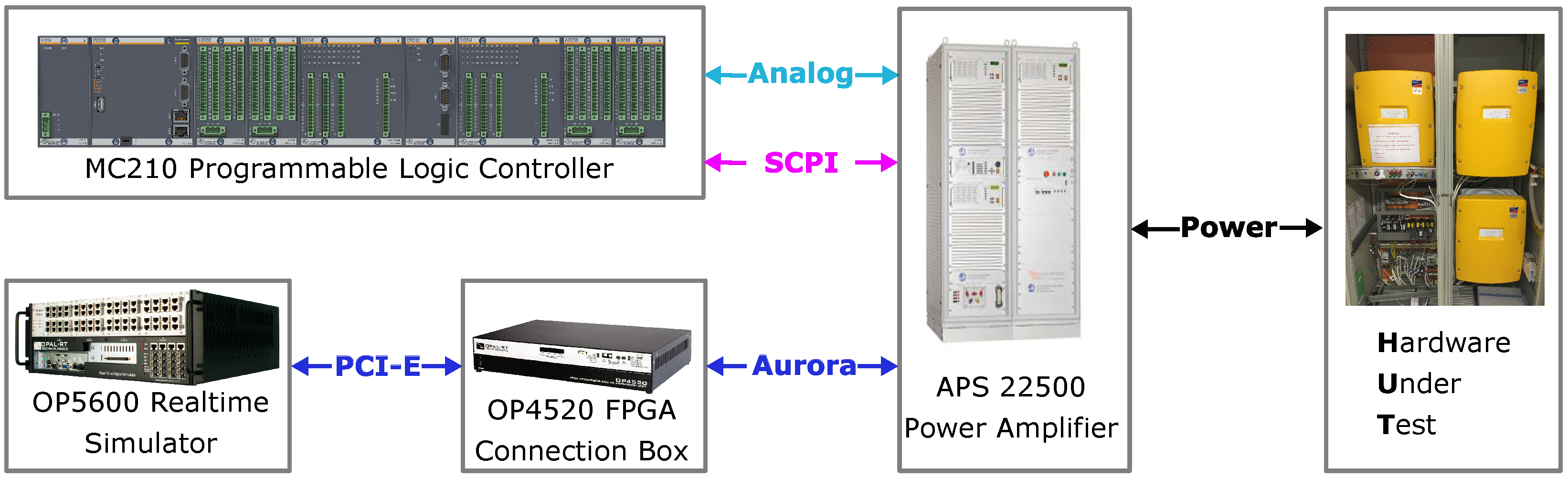
3. TU Hamburg Laboratory Setup—PHiLsLab
3.1. Three-Phased Power Amplifier System
3.2. Simulator
4. Case Examples
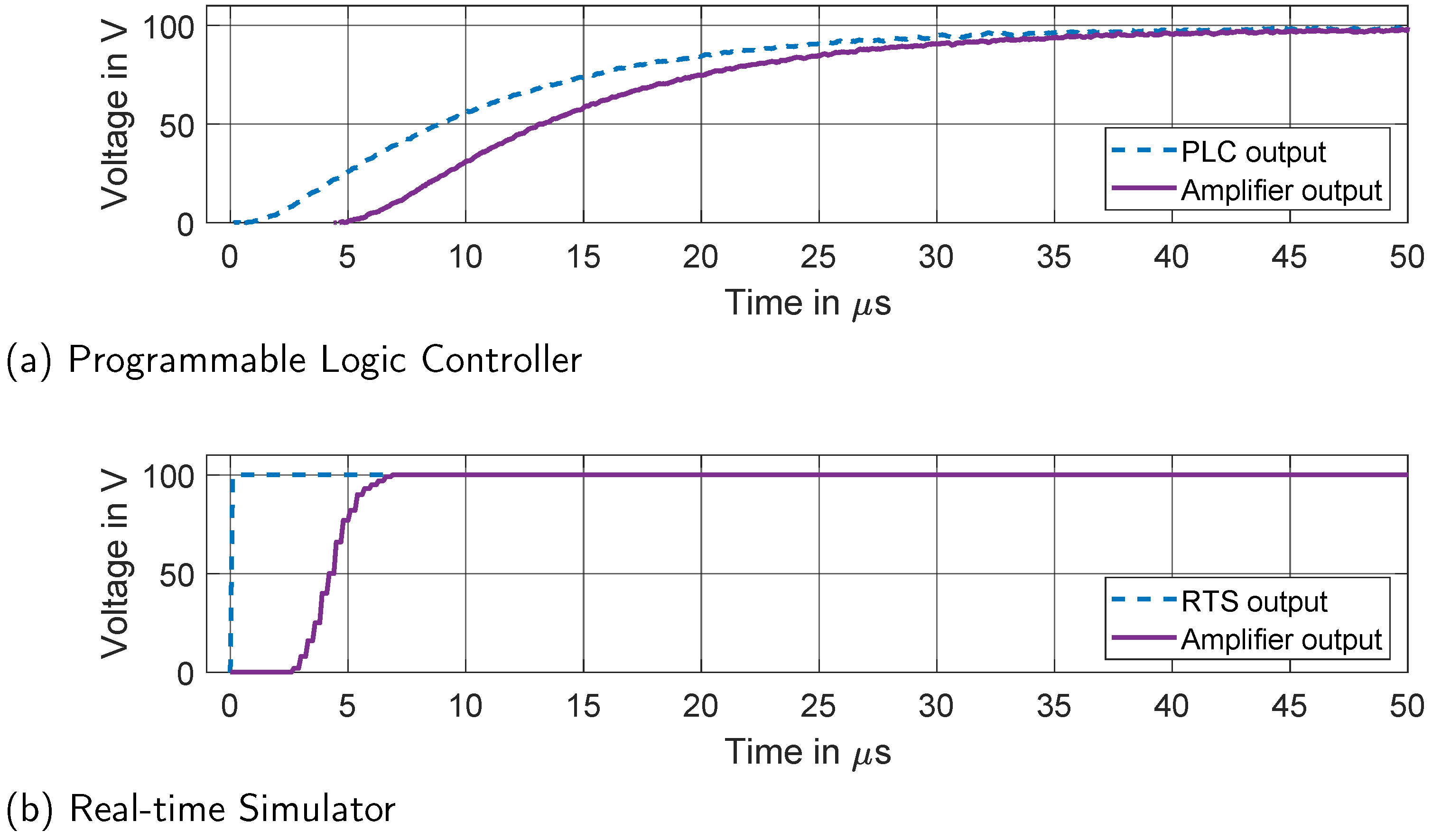
4.1. Comparison of the Bachmann PLC with the OPAL-RT RTS
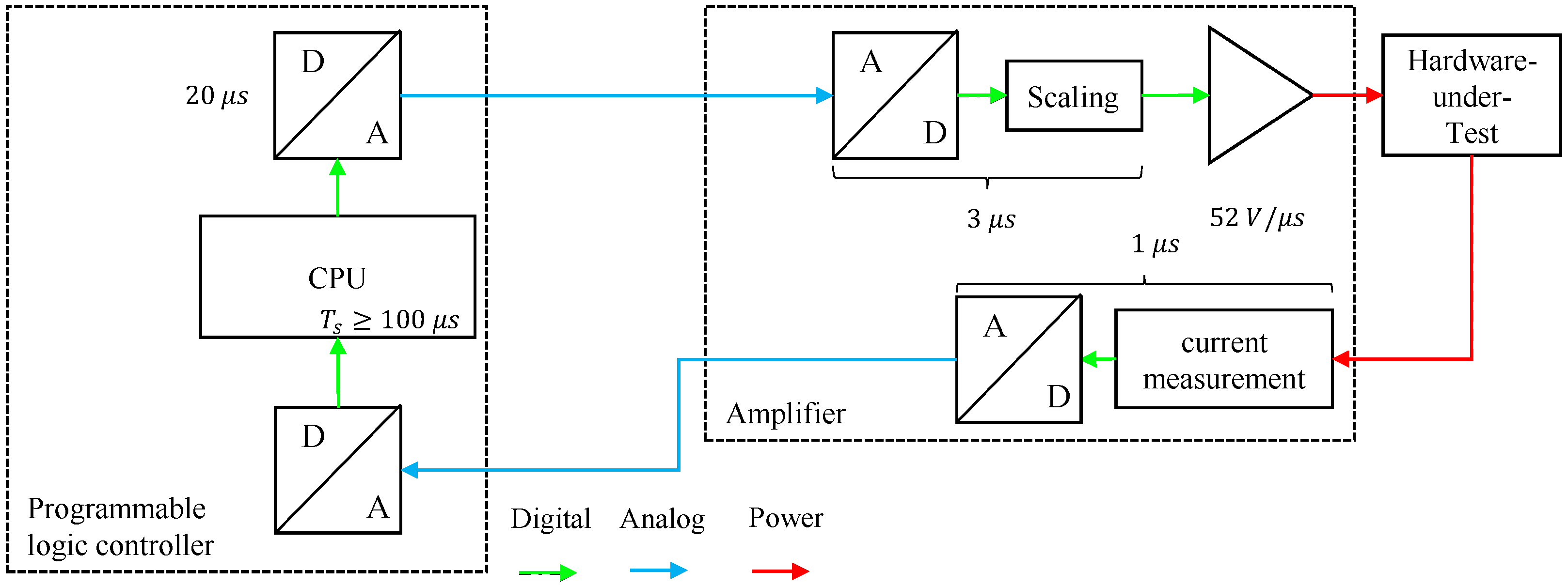
4.1.1. Output Delay
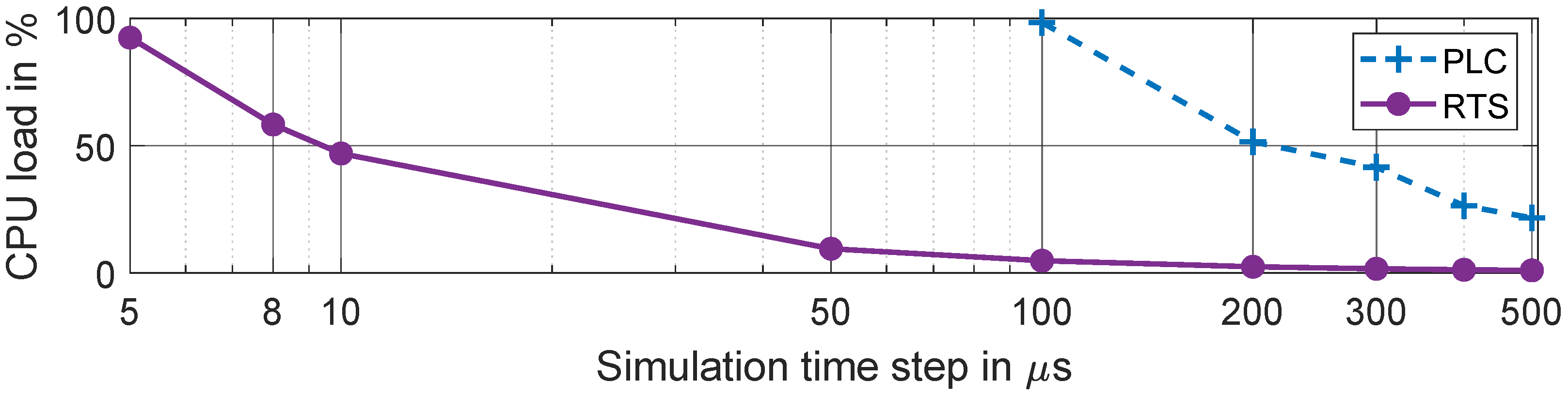
4.1.2. CPU Load
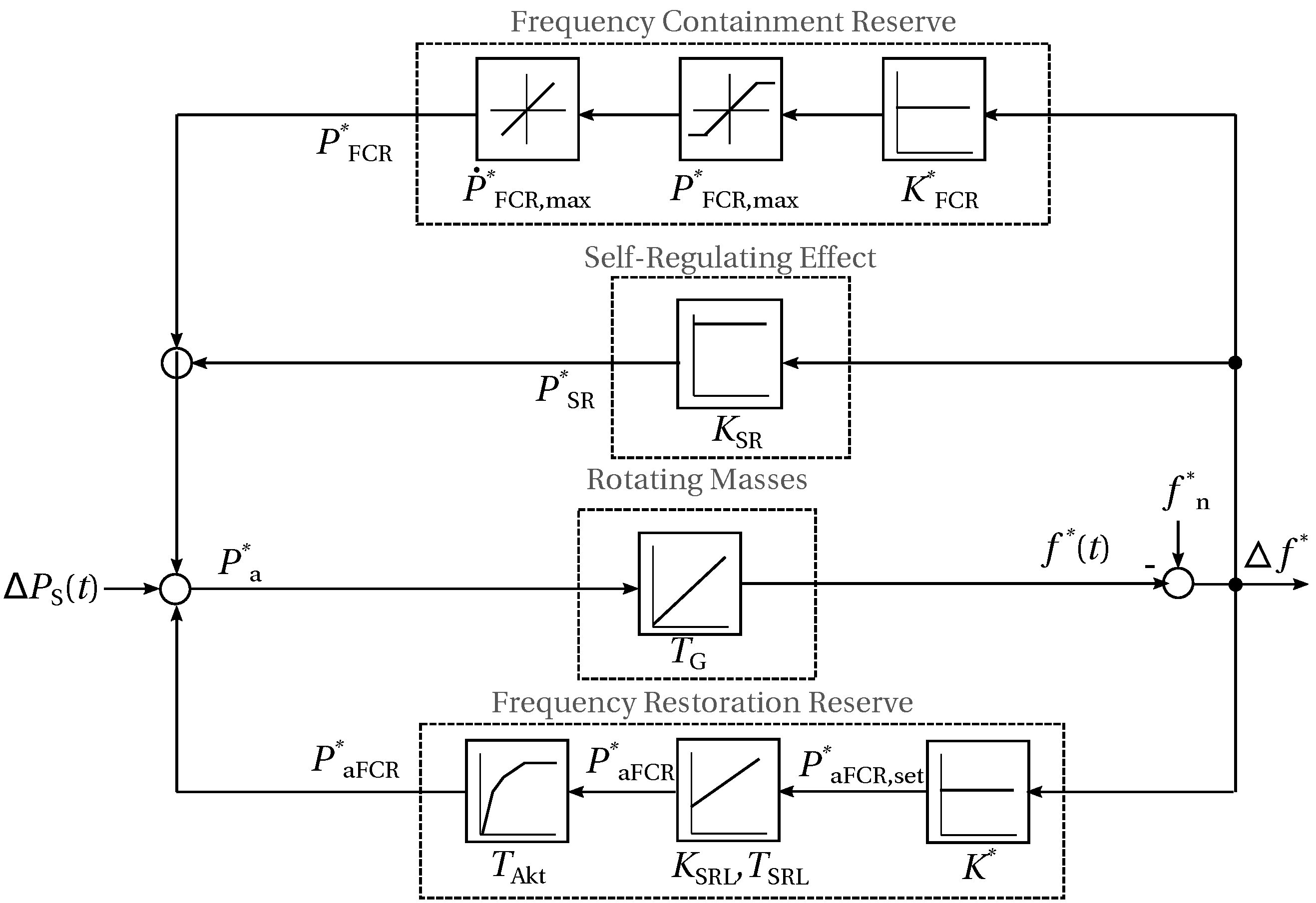
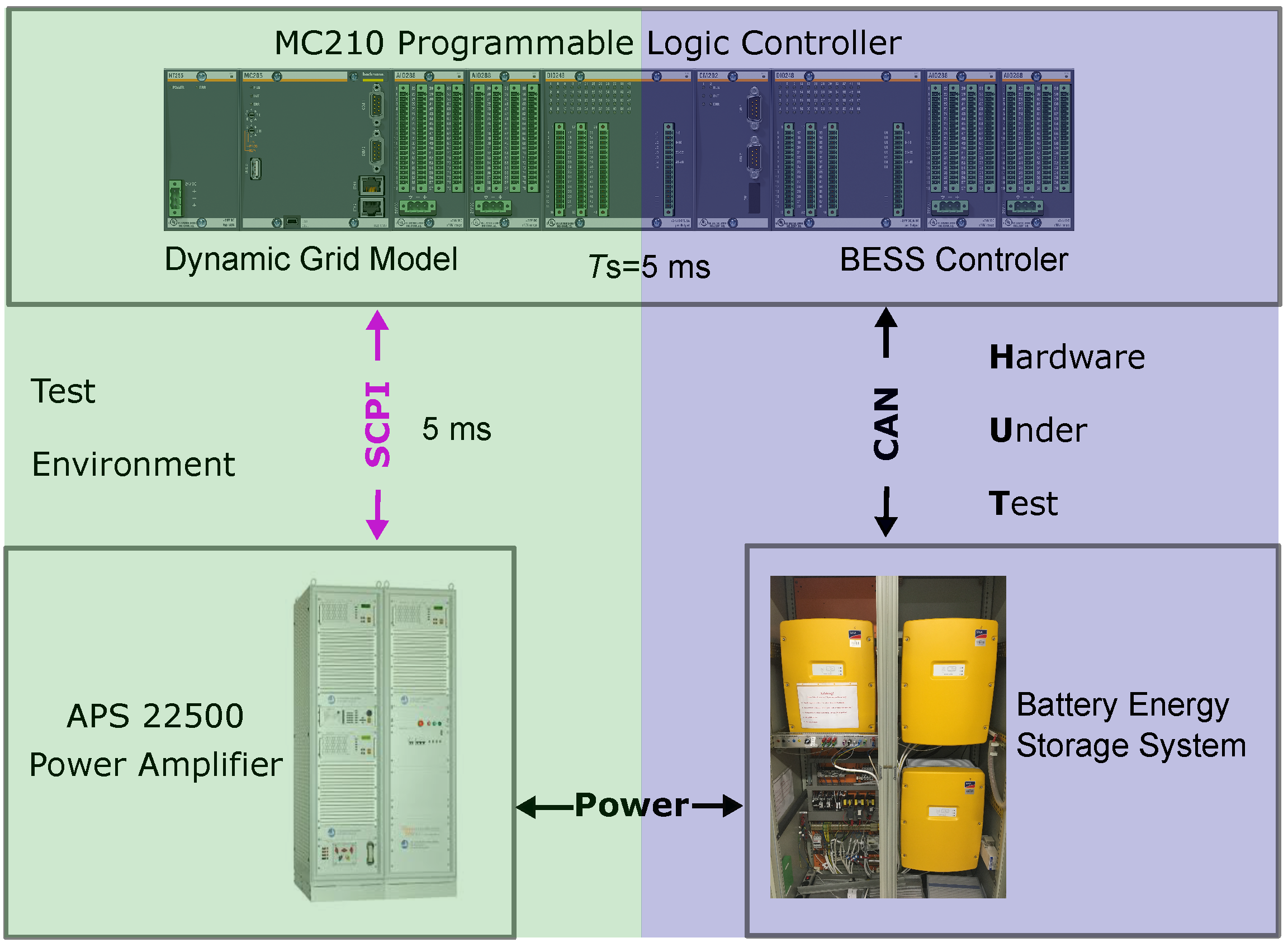
4.2. Impact of Battery Energy Storage Systems for the Provision of FCR in Case of a 3 GW Failure
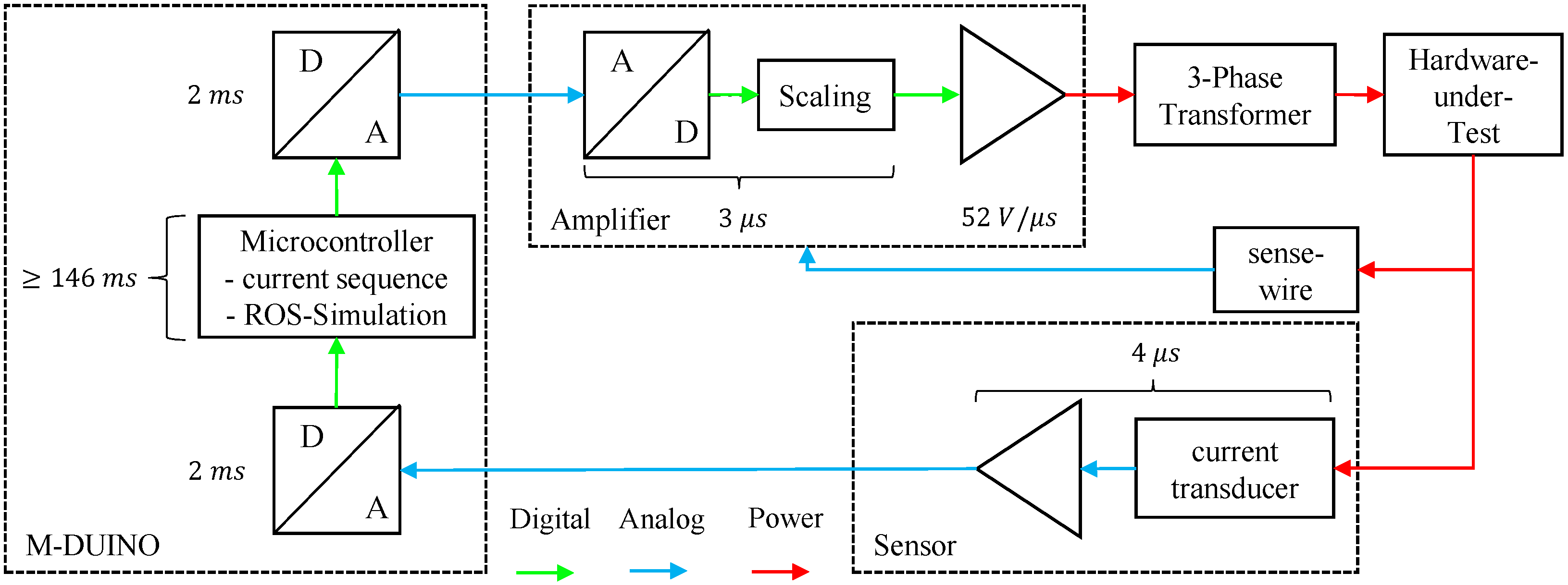
4.3. Closed Loop Control Current Stage
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BESS | Battery Energy Management System |
| CHiL | Controller Hardware-in-the-Loop |
| FCR | Frequency Containment Reserve |
| FPGA | Field Programmable Gate Array |
| HUT | Hardware Under Test |
| PHiL | Power Hardware-in-the-Loop |
| PHiLsLab | Power Hardware-in-the-Loop Simulation Laboratory |
| PLC | Programmable Logic Controller |
| ROS | Rest of System |
| RTS | Real-time Simulator |
| SCPI | Standard Commands for Programmable Instruments |
References
- Ertugrul, N.; Abbott, D. DC is the Future [Point of View]. Proc. IEEE 2020, 108, 615–624. [Google Scholar] [CrossRef]
- van Nguyen, H.; Besanger, Y.; Tran, Q.T.; Boudinnet, C.; Nguyen, T.L.; Brandl, R.; Strasser, T.I. Using power-hardware-in-the-loop experiments together with co-simulation for the holistic validation of cyber-physical energy systems. In Proceedings of the 2017 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Torino, Italy, 26–29 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Geisbuesch, J.; Karrari, S.; Kreideweis, P.; de Sousa, B.; Tiago, W.; Noe, M. Set-Up of a Dynamic Multi-Purpose Power-Hardware-in-the-Loop System for New Technologies Integration. In Proceedings of the 2018 IEEE Workshop on Complexity in Engineering (COMPENG), Florence, Italy, 10–12 October 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Edrington, C.S.; Steurer, M.; Langston, J.; El-Mezyani, T.; Schoder, K. Role of Power Hardware in the Loop in Modeling and Simulation for Experimentation in Power and Energy Systems. Proc. IEEE 2015, 103, 2401–2409. [Google Scholar] [CrossRef]
- Langston, J.; Sloderbeck, M.; Steurer, M.; Dalessandro, D.; Fikse, T. Role of hardware-in-the-loop simulation testing in transitioning new technology to the ship. In Proceedings of the 2013 IEEE Electric Ship Technologies Symposium (ESTS), Arlington, VA, USA, 22–24 April 2013; pp. 514–519. [Google Scholar] [CrossRef]
- Yamane, A.; Rangineed, T.; Gregoire, L.A.; Ali, S.Q.; Paquin, J.N.; Belanger, J. Multi-FPGA Solution for Large Power Systems and Microgrids Real Time Simulation. In Proceedings of the 2019 IEEE Conference on Power Electronics and Renewable Energy (CPERE), Aswan, Egypt, 23–25 October 2019; pp. 367–370. [Google Scholar] [CrossRef]
- Saad, H.; Ould-Bachir, T.; Mahseredjian, J.; Dufour, C.; Dennetiere, S.; Nguefeu, S. Real-Time Simulation of MMCs Using CPU and FPGA. IEEE Trans. Power Electron. 2015, 30, 259–267. [Google Scholar] [CrossRef]
- Bachmann Electronic GmbH. Bachmann System Overview; Datasheet: Feldkirch, Germany, 2019; Available online: https://www.bachmann.info/en/issuu-pages/systemoverview-2020-english/ (accessed on 27 May 2021).
- Zhang, P. Industrial Control Technology: A Handbook for Engineers and Researchers; William Andrew: Norwich, NY, USA, 2008. [Google Scholar]
- Lehfuss, F.; Lauss, G.; Kotsampopoulos, P.; Hatziargyriou, N.; Crolla, P.; Roscoe, A. Comparison of multiple power amplification types for power Hardware-in-the-Loop applications. In Proceedings of the 2012 Complexity in Engineering (COMPENG), Aachen, Germany, 11–13 June 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Ren, W.; Steurer, M.; Baldwin, T.L. An Effective Method for Evaluating the Accuracy of Power Hardware-in-the-Loop Simulations. IEEE Trans. Ind. Appl. 2009, 45, 1484–1490. [Google Scholar] [CrossRef]
- Viehweider, A.; Lauss, G.; Felix, L. Stabilization of Power Hardware-in-the-Loop simulations of electric energy systems. Simul. Model. Pract. Theory 2011, 19, 1699–1708. [Google Scholar] [CrossRef]
- Ren, W.; Steurer, M.; Baldwin, T.L. (Eds.) Improve the Stability and the Accuracy of Power Hardware-in-the-Loop Simulation by Selecting Appropriate Interface Algorithms. IEEE Trans. Ind. Appl. 2008. [Google Scholar] [CrossRef]
- de Jong, E.; de Graff, R.; Vassen, P.; Crolla, P.; Roscoe, A.; Lefuss, F.; Lauss, G.; Kotsampopoulos, P.; Gafaro, F. European White Book on Real-Time Powerhardware-in-the-Loop Testing International White Book on DER Protection: Review and Testing Procedures; DERlab Report; DERlab e.V.—European Distributed Energy Resources Laboratories: Hessen, Germany, 2012; ISBN 978-3-943517-01-9. [Google Scholar]
- Roscoe, A.J.; Mackay, A.; Burt, G.M.; McDonald, J.R. Architecture of a Network-in-the-Loop Environment for Characterizing AC Power-System Behavior. IEEE Trans. Ind. Electron. 2010, 57, 1245–1253. [Google Scholar] [CrossRef]
- Montoya, J.; Brandl, R.; Vishwanath, K.; Johnson, J.; Darbali-Zamora, R.; Summers, A.; Hashimoto, J.; Kikusato, H.; Ustun, T.S.; Ninad, N.; et al. Advanced Laboratory Testing Methods Using Real-Time Simulation and Hardware-in-the-Loop Techniques: A Survey of Smart Grid International Research Facility Network Activities. Energies 2020, 13, 3267. [Google Scholar] [CrossRef]
- Spitzenberger & Spies. APS Series of 4-Quadrant Amplifiers, Datasheet. 2021. Available online: https://spitzenberger.de/weblink/1107 (accessed on 26 February 2021).
- Bachmann Electronic GmbH. Manual MC210. Available online: https://www.bachmann.info/fileadmin/media/Produkte/Steuerungssystem/Produktblaetter/MC200-Serie_de.pdf (accessed on 22 January 2021).
- OPAL-RT Technologies, Inc. OP5600V2—Hardware Products Documentation—Wiki OPAL-RT. Available online: https://wiki.opal-rt.com/display/HDGD/OP5600V2 (accessed on 21 January 2021).
- Mathworks. MATLAB&Simulink. 2019. Available online: https://de.mathworks.com/help/releases/R2019b/pdf_doc/simulink/slref.pdf (accessed on 26 February 2021).
- Kumar, Y.P.; Bhimasingu, R. Alternative hardware-in-the-loop (HIL) setups for real-time simulation and testing of microgrids. In Proceedings of the 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Reddy, Y.J.; Ramsesh, A.; Raju, K.P.; Kumar, Y. A novel approach for modeling and simulation of hybrid power systems using PLCs and SCADA for hardware in the loop test. In Proceedings of the International Conference on Sustainable Energy and Intelligent Systems (SEISCON 2011), Chennai, India, 20–22 July 2011; pp. 545–553. [Google Scholar] [CrossRef]
- Xilinx. Inc. Aurora Protocol Specification. Available online: https://www.xilinx.com/support/documentation/ip_documentation/aurora_8b10b_protocol_spec_sp002.pdf (accessed on 1 March 2021).
- Spitzenberger & Spies. Advantages of linear amplifiers in Power Hardware In the Loop applications, Presentation. 2021. Available online: https://spitzenberger.de/weblink/1135 (accessed on 26 February 2021).
- Wilkening, L.; Ackermann, G.; Becker, C. Netzorientierter Betrieb von Batteriespeichersystemen in Verteilnetzen. Ph.D. Thesis, Technische Universität Hamburg, Hamburg, Germany, 2021. [Google Scholar]
- Handschin, E.; Petroianu, A. Energy Management Systems: Operation and Control of Electric Energy Transmission Systems; Electric Energy Systems and Engineering Series; Springer: Berlin/Heidelberg, Germany; New York, NY, USA; London, UK; Paris, France; Tokyo, Japan; Hong Kong, China; Barcelona, Spain; Budapest, Hungary, 1991. [Google Scholar]
- Sayigh, A.; Lejeune, A.G.H. Comprehensive Renewable Energy (Hydro Power/vol. ed. André G.H. Lejeune); Elsevier: Amsterdam, The Netherlands, 2012; Volume 6. [Google Scholar]
- Barsali, S.; Tf, C. Benchmark Systems for Network Integration of Renewable and Distributed Energy Resources. 2014. Available online: http://e-cigre.org/publication/ELT_273_8-benchmark-systems-for-network-integration-of-renewable-and-distributed-energy-resources (accessed on 27 May 2021).
- The European Commission. Commission Regulation (EU) 2017/1485 Establishing a Guideline on Electricity Transmission System Operation. 25 August 2017, pp. 1–120, In Force: This Act Has Been Changed. Current Consolidated Version: 15 March 2021. Available online: http://data.europa.eu/eli/reg/2017/1485/oj (accessed on 27 May 2021).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Minimum Time Delay |
|---|---|
| Simulator time step: | |
| OPAL-RTS | 5 μs |
| Bachmann PLC | 100 μs |
| M-DUINO μC | 146 ms |
| Communication delay including conversions: | |
| OPAL-RTS Aurora | 1 μs |
| Bachmann PLC analog | 20 μs |
| Bachmann PLC SCPI | 122 μs |
| M-DUINO analog μC | 2 ms |
| linear amplifier read-in: | |
| Spitzenberger & Spies APS digital | 1 μs |
| Spitzenberger & Spies APS analog | 3 μs |
| Spitzenberger & Spies APS SCPI | 5 ms |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ihrens, J.; Möws, S.; Wilkening, L.; Kern, T.A.; Becker, C. The Impact of Time Delays for Power Hardware-in-the-Loop Investigations. Energies 2021, 14, 3154. https://doi.org/10.3390/en14113154
Ihrens J, Möws S, Wilkening L, Kern TA, Becker C. The Impact of Time Delays for Power Hardware-in-the-Loop Investigations. Energies. 2021; 14(11):3154. https://doi.org/10.3390/en14113154
Chicago/Turabian StyleIhrens, Jana, Stefan Möws, Lennard Wilkening, Thorsten A. Kern, and Christian Becker. 2021. "The Impact of Time Delays for Power Hardware-in-the-Loop Investigations" Energies 14, no. 11: 3154. https://doi.org/10.3390/en14113154
APA StyleIhrens, J., Möws, S., Wilkening, L., Kern, T. A., & Becker, C. (2021). The Impact of Time Delays for Power Hardware-in-the-Loop Investigations. Energies, 14(11), 3154. https://doi.org/10.3390/en14113154