
Software Framework for Testing of Automated Driving Systems in the Traffic Environment of Vissim




Abstract
:1. Introduction
2. Software Description
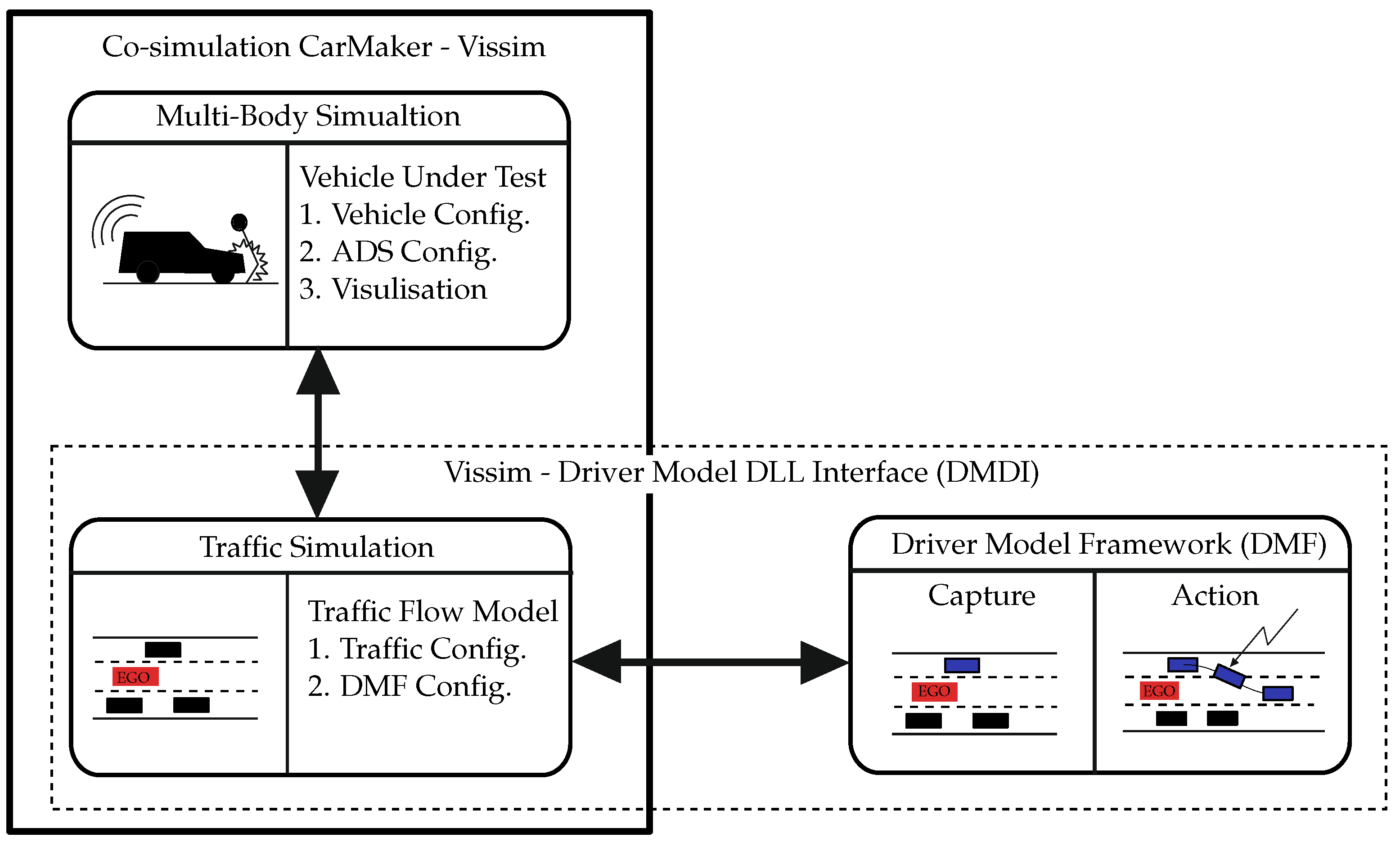
- In the capture method, it is guaranteed that nearby vehicles in relation to the EGO vehicle with current values can be queried. The user then defines the rules by which certain or all nearby vehicles are selected as target vehicles and which action is applied during defined time intervals. Duration and pauses between those intervals are also user-configurable.
- In the action method, the user defines an action which will be applied to the target vehicles. Examples of such actions can be a braking maneuver carried out by a traffic participant which is directly in front of the EGO vehicle, or a cut-in maneuver by the traffic participant in front of the EGO vehicle.
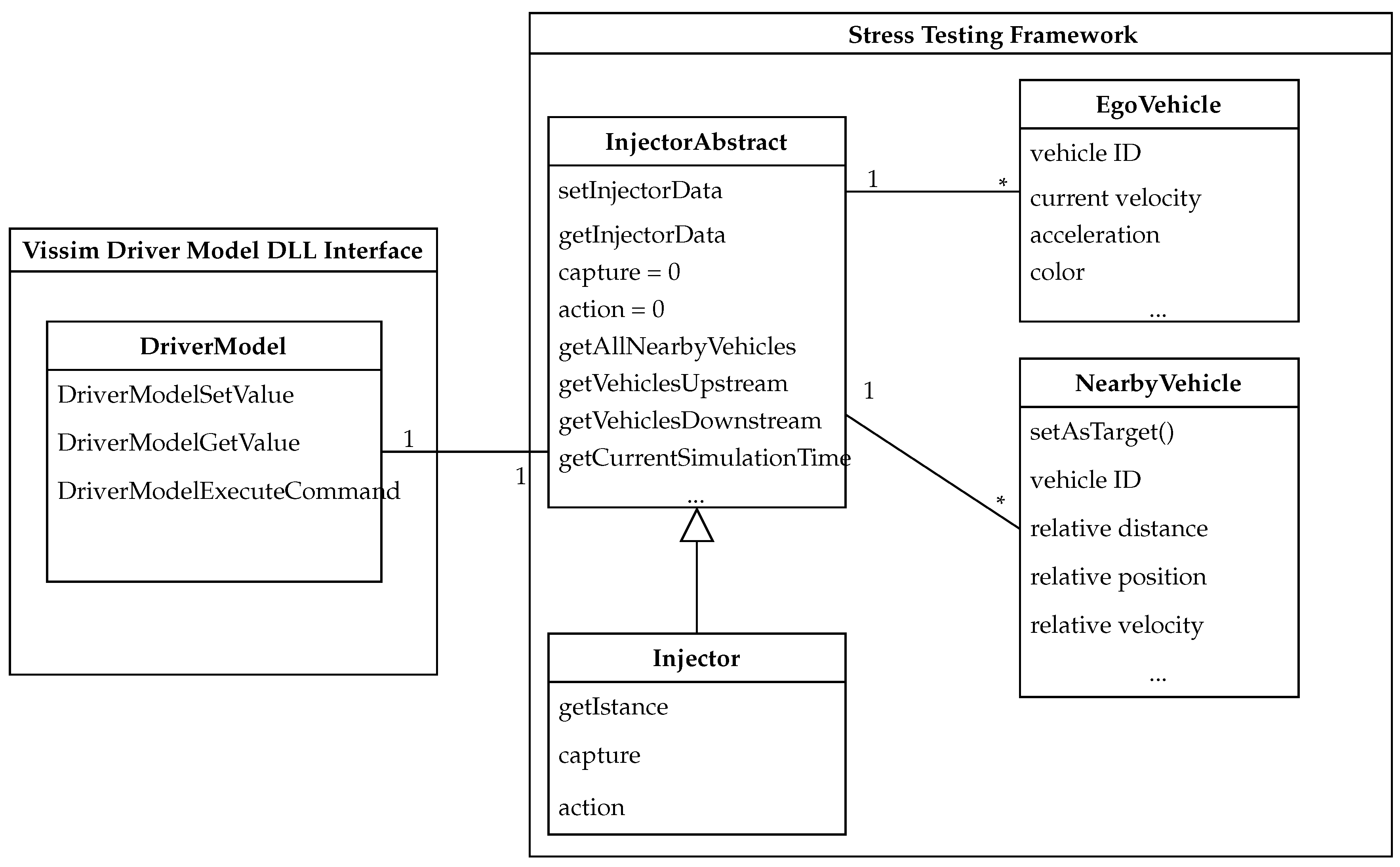
2.1. Software Architecture
2.2. Software Functionalities
- getAllNearbyVehicles
- getVehiclesDownstream
- getVehiclesUpstream
- getCurrentSimTime
- Providing the user with the updated list of nearby vehicles;
- Offering the user the ability to select target vehicles and manipulate them;
- Keeping the list of target vehicles updated during the action;
- Scheduling the capture and action methods in time;
- Taking and releasing the control of the vehicles from and to the user;
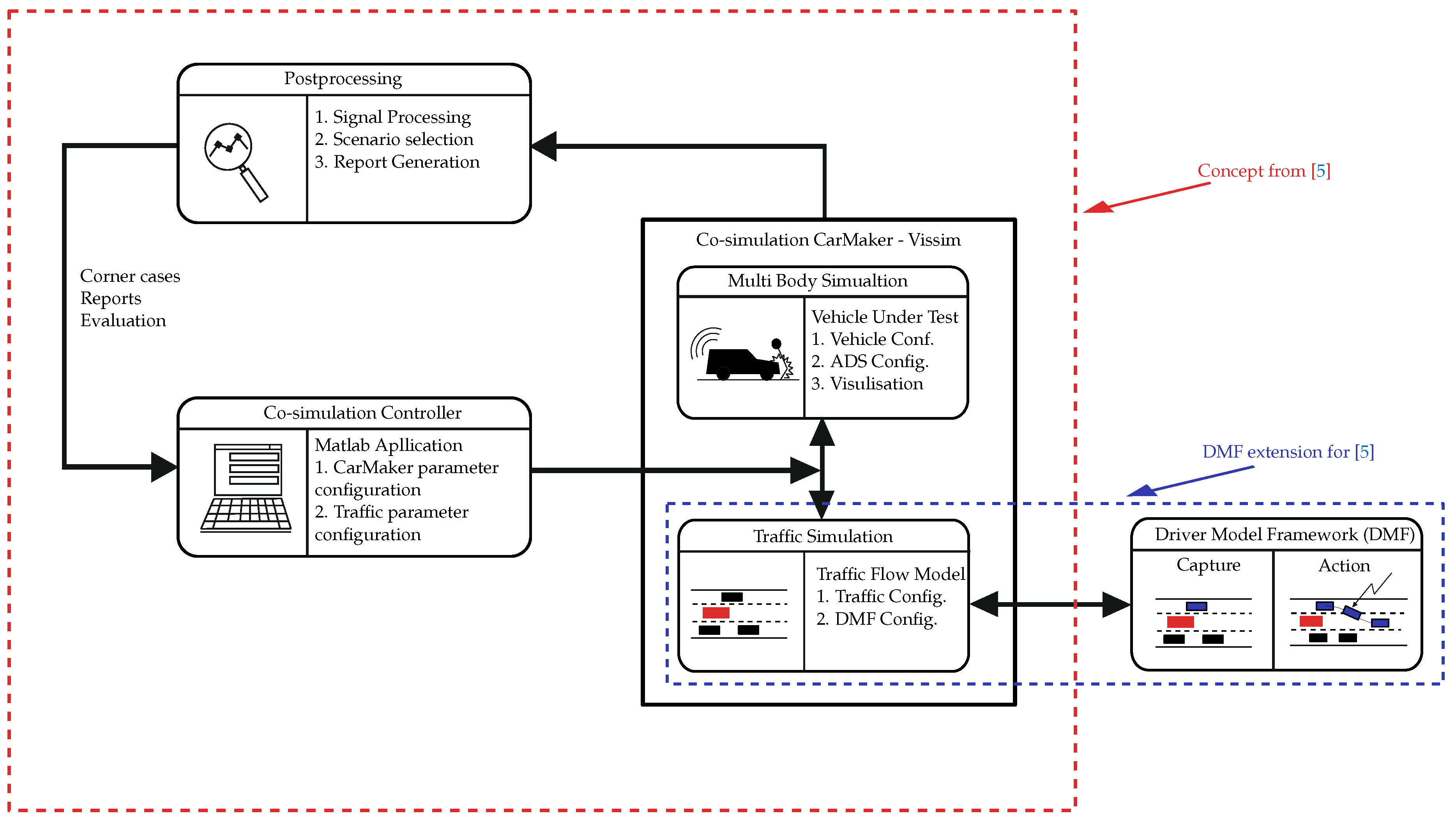
3. Use Case Application of the DMF
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hallerbach, S.; Xia, Y.; Eberle, U.; Koester, F. Simulation-Based Identification of Critical Scenarios for Cooperative and Automated Vehicles. SAE Int. J. Connect. Autom. Veh. 2018, 1, 93–106. [Google Scholar] [CrossRef]
- Semrau, M.; Erdmann, J. Simulation Framework for Testing ADAS in Chinese Traffic Situations. In Proceedings of the 2016 SUMO User Conference, Berlin, Germany, 23–25 May 2016; pp. 103–115. [Google Scholar]
- Barthauer, M.; Hafner, A. Coupling traffic and driving simulation: Taking advantage of SUMO and SILAB together. EPiC Ser. Eng. 2018, 2, 56–66. [Google Scholar] [CrossRef] [Green Version]
- Haberl, M.; Fellendorf, M.; Rudigier, M.; Kerschbaumer, A.; Eichberger, A.; Rogic, B.; Neuhold, R. Simulation assisted impact analyses of automated driving on motorways for different levels of automation and penetration. In Proceedings of the Mobil. TUM 2017, Munich, Germany, 4–5 July 2017. [Google Scholar]
- Nalic, D.; Eichberger, A.; Hanzl, G.; Fellendorf, M.; Rogic, B. Development of a Co-Simulation Framework for Systematic Generation of Scenarios for Testing and Validation of Automated Driving Systems. In Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 1895–1901. [Google Scholar] [CrossRef]
- Ulbrich, S.; Menzel, T.; Reschka, A.; Schuldt, F.; Maurer, M. Defining and Substantiating the Terms Scene, Situation, and Scenario for Automated Driving. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Las Palmas, Gran Canaria, Spain, 15–18 September 2015; pp. 982–988. [Google Scholar] [CrossRef]
- Mugur, T. Enhancing ADAS Test and Validation with Automated Search for Critical Situations. In Proceedings of the DSC 2015, Berlin, Germany, 16–18 September 2015. [Google Scholar]
- Junietz, P.; Bonakdar, F.; Klamann, B.; Winner, H. Criticality Metric for the Safety Validation of Automated Driving using Model Predictive Trajectory Optimization. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, ITSC, Maui, HI, USA, 4–7 November 2018; pp. 60–65. [Google Scholar]
- Feng, S.; Feng, Y.; Sun, H.; Bao, S.; Zhang, Y.; Liu, H.X. Testing scenario library generation for connected and automated vehicles, part II: Case studies. IEEE Trans. Intell. Transp. Syst. 2020, 1–13. [Google Scholar] [CrossRef]
- Kalra, N.; Paddock, S.M. Driving to Safety: How Many Miles of Driving Would It Take to Demonstrate Autonomous Vehicle Reliability? RAND Corporation: Santa Monica, CA, USA,, 2016; Available online: https://www.rand.org/pubs/research_reports/RR1478.html (accessed on 14 February 2021).
- Wachenfeld, W.; Winner, H. The Release of Autonomous Vehicles. In Autonomous Driving: Technical Legal and Social Aspects; Springer: Berlin/Heidelberg, Germany, 2016; pp. 425–449. [Google Scholar]
- Amersbach, C.; Winner, H. Defining Required and Feasible Test Coverage for Scenario-Based Validation of Highly Automated Vehicles. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 425–430. [Google Scholar] [CrossRef] [Green Version]
- Fellendorf, M.; Vortisch, P. Microscopic Traffc Flow Simulator VISSIM. In Fundamentals of Traffic Simulation, 1st ed.; International Series in Operations Research & Management Science; Springer Science + Business Media: Berlin, Germany, 2010; Volume 145, pp. 63–94. [Google Scholar]
- Statistisches Bundesamt. Verkehr: Verkehrsunfälle. Technical Report Reihe 7, Statistisches Bundesamt. 2018. Available online: https://www.destatis.de/DE/Themen/Gesellschaft-Umwelt/Verkehrsunfaelle/Publikationen/Downloads-Verkehrsunfaelle/verkehrsunfaelle-jahr-2080700177004.pdf (accessed on 16 February 2021).
- Nalic, D.; Pandurevic, A.; Eichberger, A.; Rogic, B. Design and Implementation of a Co-Simulation Framework for Testing of Automated Driving Systems. Sustainability 2020, 12, 10476. [Google Scholar] [CrossRef]
- Feng, S.; Yan, X.; Sun, H.; Feng, Y.; Liu, H.X. Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment. Nat. Commun. 2021, 12, 748. [Google Scholar] [CrossRef] [PubMed]
- Nalic, D.; Li, H.; Eichberger, A.; Wellershaus, C.; Pandurevic, A.; Rogic, B. Stress Testing Method for Scenario-Based Testing of Automated Driving Systems. IEEE Access 2020. [Google Scholar] [CrossRef]
- Barceló, J. (Ed.) Fundamentals of Traffic Simulation; Springer: NewYork, NY, USA, 2010; Volume 145. [Google Scholar]
- Wang, Y.; Wang, L. Autonomous vehicles’ performance on single lane road: A simulation under VISSIM environment. In Proceedings of the 2017 10th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Shanghai, China, 14–16 October 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Thus, J.J.; Kang, J.; Park, S.; Park, I.; Lee, J. Automated emergency vehicle control strategy based on automated driving controls. J. Adv. Transp. 2020, 2020, 3867921. [Google Scholar]
- Ard, T.; Dollar, R.A.; Vahidi, A.; Zhang, Y.; Karbowski, D. Microsimulation of energy and flow effects from optimal automated driving in mixed traffic. Transp. Res. Part C Emerg. Technol. 2020, 120, 102806. [Google Scholar] [CrossRef]
- Papadoulis, A.; Quddus, M.; Imprialou, M. Evaluating the safety impact of connected and autonomous vehicles on motorways. Accid. Anal. Prev. 2019, 124, 12–22. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nr. | Code Metadata Description | Description |
|---|---|---|
| C1 | Current code version | v1 |
| C2 | Permanent link to code/repository used for this code version | https://github.com/ftgTUGraz/DriverModel_Framework (accessed on 14 February 2021) |
| C3 | Code Ocean compute capsule | none |
| C4 | Legal Code License | GPL-3.0 License |
| C5 | Code versioning system used | git |
| C6 | Software code languages, tools, and services used | C++, PTV Vissim 11.00-14 |
| C7 | Compilation requirements, operating environments & dependencies | Visual Studio 2019 |
| Nr. | Code Metadata Description | Description |
|---|---|---|
| C1 | Current code version | v1 |
| C2 | Permanent link to code/repository used for this code version | https://github.com/ftgTUGraz/DriverModel_STM (accessed on 14 February 2021) |
| C3 | Code Ocean compute capsule | none |
| C4 | Legal Code License | GPL-3.0 License |
| C5 | Code versioning system used | git |
| C6 | Software code languages, tools, and services used | C++, IPG CarMaker 8.1.1 (optional), PTV Vissim 11.00-14 |
| C7 | Compilation requirements, operating environments, & dependencies | Visual Studio 2019 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nalic, D.; Pandurevic, A.; Eichberger, A.; Fellendorf, M.; Rogic, B. Software Framework for Testing of Automated Driving Systems in the Traffic Environment of Vissim. Energies 2021, 14, 3135. https://doi.org/10.3390/en14113135
Nalic D, Pandurevic A, Eichberger A, Fellendorf M, Rogic B. Software Framework for Testing of Automated Driving Systems in the Traffic Environment of Vissim. Energies. 2021; 14(11):3135. https://doi.org/10.3390/en14113135
Chicago/Turabian StyleNalic, Demin, Aleksa Pandurevic, Arno Eichberger, Martin Fellendorf, and Branko Rogic. 2021. "Software Framework for Testing of Automated Driving Systems in the Traffic Environment of Vissim" Energies 14, no. 11: 3135. https://doi.org/10.3390/en14113135
APA StyleNalic, D., Pandurevic, A., Eichberger, A., Fellendorf, M., & Rogic, B. (2021). Software Framework for Testing of Automated Driving Systems in the Traffic Environment of Vissim. Energies, 14(11), 3135. https://doi.org/10.3390/en14113135