Influence of Wake Model Superposition and Secondary Steering on Model-Based Wake Steering Control with SCADA Data Assimilation


Abstract
1. Introduction
2. Wake Model Velocity Deficit Superposition Methodology
2.1. Wake Velocity Deficit Model
2.2. Wake Deficit Superposition Methods
2.3. Two-Dimensional Secondary Steering Model
3. Closed-Loop Wake Steering Control
Analytic Gradient-Based Yaw Set-Point Optimization
4. Wake Steering Case Studies
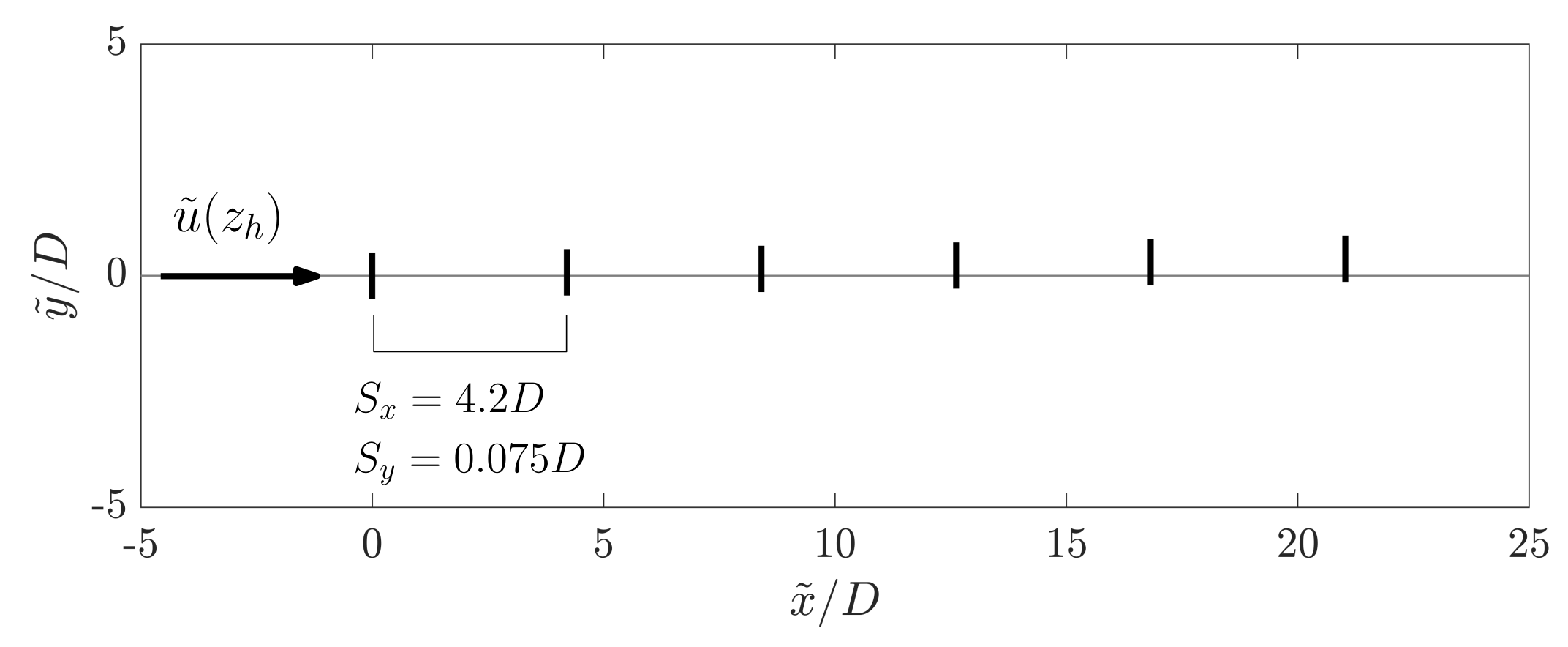
4.1. Six Turbine Test Case
4.2. Conventionally Neutral ABL LES
4.2.1. Large Eddy Simulation Setup
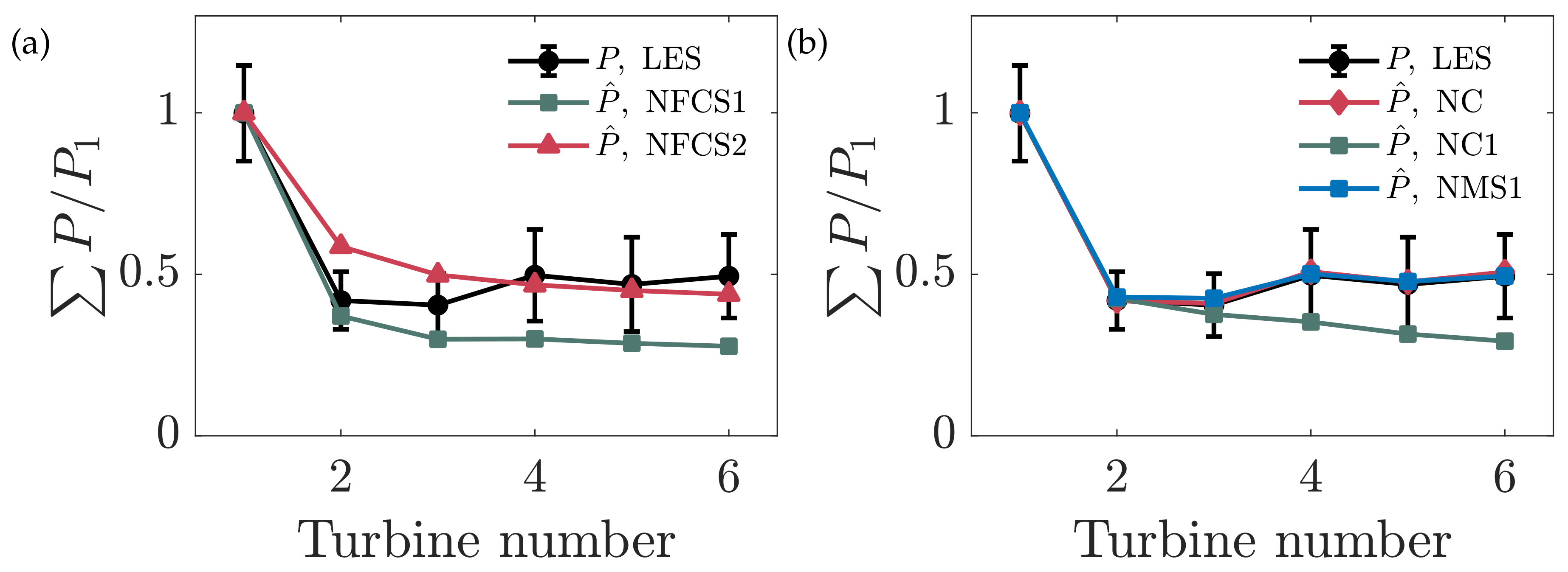
4.2.2. Large Eddy Simulation Results
5. Conclusions
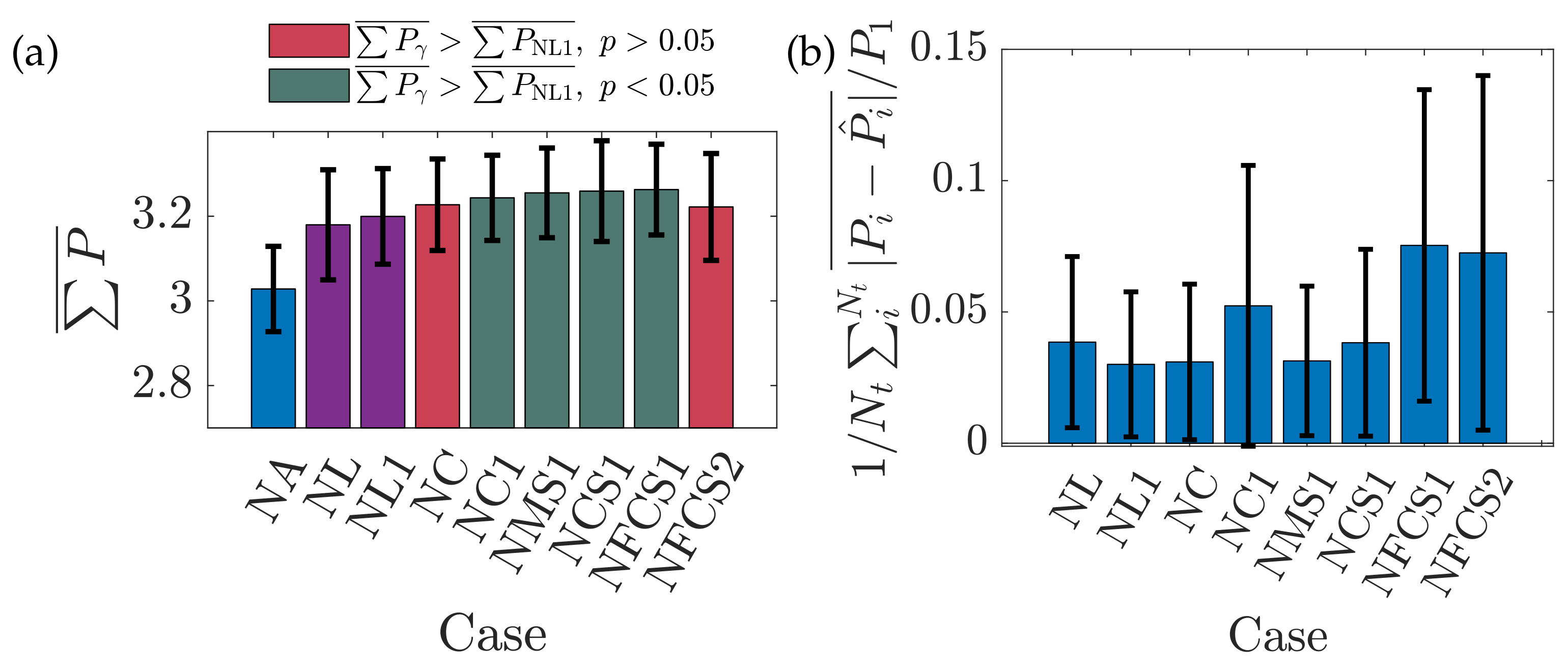
- Convective superposition [29] leads to the larger power gain over the baseline control than modified linear superposition, although it was not significantly higher.
- The nonlinear, iterative procedure required to compute the convective velocities in the convective wake superposition methodology results in increased predictive error due to additional complexity in the model parameter inverse problem, suggesting that the optimal parameter estimation requires more investigation for convective superposition.
- The proposed secondary steering model increases the power production and reduces predictive MAE, but does not have a statistically significant impact on the closed-loop wake steering case presented.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Barthelmie, R.J.; Hansen, K.; Frandsen, S.T.; Rathmann, O.; Schepers, J.; Schlez, W.; Phillips, J.; Rados, K.; Zervos, A.; Politis, E. Modelling and measuring flow and wind turbine wakes in large wind farms offshore. Wind Energy 2009, 12, 431–444. [Google Scholar] [CrossRef]
- Howland, M.F.; Lele, S.K.; Dabiri, J.O. Wind farm power optimization through wake steering. Proc. Natl. Acad. Sci. USA 2019, 116, 14495–14500. [Google Scholar] [CrossRef] [PubMed]
- Stevens, R.J.; Hobbs, B.F.; Ramos, A.; Meneveau, C. Combining economic and fluid dynamic models to determine the optimal spacing in very large wind farms. Wind Energy 2017, 20, 465–477. [Google Scholar] [CrossRef]
- Fleming, P.; Gebraad, P.M.; Lee, S.; van Wingerden, J.W.; Johnson, K.; Churchfield, M.; Michalakes, J.; Spalart, P.; Moriarty, P. Simulation comparison of wake mitigation control strategies for a two-turbine case. Wind Energy 2015, 18, 2135–2143. [Google Scholar] [CrossRef]
- Gebraad, P.; Thomas, J.J.; Ning, A.; Fleming, P.; Dykes, K. Maximization of the annual energy production of wind power plants by optimization of layout and yaw-based wake control. Wind Energy 2017, 20, 97–107. [Google Scholar] [CrossRef]
- Kheirabadi, A.C.; Nagamune, R. A quantitative review of wind farm control with the objective of wind farm power maximization. J. Wind Eng. Ind. Aerodyn. 2019, 192, 45–73. [Google Scholar] [CrossRef]
- Jiménez, Á.; Crespo, A.; Migoya, E. Application of a LES technique to characterize the wake deflection of a wind turbine in yaw. Wind Energy 2010, 13, 559–572. [Google Scholar] [CrossRef]
- Fleming, P.; King, J.; Dykes, K.; Simley, E.; Roadman, J.; Scholbrock, A.; Murphy, P.; Lundquist, J.K.; Moriarty, P.; Fleming, K.; et al. Initial results from a field campaign of wake steering applied at a commercial wind farm–Part 1. Wind Energy Sci. 2019, 4, 273–285. [Google Scholar] [CrossRef]
- Fleming, P.; Annoni, J.; Shah, J.J.; Wang, L.; Ananthan, S.; Zhang, Z.; Hutchings, K.; Wang, P.; Chen, W.; Chen, L. Field test of wake steering at an offshore wind farm. Wind Energy Sci. 2017, 2, 229–239. [Google Scholar] [CrossRef]
- Howland, M.F.; Ghate, A.S.; Lele, S.K.; Dabiri, J.O. Optimal closed-loop wake steering–Part 1: Conventionally neutral atmospheric boundary layer conditions. Wind Energy Sci. 2020, 5, 1315–1338. [Google Scholar] [CrossRef]
- Rott, A.; Doekemeijer, B.; Seifert, J.K.; Wingerden, J.W.V.; Kühn, M. Robust active wake control in consideration of wind direction variability and uncertainty. Wind Energy Sci. 2018, 3, 869–882. [Google Scholar] [CrossRef]
- Quick, J.; Annoni, J.; King, R.; Dykes, K.; Fleming, P.; Ning, A. Optimization under uncertainty for wake steering strategies. J. Phys. Conf. Ser. 2017, 854, 012036. [Google Scholar] [CrossRef]
- Simley, E.; Fleming, P.; King, J. Design and analysis of a wake steering controller with wind direction variability. Wind Energy Sci. 2020, 5, 451–468. [Google Scholar] [CrossRef]
- Staffell, I.; Green, R. How does wind farm performance decline with age? Renew. Energy 2014, 66, 775–786. [Google Scholar] [CrossRef]
- Wharton, S.; Lundquist, J.K. Atmospheric stability affects wind turbine power collection. Environ. Res. Lett. 2012, 7, 014005. [Google Scholar] [CrossRef]
- Ghate, A.S.; Ghaisas, N.; Lele, S.K.; Towne, A. Interaction of small scale homogenenous isotropic turbulence with an actuator disk. In Proceedings of the 2018 Wind Energy Symposium, Kissimmee, FL, USA, 8–12 January 2018; p. 0753. [Google Scholar]
- Sanchez Gomez, M.; Lundquist, J.K. The effect of wind direction shear on turbine performance in a wind farm in central Iowa. Wind Energy Sci. 2020, 5, 125–139. [Google Scholar] [CrossRef]
- Howland, M.F.; Gonzalez, C.M.; Martinez, J.J.P.; Quesada, J.B.; Larranaga, F.P.; Yadav, N.K.; Chawla, J.S.; Dabiri, J.O. Influence of atmospheric conditions on the power production of utility-scale wind turbines in yaw misalignment. J. Renew. Sustain. Energy 2020, 12, 063307. [Google Scholar] [CrossRef]
- Allaerts, D.; Meyers, J. Large eddy simulation of a large wind-turbine array in a conventionally neutral atmospheric boundary layer. Phys. Fluids 2015, 27, 065108. [Google Scholar] [CrossRef]
- Ciri, U.; Rotea, M.A.; Leonardi, S. Model-free control of wind farms: A comparative study between individual and coordinated extremum seeking. Renew. Energy 2017, 113, 1033–1045. [Google Scholar] [CrossRef]
- Kanev, S. Dynamic wake steering and its impact on wind farm power production and yaw actuator duty. Renew. Energy 2020, 146, 9–15. [Google Scholar] [CrossRef]
- Doekemeijer, B.M.; van der Hoek, D.; van Wingerden, J.W. Closed-loop model-based wind farm control using FLORIS under time-varying inflow conditions. Renew. Energy 2020, 156, 719–730. [Google Scholar] [CrossRef]
- Howland, M.F.; Dabiri, J.O. Wind farm modeling with interpretable physics-informed machine learning. Energies 2019, 12, 2716. [Google Scholar] [CrossRef]
- Stevens, R.J.; Gayme, D.F.; Meneveau, C. Coupled wake boundary layer model of wind-farms. J. Renew. Sustain. Energy 2015, 7, 023115. [Google Scholar] [CrossRef]
- Archer, C.L.; Vasel-Be-Hagh, A.; Yan, C.; Wu, S.; Pan, Y.; Brodie, J.F.; Maguire, A.E. Review and evaluation of wake loss models for wind energy applications. Appl. Energy 2018, 226, 1187–1207. [Google Scholar] [CrossRef]
- Lissaman, P. Energy effectiveness of arbitrary arrays of wind turbines. J. Energy 1979, 3, 323–328. [Google Scholar] [CrossRef]
- Katic, I.; Højstrup, J.; Jensen, N.O. A simple model for cluster efficiency. In Proceedings of the European Wind Energy Association Conference and Exhibition, Rome, Italy, 6–8 October 1986. [Google Scholar]
- Niayifar, A.; Porté-Agel, F. Analytical modeling of wind farms: A new approach for power prediction. Energies 2016, 9, 741. [Google Scholar] [CrossRef]
- Zong, H.; Porté-Agel, F. A momentum-conserving wake superposition method for wind farm power prediction. J. Fluid Mech. 2020, 889, A8. [Google Scholar] [CrossRef]
- Medici, D.; Alfredsson, P. Measurements on a wind turbine wake: 3D effects and bluff body vortex shedding. Wind Energy: Int. J. Prog. Appl. Wind Power Convers. Technol. 2006, 9, 219–236. [Google Scholar] [CrossRef]
- Howland, M.F.; Bossuyt, J.; Martínez-Tossas, L.A.; Meyers, J.; Meneveau, C. Wake structure in actuator disk models of wind turbines in yaw under uniform inflow conditions. J. Renew. Sustain. Energy 2016, 8, 043301. [Google Scholar] [CrossRef]
- Bastankhah, M.; Porté-Agel, F. Experimental and theoretical study of wind turbine wakes in yawed conditions. J. Fluid Mech. 2016, 806, 506–541. [Google Scholar] [CrossRef]
- Fleming, P.; Annoni, J.; Churchfield, M.; Martinez-Tossas, L.A.; Gruchalla, K.; Lawson, M.; Moriarty, P. A simulation study demonstrating the importance of large-scale trailing vortices in wake steering. Wind Energy Sci. 2018, 3, 243–255. [Google Scholar] [CrossRef]
- Bastankhah, M.; Porté-Agel, F. A new analytical model for wind-turbine wakes. Renew. Energy 2014, 70, 116–123. [Google Scholar] [CrossRef]
- Shapiro, C.R.; Gayme, D.F.; Meneveau, C. Modelling yawed wind turbine wakes: A lifting line approach. J. Fluid Mech. 2018, 841. [Google Scholar] [CrossRef]
- Bastankhah, M.; Porté-Agel, F. Wind farm power optimization via yaw angle control: A wind tunnel study. J. Renew. Sustain. Energy 2019, 11, 023301. [Google Scholar] [CrossRef]
- Medici, D. Experimental Studies of Wind Turbine Wakes: Power Optimisation and Meandering. Ph.D. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2005. [Google Scholar]
- Gebraad, P.; Teeuwisse, F.; Van Wingerden, J.; Fleming, P.A.; Ruben, S.; Marden, J.; Pao, L. Wind plant power optimization through yaw control using a parametric model for wake effects—A CFD simulation study. Wind Energy 2016, 19, 95–114. [Google Scholar] [CrossRef]
- Martínez-Tossas, L.A.; Churchfield, M.J.; Leonardi, S. Large eddy simulations of the flow past wind turbines: Actuator line and disk modeling. Wind Energy 2015, 18, 1047–1060. [Google Scholar] [CrossRef]
- Yang, X.; Sotiropoulos, F. A new class of actuator surface models for wind turbines. Wind Energy 2018, 21, 285–302. [Google Scholar] [CrossRef]
- Martinez-Tossas, L.; Howland, M.; Meneveau, C. Large eddy simulation of wind turbine wakes with yaw effects. In Proceedings of the 68th Annual Meeting of the APS Division of Fluid Dynamics (APS DFD GFM), Boston, MA, USA, 22–24 November 2015. [Google Scholar]
- King, J.; Fleming, P.; King, R.; Martínez-Tossas, L.A.; Bay, C.J.; Mudafort, R.; Simley, E. Controls-Oriented Model for Secondary Effects of Wake Steering. Wind Energy Sci. Discuss. 2020, 1–22. [Google Scholar] [CrossRef]
- Martínez-Tossas, L.A.; King, J.; Quon, E.; Bay, C.J.; Mudafort, R.; Hamilton, N.; Fleming, P. The curled wake model: A three-dimensional and extremely fast steady-state wake solver for wind plant flows. Wind Energy Sci. Discuss. 2020, 1–16. [Google Scholar] [CrossRef]
- Evensen, G. The ensemble Kalman filter: Theoretical formulation and practical implementation. Ocean Dyn. 2003, 53, 343–367. [Google Scholar] [CrossRef]
- Iglesias, M.A.; Law, K.J.; Stuart, A.M. Ensemble Kalman methods for inverse problems. Inverse Probl. 2013, 29, 045001. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Archer, C.L.; Vasel-Be-Hagh, A. Wake steering via yaw control in multi-turbine wind farms: Recommendations based on large-eddy simulation. Sustain. Energy Technol. Assess. 2019, 33, 34–43. [Google Scholar] [CrossRef]
- Barthelmie, R.J.; Frandsen, S.T.; Nielsen, M.; Pryor, S.; Rethore, P.E.; Jørgensen, H.E. Modelling and measurements of power losses and turbulence intensity in wind turbine wakes at Middelgrunden offshore wind farm. Wind Energy 2007, 10, 517–528. [Google Scholar] [CrossRef]
- Bossuyt, J.; Howland, M.F.; Meneveau, C.; Meyers, J. Measurement of unsteady loading and power output variability in a micro wind farm model in a wind tunnel. Exp. Fluids 2017, 58, 1. [Google Scholar] [CrossRef]
- Ghate, A.S.; Lele, S.K. Subfilter-scale enrichment of planetary boundary layer large eddy simulation using discrete Fourier–Gabor modes. J. Fluid Mech. 2017, 819, 494–539. [Google Scholar] [CrossRef]
- Howland, M.F.; Ghate, A.S.; Lele, S.K. Influence of the horizontal component of Earth’s rotation on wind turbine wakes. J. Phys. Conf. Ser. 2018, 1037, 072003. [Google Scholar] [CrossRef]
- Ghaisas, N.S.; Ghate, A.S.; Lele, S.K. Effect of tip spacing, thrust coefficient and turbine spacing in multi-rotor wind turbines and farms. Wind Energy Sci. 2020, 5, 51–72. [Google Scholar] [CrossRef]
- Zilitinkevich, S.; Esau, I. On integral measures of the neutral barotropic planetary boundary layer. Bound. Layer Meteorol. 2002, 104, 371–379. [Google Scholar] [CrossRef]
- Howland, M.F.; Ghate, A.S.; Lele, S.K. Influence of the geostrophic wind direction on the atmospheric boundary layer flow. J. Fluid Mech. 2020, 883, A39. [Google Scholar] [CrossRef]
- Wyngaard, J.C. Turbulence in the Atmosphere; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Calaf, M.; Meneveau, C.; Meyers, J. Large eddy simulation study of fully developed wind-turbine array boundary layers. Phys. Fluids 2010, 22, 015110. [Google Scholar] [CrossRef]
- Munters, W.; Meneveau, C.; Meyers, J. Turbulent inflow precursor method with time-varying direction for large-eddy simulations and applications to wind farms. Bound. Layer Meteorol. 2016, 159, 305–328. [Google Scholar] [CrossRef]
- Howland, M.F.; Ghate, A.S.; Lele, S.K. Coriolis effects within and trailing a large finite wind farm. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 0994. [Google Scholar]
- Leibovich, S.; Lele, S. The influence of the horizontal component of Earth’s angular velocity on the instability of the Ekman layer. J. Fluid Mech. 1985, 150, 41–87. [Google Scholar] [CrossRef]
- Schreiber, J.; Bottasso, C.L.; Salbert, B.; Campagnolo, F. Improving wind farm flow models by learning from operational data. Wind Energy Sci. Discuss. 2019. [Google Scholar] [CrossRef]
- Barthelmie, R.J.; Jensen, L. Evaluation of wind farm efficiency and wind turbine wakes at the Nysted offshore wind farm. Wind Energy 2010, 13, 573–586. [Google Scholar] [CrossRef]
- Abkar, M.; Sørensen, J.N.; Porté-Agel, F. An analytical model for the effect of vertical wind veer on wind turbine wakes. Energies 2018, 11, 1838. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Steering | Superposition | Epochs | ||
|---|---|---|---|---|---|
| Wind turbine column alignment | |||||
| NA | - | - | - | - | |
| NL | ✓ | Linear | 2000 | ||
| NL1 | ✓ | Linear | 1 | ||
| NC | ✓ | Convective | 2000 | ||
| NC1 | ✓ | Convective | 1 | ||
| NMS1 | ✓ | Mod., Sec. | 1 | ||
| NCS1 | ✓ | Conv., Sec. | 1 | ||
| NFCS1 | ✓ | Conv., Sec. | 0 | ||
| NFCS2 | ✓ | Conv., Sec. | 0 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Howland, M.F.; Dabiri, J.O. Influence of Wake Model Superposition and Secondary Steering on Model-Based Wake Steering Control with SCADA Data Assimilation. Energies 2021, 14, 52. https://doi.org/10.3390/en14010052
Howland MF, Dabiri JO. Influence of Wake Model Superposition and Secondary Steering on Model-Based Wake Steering Control with SCADA Data Assimilation. Energies. 2021; 14(1):52. https://doi.org/10.3390/en14010052
Chicago/Turabian StyleHowland, Michael F., and John O. Dabiri. 2021. "Influence of Wake Model Superposition and Secondary Steering on Model-Based Wake Steering Control with SCADA Data Assimilation" Energies 14, no. 1: 52. https://doi.org/10.3390/en14010052
APA StyleHowland, M. F., & Dabiri, J. O. (2021). Influence of Wake Model Superposition and Secondary Steering on Model-Based Wake Steering Control with SCADA Data Assimilation. Energies, 14(1), 52. https://doi.org/10.3390/en14010052