Multi-Target Control Strategy of DFIG Using Virtual Synchronous Generator Based on Extended Power Resonance Control under Unbalanced Power Grid



Abstract
:
1. Introduction
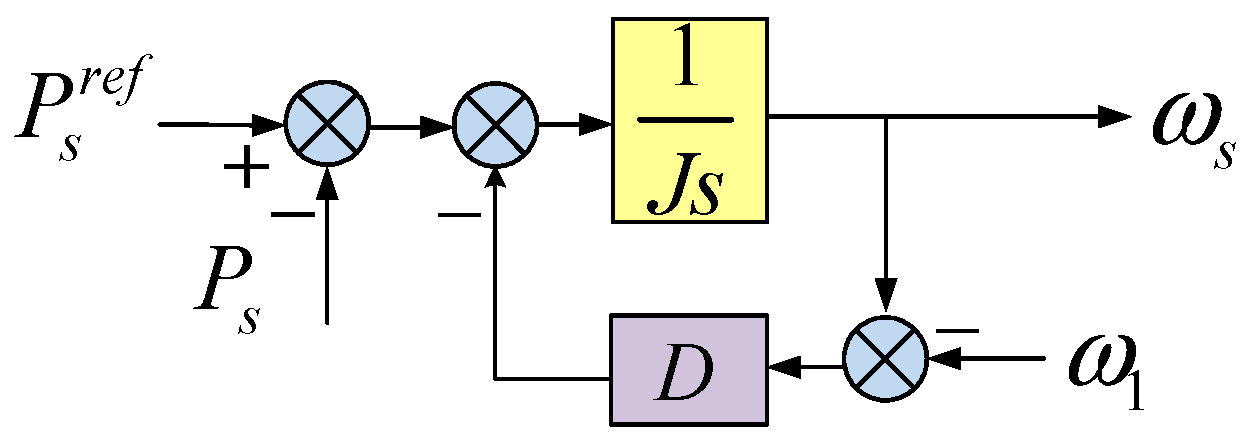
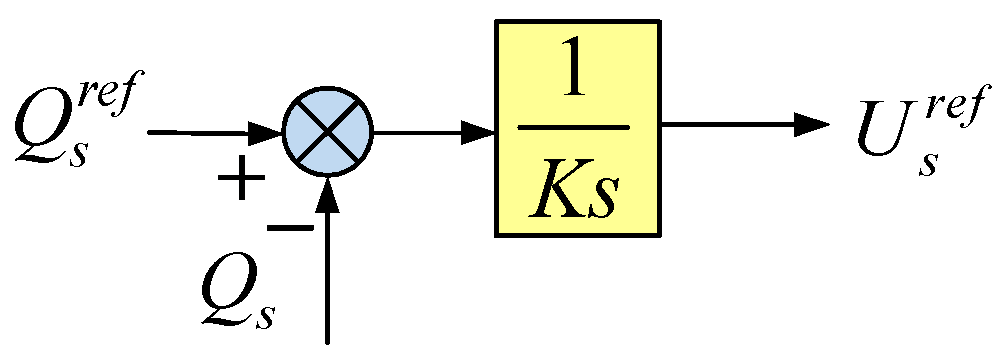
2. Basic Principle of VSG Control for DFIG
3. Impact of Unbalanced Grid on DFIG and VSG
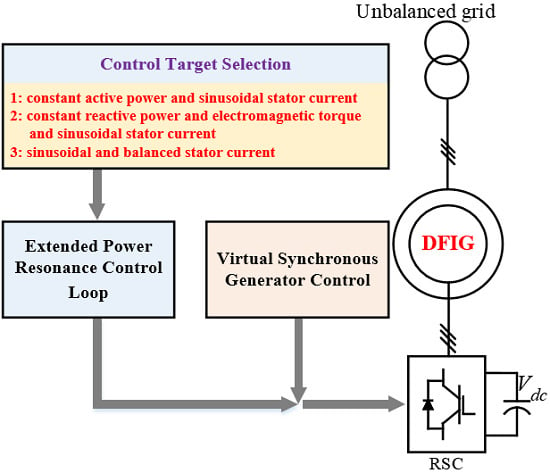
4. Multi-Target Operation Strategies of VSG Control under Unbalanced Grid
4.1. Control Target Analysis
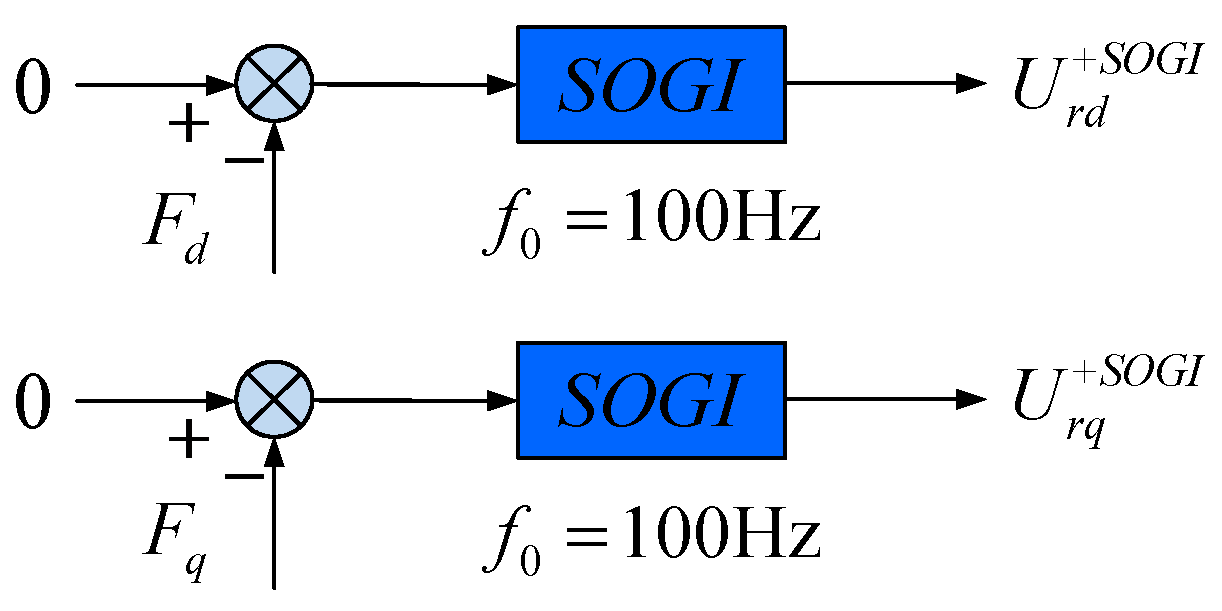
4.2. Design Process of Multi-Target Control Based on Resonant Controller
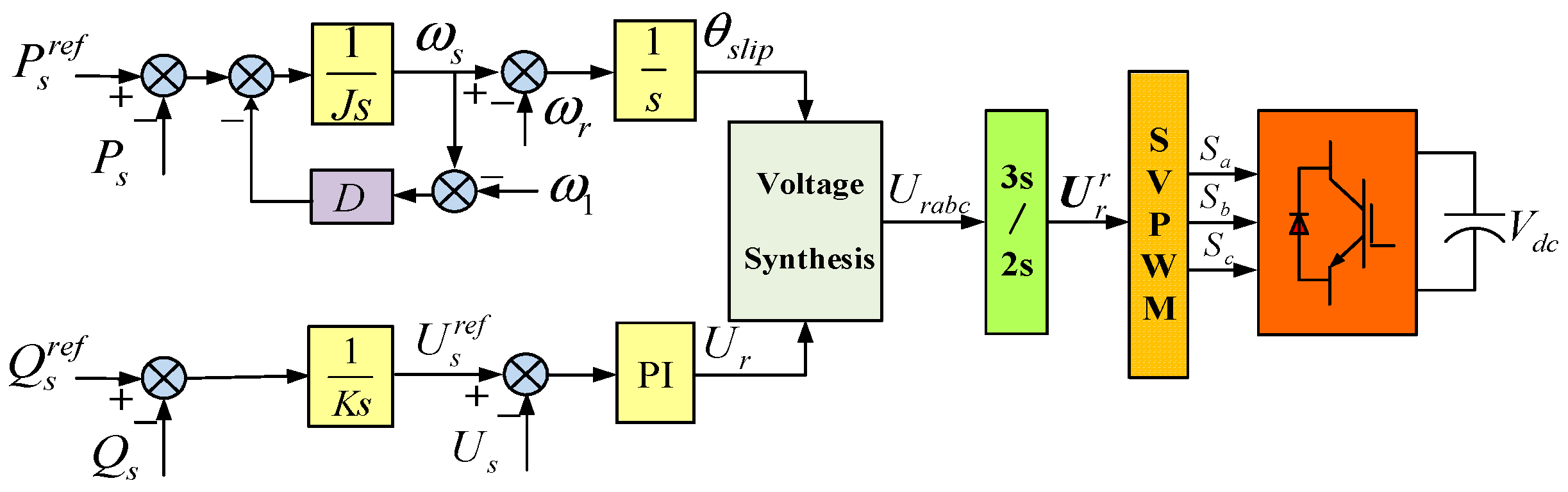
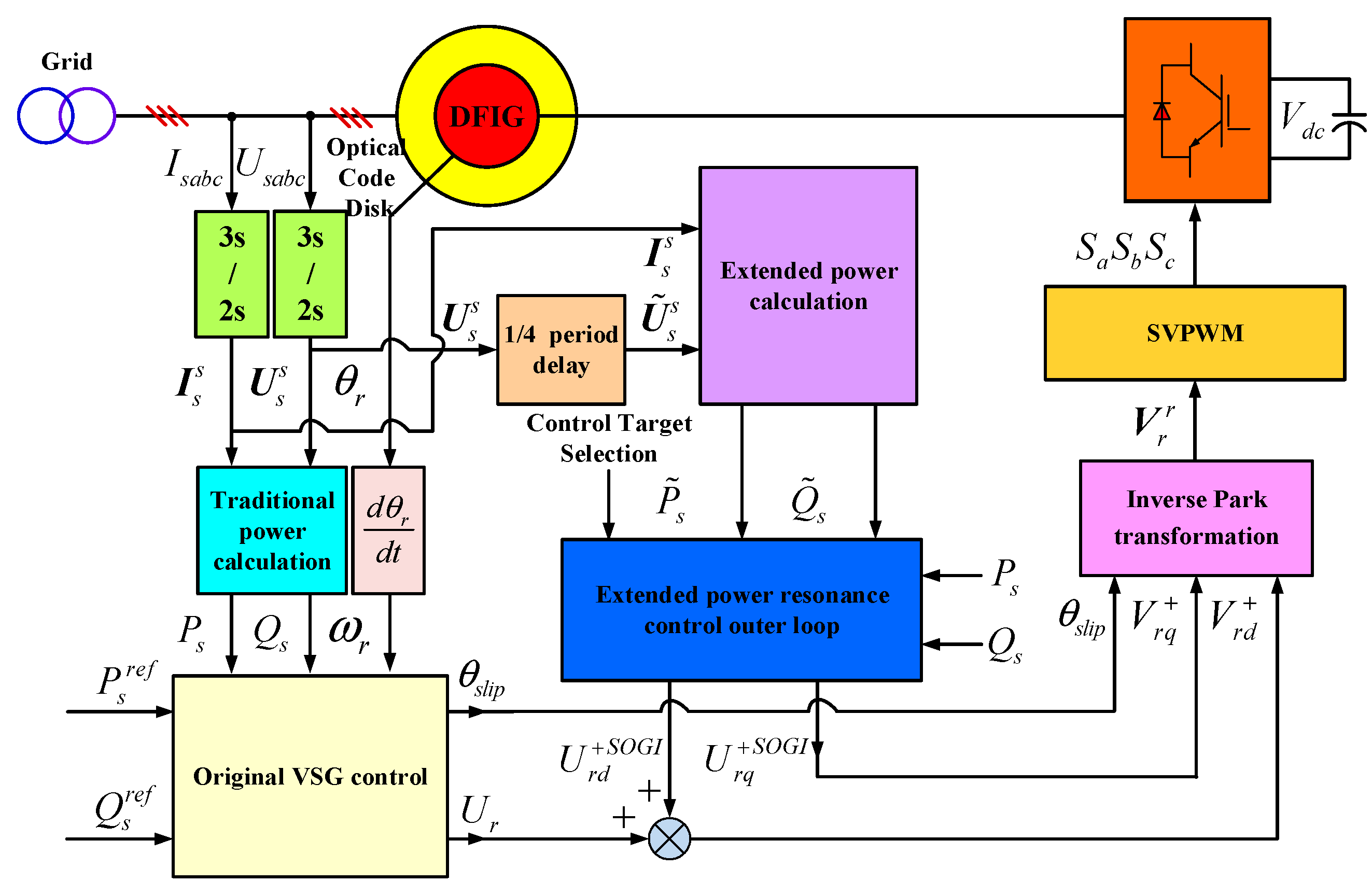
4.3. Control Block Diagram under Unbalanced Power Grid
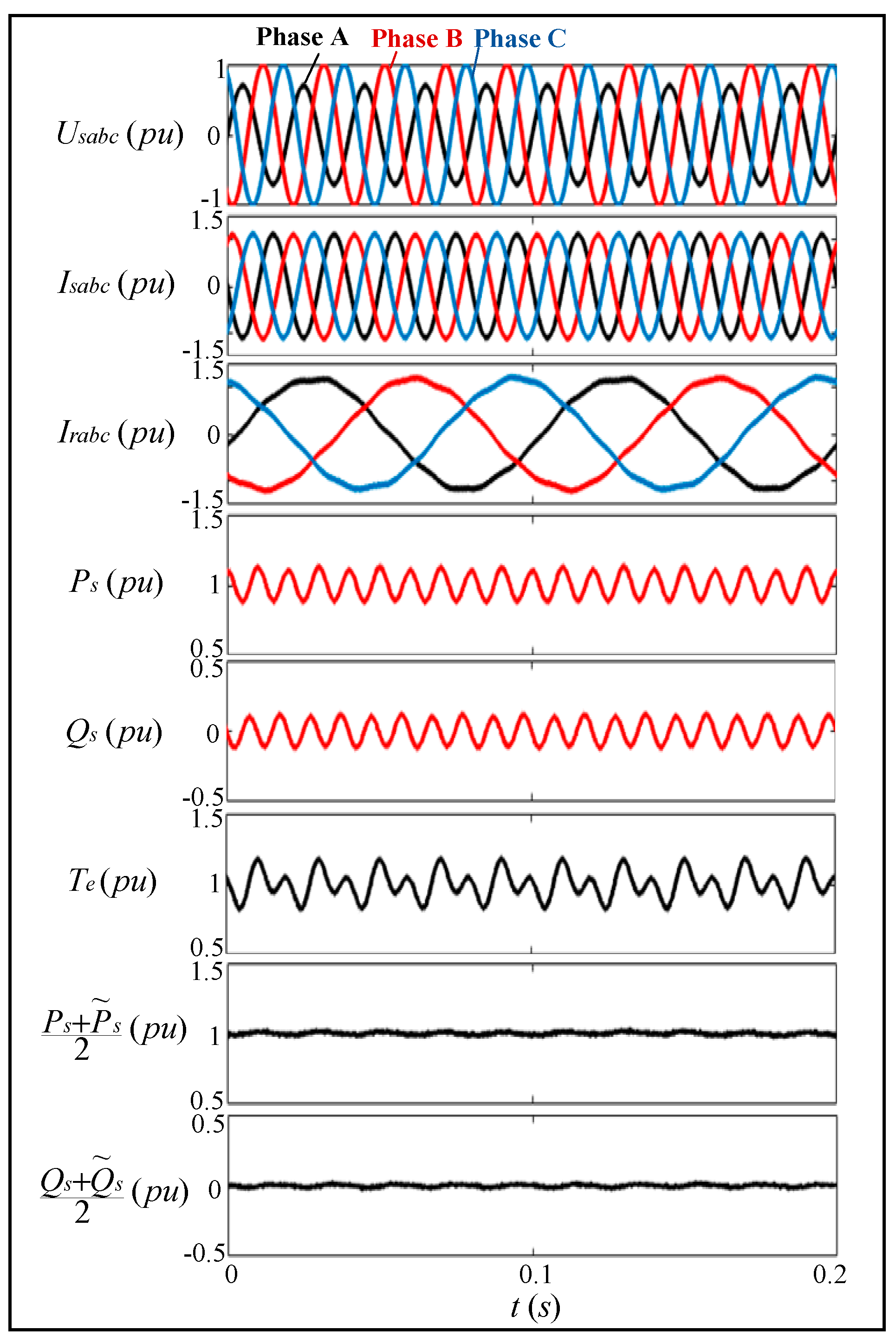
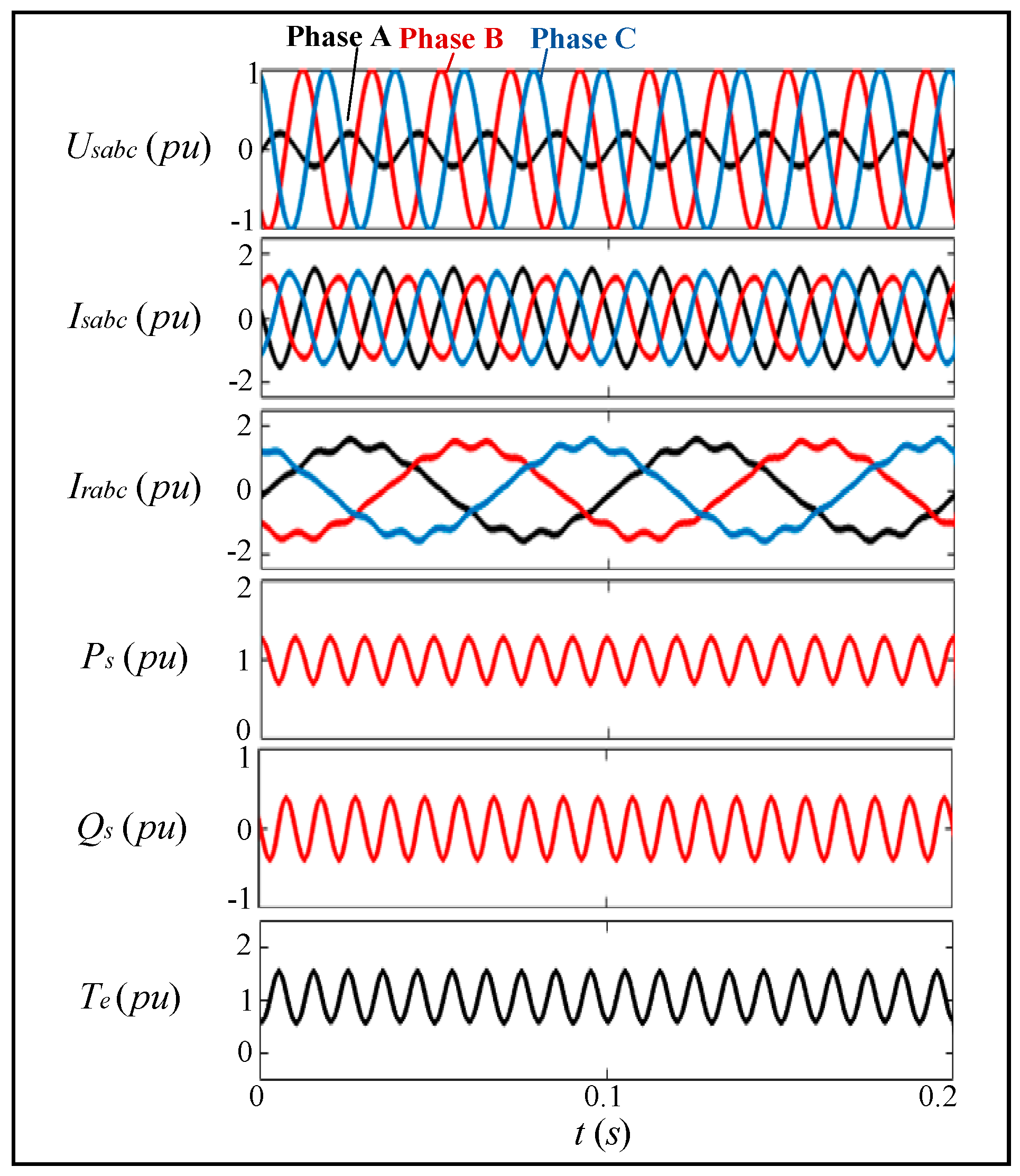
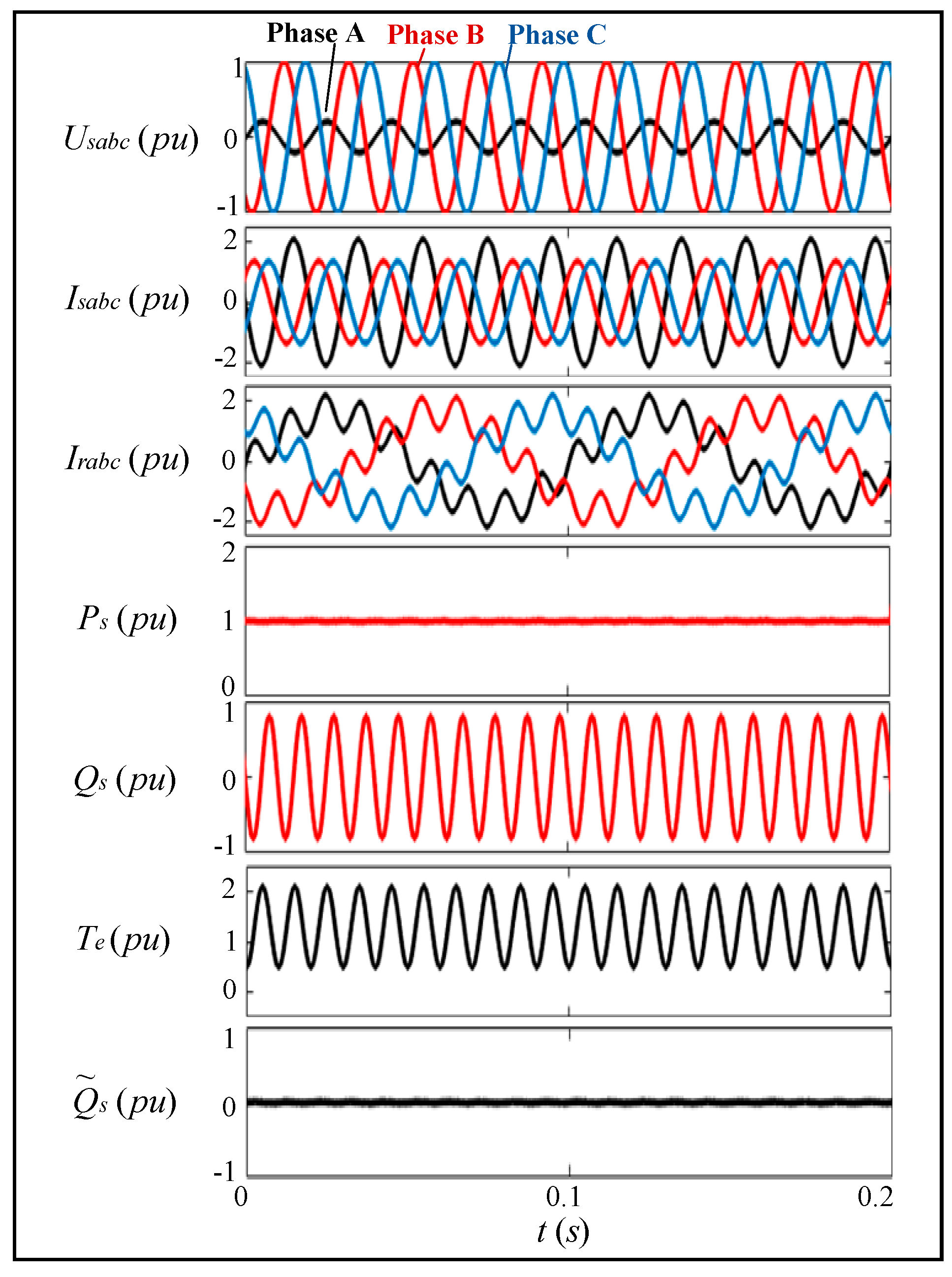
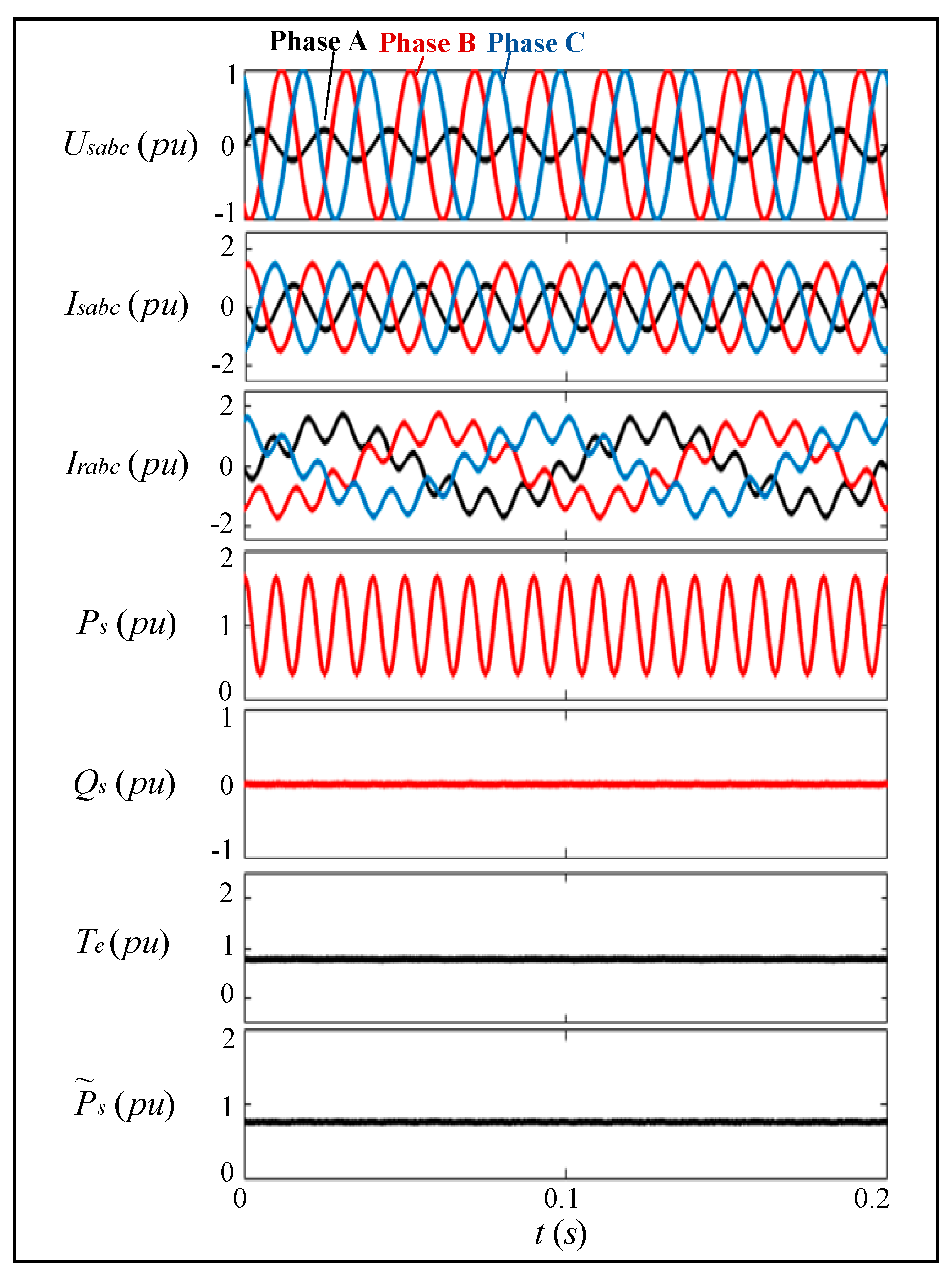
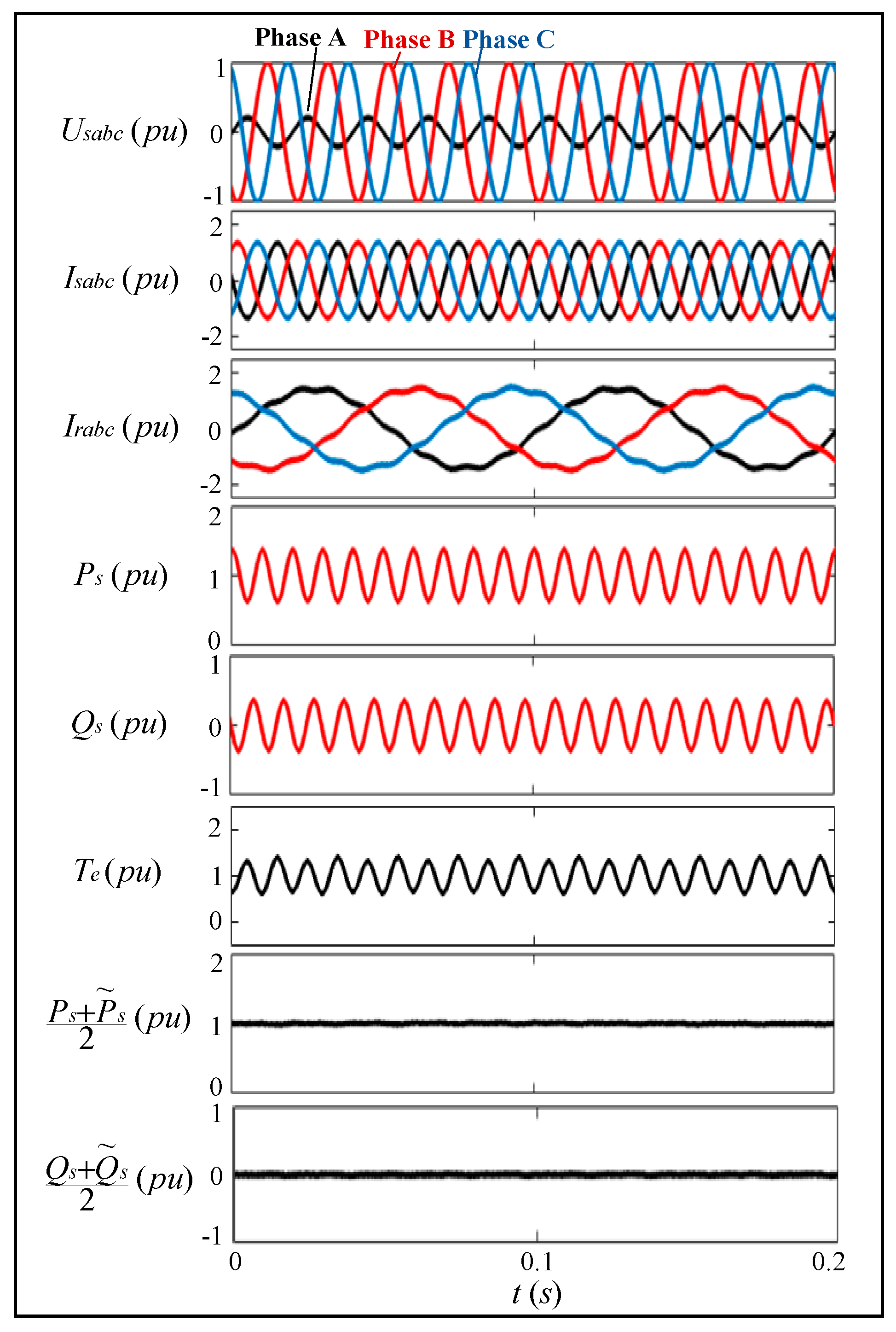
5. Simulation Studies
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ashabani, M.; Mohamed, Y. Integrating VSCs to weak grids by nonlinear power damping controller with self-synchronization capability. IEEE Trans. Power Syst. 2014, 29, 805–814. [Google Scholar] [CrossRef]
- Dyanamina, G.; Kumar, A. Performance improvement of grid connected DFIG fed by three level diode clamped MLI using vector control. In Proceedings of the IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 560–565. [Google Scholar]
- Djilali, L.; Sanchez, E.N.; Belkheiri, M. Neural sliding mode field oriented control for DFIG based wind turbine. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Banff, AB, Canada, 5–8 October 2017; pp. 2087–2092. [Google Scholar]
- Luckins, A.; Duttagupta, S.P. Model predictive control strategy for direct drive PMSG and DFIG for ocean wave energy converter system. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–4. [Google Scholar]
- Bevrani, H.; Ise, T.; Miura, Y. Virtual synchronous generators: A survey and new perspectives. Int. J. Electr. Power Energy Syst. 2014, 54, 244–254. [Google Scholar] [CrossRef]
- He, X.; Geng, H.; Yang, G.; Zou, X. VSG control for DFIG-based islanded wind farm with LCC-HVDC integration. In Proceedings of the IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–9 August 2018; pp. 1–5. [Google Scholar]
- Deepak, C.M.; Vijayakumari, A. Virtual inertia control for transient active power support from DFIG based wind electric system. In Proceedings of the 2nd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology, Bangalore, India, 19–20 May 2017; pp. 809–814. [Google Scholar]
- Shi, K.; Ye, H.; Song, W.; Zhou, G. Virtual inertia control strategy in microgrid based on virtual synchronous generator technology. IEEE Access 2018, 6, 244–254. [Google Scholar] [CrossRef]
- Wang, S.; Hu, J.; Yuan, X. Virtual synchronous control for grid-connected DFIG-based wind turbines. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 932–944. [Google Scholar] [CrossRef]
- Asha Rani, M.A.; Nagamani, C. An effective reference generation scheme for DFIG with unbalanced grid voltage. IEEE Trans. Sustain. Energy 2014, 5, 1010–1018. [Google Scholar] [CrossRef]
- Yuan, G.; Liang, R.; Hou, X. Control strategy of DFIG under unbalanced grid voltage conditions based on complex-vector-resonant regulator. In Proceedings of the 20th International Conference on Electrical Machines and Systems, Sydney, Australia, 11–14 August 2017; pp. 1–6. [Google Scholar]
- Abad, G.; Rodríguez, M.Á.; Iwanski, G.; Poza, J. Direct power control of doubly-fed-induction-generator-based wind turbines under unbalanced grid voltage. IEEE Trans. Power Electron. 2010, 25, 442–452. [Google Scholar] [CrossRef]
- Santos-Martin, D.; Rodriguez-Amenedo, J.L.; Arnalte, S. Direct power control applied to doubly fed induction generator under unbalanced grid voltage conditions. IEEE Trans. Power Electron. 2008, 23, 2328–2336. [Google Scholar] [CrossRef]
- Cheng, P.; Nian, H. Collaborative control of DFIG system during network unbalance using reduced-order generalized integrators. IEEE Trans. Energy Convers. 2015, 30, 453–464. [Google Scholar] [CrossRef]
- Reyes, M.; Rodriguez, P. Enhanced decoupled double synchronous reference frame current controller for unbalanced grid-voltage conditions. IEEE Trans. Power Electron. 2012, 27, 3934–3943. [Google Scholar] [CrossRef]
- Nian, H.; Cheng, P. Independent operation of DFIG-based WECS using resonant feedback compensators under unbalanced grid voltage conditions. IEEE Trans. Power Electron. 2015, 30, 3650–3661. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, W. Improved dual-PI rotor current control scheme for a wind-driven DFIG during asymmetrical grid voltage dips. In Proceedings of the IEEE International Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009; pp. 171–176. [Google Scholar]
- Hu, J.; He, Y. Reinforced control and operation of DFIG-based wind-power-generation system under unbalanced grid voltage conditions. IEEE Trans. Energy Convers. 2009, 24, 905–915. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, J.; Dorrell, D.G. Model-predictive direct power control of doubly-fed induction generators under unbalanced grid voltage conditions in wind energy applications. IET Renew. Power Gener. 2014, 8, 687–695. [Google Scholar] [CrossRef]
- Sun, D.; Wang, X. A sliding-mode direct power control strategy for DFIG under both balanced and unbalanced grid conditions using extended active power. IEEE Trans. Power Electron. 2018, 33, 1313–1322. [Google Scholar] [CrossRef]
- Jiao, Y.; Nian, H.; He, G. Control strategy based on virtual synchronous generator of DFIG-based wind turbine under unbalanced grid voltage. In Proceedings of the 20th International Conference on Electrical Machines and Systems, Sydney, Australia, 11–14 August 2017; pp. 1–6. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motor Parameters | Parameter Values |
| Nominal l-l voltage Us0 | 690 V(rms) |
| Rated power Ps0 | 2 MW |
| Rated Frequency ω1 | 50 Hz |
| Stator leakage inductance Lls | 0.102 pu |
| Rotor leakage inductance Llr | 0.11 pu |
| Mutual inductance Lm | 11.3 pu |
| Stator resistance Rs | 0.0108 pu |
| Rotor resistance Rr | 0.0121 pu |
| Turns ratio (rotor over stator) | 2.835 |
| DC Voltage Vdc slip ratio s | 1200 V 0.2 |
| Control Parameters | Parameter Values |
| Virtual inertia J | 0.2 |
| Damping coefficient D | 3 |
| Excitation adjustment factor K | 0.33 |
| PI Proportionality coefficient Kp | 1 |
| PI Integral coefficient Ki | 2 |
| Resonator control coefficient kr | 100 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, D.; Wang, Y.; Jiang, T.; Wang, X.; Sun, J.; Nian, H. Multi-Target Control Strategy of DFIG Using Virtual Synchronous Generator Based on Extended Power Resonance Control under Unbalanced Power Grid. Energies 2020, 13, 2232. https://doi.org/10.3390/en13092232
Sun D, Wang Y, Jiang T, Wang X, Sun J, Nian H. Multi-Target Control Strategy of DFIG Using Virtual Synchronous Generator Based on Extended Power Resonance Control under Unbalanced Power Grid. Energies. 2020; 13(9):2232. https://doi.org/10.3390/en13092232
Chicago/Turabian StyleSun, Dan, Yangming Wang, Tianlong Jiang, Xiaohe Wang, Jun Sun, and Heng Nian. 2020. "Multi-Target Control Strategy of DFIG Using Virtual Synchronous Generator Based on Extended Power Resonance Control under Unbalanced Power Grid" Energies 13, no. 9: 2232. https://doi.org/10.3390/en13092232
APA StyleSun, D., Wang, Y., Jiang, T., Wang, X., Sun, J., & Nian, H. (2020). Multi-Target Control Strategy of DFIG Using Virtual Synchronous Generator Based on Extended Power Resonance Control under Unbalanced Power Grid. Energies, 13(9), 2232. https://doi.org/10.3390/en13092232