1. Introduction
Power systems are nonlinear, large-scale, widely dispersed systems with many different interconnected components. Typically, power systems controls are structured in several hierarchical levels (primary, secondary, tertiary). The primary level control of power systems plays a central role in maintaining transient stability and obtaining a desired system performance. Generator excitation control is employed at the primary level in order to improve the power system stability, especially after short-circuit faults or other major disturbances. This is achieved with the use of supplementary excitation control devices called power systems stabilizers (PSSs). Conventional PSS are designed using linear control approaches and are combined with the automatic voltage regulator (AVR) part to result in a common form, known as an AVR/PSS controller. In the case of a synchronous generator infinite bus (SGIB) power system, linear excitation controllers have been proposed in [
1], which are based on linearizations around the operating point. Nonlinear control theory, on the other hand, seems to provide a more reliable and robust tool for the analysis and design of power systems [
2]. Under this view, several nonlinear excitation control methods have been proposed including feedback linearization [
3,
4], adaptive control [
4,
5,
6,
7], and robust designs [
8,
9].
Beyond the traditional control of power systems through the excitation circuits of the rotating generators, static power-electronic devices are proposed to be installed in the power transmission system to support their transient behavior. Such static power-electronic components are the flexible alternating current transmission system (FACTS) devices that are suitably controlled to increase the power transfer capability and network stability [
10,
11]. Static var compensators (SVCs) are FACTS devices that correct the power factor and the grid voltage at the point of connection [
12,
13,
14]. In this paper, we consider a widely used thyristor controlled reactor-fixed capacitor (TCR-FC) SVC [
15,
16]. Voltage is regulated at the SVC bus as follows: If voltage amplitude is needed to decrease (i.e., in case of capacitive load conditions), the SVC uses TCRs to absorb vars from the system. If voltage amplitude is needed to increase (in case of inductive load conditions), the capacitor banks are automatically switched-in to inject vars to the system. In several studies [
12,
13,
14,
15,
16,
17,
18,
19], coordinated excitation and SVC control has been considered for transient stability enhancement and voltage regulation.
Recent advances in wide-area measurement systems (WAMS) technology have initiated the use of phasor measurement unit (PMU) devices for controlling power systems. Communication time-delays are inevitably introduced during the transmission of wide-area signals. The effect of these delays on the overall power system stability has attracted significant research interest [
20,
21] because they constitute additionally negative factors in designing an effective control.
In this paper, we consider a single machine infinite bus power system with a TCR-FC SVC connected in the tie-lines between the generator and the infinite bus. The synchronous generator is represented by its third-order nonlinear model and the SVC dynamics from its first-order model. A feedback linearization approach is used, resulting in a linear dynamic system representation with two controlled inputs, the generator excitation input and the input of the SVC regulator. Both inputs are used in conjunction to formulate a faster and effective feedback loop that can substantially improve the overall system transient response and stability. Applying backstepping-based techniques and using distant measurements from the generator side, an excitation and a nonlinear SVC controller are designed. As the time delays in the measurements are essential for the whole design, a detailed nonlinear theoretical analysis is conducted that considers this influence and, as shown in the paper, proves that as long as the time delays are sufficiently small, then all closed-loop signals are bounded and the power angle deviations exponentially converge to zero. The design is completed by a coordinated frequency and voltage controller that utilizes a soft switching mechanism for both the excitation input and the SVC compensator, which extends the fuzzy switching coordination approach of [
22]. The excitation input initially employs the proposed nonlinear control, while in the sequel, after the large frequency deviations are mitigated, it switches in a smooth way to a classical automatic voltage regulator and power system stabilizer (AVR/PSS). It is apparent that also in the case when the delays are not sufficiently small, then a classical proportional integral (PI) voltage controller is used. The simulation results indicate that the proposed approach yields better results than the simple AVR/PSS and PI SVC control.
The main contributions and novelties of this work with respect to the related literature [
13,
14,
15,
16,
17,
18,
19,
22] are summarized as follows:
The rest of the paper is organized as follows. In
Section 2, the mathematic model of the system is outlined and the problem is formulated. The backstepping/feedback linearization method is used in
Section 3 to design the excitation and SVC controllers. In
Section 4, a detailed stability analysis for the closed-loop system is carried out. The coordinated frequency and voltage control is proposed in
Section 5. Simulation results are given in
Section 6. Finally, in
Section 7, some concluding remarks are given.
2. Mathematical Model and Problem Formulation
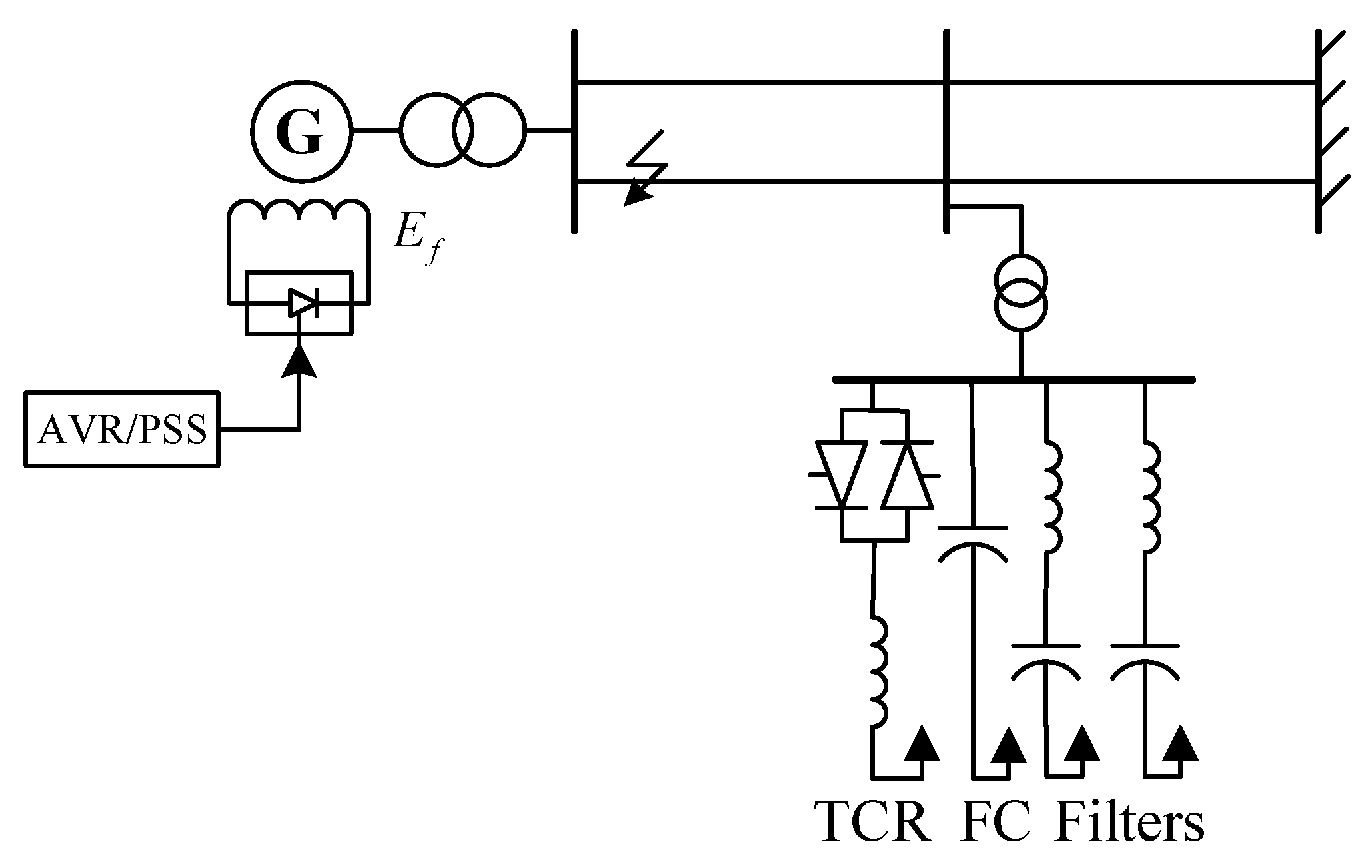
A simplified model for a generator and an SVC system, which forms a three-bus system shown in
Figure 1, is considered. The SVC is connected to a bus located at an intermediate point of the transmission line.
The classical third-order single-axis dynamic generator model [
23] is used for the design of the excitation controller, which neglects dynamics with very short time constants, and is given by the following equations:
where
In this model, the sub-transient and damper windings effects are neglected. Moreover, the flow terms and in the stator voltage equations are omitted as they are considered negligible compared with the speed voltage terms.
We consider a widely used TCR-FC SVC (see
Figure 1), which consists of a fixed capacitor in shunt with a thyristor-controlled inductor. Let
be the susceptance of the capacitor in SVC and
be the susceptance of the inductor in SVC. Let it be that
is regulated by the firing angle of the thyristor. Then, the equivalent dynamic model of SVC can be written as [
15,
16,
17]
where
is the initial susceptance of the TCR,
is the time constant of the SVC regulator,
the gain, and
the input of the SVC regulator.
The coordinated control design for the generator and the static VAR compensator must take into account the SVC controller effect on the generator dynamics. From the network topology depicted in
Figure 1, the active electrical power is given by
where
is the total reactance value.
To examine the transient system response, a symmetrical three-phase short-circuit fault in the tie-line connecting the generator and the static VAR compensator is considered, as shown in
Figure 1. During the three-phase short-circuit fault, the total reactance value
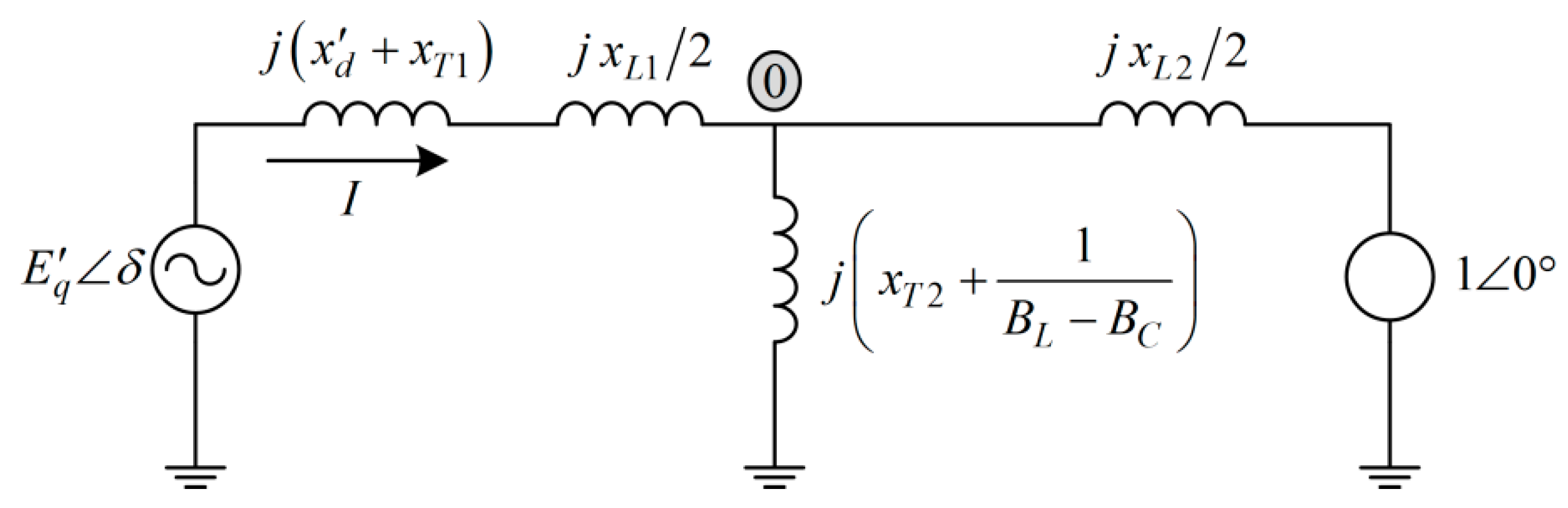
Χ changes. An analysis of the equivalent circuits pre-fault, during fault, and post-fault yields the respective values of
. These network configurations are shown in
Figure 2,
Figure 3 and
Figure 4, whereas the detailed calculations are given in
Appendix A.
Specifically, the total reactance value
before the fault is
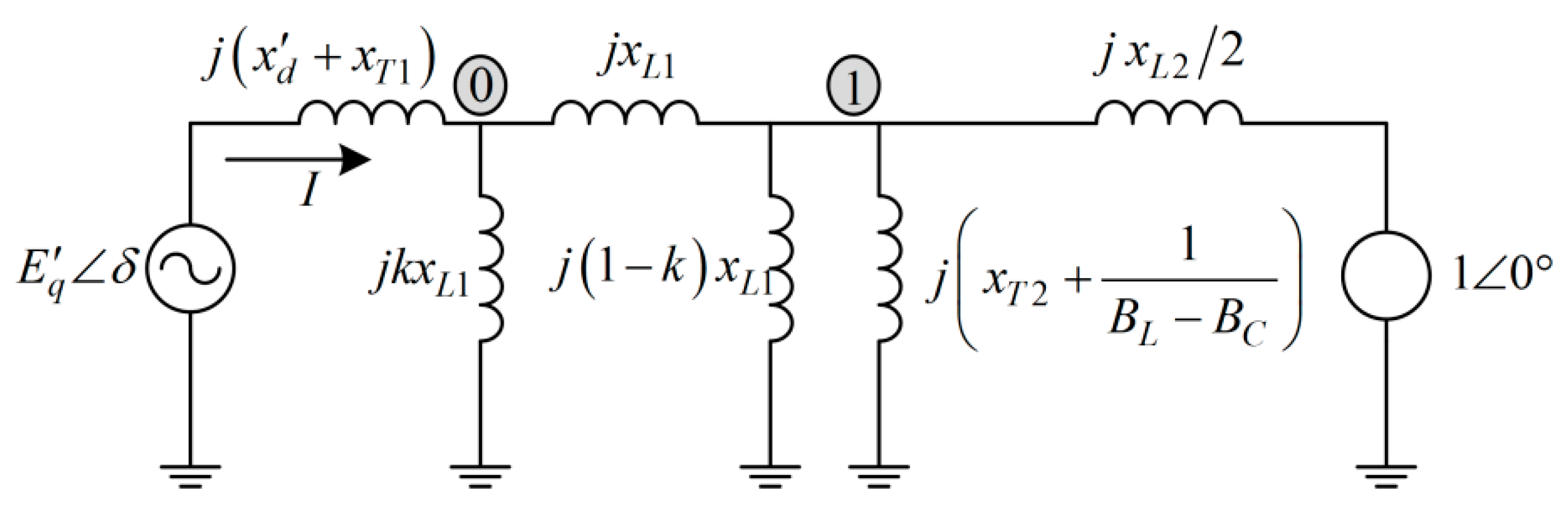
During the fault, the total reactance is changed to
The constant is determined by the fault position in the line between the generator bus and the SVC bus. The smaller is, the closer the the fault is to the generator bus. If is close to one, then the fault position is close to the SVC bus, whereas denotes a fault at the middle of this line.
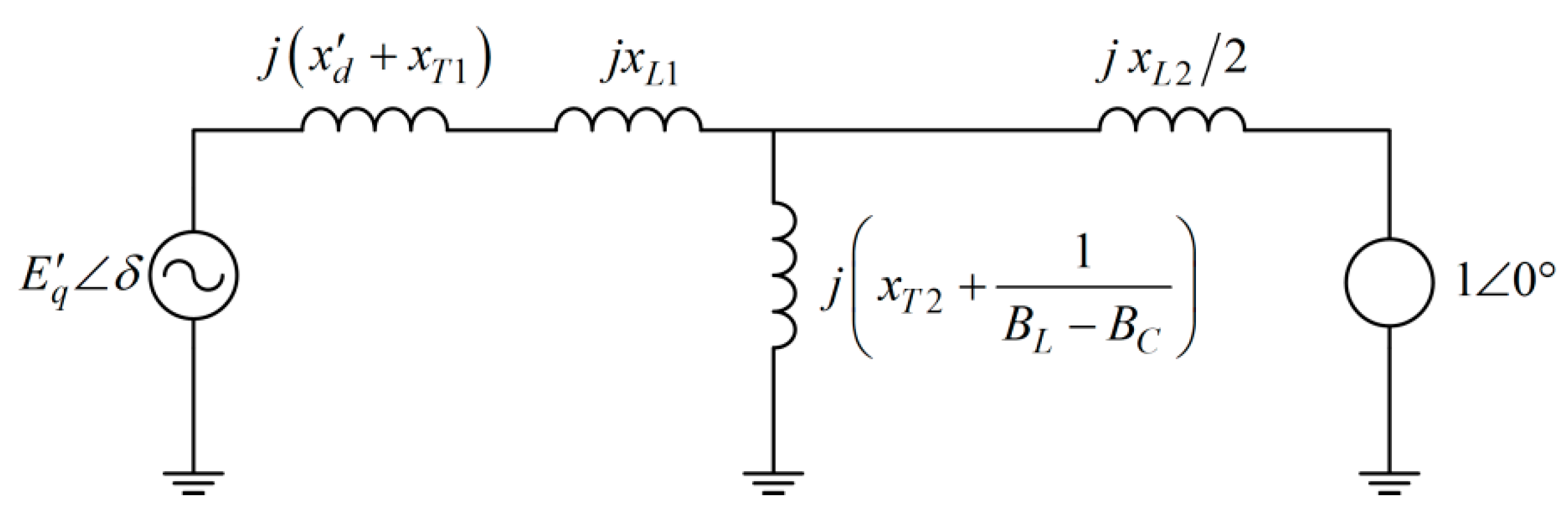
After the fault is removed (by opening the brakers), it takes the following form:
To proceed with the control design, we differentiate (7) to obtain the rate of change of
as
Considering (8)–(10), the time derivative of
for the three different modes can be computed as
where
is a constant with the following values:
Expressions (11), (12), and (13) are used in the following design procedure.
3. Control Design Based on Backstepping and Feedback Linearization Techniques
The control objective is to design the excitation input
and the SVC controller
such that the angle deviations
converge exponentially fast to zero. To that end, we adopt a backstepping approach in the control design for the transient stability enhancement similar to [
3]. Let the first error variable be
with dynamics
. If we define the first virtual control law
with
, then for the new error variable,
, and the nonnegative function,
, we have that
. The dynamics of
are given by
If we select the second virtual control law as
with the third error variable
, then the dynamics of
are
. The overall error variable transformation is
Then, the dynamics of the
error variable are described by
where expressions (11) to (13) are taken into account.
We then select a nonlinear feedback linearizing excitation control law of the following form:
and SVC control law
with gain
. It is noticed that in (19), the time delay inserted from the
measurement and feedback denoted by
is taken into account, and the following delayed ODE is obtained:
where
is a continuous initial function with bounded norm defined in
The delay is assumed to be bounded with the bounded rate of change, that is, and for some . The delayed term in (19) is the result of the fact that the variable does not involve local SVC measurements, but uses distant, and thus delayed, measurements from the generator. Thus, at time , the is available for use in the SVC controller.
4. Overall System Stability Analysis
An analysis will be carried out next to prove that, under certain conditions on the magnitude of the time-delay, the error variable converges exponentially fast to zero.
It is worth noting that all solutions of (20) are also solutions of
The solution of (21) is given by
which in turn yields
Consider now the functional differential equation
where
and
. By direct substitution, one can see that the solution of (24) is
Using the mean value theorem repeatedly, one concludes that there exist constants
, such that
Thus, from (25) and (27), we arrive at
We will prove next that, for a proper selection of
, the function
is an upper bound of
. Alternatively,
can be written as
A comparison of
with
will yield the desired stability result. To this end, we define the error variable as
For
, from (23) and (29), we have the following:
The above inequality can be written equivalently as
The integral term within (32) can be bounded as follows
Consider now the equation
The left hand side (l.h.s.) of (34) is a strictly increasing function of
, whereas the right hand side (r.h.s.) is a strictly decreasing function of
in
. Thus, a unique, positive solution of (34) exists if and only if the value of the r.h.s. is greater than the value of the l.h.s. for
. This condition yields
Hence, inequality (35) provides an upper bound on the time delays that can be allowed.
Furthermore, using (26) and (28), we can prove that
If we choose the initial condition
, such that
then from (32), (36), and (37), we have
while using (37) in (30) results in
A contradiction argument can be used to prove that
. Assume the opposite, that is,
for some
. Then, for some sufficiently small
, there exists
, for which
. From (38) and (35), we have that
which yields the desired contradiction. Hence,
, and thus
that is, the error variable
converges exponentially to zero. Furthermore, if we define the nonnegative function
, then we have
with
for some
.
The above differential inequality can be set in integral form as follows:
Applying the Gronwall–Bellman Lemma in (43), we obtain
which yields
Hence, it holds true that
which guarantees exponential stability of the equilibrium
. Thus, the following theorem has been proven.
Theorem 1. Consider the SGIB with SVC system defined by (1)–(6), (11), and (12). If the generator excitation input is selected as in (18) and the SVC control as in (19) with time varying delay bound satisfying (35), then all closed-loop signals remain bounded and the power angle deviations exponentially converge to zero.
The previous analysis has clearly shown that distant delayed measurements can be used in the static var compensator control law for improving the transient stability of SGIB power system.
5. Coordinated Frequency and Voltage Control
The proposed nonlinear feedback linearizing controls ensure convergence of the power angles to their pre-fault values. However, this property is not desirable for a network changing topology because, in this case, the steady state voltages might deviate from the nominal ones. To address this issue, we adopt and modify the approach firstly used in [
22], where a coordinated voltage and frequency scheme was proposed. The coordinated control scheme retains the transient behavior of the nonlinear controls (faster and better than the AVR/PSS), while ensuring voltage regulation similar to an AVR/PSS. In the coordinated control scheme, the nonlinear controller takes over right after the fault, switching to an AVR/PSS controller after the large frequency deviations have been eliminated. This controller transition is implemented with a soft switching algorithm based on the frequency deviations
. Specifically, the following simple Takagi–Sugeno–Kang fuzzy rules are employed for the controller selection:
where
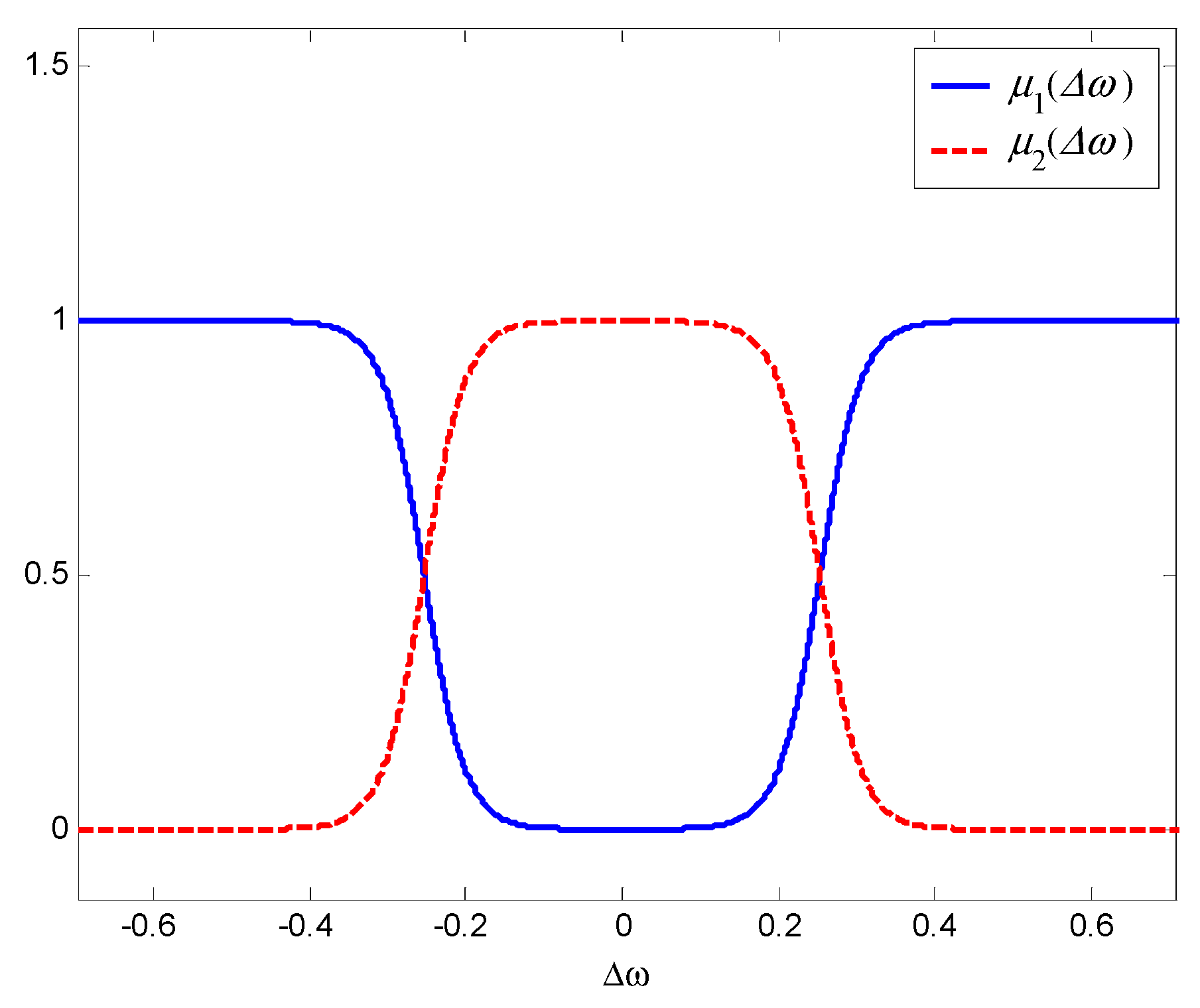
By choosing the membership functions
which represent the linguistic values LARGE and SMALL for the fuzzy variable
(see
Figure 5), the control input takes the following form:
This switching approach can also be utilized in the SVC compensator design. Specifically, a coordinated control strategy can be used in the SVC, which ensures that, initially, the power angle generator oscillations are rapidly damped, and then the SVC bus voltage is regulated towards its nominal value. To this end, a soft switching approach is adopted. The controllers switch when the large power angle deviations have been sufficiently mitigated so that the ancillary action of the SVC controller is no longer needed. The magnitude of the frequency deviation can serve as a switching criterion. In the new steady state, the SVC controller is transformed to a PI controller of the following form:
and the combined control law is then
Obviously, the control law that employs delayed generator measurements can improve the transient stability only if the magnitude of the communication delays is small enough. After a careful examination of the simulation studies and taking into account the fact that the first peak in the oscillatory power angle response occurs at about 1 s after fault, a critical time of approximately 250 ms after fault can be defined. All measurements after a fault and up to this time can be used in the scheme we described above. Thus, the control law (51) should be modified to ensure that, for delays larger than 250 ms, a classical voltage PI is used, whereas, for delays smaller than or equal to 250 ms, the proposed nonlinear controller is used.
The following Takagi–Sugeno fuzzy rules implement the overall soft switching approach.
The membership functions
and
are selected for the linguistic values LARGE and SMALL of the fuzzy variable
. Thus, the SVC controller is given by
It is obvious from the previous discussion that the magnitude of the communication delays is crucial. If these are large, then the proposed overall control scheme cannot provide the desired improvement as it will work only as a voltage controller. However, the latency times in current WLAN communication networks (3G, 4G) do not exceed 100 ms. They are even smaller in ADSL and VDSL Internet connections. Thus, both are viable options for communicating the distant measurements.
6. Simulation Studies
The simulation studies were performed in MATLAB/Simulink on an Intel Core i3-2348M PC at 2.30 GHz with 4 GB RAM. For our simulation scenario, the system parameters are adopted from [
16], that is,
p.u.,
s,
p.u.,
p.u.,
p.u.,
p.u.,
s,
rad/s,
p.u.,
p.u.,
s, and
. The operating point considered is
,
p.u., and
p.u. The nonlinear excitation controller parameters are chosen as
,
,
, and the gain in the nonlinear SVC controller is taken as
. The AVR/PSS parameters are selected to be
,
,
,
,
, and
, and the gains of the PI voltage controller are chosen as
and
.
A symmetrical three-phase fault occurs at time
in the middle of one of the two lines connecting the generator and SVC buses (
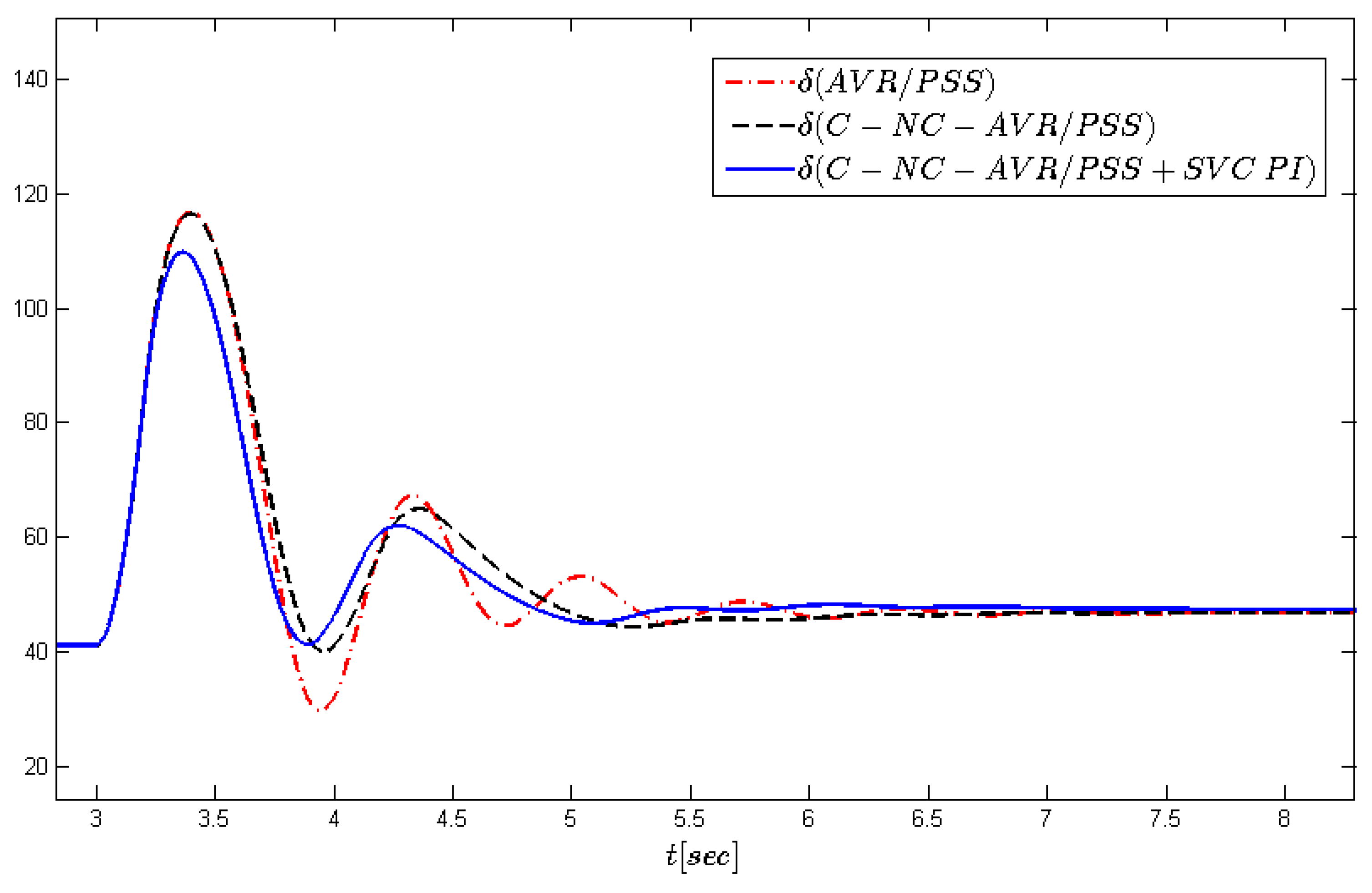
). Breakers open after 200 ms and the line remains open. Both the power angle response (
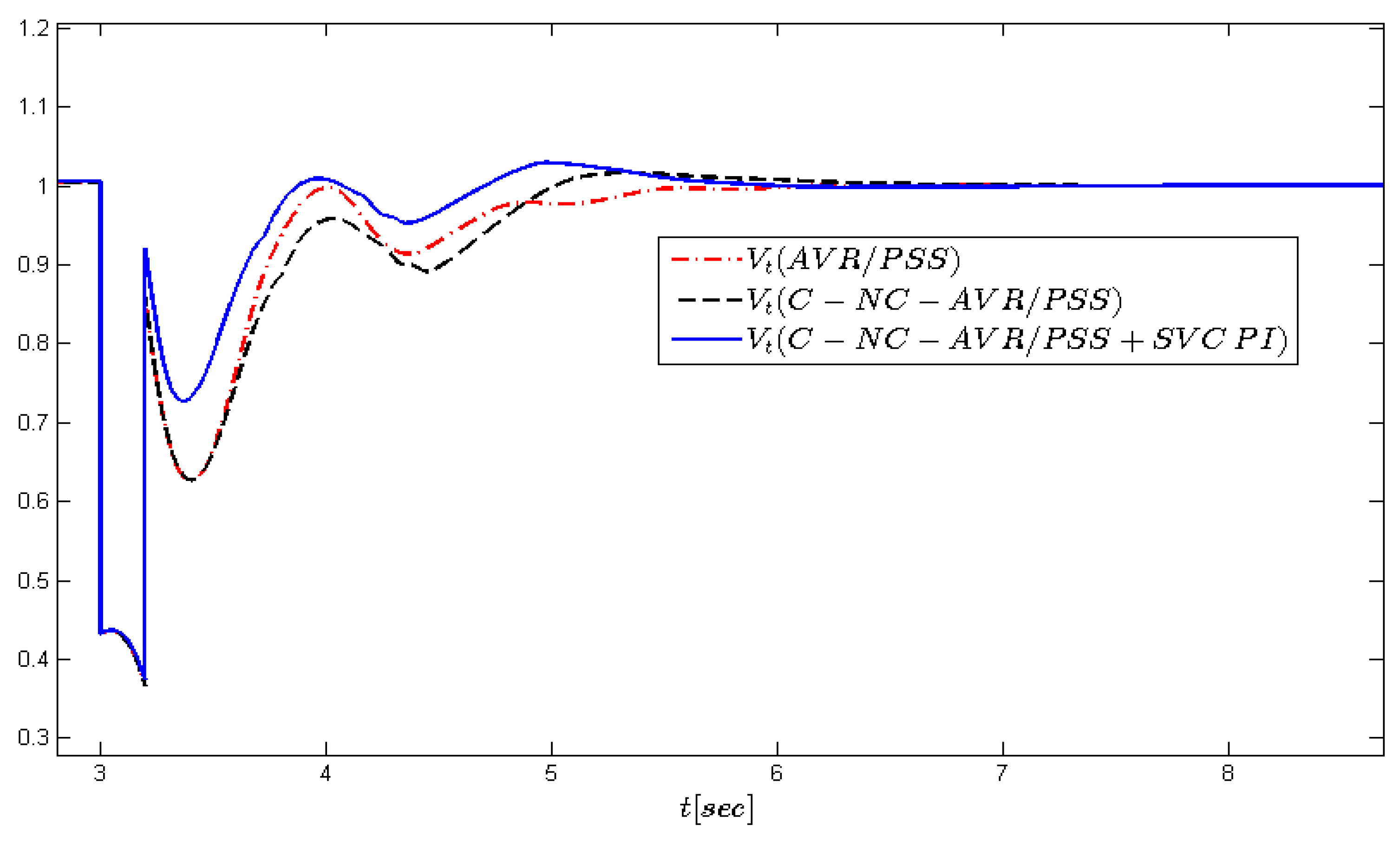
Figure 6) and the terminal voltage response (
Figure 7) demonstrate the effectiveness of the SVC compensator in improving the transient stability of the power system. Comparisons are made between three different cases. In particular, the proposed coordinated nonlinear stabilizer with the AVR/PSS and PI SVC controller (case 1: C-NC-AVR/PSS+SVC PI) is compared with the coordinated nonlinear stabilizer with the AVR/PSS controller (case 2: C-NC-AVR/PSS) and the simple AVR/PSS (case 3) controller.
Figure 6 shows that the power angle oscillations after the simulated large fault are significantly reduced by the action of the proposed coordinated nonlinear stabilizer of case 1. For the other two, it is seen that the case 2 controller provides a better response than that of case 3.
Figure 7 indicates the voltage response after the fault. The superiority of the proposed coordinated nonlinear stabilizer is apparent, while in all cases, the inclusion of the AVR/PSS controller effectively eliminates the steady-state deviation of the voltage amplitude.
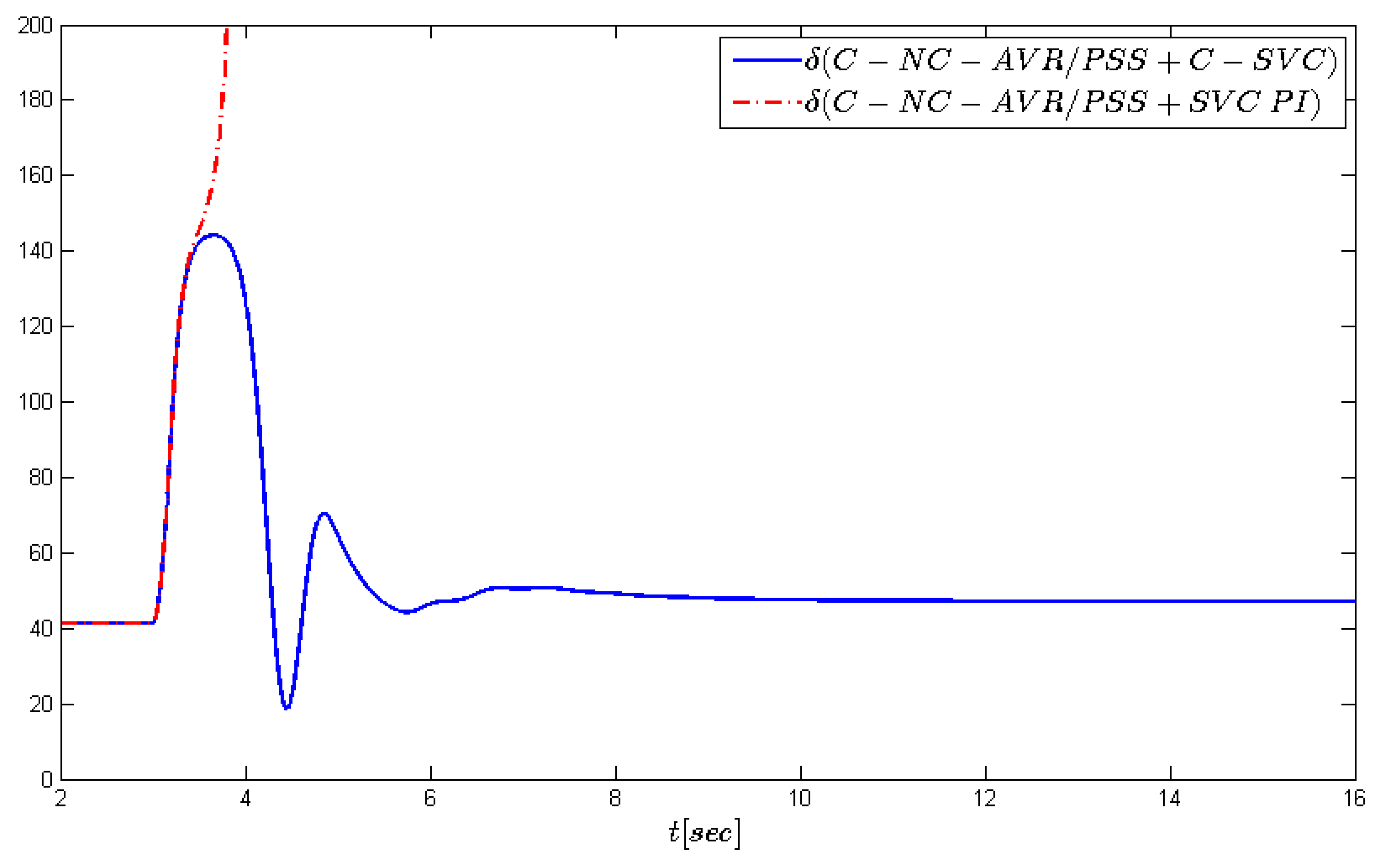
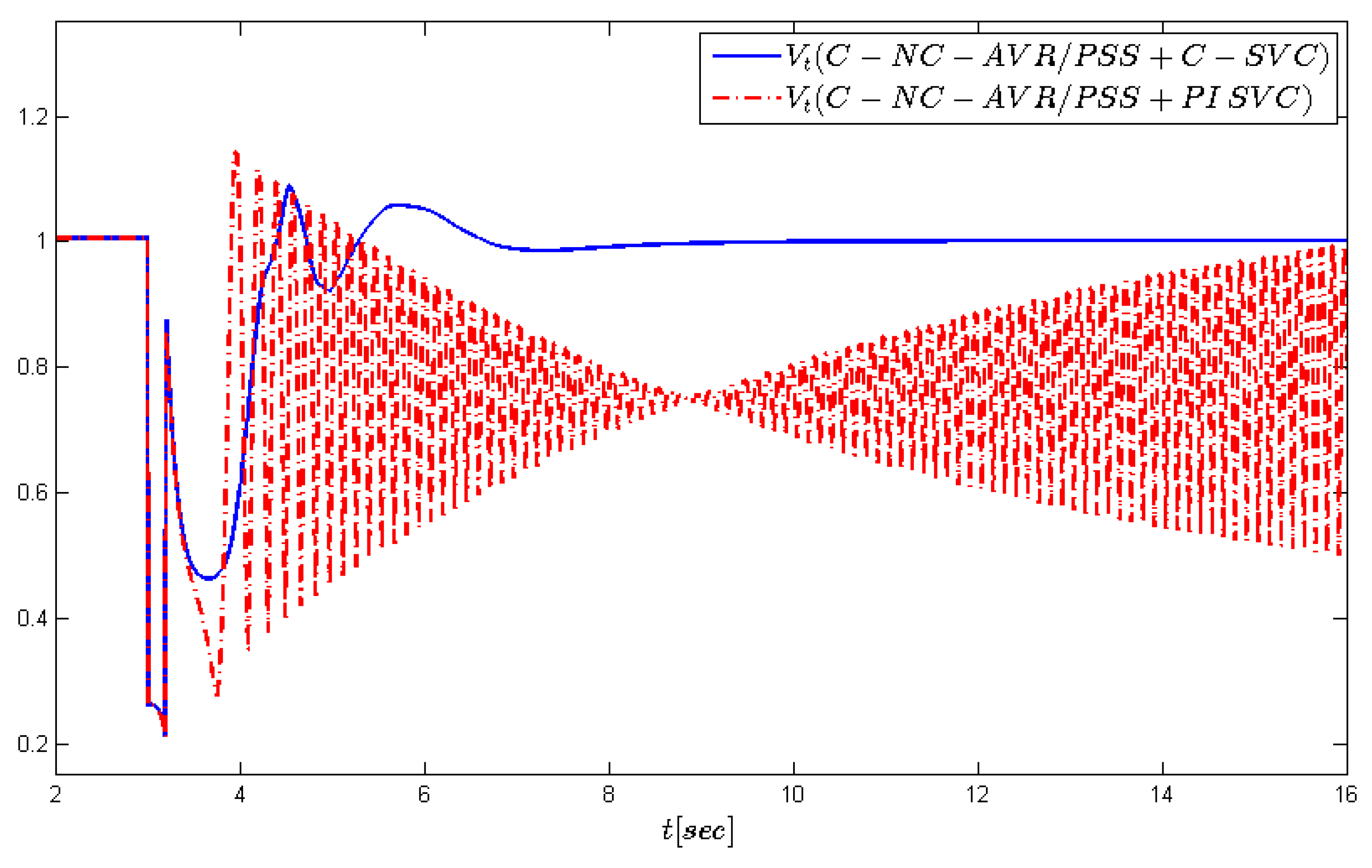
For the case of a more severe fault closer to the generator bus (), which is again removed after 200 ms, we compare the two control schemes: the coordinated nonlinear stabilizer with AVR/PSS and PI SVC controller (C-NC-AVR/PSS+SVC PI) and the coordinated nonlinear stabilizer with AVR/PSS and coordinated SVC control (C-NC-AVR/PSS+C-SVC).
Even though the PI SVC controller can help in reducing the undesired oscillations after a fault,
Figure 8 indicates that its action is not sufficient to avoid loss of synchronization for a fault that occurs so close to the generator. The C-NC-AVR/PSS+C-SVC controller on the other hand can efficiently return the system to the equilibrium point, avoiding loss of synchronism.
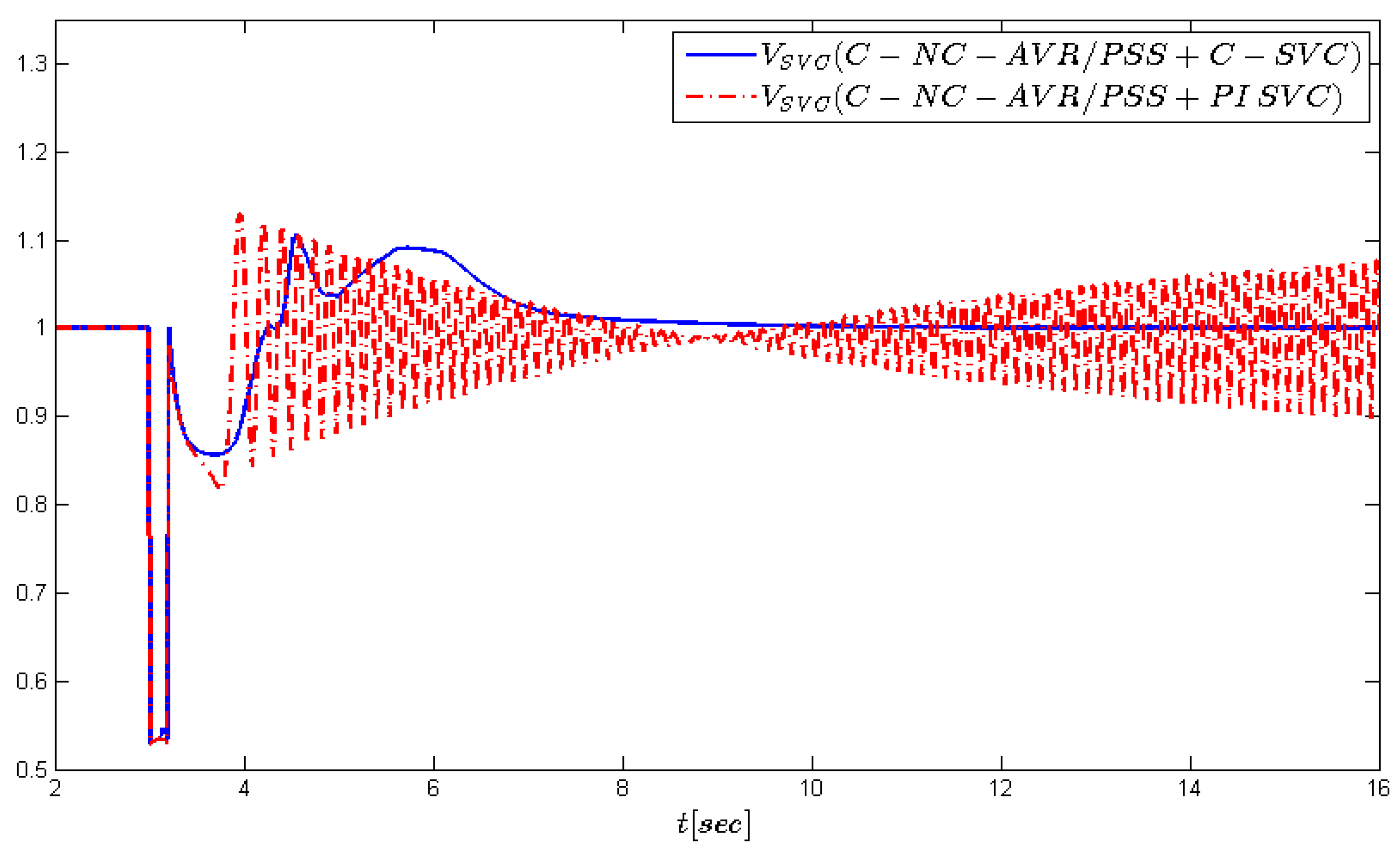
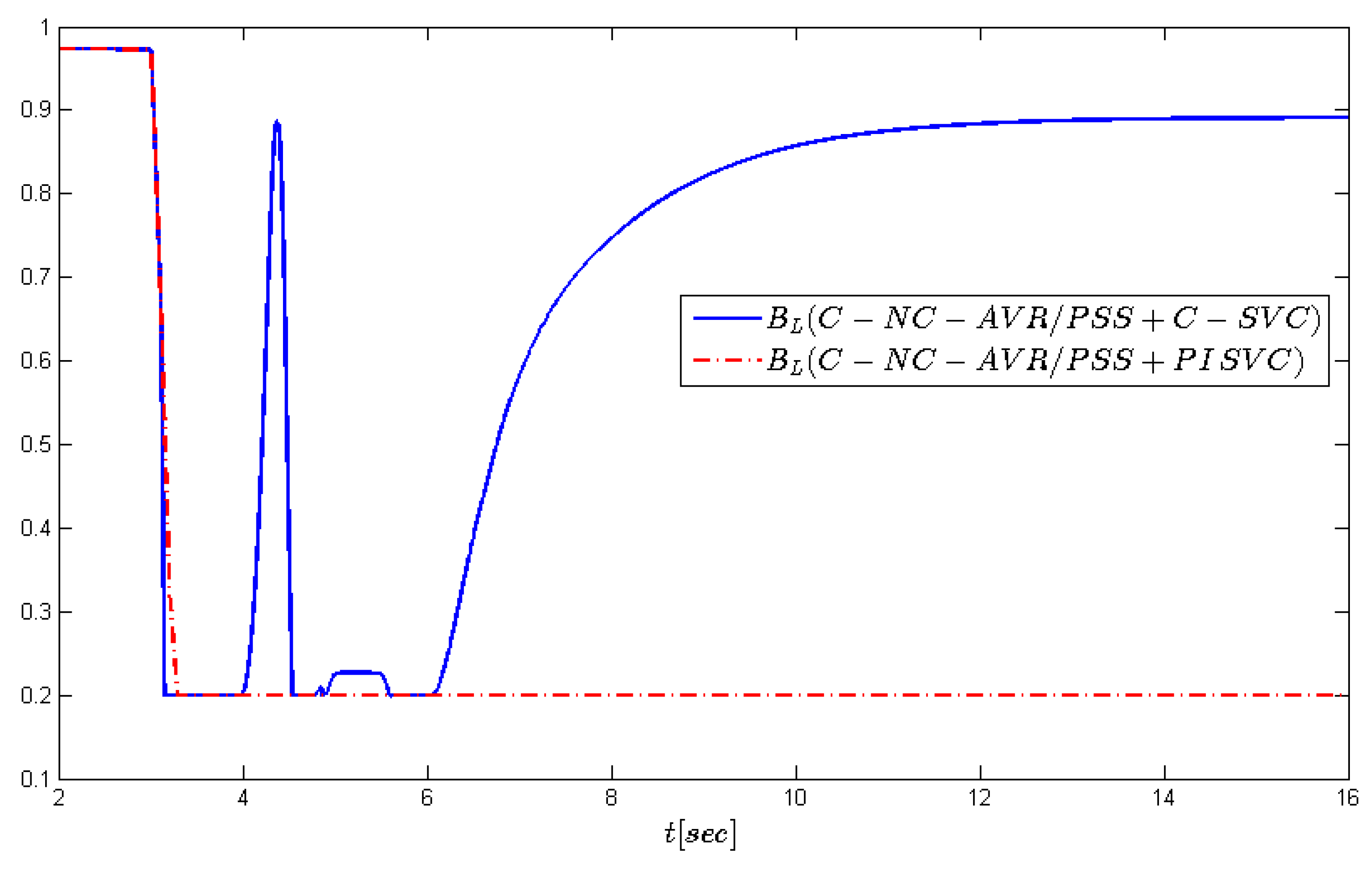
Figure 9,
Figure 10 and
Figure 11 show the generator terminal voltage response, the SVC bus voltage response, and the varying susceptance in the SVC compensator, respectively, under the proposed C-NC-AVR/PSS+C-SVC and C-NC-AVR/PSS+SVC PI controllers. Unstable oscillations for
occur under the C-NC-AVR/PSS+SVC PI controller, whereas the C-NC-AVR/PSS+C-SVC controller can effectively regulate voltages at the generator and SVC bus to their nominal values.
7. Conclusions
A new coordinated excitation and SVC control is proposed for regulating the output voltage and improving the transient stability of a synchronous generator infinite bus (SGIB) power system. By regulating the SVC susceptance using distant from the generator, and thus delayed, measurements, the SVC can potentially improve the overall transient performance and stability. The time delays that further complicate the rigorous analysis conducted are taken into account and impose the limits and conditions that are adequate for the proposed controller to be efficient and stable. The scheme is completed by a soft-switching mechanism used to recover the output voltage level at the terminal bus and the SVC bus after the large power angle deviations have been eliminated.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










