Analysis of Magnetic Field and Electromagnetic Performance of a New Hybrid Excitation Synchronous Motor with dual-V type Magnets

Abstract
1. Introduction
2. Machine Topology and Operating Principle
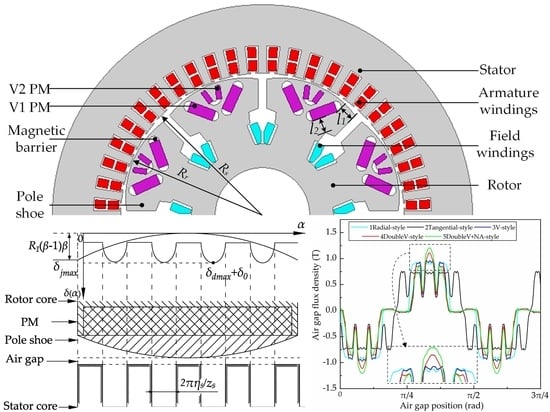
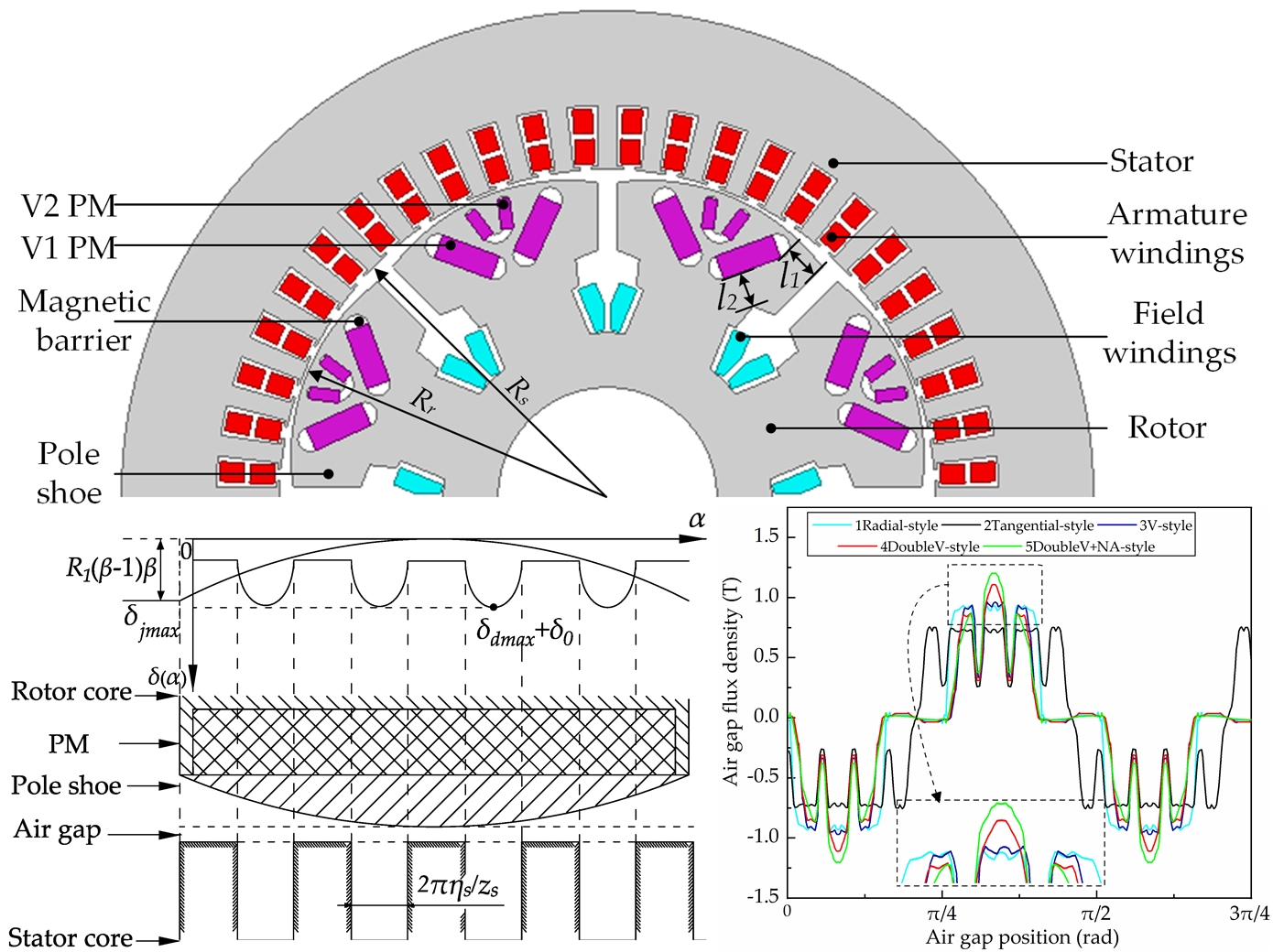
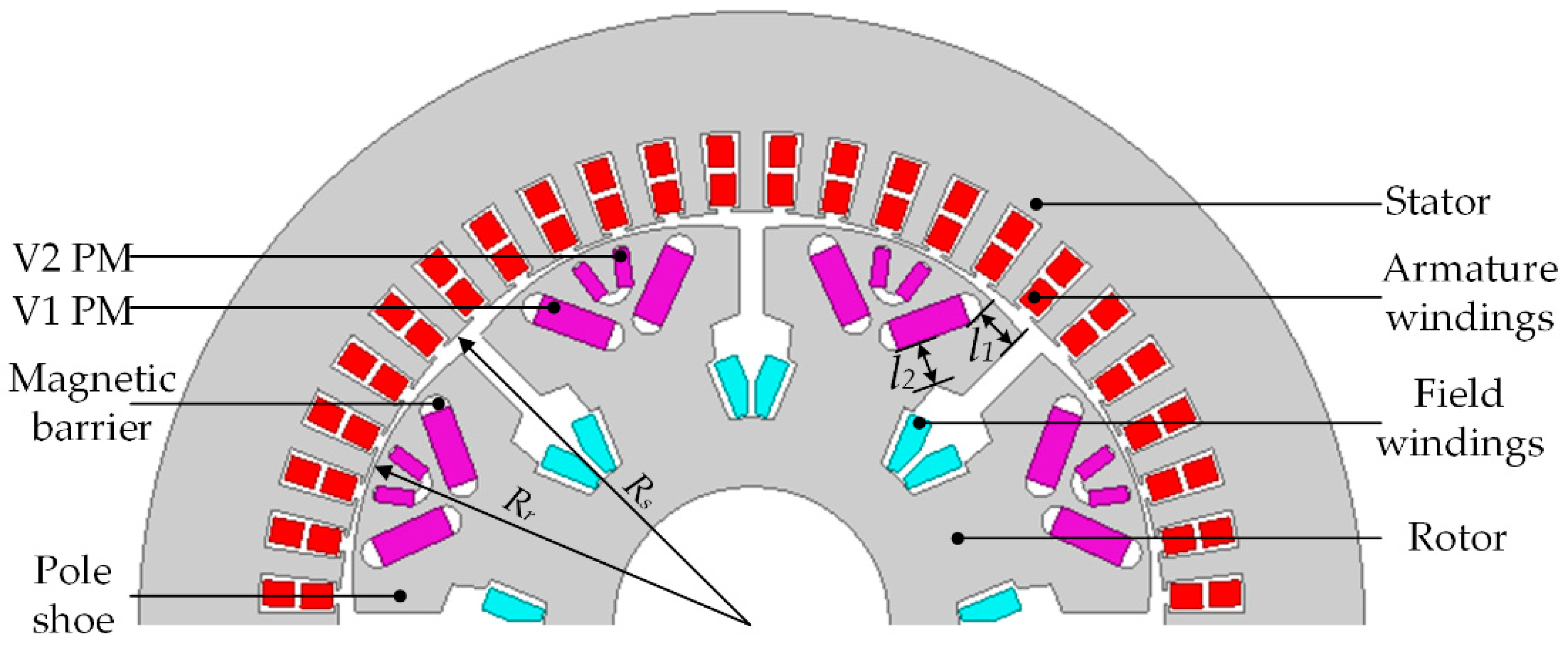
2.1. Topology Structure
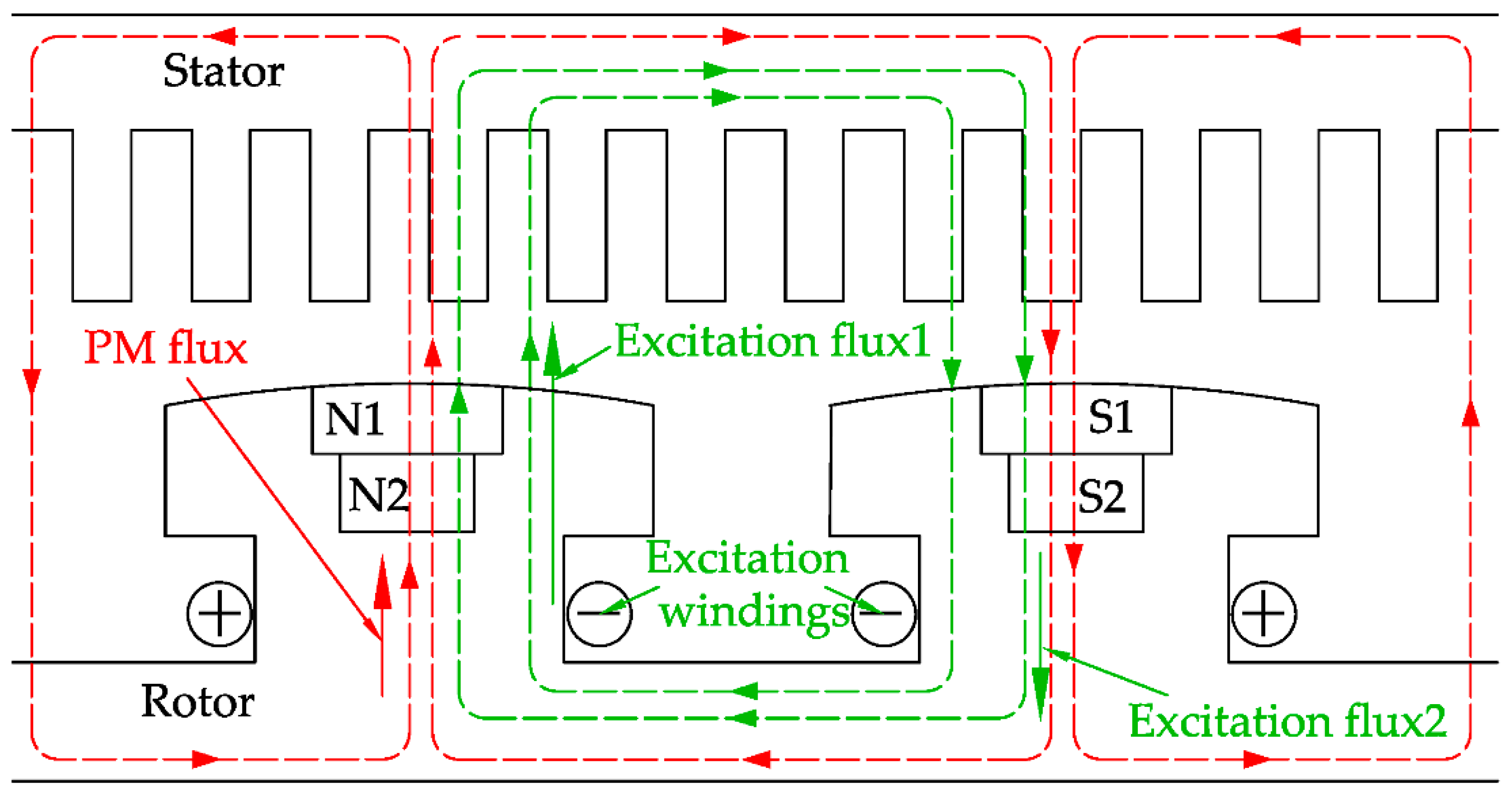
2.2. Characteristics of Magnetic Circuit and Operating Principle
3. Analytical Calculation of Magnetic Field
3.1. Descriptions of Model and Assumptions
3.2. The Formula of Air-Gap Flux Density
3.3. MMF Model of Rotor with Dual-Layer Combined PMs
3.4. Relative Permeance Function Using MEC Method
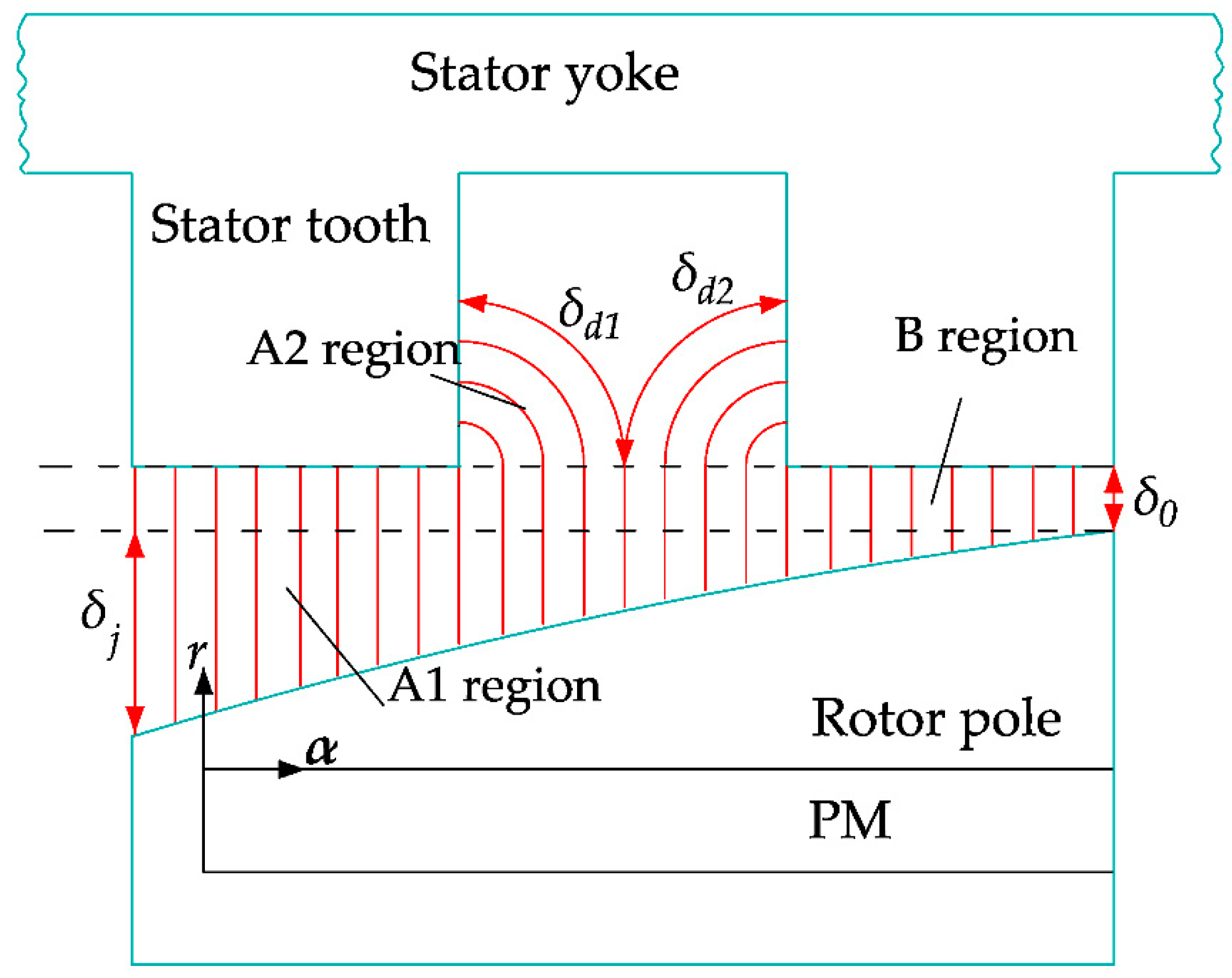
3.4.1. Equivalent Air Length Model in Magnetic Path
3.4.2. Fourier Series Expansions of Magnetic Path Permeance Function
4. Finite Element Analysis
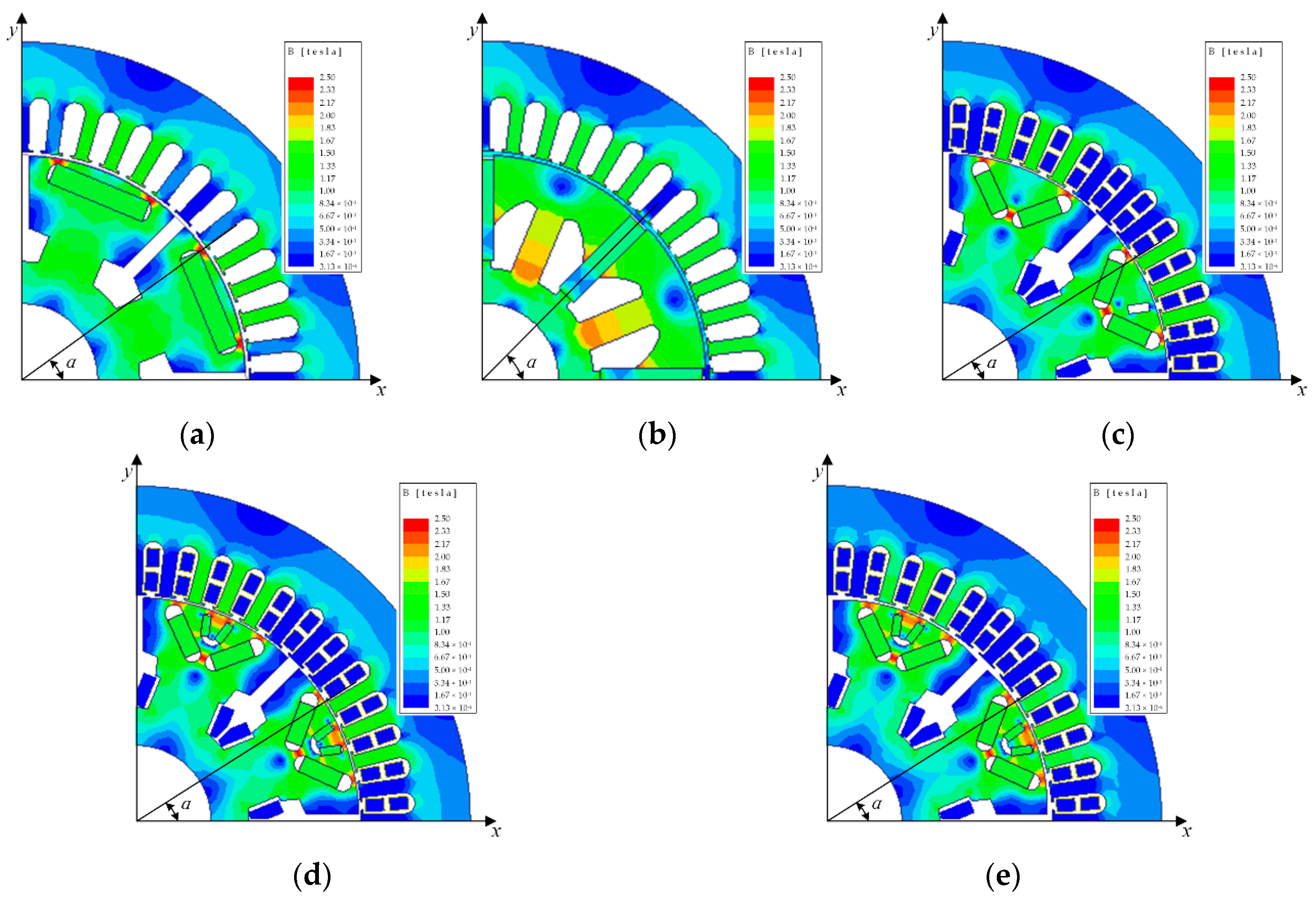
4.1. FEM Model of Five Motors with Different Rotor Structures
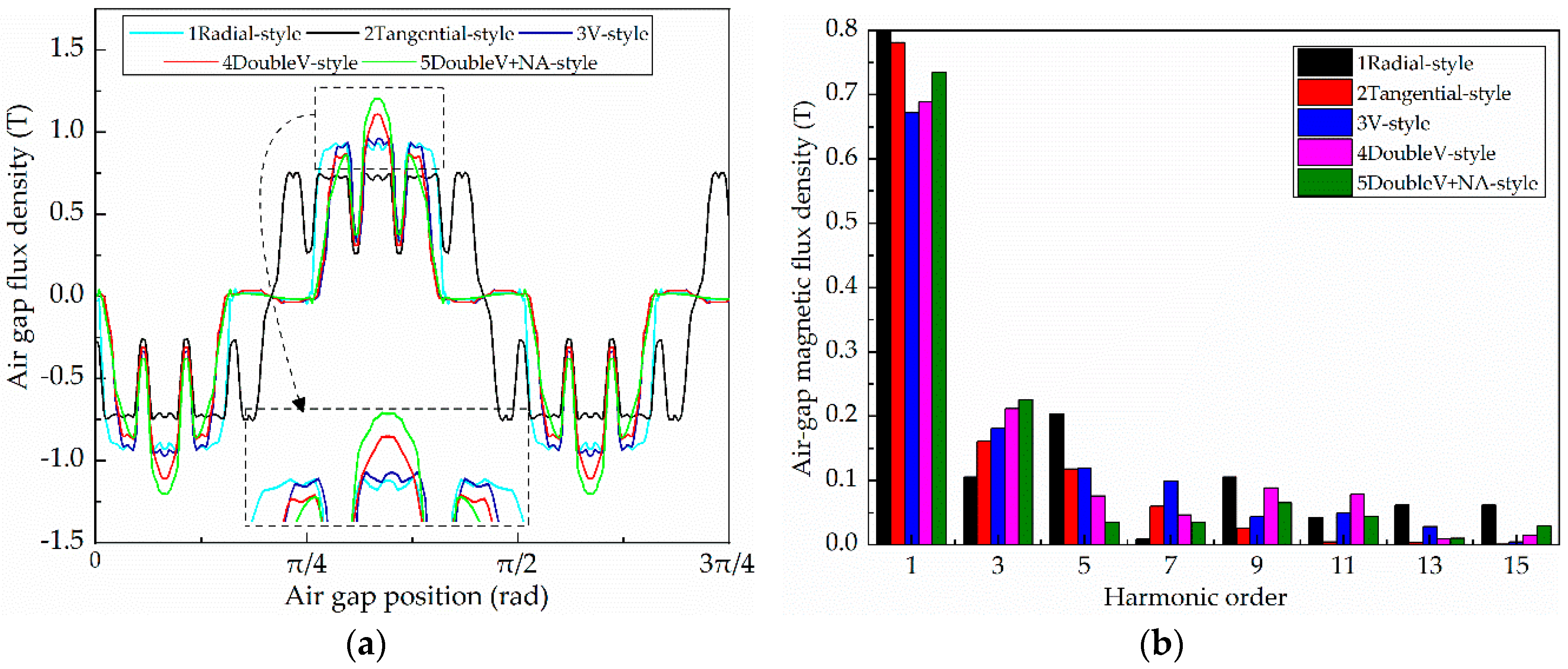
4.2. Comparisons of Air-Gap Flux Density
4.3. Verification of Analytical Method
4.4. Capacity of Magnetic Field Regulation
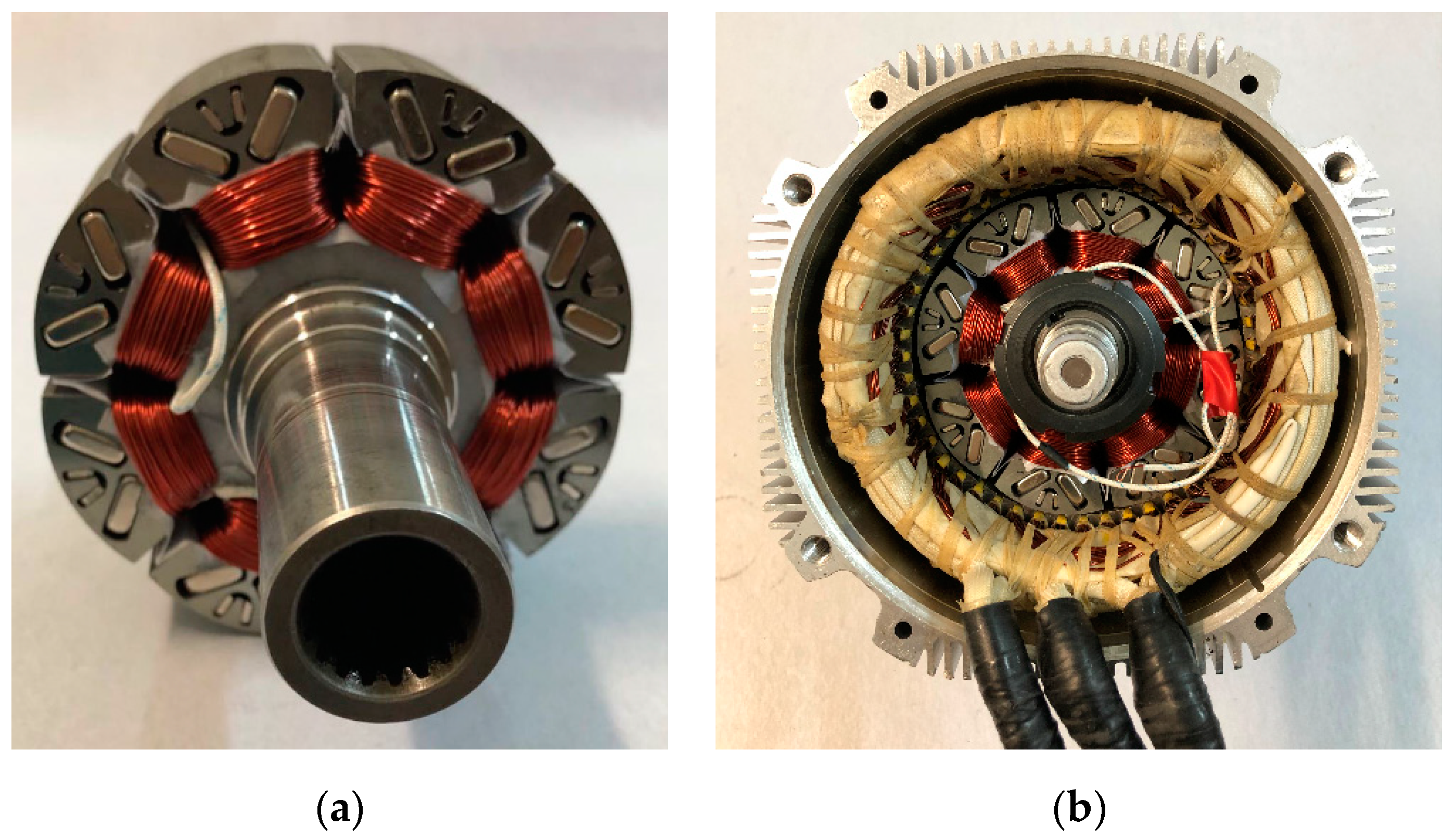
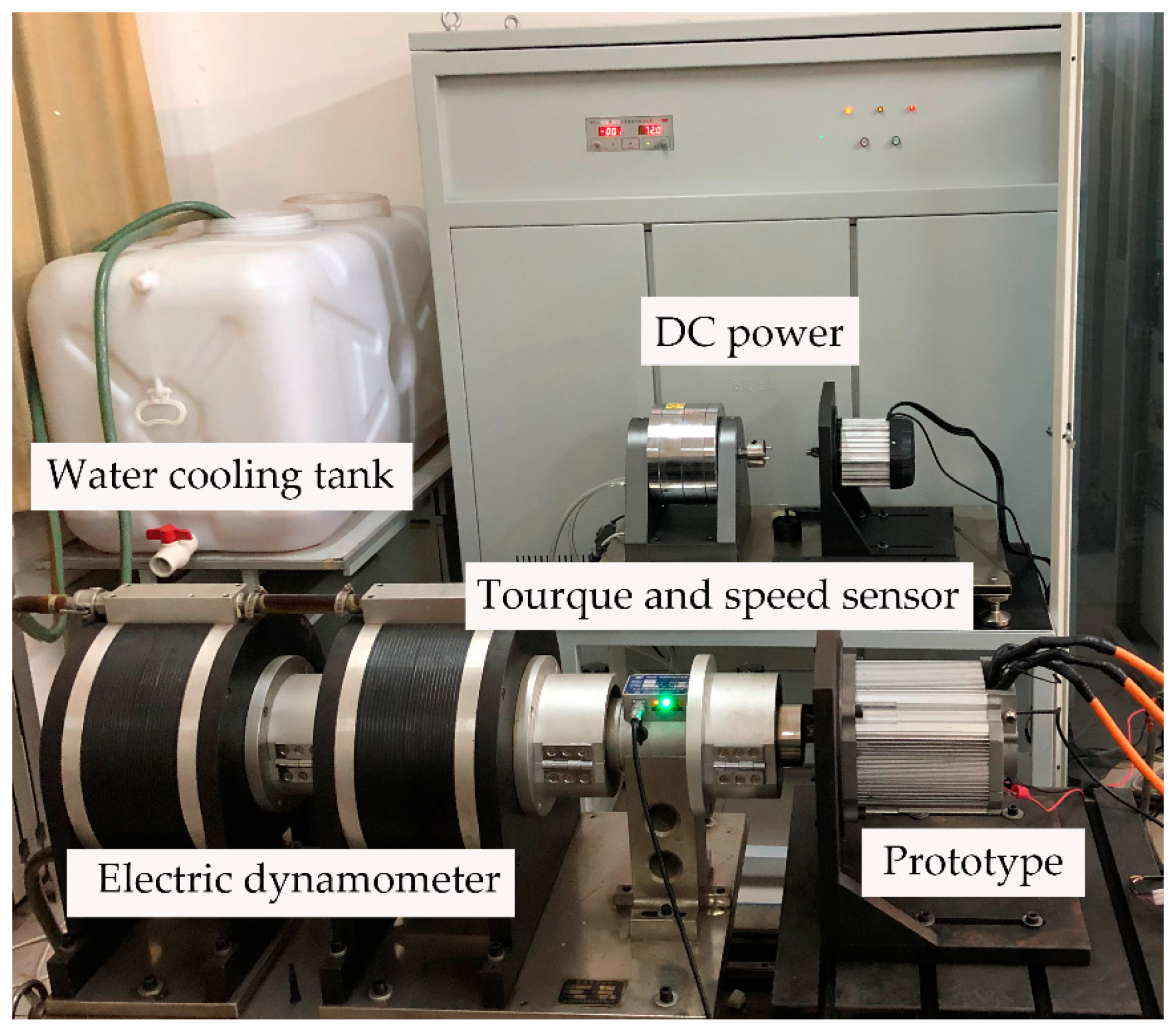
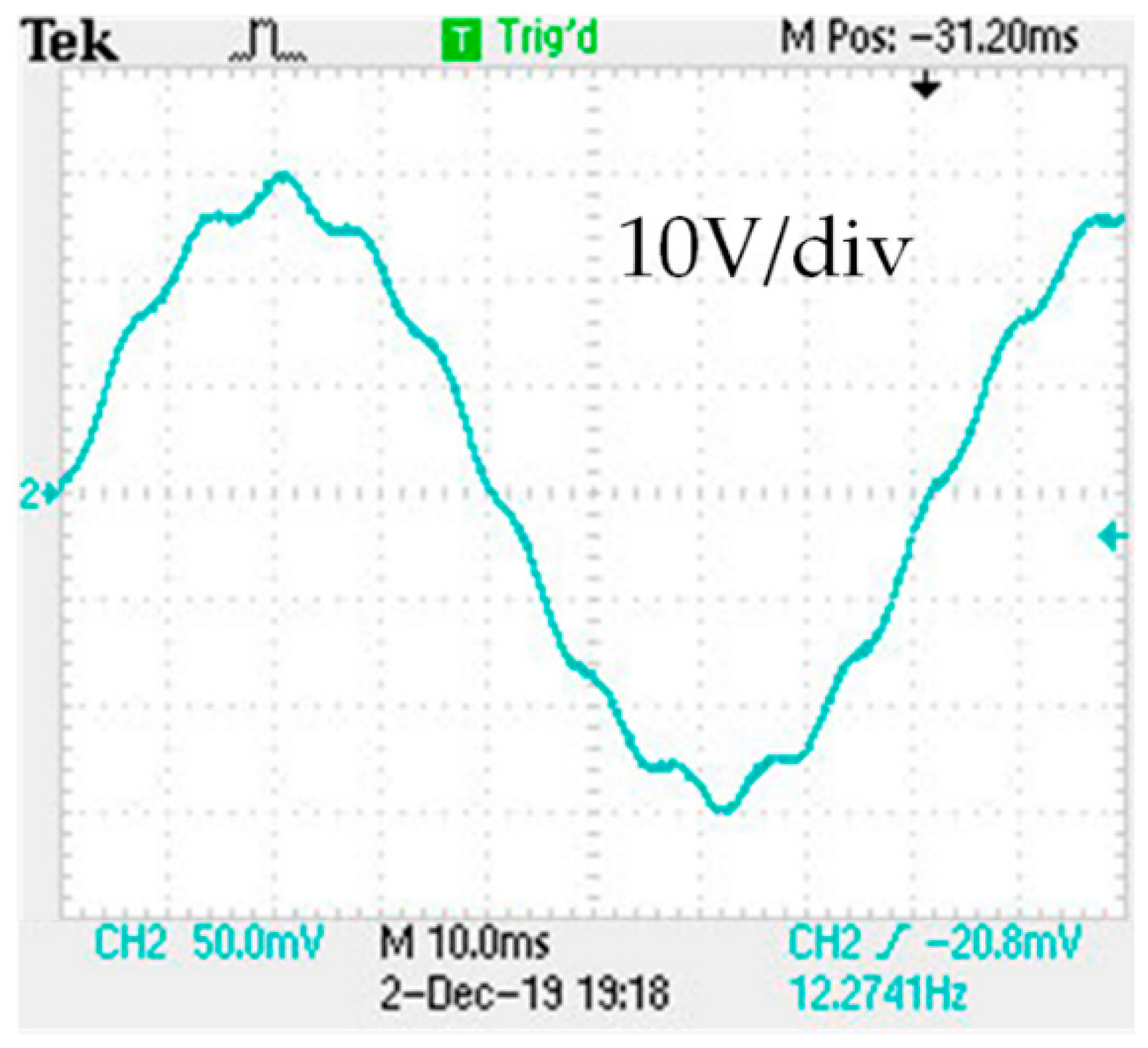
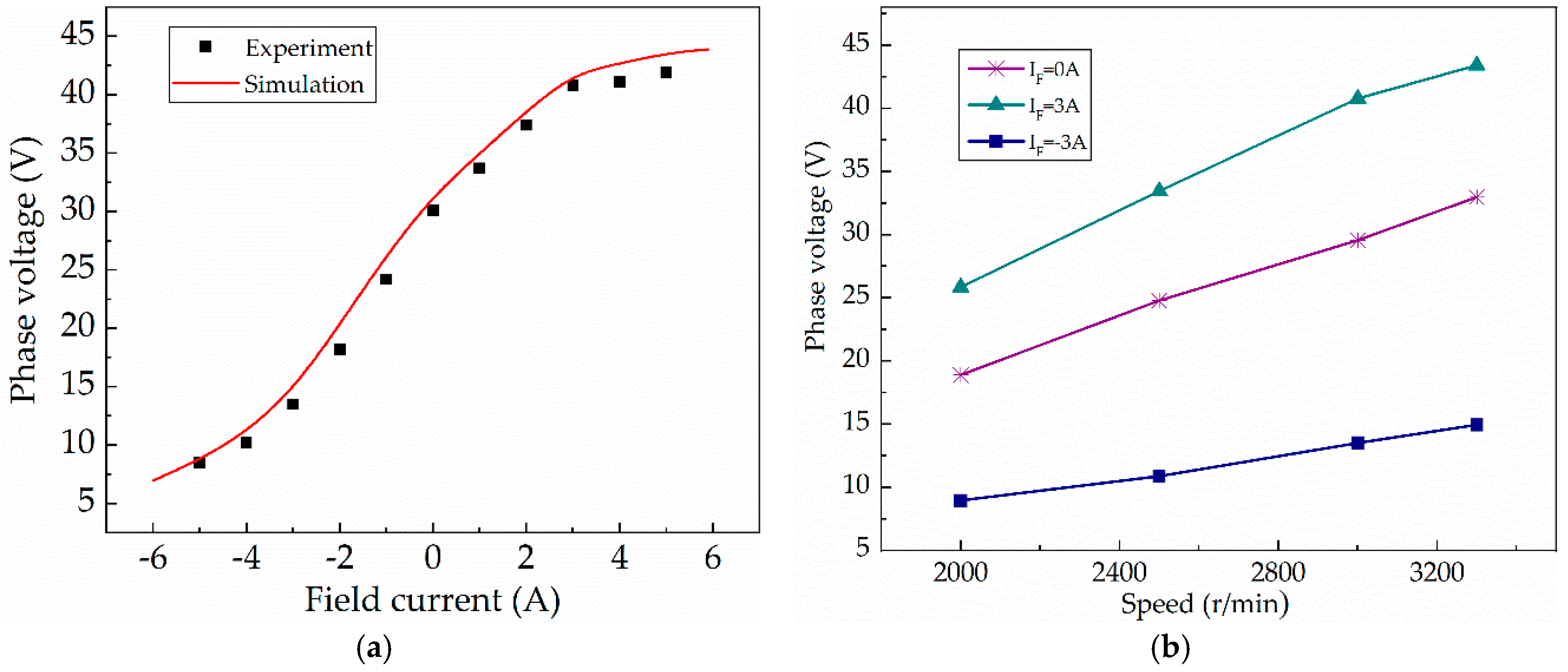
5. Experiments and Verification
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| NEV | New energy vehicles |
| HESM | Hybrid excitation synchronous motor |
| PM | Permanent magnet |
| MMF | Magnetomotive force |
| MEC | Magnetic equivalent circuit |
| Rs | Radius of the stator core |
| Rr | Radius of the rotor core |
| α | Angular position |
| r | Radius of the calculated air-gap |
| ψPM | Rotor MMF |
| Aair | Magnetic flux size at the radius of the calculated air-gap |
| θP | Pole arc of the calculation rotor |
| βθi | Pole arc of the calculation magnetic bridges |
| p | Number of pole pairs |
| θPi | Pole arc of the ith layer PMs |
| θki | Pole arc of magnetic bridges of the ith layer PMs |
| bmi | Equivalent radial thickness of ith layer PMs |
| hmi | Width of ith layer PMs |
| δdi | Air length of stator slot |
| δj | Air length of pole shoe |
| δ0 | Air length of air-gap |
| R1 | Radius of the rotor outside edge |
| R2 | Radius of the rotor inside edge |
| θpe | Pole arc of the proposed rotor |
| β | Salient pole ratio |
| μ0 | Permeability of the vacuum |
| μr | Relative permeability |
| ηs | Pole-arc coefficient of the stator |
| Zs | Number of stator slots |
| A0 | Flux size of air-gap |
| Aj | Flux size of the pole shoe |
| APM | Flux size of the PM |
| δPM | Equivalent air length of PM in the magnetic path |
References
- Lee, C.; Angle, M.; Bhalla, K.; Qasim, M.; Mei, J.; Mohammadi, S.; Iyer, K.; Sinkular, J.; Kirtley, J. Quantitative Comparison of Vernier Permanent-Magnet Motors with Interior Permanent-Magnet Motor for Hybrid Electric Vehicles. Energies 2018, 11, 2546. [Google Scholar] [CrossRef]
- Ma, F.; Yin, H.; Wei, L.; Wu, L.; Gu, C. Analytical calculation of armature reaction field of the interior permanent magnet motor. Energies 2018, 11, 2375. [Google Scholar] [CrossRef]
- Zhang, X.; Du, Q.; Ma, S.; Geng, H.; Hu, W.; Li, Z.; Liu, G. Permeance analysis and calculation of the double-radial rare-earth permanent magnet voltage-stabilizing generation device. IEEE Access 2018, 6, 23939–23947. [Google Scholar] [CrossRef]
- Kim, J.M.; Jang, J.Y.; Chung, J.; Hwang, Y.J. A New Outer-Rotor Hybrid-Excited Flux-Switching Machine Employing the HTS Homopolar Topology. Energies 2019, 12, 2654. [Google Scholar] [CrossRef]
- Zhang, X.; Du, Q.; Ma, S.; Hu, W.; Geng, H. Magnetic flux analysis and performance test of permanent magnet and claw-pole electromagnetic hybrid excitation generator for electric vehicle range extender. Intl. J. Elec. Hybri. Veh. 2017, 9, 187–205. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, X.; Niu, S. A Novel Dual-Structure Parallel Hybrid Excitation Machine for Electric Vehicle Propulsion. Energies 2019, 12, 338. [Google Scholar] [CrossRef]
- Du, Y.; Lu, W.; Wang, Q.; Zhu, X.; Quan, L. Comparative investigation of hybrid excitation flux switching machines. Energies 2018, 11, 1428. [Google Scholar] [CrossRef]
- Devornique, G.; Fontchastagner, J.; Netter, D.; Takorabet, N. Hybrid model: Permeance network and 3-D finite element for modeling claw-pole synchronous machines. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Zhao, X.; Niu, S.; Ching, T. Design and analysis of a new brushless electrically excited claw-pole generator for hybrid electric vehicle. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Rebhi, R.; Ibala, A.; Masmoudi, A. MEC-based sizing of a hybrid-excited claw pole alternator. IEEE Trans. Ind. Appl. 2014, 51, 211–223. [Google Scholar] [CrossRef]
- Wu, Y.; Sun, L.; Zhang, Z.; Miao, Z.; Liu, C. Analysis of Torque Characteristics of Parallel Hybrid Excitation Machine Drives with Sinusoidal and Rectangular Current Excitations. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Geng, W.; Zhang, Z.; Jiang, K.; Yan, Y. A new parallel hybrid excitation machine: Permanent-magnet/variable-reluctance machine with bidirectional field-regulating capability. IEEE Trans. Ind. Electron. 2014, 62, 1372–1381. [Google Scholar] [CrossRef]
- Wang, Y.; Deng, Z.; Wang, X. A parallel hybrid excitation flux-switching generator DC power system based on direct torque linear control. IEEE Trans. Energy Convers. 2012, 27, 308–317. [Google Scholar] [CrossRef]
- Zhang, Z.; Dai, J.; Dai, C.; Yan, Y. Design considerations of a hybrid excitation synchronous machine with magnetic shunt rotor. IEEE Trans. Magn. 2013, 49, 5566–5573. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, Z.; Zhang, X. Design and optimization of hybrid excitation synchronous machines with magnetic shunting rotor for electric vehicle traction applications. IEEE Trans. Ind. Appl. 2017, 53, 5252–5261. [Google Scholar] [CrossRef]
- Kamiev, K.; Nerg, J.; Pyrhönen, J.; Zaboin, V.; Hrabovcová, V.; Rafajdus, P. Hybrid excitation synchronous generators for island operation. IET Electr. Power Appl. 2012, 6, 1–11. [Google Scholar] [CrossRef]
- Afinowi, I.; Zhu, Z.; Guan, Y.; Mipo, J.; Farah, P. Hybrid-excited doubly salient synchronous machine with permanent magnets between adjacent salient stator poles. IEEE Trans. Magn. 2015, 51, 1–9. [Google Scholar] [CrossRef]
- Gaussens, B.; Hoang, E.; Lécrivain, M.; Manfe, P.; Gabsi, M. A hybrid-excited flux-switching machine for high-speed DC-alternator applications. IEEE Trans. Ind. Electron. 2013, 61, 2976–2989. [Google Scholar] [CrossRef]
- Zhao, J.; Lin, M.; Fu, X.; Huang, Y.; Xu, D. An Overview and New Progress of Hybrid Excited Synchronous Machines and Control Technologies. Chin. Soc. Elec. Eng. 2014, 34, 5876–5887. [Google Scholar]
- Capponi, F.G.; Borocci, G.; De Donato, G.; Caricchi, F. Flux regulation strategies for hybrid excitation synchronous machines. IEEE Trans. Ind. Appl. 2015, 51, 3838–3847. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, Z.; Wang, C.; Gao, H. Optimization and Performance Improvement of a Hybrid Excitation Synchronous Machine with Modular Magnetic-Shunting Rotor. IEEE Trans. Ind. Electron. 2019, 67, 4381–4390. [Google Scholar] [CrossRef]
- Ayub, M.; Jawad, G.; Kwon, B.-I. Consequent-Pole Hybrid Excitation Brushless Wound Field Synchronous Machine with Fractional Slot Concentrated Winding. IEEE Trans. Magn. 2019, 55, 8203805. [Google Scholar] [CrossRef]
- Hussain, A.; Atiq, S.; Kwon, B.-I. Consequent-pole hybrid brushless wound-rotor synchronous machine. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar]
- Ning, Y.; Liu, C. Analysis and calculation of electromagnetic and temperature field in a hybrid excitation synchronous generator. Int. J. Appl. Electromagn. Mech. 2016, 50, 435–448. [Google Scholar] [CrossRef]
- Ning, Y.; Liu, C.; Zhu, S.; Tang, J. Design and finite element analysis of a hybrid excitation synchronous machine. Int. J. Appl. Electromagn. Mech. 2015, 48, 11–19. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, H.; Meng, G.; Zhou, S.; Cao, Q. Analytical Calculation of Magnetic Field and Cogging Torque in Surface-Mounted Permanent-Magnet Machines Accounting for Any Eccentric Rotor Shape. IEEE Trans. Ind. Electron. 2015, 62, 3438–3447. [Google Scholar] [CrossRef]
- Wu, L.J.; Zhu, Z.Q. Simplified Analytical Model and Investigation of Open-Circuit AC Winding Loss of Permanent-Magnet Machines. IEEE Trans. Ind. Electron. 2014, 61, 4990–4999. [Google Scholar] [CrossRef]
- Liu, Y.-X.; Li, L.-Y.; Gao, Q.-H.; Cao, J.-W.; Wang, R.-H.; Sun, Z.-Y. Analytical Model of Torque-Prediction for a Novel Hybrid Rotor Permanent Magnet Machines. IEEE Access 2019, 7, 109528–109538. [Google Scholar] [CrossRef]
- Dajaku, G.; Gerling, D. Stator slotting effect on the magnetic field distribution of salient pole synchronous permanent-magnet machines. IEEE Trans. Magn. 2010, 46, 3676–3683. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Unit | Value |
|---|---|---|
| Stator outer diameter | mm | 160 |
| Stator outer diameter | mm | 107 |
| Number of rotor pole | / | 8 |
| Number of stator slot | / | 48 |
| Air gap length | mm | 0.5 |
| Phase number | / | 3 |
| Rotor outer diameter | mm | 106 |
| Rate speed | r/min | 3000 |
| Rate torque | Nm | 16 |
| Rate power | Kw | 5 |
| If (A) | −4 | −3 | −2 | −1 | 0 | 1 | 2 | 3 | 4 |
| VFEM (V) | 11.13 | 14.72 | 20.03 | 26.25 | 31.35 | 34.96 | 38.60 | 41.79 | 43.14 |
| Vtest (V) | 10.2 | 13.5 | 18.4 | 24.2 | 30.1 | 33.7 | 37.4 | 40.8 | 41.1 |
| εr (%) | 8.36 | 8.29 | 8.14 | 7.81 | 3.99 | 3.6 | 3.11 | 2.37 | 4.7 |
| Ia (A) | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | |
|---|---|---|---|---|---|---|---|---|---|
| If (A) | |||||||||
| 0 | 1.12 | 2.18 | 3.37 | 4.35 | 5.34 | 6.53 | 7.78 | 8.69 | |
| 1 | 1.42 | 2.93 | 4.35 | 5.66 | 7.16 | 8.25 | 9.87 | 11.01 | |
| 2 | 1.58 | 3.27 | 4.77 | 6.54 | 7.92 | 9.48 | 11.25 | 12.51 | |
| −2 | 0.37 | 0.83 | 1.09 | 1.55 | 1.82 | 2.29 | 2.57 | 2.95 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, W.; Zhang, X.; Yin, H.; Geng, H.; Zhang, Y.; Shi, L. Analysis of Magnetic Field and Electromagnetic Performance of a New Hybrid Excitation Synchronous Motor with dual-V type Magnets. Energies 2020, 13, 1501. https://doi.org/10.3390/en13061501
Hu W, Zhang X, Yin H, Geng H, Zhang Y, Shi L. Analysis of Magnetic Field and Electromagnetic Performance of a New Hybrid Excitation Synchronous Motor with dual-V type Magnets. Energies. 2020; 13(6):1501. https://doi.org/10.3390/en13061501
Chicago/Turabian StyleHu, Wenjing, Xueyi Zhang, Hongbin Yin, Huihui Geng, Yufeng Zhang, and Liwei Shi. 2020. "Analysis of Magnetic Field and Electromagnetic Performance of a New Hybrid Excitation Synchronous Motor with dual-V type Magnets" Energies 13, no. 6: 1501. https://doi.org/10.3390/en13061501
APA StyleHu, W., Zhang, X., Yin, H., Geng, H., Zhang, Y., & Shi, L. (2020). Analysis of Magnetic Field and Electromagnetic Performance of a New Hybrid Excitation Synchronous Motor with dual-V type Magnets. Energies, 13(6), 1501. https://doi.org/10.3390/en13061501