2.2.1. Feasibility Judgement of the Travel Route
This section is to illustrate how vehicle attributes (driving range and initial fuel tank level) and CSs’ locations will influence the feasibility of a certain route. For a certain route, if vehicle is capable of completing the whole route without changing route to refuel the car, this route is deemed as a success in the progress of feasibility judgment.
The following is a detailed introduction to the feasibility judgment method.
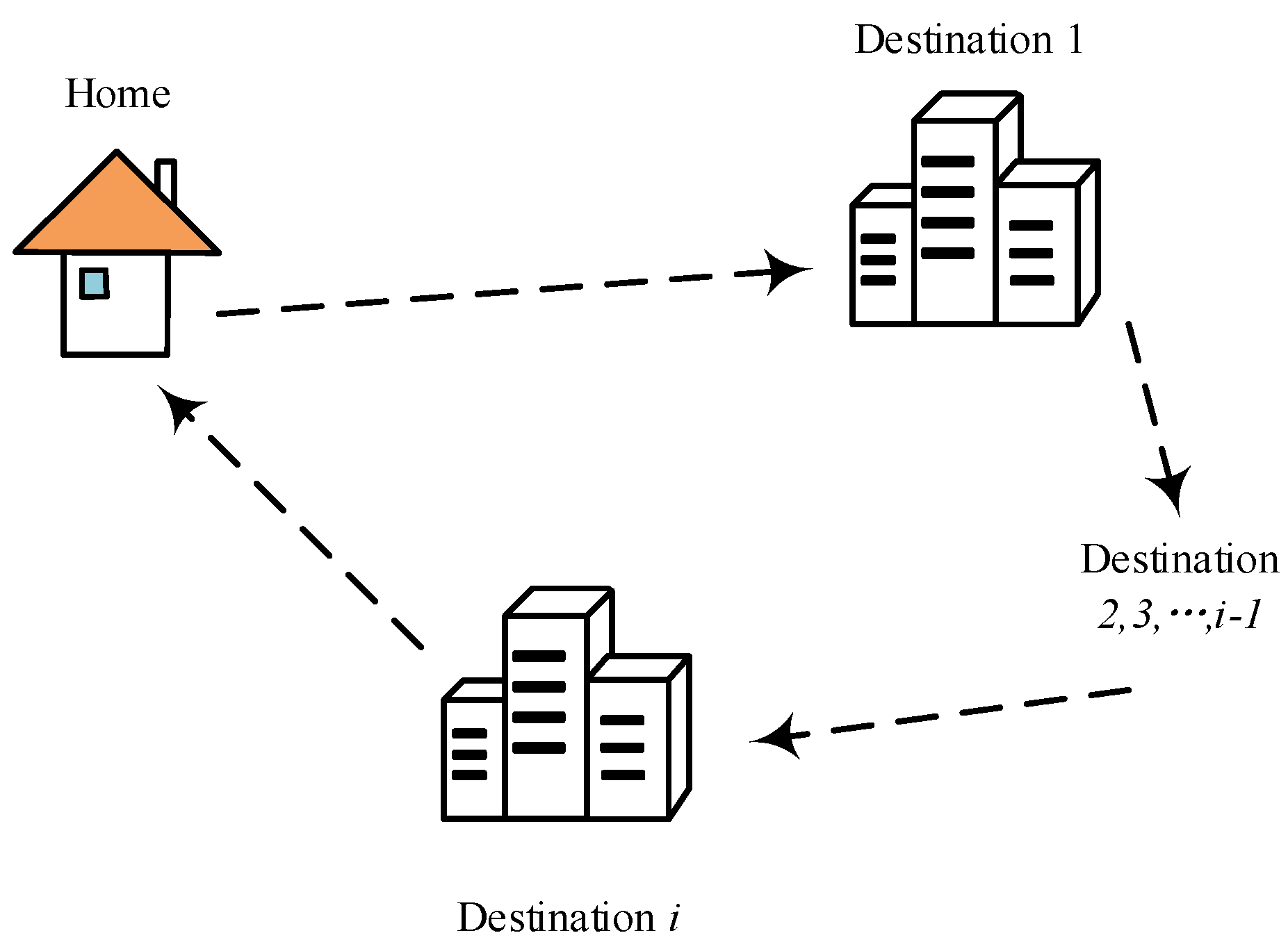
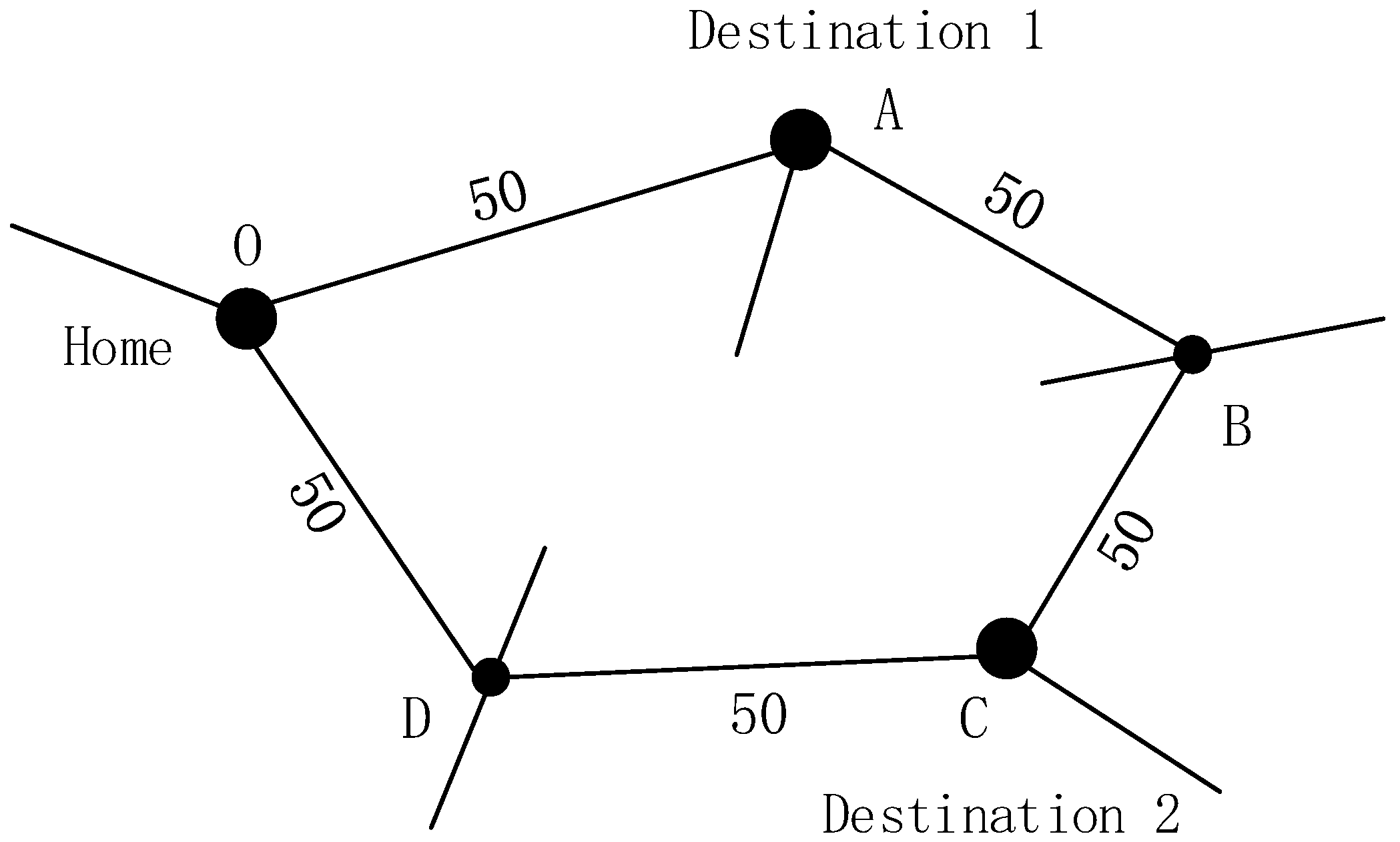
Figure 5 illustrates the spatial characteristics for one route with two destinations (A and C), one original home node (O) and two common road nodes (B and D). Each path between nodes is the shortest path generated by Dijkstra’s algorithm, the total length of the whole route A-B-C-D-A is 250 miles. We will use this example to describe all the possible conditions that the user may encounter and the criteria for the feasibility of the route, as below.
Before the travel, we suppose all drivers have already determined the quantities and location of destinations on the day before the trip and planed the route in advance with the help of smart navigation apps such as Google Maps, which can provide the refueling station information that users may use on their way.
Case 1: If initial fuel tank level is over 250 miles, for example , there is no doubt that the car can go through all the journeys without refueling.
Case 2: If initial fuel tank level is below 250 miles and there is no refueling station available on the route. The vehicle cannot finish this closed loop journey, and we deem that this route plan is not successful. Users will need change their route to complete the planned trip tomorrow. In our model, although a user may plan a new route, the new route is not considered when calculating the total success radio.
Case3: If initial fuel tank level is below 250, for example , and there are refueling stations on the route. The possible combinations of location for refueling station are {O}, {A}, {O,A}, {O,B}, {O,C}, {O,D}, {A,B}, {A,C}, {A,D}, {B,C}, {B,D}, {C,D}, {O,A,B}, {O,A,C}, {O,A,D},{O,B,C}, {O,B,D}, {O,C,D}, {A,B,C}, {A,B,D}, {A,C,D}, {B,C,D}, {O,A,B,C}, {O,A,B,D}, {O,B,C,D}, {A,B,C,D}, {O,A,B,C,D}, a total of 31 combinations. If we analyze each case one by one, the computational progress of calculation to determine whether it is successful is very complex and time-consuming. In fact, when the total path contains n nodes, the number of possibility combinations is . When the number of nodes increases, the number of combinations increases exponentially, and the amount of calculation increases sharply. So we need to find a new way to judge the possibility to avoid computational complexity.
In fact, when the set of locations of the refueling stations is known, there is a quick way to judge whether this refueling station location combination can support vehicle to go through all the journeys.
Figure 6 is a simplified schematic diagram of Case 3 where the destination node is omitted,
and
are the same node which refer to the home location.
The route is deemed a success if and only if:
when
,
when
,
where
refers to route
refers to refueling station
,
refers to the shortest path length between station
and
,
refers to initial fuel tank level for route
,
refers to the safety threshold for tank below which driver will look for refueling station immediately,
refers to drivers’ preference for refueling level at refueling station.
refers to the driving range for p type vehicle i. It is important to notice that if there are destinations between
and
,
is not the shortest path length generated by Dijkstra’s algorithm, it should consider the path to and from destinations. Suppose there is one destination
between
and
,
, we have:
where
represents the shortest path length via Dijkstra’s algorithm.
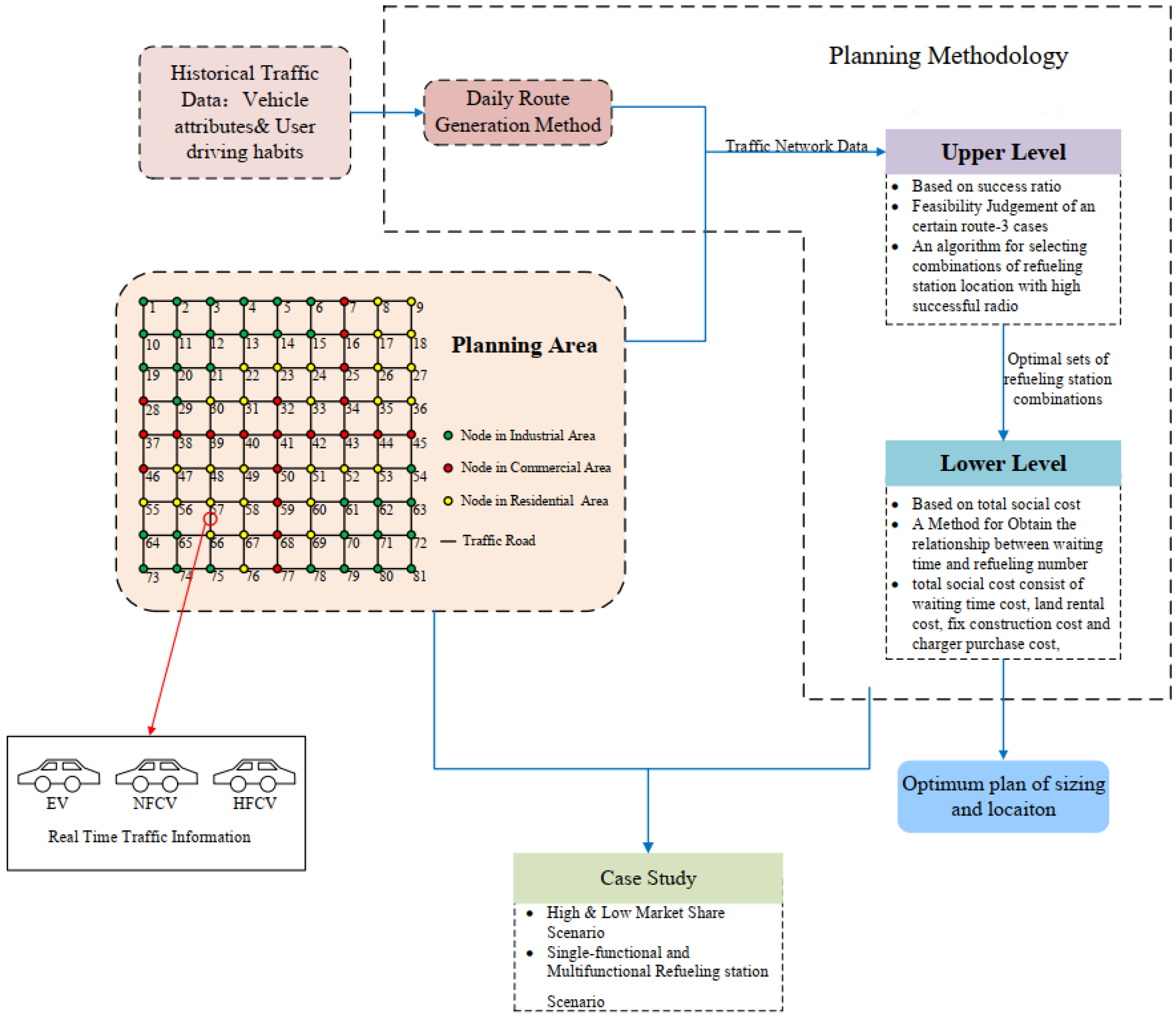
2.2.2. An Algorithm for Selecting Combinations of Refueling Station Location with High Success Ratio
The purpose of the upper model is to find a set of combination h of refueling station nodes which have a relatively high success ratio. With a great number of possible route plans generated by the method proposed in
Section 2.1.2, an algorithm is necessary to determine which case (or cases) matches each route and selects the optimal combination of refueling stations based on the value of success ratio. Before implementing the algorithm, there is an unrealistic scenario if the algorithm is only based on the objective of maximum success ratio. The scenario is that the number of refueling station would be very large (located in every possible location for CS) according to the objective of achieving the highest success ratio. However, a large number of planned refueling stations is not economically friendly and achievable. We eliminated the negative outcome by the assumption that the government will limit the total number of refueling stations to maximal
. The following steps are adopted to obtain the set of refueling station locations combinations with a relatively high success ratio.
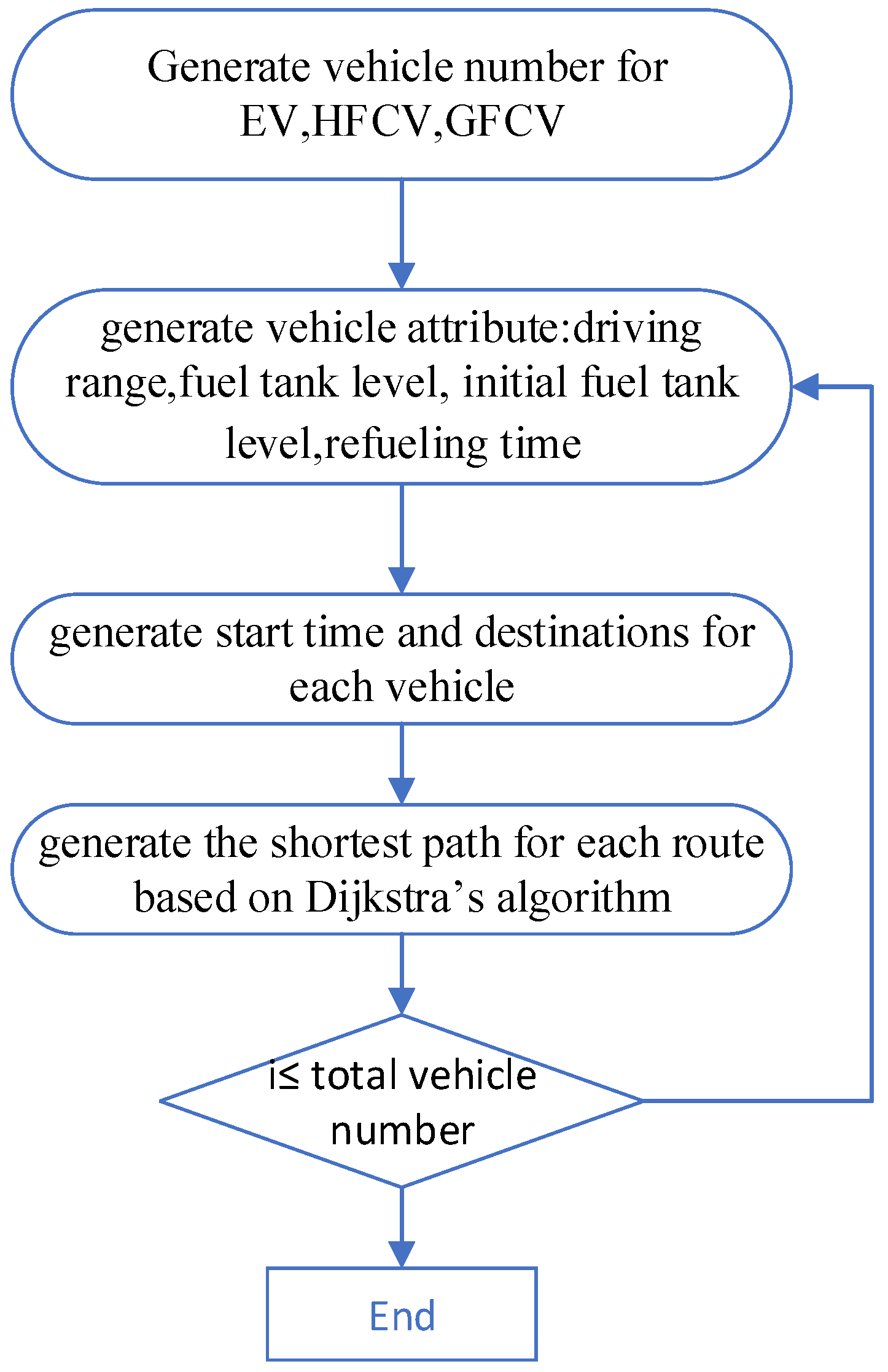
Step 1: Initialization based on a daily route generating method.
(1) Generate the daily route including number, location, type, and sequence of destinations, location of home, and shortest path for all cars, store the all the related nodes and links of paths.
(2) Establish and initialize an empty master list h, p, y and g.
Step 2: Beginning with the next route , implement feasibility analysis, if case 1 is not suitable for route i, then it is necessary to generate all the possible combination of refueling stations.
(1) If initial fuel tank level is over total route length, this route is deemed to a success, record and jump to next route , if not continue to the next step.
(2) Generate all the possible combinations of refueling stations, for example, for the route in
Figure 3, the possible combinations are {O}, {A}, {O,A}, {O,B}, {O,C}, {O,D}, {A,B}, {A,C}, {A,D}, {B,C}, {B,D}, {C,D}, {O,A,B}, {O,A,C}, {O,A,D},{O,B,C}, {O,B,D}, {O,C,D}, {A,B,C}, {A,B,D}, {A,C,D}, {B,C,D}, {O,A,B,C}, {O,A,B,D}, {O,B,C,D}, {A,B,C,D}, {O,A,B,C,D}. Analyze the feasibility of each combination, store all the success combination in the master list h.
(3) Remove combinations that are supersets of any other remaining combinations in master list h.
(4) Repeat steps 2.1–2.3 for all the route i.
Step 3: Put all refueling stations involved in master list h, and generating all the subsets of master list h with elements less than , index each subset sequentially beginning with 1 and record all the subsets in master list p.
(1) Beginning with the next subsets j, record the feasibility outcome for each route i ( = 1 if success, if fail).
(2) Calculate the success ratio according to Equation (7), record it in master list y, jump to step 3.1 until there is no subset left.
where n refers to the total number of cars.
(3) Rank the success ratio list, and select the subsets with top 10% scores, record the subsets which include the number and locations of refueling stations and the associated success ratio into master list g.
After the whole progress, a list of optimal combinations of refueling station locations and corresponding success ratio value are obtained.

 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}