The proposed DSR model is implemented in the Python 2.7 [
26] environment and solved using the MIP solver CPLEX 12.7 [
27] on a 3.4-GHz processor with 8 GB of random-access memory, and the optimality gap of CPLEX is set to 0%. Several case studies are presented to demonstrate the effectiveness of the proposed approach, as well as to show the advantages of considering DGs, ESSs, SSs, and TSs simultaneously in the DSR problem.
4.1. IEEE 33-Bus
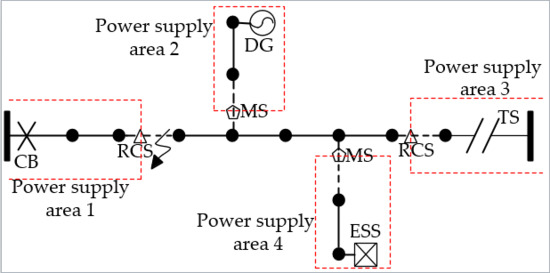
The proposed model is first applied to a modified IEEE 33-bus network with five RCSs, 11 MSs, two TSs, four DGs, and one ESS. The network is connected to two neighboring networks, one located on node 34 with a maximum reserve apparent power generation of 350 kVA; another is located on node 35 and the maximum reserve apparent power generation is 700 kVA. The locations of SSs and the parameters of DGs are shown in
Table 1 and
Table 2, respectively. The modified network is depicted in
Figure 3. The load parameters are given in [
28]. The unit interruption cost is considered to be
$0.60/kWh, and the operating cost of the switch is set equal to
$5 at a time. The depreciation costs of DG and ESS are assumed to be
$0.05/kW and
$0.10/kWh, respectively. The initial energy level and power rating of ESS are considered to be 1 MWh and 1 MVA, respectively. The restoration time associated with RCS and MS is assumed to be 2 min and 1 h, respectively. Additionally, the repair time is assumed to be 3 h.
Supposing a fault occurs in branch 5–6 in
Figure 3, to analyze the advantages of distribution network with DGs and ESSs, four cases are simulated as follows:
Case I: The network is not equipped with any DGs or ESSs;
Case II: The network is equipped with one ESS;
Case III: The network is equipped with four DGs;
Case IV: The network is equipped with four DGs and one ESS simultaneously.
The network reconfiguration results and related costs of Cases I–IV are provided in
Table 3.
According to the results shown in
Table 3, the interruption cost of Case I is
$2904.20, which is about 223% more than that of Case IV. It is clear that DGs and ESSs could enhance the service reliability. By comparing Cases I and II, the interruption cost of Case II falls to
$2026.70 because LPs 9–14 are restored by the ESS installed on node 13. In addition, LP 8 is still interrupted even though there is an MS on branch 7–8. Thus, the number of restorable customers is restricted due to the battery capacity of ESS being limited. In Case III, LPs 9–18 and 29–30 are energized through DG3, DG4, and the neighboring feeders. The interruption cost of the system falls from
$2904.20 to
$1213.50, a nearly 139% reduction. Hence, DGs make significant contributions to improving the system reliability in DSR. The interruption cost of Case IV falls to
$898.80, which is the lowest cost in the four cases. Additionally, the network in Case IV has formed four separate power supply areas by switching actions. It can be determined that LPs 2–5, 19–22, and 23–25 are restored through the main power; LPs 7–13 are restored through DG2 and the ESS; LPs 14–18 are restored through DG3 and the neighboring feeder on node 34; and LPs 29–33 are restored through DG4 and the neighboring feeder on node 35. DGs and ESSs are available resources near loads, and can restore power to the affected customers when faults occur, thereby reducing the number of affected customers and improving the service reliability.
Types and locations of SSs: The types and locations of SSs play an important role in the customer interruption time. With this in mind, in Case V, the RCS on branch 28–29 is replaced with an MS. In Case VI, the RCS on branch 28–29 is removed and an RCS is added to branch 29–30. In Case VII, the RCS on branch 28–29 is removed and an MS is added to branch 29–30. The network reconfiguration results and related costs of Cases V–VII are shown in
Table 4.
As shown in
Table 4, the interruption cost of Case V (
$1328.00) is more than that of Case IV (
$898.80). This is because MSs have a longer actuation time than RCSs, so the outage time of LPs 29–33 increases and the interruption cost of system increases. In addition, the interruption cost of Case VI is
$213.60 more than that of Case IV. This is because the RCS on branch 28–29 is removed; LP 29 cannot be restored via DG4 and would be interrupted until the fault is repaired. By comparison with Case IV–VII, the interruption cost of Case VII is
$1472.00, which is the highest cost in Case IV–VII. It seems that the reliability of system can be improved by equipping important loads with more SSs. Based on the results, it can be concluded that the types and locations of SSs would affect the recovery area and performance of DGs in DSR.
Initial energy and power rating of ESS: It is clear that the initial energy and power rating of ESSs play an important role in the performance of ESSs in DSR. In this regard, the initial energy level of ESS on node 13 is changed to 0.5 MWh, and considered as Case VIII; in Case IX, the power rating of ESS on node 13 is changed to 0.4 MVA. The reconfiguration results and relevant costs of Cases VIII–IX are provided through
Table 5.
Table 5 shows that the network reconfiguration result of Case VIII is the same as that of Case IX, LPs 7–18 are restored through DG2, DG3, ESS, and the neighboring feeders on node 34. By a comparison of Case IV and Case VIII, it can be determined that the interruption time of LPs 14–18 in Case IV is the automatic switching time, while the interruption time of LPs 14–18 in Case VIII is the manual switching time, resulting in an increase in the outage cost. This means that ESSs would influence the performance of DGs because ESSs play a similar role to DGs in DSR. Thus, it makes sense to consider DGs and ESSs together in DSR to obtain a better solution.
Comparison with GA: In order to investigate the efficiency of the proposed DSR model, Case X is based on the preset conditions of Case IV but solved by the genetic algorithm. The crossover rate and mutation rate are determined to be 0.8 and 0.05, respectively. The population size and maximum generations are assumed to be 24 and 120, respectively. The reconfiguration result of Case X is shown in
Table 6. The related results between the proposed MIP method and GA are provided in
Table 7.
Figure 4 shows the variation of optimal individual fitness of Case X with the iteration number.
As shown in
Table 6 and
Figure 4, Case X eventually converges to the global optimal solution after a certain number of iterations. Although the reconfiguration results of Case IV and Case X are the same, the computation time of Case IV is significantly less than that of Case X. Compared with the genetic algorithm, the proposed DSR model is transformed into a MIP model by means of linearization technologies, which not only improves the computational efficiency but also guarantees the optimality of the solution. In addition, the operators’ experience and adopted parameters would influence the performance of GA [
29], resulting in difficulties with solving the problem.
4.2. PG&E69-Bus
A modified PG&E69-bus distribution grid is given to illustrate the effectiveness and efficiency of the proposed DSR model in large networks. The modified PG&E69-bus system is equipped with 12 RCSs, 16 MSs, two TSs, six DGs, and one ESS. The network is connected to two neighboring networks, one of them located on node 70 with a maximum reserve apparent power generation of 500 kVA; another one located on node 71 with a maximum reserve apparent power generation of 700 kVA. The modified PG&E69-bus test system is depicted in
Figure 5. The detailed load data can be found in [
30]. The locations of SSs and the parameters of DGs are shown in
Table 8 and
Table 9, respectively. The initial energy level and power rating of ESS on node 18 are considered to be 2 MWh and 1 MVA. If a fault occurs in branch 1–2, the two cases are simulated as follows:
The reconfiguration results achieved using the proposed model are provided in
Table 10. The relevant costs and execution time are given in
Table 11.
According to the results shown in
Table 10, the network in Case XII has formed three independent power supply areas. LPs 3–7, 28–29, 36–38, and 59–69 are restored through DG1, DG2, and DG6; LP 9–21 and 42–58 are restored through ESS, DG3, DG4, and the neighboring feeder on node 71; LP 22–27 are restored through the neighboring feeder on node 70. As expected, the interruption cost of Case XI is
$5661.00, which is 232% more than that of Case XII. It is obvious that DGs and ESSs can significantly reduce the customer outage costs in DSR. In addition, considering DGs, ESSs, SSs, and TSs simultaneously would create a large number of variables and constraints when the problem size becomes larger. In
Table 11, the run time of Case XII is 5.38 s, so the proposed approach for this large-scale distribution network is still efficient.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}