1. Introduction
Wind energy has tremendous potential for supplying electricity to the grid without high investments. However, the variability and the intermittency of wind increase the difficulties of power extraction control [
1]. Different wind turbine configurations have been investigated with the purpose of maximizing power extraction—synchronous or asynchronous generators as well as stall and pitch-controlled systems—with the aim of controlling variable rotor angular speed. Maximum power extraction could be obtained by varying the rotor angular velocity for variable wind conditions. Considering the relation between power and generator angular velocity for a wind turbine at different wind speed conditions, it could be stated that, as the wind speed changes, the generator angular velocity should adapt to these changes to get the maximum power extraction. This parameter regulation is usually performed by a proportional-integral-derivative (PID) controller. However, as the system dynamics are completely non-linear, the PID response should be adapted for every operating condition [
2]. The fuzzy logic controller could provide parameter variation according to different operating conditions; however, it does not assure optimization of the response [
3]. Different control methods have been used to solve this parameter uncertainty problem, such as digital robust control [
4], linear parameter varying control [
5], nonlinear proportional-integral (PI) control [
6], and nonlinear model predictive control [
7]. However, an adaptive controller could make a random guess of the uncertain plant parameters, allowing adjustment of the controller parameters based on the information estimated from the model. Hence, an adaptive controller is highly recommended for adjusting plant parameters on systems with extremely non-linear dynamics.
In [
8], an adaptive control algorithm was developed for estimation of the wind turbine plant parameters as the wind conditions fluctuate. Feedback linearization procedures utilize these parameters to suppress the non-linearity of the plant. The controller algorithm was tested in MATLAB Simulink; the simulation provided satisfying results on ensuring maximum energy extraction from the wind kinetic energy. In [
9], the use of a fuzzy adaptive controller was suggested to adjust the pitch angle of the rotor blades for wind turbine regulation in order to overlook the wind turbine non-linearity dynamics. The utilization of a self-learning controller from the type of the model reference adaptive controller (MRAC) to minimize the effects of non-linearity caused by wind turbulence perturbations was proposed. The self-tuning neuro-fuzzy logic attempts to generate an approximation of the inverse plant system model with parameters that are afterward used for triggering the desired control action to maintain the rotor speed under the required limits. Using the wind turbine induction generator pattern available on the Simulink 7.9 toolbox, the performance of a PI controller vs. the self-learning neuro-fuzzy controller was compared to adjust pitch angle for regulating the rotor angular velocity under variable wind speed conditions. The authors concluded that the self-tuning fuzzy controller performs satisfactorily under strong wind disturbances.
In [
10], an algorithm was designed for the adaptive control of a variable speed variable pitch wind turbine. An adaptive control algorithm using radial-basis-function neural networks was proposed for various operating modes of the variable-speed variable-pitch wind turbines. Three operation modes were considered which include torque control at low wind speeds, pitch control at higher wind speeds and a smooth transition between these two regimes. An adaptive neural network control approximates the nonlinear dynamics of the wind turbine based on input/output measurements and ensures smooth tracking of the optimal tip speed ratio at various wind speeds. The neural network weights are obtained using the Lyapunov stability analysis. Finally, the control algorithm is validated using simulation studies on a 5 MW wind turbine. In [
11], a fuzzy adaptive PID control for the pitch system in variable speed variable pitch wind turbines was proposed. A mathematical model for the pitch control system was developed, and a fuzzy adaptive PID controller for the pitch system with disturbances and uncertainty was proposed. The model takes into account the dynamics of the pitch actuator model and the drive train model. The proportional, the integral, and the derivative constants were auto-tuned using a fuzzy controller for optimum response. Numerical simulations carried out in Simulink were used to prove that the proposed method can achieve better control performances than conventional pitch control strategies. Responses for PID, fuzzy, and fuzzy adaptive PID were compared and revealed that, even though the PID controller has lower delay time and rise time, it has oscillations with a peak overshoot, which results in damage to the system. However, the results show that the use of fuzzy adaptive PID controller suppresses the steady state error and gives minimum delay time, rising time, settling time, and stability.
In [
12], an adaptive control program was developed to manage wind turbine pitch angle with the aim of minimizing extreme loads and fatigue on the blades under high wind speeds or turbulence operation conditions while maximizing the power production of the turbine. The model was tested considering the 5 MW offshore wind turbine guidelines of the National Renewable Energy Laboratory (NREL). Control operation was contrasted with a gain-scheduled proportional-integral (GSPI) controller and a disturbance accommodating controller (DAC). It was shown that load minimization of the proposed adaptive controller is comparable with the DAC performance and much better than GSPI response to stress control. Considering the rotor speed adjustment, the adaptive controller provides better results than the DAC. The authors showed that the proposed adaptive controller performs effectively for controlling load propagation on the wind turbine blades while optimizing power production by maximizing rotor angular speed.
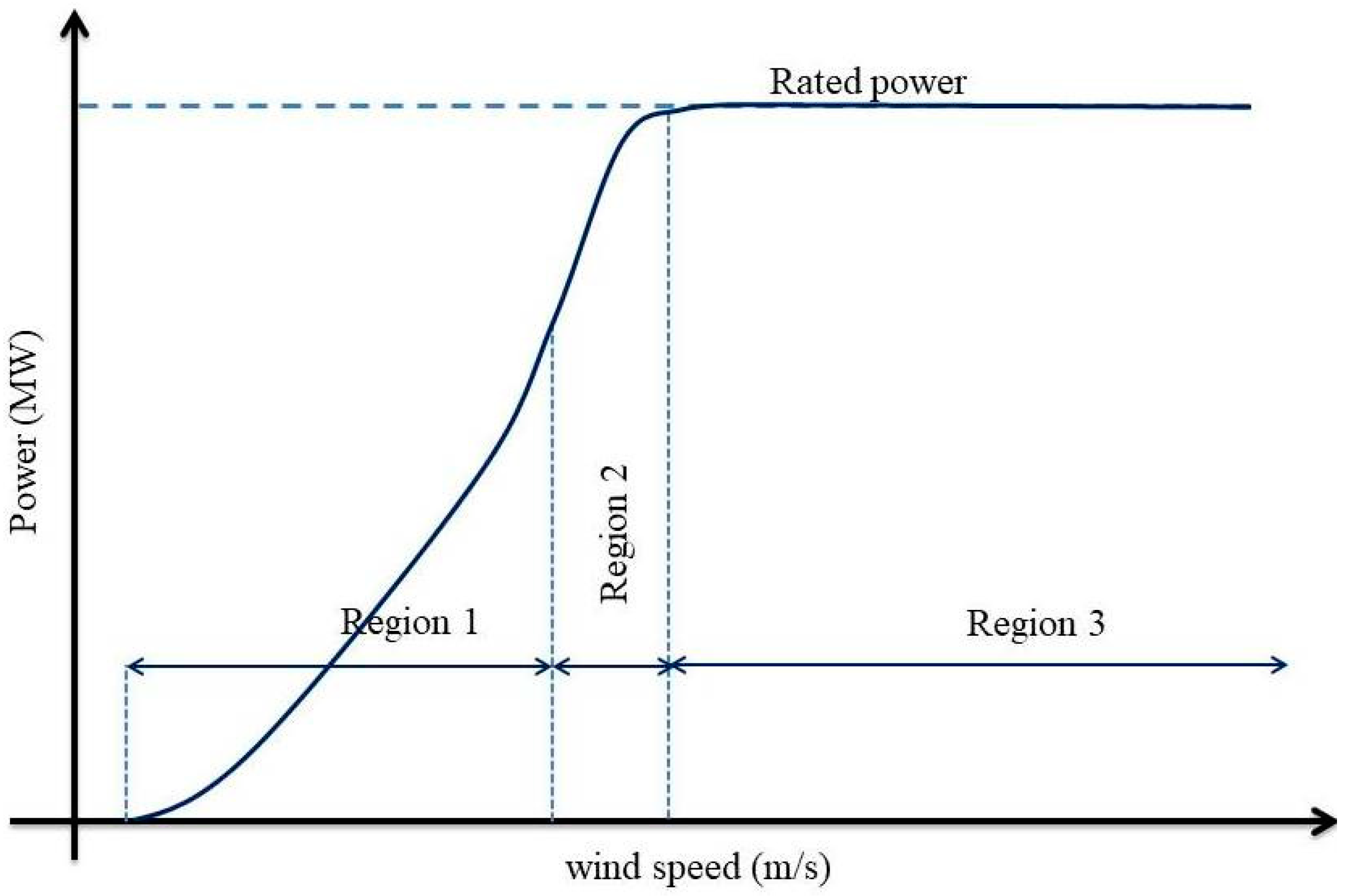
The main objective of this paper is to design a robust adaptive controller to maximize the power extraction from a wind turbine at various operating regions shown in
Figure 1. For this purpose, torque control technique is proposed for wind speeds in region one (low wind speeds of range 4−8 m/s) and region two (transition region with medium wind speeds of range 8−11 m/s), and pitch control approach is proposed for wind speeds in region three (high wind speeds of range 11–20 m/s). In all regions, the rotor angular velocity is controlled to maintain the optimum rotor angular speed of the wind turbine. The switching between the regions is enabled based on the wind speed [
13].
The next section describes the mathematical modeling of wind turbine dynamics. The third section discusses the methodology used for the design of the adaptive control algorithm for managing wind turbine performance. In the fourth and the fifth sections, the simulations are carried out in Simulink, and results of applying the proposed adaptive control algorithm are presented. The sixth section presents a case study to validate the proposed adaptive control algorithm using real wind speed data. The last section summarizes the results and states the implications and the directions for future research.
2. Wind Turbine Mathematical Modeling
The following mathematical model of the wind turbine system dynamics is based on the work described in [
14].
Table 1 shows the main parameters of the system under consideration. The model development is done by describing the equations of motion and the transfer function of the wind turbine dynamic system.
2.1. Equations of Motion
The equations of motion that govern the wind turbine (WT) dynamics under the effect of wind forces as a function of time are presented in this section. The differential equations that describe the system are expressed in the matrix form. The governing differential equation that describes the whole system could be written as:
where
is the vector with the independent variables of the system,
is the input,
is the time,
is the generalized force,
is the matrix of inertia,
is the dissipation matrix and
is the stiffness matrix.
The equations of motion could be expressed as the Euler–Lagrange equation form using the energy-based approach. For this study, the term
represents the kinetic energy of the system,
the potential energy,
is used for the dissipation function of non-conservative forces, while
is the conservative generalized forces.
is the Lagrangian function and is defined as
. Considering this mathematical notation, the Euler–Lagrangian equation could be expressed as:
2.2. Dynamics of a Doubly Fed Induction Generator Wind Turbine
This model considers a five degree of freedom (rotor angle (), gearbox angle (), generator angle (), blade angular displacement (), and the nacelle axial displacement ())system along with the masses of all the main elements of a wind turbine (tower, blades, rotor, gearbox, and generator). The mechanical model considers moment of inertia of the rotor (), low-speed gearbox shaft (), and generator (). The low-speed part of the gearbox has a torsional absorption coefficient of , and the stiffness of the low-speed shaft could be expressed by the coefficient . The gearbox ratio is represented by , and the high-speed part of the gearbox is described by the corresponding stiffness () and the damping () coefficients.
The model presents three main inputs (): the thrust force applied by the wind on the turbine (), the torque applied by the wind in the blades (), and the electrical torque applied by the generator to compensate the loads on the high-speed shaft (). Two important parameters frequently used for optimizing wind turbine performance are the yaw () and the pitch angle (). The following equations are used to describe the doubly fed induction generator (DFIG) wind turbine mechanical modeling.
The kinetic energy, the potential energy, and the dissipation function of a DFIG wind turbine can be expressed in the following form:
where
Applying the Euler–Lagrangian approach to Equations (4)–(6) gives the following equations of motion:
The above equations of motion from (9) to (13) can be written in matrix form as follows:
Using Equation (1) and Equations (14)–(17), the following equation can be derived:
Equation (18) could be re-written in the traditional state-space representation form:
Applying the state-space representation to the system, the following equation is obtained:
where Equation (23) is a system of three inputs and five outputs. The following is the representation of
matrix:
Finally, the state-space representation matrices could be written as:
2.3. Wind Turbine Transfer Matrix
Using the state-space matrices, the transfer function matrix is obtained that represents the system dynamics:
The system outputs are described as:
where the inner terms of the transfer function matrix could be described as:
Considering the inputs of the transfer function, according to the equations developed for the study of wind turbine aerodynamics, the thrust force (
) applied by the wind on the rotor blades and the aerodynamic torque (
) that the air exerts on the wind turbine rotor are expressed as:
where
is the density of the air,
and
are the thrust and the aerodynamic power coefficients as a function of pitch angle,
and tip speed ratio,
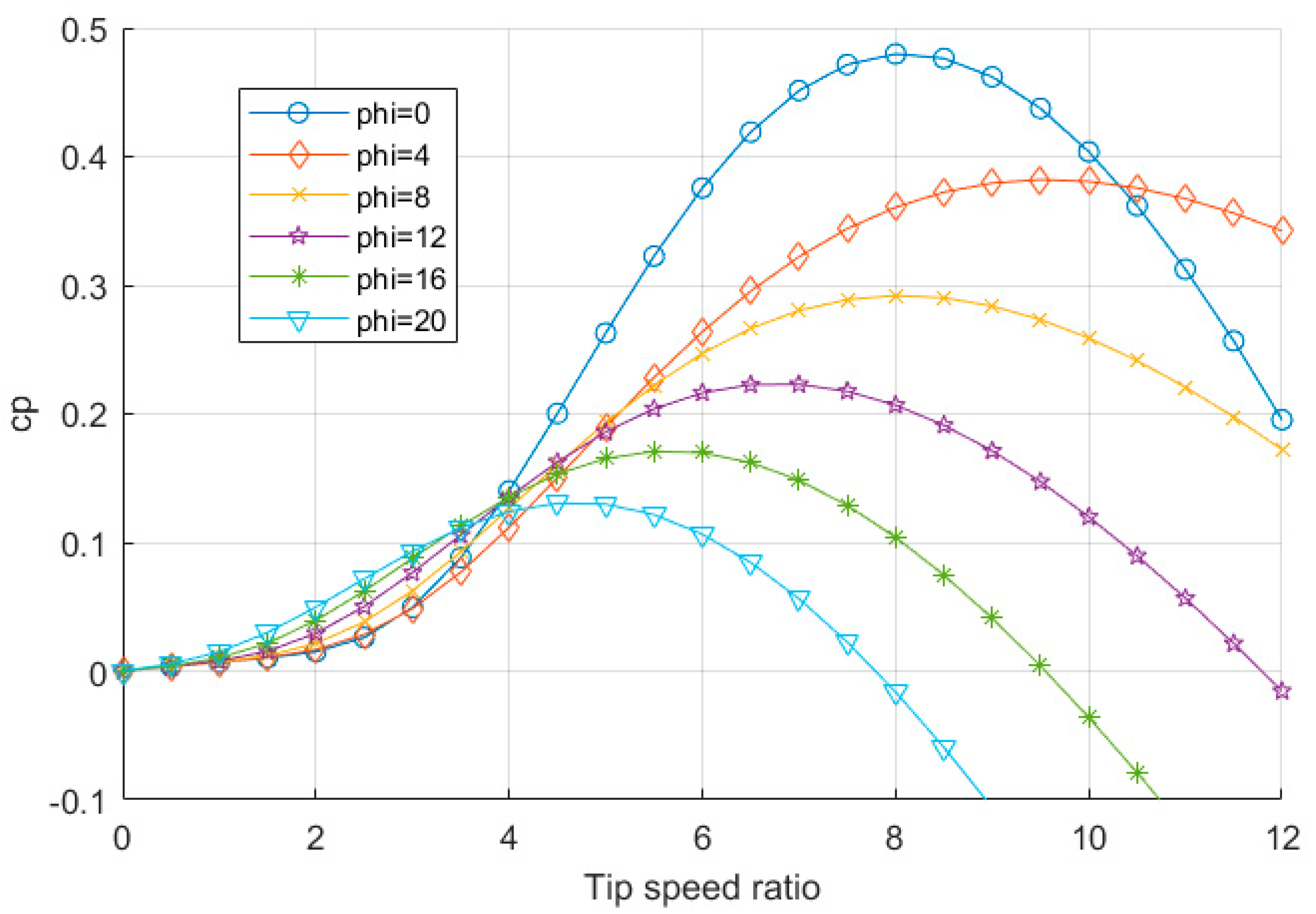
, respectively. The power coefficient is the product of aerodynamic torque coefficient
) and tip speed ratio (
), and the numerical approximation of the aerodynamic power coefficient (
Figure 2) is given by the following equation:
where
and the coefficient values according to [
10] are
= 0.5176,
= 116,
= 0.4,
= 5,
= 21,
= 0.0068,
= 0.09,
= 0.035.
The wind turbine plant transfer functions for pitch control
and torque control
for the 2 MW and the 5 MW wind turbines are as follows:
It should be noted that only the values of the parameters change for 2 MW and 5 MW wind turbines, and the transfer functions remain the same. The same transfer function is used for the case study in
Section 6. The 2 MW and the 5 MW wind turbine parameters used for the simulation are of doubly-fed induction generator wind turbines [
14,
15] as given in
Table 2.
3. Adaptive Control Algorithm
This section focuses on the formulation and the design of a simple direct adaptive control algorithm [
16]. Consider the linear time-invariant plant:
where
and
are plant matrices,
is the state vector,
is the control vector, and
is the plant output vector. Elements of
and
are assumed to be bounded between some upper (
) and lower (
) bounds:
where
and
are the
elements of
and
respectively.
The main objective here is to find a control
without explicit knowledge of
and
that follows the output of the following reference model:
The model has desired plant behavior. However, the model choice is not restricted. The order of the plant may be much larger compared to the reference model such that:
The reference model must have the same number of outputs as the plant. The adaptive control signal composed of the error in the feedback, the model states, and the model input in the feed-forward, as shown in
Figure 3, is given below:
where
,
,
are adaptive gains on error, model state, and model input, respectively, and (
) is the output error, also denoted as
.
The adaptive gain is the sum of proportional gain
and integral gain
which are written as follows:
where:
where
,
and
are time-invariant weighting matrices for proportional gains.
,
and
are the time-invariant weighting matrices for integral gains, and
takes values between 0.05 and 0.1.
For asymptotic tracking, the plant must be almost strictly positive real (ASPR), which means there exists a positive definite gain matrix
not needed for implementation such that the closed-loop transfer function:
is strictly positive real (SPR).
is the transfer function of the plant in consideration and is ASPR if (a) it is a minimum phase, (b) it has a relative degree of one or zero, (c) it has a positive definite high-frequency gain. In general, most physical plants may not satisfy the ASPR conditions due to the restrictive nature. Such plants of the form
given in Equation (28) can be made ASPR with augmentation of a feed-forward compensator
[
16].
where
is the augmented ASPR plant transfer function.
Compensator Design
To implement the adaptive control algorithm, the wind turbine plant transfer function must be ASPR, as mentioned above. In region three for the pitch control, the wind turbine plant transfer function for 2 MW and 5 MW given in Equation (51) is ASPR because the relative degree is one, it is a minimum phase, and it has a positive definite high-frequency gain. Hence, there is no need to design a compensator for pitch control. In regions one and two for the torque control, the wind turbine plant transfer function for 2 MW and 5 MW shown in Equation (52) is non-ASPR because it does not satisfy the relative degree condition. In order to make the plant transfer function as an ASPR, a feed-forward compensator has to be augmented in parallel to the plant transfer function.
Assume a non-ASPR plant of the form:
where the coefficients
and
can take any values within the given upper (u) bound and lower (l) bound:
It is also assumed that the nominal plant parameters, the upper bound and the lower bound values of the plant, along with the degrees (m, n) are known. The feed-forward compensator is selected such that it has the same order (n) as that of the plant.
This compensator will always satisfy the relative degree condition. The denominator coefficients of
are determined in a way to make the compensator time constant faster than the reference model because of the condition that the feed-forward compensator transients should be much faster than the reference model transients. The numerator polynomial coefficients, which guarantee the stability of the closed-loop characteristic equation, are found using an optimization algorithm as discussed below:
where
is the coefficient of numerator polynomial of the compensator, and
is the numerator polynomial of the augmented plant transfer function, as given in Equation (68). The optimization is carried out using the
command in the MATLAB. The objective function is the summation of squares of the coefficients of numerator polynomial of the compensator
. The constraints for the optimization are applied using 2 MW parameters as lower bound and 5 MW parameters as upper bound. From the optimization, the coefficients are extracted, and the compensator is designed, which makes the plant ASPR. In the following section, the compensator designed for the plant is given along with the parameter values used for the simulation.
4. Simulation
The adaptive control model is designed and implemented on the 2 MW and the 5 MW wind turbine models using MATLAB/Simulink software to analyze the performance and the stability of the higher-order dynamic system of the wind turbine. It is important to note that the same compensator model is used for the 2 MW and the 5 MW wind turbine plants. The simulation is done to verify the rotor speed tracking performance of the designed adaptive control strategy. The wind turbine plant adaptive controller block diagram is as shown in
Figure 4. The torque controller is enabled when the wind speed is less than the rated wind speed for region one and region two, where the rotor angular speed is controlled to optimize the aerodynamic efficiency by varying the generator torque (
Tg). The pitch controller is enabled when the wind speed is equal to or greater than the rated wind speed for region three, where the rotor speed is controlled to extract the rated wind power, reduce the aerodynamic loads due to high turbulent wind speeds, and maintain the structural safety by varying the pitch angle, phi (
).
The feed-forward compensator initially found as below in Equation (73) has the same order as the plant for the simplicity of calculations. The denominator of the compensator is predetermined such that the compensator poles are much farther from the poles of the plant to eliminate any effects at a steady state or let the transients of the compensator diminishes quickly.
The numerator polynomial coefficients are determined using the procedure as discussed in Equation (72). The optimization algorithm returns the following values for the numerator polynomial coefficients, as shown in
Table 3.
Wind speed distribution used for the simulation is approximated by using Gaussian probability density function [
17] given by:
where
is the wind speed,
is the mean wind speed, and
is the standard deviation of wind speed. The time-invariant weights
,
, and
for proportional gains and
,
and
for integral gains used for the simulation are given in
Table 4.
It is important to note that the weights of the adaptive gains remain the same for all the cases of simulation and still could give a satisfactory tracking of the output. The next section presents the results obtained from the simulation done in MATLAB/Simulink for pitch control, torque control, and combined control for the 2 MW and the 5 MW wind turbines.
6. Case Study
In this case study, the proposed control strategy was validated using the real wind data and the wind turbine working in Chapman Ranch wind farm. Chapman Ranch wind farm is located outside Corpus Christi, Texas with 81 wind turbines operating at an overall capacity of 249.075 MW [
18]. The wind turbine has three blades with a rotor diameter of 100 m and a tower height of 90 m. The main parameters [
19] of the wind turbine are given in
Table 5.
Wind data for the year 2018 were obtained from the historical weather data of Corpus Christi Naval Air Station which is close to the wind farm. Several factors that influence the real-time wind speed, such as temperature, pressure, relative humidity, wind direction, etc., were taken into consideration. The wind speed data at the hub height was obtained using the wind profile power law, as given in Equation (75):
where
is the wind speed at tower height
= 90 m,
is the wind speed at
= 5 m, and
is the power-law wind shear exponent (0.19 for pasture terrain) [
20].
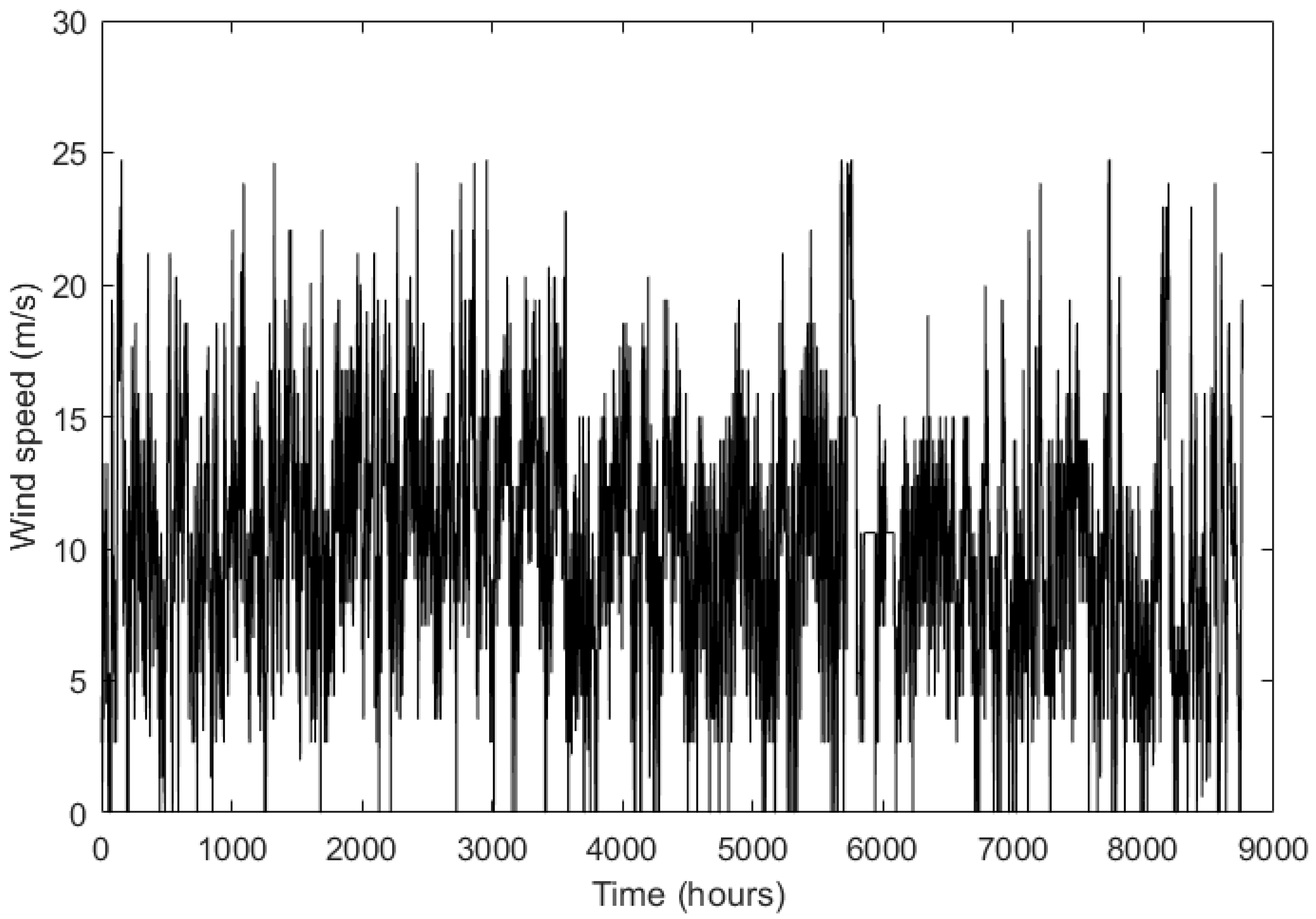
The distribution of wind speed with a range from 0 to 25 m/s for the year 2018 at the Chapman Ranch wind farm is shown in
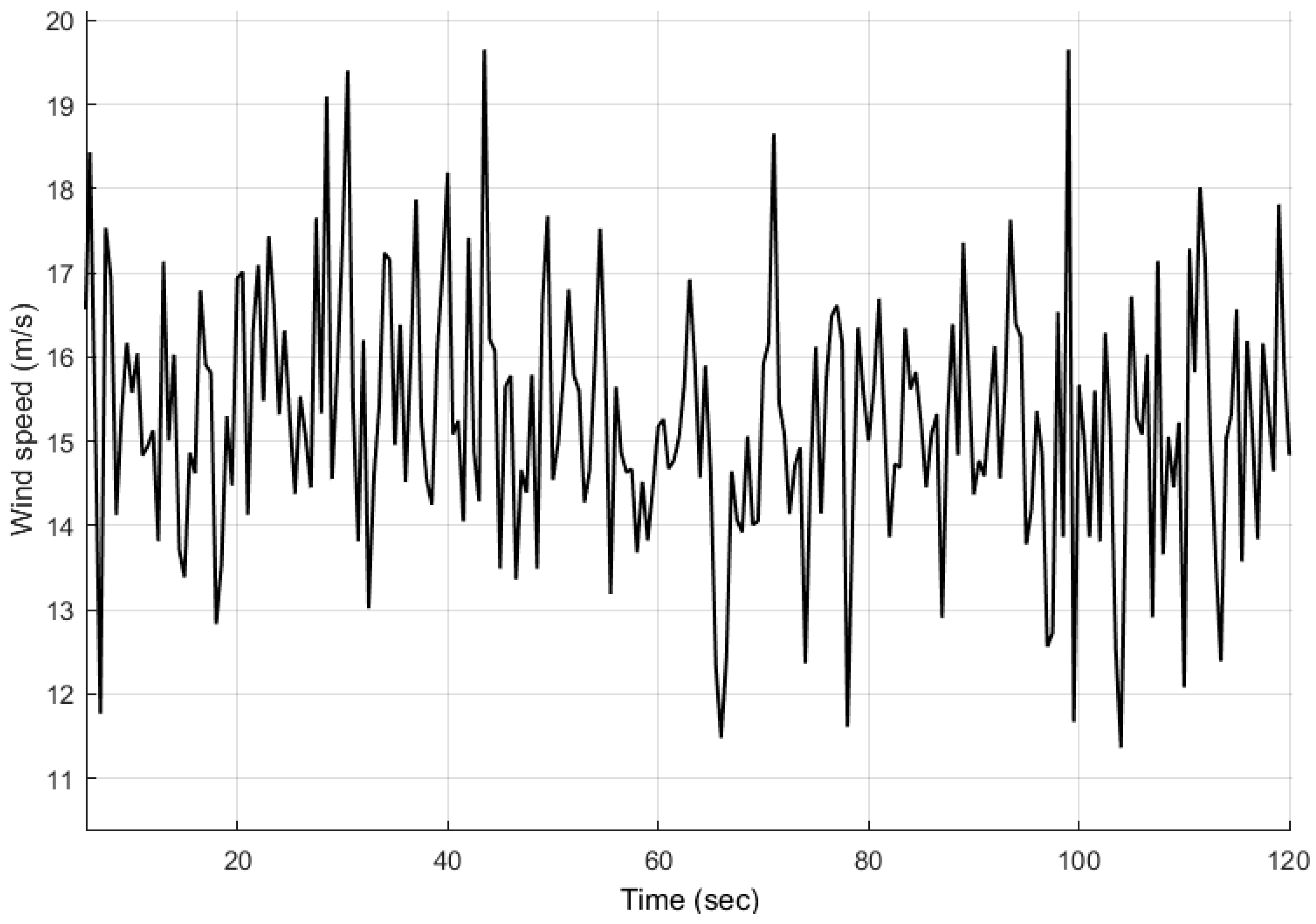
Figure 13. These hourly wind speed values are statistically analyzed to obtain the wind speed series between the successive seconds using Gaussian distribution given by Equation (74). The mean wind speed and the standard deviation used for the Gaussian distribution are 10.38 and three. The wind speed generated using the Gaussian distribution, which is given as disturbance input to the wind turbine model, is shown in
Figure 14. The reference model and the compensator model for this case study are the same as the 2 MW and the 5 MW wind turbine plants.
The rotor speed tracking of the wind turbine in the case study is given in
Figure 15. The short spikes in the result correspond to the spikes in the wind speed distribution, where the wind speed shifts between the three regions of operation. Similar to the combined case explained in
Section 5.3, the adaptive controller design ensures the satisfactory tracking of the rotor speed in all operating regions of the wind turbine.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}