Identification, Categorisation and Gaps of Safety Indicators for U-Space

 ,
,  ,
, 
Abstract
1. Introduction
- NASA developed the first UTM framework in 2013 which was adopted by the Federal Aviation Administration (FAA) to develop its implementation in the United States [4]. UTM framework foresees three operational environments for unmanned aircraft: operations in uncontrolled airspace, operations within controlled airspace but segregated from manned aircraft and joint operations with manned aircraft in controlled airspace.
- Europe’s roadmap for unmanned aircraft is denoted as U-space [5]. U-space encompasses the integration for every airspace and airspace user. The main goal is to introduce unmanned air traffic gradually into the airspace, starting from lower airspace volumes and expanding to higher airspace classes until achieving full integration with manned aircraft.
- Civil UAS Operation Management System (UOMS) is the UTM system proposed by the Chinese government [6]. UOMS is a cloud system coordinated with unmanned operators that allow the flight management in real-time with ATM system, it supports communications between unmanned aircraft and provides information to authorities.
- The Japan UTM Consortium (JUTM) is constituted by several airspace users of UAS, data providers and operators [7]. JUTM manages flight plans, emergency alerts and provides instruction to avoid conflicts. First demonstrations took place in 2017 and its implementation is expected to start progressively after 2020.
2. U-space Description
- Ensure the safety of every airspace user that operates in the U-space framework, as well as affected third-parties (such as pedestrians).
- Provide a flexible, adaptable and scalable system that can respond to the uncertainty of demand, technology and business models whilst cooperating with manned aircraft.
- Allow fleet operations of automated drones in high-density scenarios.
- Ensure equal and fair access to the airspace for every airspace user.
- Provide continuous, cost-effective and competitive services to support various business models for unmanned aircraft operators.
- Minimise the operational costs based on the implementation, services, communications and infrastructure (including GNSS).
- Accelerate the implementation of U-space through new technologies and standards.
- Ensure the approach based on risk, safety and performance. These requirements should be approved based on safety, cybersecurity and resilience whilst reducing their impact on the environment and prioritizing data protection.
- Phase U1: The provision of basic services whose main goals are: To identify unmanned aircraft and operators; to inform about the existence of segregated areas; to facilitate administrative procedures of the flight approval and to authorise specific missions. This will open up visual line of sight (VLOS) operations in cities and extended VLOS operations in rural environments. Beyond VLOS (BVLOS) operations will be possible but still quite restricted.
- Phase U2: This phase refers to an initial set of services that support the safe administration and management of unmanned aircraft. It provides the first level of connection with ATM, ATC and manned aviation. Where implemented, U2 will take advantage of the existing ATM infrastructure and exploit new available technologies. VLL operations will evolve to include operations in controlled airspace. Unmanned flights will not be evaluated individually and some BVLOS operations will become routine.
- Phase U3: This phase evolves from the experience obtained during the U2 phase and will use new applications or missions based on high-density and complex areas. New technologies and automated functionalities (such as ’detect and avoid‘) and new means of communication will allow for a significant increase in operations in all environments. In this phase, a high increase in unmanned operations is expected, especially in urban areas.
- Phase U4: This phase will integrate ATM functionalities to both manned and unmanned aircraft. It will provide the full deployment of U-space based on a high degree of automation.
3. Hazard and Risk Categorisation and Identification
3.1. Hazard and Risk Categorisation
- Vehicle reliability, equipment and redundancy. Any problem associated with the different vehicle elements and components that can affect the proper execution of the operation. Hence, it is necessary to bear in mind the failure rate of the mechanical components, the expected behaviour of the batteries, system redundancy, navigation and positioning systems.
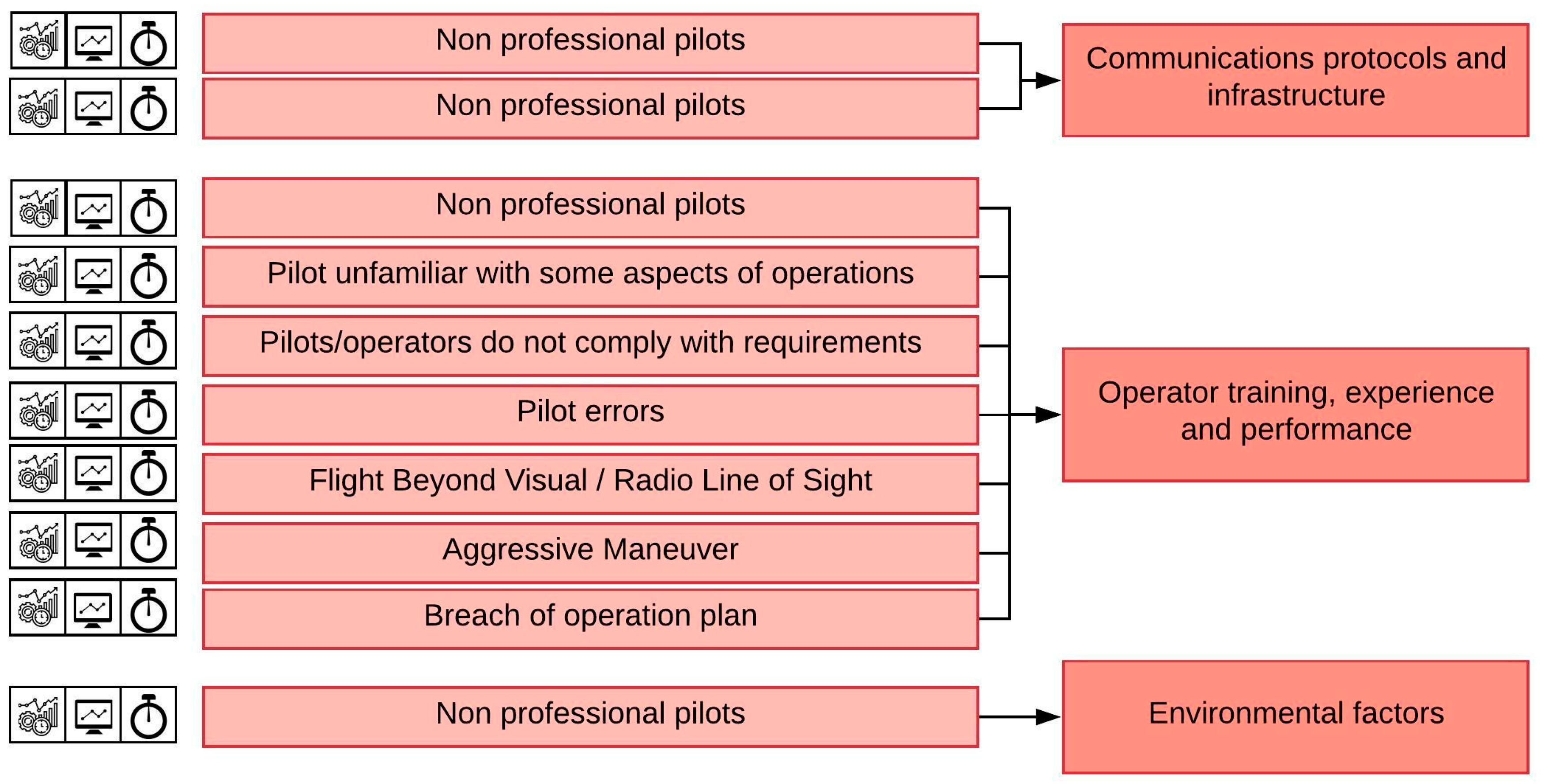
- Communication protocols and infrastructure. The latency during the reception and communication of the control instructions (or the lack of ability to answer) represents an operational risk depending on the requirements of the airspace. Besides, communication flow must be ensured between all the elements involved (pilot, observer, ground control system and aircraft).
- Operator training, experience and performance. The flight of unmanned aircraft relies heavily upon the decisions made by the pilot during (or before) the operation. Therefore, the qualification, experience and performance of the operator is a crucial factor that can affect the safety of unmanned operations.
- Airspace usage and rules. The collision risk increases in high-density scenarios because of a large number of users. However, collision risk does not simply depend on the airspace class or the density of air traffic, but it significantly varies with risk exposure.
- Environmental factors. Weather is a common and crucial factor of typical accidents or incidents in manned aviation. It is expected to affect unmanned aircraft to a large degree because of their lower speed and weight. Moreover, the operation of unmanned aircraft close to urban areas may imply new weather aspects to consider because of their proximity to high-rise buildings.
- Population density, land use patterns and building/obstacle height/density patterns. The operation of unmanned aircraft close to urban areas entails an increase of the operational risk due to their proximity to pedestrians and infrastructure. Therefore, authorities can limit or inhibit the operation of unmanned aircraft around critical areas, such as hospitals and government buildings.
- Air collision: Collision between two unmanned aircraft or between unmanned and manned aircraft. The consequences are categorised according to ICAO Annex 19 [27].
- Collision with obstacles: Unmanned aircraft can cause damage to third-party holdings or fauna.
- Collision with infrastructure: Unmanned aircraft may cause damage to third-party holdings. If the infrastructure is denoted as critical, collisions can imply a risk to human health, national security or the interruption of critical services for society.
- Collision with humans. The consequences may imply injury or even death.
3.2. Hazard and Risk Identification
4. U-space Safety
- Unmanned systems similar to manned aviation (with a very low rate of incidents and accidents) may give a false impression that they are just as safe.
- The availability of operational information for different stakeholders (pilot, ATC and ANSP) is not immediate, which can delay the inclusion of measures to mitigate risk.
- By only considering the outcomes, few systemic, dangerous or latent factors can be detected.
- Outcome or lagging indicators: This type of indicator measures safety critical events that have already happened. They lay down a way to validate the safety performance of the system. Moreover, the evolution of these indicators can be used to detect if latent conditions exist in the current systems.
- Leading indicators: This type of indicator provides information about the current system and the way it can affect future performance. Therefore, lagging indicators measure aspects that potentially have a negative effect in the future and elements that contribute to safety They are further divided into two groups depending on the information they provide:
- −
- Driving indicators: They are preliminary indicators that denote priorities in terms of safety and they constitute the actions for risk mitigation. Thus, this type of indicator helps to proactively improve safety management capacities.
- −
- Monitoring indicators: They are complex indicators that provide information about the dynamic state of the system and how to face possible changes. They contribute to detect weaknesses and vulnerabilities that can arise during the operation, i.e., they focus on the surveillance process of the system and operations.
4.1. U-space Safety Framework
4.2. U-space Safety Indicators
5. Gaps in U-space Services
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- U.S. Department of Defense. US Army Unmanned Aircraft Systems Roadmap 2010-2035; U.S. Department of Defense: Arlington, VA USA, 2010. [Google Scholar]
- SESAR Joint Undertaking. European Drones Outlook Study; SESAR Joint Undertaking: Brussels, Belgium, 2016. [Google Scholar]
- EUROCONTROL. European Aviation in 2040—Challenges of Growth; EUROCONTROL: Brussels, Belgium, 2018. [Google Scholar]
- Kopardekar, P.; Rios, J.; Prevot, T.; Johnson, M.; Jung, J.; Robinson, J.E., III. UAS Traffic Management (UTM) Concept of Operations to Safely Enable Low Altitude Flight Operations. In Proceedings of the 16th AIAA Aviation Technology, Integration and Operations Conference, Washington, DC, USA, 13–17 June 2016; pp. 1–16. [Google Scholar] [CrossRef]
- SESAR Joint Undertaking. U-space blueprint—SESAR Joint Undertaking; SESAR Joint Undertaking: Brussels, Belgium, 2017. [Google Scholar]
- Zhang, J. UOMS in China. In Proceedings of the EU-China APP Drone Workshop, Shenzhen, China, 6–8 June 2018. [Google Scholar]
- Ushijima, H. UTM Project in Japan. In Proceedings of the Global UTM Conference, Montreal, QC, Canada, 26 June 2017. [Google Scholar]
- Dalamagkidis, K.; Valavanis, K.P.; Piegl, L.A. On unmanned aircraft systems issues, challenges and operational restrictions preventing integration into the National Airspace System. Prog. Aerosp. Sci. 2008, 44, 503–519. [Google Scholar] [CrossRef]
- Clothier, R.A.; Palmer, J.L.; Walker, R.A.; Fulton, N.L. Definition of an airworthiness certification framework for civil unmanned aircraft systems. Saf. Sci. 2011, 49, 871–885. [Google Scholar] [CrossRef]
- Clothier, R.A.; Williams, B.P.; Fulton, N.L. Structuring the safety case for unmanned aircraft system operations in non-segregated airspace. Saf. Sci. 2015, 79, 213–228. [Google Scholar] [CrossRef]
- Clothier, R.A.; Greer, D.A.; Greer, D.G.; Mehta, A.M. Risk Perception and the Public Acceptance of Drones. Risk Anal. 2015, 35, 1167–1183. [Google Scholar] [CrossRef] [PubMed]
- Lum, C.; Waggoner, B. A Risk Based Paradigm and Model for Unmanned Aerial Systems in the National Airspace. In Proceedings of the AIAA Infotech@Aerospace Conference, St. Louis, MI, USA, 29–31 March 2011; pp. 1–31. [Google Scholar] [CrossRef]
- Pérez-Castán, J.A.; Gómez Comendador, F.; Rodríguez-Sanz, A.; Armas Cabrera, I.; Torrecilla, J. RPAS conflict-risk assessment in non-segregated airspace. Saf. Sci. 2019, 111, 7–16. [Google Scholar] [CrossRef]
- Pérez-Castán, J.A.; Comendador, F.G.; Rodríguez-Sanz, Á.; Valdés, R.M.A.; Torrecilla, J. Conflict-resolution algorithms for RPAS in non-segregated airspace. Aircr. Eng. Aerosp. Technol. 2019, 91, 366–372. [Google Scholar] [CrossRef]
- Clothier, R.A.; Walker, R.A. Safety Risk Management of Unmanned Aircraft Systems. In Handbook of Unmanned Aerial Vehicles; Springer Science+Business Media: Berlin, Germany, 2015; pp. xix–xxi. [Google Scholar]
- Allouch, A.; Koubaa, A.; Khalgui, M.; Abbes, T. Qualitative and Quantitative Risk Analysis and Safety Assessment of Unmanned Aerial Vehicles Missions over the Internet. IEEE Access 2019, 7, 53392–53410. [Google Scholar] [CrossRef]
- Weibel, R.; Hansman, R.J. Safety Considerations for Operation of Different Classes of UAVs in the NAS. In Proceedings of the AIAA 3rd “Unmanned Unlimited” Technical Conference Workshoop Exhibit, Chicago, IL, USA, 20–23 September 2004; pp. 1–11. [Google Scholar] [CrossRef]
- EASA. Report UAS Safety Risk Portfolio and Analysis; EASA: Cologne, Germany, 2016. [Google Scholar]
- Wackwitz, K.; Boedecker, H. Safety Risk Assessment for UAV Operation; Drone Industry Insights: Hamburg, Germany, 2015. [Google Scholar]
- Jenie, Y.I.; Van Kampen, E.-J.; Ellerbroek, J.; Hoekstra, J.M. Safety Assessment of Unmanned Aerial Vehicle Operations in an Integrated Airspace. In Proceedings of the AIAA Infotech @ Aerosp., San Diego, CA, USA, 4–8 January 2016; pp. 1–11. [Google Scholar] [CrossRef]
- Kuchar, J.; Andrews, J.; Drumm, A.; Hall, T.; Heinz, V.; Thompson, S.; Welch, J. A safety analysis process for the Traffic Alert and Collision Avoidance System (TCAS) and see-and-avoid systems on remotely piloted vehicles. In Proceedings of the AIAA 3rd “Unmanned-Unlimited” Technical Conference Workshop Exhibit, Chicago, IL, USA, 20–23 September 2004; Volume 1, pp. 352–364. [Google Scholar] [CrossRef]
- Karanikas, N.; Kaspers, S. Finalisation and Application of New Safety Management Metrics; Amsterdam University of Applied Sciences: Amsterdam, The Netherlands, 2018. [Google Scholar]
- SESAR Joint Undertaking. European ATM Master Plan: Roadmap for the Safe Integration of Drones into All Classes of Airspace; SESAR Joint Undertaking: Brussels, Belgium, 2018. [Google Scholar]
- ICAO. Manual on Remotely Piloted Aircraft Systems (RPAS); ICAO: Montreal, QC, Canada, 2015. [Google Scholar]
- Airbus. Understanding UAV Mission Risk; Airbus: Leiden, The Netherlands, 2018. [Google Scholar]
- Airbus. Building Altiscope’s Risk Framework; Airbus: Leiden, The Netherlands, 2018. [Google Scholar]
- ICAO. Annex 19 - Safety Management; ICAO: Montreal, QC, Canada, 2013. [Google Scholar]
- Belcastro, C.M.; Newman, R.L.; Evans, J.K.; Klyde, D.H.; Barr, L.C.; Ancel, E. Hazards identification and analysis for unmanned aircraft system operations. In Proceedings of the 17th AIAA Aviat. Technol. Integr. Oper. Conf. 2017, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef]
- European Union Aviation Safety Agency. Medición del Rendimiento en Materia de Seguridad Operacional Guía Para Proveedores de Servicio; Safety Management International Collaboration Group: Cologne, Germany, 2013; pp. 1–19. [Google Scholar]
- Reiman, T.; Pietikäinen, E. Leading indicators of system safety – Monitoring and driving the organizational safety potential. Saf. Sci. 2012, 50, 1993–2000. [Google Scholar] [CrossRef]
- Piric, S.; De Boer, R.J.; Roelen, A.; Karanikas, N.; Kaspers, S. How does aviation industry measure safety performance Current practice and limitations. Int. J. Aviat. Manag. 2019, 4, 224. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase | U-space Services | Associated Drone Capabilities |
|---|---|---|
| U1 | e-Registration e-Identification Pre-tactical geofencing | e-Identification Geofencing Security Communication, navigation and surveillance Command and control |
| U2 | Tactical geofencing Tracking Flight planning management Weather information | e-Identification Geofencing Security Telemetry Tracking Vehicle to infrastructure communication Communication, navigation and surveillance Detect and avoid Emergency recovery Command and control Operations management |
| U3 | Dynamic geofencing Collaborative interface with ATC Tactical de-confliction Dynamic capacity management | e-Identification Geofencing Security Telemetry Tracking Vehicle to vehicle communication Vehicle to infrastructure communication Communication, navigation and surveillance Detect and avoid Emergency recovery Command and control Operations management |
| U4 | Full integration of UAV flights into non-segregated airspace | |
| Hazards Identified in Previous Analysis | Hazards Identified by Focus Group |
|---|---|
| Propulsion system failures Battery failures Avionics systems failures Structural failures Redundant systems failures Delays in communications Interference in communication Insufficient data-link security Pilots/operators do not comply with requirements Pilot errors Flight beyond visual/radio line of sight Insufficient geo-fencing Meeting with manned operations Meeting UAS without plan operation High density air traffic Extreme temperatures Rain Snow, ice Wind, shear Reduced visibility Night operations Presence of Wildlife Operations near people Obstacles | UAS performance failures Permanent loss of communication Insufficient standards for communication processes Non-professional pilots Pilot unfamiliar with some operational aspects Aggressive manoeuvre Breach of operation plan Meeting with emergency operations Rugged terrain |
| Hazards. | Indicator | ||
|---|---|---|---|
| Driving | Monitoring | Lagging | |
| Propulsive system failure | Meantime between failures (MTBF) | Fault warning | Number of detected failures |
| Battery failure | |||
| On-board avionics failure | |||
| Structural failure | |||
| Redundancy system failure | |||
| Maintenance failure | |||
| UAS performance failure | |||
| Hazards | Indicator | ||
|---|---|---|---|
| Driving | Monitoring | Lagging | |
| Communication-link disturbances | Failure rate | Noise level | Number of detected events |
| Communication delay | Failure rate | Communication latency | |
| Communication loss | Coverage level for communications before an operation | Real-time coverage level for communications | |
| Communication protocol failures | Prior security level | Real-time level | |
| Datalink security | |||
| Hazard | Indicator | ||
|---|---|---|---|
| Driving | Monitoring | Lagging | |
| Flights operated by non-licensed pilots | Statistics of non-licensed pilots | Real-time detected flights | Number of detected events Number of flights operated by non-licensed pilots |
| Pilot does not fulfil the operational requirements | Historical pilot data | Pilot or ATC report | Number of flights that pilots do not fulfil the requirements |
| Pilot is not familiar with some operational aspect | Pre-survey for pilot awareness | Number of detected events | |
| Pilot failures | Historical pilot data | Number of pilot failures | |
| Loss or inadequate line of sight between the pilot and UAS | Number of detected events | ||
| Aggressive manoeuvre | Number of detected events | ||
| Non-compliance flight plan | Pilot reliability (point-system license) | Flight plan monitoring | Number of flights that violate the flight plan |
| Hazard | Indicator | ||
|---|---|---|---|
| Driving | Monitoring | Lagging | |
| Confusing or poorly defined limits | Historical reports in confusing airspaces | Pilot or ATC report | Number of detected events |
| Flights nearby dangerous or forbidden areas | Number of flight plans operated close to NM | Number of operations close to X NM | Number of detected events |
| Coordination between UAS and manned operations | Number of manned aircraft estimated Is the flight procedure pre-defined? (Yes/No) | Pilot or ATC report | Number of detected events |
| Coordination between UAS and emergency operations | Number of emergency operations estimated | Pilot, ATC or emergency report | Number of detected events |
| Encounters with unplanned UAS | Number of aircraft estimated | Pilot or ATC report | Number of detected events |
| Air traffic high density | Air traffic estimation Workload admissible | Minimum closing time Number of nearby aircraft | Number of detected events |
| Hazard | Indicator | ||
|---|---|---|---|
| Driving | Monitoring | Lagging | |
| Extreme Temperatures | Meteorological forecast | Local meteorological information | Number of detected events |
| Strong winds | |||
| Precipitation | |||
| Ice, snow | |||
| Low visibility | |||
| Wildlife | Wildlife migration patterns | Wildlife monitoring radar | Number of detected events |
| Hazard | Indicator | ||
|---|---|---|---|
| Driving | Monitoring | Lagging | |
| Flights in or closed to cities | Air traffic density Population density | Live population density Live air traffic density | Number of detected events |
| Obstacle presence | Obstacle map Number of flight plan closed to critical obstacles | Number of flights close to critical obstacles | Number of detected events |
| Rugged terrain | Geographical map | Number of flights operating in rugged terrain | Number of detected events |
| U-Space Service | Hazard | |
|---|---|---|
| Airspace management/geo-fencing | Confusing or poorly defined limits Flights nearby dangerous or forbidden areas | |
| Mission management | Non-compliance flight plan | |
| Monitoring Conflict management | Air traffic high density | |
| Emergency management | Encounter with emergency vehicle Alert of vehicle failures | |
| Coordination with ATC | Encounter with manned aircraft | |
| Environment | Meteorological information | Extreme temperatures Strong wind Precipitation, snow, ice Low visibility |
| Population density map | Population close to operations | |
| Geospatial information service | Obstacles Hilly relief | |
| CNS coverage information Disturbance coverage information | Communication disturbances Communication delays Communication failures Total loss of communications | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pérez-Castán, J.A.; Gómez Comendador, F.; Cardenas-Soria, A.B.; Janisch, D.; Arnaldo Valdés, R.M. Identification, Categorisation and Gaps of Safety Indicators for U-Space. Energies 2020, 13, 608. https://doi.org/10.3390/en13030608
Pérez-Castán JA, Gómez Comendador F, Cardenas-Soria AB, Janisch D, Arnaldo Valdés RM. Identification, Categorisation and Gaps of Safety Indicators for U-Space. Energies. 2020; 13(3):608. https://doi.org/10.3390/en13030608
Chicago/Turabian StylePérez-Castán, Javier Alberto, Fernando Gómez Comendador, Ana Belén Cardenas-Soria, Dominik Janisch, and Rosa M. Arnaldo Valdés. 2020. "Identification, Categorisation and Gaps of Safety Indicators for U-Space" Energies 13, no. 3: 608. https://doi.org/10.3390/en13030608
APA StylePérez-Castán, J. A., Gómez Comendador, F., Cardenas-Soria, A. B., Janisch, D., & Arnaldo Valdés, R. M. (2020). Identification, Categorisation and Gaps of Safety Indicators for U-Space. Energies, 13(3), 608. https://doi.org/10.3390/en13030608