An Improved Sensorless Vector Control Method for IPMSM Drive with Small DC-Link Capacitors

Abstract
:1. Introduction
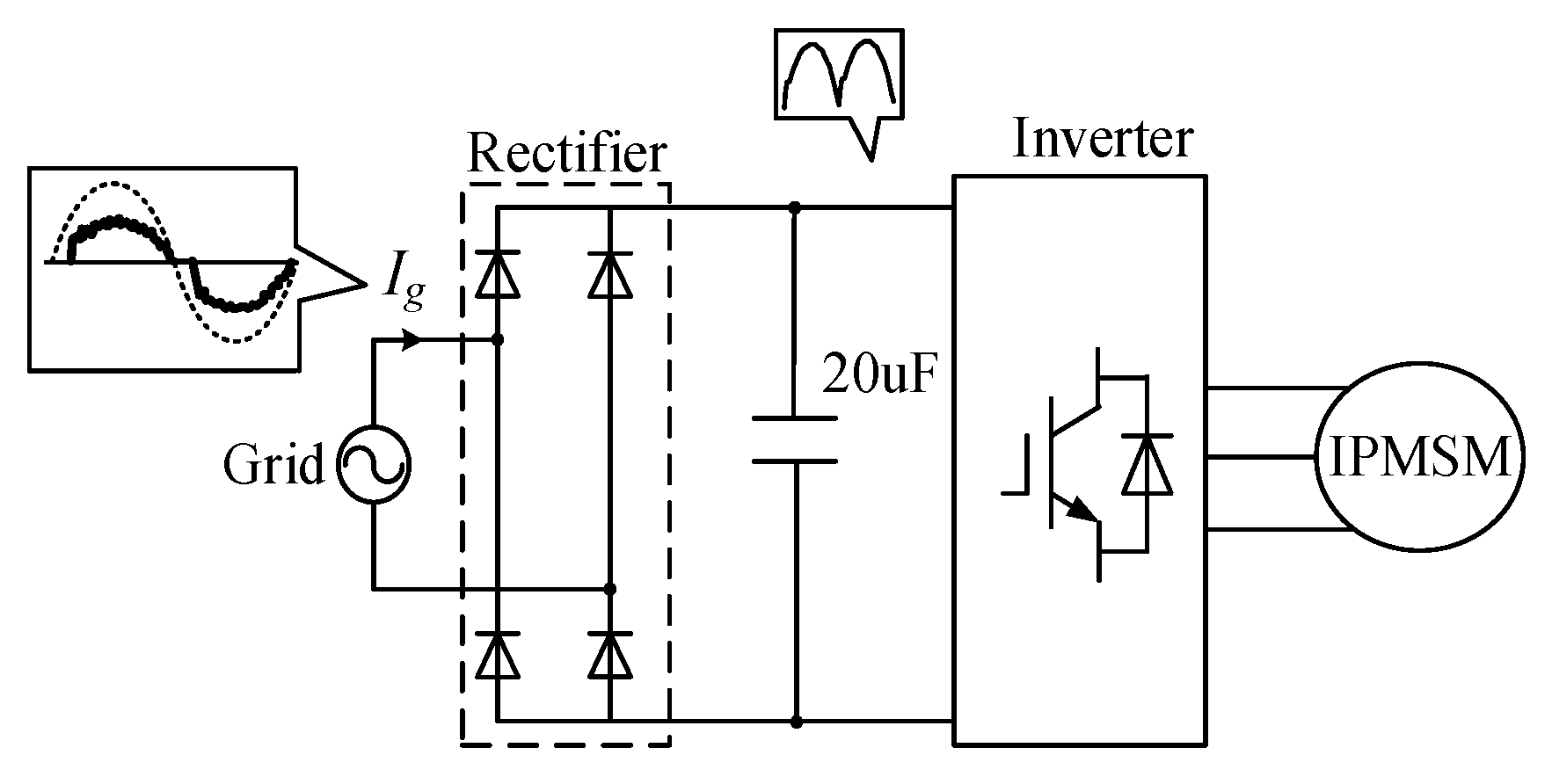
2. Analysis of IPMSM Drive with Small DC-Link Capacitor
2.1. Torque and Speed Characteristics of Small DC-Link Drive System
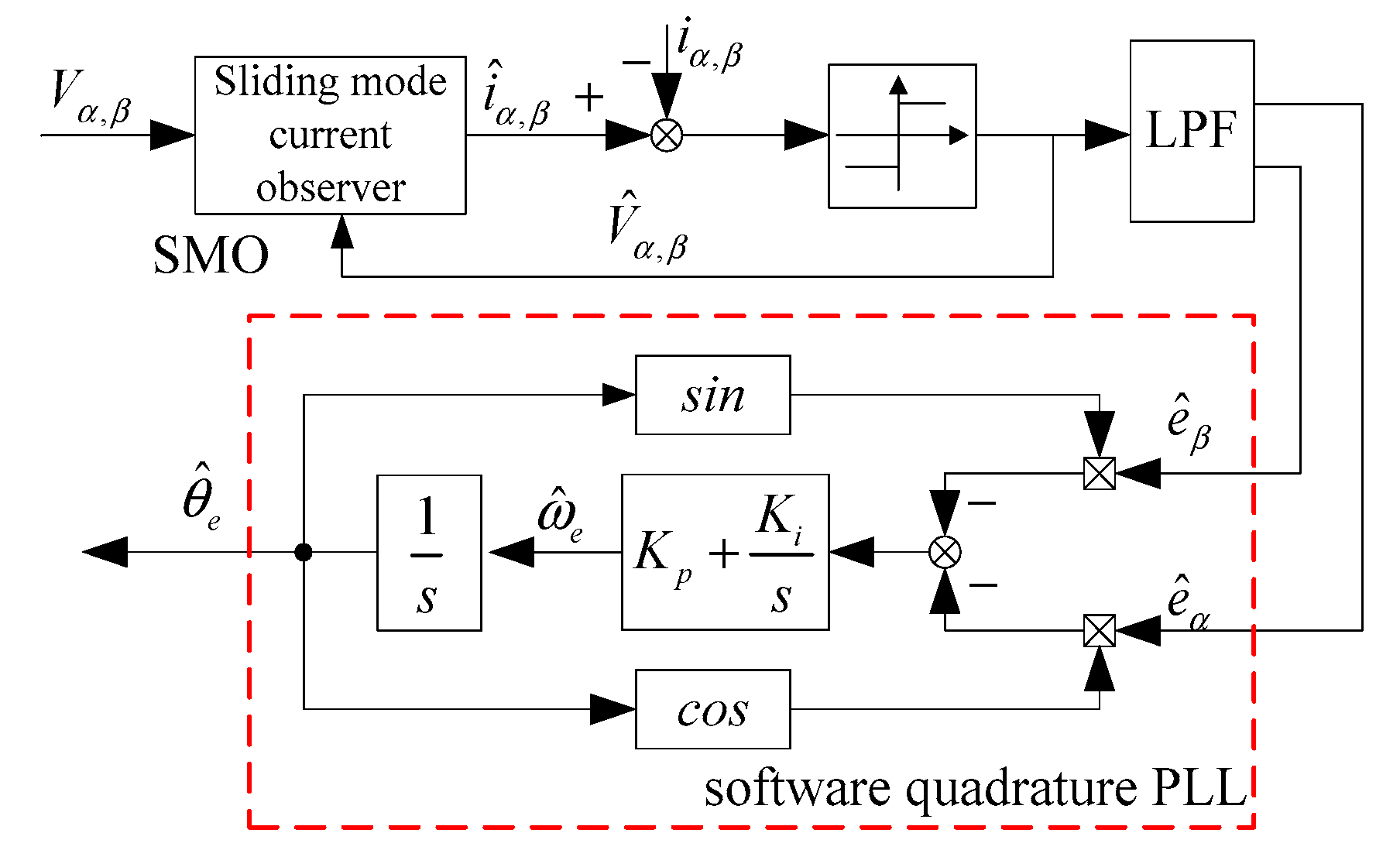
2.2. Position Estimation Based on the SMO
2.3. Problems of SMO with Small DC-Link Capacitor
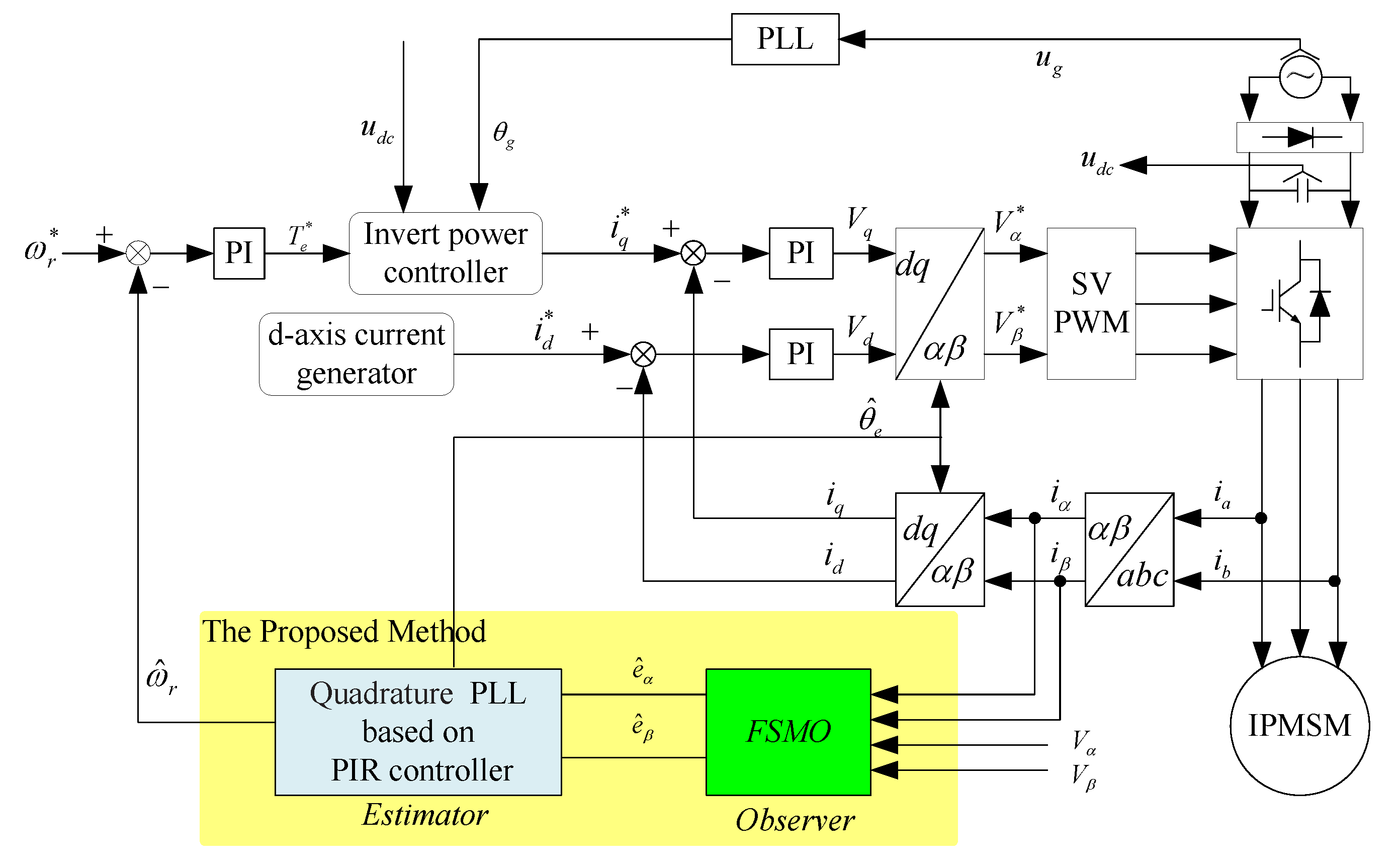
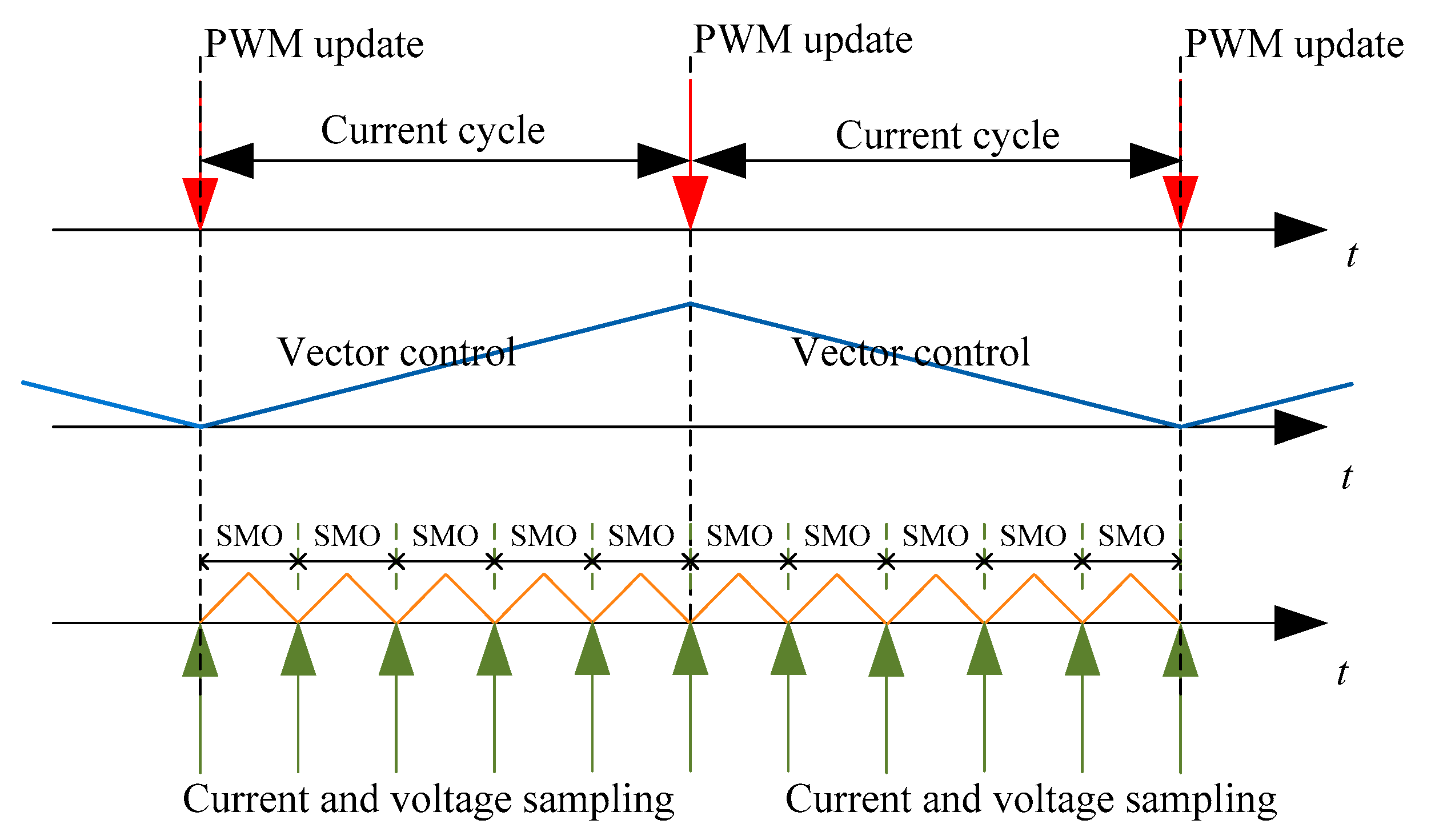
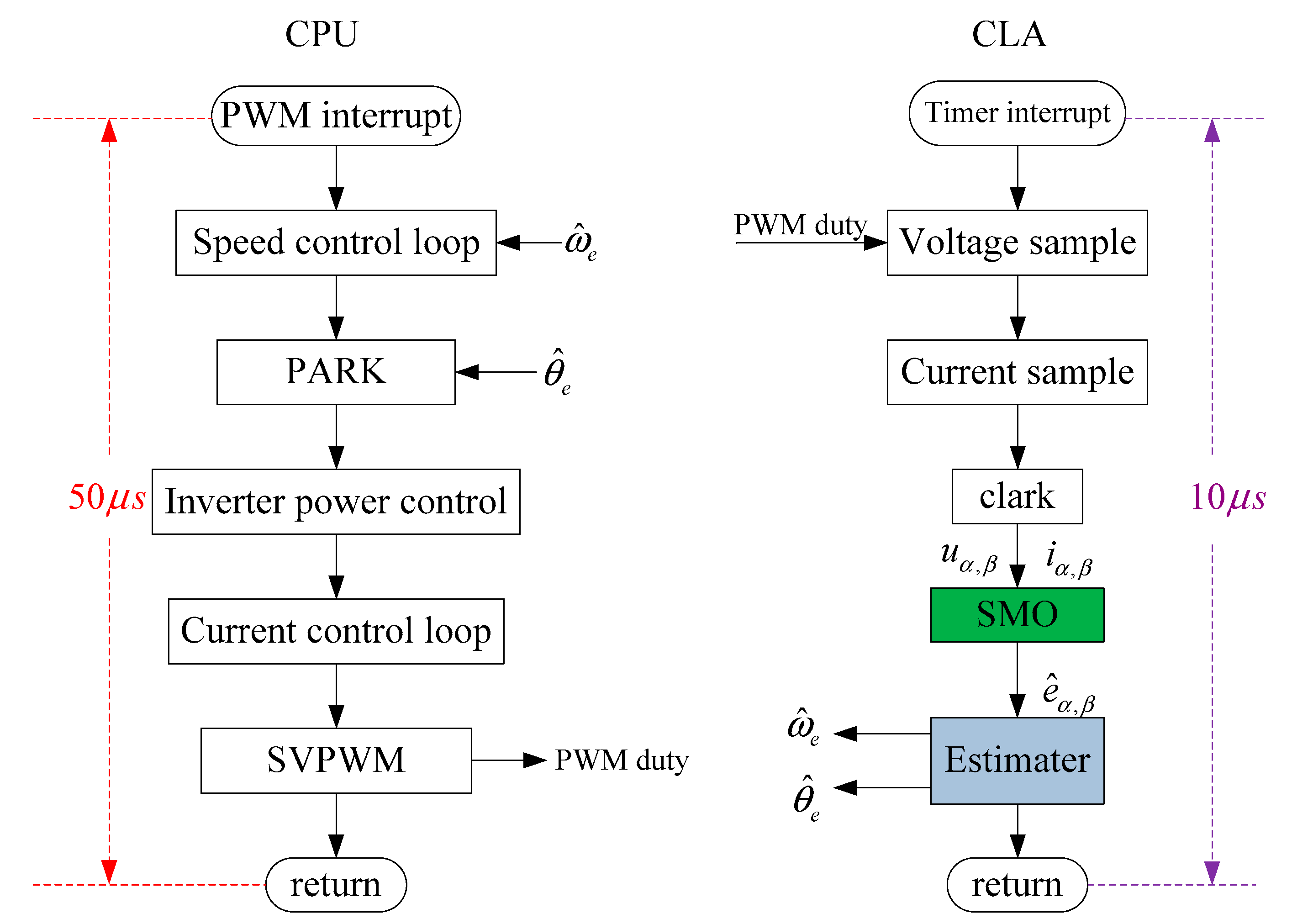
3. The Proposed Sensorless Vector Control Method
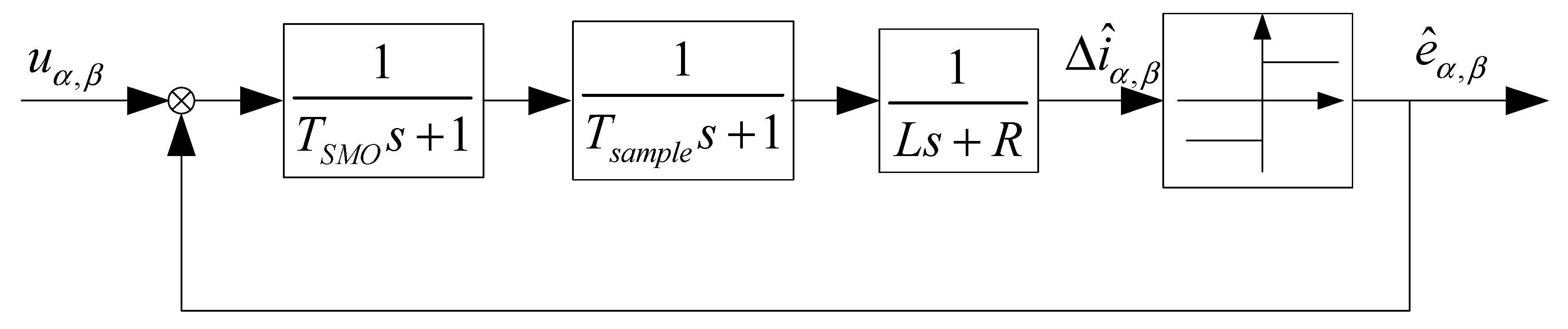
3.1. FSMO
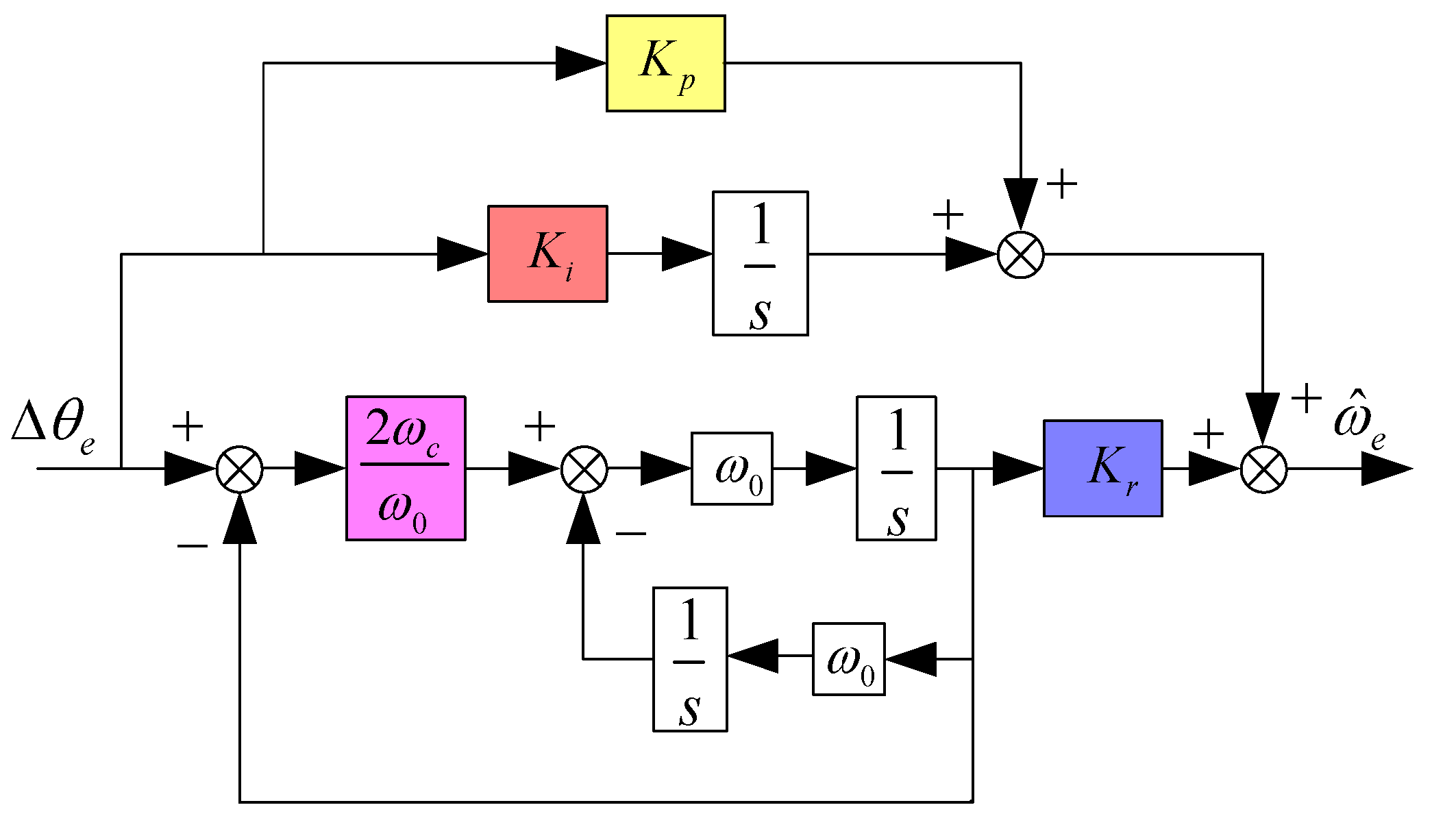
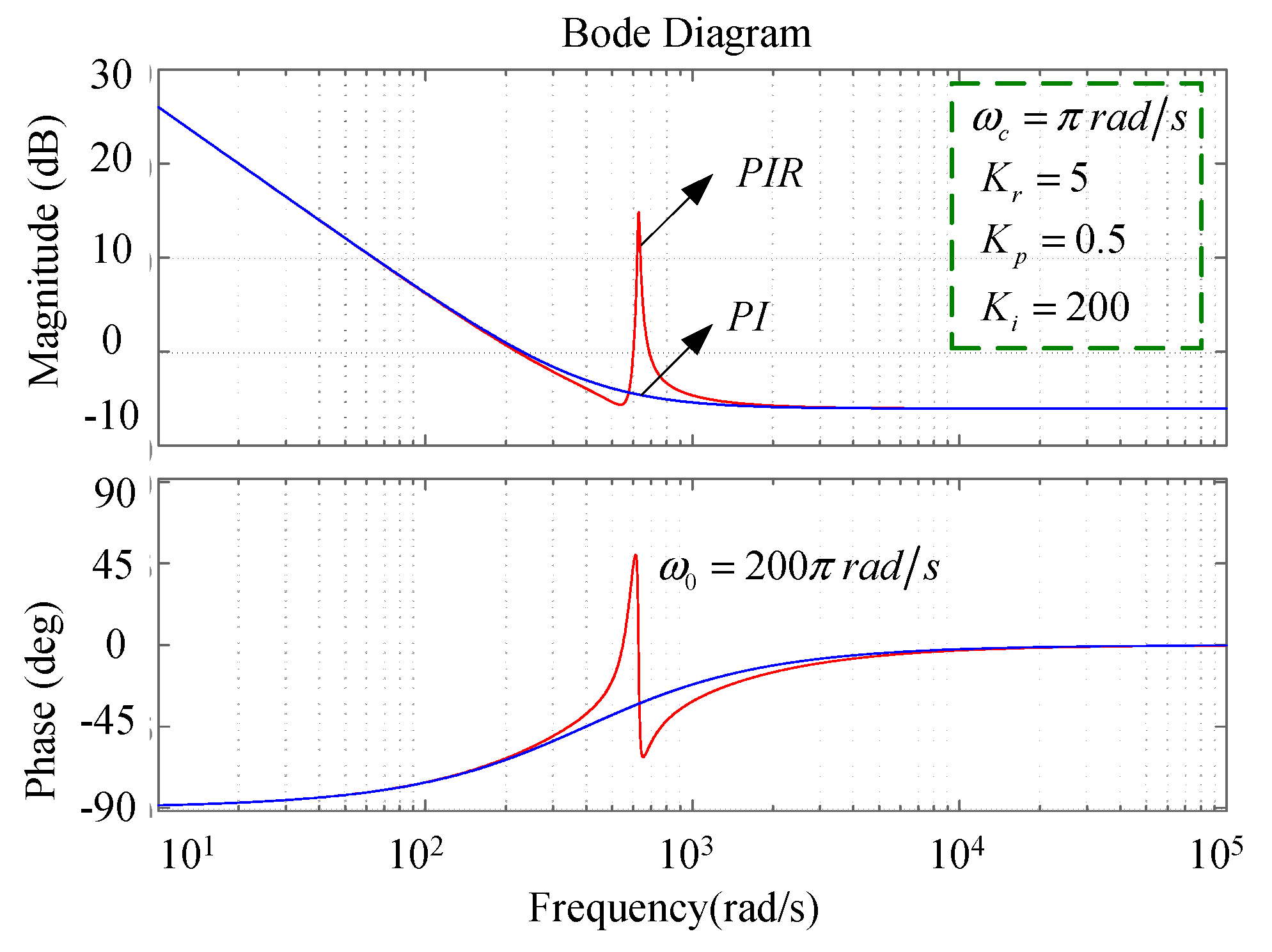
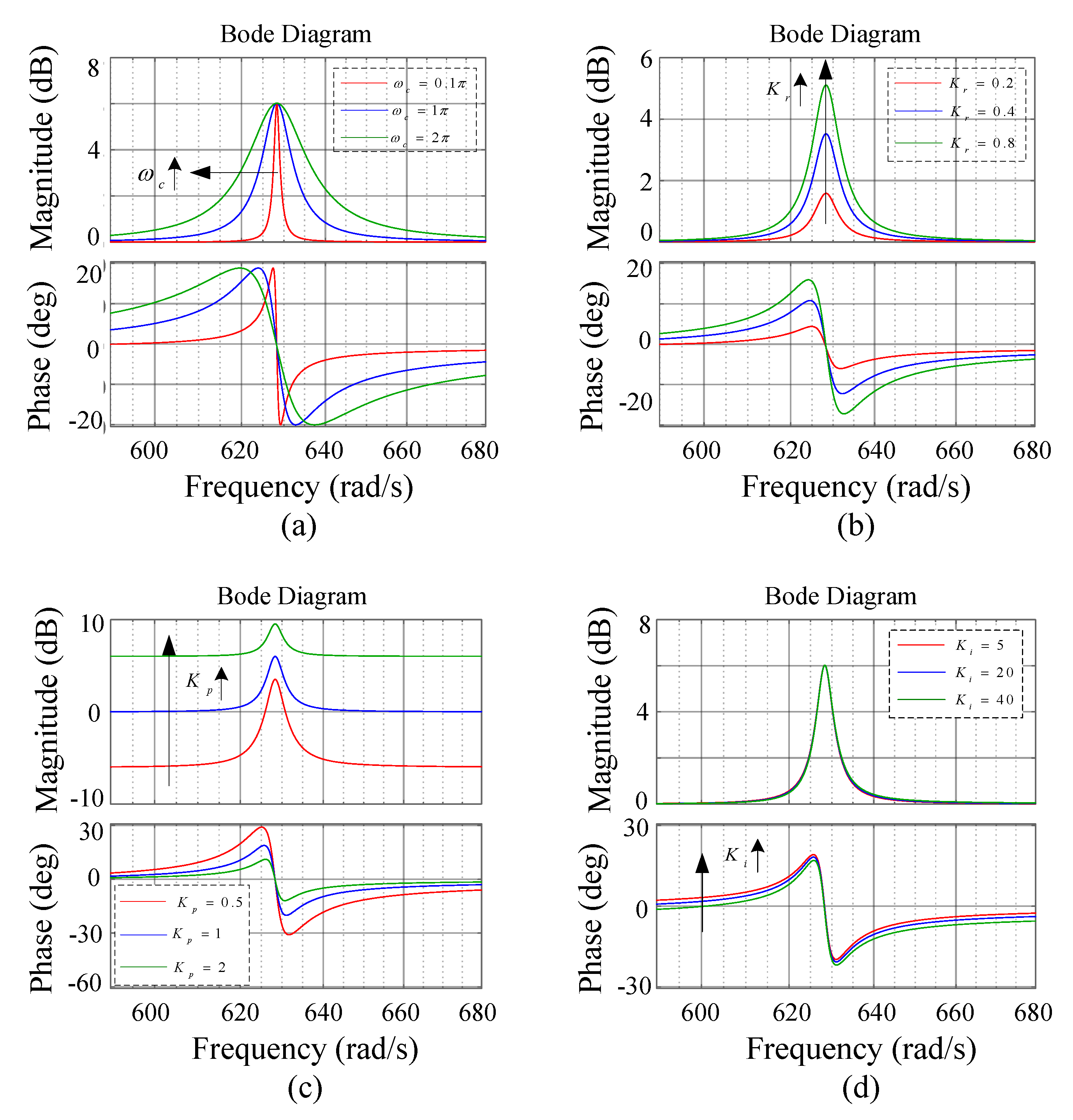
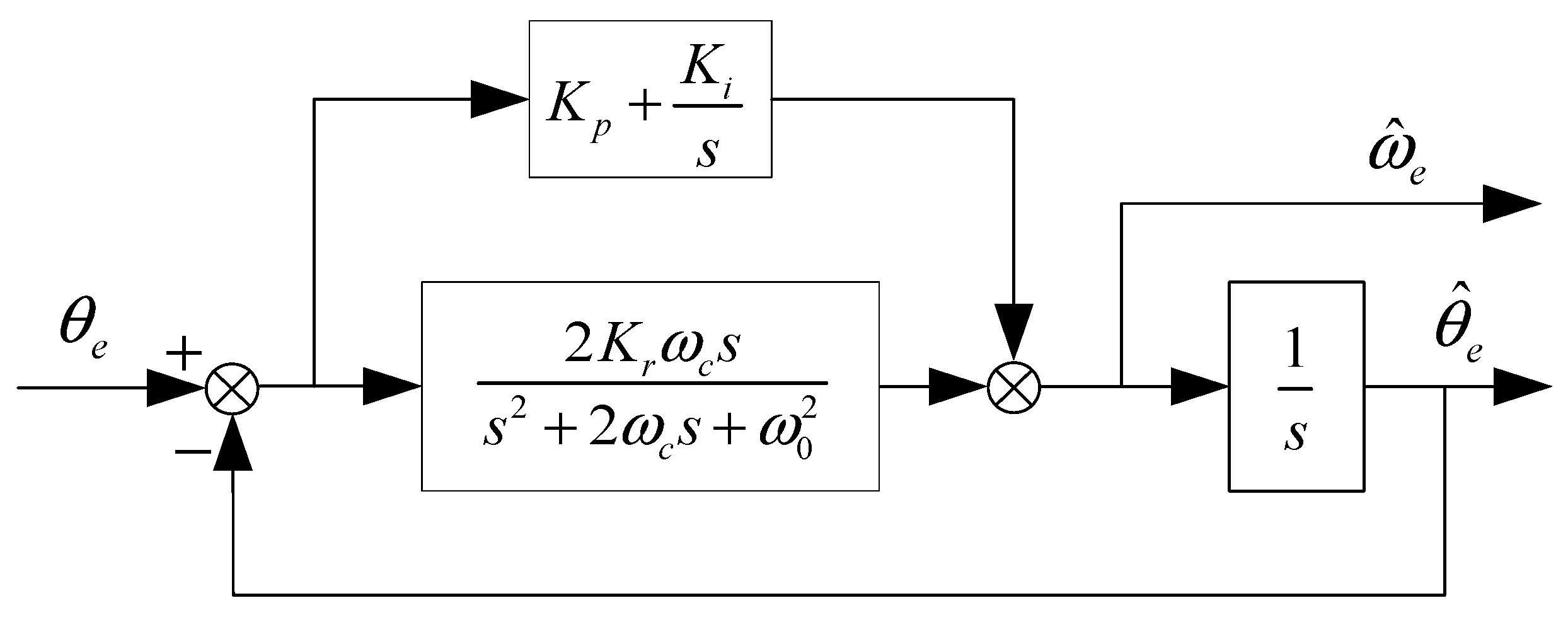
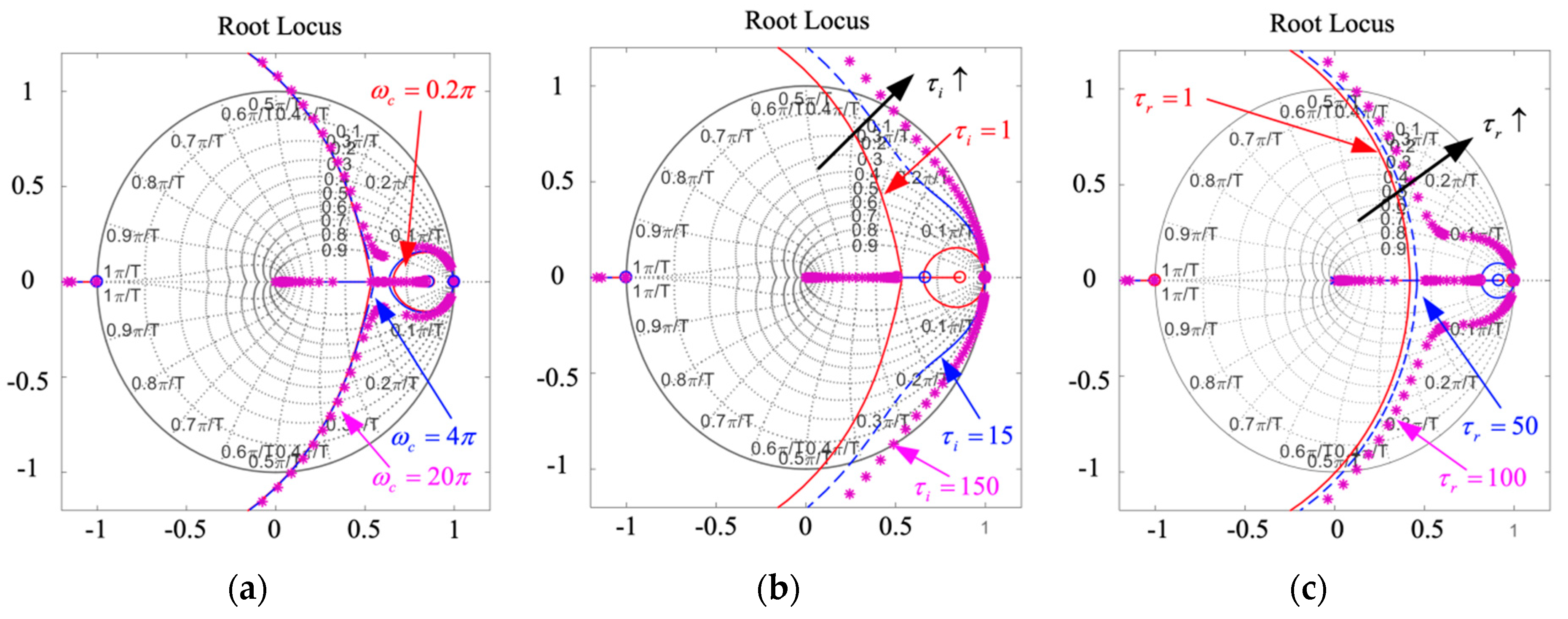
3.2. Improved Position Estimator Based on PIR Controller
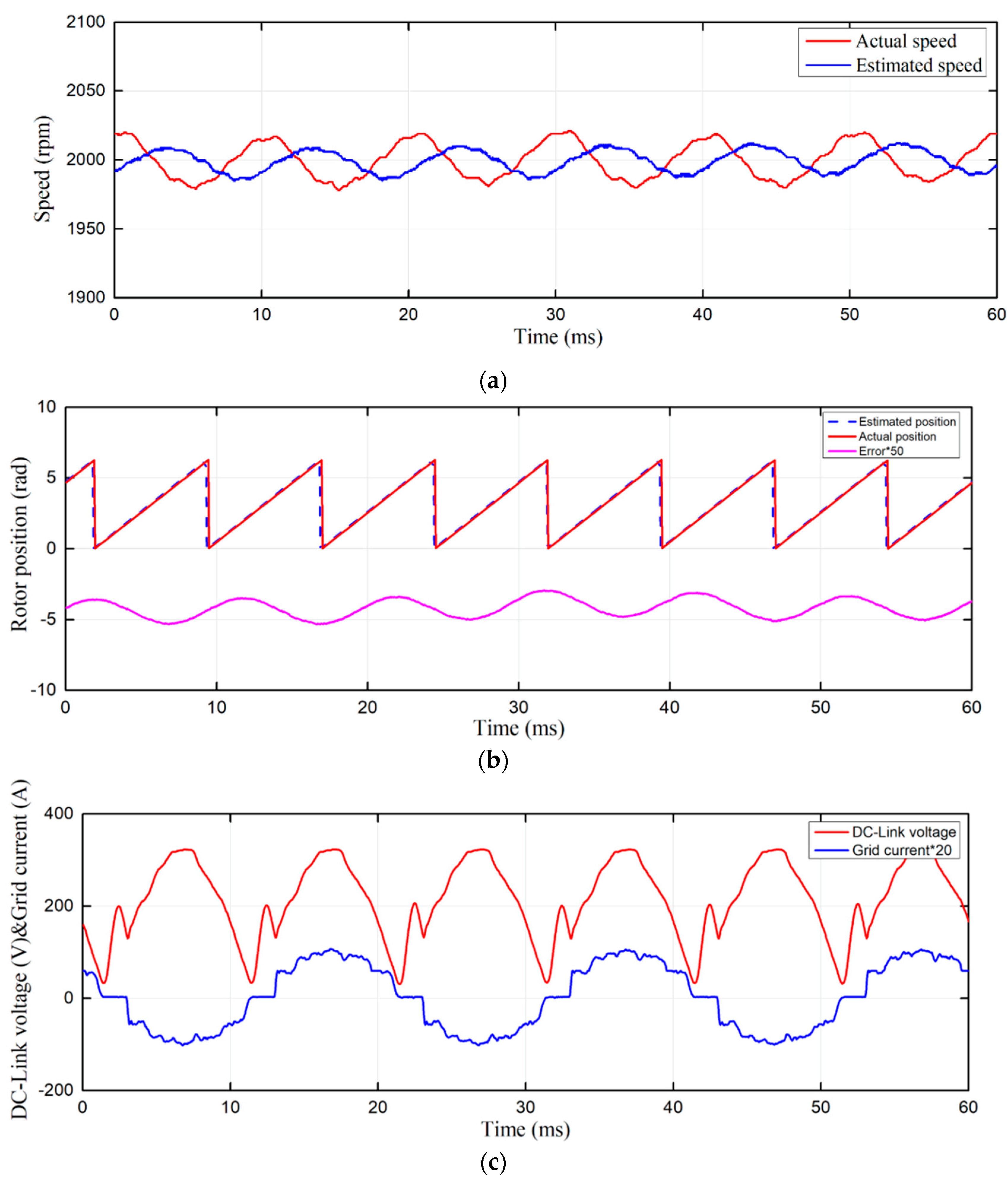
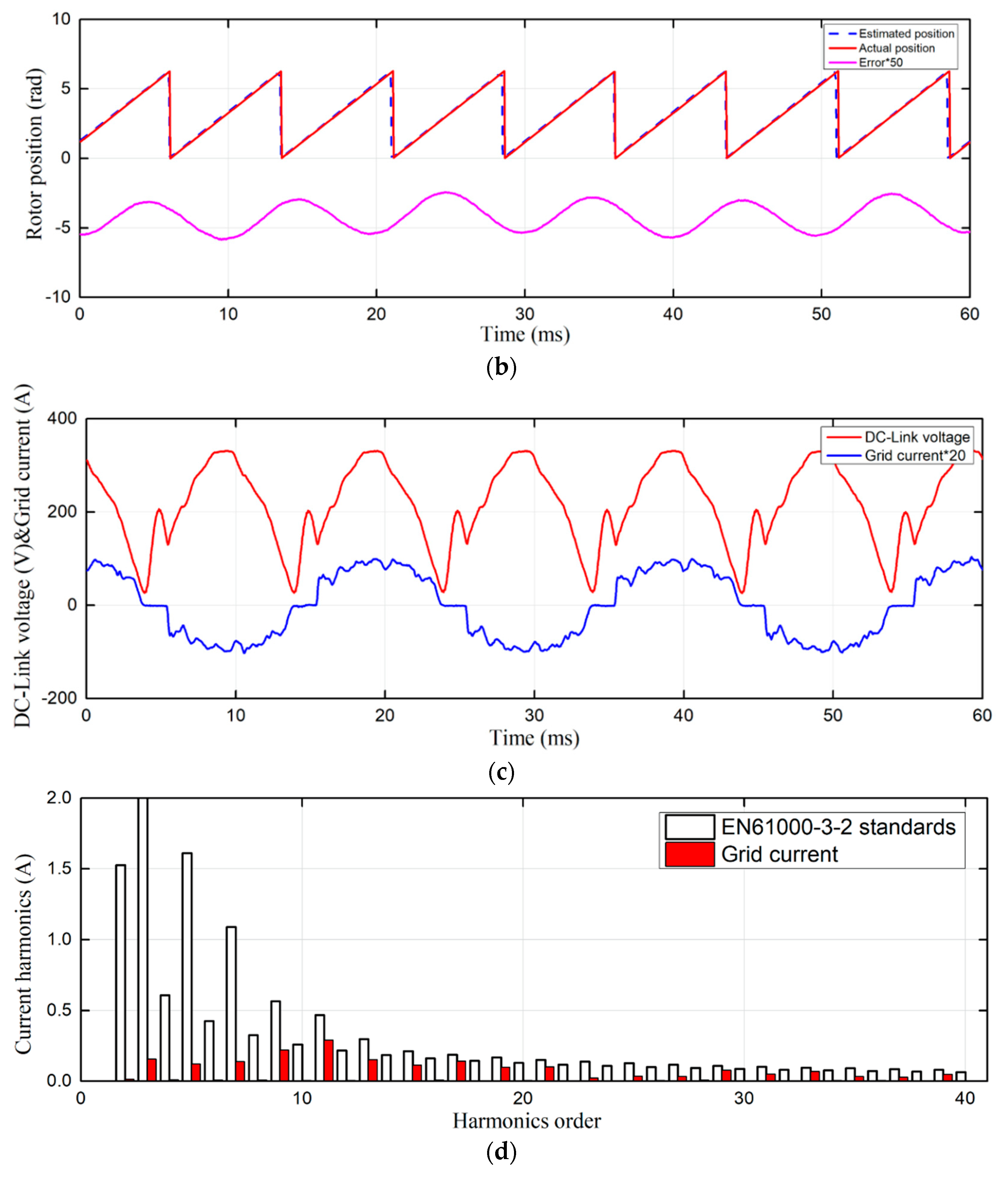
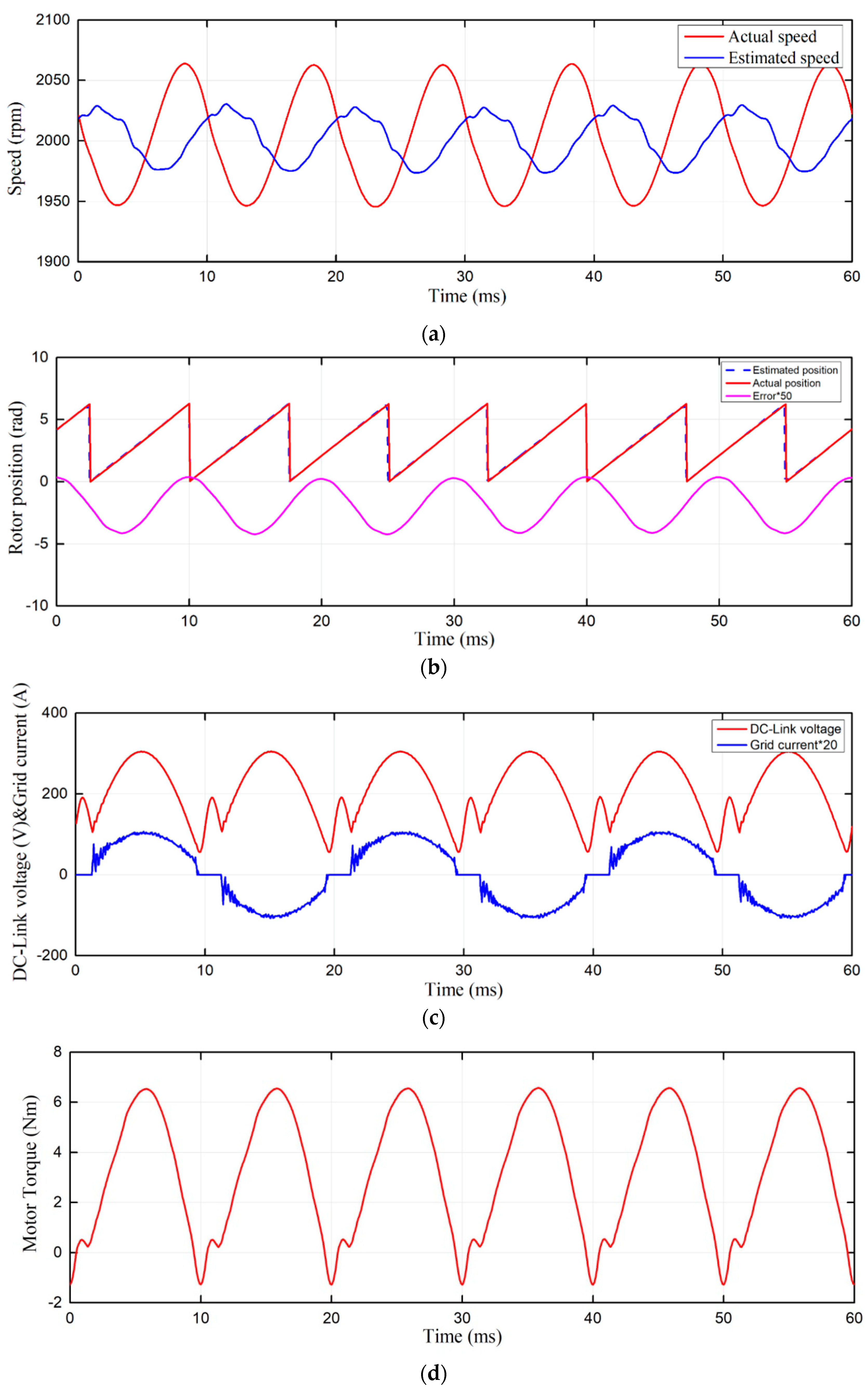
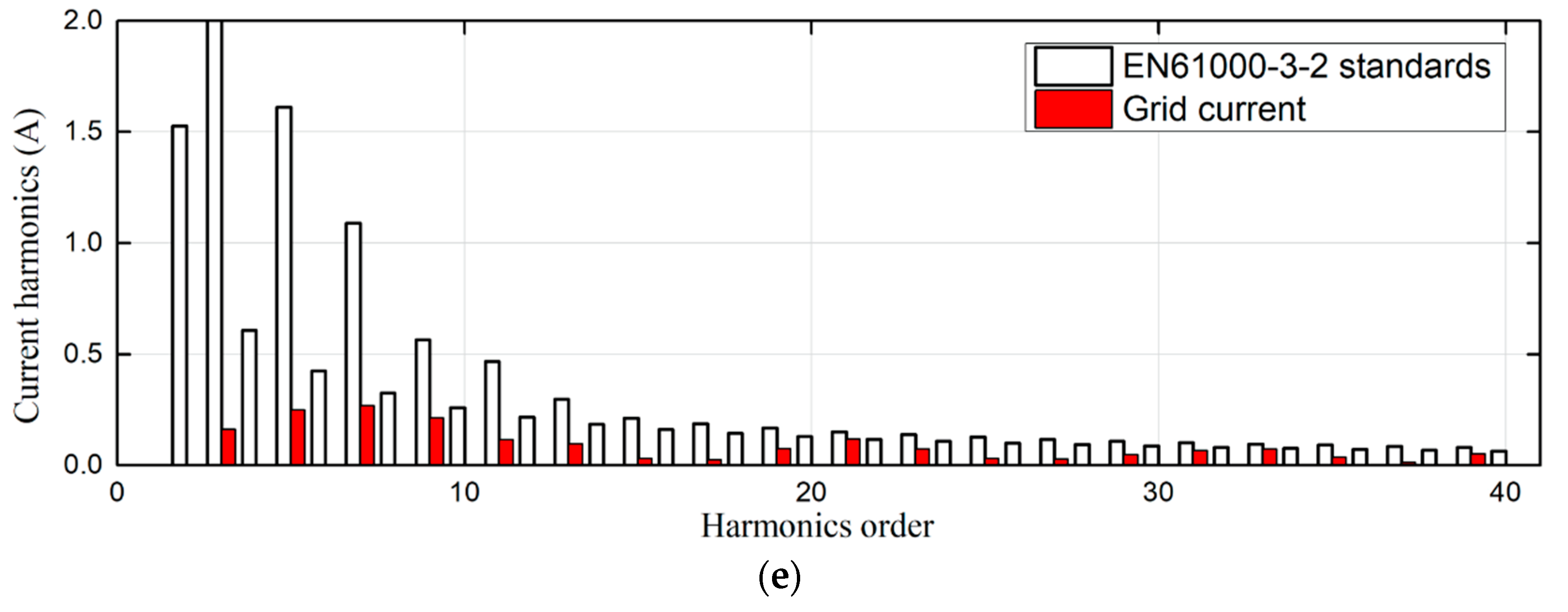
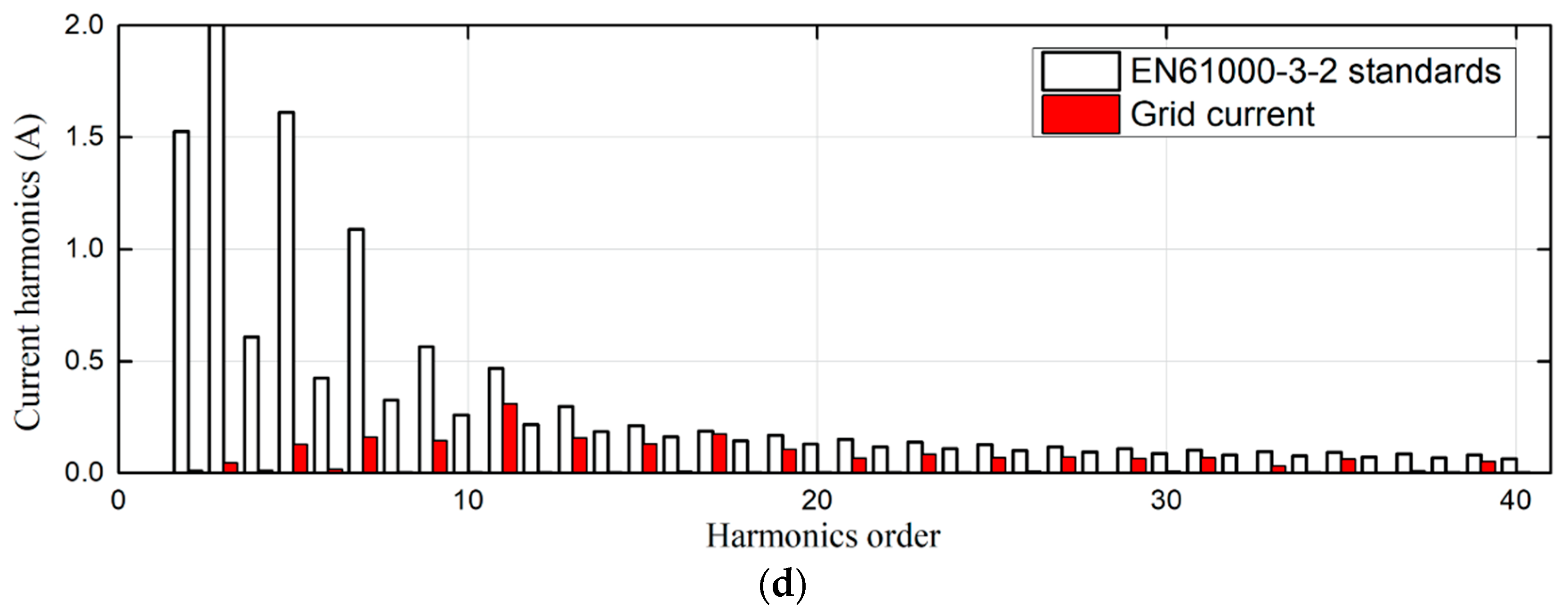
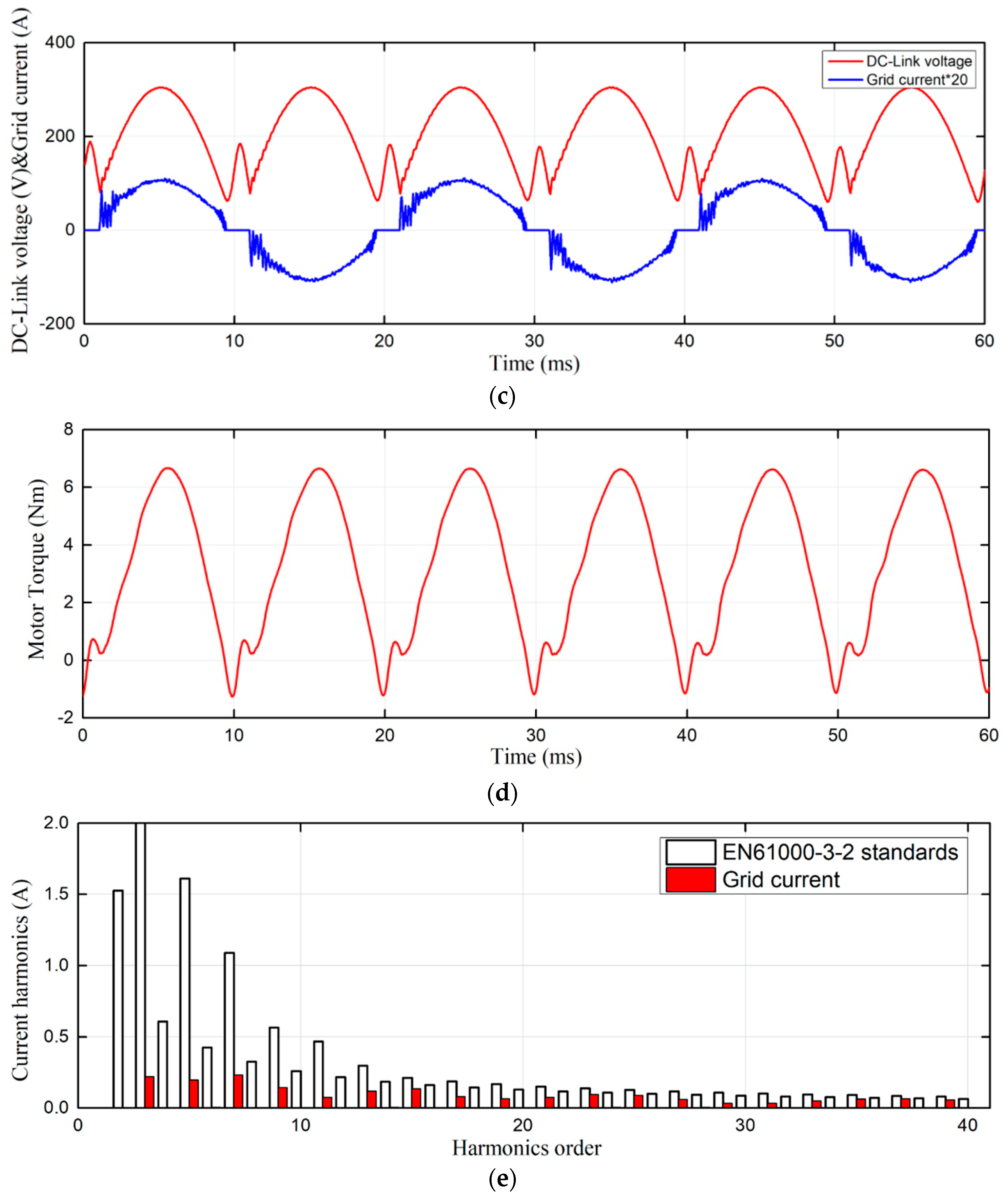
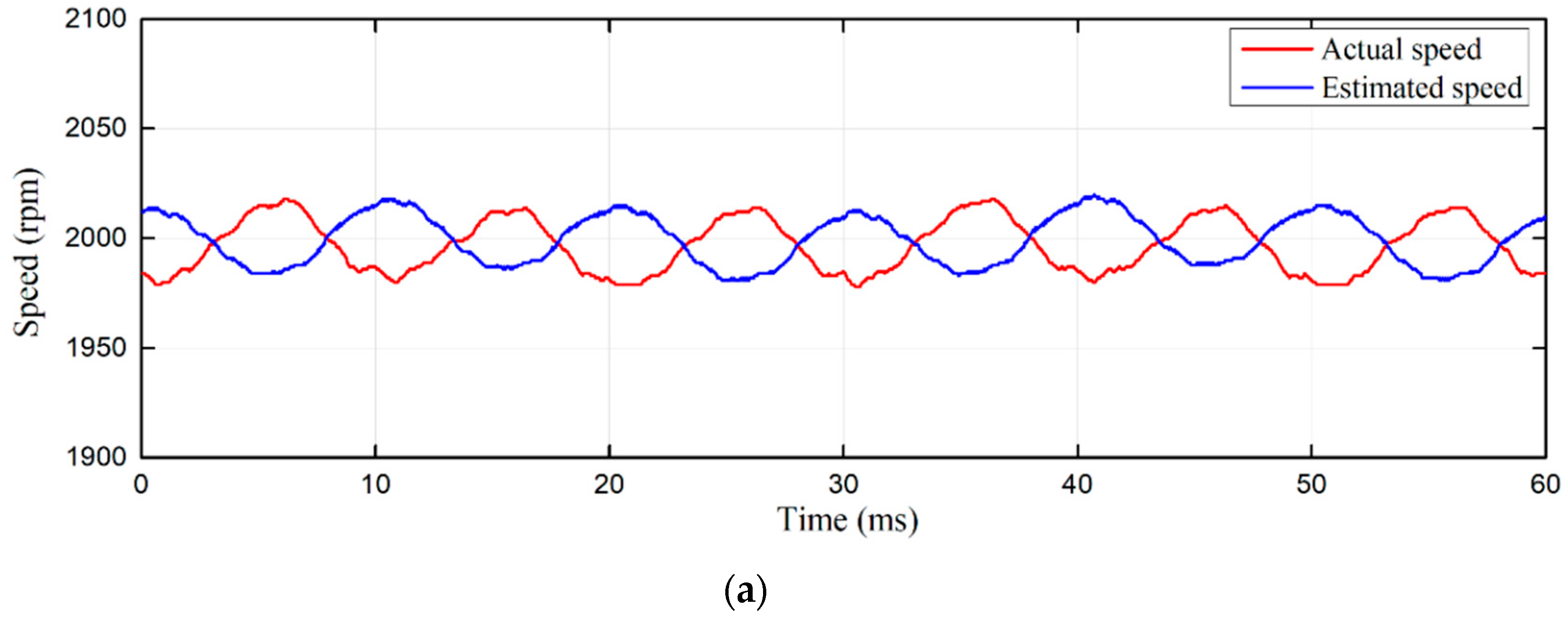
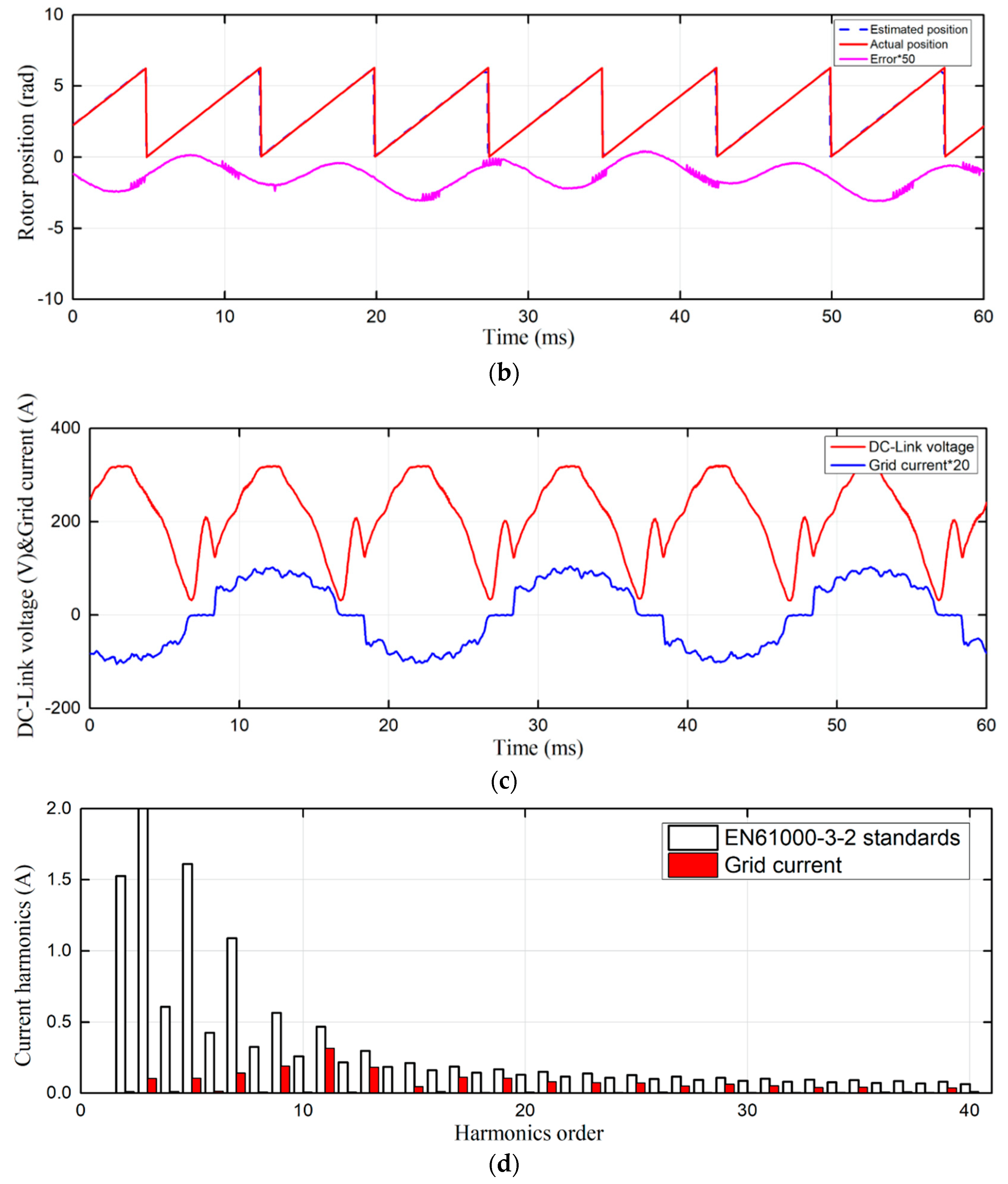
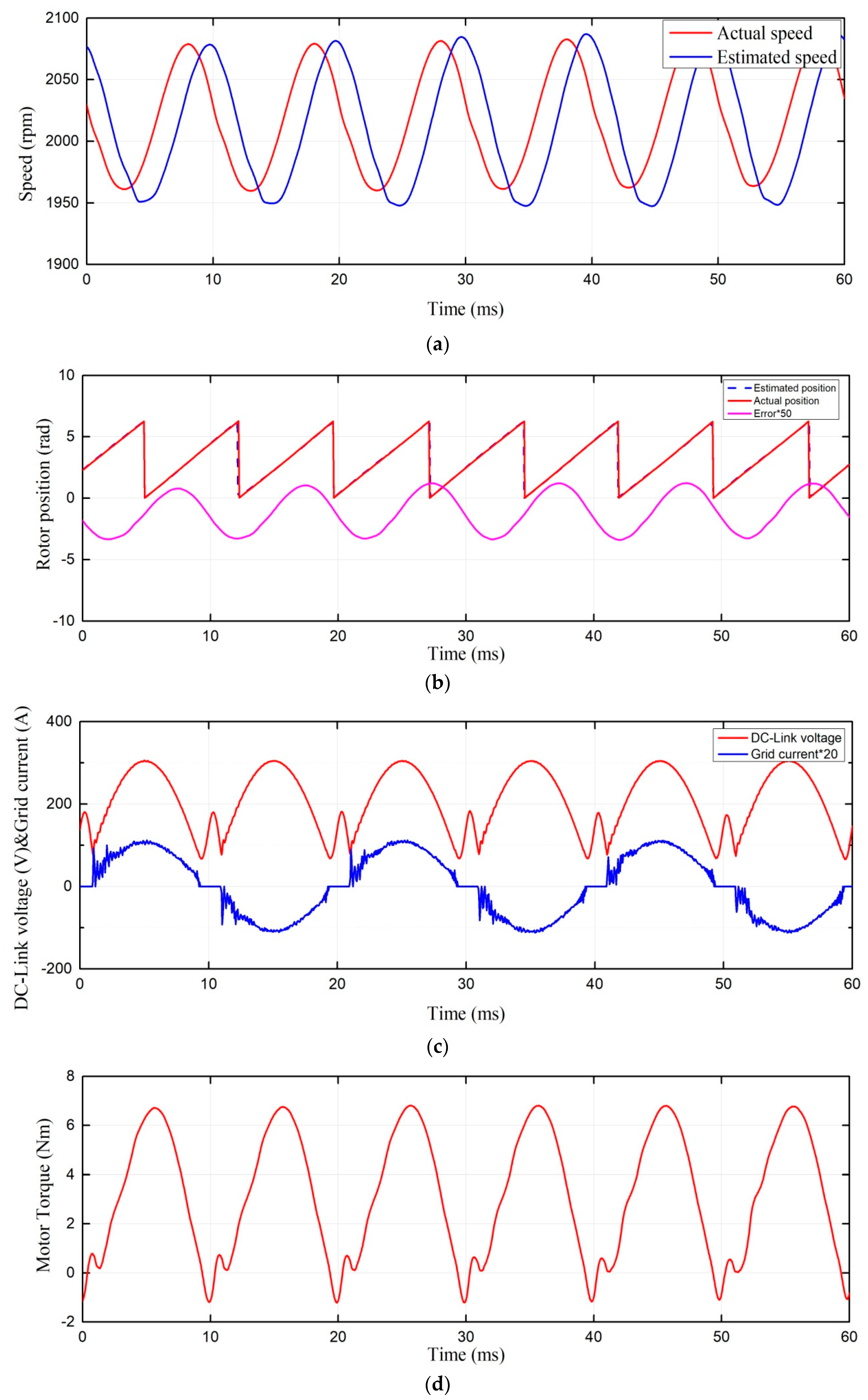
4. Simulation and Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dutta, R.; Rahman, M.F. Design and analysis of an interior permanent magnet (IPM) machine with very wide constant power operation range. IEEE Trans. Energy Convers. 2008, 23, 25–33. [Google Scholar] [CrossRef]
- Jung, S.; Mi, C.C.; Nam, K. Torque control of IPMSM in the field-weakening region with improved DC-Link voltage utilization. IEEE Trans. Ind. Electron. 2015, 62, 3380–3387. [Google Scholar] [CrossRef]
- Tinazzi, F.; Zigliotto, M. Torque estimation in high-efficency IPM synchronous motor drives. IEEE Trans. Energy Convers. 2015, 30, 983–990. [Google Scholar] [CrossRef]
- Chen, Z.Q.; Tomita, M.; Doki, S.; Okuma, S. An extended electromotive force model for sensorless control of interior permanent magnet synchronous motors. IEEE Trans. Ind. Electron. 2003, 50, 288–295. [Google Scholar] [CrossRef]
- Wang, G.; Yang, R.; Xu, D. DSP-based control of sensorless IPMSM drives for wide-speed-range operation. IEEE Trans. Ind. Electron. 2013, 60, 720–727. [Google Scholar] [CrossRef]
- Sun, Y.; Preindl, M.; Sirouspour, S.; Emadi, A. Unified wide-speed sensorless scheme using nonlinear optimization for IPMSM drives. IEEE Trans. Ind. Electron. 2017, 32, 6308–6322. [Google Scholar] [CrossRef]
- Luo, X.; Tang, Q.; Shen, A.; Shen, H.; Xu, J. A combining FPE and additional test vectors hybrid strategy for IPMSM sensorless control. IEEE Trans. Power Electron. 2018, 33, 6104–6113. [Google Scholar] [CrossRef]
- Luo, X.; Tang, Q.; Shen, A.; Shen, H.; Zhang, Q. PMSM sensorless control by injecting HF pulsating carrier signal into estimated fixed-frequency rotating reference frame. IEEE Trans. Ind. Electron. 2016, 63, 2294–2303. [Google Scholar] [CrossRef]
- Bernardes, T.; Montagner, V.F.; Grundling, H.A.; Pinheiro, H. Discrete-time sliding mode observer for sensorless vector control of permanent magnet synchronous machine. IEEE Trans. Ind. Electron. 2014, 61, 1679–1691. [Google Scholar] [CrossRef]
- Wang, G.; Zhan, H.; Zhang, G.; Gui, X.; Xu, D. Adaptive compensation method of position estimation harmonic error for EMF-based observer in sensorless IPMSM drives. IEEE Trans. Power Electron. 2014, 29, 3055–3064. [Google Scholar] [CrossRef]
- Qiao, Z.; Shi, T.; Wang, Y.; Yan, Y.; Xia, C.; He, X. New sliding-mode observer for position sensorless control of permanent-magnet synchronous motor. IEEE Trans. Ind. Electron. 2013, 60, 710–719. [Google Scholar] [CrossRef]
- Son, Y.; Ha, J.I. Direct power control of three phase inverter for grid input current shaping of single phase diode rectifier with small DC-link capacitor. IEEE Trans. Power Electron. 2015, 30, 3794–3803. [Google Scholar] [CrossRef]
- Son, Y.; Ha, J.I. Discontinuous grid current control of motor drive system with single-phase diode rectifier and small DC-link capacitor. IEEE Trans. Power Electron. 2017, 32, 1324–1334. [Google Scholar] [CrossRef]
- Shin, H.; Son, Y.; Ha, J.I. Grid current shaping method with DC-link shunt compensator for three-phase diode rectifier-fed motor drive system. IEEE Trans. Power Electron. 2017, 32, 1279–1288. [Google Scholar] [CrossRef]
- Shin, H.; Son, Y.; Chae, Y.H.; Ha, J.I. Single-phase grid connected motor drive system with DC-link shunt compensator and small DC-link capacitor. IEEE Trans. Power Electron. 2017, 32, 1268–1278. [Google Scholar] [CrossRef]
- Zhao, N.; Wang, G.; Xu, D.; Zhu, L.; Zhang, G.; Huo, J. Inverter power control based on DC-link voltage regulation for IPMSM drives without electrolytic capacitors. IEEE Trans. Power Electron. 2018, 33, 558–571. [Google Scholar] [CrossRef]
- Bao, D.; Pan, X.; Wang, Y. A novel hybrid control method for single-phase-input variable frequency speed control system with a small DC-link capacitor. IEEE Trans. Power Electron. 2019, 34, 9016–9032. [Google Scholar] [CrossRef]
- Kwak, B.; Um, J.H.; Seok, J.K. Direct active and reactive power control of three-phase inverter for AC motor drives with small DC-link capacitors fed by single-phase diode rectifier. IEEE Trans. Ind. Appl. 2019, 55, 3842–3850. [Google Scholar] [CrossRef]
- Wang, D.; Lu, K.; Rasmussen, P.; Mathe, L.; Feng, Y.; Blaabjerg, F. Voltage modulation using virtual positive impedance concept for active damping of small DC-link drive system. IEEE Trans. Power Electron. 2018, 33, 10611–10621. [Google Scholar] [CrossRef]
- Jung, H.S.; Chee, S.J.; Sul, S.K.; Park, Y.J.; Park, H.S.; Kim, W.K. Control of three-phase inverter for AC motor drive with small DC-link capacitor fed by single-phase AC source. IEEE Trans. Ind. Appl. 2014, 50, 1074–1081. [Google Scholar] [CrossRef]
- Abe, K.; Haga, H.; Ohishi, K.; Yokokura, Y. Fine current harmonics reduction method for electrolytic capacitor-less and inductor-less inverter based on motor torque control and fast voltage feedforward control for IPMSM. IEEE Trans. Ind. Electron. 2017, 64, 1071–1080. [Google Scholar] [CrossRef]
- Abe, K.; Haga, H.; Ohishi, K.; Yokokura, Y. Direct DC-link current control considering voltage saturation for realization of sinusoidal source current waveform without passive components for IPMSM drives. IEEE Trans. Ind. Electron. 2018, 65, 3805–3814. [Google Scholar] [CrossRef]
- Inazuma, K.; Utsugi, H.; Ohishi, K.; Haga, H. High-power-factor single-phase diode rectifier driven by repetitively controlled IPM motor. IEEE Trans. Ind. Electron. 2013, 60, 4427–4437. [Google Scholar] [CrossRef]
- Hinkkanen, M.; Luomi, J. Induction motor drives equipped with diode rectifier and small DC-link capacitance. IEEE Trans. Ind. Electron. 2008, 55, 312–320. [Google Scholar] [CrossRef]
- Huang, Y.; Xu, Y.; Li, Y.; Zou, J. A modified sensorless method for PMSM drive with small DC-link capacitor. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Harbin, China, 2–5 August 2017; pp. 1–5. [Google Scholar]
- Luo, H.; Chen, K.; Wu, G.; Yin, Q. Sensorless vector control of IPMSM drive system with small DC-link capacitor. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 November 2015; pp. 1–6. [Google Scholar]
- Liang, D.; Li, J.; Qu, R. Sensorless control of permanent magnet synchronous machine based on second-order sliding-mode observer with online resistance estimation. IEEE Trans. Ind. Appl. 2017, 53, 3672–3682. [Google Scholar] [CrossRef]
- Colombo, L.; Corradini, M.; Cristofaro, A.; Ippoliti, G.; Orlando, G. An embedded strategy for online identification of PMSM parameters and sensorless control. IEEE Trans. Control Syst. Technol. 2019, 27, 2444–2452. [Google Scholar] [CrossRef]
- Zhao, Y.; Qiao, W.; Wu, L. Dead-time effect analysis and compensation for a sliding-mode position observer-based sensorless IPMSM control system. IEEE Trans. Ind. Appl. 2015, 51, 2528–2535. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, Y.; Zou, J. Sliding-mode sensorless control of PMSM with inverter nonlinearity compensation. IEEE Trans. Power Electron. 2019, 34, 10206–10220. [Google Scholar] [CrossRef]
- Liang, D.; Li, J.; Qu, R.; Kong, W. Adaptive second-order sliding-mode observer for PMSM sensorless control considering VSI nonlinearity. IEEE Trans. Power Electron. 2018, 33, 8994–9004. [Google Scholar] [CrossRef]
- Song, X.; Fang, J.; Han, B.; Zheng, S. Adaptive compensation method for high-speed surface PMSM sensorless drives of EMF-based position estimation error. IEEE Trans. Power Electron. 2016, 31, 1438–1449. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, G.; Xu, D.; Zhao, N. ADALINE-network-based PLL for position sensorless interior permanent magnet synchronous motor drives. IEEE Trans. Power Electron. 2016, 31, 1450–1460. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, G.; Xu, D.; Ni, R.; Jia, C. Multiple-AVF cross-feedback-network-based position error harmonic fluctuation elimination for sensorless IPMSM drives. IEEE Trans. Ind. Electron. 2016, 63, 821–831. [Google Scholar] [CrossRef]
- Quang, N.K.; Hieu, N.T.; Ha, Q.P. FPGA-based sensorless PMSM speed control using reduced-order extended Kalman filters. IEEE Trans. Ind. Electron. 2014, 61, 6574–6582. [Google Scholar] [CrossRef]
- Mai, Z.; Zhang, X. FPGA implementation of sensorless sliding mode observer with a novel rotation direction detection for PMSM drives. IEEE Access 2018, 6, 55528–55536. [Google Scholar] [CrossRef]
- Qian, W.; Zhang, X.; Jin, F.; Bai, H.; Lu, D.; Cheng, B. Using high-control-bandwidth FPGA and SiC inverters to enhance high-frequency injection sensorless control in interior permanent magnet synchronous machine. IEEE Access 2018, 6, 42454–42466. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, G.; Xu, D.; Yu, Y. Discrete-time low-frequency-ratio synchronous-frame full-order observer for position sensorless IPMSM drives. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 870–879. [Google Scholar] [CrossRef]
- Lee, H.; Lee, J. Design of iterative sliding mode observer for sensorless PMSM control. IEEE Trans. Control Syst. Technol. 2013, 21, 1394–1399. [Google Scholar] [CrossRef]
- Liu, J.M.; Zhu, Z.Q. Improved sensorless control of permanent magnet synchronous machine based on third-harmonic back EMF. IEEE Trans. Ind. Appl. 2014, 50, 1861–1870. [Google Scholar] [CrossRef]
- Kaura, V.B.; Niewiadomski, W. Sampling of discontinuous voltage and current signals in electrical drives: a system approach. IEEE Trans. Ind. Appl. 1998, 34, 1123–1130. [Google Scholar]
- Yan, Q.; Wu, X.; Yuan, X.; Geng, Y.; Zhang, Q. Minimization of the DC component in transformerless three-phase grid-connected photovoltaic inverters. IEEE Trans. Ind. Electron. 2015, 30, 3984–3997. [Google Scholar] [CrossRef]
- Lamsahel, H.; Mutschler, P. Permanent magnet drives with reduced dc-link capacitor for home appliances. In Proceedings of the 35th IEEE IECON, Porto, Portugal, 3–5 November 2009; pp. 725–730. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Rate power | 1.0 kW | Flux linkage | 0.104 Wb |
| Rate speed | 2000 r/min | Switching frequency | 10 kHz |
| Pole pairs | 4 | Film capacitor | 8 uF |
| dq-axis inductance | 4.94/10.74 mH | Grid voltage | 220 Vrms |
| Stator resistance | 0.845 Ω | Grid frequency | 50 Hz |
| Line inductance | 0.2 mH | Line resistance | 0.5 Ω |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, Q.; Li, H.; Luo, H.; Wang, Q.; Xu, C. An Improved Sensorless Vector Control Method for IPMSM Drive with Small DC-Link Capacitors. Energies 2020, 13, 580. https://doi.org/10.3390/en13030580
Yin Q, Li H, Luo H, Wang Q, Xu C. An Improved Sensorless Vector Control Method for IPMSM Drive with Small DC-Link Capacitors. Energies. 2020; 13(3):580. https://doi.org/10.3390/en13030580
Chicago/Turabian StyleYin, Quan, Haichun Li, Hui Luo, Qingyi Wang, and Chendong Xu. 2020. "An Improved Sensorless Vector Control Method for IPMSM Drive with Small DC-Link Capacitors" Energies 13, no. 3: 580. https://doi.org/10.3390/en13030580
APA StyleYin, Q., Li, H., Luo, H., Wang, Q., & Xu, C. (2020). An Improved Sensorless Vector Control Method for IPMSM Drive with Small DC-Link Capacitors. Energies, 13(3), 580. https://doi.org/10.3390/en13030580